coordination and networking of groups of mobile autonomous agents
DESCRIPTION
COORDINATION and NETWORKING of GROUPS OF MOBILE AUTONOMOUS AGENTS. COOPERATIVE CONTROL. - PowerPoint PPT PresentationTRANSCRIPT

COORDINATION and NETWORKING of
GROUPS OF MOBILE AUTONOMOUS
AGENTS

Yale is the lead institution on a cross-disciplinary NSF project {with Harvard, Princeton, U. of Washington} aimed at understanding how various animal groups such as fish schools and bird flocks coordinate their collective motions and how groups of mobile autonomous agents such as AUVs might use these biological principles to collectively perform useful tasks such as data gathering, search and rescue, in a safe, cooperative, and coordinated manner.
A FISH WHORL The Grouper
COOPERATIVE CONTROL

ROADMAP
The “Flocking Problem”
The “Multi-Agent Rendezvous Problem”
“Maintaining Vehicle Formations Using Rigid GraphTheory”
“Sensor Localization in Large Ad Hoc Communication Networks”
1. Rigid Graph Theory
2. Emergent Behavior

By an n vehicle formation is meant collection of n mobile autonomous agents {i.e., robots} moving through real 2 or 3 space.
Maintaining a formation means making sure that the distance between each pair of agents remains {nominally} unchanged over time.
Formation maintenance is typically achieved by requiring some, but not allagent pairs to maintain fixed distances between them.
We’ve developed a framework based on the theory of “rigid graphs” from classical mechanics {Cayley, Maxwell,…} for devising provably correct procedures for so maintaining very large formations.
Maintaining Vehicle Formations Using Rigid Graph Theory

Sensor Localization in Large Ad Hoc Communication Networks
Each Sensor:
2. can communicate with neighbors.
3. knows distance from each neighbor.
Some sensors know theirpositions in world coordinates.
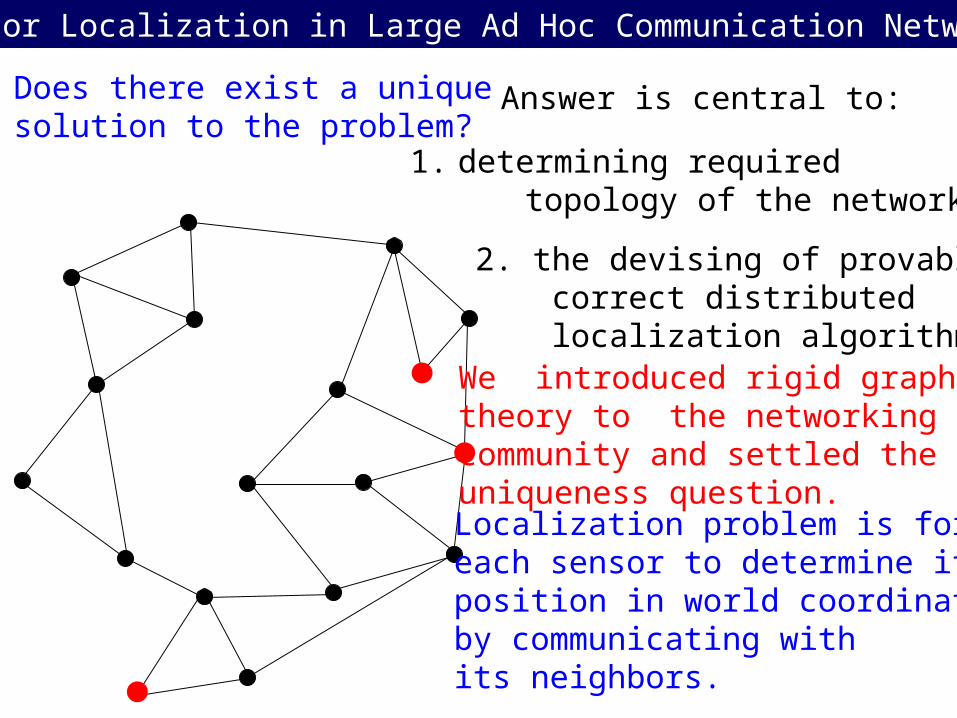
Localization problem is for each sensor to determine itsposition in world coordinatesby communicating with its neighbors.
500m
Does there exist a unique solution to the problem? 1. is fixed in position.
sensors
Localization problem is for each sensor to determine itsposition in world coordinatesby communicating with its neighbors.
Does there exist a unique solution to the problem?
Answer is central to:
1. determining required topology of the network.
2. the devising of provable correct distributed localization algorithms.
We introduced rigid graph theory to the networking community and settled the uniqueness question.
Sensor Localization in Large Ad Hoc Communication Networks

i= headingi
s = speeds
In a recent Phy. Rev. Letters paper Vicsek et al. simulated a flock of n agents {particles} all moving in the plane at the same speed s, but with different headings 1, 2, …, n
Each agent’s heading is updated using a local rule based on the averageof its own current heading plus the headings of its “neighbors.”
Vicsek’s simulations demonstrate that these nearest neighbor rules can cause all agents to eventually move in the same direction despite the absence of centralized coordination and despite the fact that each agent’s set of neighbors changes with time.
Using graph theory and the theory of non-homogeneous Markov chains we haveprovided a complete theoretical explanation for this observed behavior.
THE FLOCKING PROBLEM
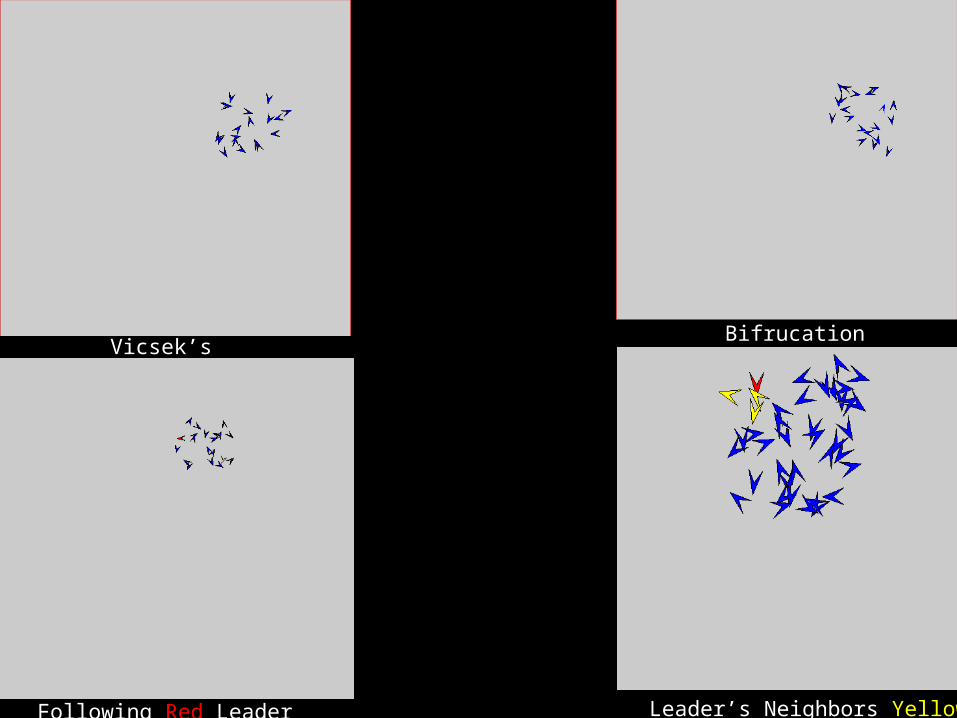
Following Red Leader
Vicsek’s Bifrucation
Leader’s Neighbors Yellow

r
Each agent is able to continuously sense the relative positions of all other agents in its “sensing region” where by agent i’s a sensing region is meant a closed disk of radius r centered at agent i’s current position.
sensing region
deals with set of n mobile autonomous agents which can all move in the plane.
Problem: Devise local control strategies, one for each agent, which without active communication between agents, cause all members of the group to eventually rendezvous at a single unspecified point.
We have devised a provably correct solution to this problem which providesa framework for the development of a wide range of group maneuvers {e.g., forming Yale Marching Band formations} using decentralized control.
The Multi-agent Rendezvous Problem

connected
disconnected trapping

Concluding Remarks
New data structures, models, etc.are needed to represent large groupsof mobile autonomous agents at various degrees of granularity, for pur- poses of simulations, management, analysis, communication and control.
Such representations will exploit tools from both graph theory andfrom the theory of dynamical systems
At least initially, individual agent descriptions using simplekinematic and dynamic models will suffice.
System complexity will stem more from the number of agent modelsbeing studied than from the detailed properties of the individualagent models.
New concepts of robustness, stability, etc. are needed to understand such systems – to address issues such as cascade failure, security,reliability, coordination, etc.