convexity of option prices in the heston model
TRANSCRIPT

Convexity of option prices in the Heston model
Jian Wang
U.U.D.M. Project Report 2007:3
Examensarbete i matematik, 20 poäng
Handledare och examinator: Johan Tysk
Januari 2007
Department of Mathematics
Uppsala University

Abstract The Heston model is a stochastic volatility model. We show that the option price in the Heston model is convex in the underlying asset for convex contract functions. We verify this using the explicit formula for European call options and extend to the general case using an approximation argument. Some other properties of the Heston model are also discussed. Finally, we illustrate the results using numerical methods.
I

Acknowledgment
· My supervisor: Professor Johan Tysk
· Every teacher who ever taught me at Uppsala University
· My parents and friends
II

Contents 1 Introduction……………………………………………………………………....1
2 Volatility model ………………………………………………….…….…3
2.1 Implied volatility and local volatility…………………………….…….…….3 2.2 Stochastic volatility…………………………………………….…………….4 2.3 The Heston Model……………………………………………….…………..5 2.3.1 Motivation……………………………………………….………….5 2.3.2 Model and parameters………………………………………………6
3 Pricing method………………………………………………………………….7 3.1 The Heston PDE…………………………………………………………...…7 3.2 Closed form solution………………………………………….…………….12
4 Convexity……………………………………………………..…………………14 4.1 Introduction of convexity………………………………….……………….14 4.2 Theorem for convexity...……………………………………………………16
5 Numerical method………………………………………………………..……21 5.1 Introduction………………………….………………………………..…….21 5.1.1 Main idea…………………………………………………………..21 5.1.2 Detail……………………………………………….……………...22 5.2 Implementation………………………….……………………………..……24 5.2.1 Closed form solution……………………………………………....24 5.2.2 Finite difference method…………………………………………..24
5.3 Results ………………………………………………………….…….…….29 5.3.1 Results from the closed form solution……………………...……..29 5.3.2 Results from the finite difference method…………………………32 5.3.3 Comparison between the results of the previous sections……..35
6 Conclusion……………………………………………………………………….38
Reference……………………………………………………………….…………….39
III

Chapter 1 Introduction
In 1973, there was a landmark paper about option pricing published by F. Black and
M. Scholes [1]. The option market grew significantly after this, which is expressed
not only by the amount of deals rising, but also by the kinds of option increasing due
to the requirement from investors and risk hedging.
However there is a major problem for the original Black-Scholes namely the choice of
volatility. There is a general phenomenon of volatility varying by strike which is
referred as volatility skew or volatility smile. After this, the term local volatility
became another choice of volatility. In 1994, Dupire [2] proposed a local volatility
function which can be calculated with different strike price and maturity time.
Because of the statistical difficulties for finding local volatility function, people
needed more appropriate models.
For many years empirical observation of volatility, people discovered that volatility
varies randomly. Hence stochastic volatility models seem natural. After many years of
academic research, several models have been developed, such as the Hull-White
model [3], the Scott model [4] and the Heston model [5]. From another perspective,
people also discovered that convexity is an important property of the option price. If
the convexity of the option price is preserved, the option price will increase as the
volatility increases. For people in the real market, such as: option writers, investors,
they don’t know exact value of the volatility; people use implied volatility instead.
Consequently, those people who overestimate the volatility will overestimate the
option price; and others who underestimate the volatility will underestimate the option
price.
1

In this paper, I decide to use the Heston model [5], which is one of the most widely
used stochastic volatility models. First, the convexity for European call option in the
Heston model will be shown. Then, the convexity for the general case will be
discussed using an approximation argument.
We also consider numerical methods for finding the option price in the Heston model.
The numerical results are compared with the closed form solution.
2

Chapter 2 Volatility model
2.1 Implied volatility and local volatility
In [1], a stochastic differential equation is given to present the behavior of an
underlying asset. It is given as follow:
dS rSdt Sdσ ω= + (1)
This σ represents the volatility. In [1], the volatility σ is assumed to be constant.
However, most derivative markets indicate that the volatility varies by the strike price.
One could easily get the implied volatility by using the Black-Scholes pricing formula
to calculate backward if the strike price and the corresponding option price are given.
As described in [6], “Implied volatility is the wrong number to put into wrong formula
to obtain the correct price”. The implied volatility is always calculable. The
phenomenon which is referred as volatility skew or volatility smile is illustrated in
Figure 1.
Figure 1 volatility smile and volatility skew
3

Even though the volatility smile or the volatility skew exists, the Black-Scholes
pricing formula is still used widely in practice.
A formula for calculating local volatility was proposed by Dupire [2] in 1994. Dupire
assumed that asset price acts differently comparing with Black-Scholes model, the
difference is that one could use a volatility function instead of constant volatility.
Such models have the following form:
( , )dS rSdt t S dσ ω= + . (2)
The volatility function can for instance have following form:
( , )t S S ασ −= (3)
where α is a real number.
The main idea of his formula is that one can obtain the local volatility if the option
price for all strike price and maturity time is given. Theoretically the investor can
obtain the local volatility using Dupire’s formula. However the choices of volatility
function are extensive.
2.2 Stochastic volatility
Empirical observation of volatility shows that volatility actually varies and seems
randomly varying. In some sense, one would like a volatility model which reflects
randomness and only depends on few parameters. The stochastic volatility models
which involve Brownian motion seem to be the appropriate choice. Several famous
stochastic volatility models are illustrated in Table 1.
4

Hull-White model s s
v
s
dS Sdt vSdWdv vdt vdWdW dW dt
σ
σ
μμ ξ
ρ
= += +
=i
Scott model ( )
ys
y
s y
dS Sdt e SdWdy y dt dW
dW dW dt
μκ θ α
ρ
= +
= − +
=i
Heston model ( )s
v
s v
dS Sdt vSdW
dv v dt vdWdW dW dt
μ
κ θ αρ
= +
= − +
=i
Table 1 stochastic volatility
In those models we note that the Brownian motions are correlated.
2.3 The Heston Model
2.3.1 Motivation
Many empirical studies have indicated that the log-return of underlying asset, such as
stock, is not always normal distributed. At the same time, the return and volatility are
negative correlated. Those facts cannot be sufficiently reflected by the Black-Scholes
model. In contrast, the Heston model is much more appropriate, since it can present
many different distributions. The reason for presenting many distributions is the
parameter “ ρ ”. It is the correlation between the two dependent Brownian motions,
also representing the relationship between the return and the volatility of underlying
asset.
5

2.3.2 Model and Parameters
Standard stochastic differential equations (SDE) for the Heston model are given as
follows:
1
2
1 2
( )t t t t
t t t
dS S dt v S dW
dv v dt v dWdW dW dt
μ
κ θ σρ
= +
= − +
=i. (4)
where and represent the price and the volatility of underlying asset
respectively, and are two Brownian motions with correlation
tS tv
1W 2W ρ . In the
process of volatility, a mean reversion process is chosen. κ is the rate of reversion,
θ is the long-term mean, and σ is the volatility of volatility.
The correlation also represents the relation between the volatility and the underlying
asset. The process of is called mean reversion process which is proposed by Cox,
Ingersoll and Ross in [7]. If we set
tv
κ and θ to positive, the drift of volatility will
decrease as the volatility increases. This property makes sure that the volatility does
not increase without a limitation. Furthermore, the process of volatility never reaches
zero if 21 02
κθ σ− ≤ is fulfilled. A short proof for this property is given as follow
[8]:
For a n-dimensional Bessel process tB , the stochastic differential equation is denoted
as following:
12t
t
ndB dt dWB t−
= + . (5)
6

The Bessel process represents the Euclidean distance from origin to n-dimensional
Wiener process. It is well known that the Bessel process tB never reaches origin if
. One could denote that 2n ≥2
2
4tV σ= tB , where σ is a real number. By using Ito’s
formula, one can obtain stochastic differential equation as follow:
2
4tdV ndt V dWσ σ= + t t . (6)
Compare (6) with the volatility process in the Heston Model.
2( )t t tdv v dt v dWκ θ σ= − + . (7)
So far, we can see the similarity from their forms. Furthermore, the process
performances similar to our volatility process near zero only if
tV
2
4nσκθ = . Since we
already know that the Bessel process tB never reaches origin if , thus it is
straightforward to obtain that our volatility process never reaches zero if following
inequality is fulfilled:
2n ≥
22
4 2 02
n κθ κθ σ1σ
= ≥ ⇒ − ≤ . (8)
7

Chapter 3 Pricing method
Once we have the stochastic volatility model, there are many ways to price the option.
However, it is important to begin with the partial differential equation (PDE).
3.1 The Heston PDE
First, it is very important to notice that the Heston model is incomplete. There are
different methods to hedge for deriving the Heston PDE, the same method also could
be used to other stochastic volatility models. In this paper, the idea used for hedging is
that the value of hedging portfolio is at least same as the payoff of the option at time
maturity T. Since it is an incomplete market, the value of option therefore depends on
the hedging strategy which is different from the case of complete markets.
We denote contingent claim as , bond as ( , , )t tc S v t tB , and our portfolio consists of
the underlying asset, the bond and the contingent claim. We assume that the
underlying pays no dividend. In details, those assets have dynamics as follows:
Underlying
1
2
1 2
( )t t t t
t t t
dS S dt v S dW
dv v dt v dWdW dW dt
μ
κ θ σρ
= +
= − +
=i
Bond
t tdB rB dt= . . (9)
Contingent claim
( , , )t tc S v t . . (10)
8

Then we choose a certain proportion ( , , )α β γ for our assets, the value of our
portfolio becomes:
( , , )t t t t tF B S c S v tα β γ= + + . (11)
Under the requirement of self financing, it becomes:
( , , )t t t t tdF dB dS dc S v tα β γ= + + . (12)
Because of the non arbitrage assumption, the option price must be same
as the value of the portfolio:
( , , )t tu S v t
( , , )t t tu S v t F= . (13)
From (13) we have:
( , , )t t tdu S v t dF= . (14)
Using Ito’s formula we obtain:
2 2 22 2
2 2
1 2
1 1( ( )2 2t t t t t t t
t t t
u u u u u udu S v S v v S v dtt s v s v s v
u uS v dW v dWs v
μ κ θ σ σρ
σ
∂ ∂ ∂ ∂ ∂ ∂= + + − + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂
+ +∂ ∂
). (15)
2 2 22 2
2 2
1 2
1 1( ( )2 2
( ) ( )
t t t t t t t t
t t t t t t t
c c c c c cdF S v S v v S v dtt s v s v s v
c urB S dt S v S v dW v dWs v
γ μ κ θ σ σρ
α βμ γ β γσ
∂ ∂ ∂ ∂ ∂ ∂= + + − + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂
+ + + + +∂ ∂
). (16)
9

Since , the expressions in front of , and should be
same. This leads to following equations:
( , , )t t tdu S v t dF= 1dW 2dW dt
t t t t t t
t t
u cS v S v S vs su uv vv v
γ β
σ γσ
∂ ∂= +
∂ ∂∂ ∂
=∂ ∂
. (17)
From these equations, we can obtain the hedging proportion:
u cs suvcv
β γ
γ
∂ ∂= −∂ ∂∂∂=∂∂
. (18)
Now we substitute following expression into the term at front of in dt tdF
( , , ) ( , , )t t t t t t t tB F S c S v t u S c S v tα β γ β γ= − − = − − . (19)
We set those terms at front of in and equal to each other dt ( , , )t tdu S v t tdF
2 2
2 22 2
2 22 2
2 2
1 1( )2 2
1 1( ( )2 2
( )
t t t t t t t
t t t t t t t
t t
u u u u u uS v S v v S vt s v s v s v
c c c c cS v S v v S vt s v s v s
u S c r S
μ κ θ σ σρ
γ μ κ θ σ σρ
β γ βμ
∂ ∂ ∂ ∂ ∂ ∂+ + − + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
+ + − + + +∂ ∂ ∂ ∂ ∂ ∂ ∂
+ − − +
2
2
)cv
=
. (20)
10

Plug in β and γ , we can obtain following equation after appropriate adjustment:
2 2 22 2
2 2
2 2 22 2
2 2
1 1 1( ( ) ( )2 2
1 1 1( ( ) ( )2 2
t t t t t t t t
t t t t t t t t
u u u u u u uS v S v v S v ru r Su t s v s v s v sv
c c c c c c cS v S v v S v rc r Sc t s v s v s v sv
μ κ θ σ σρ μ
μ κ θ σ σρ μ
∂ ∂ ∂ ∂ ∂ ∂ ∂+ + − + + + − − −
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂ ∂+ + − + + + − − −
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂
)
)
=
(21)
Since we can derive such equation with any kind of contingent claim ,
hence the left hand side of the equation above only depends on , and t.
Furthermore, we can denote a function
( , , )t tc S v t
tS tv
( , , )t tS v tλ , and set ( , , )t tS v tλ equal to left
hand side of (21).
2 2 22 2
2 2
1 1( ( ) (2 2
( , , ) (22)
t t t t t t t
t t
u u u u u uS v S v v S v ru r St s v s v s v
uS v tv
μ κ θ σ σρ μ
λ
∂ ∂ ∂ ∂ ∂ ∂ ∂+ + − + + + − − −
∂ ∂ ∂ ∂ ∂ ∂ ∂∂
=∂
) )tus∂
After appropriate re-arrangements, we obtain:
2 2 22 2
2 2
1 1( ( ) ) 02 2t t t t t t t
u u u u u urS v S v v S v rut s v s v s v
κ θ λ σ σρ∂ ∂ ∂ ∂ ∂ ∂+ + − − + + + −
∂ ∂ ∂ ∂ ∂ ∂ ∂= . (23)
The above equation is the Heston PDE with market price of volatility riskλ , in the
case of no dividend. According to the proposal in [5], function ( , , )t tS v tλ should
have following form:
( , , )t t tS v t vλ λ= . (24)
11

3.2 Closed form solution
It is always nice to have an explicit formula for pricing the option. Fortunately,
Heston proposed a particular method for pricing European call option in stochastic
volatility models. In this thesis, the derivation of the closed form solution for
European call option in the Heston model will be briefly given, and more details
could be found in [5].
First, we can guess a solution based on the Black-Scholes formula:
( )1( , , , ) r T t
t t tC S v t T S P Ke P− −= − 2 . (25)
where jP could be interpreted as “adjusted” or “risk-neutralized” probability [9].
This probability also could be explained as follow:
( , , , ) [ ( ) ln( ) ( ) , ( ) ]j tP x v T K probability x T K x t x v t v= ≥ = = (26)
where ln( )tx S= ; j = 1, 2.
Next, we can plug our proposed solution into the Heston PDE. Then the following
equation must be satisfied:
2 2 22
2 2
1 1 ( ) ( )2 2
j j j j jj j
P P P P Pv v v r u v a b v 0jP
x x v v x v tρσ σ
∂ ∂ ∂ ∂ ∂ ∂+ + + + + − +
∂ ∂ ∂ ∂ ∂ ∂ ∂= (27)
where . 1 2 1 20.5, 0.5, , ,u u a b bκθ κ λ ρσ κ λ= = − = = + − = +
Since the probabilities are not calculable so far, we need to derive characteristic
functions. Let be a function of x and v at a later time T, denote a ( ( ), ( ))g x T v T
12

twice-differentiable function ( , , )jf x v t which represents a conditional expectation of
. By Ito’s Lemma, we obtain following expression: ( ( ), ( ))g x T v T
2 2 22
2 2
1 2
1 1( ( ) (2 2
( ) ( )
j j j j jj j
j jj j
f f f f fdf v v v r u v a b v dt) )j
j
fx x v v x v t
f fr u v dW a b v dW
x v
ρσ σ∂ ∂ ∂ ∂ ∂ ∂
= + + + + + − +∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂+ + + −
∂ ∂
. (28)
Since ( , , )jf x v t must be a martingale, we should have no term in above
equation:
dt
2 2 22
2 2
1 1 ( ) ( )2 2
j j j j jj j
f f f f f fv v v r u v a b v 0j
x x v v x v tρσ σ
∂ ∂ ∂ ∂ ∂ ∂+ + + + + − +
∂ ∂ ∂ ∂ ∂ ∂ ∂= . (29)
If { ( ) ln( )}( ( ), ( )) 1 x T Kg x T v T ≥= , the solution for above PDE is the conditional
probability at time t that ( ) ln( )x T K≥ . If ( ( ), ( )) exp( )g x T v T i xφ= , the solution is
the characteristic function. Furthermore, we guess that our solution has the following
form:
( , , ) exp ( ) ( )j t t j j tf x v t C T t D T t v i xφ⎡ ⎤= − + − +⎣ ⎦ . (30)
where and are unknown functions. (jC T t− ) )(jD T t−
Plug in our guess into the PDE, we can obtain the ODE as follows:
2 2 21 1 02 2
0
(0) 0 (0) 0
jj j j j j
jj
j j
DiD D u i b D
tC
r i aDt
C D
φ ρσφ σ φ
φ
∂⎧− + + + − + =⎪ ∂⎪
∂⎪+ + =⎨ ∂⎪= =⎪
⎪⎩
(31)
13

By solving above ODE, we can get the solution as follows:
2
2
2 2 2
1 2
( , , , ) exp ( , ) ( , )
1( , ) [( ) 2 ln(1
1( , ) ( )1
( ) (2 )
0.5, 0.5,
j
j
j
j t j j t
d
j j j
dj j
j d
j jj
j j
j j j
f x v T C T t D T t v i x
a gC T t r ir b i dg
b i d eD T tge
b i dg
b i d
d i b u i
u u a
τ
τ
τ
φ φ φ φ
τ φ φ ρσφ τσ
ρσφτ φ
σρσφρσφ
ρσφ σ φ φ
⎡ ⎤= − + − +⎣ ⎦
−= − = + − + −
−
− + −= − =
−− +
=− −
= − − −
= = − 1 2, , , tb b xκθ κ λ ρσ κ λ= = + − = + =
)]e
ln( ).S
(32)
As long as we have the characteristic functions, we can invert them to corresponding
probabilities: ln( )
0
( , , , )1 1( , , , ) Re( )2
i Kj t
j t
e f x v TP x v T K d
i
φ φφ
π φ
−∞
= + ∫ . (33)
In all, the closed form solution for a non dividend European call option is:
( )
1 2ln( )
0
2
( , , , )
( , , , )1 11,2 ( , , , ) Re( )2
( , , , ) exp ( , ) ( , )
1( , ) [( ) 2 ln(1
( , )
j
r T tt t t
i Kj t
j t
j t j j t
d
j j j
jj
C S v t T S P Ke P
e f x v Tfor j P x v T K d
i
f x v T C T t D T t v i x
a gC T t r ir b i dg
bD T t
φ
τ
φφ
π φ
φ φ φ φ
τ φ φ ρσφ τσ
ρστ φ
− −
−∞
= −
= = +
⎡ ⎤= − + − +⎣ ⎦
−= − = + − + −
−
−= − =
∫
)]e
2
2 2 2
1 2 1 2
1( )1
( ) (2 )
0.5, 0.5, , , , ln( ).
j
j
dj
d
j jj j j j
j j
t
i d ege
b i dg d i b u i
b i d
u u a b b x S
τ
τ
φσ
ρσφρσφ σ φ φ
ρσφ
κθ κ λ ρσ κ λ
+ −−
− += = − −
− −
= = − = = + − = + =
−
(34)
14

Chapter 4 Convexity
4.1 Introduction of Convexity
Definition of convexity:
Suppose that we have a continuous function f defined on an interval I. The function
f is convex on I if and only if:
( (1 ) ) ( ) (1 ) ( )f a b f a f bθ θ θ θ+ − ≤ + − (35)
for any [0,1]θ ∈ , and any ,a b I∈ .If f is twice differentiable, then it is convex
when '' 0f ≥
One example of convex function can be illustrated by the following figure which is
the price of European call option in the Black-Scholes model.
Figure 2 European call option price
15

From this figure, we can easily see that the price of European call option is a convex
function. Also the price of European call option increases as the stock price increases.
However, the option price is not likely to change linearly as the stock changes; instead
it behaves as some nonlinear function of the stock price. The convexity is the
measurement of how the option price changes as the stock price changes.
One might ask why convexity is an important property for the option price. The
reasons come from different aspects. One of them is that the convexity is useful for
comparing different options. We can view convexity as a measure of option risk. The
option with less convexity is less influenced by the variation of underlying asset price
than one with greater convexity. Also convexity is useful for risk management; if the
combined convexity is low, one would lose less even though fairly big price variation
happens.
4.2 Theorem for convexity
Recall the Heston PDE, equation (23) in Section 3.1. First, we should take a look at
Black-Scholes formula and corresponding Greeks. One can easily obtain the Greeks
and based on the Black-Scholes formula because of the homogeneity
properties of financial markets [11]. The expressions are shown as follows:
Δ Γ
2
( )1 2
1
21
2
2
2
1
2 1
( , , ) ( ( , , )) ( ( , , ))( , , ) ( ( , , ))
( , , ) ( ( , , ))
1( )2
1ln ( )( )2( , , )
( , , ) ( , , ) .
r T tK
K
K
xy
C t S v SN d t S v Ke N d t S vC t S v N d t S v
SC t S v N d t S v
S S
where N y e dx
S r v T tKd t S v
v T td t S v d t S v v T t
π
− −
−
−∞
= −∂
Δ = =∂
∂ ∂Γ = =
∂ ∂
=
+ + −=
−
= − −
∫ (36)
16

Based on the Heston model, the closed form solution of a non dividend European call
option is already given in Section 3.2. The solution which is similar to the
Black-Scholes formula is:
( )1 2( , , , ) r T t
t t tC S V t T S P Ke P− −= − .
By taking the appropriate derivatives or by exploiting homogeneity properties of
financial markets [11, 12], we can easily get:
1
21
2
ln( )1
10
( , , , )
( , , , )
( , , , )1 1( , , , ) Re( )2
ln( ).
t t
t t
i Kt
t
t
C S V t T PS
C S V t T PS S
e f x V Twhere P x V T K di
x S
φ φ φπ φ
∞ −
∂Δ = =
∂∂ ∂
Γ = =∂ ∂
= +
=
∫
(37)
The functions may be interpreted as adjusted or risk-neutralized
probability [9]. Since is the cumulative distribution function (in the variable of
1( , , , )tP x V T K
1P
ln( )K ) of the log-spot price after time T-t, staring at x for some drift μ , hence the
first order derivative of with respect to spot price should be the corresponding
density [12]. It has the following form:
1P
ln( )11 1
0
1( , , , ) Re( ( , , , ))
ln( ).
i Kt t
t
t
P p x V T K e f x V T dS S
where x S
φ φ φπ
∞−∂
Γ = = =∂
=
∫ (38)
Since the Greek Γ is a density function which is always positive, hence we can
conclude that the price of European call option in the Heston model is convex.
17

Theorem 4.1:
For the Heston model, if the contract function of an option is convex, then the option
price is convex in the underlying asset for all fix time before maturity.
Proof:
Denote the convex contract function of an option ( )SΦ , where and
. It is well known that any convex function could be approximated by a
convex piecewise-linear function. This approximation could be written as follow:
( ) 0SΦ ≥
max[0, ]S s∈
1( ) ( ) [ , ]i i i iS a S b when S s s +Φ = − ∈ (39)
It also could be illustrated by following figure:
Figure 3 Piecewise-linear approximation of a convex function
It is important to notice that is positive since ib ( ) 0SΦ ≥ and max[0, ]S s∈ . Further,
could be positive or negative. When is positive, we could consider in
the interval
ia ia ( )SΦ
1[ , ]i is s + as a European call option with strike price and weight .
When is negative, we could consider
ib ia
ia ( )SΦ in the interval as a 1[ , ]i is s +
18

European put option with strike price and weight ib ia− . Hence, we could consider
as a non negative weight combination of European call and put options with
corresponding strike price. The price of
( )SΦ
( )SΦ for any fix time before maturity is the
non negative weight combination of corresponding price of European calls and puts.
From expression (38), we already verified that the price of European call option for
any fix time before maturity in the Heston model is convex. From Lemma 4.1, it is
also true that if the price of European call option is convex, the price of European put
option is convex. It is also well known that the non negative weight combination of
convex is also convex.
Finally, we can conclude that the option price is convex in the underlying asset for all
fix time before maturity if the contract function is convex.
Lemma 4.1:
If the price of European call option is convex, the price of identical1 European put
option is convex.
Proof:
It is well known that there is a relation called call-put parity which is described as
follow:
( )( , ) ( , )r T tC S t K e P S t S− −+ ∗ = + (40)
where and are the price of European call and put option with
identical strike price and maturity time,
( , )C S t ( , )P S t
K is strike price and is the value of the
underlying asset.
S
1 Identical strike price and maturity time in same underlying asset
19

From (40), we have:
( )( , ) ( , ) r T tP S t C S t K e S− −= + ∗ − (41)
Since and are convex, ( , )C S t S− ( )r T tK e− −∗ is constant. Thus, the sum of these
three terms is convex.
It shows that the price of European put option is convex function, if the price of
European call option is convex function.
20

Chapter 5 Numerical methods
5.1 Introduction
The numerical analysis method is the most common method for dealing with partial
differential equation. There are many different numerical analysis methods, such as:
finite difference method, finite element method, finite volume method and so on. In
this paper, I decide to use the finite difference method.
5.1.1 Main idea
The main idea for the finite difference method is that one could apply discretisation of
partial differential equation on a grid in the finite domain. This method was fully
developed in the 1960s. It became popular because it is relatively easy to program;
and it provides considerably accuracy which depends on the choice of grid density
and time step. Furthermore, discretisation can be performed as uniform grid,
non-uniform grid and random grid. The uniform grid which is used in this thesis is the
common choice. The following graph shows main idea of the method.
Figure 4 Discretisation in the finite domain
21

The value of each small mesh point depends on several others around it. All the values
inside the domain are unknown, and the values on the boundary are deterministic.
5.1.2 Detail
One could use different forms, such as forward difference, backward difference and
central difference, to substitute the derivatives in PDE, and obtain a numbers of
equations which have the same number of unknown variables.
forward difference ( ) ( )F F x x F xx x
∂ + Δ −=
∂ Δ
backward difference ( ) ( )F F x F x xx x
∂ − − Δ=
∂ Δ
central difference ( ) (2
)F F x x F x xx x
∂ + Δ − −Δ=
∂ Δ
Table 2 Forms of derivative substitution
If the PDE has the continuous derivative on time space, one may use similar strategy
to discrete it, then Euler forward, Euler backward and Crank-Nicholson method might
be chosen here.
Euler forward 1
0t t
tF F AFt
−−+ =
Δ
Euler backward 11 0
t ttF F AF
t
−−−
+ =Δ
Crank-Nicholson 111 ( )
2
t tt tF F A F F
t
−−− 0+ + =
Δ
Table 3 Methods for solving ODE
22

where represents the equations after the difference substitution in domain.
Since the order of accuracy is 2, Crank-Nicholson method is recommended.
Respectively Euler backward has order of accuracy 1, Euler forward depends on
strictly stable condition. Finally one could iteratively compute the numerical solution
from one side of time to another; the value of starting time should be deterministic.
tAF
Boundary condition is also one important aspect for the finite difference method. It
represents the value or the function lying on the boundary of the domain. Concretely,
there are three kinds of boundary condition:
Dirichlet boundary condition ( )F u∂Ω =
Neumann boundary condition ( )F un
∂ ∂Ω=
∂
Cauchy boundary condition ( )( ) FaF b un
∂ ∂Ω∂Ω + =
∂
Table 4 Boundary conditions
∂Ω represents the boundary of domain, is a deterministic function or value,
and are some certain numbers.
u a
b
In the Heston PDE, there are terms of second order derivative and cross derivative.
They could be approximated by following expressions:
2
2 2
1 ( ( ) 2 ( ) ( ))F F x x F x F x xx x
∂= + Δ − + −
∂ ΔΔ . (42)
2 1 ( ( , ) ( , ) ( , ) ( , ))F F x x y y F x y y F x x y F x yx y x y∂
= + Δ + Δ − + Δ − + Δ +∂ ∂ Δ Δ
. (43)
23

5.2 Implementation
We will use Matlab in the implementation part of this thesis. Both the finite difference
method and the close form solution are implemented. More details will be discussed
in the following sections.
5.2.1 Closed form solution
The formula (34) looks complicated, but the only problem is that the integer cannot be
calculated directly. Practically, it is fairly easy to calculate with Matlab. Using certain
command “quadl” which involves recursive adaptive Lobatto quadrature, the integer
could be approximated within an acceptable error.
5.2.2 Finite difference method
Boundary conditions
In the Heston PDE, since we have derivatives with respect to time, stock price and
volatility, we need the boundary conditions on each direction. Based on the inequality
which is obtained in Section 2.3.2, we should notice that if 21 02
κθ σ− ≤ is fulfilled,
volatility process will never reach zero. However, it is very important to have all the
boundary conditions for the finite difference method. We will use some “artificial”
boundary conditions which are reasonable in our case. The consideration of boundary
conditions is also based on [1, 5, 10]
(a) Time direction: The European call option price is the payoff of the contract when time reaches
maturity. This is also the corresponding boundary condition claimed in [5].
( , , ) max( ,0)u T S v S K= − .
24

(b) Stock price direction: If the stock price is zero, we also keep the choice in [5]:
( ,0, ) 0u t v = .
A Neumann boundary condition is proposed in [5] for the maximum stock price:
max( , , ) 1u t S vS
∂=
∂.
We also considered other choices, such as the Black-Scholes formula in [1]. But the
results from tests are not nice for those choices. Hence we use the values from the
closed form solution with corresponding stock price and volatility. (c) Volatility direction: If volatility is zero, the boundary condition is:
( )( , ,0) max( ,0)r T tu t S S Ke− −= − .
It is much simpler comparing with the corresponding one proposed in [5].
( , ,0) ( , ,0) ( , ,0) ( , ,0) 0u t S u t SrS ru t S u t SS v
κθ∂ ∂+ − +
∂ ∂= .
If volatility reaches maximum, we use the same one as in [5]. It is intuitive to think
that the option price is same as the spot price:
max( , , )u t S v S= .
25
Concrete value for the parameters:
After setting the boundary conditions, we should decide the value for some
parameters, such as: maximum of stock price, maximum of volatility. In this thesis,
we use four times of the strike price as the maximum value of stock price. Since there
is no regulation for appropriate maximum volatility, the value of maximum volatility
is determined by running tests based on the closed form solution.
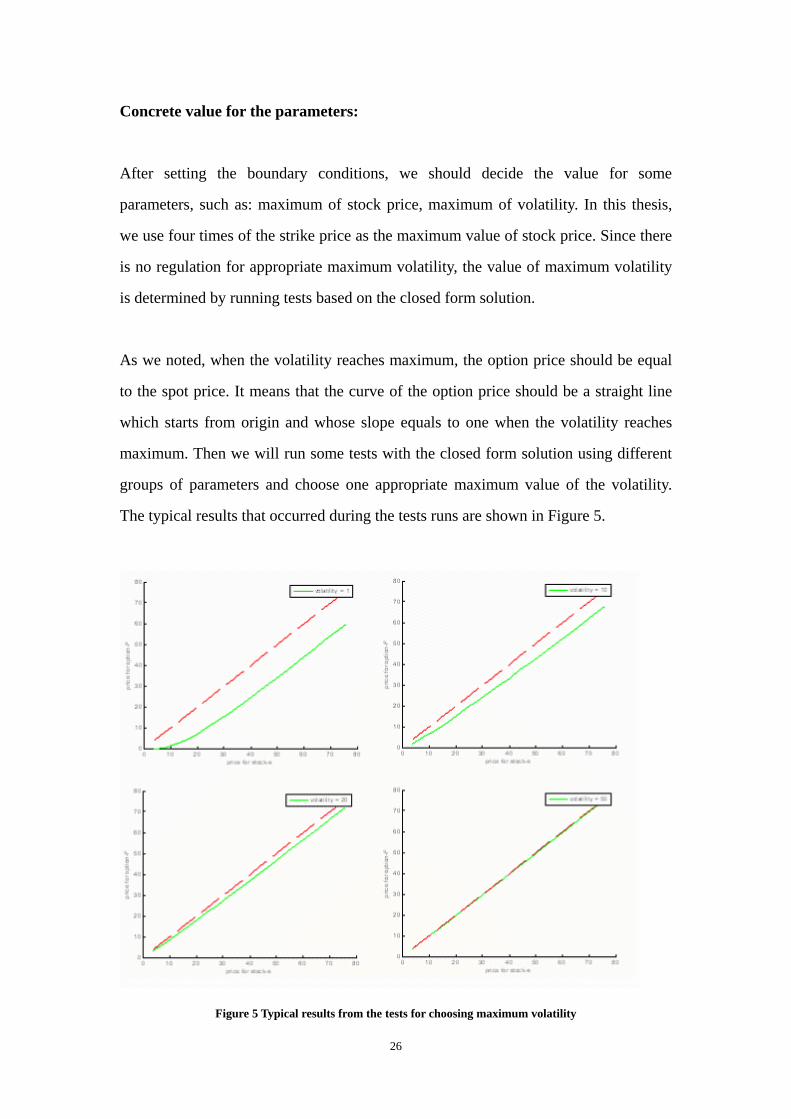
As we noted, when the volatility reaches maximum, the option price should be equal
to the spot price. It means that the curve of the option price should be a straight line
which starts from origin and whose slope equals to one when the volatility reaches
maximum. Then we will run some tests with the closed form solution using different
groups of parameters and choose one appropriate maximum value of the volatility.
The typical results that occurred during the tests runs are shown in Figure 5.
Figure 5 Typical results from the tests for choosing maximum volatility
26

From the tests, we can conclude that when volatility is equal to 40 or bigger the curve
of option price satisfies the requirement. Hence the maximum volatility for the finite
difference method will be set to 40.
Iteration Process
As mentioned in Section 5.1.2, central difference is applied for approximating the first
derivative with respect to price and volatility; formula (42) and (43) are given for
approximating the second derivative and the cross derivative with respect to
underlying asset or volatility; the Crank-Nicholson scheme is applied for solving the
ordinary differential equation. After necessary substitutions, a part of the Heston PDE
becomes as follow:
2 2 22 2
2 2
1 1, 2 1, 3 , 1 4 , 1 5 1, 1 6 ,
1 1( ( ) )2 2t t t t t t t
j k j k j k j k j k j k
u u u urS v S v v S v rus v s v
a u a u a u a u a u a u
κ θ λ σ σρ
+ − + − + +
∂ ∂ ∂ ∂+ − − + + + −
∂ ∂ ∂ ∂ ∂= + + + + +
us v∂∂ . (44)
where
21
22
2
3
2
4
5
22
6
1 12 21 12 2
( )2 2( )
2 2
2
a Nr MN v MN
a MN v Nr
M v M v Ma Mv v
M M v M vav v
a MN
Ma MN r MN vv
σρ
κ θ λ σ Nσρ
σ κ θ λ
σρ
σσρ
= + Δ −
= Δ −
− Δ − Δ= +
Δ Δ− Δ − Δ
= −Δ Δ
=
= − − Δ −
−
Δ
M and N are the number of how many steps of the price and volatility are divided
respectively. The index of price and volatility is represented by j and k respectively.
Expression (44) also could be expressed as matrix form:
,1M NAU b× +
27

max max
m
4 1, 0
6 3
4 6
3 1, 5 2,
4 2, 03
4 6
1 5
3 2,1
5
1
2
2
2
1 23 1
2,3 1
1
2
3
v
v v
v
v
A AA A
where AA
M N M NA A
a u
a aa a
a u a uAa ua
a a
a aa ua
A and baa
aa
A
a
=
=
⎛ ⎞⎜ ⎟⋅⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅⎜ ⎟
⋅ ⋅⎜ ⎟⎜ ⎟ × ×⎝ ⎠
⋅⎛ ⎞⎜ ⎟ ⋅⋅⎜ ⎟
+⎜ ⎟= ⋅ ⋅ ⋅⎜ ⎟
⋅ ⋅⎜ ⎟⎜ ⎟ ⋅⎝ ⎠
⋅⎛ ⎞⎜ ⎟⋅⎜ ⎟⎜ ⎟= =⋅ ⋅⎜ ⎟
⋅⎜ ⎟⎜ ⎟⎝ ⎠⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟= ⋅⎜ ⎟
⋅⎜ ⎟⎜ ⎟⎝ ⎠
ax max
max max
max max
max max
max max max max
5 3,
1 ,1 5 ,2 4 , 0
1 ,2 5 ,3
1 ,3 5 ,4
1 , 3 , 5 ,
v
s s M v
s s
s s
s N M v s v
N
N
a u
a u a u a u
a u a u
a u a u
a u a u a u
=
⎛ ⎞ ⎫⎜ ⎟ ⎪
⎪⎜ ⎟⎬⎜ ⎟⎪⎜ ⎟⎪⎜ ⎟ ⎭
⎜ ⎟⎫⎜ ⎟⎪⎜ ⎟ ⎪⎜ ⎟ ⎬
⎜ ⎟ ⎪⎜ ⎟+ ⎪⎭⎜ ⎟
⋅⎜ ⎟ ⎫⎜ ⎟ ⎪⋅ ⎬⎜ ⎟
⎪⋅⎜ ⎟ ⎭⎜ ⎟+ +⎜ ⎟ ⎫⎜ ⎟ ⎪+⎜ ⎟ ⎪⎜ ⎟+ ⎪⎜ ⎟ ⎬
⋅⎜ ⎟ ⎪⎜ ⎟ ⎪⋅⎜ ⎟⎜ ⎟+ + ⎭⎝ ⎠
M N
N
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪ ×⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎪ ⎪⎭
With the matrix form substituted in and the Crank-Nicholson scheme applied, the
Heston PDE becomes:
11 1
1 1
1 1( ) ( )2 2
2 2( ) ( ) (
i ii i i i
i i
u u Au Au b bt
A I u A I u b bt t
−− − 0
)i i− −
−+ + + + =
Δ
⇒ − = − + − +Δ Δ
. (45)
where i represents the index of time direction, tΔ is the time step, I is a
M N by M N× − − × identity matrix.
Subsequently, the option price will be calculated iteratively from time maturity to zero
time. Since A is a matrix with many zero elements, the LU factorization will be
used for solving the linear system.
28

5.3 Results In this section, the results obtained from the closed form solution and the finite
difference method will be discussed and compared; convexity will also be discussed
based on the results.
5.3.1 Results from the closed form solution
In this section, I will present the closed form solution graphically. Furthermore,
inappropriate parameter choice will also be given and discussed. The convexity based
on the closed form solution will be discussed at last.
Results and parameter
First, we choose two groups of parameters based on [10].
max
max
20, 80, 0.1, 0.1, 0.04, 0, 0.5, 2, 220, 80, 0.2, 0.5, 0.02, 0.1, 0.3, 3, 2
K S r TK S r T
ρ θ λ σ κρ θ λ σ κ
= = = = − = = = = == = = = − = = = = =
Figure 6 Results from the close form solution
The left hand side of Figure 6 is the result from the first group parameter, the right
hand side of the figure is the result from second one. The pictures look nice and the
curve of the option price is convex for difference volatility value.
Next step, we try another group of parameters. It is almost the same with first one; the
only difference is negative value for the term κ .The results are shown in Figure 7.
29

max20, 80, 0.1, 0.1, 0.04, 0, 0.5, 2, 2K S r Tρ θ λ σ κ= = = = − = = = = − =
Figure 7 Results from the close form solution for negative κ
The left hand side of Figure 7 is the result when volatility equals to 2; the right hand
side is the result when volatility equals to 0.1. Now we can clearly see that when
volatility is 2, the price almost reaches the upper boundary. When volatility equals to
0.1, the price of option has negative value which is absolutely wrong. Those
performances in Figure 6 are unreasonable. It is probably because of the negative κ .
To verify my thought, we do tests using the first group of parameters. The results with
volatility equals to 0.1 and 2 are shown in Figure 8:
Figure 8 Results for the first two groups of parameters when volatility = 0.1 and 2
From Figure 8, we can see that the performances of option price when volatility
equals to 0.1 are normal. We argue that the unreasonable results are due to the
negative . κ
30

Now we analyse the unreasonable choice of κ from theoretical point of view. As
explained in Section 2.3.2, our volatility process has the form as follow:
2( )t t tdv v dt v dWκ θ σ= − + .
The artificial process 2
2
4tV σ= tB , where tB is a n-dimensional Bessel process, has
the form as follow:
2
4t tdV ndt V dWσ σ= + t .
If 2
4n κθσ
= is fulfilled, those two processes has similar performance near zero. First,
we have positive 2σ ; θ is also positive since it is long term mean for volatility
which is always positive. Hence when κ is negative, “n” will become negative
which is unreasonable. Based on above analysis, any negative value for the term κ
is not considered in other tests.
At last, we run the tests with many groups of appropriate parameters. The results are
similar as Figure 6. We can say that the results shown in Figure 6 are the typical
results. In all, the option price is convex based on the closed form solution with
appropriate parameter.
Convexity based on closed form solution
Above, we can graphically see that the price for European call option is convex. On
the other hand, we can show the convexity by illustrating the Γ .
Because, , the second order derivative of European call option with respect to spot
price is a density function, we can conclude that the Greek
Γ
Γ based on the closed
31

form solution for the Heston model is always positive. We can also obtain numerical
typical results for the density function of log-spot price which is shown in Figure 9:
Figure 9 Typical result of density function of log-spot price with different volatility
The numerical values are positive. Consequently, we can say that the convexity for
European call option based on the closed form solution for the Heston model is
preserved.
5.3.2 Results from the finite difference method
In the implementation part, we set the number of discretisation for the price and the
volatility direction as 20, time maturity is 2, time step is 0.1, and maximum volatility
is always 40 as claimed in Section 5.2.2. Other parameters, including , , , , , rρ θ σ κ λ ,
will have different combinations. We choose many groups of parameters, and the
typical results that occurred during the tests are shown in Figure 10:
32

max20, 80, 0.1, 0.1, 0.04, 0, 0.5, 2K S r ρ θ λ σ κ= = = = − = = = =
Figure 10 Typical results from FDM for different groups of parameters
The left hand side of Figure 10 is the picture with different volatilities. To illustrate
the trend of the option price clearly, we only show the option price with four numbers
of volatility. We could see that the curve of the option price is pulling up toward the
boundary option price as long as the volatility increasing, also the option price is
convex at least for those four volatility values. The right hand side of Figure 10 shows
more precisely. We can conclude that the option price is convex for any volatility
value between the interval [0, 40].
From the tests with different groups of parameters, it seems that the parameters
,r ρ , θ and σ do not effect the results so much, we could always get the typical
results as Figure 10. Also it is important to notice that:
(a) We did not change the sign of θ which is the long term mean for volatility. Since
there is no negative volatility, θ couldn’t be negative.
(b) The termλ always equals to 0.
There is no λ term in the Black-Scholes formula, because the risk is completely
eliminated there. However the volatility is not tradable in the Heston’s model, one
cannot make a perfect portfolio which is risk-free. Thus, we have a λ term which is
the market price of volatility risk in our model.
33

Next we have two groups of parameters with non-zero λ . The results obtained from
the parameters below are shown in Figure 11.
max20, 80, 0.1, 0.1, 0.04, 0.2, 0.5, 2K S r ρ θ λ σ κ= = = = − = = = =
Figure 11 Results from λ = 0.2
We can see that the result after adding market price of volatility risk is still nice, and
the option price is convex. We try larger market price of risk, the results obtained
from the parameters below are shown in Figure 12.
max20, 80, 0.1, 0.1, 0.04, 1, 0.5, 2K S r ρ θ λ σ κ= = = = − = = = =
Figure 12 Results from λ = 1
The result is still nice, convexity is preserved. There is slightly difference between
Figure 11 and Figure 12, but it is barely visible. Hence we give the numerical
comparison in Table 5.
34

Spot price
Option price with λ = 0.2, volatility = 2
Option price with λ = 1, volatility = 2
4 0.26642 0.12408 8 1.3578 0.92477 12 3.146 2.4526 16 5.5315 4.6661 20 8.4403 7.5134 24 11.66 10.726 28 15.073 14.157 32 18.614 17.73 36 22.246 21.4 40 25.944 25.137 44 29.691 28.923 48 33.477 32.747 52 37.292 36.6 56 41.131 40.474 60 44.989 44.367 64 48.864 48.274 68 52.752 52.192 72 56.652 56.12 76 60.561 60.056
Table 5 Typical results of numerical comparison for the option price with different λ
From Table 5, we can clearly see that all the option price with larger λ when
volatility equals to 2 is smaller to the one with smaller λ . This is the typical result
during the tests. We conclude that the option price decreases when the market price of
volatility risk increases. It also accords with the real situation.
The result for every group of parameters is nice and as expected. Based on all the
results obtained from the finite difference method, we can conclude that the price for
European call option is convex and increases when the volatility increases.
5.3.3 Comparison between the results of the previous sections
In order to test the accuracy of the finite difference method, we compare the results
obtained from the finite difference method and the closed form solution. The
comparisons will be illustrated graphically and numerically, also base on several
groups of parameters. Results from the first group of parameters are shown in Figure
13:
35

max20, 80, 0.1, 0.1, 0.04, 0, 0.5, 2K S r ρ θ λ σ κ= = = = − = = = =
Figure 13 Comparison of FDM and closed form solution
We can see that the results obtained from both methods are very close. For further
comparison to see the difference of results, a statistical concept which is called the
standard error regression (SER) is applied. We fix the volatility; calculate SER by
following expression:
2( ( , ) ( , ))
1
ni i
CFS t FDM ti
C S v C S vSER
n
−=
−
∑.
where and represent the option price obtained from the
closed form solution and the finite difference method respectively when spot price is
and fix volatility is . We calculate SER when volatility equals to 2, 4, 10 and 30
which are shown in Table 6.
( , )iCFS tC S v ( , )i
FDM tC S v
itS v
Volatility 2 4 10 30
SER 0.135 0.045 0.002 0.075 Table 6 Numerical comparison between FDM and closed form solution
In general, the smaller the SER value, the smaller the difference between FDM and
closed form solution. From Table 6, we can see that the differences between these two
36

methods are slight. This slight difference is typical result during all the tests. It
indicates that the finite difference method with Crank-Nicholson scheme works well
and our boundary condition choices are appropriate.
37

Chapter 6 Conclusion
In this article we show that the option price is convex in the underlying asset, for all
fixed times, in the case of convex contract functions for the Heston stochastic
volatility model, see Chapter 4. In chapter 2 we discuss different volatility models and
in Chapter 3 we derive the pricing PDE in the Heston model. We also illustrate the
results using numerical methods, see Chapter 5.
38

Reference:
[1] F. Black and M. Scholes, 1973. “The Valuation of Options and Corporate
Liabilities,” Journal of Political Economy. 81,637-654
[2] B. Dupire, 1994. “Pricing With a Smile,” Risk, Vol 7 (1), 18-20
[3] J. C. Hull and A. White, 1987. “The Pricing of Options on Assets with Stochastic
Volatilities,” Journal of Finance, 42, 281-300.
[4] L. O. Scott, 1987. “Option Pricing When the Variance Changes Randomly:
Theory, Estimation and an Application,” Journal of Financial and Quantitative
Analysis 22/22, 419-438
[5] S. L. Heston, 1993. “A Closed-form Solution for Options with Stochastic
Volatility with Applications to Bond and Currency Options,” The Review of Financial
Studies, 6(2), 327-343
[6] R. Riccardo, 1999. Book Title: “Volatility and Correlation: The perfect Hedge and
the Fox”
[7] J. C. Cox, E. Ingersoll and S. A. Ross, 1985. “A Theory of the Term Structure of
Interest Rates,” Econometrica, 53, 385-408
[8] L. C. G. Rogers and D. Williams, 2000. “Diffusion, Markov Processes, and
Martingales” –Volume two: Ito calculus. Cambridge University Press.
[9] J. C. Cox and Ross S. A, 1976. “ The Valuation of Options for Alternative
Stochastic Processes,” Journal of Financial Economics, 3, 145-166
39

[10] T. Kluge, 2002. “Pricing derivatives in stochastic volatility model using the finite
difference method”
[11] O. Reiss and U. Wystup, 2001. “Computing Option Price Sensitivities Using
Homogeneity,” Journal of Derivatives 9(2): 41-53
[12] http://www.xplore-stat.de/tutorials/stfhtmlnode47.html
[13] R. Sheppard. “Pricing Equity Derivatives under Stochastic Volatility”
[14] J. Hull and A. White 1996 “Hull and White on Derivatives: A Compilation of
Articles.” Risk Publication, ISBN: 1899332456
[15] Y. Z. Bergman, B. D. Grundy and Z. Wiener 1996 “General properties of option
prices” J. Finance 51, 1573-1610
[16] G. Winkler, 2001. “Option Valuation in Heston’s Stochastic Volatility Model
using Finite Element Methods.”
[17] E. Ekstron and J. Tysk, 2006. “Convexity preserving Jump Diffusion Models for
Option Pricing.”
40