controladores difusos lógica difusa - seamplex · reglas inferencia defuzzi cation aplicaciones...
TRANSCRIPT

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Controladores difusosProyecto Integrador de la carrera de Ingeniería Nuclear
jeremy theler
Laboratorio de Cavitación y Biotecnología
Instituto Balseiro
Universidad Nacional de Cuyo
Comisión Nacional de Energía Atómica
05/03/2007

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Outline de la charla�All traditional logic
habitually assumes that
precise symbols are being
employed. It is therefore
not applicable to this
terrestrial life, but only
to an imaginated
celestial existence.�
Bertrand Russell, 1923
Lógica difusaVariables lingüísticasConjuntos difusosOperaciones difusasRelaciones difusas
Estructura de un controlador difusoEsquemas de control estándarEstructura de un controlador difusoInterfaz real�difusoBase de reglas lingüísticasMecanismo de inferenciaInterfaz difuso�real
Diseño de controladoresCinética puntualTanque mezcladorRueda loca
Trabajos futuros

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Motivación
A menudo nos encontramos con conceptos algo subjetivos
I . . . un número x mucho mayor que la unidad
I . . . una mujer hermosa
pero que son realmente importantes, por ejemplo
I . . . para poder resolver un problema de ingeniería
I . . . para lograr la felicidad
La teoría de lógica difusa es una herramienta con la cual atacarmatemáticamente problemas lingüísticos y subjetivos,originalmente introducida por Zadeh en 1965.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Motivación
A menudo nos encontramos con conceptos algo subjetivos
I . . . un número x mucho mayor que la unidad
I . . . una mujer hermosa
pero que son realmente importantes, por ejemplo
I . . . para poder resolver un problema de ingeniería
I . . . para lograr la felicidad
La teoría de lógica difusa es una herramienta con la cual atacarmatemáticamente problemas lingüísticos y subjetivos,originalmente introducida por Zadeh en 1965.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Variables lingüísticas
½Atención! Probabilidad de tautología en puerta
De�nición (Variable lingüística)
Dada una variable real x de�nida en un universo de discurso U ,llamamos variable lingüística x al concepto asociado a x quesólo puede tomar valores lingüísticos, a de�nir a continuación.
De�nición (Valor lingüístico)
Sea x una variable lingüística. El conjunto de valores arbitrariosque x puede tomar es
V = {vi : i = 1, 2, . . . , N}
y cada uno de los elementos de V se llama valor lingüístico.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Ejemplos de variables lingüísticas
Ejemplo
La variable lingüística p =�presión� de�nida sobre el universo dediscurso P = [0 Pa,∞) puede tomar los valores lingüísticos
p = {baja, normal, alta}
Ejemplo
Sea h ∈ [0, hmax] la altura del nivel de agua líquida en el circuitosecundario del generador de vapor de un reactor nuclear. Lavariable lingüística �altura� de�nida sobre h puede valer
altura = {inaceptablemente baja, peligrosamente baja,
baja, normal, alta, peligrosamente alta
inaceptablemente alta}

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Conjuntos difusos
De�nición (Función de membresía)
La función µv(x) : U 7→ [0, 1] que describe la certeza de que xpueda ser clasi�cada lingüísticamente por v se llama función demembresía.
De�nición (Conjunto difuso)
De�nimos el conjunto difuso Vu como
Vu ={(x, µx(x)
): x ∈ U
}esto es, un conjunto clásico cuyos elementos son pares{x, µx(x)} que representan la certeza de que el valor real xpueda ser clasi�cado lingüísticamente como x.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Importante aclaraciónLo que a uno primero se le ocurre, o simple leyenda urbana. . .
Los conjuntos difusos no tienen nada que ver conuna distribución de probabilidad. Una función de membresía
caracteriza la certeza de que el contenido de la variabletradicional u pueda ser clasi�cada lingüísticamente como v, y nohay ninguna naturaleza probabilística detrás de este concepto, niestamos lidiando con fenómenos aleatorios.
RecordarSe trata de cuanti�car matemáticamante ideas naturalmenteimprecisas y subjetivas pero de�nitivamente no aleatorias.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Extensión de los conjuntos clásicosEjemplo de un conjunto difuso que extiende un conjuntos clásicos
El conjunto clásico C = [0, 1] puede ser escrito como conjuntodifuso. En efecto, sea
µC(x) =
{1 si 0 ≤ x ≤ 1,0 de otra manera.
1
1
2
0x
µC
entonces el conjunto difuso
F = {(x, µC(x)) : x ∈ R}
coincide con el conjunto clásico C.

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Ejemplo de un conjunto difuso: luz azulCitado de Fontanini (1988)
Podríamos de�nir el conjunto difuso �luz azul� en el universo Λde las longitudes de onda visibles, cuya función de pertenenciapodría ser la siguiente función arbitraria
0600400 450 500 550 650 650
1
0.5
λ[nm]
µ(λ)

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Ejemplo � Presión en Atucha I
La presión nominal a la salida del generador de vapor de laCentral Nuclear Atucha I es p = 4,5MPa. Las funciones demembresía de los valores lingüísticos �baja�, �normal� y �alta�podría ser
4.4 4.5 4.6
1
4.3p
[MPa]4.70
µ(p)
normal
bajaalta

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Último ejemplo � Edades
Conjuntos difusos�subjetivos y arbitrarios�para clasi�car a unapersona según su edad
0
µ
0
0.2
0.4
0.6
0.8
1
20 40 60
jóvenhasta ahí nomás
vieja
edad [años]10080

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Último ejemplo � Edades
Conjuntos difusos�subjetivos y arbitrarios�para clasi�car a unapersona según su edad
0
µ
0
0.2
0.4
0.6
0.8
1
20 40 60
hasta ahí nomásvieja
edad [años]10080
jóven

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Operaciones sobre conjuntos difusosOperador unión
De�nición (Unión)
La unión F ∪G de los conjuntos F y G es el conjunto difusocuya función de membresía µF∪G(x) es
µF∪G(x) = max {µF (x), µG(x)}= µF (x) ∨ µG(x)
µF ∨ µG
µG
µF
µ
x
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
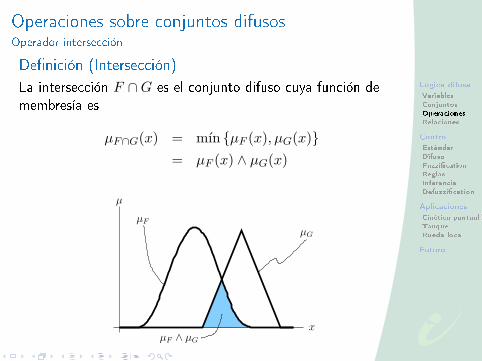
Operaciones sobre conjuntos difusosOperador intersección
De�nición (Intersección)
La intersección F ∩G es el conjunto difuso cuya función demembresía es
µF∩G(x) = mın {µF (x), µG(x)}= µF (x) ∧ µG(x)
µF
µ
µG
xµF ∧ µG

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Relaciones difusas
De�niciónUna relación difusa binaria R está caracterizada por una funciónde membresía µR(x, y) que da la certeza de que el par (x, y) searepresentado por la relación R.
Ejemplo (Zadeh, 1965)
La relación denotada por x� y con x, y ∈ R puede serdescripta por un conjunto difuso A ∈ R2 cuya función demembresía µA(x, y) podría tomar los siguientes (y subjetivos)valores representativos
µA(10, 5) = 0µA(100, 10) = 0,7µA(100, 1) = 1

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Composición difusaExtensión al campo difuso de las funciones reales
De�nición (Composición sup-star)
Dados dos conjuntos difusos A ∈ X, B ∈ Y y una relacióndifusa binaria R ∈ X × Y , la función de membresía del conjuntodifuso B es
µB(y) = maxx {mın [µA(x), µR(x, y)]}= ∨x [µA(x) ∧ µR(x, y)]
fórmula que se conoce como composición sup-star o max-min.En el campo de los conjuntos difusos escribimos
B = A ◦R
Intento de justi�cación

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Composición difusaExtensión al campo difuso de las funciones reales
De�nición (Composición sup-star)
Dados dos conjuntos difusos A ∈ X, B ∈ Y y una relacióndifusa binaria R ∈ X × Y , la función de membresía del conjuntodifuso B es
µB(y) = maxx {mın [µA(x), µR(x, y)]}= ∨x [µA(x) ∧ µR(x, y)]
fórmula que se conoce como composición sup-star o max-min.En el campo de los conjuntos difusos escribimos
B = A ◦R
Intento de justi�cación

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Esquemas de control estándar
De�nición (SISO)
Una planta con una entrada y una salida se llama sistema SISO.
De�nición (MIMO)
Una planta con más de una entrada y más de una salida llamasistema MIMO.
Lazo abierto
r(t) u(t)controlador planta
y(t)
u(t)−
y(t)controlador planta
y′(t)
conversor
r(t) m(t)
Lazo cerrado

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Esquemas de control estándarControladores digitales
−ek
DAC ZOH
rk u∗(t) y(t)uk
yk
digital
controlador
continua
planta
ADC
señal original
reconstruccióncon ZOH
aproximaciónωT2
(ωT )/2

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Estructura interna de un controlador difuso
lingüísticasreglas
inferenciamecanismo de
fuzzi�cation
defuzzi�cation
controlador
operad
or
r(t)
y(t)
m(t)planta
y(t)u(t)
1. interfaz real�difusa
2. base de reglas lingüísticas
3. mecanismo de inferencia
4. interfaz difusa�real

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Interfaz fuzzi�cation real�difuso
lingüísticasreglas
inferenciamecanismo de
fuzzi�cation
defuzzi�cation
controlador
operad
or
r(t)
y(t)
m(t)planta
y(t)u(t)
1. interfaz real�difusa
2. base de reglas lingüísticas
3. mecanismo de inferencia
4. interfaz difusa�real
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
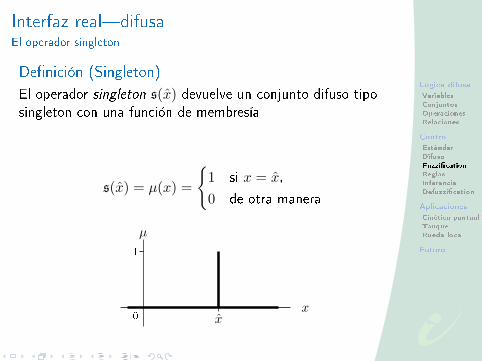
Interfaz real�difusaEl operador singleton
De�nición (Singleton)
El operador singleton s(x) devuelve un conjunto difuso tiposingleton con una función de membresía
s(x) = µ(x) =
{1 si x = x,
0 de otra manera
xx
1
0
µ
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
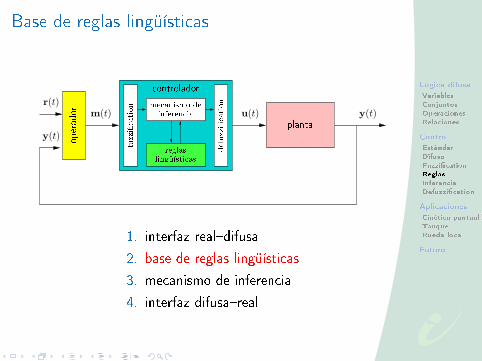
Base de reglas lingüísticas
lingüísticasreglas
inferenciamecanismo de
fuzzi�cation
defuzzi�cation
controlador
operad
or
r(t)
y(t)
m(t)planta
y(t)u(t)
1. interfaz real�difusa
2. base de reglas lingüísticas
3. mecanismo de inferencia
4. interfaz difusa�real

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Reglas lingüísticascomo forma de cuanti�car conocimiento
I Reglas causalísticas de la forma IF - THENI Tácitamente utilizamos ciertos conocimientos o intuiciones
que se pueden escribir como reglas lingüísticas
• IF tengo hambre THEN como un chorizo• IF la mina es muy linda THENme olvido e intentocon otra
• IF estoy llegando a la esquina THEN piso un pocoel freno
• IF la potencia es baja THEN saco un poco las barrasde control
• IF la temperatura del refrigerante es alta THEN hagoun scram
• IF el nivel del presurizador es alto y aumenta la presión enla contención THEN la válvula de alivio estáabierta (TMI)

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Semántica de las reglas lingüísticasForma general
IF m1 ISA︸ ︷︷ ︸cláusula 1
AND · · · AND mn ISB︸ ︷︷ ︸cláusula n︸ ︷︷ ︸
premisa
THEN ui ISC︸ ︷︷ ︸consecuencia
Equivalencias lógicas
IF x ISA1 OR x ISA2 THEN y ISB ≡IF x ISA1 THEN y ISB
IF x ISA2 THEN y ISB
IF x ISA THEN y ISB AND z ISC ≡IF x ISA THEN y ISB
IF x ISA THEN z ISC

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Semántica de las reglas lingüísticasForma general
IF m1 ISA︸ ︷︷ ︸cláusula 1
AND · · · AND mn ISB︸ ︷︷ ︸cláusula n︸ ︷︷ ︸
premisa
THEN ui ISC︸ ︷︷ ︸consecuencia
Equivalencias lógicas
IF x ISA1 OR x ISA2 THEN y ISB ≡IF x ISA1 THEN y ISB
IF x ISA2 THEN y ISB
IF x ISA THEN y ISB AND z ISC ≡IF x ISA THEN y ISB
IF x ISA THEN z ISC
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Sobre el origen de las reglas
Las reglas lingüísticas pueden provenir básicamente de. . .
I la experiencia y conocimiento del diseñador sobre ladinámica y la ingeniería de control de la planta
I la observación de un operador humano en acción o de larecabación de la información necesaria de otras manerastales como la indagación lisa y llana
I un modelo matemático difuso
I métodos de aprendizaje basados en redes neuronales

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Sobre el origen de las reglas
Las reglas lingüísticas pueden provenir básicamente de. . .
I la experiencia y conocimiento del diseñador sobre ladinámica y la ingeniería de control de la planta
I la observación de un operador humano en acción o de larecabación de la información necesaria de otras manerastales como la indagación lisa y llana
I un modelo matemático difuso
I métodos de aprendizaje basados en redes neuronales
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Sobre el origen de las reglas
Las reglas lingüísticas pueden provenir básicamente de. . .
I la experiencia y conocimiento del diseñador sobre ladinámica y la ingeniería de control de la planta
I la observación de un operador humano en acción o de larecabación de la información necesaria de otras manerastales como la indagación lisa y llana
I un modelo matemático difuso
I métodos de aprendizaje basados en redes neuronales

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Sobre el origen de las reglas
Las reglas lingüísticas pueden provenir básicamente de. . .
I la experiencia y conocimiento del diseñador sobre ladinámica y la ingeniería de control de la planta
I la observación de un operador humano en acción o de larecabación de la información necesaria de otras manerastales como la indagación lisa y llana
I un modelo matemático difuso
I métodos de aprendizaje basados en redes neuronales

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Mecanismo de inferencia difusa
lingüísticasreglas
inferenciamecanismo de
fuzzi�cation
defuzzi�cation
controlador
operad
or
r(t)
y(t)
m(t)planta
y(t)u(t)
1. interfaz real�difusa
2. base de reglas lingüísticas
3. mecanismo de inferencia
4. interfaz difusa�real

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Razonamiento difuso
Una regla lingüística implica una relación difusa
IF x ISA THEN y ISB ⇐⇒ B = A ◦R
Caso I
antecedente 1 (hecho) x ISAantecedente 2 (regla) IF x ISA THEN y ISB
consecuencia (conclusión) y ISB
Caso II
antecedente 1 (hecho) x ISA′
antecedente 2 (regla) IF x ISA THEN y ISBconsecuencia (conclusión) y ISB′
¾Cómo calculamos B′? ⇒ B′ = A′ ◦R

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Razonamiento difuso
Una regla lingüística implica una relación difusa
IF x ISA THEN y ISB ⇐⇒ B = A ◦R
Caso I
antecedente 1 (hecho) x ISAantecedente 2 (regla) IF x ISA THEN y ISB
consecuencia (conclusión) y ISB
Caso II
antecedente 1 (hecho) x ISA′
antecedente 2 (regla) IF x ISA THEN y ISBconsecuencia (conclusión) y ISB′
¾Cómo calculamos B′? ⇒ B′ = A′ ◦R
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Razonamiento difuso
Una regla lingüística implica una relación difusa
IF x ISA THEN y ISB ⇐⇒ B = A ◦R
Caso I
antecedente 1 (hecho) x ISAantecedente 2 (regla) IF x ISA THEN y ISB
consecuencia (conclusión) y ISB
Caso II
antecedente 1 (hecho) x ISA′
antecedente 2 (regla) IF x ISA THEN y ISBconsecuencia (conclusión) y ISB′
¾Cómo calculamos B′? ⇒ B′ = A′ ◦R
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Razonamiento difuso
Una regla lingüística implica una relación difusa
IF x ISA THEN y ISB ⇐⇒ B = A ◦R
Caso I
antecedente 1 (hecho) x ISAantecedente 2 (regla) IF x ISA THEN y ISB
consecuencia (conclusión) y ISB
Caso II
antecedente 1 (hecho) x ISA′
antecedente 2 (regla) IF x ISA THEN y ISBconsecuencia (conclusión) y ISB′
¾Cómo calculamos B′? ⇒ B′ = A′ ◦R
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
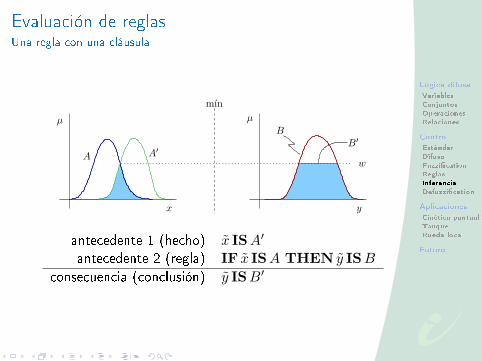
Evaluación de reglasUna regla con una cláusula
x y
mın
B′B
A A′
µµ
w
antecedente 1 (hecho) x ISA′
antecedente 2 (regla) IF x ISA THEN y ISBconsecuencia (conclusión) y ISB′

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Evaluación de reglasUna regla con dos cláusulas
µ
mın
µ
x
µ
y
B B′
A
A′ C ′C
w1
w2 w
z
antecedente 1 (hecho) x ISA′ AND y ISB′
antecedente 2 (regla) IF x ISA AND y ISB THEN z ISCconsecuencia (conclusión) z ISC ′
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
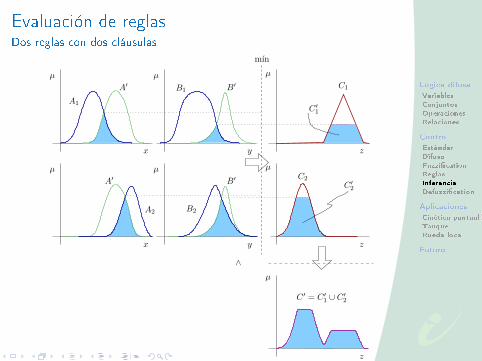
Evaluación de reglasDos reglas con dos cláusulas
z
C1
C ′1
mın
µµ
x
µ
y
µµ
x
µ
y
A2
C2C ′
2
z
B2
A1
B1
z
µ
C ′ = C ′1 ∪ C ′
2
A′
A′ B′
B′
∧

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Evaluación de reglasSimpli�cación del esfuerzo computacional usando el operador singleton
mın
µµ
x
µ
y
µµ
x
µ
y
C2C ′
2
z
B2
z
µ
∧
A′
A′
A2
A1
B1
B′
B′
z
C1
C ′1
C ′ = C ′1 ∪ C ′
2

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Interfaz defuzzi�cation difuso�real
lingüísticasreglas
inferenciamecanismo de
fuzzi�cation
defuzzi�cation
controlador
operad
or
r(t)
y(t)
m(t)planta
y(t)u(t)
1. interfaz real�difusa
2. base de reglas lingüísticas
3. mecanismo de inferencia
4. interfaz difusa�real

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Interfaz difuso�realOperadores defuzzi�cation
Centro de gravedad (COG)
g(z) =
n∑i=1
∫ ∞
−∞z · µi(z) dz
n∑i=1
∫ ∞
−∞µi(z) dz
Promedio de centros (CAV)
p(z) =
n∑i=1
zi · hi
n∑i=1
hi
z
µCOG
CAV

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Cinética puntualElección de las variables lingüísticas
I Planta SISO
I Variables lingüísticas
error ↔ n− nsp
rho ↔ ρctrl
I Controlador discreto
−controlador
difusoDAC+ZOH
ADC
nk
−1cinéticapuntual
ρext(t)
n(t)ρ∗ctrl(t)eknspk

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Cinética puntualElección de los valores lingüísticos y de las reglas
I Valores lingüísticos
error = {negativo, cero, positivo}rho = {negativa, cero, positiva}
µ
0
0.5
1
-2 -1 0 1 2
Entrada normalizada ξ
µ
0
0.5
1
-2 -1 0 1 2
Salida normalizada ψI Reglas lingüísticas
• IF error IS negativo THEN rho IS positiva• IF error IS cero THEN rho IS cero• IF error IS positivo THEN rho IS negativa

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Cinética puntualResultados
I Λβ = 0,013 seg ⇒ f = 200 Hz
I kerr = 0,25 kρ = 150× 10−5 |ρ| ≤ 20× 10−5
75
100
125
150
175
0 50 100 150 200 250
po
ten
cia
[UA
]
potenciasetpoint
−150
−100
−50
0
50
100
150
0 50 100 150 200 250
reac
tiv
idad
[p
cm]
tiempo [seg]
ρctrlρext

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Cinética puntualSensibilidad a la ganancia
−30
−20
−10
0
10
20
0 50 100 150 200 250
erro
r en
la
po
ten
cia
[UA
]
0.250.025
2.5
reac
tiv
idad
[p
cm]
tiempo
2.50.25
0.025
0
50 0 100 150 200 250
50
100
150

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Cinética puntualIn�uencia de las funciones de membresía y del operador defuzzi�cation
-0.002
-0.001
0.000
0.001
0.002
-4 -2 0 2 4error [UA]
CAVCOG con 3 valoresCOG con 5 valores
reactividad
µ
0
0.5
1
-1.5 -1 -0.5 0 0.5 1 1.5
Entrada normalizada ξ
0
0.5
1
−1.5 −1 −0.5 0 0.5 1 1.5
µ
Salida normalizada ψ
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
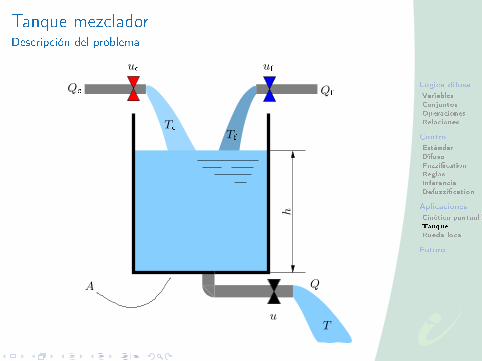
Tanque mezcladorDescripción del problema
h
u
uc uf
Q
T
Qc Qf
TcTf
A

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Tanque mezcladorElección de variables y valores lingüísticos
I Para poder usar mejor el conocimiento lingüístico, convienereferenciar las variables al punto de setpoint
uf0 =Qsp(Tc − Tsp)Qf(Tc − Tf)
uc0 =Qsp(Tsp − Tf)Qc(Tc − Tf)
temperatura ↔ T − Tsp = {fría, ok, caliente}caudal ↔ Q−Qsp = {bajo, ok, alto}ufría ↔ uf − uf0 = {cerrada, normal, abierta}
ucaliente ↔ uc − uc0 = {cerrada, normal, abierta}

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Tanque mezcladorEstrategia de control I�control independiente
I Con la canilla fría controlamos el caudal de salida y con lacanilla caliente la temperatura
• IF caudal IS alto THEN ufría IS cerrada• IF caudal IS ok THEN ufría IS normal• IF caudal IS bajo THEN ufría IS abierta
• IF temperatura IS fría THEN ucaliente IS abierta• IF temperatura IS ok THEN ucaliente IS normal• IF temperatura IS caliente THEN ucaliente IS cerrada

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Tanque mezcladorEstrategia de control II�control combinado
caudal temperatura
fría
okcaliente
ucaliente IS abierta
ufría IS cerrada
ucaliente IS normal
ucaliente IS cerrada
ufría IS normal
ufría IS abierta
temperatura
fría
okcaliente
ucaliente IS abierta
ufría IS normal
ucaliente IS abierta
ucaliente IS normal
ufría IS abierta
ufría IS abierta
temperatura
fría
okcaliente
ucaliente IS normal
ufría IS cerrada
ucaliente IS cerrada
ucaliente IS cerrada
ufría IS cerrada
ufría IS normal
ok
chico
grande

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Tanque mezcladorResultados
3.0
3.5
0 40 80 120
2.5
2.0
caudal[kgseg−
1]
control combinadosetpoint
control independiente
80
60
40
20 0 40 120 80
temperatura
[◦C]
0
0.5
1
0 40 80 120
uf
0
0.5
1
0 40 80 120
uc
tiempo [seg]

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
La rueda loca de Lorenz
I Las reglas del juego
1. el objetivo de control es lograr que la rueda gire en unsentido dado, digamos horario
2. el único parámetro de control es caudal de agua y la únicavariable observable es la posición de la rueda
3. en todo momento el caudal debe estar en el rango de caos

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
La rueda loca de Lorenz
I Las reglas del juego
1. el objetivo de control es lograr que la rueda gire en unsentido dado, digamos horario
2. el único parámetro de control es caudal de agua y la únicavariable observable es la posición de la rueda
3. en todo momento el caudal debe estar en el rango de caos

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
La rueda loca de LorenzComportamiento natural sin control
0 50 100 150 200
vel
oci
dad
[U
A]
tiempo [seg]
Q = 10× 10−6 m3·s−1
0 50 100 150 200
vel
oci
dad
[U
A]
tiempo [seg]
Q = 50× 10−6 m3·s−1
0 50 100 150 200
vel
oci
dad
[U
A]
tiempo [seg]
Q = 180× 10−6 m3·s−1
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
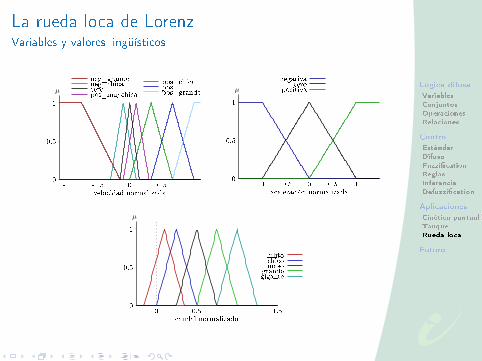
La rueda loca de LorenzVariables y valores lingüísticos
0-1 -0.5 0 0.5 1
velocidad normalizada
0.5
µ
1
neg_grandeneg_chicacero
pos_chicapospos_grandepos_muychica
0
0.5
1
-1 -0.5 0 0.5 1aceleración normalizada
µ
negativacero
positiva
hilitochicomaso
grandegigante
0
0.5
1
0 0.5 1 1.5caudal normalizado
µ

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
La rueda loca de LorenzReglas de la galera
I Reglas lingüísticas, después de algunos días, intentos,insultos y suerte de por medio
IF velocidad IS neg_grande AND aceleracion IS negativa THEN caudal is hilitoIF velocidad IS neg_grande AND aceleracion IS cero THEN caudal is hilitoIF velocidad IS neg_grande AND aceleracion IS positiva THEN caudal IS chico
IF velocidad IS neg_chica AND aceleracion IS negativa THEN caudal IS hilitoIF velocidad IS neg_chica AND aceleracion IS cero THEN caudal IS chicoIF velocidad IS neg_chica AND aceleracion IS positiva THEN caudal IS chico
IF velocidad IS cero AND aceleracion IS negativa THEN caudal IS chicoIF velocidad IS cero AND aceleracion IS cero THEN caudal ISmasoIF velocidad IS cero AND aceleracion is positiva THEN caudal ISmaso
IF velocidad IS pos_muychica AND aceleracion IS negativa THEN caudal ISmasoIF velocidad IS pos_muychica AND aceleracion IS cero THEN caudal ISmasoIF velocidad IS pos_muychica AND aceleracion IS positiva THEN caudal IS grande
IF velocidad IS pos_chica AND aceleracion IS negativa THEN caudal IS grandeIF velocidad IS pos_chica AND aceleracion IS cero THEN caudal IS grandeIF velocidad IS pos_chica AND aceleracion IS positiva THEN caudal IS gigante
IF velocidad IS pos AND aceleracion IS negativa THEN caudal ISmasoIF velocidad IS pos AND aceleracion IS cero THEN caudal IS grandeIF velocidad IS pos AND aceleracion IS positiva THEN caudal IS gigante
IF velocidad IS pos_grande AND aceleracion IS negativa THEN caudal IS grandeIF velocidad IS pos_grande AND aceleracion IS cero THEN caudal is grandeIF velocidad IS pos_grande AND aceleracion IS positiva THEN caudal is gigante

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
La rueda loca de LorenzMapa del controlador
−4−2
02
4
−1
−0,5
0
0,5
1
velocidad[rad/seg]
aceleración[rad/seg 2
]
2
4
0
4× 10−4
3× 10−4
2× 10−4
1× 10−4caudal
[m3/seg]
Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
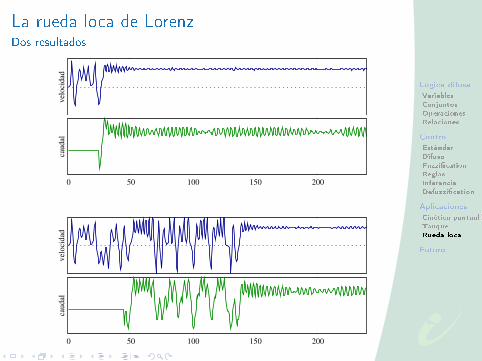
La rueda loca de LorenzDos resultados
velocidad
0 50 100 150 200
caudal
velocidad
0 50 100 150 200
caudal

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Lo que viene ahora. . .es atacar problemas termohidráulicos más interesantes
I A corto plazo, i.e., antes del 29 de junio. . .
• el problema de Welander con controladores lingüísticos• natural circulation loop con controladores de Takagi-Sugeno
I A largo plazo (?) . . .
• boiling channels acoplados con realimentación neutrónica

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Lo que viene ahora. . .es atacar problemas termohidráulicos más interesantes
I A corto plazo, i.e., antes del 29 de junio. . .
• el problema de Welander con controladores lingüísticos• natural circulation loop con controladores de Takagi-Sugeno
I A largo plazo (?) . . .
• boiling channels acoplados con realimentación neutrónica
fuente
sumidero

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Lo que viene ahora. . .es atacar problemas termohidráulicos más interesantes
I A corto plazo, i.e., antes del 29 de junio. . .
• el problema de Welander con controladores lingüísticos• natural circulation loop con controladores de Takagi-Sugeno
I A largo plazo (?) . . .
• boiling channels acoplados con realimentación neutrónica
fuente
sumidero sumidero
fuente
loop

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
Lo que viene ahora. . .es atacar problemas termohidráulicos más interesantes
I A corto plazo, i.e., antes del 29 de junio. . .
• el problema de Welander con controladores lingüísticos• natural circulation loop con controladores de Takagi-Sugeno
I A largo plazo (?) . . .
• boiling channels acoplados con realimentación neutrónica
fuente
sumidero sumidero
fuente
loop
núcleo

Lógica difusaVariablesConjuntosOperacionesRelaciones
ControlEstándarDifusoFuzzi�cationReglasInferenciaDefuzzi�cation
AplicacionesCinética puntualTanqueRueda loca
Futuro
½Gracias por su atención!Afortunadamente el aburrimiento llegó a su �n
¾Preguntas?
Apéndice
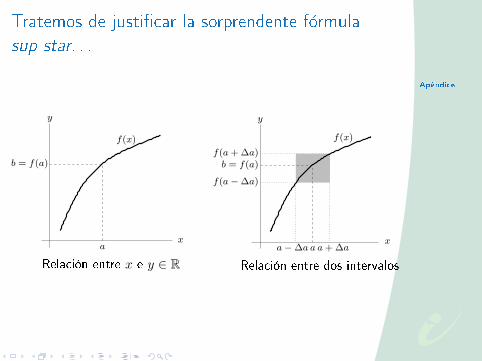
Tratemos de justi�car la sorprendente fórmulasup-star. . .
a
b = f(a)
f(x)
x
y
Relación entre x e y ∈ R
f(x)
aa−∆a a+ ∆ax
y
f(a+ ∆a)b = f(a)
f(a−∆a)
Relación entre dos intervalos

Apéndice
Pasemos ahora al campo difuso. . .
1
0
y
x
µR(x, y)
0
0.5
1
x
µA
0
1
x
y
c(x, y)
0
1
c ∧ µR
y
x

Apéndice
Conjunto difuso obtenidoy un resultado de yapa. . .
1
µB
y
0.5
0
µB(y) = max∀x {mın [µA(x), µR(x, y)]}
Teorema (Resultado útil)
Si B = A ◦R entonces
µR(x, y) = µA(x) ∧ µB(y) = mın [µA(x), µB(y)]
Volver al hilo de la charla