concepção e dimensionamento de um banco de … · - iii - abstract this thesis is the development...
TRANSCRIPT

Concepção e Dimensionamento de um Banco de
Ensaios para Utilização na reparação de Thrust
Reversers
Miguel Filipe Vieira Batista
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Luís Filipe Galrão dos Reis
Eng.º João Martinho Vieira Vizinha
Júri
Presidente: Prof. João Orlando Marques Gameiro Folgado
Orientador: Prof. Luís Filipe Galrão dos Reis
Vogal: Prof. Ricardo Miguel Gomes Simões Baptista
Novembro 2016

- i -
Agradecimentos
Em primeiro lugar, quero agradecer ao meu orientador, o professor Luís Reis
pela ajuda, pela contribuição com sugestões e pelo apoio que me deu durante o
desenvolvimento da tese. Também, quero agradecer ao meu coorientador, o Eng.º
João Vizinha pela ajuda e contribuição com algumas ideias tanto para o
desenvolvimento do banco de ensaio como para a melhor compreensão do Thrust
Reversers (TR) e da sua constituição.
Quero fazer um agradecimento ao Eng.º Miguel Henriques e ao Eng.º João Pita
pela ajuda no desenvolvimento de conceitos e ideias em torno do banco de ensaio e
do TR; ao Eng.º Ricardo Réfega e à Eng.ª Marta Veríssimo pela ajuda e apoio nos
materiais constituintes do TR e da estrutura do banco de ensaio e ao Eng.º António
Ferreira, ao Eng.º Ricardo Corrêa, ao Eng.º Ricardo Azevedo e à Engª Joana pelas
várias sugestões feitas durante as reuniões de projeto.
Também agradeço ao Miguel Cruz pela ajuda na construção da estrutura do
banco de ensaio, ao Pancada Mendes e ao João Rodrigues pela ajuda na estrutura
metálica e parte hidráulica, ao Filipe Pinheiro pela ajuda no desenvolvimento da parte
elétrica, aos soldadores João e Ataíde pela ajuda na soldadura dos componentes e
partilha da experiência na área, ao Marques e ao Proença pela ajuda na seleção e
pesquisa de componentes e pelas várias sugestões facultadas.
Além das pessoas acima referidas, agradeço a todos os outros Engenheiros,
técnicos e funcionários da TAP que me ajudaram e contribuíram para o
desenvolvimento do banco de ensaio e orientação na empresa.
Quero prestar uma homenagem ao meu pai que, apesar de não estar já
presente, ficaria muito orgulhoso do percurso que fiz até agora. Gostaria de agradecer
à minha mãe, à minha irmã, ao meu tio, à minha avó e à minha namorada Marisa
Oliveira pela ajuda concedida e pelo incentivo e motivação que me deram para eu
nunca desistir perante as adversidades sentidas ao longo do meu percurso escolar.
Por fim, quero agradecer aos meus amigos e colegas do Instituto Superior
Técnico, em especial aos alunos João Soeiro e Nuno Chaveiro, pela sua ajuda e
incentivo durante o curso.

- ii -
Resumo
A presente tese tem como objetivos o desenvolvimento e conceção de um
banco de ensaio para auxiliar a manutenção / reparação de Thrust Reversers.
Ao longo da tese serão analisados os vários tipos de Thrust Reverser e de
bancos de ensaios propostos e desenvolvidos por outras empresas ligadas ao ramo
aeronáutico.
O projeto do banco de ensaio está dividido nas seguintes fases:
dimensionamento e fabrico da estrutura, escolha do grupo de potência hidráulica,
projeto do sistema elétrico, análise de custos e abordagem de boas práticas para o
funcionamento em segurança do Thrust Reverser no banco de testes.
O projeto da estrutura passa pela modelação de uma estrutura, seleção de
materiais e análise estática da estrutura, das ligações soldadas e das ligações através
de pinos sujeitas aos esforços exercidos pelo Thrust Reverser. A análise das ligações
soldadas será feita recorrendo ao método AWS, frequentemente utlizado na análise
de estruturas. Os resultados da análise estática serão comparados com os resultados
obtidos pela análise efetuada através do método dos elementos finitos.
A escolha do sistema hidráulico e elétrico será feita em função dos vários
parâmetros de operação do Thrust Reverser em condições de teste e com base em
catálogos de empresas especializadas nesse tipo de equipamentos.
O banco de ensaio deverá ser capaz de realizar os testes hidráulicos e elétricos
ao lado esquerdo e ao lado direito, de forma independente. Embora não seja uma
situação comum, poderá ser realizado o ensaio de conjunto completo.
Palavras Chave: Thrust Reverser, Banco de Ensaio, TAP

- iii -
Abstract
This thesis is the development and conception of a test bench to help the
reparation of Thrust Reversers.
Throughout this thesis, one will analyze the various types of Thrust Reversers,
tests benches proposed and developed by other companies related to the aeronautic
field.
The project of the test bench is divided on the following steps: dimensioning and
manufacturing of the structure, selection of the hydraulic components, electrical
system design, cost analysis and safety procedure.
The structure design is divided on: 3D sketch on CAD software, material
selection, static analysis of the structure, welded joints and hinge joints subjected to
the Thrust Reverser efforts during the test. The welded joint analysis is done by AWS
method, which is often used in structures. Static analysis results will be compared to
the finite element analysis results.
The hydraulic and electrical equipment selection will be done based on
operation parameters of the Thrust Reverser during test and on catalogs of companies
which are specialized in those equipment.
The test bench must be able to performance hydraulic and electrical tests on
the left and right sides, of the Thrust Reverser, in an independent way. It may be able
to test the entire system, but it is not a common situation.
Keywords: Thrust Reverser, Test bench, TAP

- iv -
Índice
Agradecimentos ............................................................................................................ i
Resumo ....................................................................................................................... ii
Palavras Chave ........................................................................................................... ii
Abstract ...................................................................................................................... iii
Keywords .................................................................................................................... iii
Índice .......................................................................................................................... iv
Lista de Figuras .......................................................................................................... vi
Lista de Tabelas ......................................................................................................... xi
Lista de Siglas ........................................................................................................... xii
Lista de Símbolos ..................................................................................................... xiii
1. Memória descritiva e Justificativa ......................................................................... 1
1.1 Aeronaves .................................................................................................... 2 1.2 Tipos de Propulsão das Aeronaves.............................................................. 3 1.3 Aeroestruturas .............................................................................................. 4 1.4 Princípio de Funcionamento dos Motores turbojet e turbofan ...................... 4 1.5 Sistemas de Travagem / Inversão do Impulso ............................................. 7
2. Thrust Reverser ................................................................................................... 8
2.1 Eficiência do Sistema ................................................................................. 12 2.2 Tipos de Thrust Reversers ........................................................................... 13
2.2.1 Target Bucket ...................................................................................... 13 2.2.2 Clam-Shell .............................................................................................. 14 2.3 Cold Stream ............................................................................................... 14 2.4 TR acionado pneumaticamente (Transcowl) .............................................. 15 2.5 TR acionado hidraulicamente (Pivoting Doors) .......................................... 16
3. Bancos de Ensaios............................................................................................. 21
3.1 Bancos de Ensaios Disponíveis no Mercado ............................................. 21 3.2 AMS ........................................................................................................... 21 3.3 Salaerospace ............................................................................................. 23 3.4 Goodrich ..................................................................................................... 23 3.5 Banco de Ensaio Desenvolvido .................................................................. 25 3.6 Desenvolvimento do conceito do TR .......................................................... 27 3.7 Sistema de fixação com pinos (hinges) ...................................................... 28 3.8 Sistema de Fixação com Trincos ............................................................... 32 3.7 Sistema de fixação em anel ....................................................................... 34 3.10 Fase de construção da Estrutura ............................................................ 35
4. Notas de cálculo ................................................................................................. 37
4.1 Análise da Estrutura ................................................................................... 39 4.2 Elemento LWJ ............................................................................................ 39 4.3 Análise da estrutura à esquerda do ponto W ............................................. 40

- v -
4.4 Elemento SR .............................................................................................. 41 4.5 Elemento ERML ......................................................................................... 42 4.6 Elemento LWJ ............................................................................................ 44 4.7 Elemento MN ............................................................................................. 46 4.8 Elemento JNF ............................................................................................ 47 4.9 Outros elementos ....................................................................................... 48 4.10 Cálculo das Ligações das Hinges ........................................................... 48
5. Nota de cálculo das ligações soldadas através do método AWS ....................... 49
5.1 Elemento LJ (no ponto L) ........................................................................... 49 5.2 Elemento SR (no ponto R) ......................................................................... 50 5.3 Elemento LJ (no ponto J) ........................................................................... 51 5.4 Soldadura de uma hinge ............................................................................ 52 5.5 Soldadura das sapatas para o empilhador ................................................. 53
6. Simulações ......................................................................................................... 55
6.1 Análises Estáticas ...................................................................................... 55 6.2 Análise do Conjunto ................................................................................... 55
7. Desenvolvimento do Sistema Hidráulico ............................................................ 56
7.1 Cálculos de Hidráulica ................................................................................ 59 7.2 Fluido Hidráulico......................................................................................... 61 7.3 Escolha do Grupo de Potência Hidráulica .................................................. 61
8. Desenvolvimento do Sistema Elétrico ................................................................ 62
8.1 Sistema Elétrico do TR ............................................................................... 62 8.2 Componentes elétricos do TR .................................................................... 63
8.2.1 Stow switch e deploy switch ................................................................ 63 8.2.2 Pressure Switch .................................................................................. 65 8.2.3 Solenoid Shut-off/ Isolation Valve e Deploy Solenoid Valve ............... 66 8.2.4 Junction Box do TR ............................................................................. 67 8.2.5 Junction Box do Motor ........................................................................ 68
8.3 Sistema de Controlo do TR ........................................................................ 68 8.4 Cálculo dos componentes elétricos ............................................................ 69
9. Análise de Custos .............................................................................................. 71
10. Conclusão ........................................................................................................ 72
11. Desenvolvimento futuro ................................................................................... 72
12. Referências ...................................................................................................... 73
13. Anexos ............................................................................................................. 74

- vi -
Lista de Figuras
Fig. 1.1 – Reator. ........................................................................................................ 4
Fig. 1.2 – Secção. ....................................................................................................... 4
Fig. 1.3 - Esquema de Aplicação de Forças. .............................................................. 5
Fig. 1.4 - Motor Turbojet. ............................................................................................ 5
Fig. 1.5 - Motor Turbofan. ........................................................................................... 6
Fig. 1.6 - Travões nas rodas. ...................................................................................... 7
Fig. 1.7 – Spoilers. ...................................................................................................... 7
Fig. 1.8 - Thrust Reverser. .......................................................................................... 7
Fig. 2.1 - TR fechado. ................................................................................................. 9
Fig. 2.2 – TR aberto. ................................................................................................... 9
Fig. 2.3 - Throttles no cockpit. .................................................................................... 9
Fig. 2.4 - Representação esquemática dos throttles .................................................. 9
Fig. 2.5 - Gráfico da Força de Travagem (com e sem TR). ...................................... 11
Fig. 2.6 - Gráfico da Distância de Travagem (com e sem TR). ................................. 11
Fig. 2.7 - Gráfico de Impulso Invertido em função da potência do motor (ambos em
percentagem). .......................................................................................................... 12
Fig. 2.8 – Representação do TR do tipo Target Bucket em modo fechado e aberto. 13
Fig. 2.9 - TR do tipo Target Bucket em modo fechado. ............................................ 13
Fig. 2.10 – TR do tipo Target Bucket em modo aberto. ............................................ 13
Fig. 2.11 - Representação do TR do tipo Clam-shell em modo fechado e aberto. ... 14
Fig. 2.12 – TR do tipo Clam-shell em modo aberto. ................................................. 14
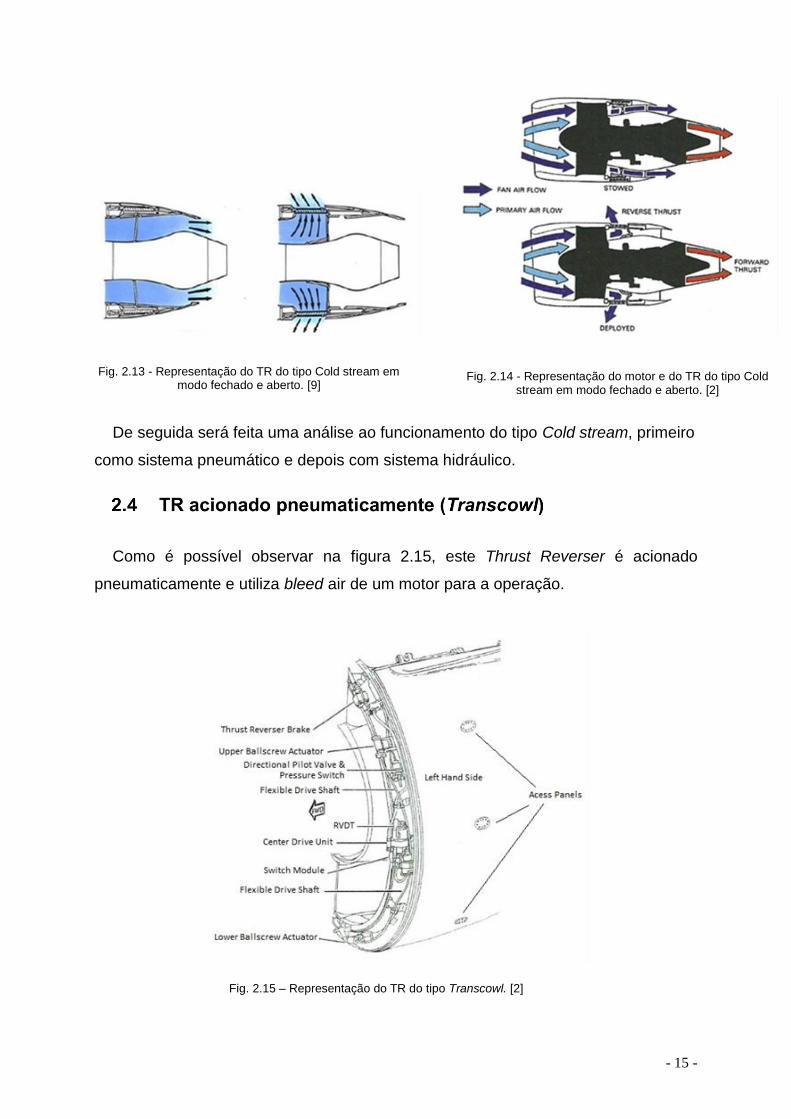
Fig. 2.13 - Representação do TR do tipo Cold stream em modo fechado e aberto. . 15
Fig. 2.14 - Representação do motor e do TR do tipo Cold stream em modo fechado e
aberto. ...................................................................................................................... 15
Fig. 2.15 – Representação do TR do tipo Transcowl. ............................................... 15
Fig. 2.16 - Representação Esquemática do TR acionado hidraulicamente. ............. 16
Fig. 2.17 - SOV. ........................................................................................................ 17
Fig. 2.18 - HCU. ........................................................................................................ 17
Fig. 2.19 - Trinco Hidráulico. ..................................................................................... 17
Fig. 2.20 - Atuador Hidráulico. .................................................................................. 17
- vii -
Fig. 2.21 - Sistema de Segurança: Situação normal. ............................................... 18
Fig. 2.22 - Sistema de Segurança: Falha do trinco da porta..................................... 18
Fig. 2.23 - Pivoting Doors: Montadas no TR. ............................................................ 18
Fig. 2.24 - Pivoting Doors: Individual. ....................................................................... 18
Fig. 2.25 - Pivoting Doors: Representação esquemática. ......................................... 18
Fig. 2.26 - Deploy Switch. ......................................................................................... 19
Fig. 2.27 - Stow Switch. ............................................................................................ 19
Fig. 2.28 - Junction Box: Representação esquemática. ........................................... 20
Fig. 2.29 - Junction Box: Montada no TR. ................................................................ 20
Fig. 2.30 - Representação esquemática dos mecanismos de abertura .................... 20
Fig. 2.31 - Interior do TR........................................................................................... 20
Fig. 2.32 - Exterior do TR. ........................................................................................ 21
Fig. 2.33 - Interior do TR........................................................................................... 21
Fig. 3.1 - Banco de ensaio da AMS criado para a Air France: (a) Vista de frente com
o TR rodado, (b) Vista lateral. ................................................................................... 22
Fig. 3.3 - Unidade de controlo do sistema eléctrico e hidráulico.Fig. 3.2 - Banco de
ensaio da AMS criado para a Air France: (a) Vista de frente com o TR rodado, (b)
Vista lateral. .............................................................................................................. 22
Fig. 3.3 - Unidade de controlo do sistema elétrico e hidráulico ............................... 22
Fig. 3.4 - Banco de ensaio da Salaerospace: (a) com TR, (b) sem TR, (c) Sistema de
transporte. ................................................................................................................ 23
Fig. 3.5 - Banco de ensaio sugerido pela Goodrich. ................................................. 24
Fig. 3.6 - Esquema de montagem do TR no banco de ensaio.................................. 24
Fig. 3.7 - Sistema hidráulico sugerido pela Goodrich: (a) Conjunto completo, (b)
Pormenor do manómetro, (c) Sistema de controlo do sistema hidráulico. ............... 24
Fig. 3.8 - Sistema de controlo do TR sugerido pela Goodrich: (a) Vista de topo, (b)
Em perspetiva. .......................................................................................................... 24
Fig. 3.9 - Representação esquemática do TR com as suas dimensões ................... 26
Fig. 3.10 - Banco de ensaio sugerido pela Goodrich. ............................................... 27
Fig. 3.11 - Sistema de transporte de TR existente nas oficinas de Manutenção de
Motores da TAP. ....................................................................................................... 27
Fig. 3.12 - Sistema de transporte de TR existente nas oficinas de Manutenção de
Motores da TAP. ....................................................................................................... 28
Fig. 3.13 - Pormenor do sistema de fixação através de pinos. ................................. 28

- viii -
Fig. 3.14 – Dimensões da zona de fixação. .............................................................. 29
Fig. 3.15 – Dimensões da hinge. .............................................................................. 29
Fig. 3.16 - Desenho placa que simula o TR em CAD. .............................................. 29
Fig. 3.17 - Desenho do pino em CAD. ...................................................................... 29
Fig. 3.18 - Sistema de fixação de hinges representado em CAD. ............................ 30
Fig. 3.19 – Peça interior. .......................................................................................... 31
Fig. 3.20 – Peça exterior. ......................................................................................... 31
Fig. 3.21 – Conjunto da peças interior e exterior. ..................................................... 31
Fig. 3.22 - Representação esquemática do TR. ....................................................... 32
Fig. 3.23 - Sistema de fixação dos trincos centrais. ................................................. 34
Fig. 3.24 - Pormenor do sistema de encaixe. ........................................................... 34
Fig. 3.25 - Pormenor do encaixe. ............................................................................. 34
Fig. 3.26 – Representação da estrutura em CAD. .................................................... 34
Fig. 3.27 - Legenda da estrutura. ............................................................................. 34
Fig. 3.28 - Serrote mecânico onde foi feito o corte dos tubos. ................................. 35
Fig. 3.29 - Soldadura e montagem da base do banco de ensaio. ............................ 35
Fig. 3.30 – Corte dos componentes. ......................................................................... 35
Fig. 3.31 – Corte para fazer o chanfro. ..................................................................... 35
Fig. 3.32 – Preparação do componente para efetuar a soldadura. ........................... 35
Fig. 3.33 – Primeiro cordão para união das peças. .................................................. 35
Fig. 3.34 – Componente com o primeiro cordão. ...................................................... 35
Fig. 3.35 – Componente após a soldadura. .............................................................. 35
Fig. 3.36 – Desenho da peça do sistema de hinge para corte.................................. 36
Fig. 3.37 – Peça após o corte. .................................................................................. 36
Fig. 3.38 – Construção do pórtico com o sistema de hinges já montado. ................ 36
Fig. 3.39 – Soldadura da viga lateral. ....................................................................... 36
Fig. 3.40 – Soldadura das várias vigas e colocação do chão em alumínio. ............. 36
Fig. 3.41 – TR montado na estrutura. ....................................................................... 37
Fig. 3.42 – Colocação de batentes no banco de ensaio. .......................................... 37
Fig. 4.1 – Modelo esquemático do TR. ..................................................................... 38
Fig. 4.2 – Modelo simplificado do TR. ...................................................................... 38
Fig. 4.3 – Modelo simplificado do TR utilizado nos cálculos. .................................... 38
Fig. 4.4 – Representação esquemática (vista lateral). .............................................. 39
Fig. 4.5 – Representação esquemática (vista isométrica). ....................................... 39

- ix -
Fig. 4.6 – Diagrama do elemento LWJ. .................................................................... 39
Fig. 4.7 – Diagrama da estrutura à esquerda do ponto W. ....................................... 40
Fig. 4.8 – Diagrama do elemento SR. ...................................................................... 41
Fig. 4.9 – Diagrama do elemento ERML. ................................................................. 42
Fig. 4.10 – Diagrama de esforços do elemento ERML. ............................................ 42
Fig. 4.11 – Diagrama de esforços do elemento LWJ. ............................................... 44
Fig. 4.12 – Esquema das tensões de corte, num elemento de secção retangular,
devido à torção. ........................................................................................................ 45
Fig. 4.13 – Esquema das tensões de corte, devido à torção, nulas nos cantos de um
elemento de secção retangular. ............................................................................... 45
Fig. 4.14 – Diagrama do elemento MN. .................................................................... 46
Fig. 4.15 – Diagrama do elemento JQF. ................................................................... 47
Fig. 4.16 - Diagrama de esforços do elemento JNF. ................................................ 47
Fig. 5.1 – Esquema do cordão de soldadura no ponto L. ......................................... 50
Fig. 5.2 – Esquema de soldadura no ponto L. .......................................................... 50
Fig. 5.3 – Imagem do cordão feito na estrutura no ponto L. ..................................... 50
Fig. 5.4 – Esquema do cordão de soldadura no ponto R. ........................................ 51
Fig. 5.5 – Esquema da soldadura no ponto R. ......................................................... 51
Fig. 5.6 – Imagem do cordão feito na estrutura no ponto R...................................... 51
Fig. 5.7 – Esquema do cordão de soldadura no ponto J. ......................................... 51
Fig. 5.8 – Esquema da soldadura no ponto J. .......................................................... 51
Fig. 5.9 – Imagem do cordão feito na estrutura no ponto J. ..................................... 51
Fig. 5.10 – Esquema do cordão de soldadura na hinge (TR direito e esquerdo) ...... 52
Fig. 5.11 – Esquema da soldadura na hinge (TR direito e esquerdo). ..................... 52
Fig. 5.12 – Imagem do cordão feito na hinge. .......................................................... 52
Fig. 5.13 - COG do banco de ensaio. ....................................................................... 53
Fig. 5.14 - Esquema do cordão de soldadura das sapatadas para o empilhador. .... 54
Fig. 5.15 - Esquema da soldadura das sapatas para o empilhador. ......................... 54
Fig. 5.16 - Imagem do cordão feito nas sapatas para o empilhador. ........................ 54
Fig. 6.1 - Resultados análise FEM (Tensões de von Mises)..................................... 55
Fig. 6.2 - Resultados análise FEM (deslocamentos). ............................................... 55
Fig. 7.1 – Esquema da HCU em stow mode. ............................................................ 57
Fig. 7.2 – Esquema da HCU de stow mode para deploy mode. ............................... 57
Fig. 7.3 – Esquema da HCU em deploy mode. ........................................................ 58

- x -
Fig. 7.4 – Esquema da HCU de deploy mode para stow mode. ............................... 58
Fig. 8.1 – Representação esquemática do Stow Switch. .......................................... 63
Fig. 8.2 – Stow Switch na posição ativa. .................................................................. 63
Fig. 8.3 – Stow switch na posição inativa. ................................................................ 63
Fig. 8.4 – Representação esquemática do deploy switch. ........................................ 64
Fig. 8.5 – Deploy switch na posição inativa. ............................................................. 64
Fig. 8.6 – Deploy switch na posição ativa. ................................................................ 64
Fig. 8.7 – Representação esquemática do pressure switch. .................................... 65
Fig. 8.8 – Pressure switch na posição inativa. .......................................................... 65
Fig. 8.9 – Pressure switch na posição ativa.............................................................. 65
Fig. 8.10 - Esquema elétrico das válvulas direcionais da HCU do TR. ..................... 67
Fig. 8.11 - Junction Box do TR. ................................................................................ 67

- xi -
Lista de Tabelas
Tabela 1 - Constituição do aço AISI 321. ................................................................. 30
Tabela 2 - Propriedades mecânicas do aço AISI 321. .............................................. 30
Tabela 3 – Constituição do aço AISI 4130................................................................ 31
Tabela 4 – Propriedades mecânicas do aço AISI 4130. ........................................... 31
Tabela 5 – Coeficientes para o cálculo da tensão de corte devido à torção de um
elemento de secção retangular. ............................................................................... 45
Tabela 6 – Funcionamento do stow switch ............................................................... 63
Tabela 7 – Funcionamento do deploy switch............................................................ 64
Tabela 8 – Funcionamento do pressure switch ........................................................ 65
Tabela 9 - Funcionamento das válvulas de solenoide. ............................................. 66
Tabela 10 – Características das lâmpadas............................................................... 70
Tabela 11 – Características da fonte de alimentação. .............................................. 70
- xii -
Lista de Siglas
AC – Alternative Current
AFS – Actuator Feedback Subsystem
AMM – Aircraft Maintenance Manual
AMS - Appareillages et Materiels de Servitudes
CDU – Center Drive Unit
COG – Center Of Gravity
CMM – Component Maintenance Manual
DPV – Directional Pressure Valve
ECS – Environmental Control System
ECU – Electronic Control Unit
EIVMU – Engine Interface and Vibration Monitoring Unit
FADEC – Full Authority Digital Engine Control
FCPC – Flight Control Primary Computers
GE – General Electric
HCU – Hydraulic Control Unit
HPC – High Pressure Compressor
HPT – High Pressure Turbine
LLP – Life Limited Part
LPC – Low Pressure Compressor
LPT – Low Pressure Turbine
ME – Manutenção e Engenharia
MM – Manutenção de Motores
PS – Pressure Switch
RVDT – Rotary Variable Differential Transducer
SB – Service Bulletins
SNECMA – Societe Nationale Et de Construction de Moteurs d’Aviation
SOV – Shut Off Valve
TAP – Transportes Aéreos Portugueses
TR – Thrust Reverser
TRAS Lock – Thrust Reverser Autonomous System Lock
TRPV – Thrust Reverser Pressure Valve

- xiii -
Lista de Símbolos
(Izz) u – momento de inércia unitário de um cordão de soldadura segundo a direção z
(Sy)s – tensão de cedência para um carregamento de corte
A – área da secção
ac – dimensão do cateto de um cordão de soldadura
a – distância do ponto M ao ponto L
Ac – área de um cordão de soldadura
Acil – área do cilindro hidráulico
Acorte – área de corte do pino de uma hinge
Au – área unitária de um cordão de soldadura
b – distância do peso do TR ao início da hinge beam
bc – largura de um cordão de soldadura
be - largura de um elemento de secção retangular
c – distância à linha neutra do cordão de soldadura
D – diâmetro maior do cilindro hidráulico
d – distância do ponto R ao ponto E
dc – comprimento de um cordão de soldadura
dh – diâmetro da haste do cilindro hidráulico
E – modulo de Young
Fcorte – força de corte exercida no pino de uma hinge
h – altura de um elemento de secção retangular
h1- altura do trinco 1 em relação ao trinco 3
h2 – altura do trinco 2 em relação ao trinco 3
HB – altura piezométrica da bomba
hc – dimensão da garganta de um cordão de soldadura
hv – altura da viga do trincos centrais em relação ao solo
I – momento de inércia
Il – Corrente elétrica de uma lâmpada
Izz – momento de inércia segundo a direção z
J – momento polar de inércia de um cordão de soldadura
Ju – momento polar de inércia unitário de um cordão de soldadura
L – comprimento do elemento
L1 – altura do pórtico

- xiv -
L2 – comprimento da hinge beam
Lc – comprimento total do cordão de soldadura
M – momento flector
m1, m2, m3, m4 – caudal mássico em cada atuador
mb – caudal mássico à saída da bomba
Mt – momento torsor aplicado na hinge beam devido ao peso das metades do TR
Mz – momento fletor segundo a direção z
n – coeficiente de segurança
N – esforço normal
ns – coeficiente de segurança para um carregamento de corte
P – Potência elétrica de uma lâmpada
PB – Potência da bomba
Pcr – carga crítica de instabilidade
QA – caudal à entrada de um atuador
Qb – caudal à saída da bomba
r – raio / distância ao eixo de rotação de um cordão de soldadura
Sy – tensão de cedência do material
T – momento torsor
U – tensão de uma lâmpada
V – esforço transverso
v – velocidade de avanço de um atuador
Vy – esforço transverso segundo a direção y
Vz – esforço transverso segundo a direção z
W – peso total do TR
W1 – peso da metade esquerda do TR
W2 – peso da metade direita do TR
x1 – distância entre centros do trinco 1 e do trinco 3
x2 – distância entre centros do trinco 2 e do trinco 3
yc - distância do centróide, segundo a direção y, de um cordão de soldadura em
relação ao ponto mais inferior
y – distância do ponto à linha neutra da secção

- xv -
Letras gregas
α – constante para o cálculo da tensão de corte devido ao momento torsor
η – rendimento da bomba
θ - inclinação da base do TR
θ – inclinação do elemento LA, LB, JC e JD
θ1 – inclinação do elemento SR
ρ – densidade do fluido hidráulico
σ – tensão normal à secção
σadm – tensão normal admissível para um cordão de soldadura
σM – tensão devido ao momento fletor
σN – tensão devido ao esforço normal
σVM– tensão de von Mises
τadm – tensão de corte admissível para um cordão de soldadura
τresultante – tensão de corte resultante de um carregamento num cordão de soldadura
τT – tensão de corte devido ao momento torsor
τV – tensão de corte devido ao esforço transverso
τx – tensão segundo a direção x de um cordão de soldadura
τy – tensão segundo a direção y de um cordão de soldadura
τz – tensão segundo a direção z de um cordão de soldadura


- 1 -
1. Memória descritiva e Justificativa
Atualmente, o avião é um dos meios de transporte mais importante que existe.
Este meio de transporte permite que vários passageiros se desloquem grandes
distâncias, em pouco tempo.
Para garantir um voo seguro, é necessário fazer a manutenção da aeronave e
verificar se todos os componentes mecânicos e eletrónicos estão operacionais para
evitar falhas em pleno voo. Existem equipas de técnicos e engenheiros que trabalham
para garantir a boa manutenção das aeronaves, proporcionando a segurança dos
passageiros e da tripulação.
O avião é um meio de transporte cujos custos associados são elevados, uma
vez que as companhias aéreas não podem negligenciar a manutenção da aeronave
sob pena de perderem uma percentagem elevada do investimento realizado,
apresentando assim um grande impacto económico.
Dos vários componentes constituintes das aeronaves, um deles é o Thrust
Reverser que é utilizado na travagem, para além dos travões e dos spoilers. Dado a
sua utilização ser frequente, existe um grande desgaste dos componentes, o que leva
à necessidade da sua reparação e manutenção. De forma a garantir o funcionamento
correto deste sistema, é necessário que se façam testes de verificação e validação
dos componentes para que se cumpram os níveis de segurança, nas várias fases de
utilização.
A oficina de Manutenção de Motores da TAP procede à reparação e
manutenção de motores e de Thrust Reversers da frota de aviões da TAP.
Atualmente, o tipo de manutenção que é feita pelas outras companhias aéreas
é do tipo on-condition, ou seja, a manutenção ou reparação do componente apenas é
feita quando este apresenta alguma falha. Contrariamente, a manutenção do tipo
Periodic Overhaul procede à manutenção de um componente após vários ciclos de
funcionamento. A determinação destes ciclos é feita com base nos manuais
fornecidos pelos fabricantes ou através da experiência adquirida pela empresa.
Normalmente, as empresas de fabrico de componentes subestimam o valor dos ciclos
em que é necessário fazer a manutenção dos componentes, pelo que é importante
apostar na caracterização deste fator.

- 2 -
Tendo visto o potencial que a manutenção dos Thrust Reversers apresenta, a
TAP decidiu investir no desenvolvimento de equipamento para a reparação e teste de
Thrust Reversers. Atualmente, o Thrust Reverser é reparado na oficina de motores e
o seu funcionamento apenas é testado quando este está montado na asa, pois
considerava-se que a reparação efetuada na oficina era suficiente. A manutenção e
verificação na asa são feitas através dos AMM. Verificou-se, entretanto, que este tipo
de Manutenção não era suficiente para garantir um nível de manutenção mais
eficiente, pois havia partes do Thrust Reverser que apresentavam corrosão e, como
eram de difícil acesso, apenas eram detetadas quando este regressasse à oficina.
Para combater esta situação, a TAP decidiu investir no desenvolvimento de um
banco de ensaios para testar o funcionamento do Thrust Reverser antes de este ser
colocado na asa do avião. Esta manutenção e verificação na oficina são feitas através
dos CMM. Além disso são utilizados boletins de serviço SB para registar o tipo de
falha ocorrida e o tipo de reparação utilizada.
Assim, a presente tese apresenta como objetivo a conceção, o
desenvolvimento de um banco de ensaios para utilização na reparação de Thrust
Reversers do motor CFM56-5B e a elaboração de normas de teste para que o
equipamento deixe a oficina com uma certificação de inspeção reconhecida pelas
outras companhias aéreas, que poderão recorrer aos serviços da TAP para a
manutenção deste equipamento.
Sendo que o Thrust Reverser é um componente de uma aeronave que deflecte
o fluxo de ar do motor para inverter o sentido do movimento, é importante, antes de
fazer a sua análise detalhada, conhecer o tipo de aeronaves existentes, os
componentes do motor e as diferenças entre si.
O banco de ensaio destina-se ao teste de Thrust Reversers utilizados num motor
CFM56-5B. Estes motores são produzidos pela CFM que é uma joint venture entre a
GE Aviation, uma divisão da General Electric, que é uma empresa Norte Americana,
e a SNECMA, uma divisão da Safran, que é uma companhia francesa. O nome do
motor CFM56 deriva da união dos nomes do motor CF6 produzido pela GE e do M56
produzido pela SNECMA. CFM é uma sigla utilizada para designar “Creates Forward
Motion” ou “Commercial Fan Motor”.
- 3 -
Os motores CFM56-5B equipam a frota de aviões da TAP que incluem a família
de aviões A320 (A318, A319, A320, A321) destinados a voos de curta distância.
Atualmente, existem duas formas de assegurar a propulsão de uma aeronave: o
motor a hélice e o motor a jato.
No caso da aeronave com motor a hélice, esta utiliza um motor a gasolina que
funciona de modo análogo aos automóveis atuais: admissão, compressão, combustão
e escape. O movimento do êmbolo, no interior do cilindro, é convertido em movimento
rotativo do veio através de um sistema de biela-manivela. Finalmente, o veio comunica
o movimento rotativo à hélice.
Esta solução é, ainda hoje, correntemente adotada em aviões cuja velocidade de
voo não ultrapassa cerca de 800km/h. Porém, a propulsão a hélice não é adequada
para equipar aeronaves que se destinem a voar a velocidades próximas ou superiores
ao limite transónico. Assim, como alternativa utiliza-se o motor a jato.
A propulsão a jato é uma técnica relativamente recente: os primeiros passos nesse
sentido foram dados pelo britânico Frank Whittle que, em 1930, registou a patente de
um motor a jato. Desde então, essa área tem vindo a registar progressos elevados,
nos domínios militar e civil. Hoje a propulsão a jato divide-se, essencialmente, por
quatro tipos de motor:
1) Motor turborreator (turbojet engine)
2) Motor turboventilador (turbofan engine)
3) Motor estatorreator (ramjet engine)
4) Motor-foguete (rocket engine)
Devido ao facto da frota de aviões da TAP utilizar na sua maioria aviões equipados
com motores com turbofan, apenas se analisará com mais detalhe o motor turbojet e
turbofan já que o seu princípio de funcionamento é semelhante, como se verá
posteriormente.
Os motores estatorreator e motor-foguete não possuem partes móveis, sendo
utilizados em condições supersónicas, tais como mísseis, aviação supersónica e
exploração espacial. Como não são utilizados na aviação comercial, não se fará uma
análise mais detalhada.

- 4 -
A aeronave do tipo turbojet e turbofan possui uma fuselagem, asas, cauda, sistema
de propulsão, sistema de travagem e sistemas de monitorização. Como o TR é um
componente que abraça o motor, serão apresentados os componentes que fazem
parte desse sistema (nacelle). O pylon é o componente que une o conjunto à asa do
avião. A estrutura é constituída pelo inlet cowl (capotagem que permite a entrada de
ar), o fan cowl (capotagem que protege a fan), TR que envolve o motor e deflecte o ar
de bypass e o exhaust (sistema de escape constituído pelo nozzle e o cone), ver
figuras 1.1 e 1.2.
O motor turbofan é uma evolução moderna de um turbojet e que foi desenvolvido
na segunda metade dos anos 70 para equipar aviões Boeing 737.
A propulsão a jato é uma aplicação direta da 3ª Lei de Newton, que estabelece que
“para cada força atuante num corpo, há uma força oposta de igual direção e
intensidade”, ou seja, para todas as forças há sempre uma força de reação. No caso
da propulsão, o “corpo” sobre o qual estão a ser exercidas as forças é o ar que passa
nos reatores, tendo como resultado a sua aceleração.
Como se pode observar na figura 1.3, a força necessária para provocar a
aceleração do ar tem, por isso, uma força de reação de sentido oposto que vai ser
responsável pelo movimento do avião. Esta força é designada por impulsão.
Fig. 1.1 – Reator [2]. Fig. 1.2 – Secção [2].

- 5 -
Dado que os reatores turbofan são, essencialmente, uma aplicação moderna
de uma turbina a gás (motor turbojet) procede-se de seguida à explicação entre o
modo de funcionamento de um e de outro.
Num turbojet (figura 1.4), todo o ar é admitido pelo compressor, sendo
seguidamente queimado numa câmara de combustão. Os gases da combustão são
turbinados e libertados para a atmosfera, sendo a energia gerada pela turbina utilizada
para mover o compressor. O funcionamento destes motores pode ser
aproximadamente descrito como uma turbina a gás convencional (Ciclo de Brayton).
Nas turbinas a gás, é usual definir-se um núcleo do motor (core), sendo este composto
pelo compressor, pela câmara de combustão e pela turbina.
Por sua vez, num turbofan (figura 1.5) o core do motor está compreendido por
uma fan e um compressor de baixa pressão (Booster) a montante e uma turbina
adicional a jusante. O impulso é então conseguido, combinando os gases de escape
a elevada velocidade, provenientes da queima de combustível, com um escoamento
numa conduta originado pela fan.
Fig. 1.3 - Esquema de Aplicação de Forças [2].
Fig. 1.4 - Motor Turbojet. [2]

- 6 -
Do fluxo de ar que é admitido pela fan, uma pequena parte prossegue para o
core (≈20%), caudal primário, providenciando oxigénio para que ocorra a combustão,
que será responsável por gerar potência térmica, e fornecendo ar para os circuitos de
arrefecimento do reator. Analogamente, ao que acontece nos motores turbojet, as
turbinas são responsáveis por efetuar a conversão desta potência térmica para
potência mecânica, de modo a que os compressores e a fan a possam aproveitar. No
caso particular de um turbofan de veio duplo, a Turbina de Baixa Pressão (LPT) move
a fan e o compressor de baixa pressão através de um veio interior (velocidade de
rotação N1) e a HPT é então responsável por transmitir movimento ao HPC fazendo
uso de um veio exterior (velocidade de rotação N2) que envolve o veio interior.
O restante ar, que representa os restantes 80% do fluxo total chama-se caudal
secundário de ar ou de bypass. A relação de bypass é a relação entre o caudal
secundário que contorna o core e o caudal primário que passa pelo core. No caso do
CFM56-5B, o bypass é de 5,5:1 a 6:1, ou seja, o caudal de ar secundário é 5,5 a 6
vezes superior ao caudal de ar primário. Atualmente conseguem-se atingir relações
até 11 para 1.
A diferença como cada tipo de motor produz impulso fica visível quando é
aplicada a Segunda Lei de Newton (F=MA). No caso do turbojet, o impulso é atingido
pelo aumento do termo da aceleração através da combustão dos gases de escape a
elevada velocidade e temperatura. Este aumento de temperatura e velocidade tem
como consequência o aumento do ruído, devido ao diferencial térmico entre os gases
de escape e os gases da atmosfera e pela fricção dos gases na tubeira de escape.
Por este motivo, este tipo de motor é utilizado em aviação militares, pois não estão
Fig. 1.5 - Motor Turbofan. [2]

- 7 -
constrangidos pelo ruído e poluição. Nas aeronaves militares, pretende-se maximizar
a velocidade e a manobrabilidade das aeronaves, o que leva à escolha de reatores
turbojet, pois são mais pequenos, mais leves e mais económicos a velocidades
supersónicas, especialmente a Mach superior a 3.
Por outro lado, o turbofan aumenta o seu impulso ao aumentar o caudal
mássico que atravessa o bypass. Além disso, este caudal secundário é utilizado para
arrefecer os gases que saem da turbina, reduzindo o diferencial térmico à saída e
diminuído o ruído da aeronave. É por este motivo que se utilizam aeronaves com
elevado bypass para que possam ser utilizadas em zonas urbanas.
Assim, hoje em dia, predominam na aviação comercial, os motores turbofan, uma
vez que as aeronaves são projetadas para voar a velocidades de cruzeiro subsónicas
relativamente altas (700 Km/h – 1000 Km/h) e a elevadas altitudes (≈ 30.000 ft). No
âmbito destas especificações de voo, os reatores turbofan são extremamente
eficientes e apresentam um consumo específico de combustível muito inferior ao dos
turbojet. Os turbofan são mais económicos e menos poluentes e ruidosos que os
turbojet, uma vez que consumem menos combustível.
Depois de atravessar uma determinada distância, a aeronave tem de pousar. O
pouso de uma aeronave consiste em aterrar, levar a aeronave a uma velocidade baixa
(taxi speed) e à sua paragem completa. Contudo, a maioria dos motores a jato
comerciais continuam a produzir impulso para a frente, mesmo quando estão inativos,
atuando contrariamente à desaceleração do avião. Os travões do trem de aterragem
e os spoilers das aeronaves modernas são suficientes em circunstâncias normais,
mas por razões de segurança, e para reduzir as tensões nos travões, é necessário
outro método de desaceleração: a inversão do impulso, ver figuras 1.6, 1.7 e 1.8.
Fig. 1.6 - Travões nas rodas. [9] Fig. 1.7 – Spoilers. [9] Fig. 1.8 - Thrust Reverser. [9]

- 8 -
Tipicamente, as aeronaves pequenas não possuem sistemas de inversão de
impulso, exceto em aplicações especializadas. Por outro lado, as aeronaves maiores,
que pesam mais de 12500 lb, têm quase sempre a capacidade de inverter o impulso.
As aeronaves com motor a hélice (turbopropeller) e motor a jato (turbojet, turbofan)
podem ser projetadas para incluir sistemas de inversão de impulso.
As aeronaves movidas a hélice geram a inversão de impulso através da alteração
controlada do ângulo das pás das hélices, de modo a que estas direcionem o seu
impulso para a frente. Esta característica tornou-se disponível com o desenvolvimento
de hélices de pás controláveis, às quais se pode variar o ângulo das pás para que a
potência do motor seja utilizada eficientemente numa elevada gama de condições. As
aeronaves com um único motor tendem a não ter um sistema de inversão de impulso.
Contudo, as aeronaves com hélice (turbopropeller), tais como o PAC P-750
XSTOL, Cessna 208 Caravan, and Pilatus PC-6 Porter apresentam esta característica
disponível.
2. Thrust Reverser
Nas aeronaves com motor a jato, um método simples e eficiente de travagem é
inverter a direção do fluxo de escape do motor a jato e utilizar a potência do próprio
motor para desacelerar. Existe um conjunto de Thrust Reversers em cada motor da
aeronave A320. Cada conjunto consiste em duas metades que estão articuladas,
através de hinges, no topo do pylon e trancadas em conjunto no topo da split line.
Além disso, o conjunto está encastrado no final da estrutura da fan. Este sistema só
funciona em conjunto, ou seja, não se pode deflectir o ar apenas de um lado.
Assim, Thrust Reverser (“inversor de impulso”) é um desvio temporário no sistema
de escape do motor de uma aeronave de modo a que os gases de escape produzidos
sejam direcionados para a frente, em vez de irem para trás. Este mecanismo atua
contrariamente ao deslocamento para a frente da aeronave, promovendo a
desaceleração. Idealmente, o fluxo de escape invertido deveria ser direcionado para
a frente, em linha reta. No entanto, por razões aerodinâmicas, esta situação não é
possível, utilizando-se um ângulo de 45º e resultando numa solução menos eficiente,
ver figuras 2.1 e 2.2.

- 9 -
Os sistemas de inversão estão incorporados em várias aeronaves com motor a
jato para as auxiliar a abrandar, logo após a aterragem, reduzindo o desgaste nos
travões e permitindo distâncias de aterragem mais pequenas. As companhias aéreas
consideram-nos importantes para a aterragem ser feita em condições de segurança.
A inversão de impulso é tipicamente utilizada imediatamente após a aterragem,
geralmente em conjunto com os spoilers para melhorar a desaceleração mais cedo
na aterragem. Neste momento, a sustentação aerodinâmica residual e velocidade
elevada limitam a eficiência dos travões localizados no trem de aterragem.
Na maior parte dos cockpits, a inversão de impulso é acionada manualmente.
Colocam-se os comandos do motor (throttle) em idle, aciona-se o comando (throttle)
do TR e, quando todas as condições necessárias para a aterragem estiverem
reunidas, coloca-se o throttle do motor no máximo para que o motor produza o máximo
de impulso, auxiliando a travagem, ver figuras 2.3 e 2.4.
Fig. 2.1 - TR fechado [2]. Fig. 2.2 – TR aberto [2].
Fig. 2.3 - Throttles no cockpit. [2] Fig. 2.4 - Representação
esquemática dos throttles [2]

- 10 -
O Thrust Reverser está projetado para ser apenas utilizado no solo,
funcionando em quatro modos: fechado (stow), aberto (deploy), desativado
(deactivated) e manual.
Em modo fechado, o sistema de inversão atua como uma estrutura
aerodinâmica de modo a armazenar e proteger o motor da aeronave e os seus
componentes. O reverser também funciona como conduta que fornece um fluxo
aerodinâmico e um caminho de saída aos gases do sistema de escape da fan do
motor.
No modo aberto, o reverser muda a direção do fluxo de ar de escape do motor
de modo a obter-se uma inversão do impulso. Esta inversão do impulso origina um
efeito de travagem que diminui a velocidade de avanço da aeronave na paragem.
Para que se possa acionar o Thrust Reverser devem ser cumpridos os
seguintes requisitos:
1) Todas as rodas devem estar no solo para garantir o touchdown. A verificação
é feita através de sensores de peso nas rodas;
2) Todas as rodas devem estar a rodar com suficiente velocidade para
acompanhar a aeronave. A verificação é feita através de sensores de
velocidade das rodas;
3) A aeronave deve deslocar-se suficientemente devagar. A verificação é feita
através de um sensor de limite da velocidade do ar.
4) Os throttle, que são os comandos dos reatores e dos TR, devem estar na
posição correta. A verificação é feita através de sensores de posição nos
throttle.
A desaceleração inicial fornecida pela inversão de impulso pode reduzir a força de
travagem e distância de aterragem em um quarto ou mais, como se pode observar
nas figuras 2.5 e 2.6.

- 11 -
Os regulamentos exigem, contudo, que uma aeronave deve ser capaz de
aterrar numa pista sem a utilização do Thrust Reverser para que esta seja certificada
para aterrar nesse local.
Assim que a velocidade da aeronave tenha abrandado, a inversão do impulso
é desligada para prevenir que a corrente de ar invertido atire detritos para a admissão
de ar na frente do motor e cause dano por objetos exteriores. Se as circunstâncias o
requererem, o inversor de impulso pode ser utilizado até à paragem completa, ou até
para fornecer impulso para empurrar a aeronave para trás, embora os rebocadores
sejam mais utilizados para esse propósito. O momento em que a inversão de impulso
empurra a aeronave para fora da porta, denomina-se powerback.
A necessidade de utilização do Thrust Reverser é mais evidente em cenários
que envolvam mau tempo, onde fatores, tais como a neve ou a chuva na pista
reduzem a eficiência dos travões e em emergências, tais como as descolagens
canceladas.
Uma aplicação especial da inversão de impulso encontra-se em hidroaviões
com vários motores. Estas aeronaves, quando fazem amaragem, não possuem uma
forma convencional de travagem e estão dependentes de slalom, da inversão de
impulso e do atrito da água de modo a abrandar ou a parar. Adicionalmente, a inversão
de impulso é frequentemente necessária para fazer manobras na água, onde é
Fig. 2.5 - Gráfico da Força de Travagem (com e sem TR). [2]
Fig. 2.6 - Gráfico da Distância de Travagem (com e sem TR). [2]

- 12 -
utilizada para fazer viragens apertadas ou até para deslocar a aeronave em sentido
inverso, sendo estas manobras necessárias para deixar a doca ou a praia.
A quantidade de impulso e potência geradas são proporcionais à velocidade da
aeronave, tornando a inversão de impulso mais eficiente em velocidades elevadas.
Para se obter uma máxima eficiência, deve ser acionado rapidamente a seguir à
aterragem. A Figura 2.7 apresenta a percentagem de impulso invertido (em % do
impulso criado) em função da potência do motor (em % do nível de potência em rpm)
para um Thrust Reverser do tipo target bucket. É importante notar que a maior
inversão de impulso (cerca de 60% do impulso criado) é feita para a potência máxima
do motor (100%), ou seja, não é possível aproveitar toda a potência do motor para a
travagem.
Se for ativado a velocidades baixas, pode ocorrer dano por objetos exteriores.
Existe algum perigo para uma aeronave com os Thrust Reversers aplicados ao
levantar novamente da pista devido aos efeitos da inversão do impulso e o efeito de
perda de sustentação devido aos spoilers ainda estarem ativos. Para aeronaves que
são suscetíveis a tal ocorrência, os pilotos devem ter cuidado para atingir uma posição
firme no solo antes de aplicarem a inversão do impulso. Se for aplicado antes de a
Fig. 2.7 - Gráfico de Impulso Invertido em função da potência do motor (ambos em percentagem). [9]

- 13 -
roda (nose-wheel) estar em contacto com o solo, existe a hipótese de aterragem
assimétrica, o que causa um movimento descontrolado em direção ao lado com maior
impulso, já que a manobra da aeronave com a roda (nose-wheel) é a única forma de
manter o controlo da direção do deslocamento nesta situação.
Existem três sistemas de Thrust Reverser de uso comum:
1) Target Bucket
2) Clam-Shell
3) Coldstream
3.1) Pneumático (Translating Cowl)
3.2) Hidráulico (Pivoting Doors)
3.3) Elétrico
De seguida, procede-se à análise de cada tipo:
2.2.1 Target Bucket
O sistema target bucket, ver figuras 2.8, 2.9 e 2.10, utiliza um conjunto de
estruturas que assemelham a baldes (bucket) e que são atuadas hidraulicamente para
inverter o fluxo de gás quente à saída do escape. Durante o funcionamento normal,
estas portas formam um bocal final convergente-divergente para o motor. Na
implementação original deste sistema, no Boeing 707, os dois buckets do inversor
estão articulados para que quando acionados, sejam introduzidos no sistema de
escape do motor, capturando e reorientando a explosão do jato. Este tipo de inversor
é normalmente visível na traseira no motor, durante a sua utilização.
Fig. 2.8 – Representação do TR do tipo Target Bucket em modo fechado e aberto. [9]
Fig. 2.9 - TR do tipo Target Bucket em modo fechado. [2]
Fig. 2.10 – TR do tipo Target Bucket em modo aberto. [2]

- 14 -
O sistema clam-shell, ver figuras 2.11 e 2.12, funciona pneumaticamente e
localiza-se entre a turbina e a tubeira de escape. Quando o sistema é ativado, as
portas que se assemelham a conchas (clam-shell) rodam para abrir as condutas e
fechar a saída normal, fazendo com que o impulso seja direcionado para a frente. Em
motores turbojet, este sistema é menos eficiente do que o sistema target, já que o
sistema clam-shell apenas utiliza o fluxo de ar da turbina que não é tão quente como
os gases de escape.
Além dos dois tipos utilizados em motores turbojet e turbofan com bypass baixo,
existe um terceiro tipo de Thrust Reverser que é utilizado em motores turbofan com
um bypass elevado. Neste sistema, as portas na conduta de bypass são utilizadas
para redirecionar o ar que é acelerado pela secção da fan mas que não passa pela
camara de combustão (chamado ar de bypass) de tal forma que fornece a inversão
de impulso, ver figuras 2.13 e 2.14. O sistema cold stream pode ser ativado
eletricamente, pneumaticamente ou hidraulicamente.
O sistema cold stream é conhecido pela sua integrabilidade estrutural, viabilidade
e versatilidade. Este sistema pode ser pesado e difícil de integrar em nacelles que
alojam motores grandes. É este sistema que é utilizado nas aeronaves da TAP e que
será analisado. No caso do CFM56-5B o sistema é hidráulico.
Fig. 2.11 - Representação do TR do tipo Clam-shell em modo fechado e aberto. [9]
Fig. 2.12 – TR do tipo Clam-shell em modo aberto. [2]
- 15 -
De seguida será feita uma análise ao funcionamento do tipo Cold stream, primeiro
como sistema pneumático e depois com sistema hidráulico.
Como é possível observar na figura 2.15, este Thrust Reverser é acionado
pneumaticamente e utiliza bleed air de um motor para a operação.
Fig. 2.15 – Representação do TR do tipo Transcowl. [2]
Fig. 2.13 - Representação do TR do tipo Cold stream em modo fechado e aberto. [9]
Fig. 2.14 - Representação do motor e do TR do tipo Cold stream em modo fechado e aberto. [2]
- 16 -
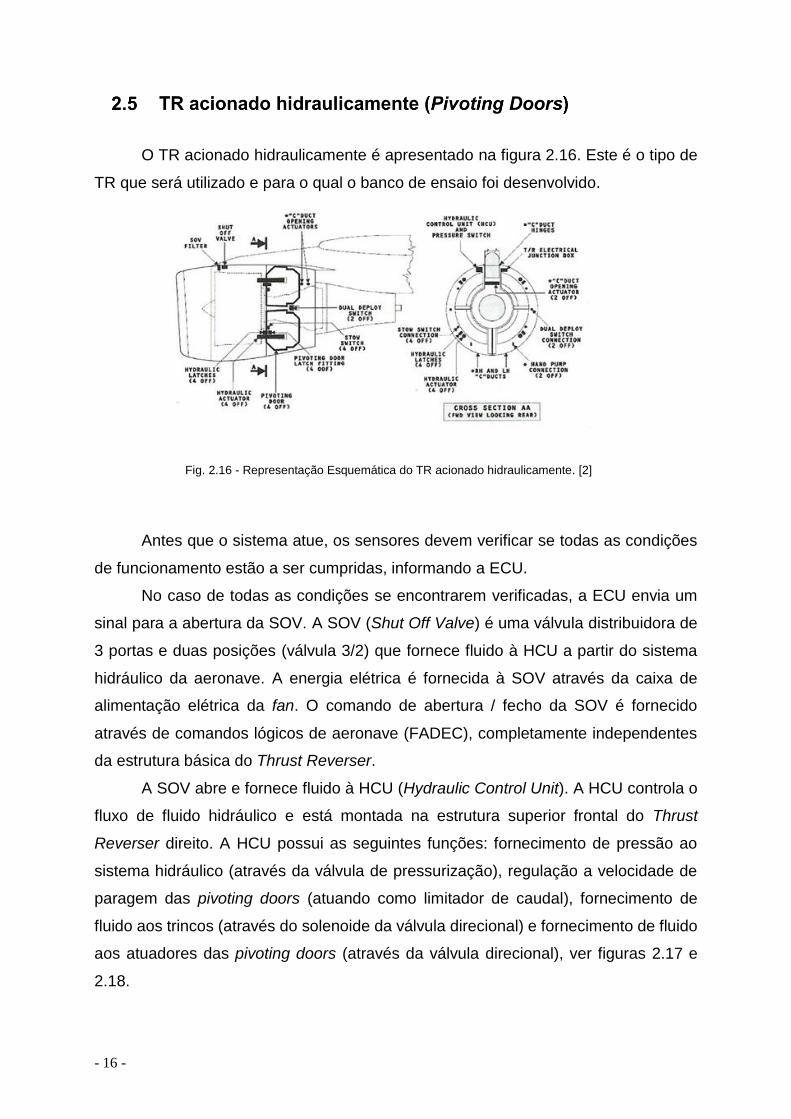
O TR acionado hidraulicamente é apresentado na figura 2.16. Este é o tipo de
TR que será utilizado e para o qual o banco de ensaio foi desenvolvido.
Antes que o sistema atue, os sensores devem verificar se todas as condições
de funcionamento estão a ser cumpridas, informando a ECU.
No caso de todas as condições se encontrarem verificadas, a ECU envia um
sinal para a abertura da SOV. A SOV (Shut Off Valve) é uma válvula distribuidora de
3 portas e duas posições (válvula 3/2) que fornece fluido à HCU a partir do sistema
hidráulico da aeronave. A energia elétrica é fornecida à SOV através da caixa de
alimentação elétrica da fan. O comando de abertura / fecho da SOV é fornecido
através de comandos lógicos de aeronave (FADEC), completamente independentes
da estrutura básica do Thrust Reverser.
A SOV abre e fornece fluido à HCU (Hydraulic Control Unit). A HCU controla o
fluxo de fluido hidráulico e está montada na estrutura superior frontal do Thrust
Reverser direito. A HCU possui as seguintes funções: fornecimento de pressão ao
sistema hidráulico (através da válvula de pressurização), regulação a velocidade de
paragem das pivoting doors (atuando como limitador de caudal), fornecimento de
fluido aos trincos (através do solenoide da válvula direcional) e fornecimento de fluido
aos atuadores das pivoting doors (através da válvula direcional), ver figuras 2.17 e
2.18.
Fig. 2.16 - Representação Esquemática do TR acionado hidraulicamente. [2]

- 17 -
Durante a fase de abertura, antes de haver o acionamento dos atuadores, é
necessário que os trincos hidráulicos sejam destrancados. Isto é feito através de fluido
proveniente de uma das saídas da HCU. Existem quatro trincos, um por cada pivoting
door. Os trincos seguram as portas durante o modo de fecho e estão localizados ao
lado dos atuadores na estrutura frontal do Thrust Reverser. Os trincos são
destrancados hidraulicamente, trancados mecanicamente e estão ligados em série,
para que os atuadores avancem apenas quando todos os trincos estiverem
destrancados. O trinco pode ser destrancado manualmente utilizando uma chave, ver
figuras 2.19 e 2.20.
Assim que os trincos são abertos, a HCU recebe um sinal e abre uma saída
para que o fluido acione os atuadores. Existem quatro atuadores hidráulicos montados
na estrutura frontal através de rótulas, um por pivoting door. Estes atuadores
hidráulicos possuem quatro funções diferentes: abertura e fecho das portas, garantir
um bloqueio secundário na posição de fecho e garantir que a velocidade de rotação
das portas diminui no final da fase de abertura. O atuador é bloqueado mecanicamente
na posição de fecho através de um dispositivo de garra interior. Existe um mecanismo
de desbloqueio manual para libertar o dispositivo de garra para abertura manual.
Fig. 2.17 - SOV. [2] Fig. 2.18 - HCU. [2]
Fig. 2.19 - Trinco Hidráulico. [2] Fig. 2.20 - Atuador Hidráulico. [2]

- 18 -
No caso de um trinco falhar, os atuadores hidráulicos, que abrem ou fecham as
pivoting doors, possuem um trinco secundário. Isto previne que a porta se mova mais
do que 0,5 inch da posição de fecho. Este movimento é suficiente para atuar o
interruptor (unstow switch) que emite o alerta no cockpit, ver figuras 2.21 e 2.22.
Os atuadores estão ligados às pivoting doors. Existem duas pivoting doors
instaladas em cada metade do Thrust Reverser e cada uma roda em torno de um eixo
fixo nas seguintes posições: 3h, 9h, na estrutura superior e estrutura inferior. Quando
o Thrust Reverser está em modo aberto, as quatro portas rotativas redirecionam o
fluxo de ar da fan para a frente. Ao mesmo tempo que redirecionam o fluxo de ar, as
pivoting doors também fecham a saída do ar de bypass. A desvantagem deste sistema
é a de não ser totalmente estanque.
O topo de cada metade do Thrust Reverser possui uma viga com três
articulações (hinge beam). As articulações ligam a metade ao pylon através de pinos
(hinge). A parte de baixo das meias portas é presa com seis trincos. Em modo
fechado, cada porta rotativa está travada na estrutura da frente, para garantir que não
se move, ver figuras 2.23, 2.24 e 2.25.
Fig. 2.21 - Sistema de Segurança: Situação normal. [2] Fig. 2.22 - Sistema de Segurança: Falha do trinco da porta. [2]
Fig. 2.23 - Pivoting Doors: Montadas no TR. [2]
Fig. 2.24 - Pivoting Doors: Individual. [2] Fig. 2.25 - Pivoting Doors: Representação esquemática. [2]

- 19 -
Quando as pivoting doors atingem o fim do curso estas movem a alavanca dos
interruptores de abertura (deploy switch) que envia um sinal à junction box e à ECU a
informar que as portas estão abertas.
A posição de abertura das portas é sentida por dois interruptores de abertura
do Thrust Reverser, um para as duas portas do lado direito e o outro para as duas
portas do lado esquerdo. Eles estão localizados entre as portas correspondentes em
vigas orientadas às 3h e 9h. É um interruptor de fim de curso, ou seja, apenas informa
se a porta está ou não aberta.
Todos os interruptores de abertura estão ligados eletricamente em série para
garantir que em caso de falha de uma porta, mais nenhuma será aberta. As portas
apenas abrem caso o sinal seja válido nos dois interruptores, ou seja, nas quatro
portas. Esta informação aparece no cockpit através de uma luz verde.
Em caso de fecho, o interruptor de fecho (stow switch) indica à ECU se a
pivoting door está fechada. Também é um interruptor de fim de curso e, por isso,
apenas informa se a porta está ou não fechada. Existem quatro interruptores
individuais no Thrust Reverser, um por porta. Estes interruptores estão ligados em
paralelo para que a falha no fecho de uma porta não impeça que as outras portas
fechem.
Os interruptores de abertura e fecho são duais, ou seja, eles possuem duas
células (A e B), cada uma dedicada a um canal da ECU. É considerado um fail safe
system, pois para caso de um dos canais falhar, a informação chega sempre à ECU
pelo outro canal, ver figuras 2.26 e 2.27.
A caixa de conexões elétricas (junction box) do Thrust Reverser transmite sinais
de controlo e feedback entre o ECU e os componentes do Thrust Reverser. Ela é uma
unidade pré-fabricada que possui conexões elétricas para a ligar aos canais “A” e “B”
Fig. 2.26 - Deploy Switch. [2] Fig. 2.27 - Stow Switch. [2]

- 20 -
da ECU e localiza-se no revestimento, depois da fan, na posição 10h (LH), ver figuras
2.28 e 2.29.
Os mecanismos de abertura servem para manter as portas do Thrust Reverser
aberto para efetuar a manutenção e reparação, ver figura 2.30 e 2.31.
Quando o sistema está em modo fechado, as pivoting doors fazem parte da
cowl exterior que cria um contorno exterior aerodinâmico para o ar que sai da fan,
reduzindo o atrito. A cowl interior cria o contorno interior para o ar que sai da fan e do
invólucro exterior do motor. Ambas possuem uma estrutura em favo de mel com
superfícies isoladoras de som, ver figuras 2.32 e 2.33.
Fig. 2.28 - Junction Box: Representação esquemática. [2]
Fig. 2.29 - Junction Box: Montada no TR. [2]
Fig. 2.30 - Representação esquemática dos mecanismos de abertura [2]
Fig. 2.31 - Interior do TR. [2]

- 21 -
3. Bancos de Ensaios
A inversão de impulso é utilizada apenas numa fração do tempo de operação da
aeronave, mas afeta-a em termos de projeto, peso, manutenção, desempenho e
custo. Daí ser importante o desenvolvimento de bancos de ensaios que garantam o
correto funcionamento do Thrust Reverser.
Antes de proceder à conceção e ao dimensionamento do banco de ensaio, ou de
outro equipamento, é prática comum fazer uma pesquisa de mercado para verificar se
existem sistemas já desenvolvidos e que permitem poupar tempo e custos às
empresas. Caso não se consiga encontrar um equipamento que cumpra todas as
funções requeridas, os sistemas existentes podem ser um ponto de partida para o
desenvolvimento e adaptação às necessidades de cada empresa.
A primeira opção foi a pesquisa do banco de ensaios desenvolvido pela AMS
(Appareillages Et Materiels De Servitudes) que desenvolveu um banco de ensaio para
TR especificamente para a Air France, ver figuras 3.1, 3.2 e 3.3.
Fig. 2.32 - Exterior do TR. [2] Fig. 2.33 - Interior do TR. [2]

- 22 -
Este banco de ensaios possui as seguintes características:
1. Uma viga para fazer a ligação ao topo do TR através de pinos (hinges). Estas
ligações podem ser feitas a vários modelos de TR;
2. Uma viga para fazer a ligação aos trincos em baixo;
3. Anéis que unem a parte frontal, o V-Ring do TR, ao banco de teses;
4. Sistema de rotação para simplificação da instalação dos TR no banco de
ensaio;
5. Escada para acesso lateral;
6. Sensor de movimento para segurança;
7. Unidade de controlo para simular informação enviada e recebida do cockpit do
avião.
(b)
Fig. 3.1 - Banco de ensaio da AMS criado para a Air France: (a) Vista de frente com o TR rodado, (b) Vista lateral.
Fig. 3.3 - Unidade de controlo do sistema eléctrico e hidráulico.Fig. 3.2 - Banco de ensaio da AMS criado para a Air France: (a) Vista de frente com o TR rodado, (b) Vista lateral.
Fig. 3.2 - Pormenor do sistema de encaixe do TR.
(a)
Fig. 3.3 - Unidade de controlo do sistema elétrico e hidráulico
- 23 -
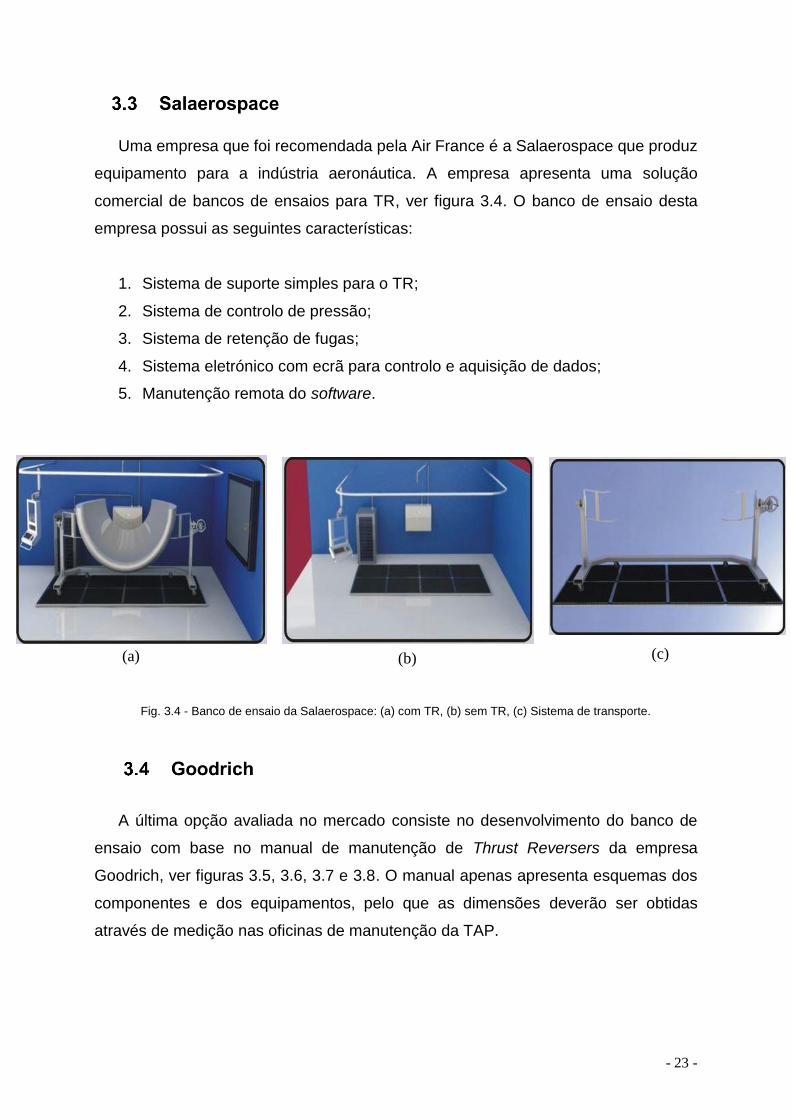
Uma empresa que foi recomendada pela Air France é a Salaerospace que produz
equipamento para a indústria aeronáutica. A empresa apresenta uma solução
comercial de bancos de ensaios para TR, ver figura 3.4. O banco de ensaio desta
empresa possui as seguintes características:
1. Sistema de suporte simples para o TR;
2. Sistema de controlo de pressão;
3. Sistema de retenção de fugas;
4. Sistema eletrónico com ecrã para controlo e aquisição de dados;
5. Manutenção remota do software.
A última opção avaliada no mercado consiste no desenvolvimento do banco de
ensaio com base no manual de manutenção de Thrust Reversers da empresa
Goodrich, ver figuras 3.5, 3.6, 3.7 e 3.8. O manual apenas apresenta esquemas dos
componentes e dos equipamentos, pelo que as dimensões deverão ser obtidas
através de medição nas oficinas de manutenção da TAP.
(a) (b)
(c)
Fig. 3.4 - Banco de ensaio da Salaerospace: (a) com TR, (b) sem TR, (c) Sistema de transporte.

- 24 -
Fig. 3.7 - Sistema hidráulico sugerido pela Goodrich: (a) Conjunto completo, (b) Pormenor do manómetro, (c) Sistema de controlo do sistema hidráulico. [3]
Fig. 3.5 - Banco de ensaio sugerido pela Goodrich. [3]
(b)
(b)
(c)
Fig. 3.8 - Sistema de controlo do TR sugerido pela Goodrich: (a) Vista de topo, (b) Em perspetiva. [3]
Fig. 3.6 - Esquema de montagem do TR no banco de ensaio. [3]
(a)
(a)

- 25 -
O desenvolvimento do banco de ensaio depende de três partes que estão
interligadas: estrutura, sistema hidráulico e sistema elétrico.
Para o início do projeto deve-se ter em conta os requisitos e os
constrangimentos inerentes à estrutura a desenvolver e às etapas que deverão ser
seguidas:
1. Componentes que o banco de ensaio deve suportar
O banco de ensaio deve ser capaz de testar o conjunto (metade direita e metade
esquerda) e cada metade individualmente, sendo que a situação mais comum que
existe na oficina de manutenção é a de teste de uma única metade. Isto deve-se ao
facto de se fazer a reparação da metade do TR que possui alguma falha ou defeito, a
metade que esteja boa permanece no avião e a metade que possui defeito é
substituída por outra equivalente (do mesmo modelo de TR) que tenha sido acabada
de reparar e que possa sair da oficina. Esta solução permite reduzir o tempo que a
aeronave está parada para manutenção.
2. Peso dos componentes
A metade direita do TR é mais pesada do que a metade esquerda devido aos
componentes que a constituem e que diferem de uma metade para a outra (e.g. HCU).
Massa (lado direito) = 198 kg
Massa (lado esquerdo) = 186 kg
3. Área livre para trabalhar
O banco de ensaios deve possuir uma área livre que permita a movimentação dos
técnicos para fazer as ligações do sistema elétrico, do sistema hidráulico e para a
montagem das metades.
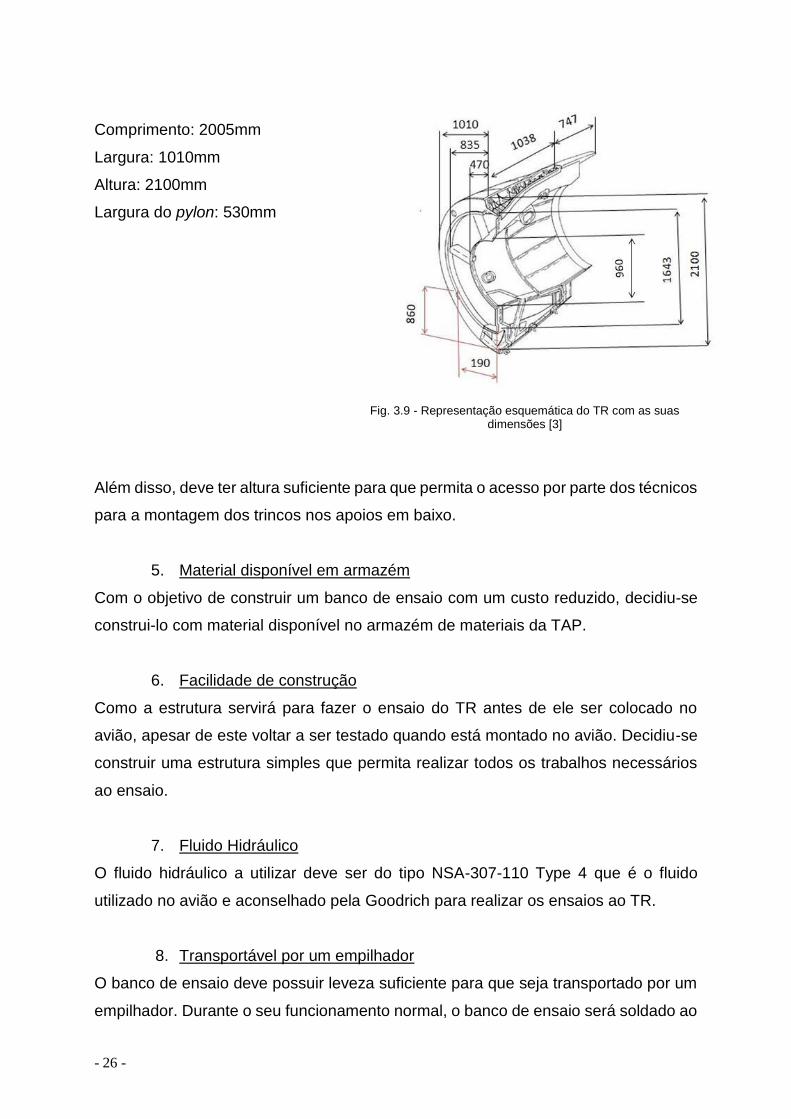
4. Dimensões
O banco de ensaios deve permitir a montagem de um TR do modelo CFM56-5B, ver
figura 3.9, cujas dimensões de atravancamento são:
- 26 -
Comprimento: 2005mm
Largura: 1010mm
Altura: 2100mm
Largura do pylon: 530mm
Além disso, deve ter altura suficiente para que permita o acesso por parte dos técnicos
para a montagem dos trincos nos apoios em baixo.
5. Material disponível em armazém
Com o objetivo de construir um banco de ensaio com um custo reduzido, decidiu-se
construi-lo com material disponível no armazém de materiais da TAP.
6. Facilidade de construção
Como a estrutura servirá para fazer o ensaio do TR antes de ele ser colocado no
avião, apesar de este voltar a ser testado quando está montado no avião. Decidiu-se
construir uma estrutura simples que permita realizar todos os trabalhos necessários
ao ensaio.
7. Fluido Hidráulico
O fluido hidráulico a utilizar deve ser do tipo NSA-307-110 Type 4 que é o fluido
utilizado no avião e aconselhado pela Goodrich para realizar os ensaios ao TR.
8. Transportável por um empilhador
O banco de ensaio deve possuir leveza suficiente para que seja transportado por um
empilhador. Durante o seu funcionamento normal, o banco de ensaio será soldado ao
Fig. 3.9 - Representação esquemática do TR com as suas dimensões [3]

- 27 -
chão para que não ocorra oscilação dos componentes. O transporte pelo empilhador
será necessário para o transporte da estrutura para a zona onde será soldado e para
o caso de se verificar ser necessário mover a estrutura da sua posição atual para
outra.
Na maioria dos projetos que envolvam fabrico de estruturas, estas são na sua maioria
sempre baseadas em estruturas que já foram desenvolvidas, verificando-se que
resultam na prática. No caso do banco de ensaio, o seu desenvolvimento baseou-se
no modelo sugerido pela Goodrich e no carro de transporte de TR que já existe na
TAP há cerca de vinte anos, ver figuras 3.10 e 3.11.
Para se desenvolver um conceito de banco de ensaio, começou-se por analisar os
vários prós e contras das duas estruturas:
1) Banco de ensaio sugerido pela Goodrich:
- Possui 2 hinges beams (1 hinge beam a suportar cada metade do TR);
- Encastramento de um lado;
- Estrutura em anel (V-Groove) que simula o J-Ring do motor, que é o anel
existe no motor onde o TR fica encostado e se adapta à sua forma;
Fig. 3.10 - Banco de ensaio sugerido pela Goodrich. [3] Fig. 3.11 - Sistema de transporte de TR existente nas oficinas de Manutenção de
Motores da TAP.

- 28 -
- Possui área livre para trabalhar.
2) Carro de Transporte existente na oficina de ME:
- Estrutura que permite a ligação do TR através de pinos (hinge);
- Sistema deslizável que permite a adaptação a cada tipo de TR, pois os
diferentes TR possuem as hinges localizadas em zonas diferentes;
- Estrutura tubular que possui rigidez e leveza suficientes para transportar o
TR, ver figuras 3.12 e 3.13.
Após se terem analisado as duas hipóteses, procedeu-se ao desenvolvimento
do conceito da estrutura para que se testassem várias estruturas a nível conceptual e
modelação através de simulação, validação e escolha de uma dessas hipóteses para
se iniciar a construção da estrutura do banco de ensaio.
Antes de se desenvolver a estrutura, é necessário estudar o sistema de fixação
do TR. O TR está fixo em 3 zonas: no pylon nas 12h através de hinges (ligação por
pinos em articulações), trincos às 6h que ligam as duas metades e J-Ring que permite
o encaixe do TR em torno do core.
Em primeiro lugar, começou-se por se desenvolver a estrutura de fixação da
hinge beam, por ser a mais fácil de projetar e fabricar.
Este sistema é constituído por hinges com uma espessura de 16mm e um
espaçamento de 25mm. A distância entre as hinges está representada abaixo e é
importante referir que a primeira hinge encontra-se afastada aproximadamente
27mm da parte da frente do TR, ver figuras 3.14 e 3.15.
Fig. 3.12 - Sistema de transporte de TR existente nas oficinas de Manutenção de
Motores da TAP.
Fig. 3.13 - Pormenor do sistema de fixação através de pinos.

- 29 -
Fig. 3.17 - Desenho do pino em CAD.
Devido ao facto do TR ser um componente com elevada complexidade e pelo
facto do fabricante, a Goodrich, não disponibilizar os desenhos em CAD dos
componentes, modelou-se um TR simplificado. Já que o objetivo é a análise do
comportamento da estrutura quando está sujeito ao peso do TR, uma forma
simplificada de modelar o conjunto passa pelo desenho do sistema de fixação (hinges)
e dos pinos e aplicação do peso distribuído ao longo de uma placa que simula o TR.
A modelação e análise foram feitas em Solidworks devido à facilidade em fazer
desenhos em CAD e em efetuar alterações no modelo quando se considerasse
necessário, ver figuras 3.16 e 3.17.
Além da modelação, é necessário proceder à escolha do material do sistema
de fixação com hinges para que a simulação do conjunto seja mais próxima da
Fig. 3.16 - Desenho placa que simula o TR em CAD.
Fig. 3.14 – Dimensões da zona de fixação. Fig. 3.15 – Dimensões da hinge.

- 30 -
realidade. O TR é constituído por vários materiais de entre os quais ligas de alumínio
e materiais compósitos para que a estrutura seja leve e rígida.
Tal como já foi referido, a ligação é feita através de pinos. Os pinos escolhidos
são de aço AISI321 e possuem um diâmetro de 12mm. O TR é montado no pylon com
pinos do mesmo material e com um diâmetro 13mm para que a folga seja a menor
possível. Escolheram-se pinos de 12mm para que seja fácil a sua remoção do banco
de ensaio, já que não é obrigatório garantir o mesmo tipo de aperto que é exigido na
montagem na aeronave.
Nas tabelas 1 e 2 apresentam-se as características deste tipo de aço.
Este aço foi escolhido devido ao facto de serem estes pinos que são utilizados
na ligação do TR ao motor, por isso, existe uma grande disponibilidade na TAP para
a sua compra e utilização e porque possuem uma tensão de cedência suficientemente
elevada para suportar o esforço exercido, já que no banco de ensaios, o TR está
isolado do motor.
A figura 3.18 mostra como é simulada a ligação do TR ao banco de ensaio. É
importante referir que se teve em conta a largura do pylon ser 530mm, ou seja, a
distância entre o centro dos furos das hinges do lado direito e do lado esquerdo, para
que o TR ficasse perfeitamente encaixado.
Tabela 2 - Propriedades mecânicas do aço AISI 321. Tabela 1 - Constituição do aço AISI 321.
Fig. 3.18 - Sistema de fixação de hinges representado em CAD.

- 31 -
Tabela 3 – Constituição do aço AISI 4130. Tabela 4 – Propriedades mecânicas do aço AISI 4130.
O sistema de hinge que une o TR à estrutura foi baseado no mesmo sistema
que existe no carro de transporte existente na oficina e adaptado a duas metades,
como se mostra nas figuras 3.19, 3.20 e 3.21.
A estrutura interior permite que a hinge deslize ao longo da hinge beam. O
material escolhido para a construção do sistema de hinges e para a estrutura do banco
de ensaio foi o aço AISI4130. Nas tabelas 3 e 4 apresentam-se as características
deste material.
Este aço foi escolhido devido à sua disponibilidade no armazém de material da
TAP e por apresentar uma tensão de cedência elevada e permitir que a estrutura
suporte o carregamento que lhe for imposto, como se verá nos cálculos efetuados e
demonstrados no próximo capítulo.
Fig. 3.19 – Peça interior. Fig. 3.20 – Peça exterior. Fig. 3.21 – Conjunto da peças interior e exterior.

- 32 - Fig. 3.22 - Representação esquemática do TR.
O sistema de fixação com trincos localiza-se na barra das 6h, tal como já foi
referido. Quando o conjunto do TR é montado no avião, o sistema de trincos liga as
duas metades em baixo. Este sistema é constituído por um gancho do lado direito e
um sistema de encaixe do lado esquerdo, permitindo que o TR abrace o motor em
baixo.
No caso do banco de ensaio, deve-se ter em atenção que cada metade do TR
deve ser encaixada individualmente.
A solução encontrada passa pela replicação do sistema de encaixe de cada
metade montado num sistema deslizante, tal como para o sistema de hinges. No caso
do lado que possui o gancho, o banco de ensaio possui um sistema de acoplamento
e no caso do lado com o sistema de encaixe, o banco de ensaio possui um terminal
em gancho para o seu encaixe.
Apesar desta solução simples, deve-se ter em conta os seguintes pontos:
1) O facto de se utilizar a barra das 6h, leva a que o TR não encaixe da mesma
forma que no avião devido ao espaçamento a mais que foi adicionado pela
viga;
2) O TR possui um maior diâmetro na parte frontal relativamente à parte
traseira. Tal como se vê na figura, possui uma inclinação de
aproximadamente 17º (entre o início do TR e o último trinco). Isto implica
que a distância dos trincos à barra das 6h irá variar em função da distância
à frente do TR. Por comodidade do sistema, a barra das 6h irá ficar à mesma
altura que o trinco mais elevado e possuirá uma ligação aos restantes, ver
figura 3.22;

- 33 -
3) Deve-se compensar a distância da hinge em cerca de 115mm, no topo, em
cada lado, pois o valor de 530mm de espaçamento do pylon corresponde à
situação em que as bases não possuem um espaçamento entre si.
Com base no que foi referido anteriormente, desenvolveu-se um sistema de
trincos de 5mm de espessura, um espaçamento de 10mm e um comprimento de
75mm, que são aproximadamente as dimensões reais dos trincos. Os trincos estão
localizados, em relação a parte frontal do TR, a 60mm, 583mm e 960mm. Como o TR
se encontra afastado cerca de 467,5mm da estrutura, como se verá de seguida, os
trincos estão afastados da estrutura cerca de 537mm, 1060,5mm e 1437,5mm,
respetivamente.
Cálculo da altura de cada trinco relativamente à barra das 6h:
O trinco mais elevado fica à mesma altura que a viga, ou seja, 0mm.
A distância do segundo trinco mais elevado em relação ao primeiro é
Em relação ao chão, a viga das 6h fica a uma altura de 1197mm.
A altura dos trincos, relativamente à viga é, respetivamente, de 281,7mm,
141,6mm e 0mm.
O sistema de trincos também é fabricado em aço AISI 4130, pelas mesmas
razões do sistema de hinges. O sistema também utiliza pinos de 12mm fabricados em
aço AISI 321 para que a colocação dos trincos no encaixe seja prática e fácil de
executar, ver figuras 3.23, 3.24 e 3.25.
º2,17
2
105960
180021001
tg
mmx 45755437552
mmtgh 5,141º2,174572
mmx 91055609801
mmtgh 7,281º2,179101
mmtghViga 9,1196º2,1797021003000
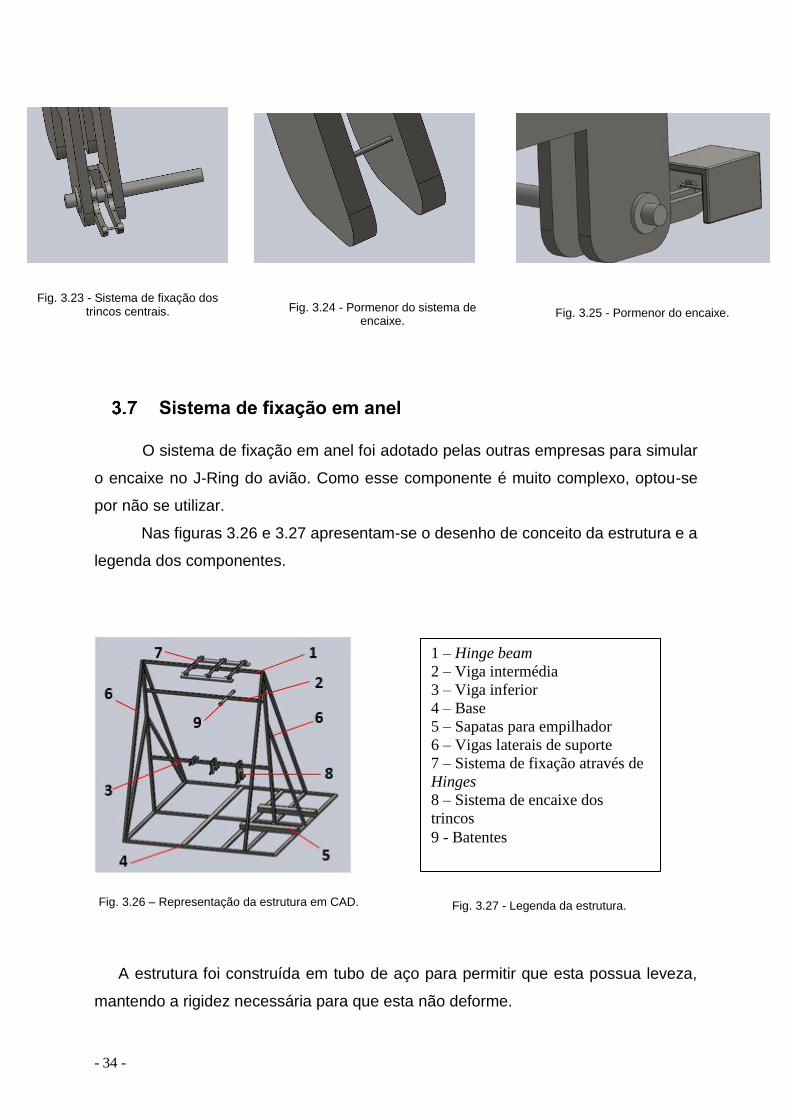
- 34 -
1 – Hinge beam
2 – Viga intermédia
3 – Viga inferior
4 – Base
5 – Sapatas para empilhador
6 – Vigas laterais de suporte
7 – Sistema de fixação através de
Hinges
8 – Sistema de encaixe dos
trincos
9 - Batentes
Fig. 3.27 - Legenda da estrutura.
O sistema de fixação em anel foi adotado pelas outras empresas para simular
o encaixe no J-Ring do avião. Como esse componente é muito complexo, optou-se
por não se utilizar.
Nas figuras 3.26 e 3.27 apresentam-se o desenho de conceito da estrutura e a
legenda dos componentes.
A estrutura foi construída em tubo de aço para permitir que esta possua leveza,
mantendo a rigidez necessária para que esta não deforme.
Fig. 3.23 - Sistema de fixação dos trincos centrais. Fig. 3.24 - Pormenor do sistema de
encaixe. Fig. 3.25 - Pormenor do encaixe.
Fig. 3.26 – Representação da estrutura em CAD.

- 35 -
Fig. 3.32 – Preparação do componente para efetuar a soldadura.
Fig. 3.33 – Primeiro cordão para união das peças.
Fig. 3.34 – Componente com o primeiro cordão.
Fig. 3.35 – Componente após a soldadura.
1. Corte dos tubos com o comprimento desejado e soldadura da base, ver figuras
3.28 e 3.29.
2. Fabrico das hinges (corte e soldadura dos componentes), ver figuras 3.30, 3.31,
3.32, 3.33, 3.34, 3.35, 3.36 e 3.37.
Fig. 3.28 - Serrote mecânico onde foi feito o corte dos tubos.
Fig. 3.29 - Soldadura e montagem da base do banco de
ensaio.
Fig. 3.30 – Corte dos componentes. Fig. 3.31 – Corte para fazer o chanfro.

- 36 -
Fig. 3.36 – Desenho da peça do sistema de hinge para corte.
Fig. 3.37 – Peça após o corte.
Fig. 3.38 – Construção do pórtico com o sistema de hinges já montado.
Fig. 3.39 – Soldadura da viga lateral. Fig. 3.40 – Soldadura das várias vigas e colocação do chão em alumínio.
3. Construção do pórtico com as hinges já colocadas, ver figura 3.38.
4. Reforço da Estrutura com as vigas laterais e viga com batente e chão em
alumínio, ver figuras 3.39 e 3.40.

- 37 -
Fig. 3.41 – TR montado na estrutura. Fig. 3.42 – Colocação de batentes no banco de ensaio.
5. Colocação do TR na estrutura, ver figuras 3.41 e 3.42.
4. Notas de cálculo
Neste capítulo procede-se à análise estática da estrutura: apresenta-se o
diagrama de corpo livre da estrutura, é feita a análise de cada componente (verificação
de segurança) e é apresentado o diagrama de esforços de todas a vigas para a
determinação da secção crítica. A análise da estrutura é feita considerando que todos
os componentes que estejam sujeitos à tração ou compressão são aproximados a
uma barra e todos os componentes que estejam sujeitos a esforços de corte são
aproximados a uma viga.
Devido ao facto do TR ser um componente complexo, procedeu-se a
simplificações para efetuar os cálculos da estrutura.
Assume-se que:
1) Os componentes mais pesados do TR estão localizados na zona frontal da
estrutura, as structs e a beaver tail são muito leves quando comparadas com o
resto dos outros componentes;
2) O peso de cada metade do TR está aplicado no centro da distância entre as
hinges extremas e não no centro geométrico (metade do comprimento total);
3) A HCU possui 220mm de comprimento, pelo que se deverá entrar em conta
com essa dimensão para que não haja interferência com a estrutura;
4) As distâncias entre o início da HCU e o fim da beaver tail à estrutura são iguais
a 247,5mm;

- 38 -
Fig. 4.1 – Modelo esquemático do TR.
Fig. 4.2 – Modelo simplificado do TR.
Fig. 4.3 – Modelo simplificado do TR utilizado nos cálculos.
5) As forças exercidas pelos cilindros hidráulicos são inerentes ao funcionamento
interno do Thrust Reverser, pelo que não afetarão a estrutura diretamente;
6) Apesar do peso do TR estar localizado no centro de gravidade de cada metade,
considera-se que este está aplicado diretamente nas hinges, ou seja, a 380mm
em cada lado. Os 380mm é a distância de cada hinge ao pylon do avião
(265mm, medido no hangar num -5B) somada com a compensação da largura
dos trincos de cada lado (115mm).
O modelo simplificado da hinge beam é apresentado nas figuras 4.1, 4.2 e 4.3.

- 39 -
0:0 yyy JWLF
0:0 xxx JLF
2
2 0:0L
WbJLJWbM yy
L
Z
NJ y 5,14862500
5,98604,3767
NJWL yy 6,2280474,148604,3767
Fig. 4.5 – Representação esquemática (vista isométrica). Fig. 4.4 – Representação esquemática (vista lateral).
Fig. 4.6 – Diagrama do elemento LWJ.
Os cálculos do modelo simplificado do TR são apresentados de seguida.
A estrutura final é apresentada de forma esquemática, ver figuras 4.4 e 4.5.
O elemento LWJ é analisado assumido que se comporta como uma viga apoiada
nos pontos L e J e com o peso do TR aplicado no ponto W, ver figura 4.6.
NmWWM
NWWW
NWW
NWW
t
Direito
Esquerdo
7,44103807,18244,194210380
1,37674,19427,1824
4,194281,9198
7,182481,9186
33
12
21
2
1
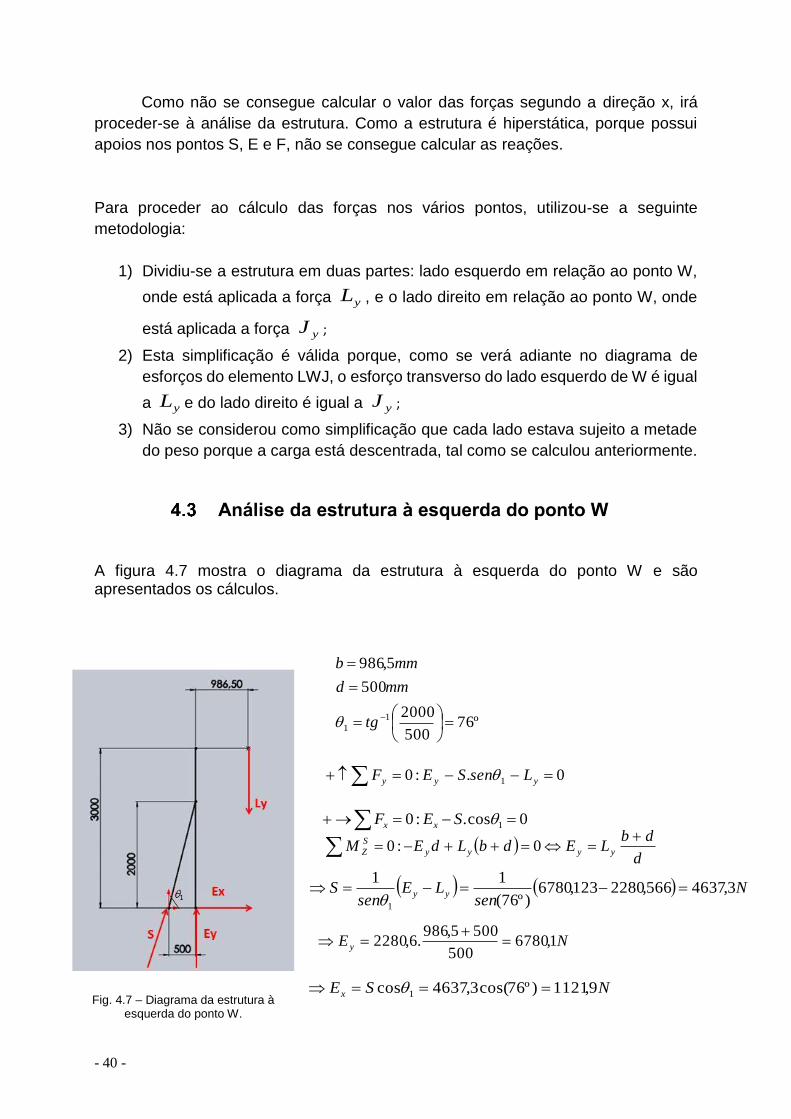
- 40 -
º76500
2000
500
5,986
1
1
tg
mmd
mmb
0.:0 1 yyy LsenSEF
d
dbLEdbLdEM yyyy
S
Z 0:0
Nsen
LEsen
S yy 3,4637566,2280123,6780)º76(
11
1
0cos.:0 1 SEF xx
Fig. 4.7 – Diagrama da estrutura à esquerda do ponto W.
Como não se consegue calcular o valor das forças segundo a direção x, irá
proceder-se à análise da estrutura. Como a estrutura é hiperstática, porque possui
apoios nos pontos S, E e F, não se consegue calcular as reações.
Para proceder ao cálculo das forças nos vários pontos, utilizou-se a seguinte
metodologia:
1) Dividiu-se a estrutura em duas partes: lado esquerdo em relação ao ponto W,
onde está aplicada a força yL , e o lado direito em relação ao ponto W, onde
está aplicada a força yJ ;
2) Esta simplificação é válida porque, como se verá adiante no diagrama de
esforços do elemento LWJ, o esforço transverso do lado esquerdo de W é igual
a yL e do lado direito é igual a yJ ;
3) Não se considerou como simplificação que cada lado estava sujeito a metade
do peso porque a carga está descentrada, tal como se calculou anteriormente.
A figura 4.7 mostra o diagrama da estrutura à esquerda do ponto W e são apresentados os cálculos.
NE y 1,6780500
5005,986.6,2280
NSEx 9,1121)º76cos(3,4637cos 1

- 41 -
MPaPa 2,5102,510900
3,4637 6
6
842,5
435
ySn
2
2
L
EIPcr
444 3075004050
12
1mmI
6,313,4637
4,146389
S
Pn cr
Fig. 4.8 – Diagrama do elemento SR.
De seguida, procede-se à análise de cada elemento.
O elemento SR é analisado como uma barra sujeita à tração e à compressão, ver
figura 4.8.
O perfil é tubular com
Como o elemento é uma barra que está sujeita à tração e à compressão é
necessário verificar se este instabiliza.
O cálculo da instabilidade do elemento é feito utilizando a equação de
instabilidade de Euler.
O elemento SR nunca instabiliza quando sujeito a este carregamento.
A
R
Sn
NSR
y
Segurança
3,4637
222 9004050 mmA
mmL 6,20615002000 22
RSPcr ,4,146389
106,2061
103075001020523
1292
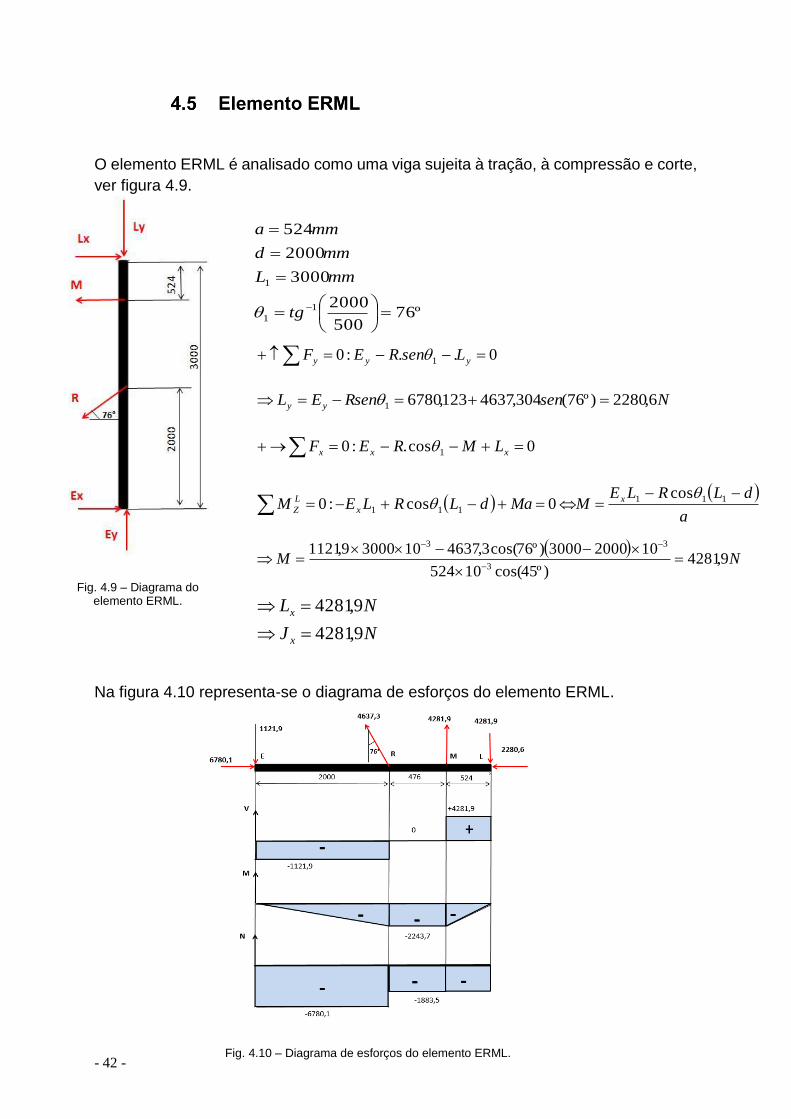
- 42 -
º76500
2000
3000
2000
524
1
1
1
tg
mmL
mmd
mma
0..:0 1 yyy LsenREF
0cos.:0 1 xxx LMREF
a
dLRLEMMadLRLEM x
x
L
Z
111
111
cos0cos:0
Fig. 4.9 – Diagrama do elemento ERML.
Fig. 4.10 – Diagrama de esforços do elemento ERML.
O elemento ERML é analisado como uma viga sujeita à tração, à compressão e corte,
ver figura 4.9.
Na figura 4.10 representa-se o diagrama de esforços do elemento ERML.
NsenRsenEL yy 6,2280)º76(304,4637123,67801
NM 9,4281
)º45cos(10524
1020003000)º76cos(3,46371030009,11213
33
NJ
NL
x
x
9,4281
9,4281

- 43 -
2MNVM
VM
ySn
A
NN
I
yMM
.
222 9004050 mmA
mmy
mmI
25
307500405012
1 444
A secção crítica é a secção R
Como 106050
3000
b
L tensão devido ao esforço transverso,
V , pode ser
desprezada.
O elemento possui um perfil tubular 50x50x5mm.
O cálculo da instabilidade do elemento é feito utilizando a equação de
instabilidade de Euler.
Logo, o elemento não instabiliza para esta carga.
MPaPaN 5,7105,710900
1,6780 6
6
MPaPaM 4,182104,18210307500
10257,2243 6
12
3
MPaMNVM 9,1894,1825,722
3,29,189
435
VM
ySn
N
L
EIPcr
3,69128103000
103075001020523
1292
2
2
2,101,6780
3,69128
N
Pn cr
NN
NmM
NV
1,6780
7,2243
9,1121

- 44 -
O elemento LWJ é analisado como uma viga sujeita à tração e ao corte. Como já
se obteve o valor de xJ , apresenta-se na figura 4.11, o diagrama de esforços do
elemento LWJ.
A secção crítica é a secção W.
Como 105050
2500
b
L, pode-se desprezar a tensão devido ao esforço
transverso, V .
As tensões tangenciais devido à torção de uma barra de secção retangular
distribuem-se no plano da secção transversal de uma forma mais complexa, quando
comparada à distribuição das tensões no caso da torção de veios de secção circular,
assim, não se pode admitir que a secção se mantém plana depois de a peça estar
torcida. A simetria da figura apenas permite presumir que, no centro da secção (eixo
da barra), a tensão será nula. Nas quinas da barra (pontos mais afastados do centro),
mNM
NV
z
y
.8,2249
6,2280
mNT
NN
.7,44
9,4281
Fig. 4.11 – Diagrama de esforços do elemento LWJ.

- 45 -
208,01 b
h
Fig. 4.12 – Esquema das tensões de corte, num elemento de secção retangular, devido à torção. [12]
Fig. 4.13 – Esquema das tensões de corte, devido à torção, nulas nos cantos de um
elemento de secção retangular. [12]
Tabela 5 – Coeficientes para o cálculo da tensão de corte devido à torção de um elemento de secção retangular. [12]
ao contrário do que se poderia inicialmente presumir, quanto a serem elevadas as
tensões, serão elas também nulas. O valor da tensão de corte máxima devido à torção
ocorre nos pontos médios do lado maior de uma secção retangular, ver figuras 4.12 e
4.13.
Não existe um valor exato para o cálculo da torção para um elemento com
secção quadrada, por isso recorreu-se à literatura, ver referência [12]. A tabela 5
apresenta os valores dos coeficientes para o cálculo da tensão de corte.
Para
As tensões devido à torção e ao momento fletor são máximas na superfície da
secção:
MPahb
TT 4,3
104040208,0
7,44922
MPaA
NN 8,4
10900
9,42816

- 46 -
mmL 2500
Fig. 4.14 – Diagrama do elemento MN.
MPa
I
yM
ZZ
Z
M 9,18210307500
10258,224912
3
MPaTMNVM 8,1874,339,1828,43 2222
3,28,187
435
VM
ySn
Logo, o elemento está bem dimensionado para esta carga.
O elemento MN é tratado como uma barra, pois apenas está sujeito a tração e
compressão, ver figura 4.14.
O cálculo da instabilidade do elemento é feito utilizando a equação de
instabilidade de Euler.
Logo, o elemento não instabiliza para esta carga.
NMN 9,4281
MPaA
N8,4
10900
9,42816
4,91
8,4
435
ySn
N
L
EIPcr
8,99544102500
103075001020523
1292
2
2 2,239,4281
8,99544
N
Pn cr

- 47 -
NFFJNF xxxx 00:0
Fig. 4.15 – Diagrama do elemento JQF.
O elemento JNF é analisado como uma viga sujeita à tração, à compressão e
corte, ver figura 4.15.
Na figura 4.16 representa-se o diagrama de esforços do elemento JNF.
Fig. 4.16 - Diagrama de esforços do elemento JNF.
A secção crítica é a secção N
NFJFF yyyy 5,14860:0
NN
NmM
NV
5,1486
7,2243
9,4281

- 48 -
Como 106050
3000
b
L, pode-se desprezar a tensão devido ao esforço
transverso, V .
O cálculo da instabilidade do elemento é feito utilizando a equação de
instabilidade de Euler.
O elemento não instabiliza para esta carga.
Além dos elementos acima referidos, a estrutura possui mais dois apoios
laterais, para diminuir o efeito de buckling, e uma viga em baixo para suportar os
trincos. Estes elementos não foram incluídos nas análises acima para tornar a
estrutura isostática. Como se concluiu que os elementos acima referidos cumprem os
requisitos de segurança, a adição destes elementos reforça a estrutura, pelo que se
garante o seu sobredimensionamento.
Tal como já foi referido, a ligação do TR à barra das 12h é feita através de
pinos. É importante determinar se estes aguentam os esforços a que o TR está sujeito
de modo a evitar que uma das ligações colapse e o TR caia no chão.
Os pinos são elementos que apenas estão sujeitos a esforços de corte. No caso
do banco de ensaio, esses esforços apenas se devem ao peso do TR. Como existem
MPaA
NN 7,1
10900
5,14866
MPa
I
yM
zz
zM 4,182
10307500
10257,224312
3
MPaMNVM 4,1844,1827,122
4,24,184
435
VM
ySn
N
L
EIPcr
4,69128103000
103075001020523
1292
2
2 5,46
5,1486
4,69128
N
Pn cr

- 49 -
sy
S
Sn
3
y
sy
SS
3 hinges em cada metade, considera-se o pior caso: o lado direito porque é o mais
pesado.
A força aplicada em cada hinge do lado direito é:
, utilizando o critério de von Mises,
Pode-se concluir que os pinos aguentam os esforços exercidos pelo TR.
5. Nota de cálculo das ligações soldadas através do método AWS
Neste capítulo apresenta-se a análise das ligações soldadas e faz-se o cálculo
da sua segurança. Essa análise é feita através do código AWS utilizando a norma
AISC para determinar a dimensão do cordão de soldadura.
Nesta parte do projeto temos como objetivo fazer o cálculo teórico da dimensão
do cateto da soldadura, h, em função dos limites impostos pelas propriedades do
material e da área da soldadura.
Para este cálculo assumiu-se uma soldadura de topo, toda a volta, tal como foi
feito no banco de ensaio, para que se garanta uma segurança elevada.
Esforços:
O esquema do cordão de soldadura e aplicação de esforços no centro
geométrico da soldadura e a soldadura na estrutura são apresentados nas figuras 5.1,
5.2 e 5.3.
NLV xz 9,4281
NW
F Direitocorte 2,608
3
81,9198
3
222
1,1134
12
4mm
DAcorte
MPaA
F
corte
corte 4,51,113
2,608
8,254,53
240
Sn

- 50 -
A
Vzz
MPaS y 1744354.04.0
Fig. 5.1 – Esquema do cordão de soldadura no ponto L.
Fig. 5.3 – Imagem do cordão feito na estrutura no ponto L.
O cálculo anterior permite concluir que a soldadura apresenta segurança devido
ao facto de o cateto necessário ser muito pequeno quando comparado com a
espessura do tubo (5mm). Por este motivo, o cateto da soldadura deve ter a espessura
do tubo.
Para este cálculo assumiu-se uma soldadura de topo toda a volta, tal como foi
feito no banco de ensaio, para que se garanta uma elevada segurança.
Esforços:
O esquema do cordão de soldadura e aplicação de esforços no centro
geométrico da soldadura e a soldadura na estrutura são apresentados nas figuras 5.4,
5.5 e 5.6.
mmd
mmb
c
c
50
50
mmdbL ccc 2002
2
222
cc
zzyx
Lh
V
cy
zcy
cc
z
LS
VhS
Lh
V
4.04.0
mmhc 12004354.0
9,4281
NsenRV yy 6,4499º763,4637
ccc LhA
Fig. 5.2 – Esquema de soldadura no ponto L.

- 51 -
Fig. 5.4 – Esquema do cordão de soldadura no ponto R.
Fig. 5.6 – Imagem do cordão feito na estrutura no ponto R.
Fig. 5.7 – Esquema do cordão de soldadura no ponto J.
Fig. 5.9 – Imagem do cordão feito na estrutura
no ponto J.
O cálculo anterior permite concluir que a soldadura apresenta segurança devido
ao facto de o cateto necessário ser muito pequeno quando comparado com a
espessura do tubo (5mm). Por este motivo, o cateto da soldadura deve ter a espessura
do tubo.
Para este cálculo assumiu-se uma soldadura de topo toda à volta, tal como foi
feito no banco de ensaio, para que se garanta uma elevada segurança.
Esforços:
O esquema do cordão de soldadura e aplicação de esforços no centro
geométrico da soldadura e a soldadura na estrutura são apresentados nas figuras 5.7,
5.8 e 5.9.
mmd
mmb
c
c
7,206
50
mmdbL ccc 4,5132
c
y
yA
V
ccc LhA
cy
y
cLS
Vh
4.0 mmhc 1
2004354.0
6,4499
NJV xz 9,4281
Fig. 5.5 – Esquema da soldadura no ponto R.
Fig. 5.8 – Esquema da soldadura no ponto J.

- 52 -
Fig. 5.12 – Imagem do cordão feito na hinge.
O cálculo anterior permite concluir que a soldadura apresenta segurança devido
ao facto de o cateto necessário ser muito pequeno quando comparado com a
espessura do tubo (5mm). Por este motivo, o cateto da soldadura deve ter a espessura
do tubo.
De seguida procede-se ao cálculo do cordão a utilizar em uma hinge do TR.
Como o TR possui 6 hinges (3 para o lado direito e 3 para o lado esquerdo), considera-
se para este cálculo que cada hinge suporta um terço do peso da metade direita e da
metade esquerda.
No primeiro caso, considera-se o conjunto do TR (Esquerdo e Direito), nos
seguintes, irá considerar-se apenas o lado direito, pois irá provocar maior torção do
que o conjunto.
O esquema do cordão de soldadura e aplicação de esforços no centro
geométrico da soldadura e a soldadura na estrutura são apresentados nas figuras
5.10, 5.11 e 5.12.
Esforços:
mmd
mmb
c
c
50
50
mmdbL ccc 2002
ccc LhA mmh 1
2004354.0
9,4281
c
zz
A
V
cy
zc
LS
Vh
4.0
mNW
Vy .7,12553
0,3767
3
NmM
T t 9,143
7,44
3
J
Tz
A
V
c
y
y J
Tyz
Fig. 5.10 – Esquema do cordão de soldadura na hinge (TR direito e
esquerdo)
Fig. 5.11 – Esquema da soldadura na hinge (TR direito e esquerdo).

- 53 -
Propriedades de Área
O ponto mais crítico é o ponto C porque está sujeito a uma maior tensão. O
cálculo anterior permite concluir que a soldadura apresenta segurança devido ao facto
de o cateto necessário ser muito pequeno quando comparado com a espessura do
tubo (5mm). Por este motivo, o cateto da soldadura deve ter a espessura do tubo.
De seguida procede-se à análise da soldadura das sapatas onde se colocam
as patolas do empilhador. As sapatas vão estar sujeitas à força de tração que o
empilhador faz ao levantar a estrutura e à flexão devido ao peso da estrutura.
O peso e a localização do centro de massa da estrutura foram calculados
utilizando o programa Solidworks. Será tido como uma aproximação, mas suficiente
para este estudo. O COG é calculado pelo SW em relação ao referencial do desenho
(X,Y;Z), no caso da direção segundo X, a distância é de 71,8mm. A estrutura tem uma
massa de 502kg, ver figura 5.13.
ucc AaA
uc JaJ
mmbd
dy
cc
c 7,1382502
50
2
22
mmd
mmb
c
c
50
82
mmbdA ccu 182825022
3
223223
26304050282
508250
12
50282
212
2mm
db
dbddbJ
cc
ccccc
u
y
uuu
y
c
zy
y
S
J
Ty
J
Tz
A
V
aS
4,0
4,0
22
222
Fig. 5.13 - COG do banco de ensaio.

- 54 -
Fig. 5.14 - Esquema do cordão de soldadura das sapatadas para o
empilhador.
Fig. 5.16 - Imagem do cordão feito nas sapatas para o empilhador.
Como existem duas sapatas, considera-se que o peso exercido em cada uma
delas corresponde a metade do peso da estrutura e a força de tração é metade. O
esquema do cordão de soldadura e aplicação de esforços no centro geométrico da
soldadura e a soldadura na estrutura são apresentados nas figuras 5.14, 5.15 e 5.16.
Propriedades de Área:
Esforços (por patola):
Os pontos mais críticos são os pontos A e D porque estão sujeitos a uma maior
tensão. O cálculo anterior permite concluir que a soldadura apresenta segurança
devido ao facto de o cateto necessário ser muito pequeno quando comparado com a
espessura do tubo (5mm). Por este motivo, o cateto da soldadura deve ter a espessura
do tubo.
zz
zx
I
yM .
3
333
7,868332396
50
6
8,561502,388
6
1150mmI
uzz
NmdW
M Estruturaz 2,2420108,711,4089,502
2
81,90,502
2
3
mmAu 3806050802
mm
L
Lyy
c
c
COG 1,647605080
603050258,5616080401150
Fig. 5.15 - Esquema da soldadura das sapatas para o empilhador.
y
uzz
z
c
y
x
S
I
yM
aS 4,04,0
22

- 55 -
Fig. 6.1 - Resultados análise FEM (Tensões
de von Mises). Fig. 6.2 - Resultados análise FEM
(deslocamentos).
6. Simulações
Antes da construção da estrutura, foram testadas várias hipóteses utilizando o
programa SolidWorks que permite fazer a modelação da estrutura em CAD e a
simulação das tensões e deformações a que estrutura é sujeita utilizando o pacote
Simulation. Os resultados que foram sido obtidos ajudaram a definir a forma que a
estrutura teria e quais os locais que poderiam ser melhorados. A estrutura que foi
apresentada anteriormente é o resultado de várias simulações, pelo que só serão
apresentados os resultados finais.
Além disso, depois de terem sidos efetuados os cálculos teóricos, é
interessante fazer a sua comparação com um software de elementos finitos.
Estas análises são feitas submetendo a estrutura ao peso do TR. Tal como já
foi referido, como não se teve acesso aos desenhos de CAD do TR e como este é um
componente complexo a nível dimensional e de constituição, simplificou-se a análise
utilizando uma barra prismática com a dimensão que suportam as hinges no TR e
aplicou-se uma carga distribuída equivalente ao peso de cada metade.
Além do carregamento, também é importante definir os constrangimentos
físicos do sistema. Como o banco de ensaios vai ser fixado ao chão, utilizou-se um
encastramento na análise para impedir o deslocamento e a rotação da base da
estrutura.
A primeira análise consiste em simular a estrutura sujeita ao peso do conjunto
completo (metade direita e metade esquerda). Esta análise permite simular a
deformação que a estrutura sofre quando sujeita ao carregamento máximo, ver figuras
6.1 e 6.2.

- 56 -
O valor de tensão equivalente de von Mises máximo obtido pela análise de
elementos finitos foi de 76,3 MPa. O coeficiente de segurança é:
7,53,76
435
VM
YSn
Como se pode concluir a partir das análises, a estrutura está sujeita a uma
tensão muito inferior à tensão de cedência e a sua deformação é muito pequena. O
valor da tensão obtido pelo programa de elementos finitos é inferior ao que foi obtido
pela análise estática devido ao facto dessa análise apenas considerar uma carga
pontual, enquanto o programa de elementos finitos considera que a carga está
distribuída nas três hinges e que a estrutura deforma de modo diferente nas várias
secções.
Além disso é importante referir que nenhum dos casos anteriores entrou em
conta com o aumento de resistência que a soldadura dos componentes irá trazer à
estrutura. Assim, poderá deduzir-se que a estrutura ainda irá deformar menos do que
foi previsto pelo modelo de elementos finitos.
7. Desenvolvimento do Sistema Hidráulico
Nesta parte da tese procede-se à análise detalhada do sistema hidráulico do
TR e ao dimensionamento e escolha de um grupo de potência hidráulico.
O TR do modelo CFM56-5B possui quatro cilindros que são atuados
hidraulicamente e que permitem a abertura e o fecho das pivoting doors. O sistema
hidráulico é controlado pela HCU que em funcionamento normal controla o lado direito
e o lado esquerdo do TR.
Na parte introdutória fez-se referência aos vários componentes hidráulicos,
elétricos e às suas funções. Neste capítulo será feita uma explicação mais detalhada
do funcionamento hidráulico para que seja mais fácil explicar as várias opções que
foram tomadas para fazer o teste do lado direito e esquerdo isoladamente.
Depois de todas a condições de abertura do TR terem sido verificadas pelos
computadores do avião, este envia um sinal à SOV e ela abre. O TR apenas recebe
fluido através dessa válvula, assim, caso haja a necessidade de cortar o fornecimento
de fluido, a principal medida é fechar a SOV.

- 57 -
Fig. 7.1 – Esquema da HCU em stow mode. [3] Fig. 7.2 – Esquema da HCU de stow mode para deploy mode. [3]
1. Quando o sistema está em stow mode
As válvulas de solenoide 1 e 2 não recebem energia, pois esferas 1 e 2 são
mantidas no fundo de cada válvula de solenoide, mantendo as válvulas fechadas e
impedindo que o fluido hidráulico circule até aos trincos.
A pressão hidráulica é parada pela esfera 1 da válvula de solenoide e pela
válvula 1 por não ter atingido os 3000psi, ver figura 7.1.
2. Sistema a ir de stow mode para deploy mode
As válvulas de solenoide recebem energia, as esferas são movidas da base,
permitindo que o fluido hidráulico circule até atingir os 3000psi, o que permite a sua
passagem pela válvula 1. Depois do fluido passar pelo pressure switch, este envia um
sinal a dar a indicação de que o sistema está pressurizado. O fluido sai da HCU, segue
em direção aos trincos que, depois de estarem abertos, retorna à HCU e move a
válvula distribuidora que é pilotada hidraulicamente. Depois da válvula distribuidora
mudar de posição, o fluido avança em direção aos atuadores e fá-los avançar. Este é
um sistema de segurança que impede que o fluido faça avançar os atuadores sem
que os trincos estejam desbloqueados, ver figura 7.2.
3. Sistema em deploy mode
Para manter o TR em deploy mode, basta deixar de fornecer energia à válvula
de solenóide 1, ver figura 7.3.

- 58 -
Fig. 7.3 – Esquema da HCU em deploy mode. [3] Fig. 7.4 – Esquema da HCU de deploy mode para stow mode. [3]
4. Sistema de Deploy Mode para Stow Mode
Para que o TR regresse à posição de stow, fornece-se energia à válvula de
solenoide 1 e deixa-se de fornecer energia à válvula de solenoide 2. Isto permite que
o fluido que circule dentro da HCU apenas possa seguir em direção aos atuadores
para fazer o seu recuo já que a válvula distribuidora foi deixada na nessa posição, ver
figura 6.4.
O principal objetivo do banco de ensaio é fazer o teste de cada metade, em
separado, do TR. Como se referiu anteriormente, a HCU, que se localiza no lado
direito, comanda ambos os lados. Assim, o lado direito é considerado o mestre e o
lado esquerdo considera-se escravo.
Por esse motivo, o banco de testes deverá ser adaptado a cada um dos casos:
apenas metade direita (com HCU) e apenas metade esquerda (sem HCU).
Apenas o lado direito (com HCU)
Quando se está a testar apenas o lado direito, o modo de funcionamento do
sistema hidráulico será parecido ao do conjunto devido à existência da HCU. Por esse
motivo, apenas se deverá proceder às seguintes alterações no sistema:
1) A ligação dos trincos, que é feita em série, não será feita ao lado esquerdo. Os
dois trincos do lado direito são ligados um ao outro e a ligação que seria feita

- 59 -
ao lado esquerdo não é feita e o último trinco do lado direito é ligado à HCU,
fechando o circuito.
2) Não é feita a ligação aos atuadores do lado esquerdo. Em condições normais,
a ligação dos atuadores é feita em paralelo, para que atuem em simultâneo.
Neste caso, apenas serão ligados os atuadores do lado direito.
Apenas o lado esquerdo (sem HCU)
Tal como já foi referido, o lado esquerdo não possui a HCU, pelo que se deverá
encontrar uma solução de forma a resolver este problema.
A solução passa pela compra de componentes individuais que simulem o
funcionamento da HCU. De modo semelhante à opção anterior, seriam utilizadas duas
válvulas distribuidoras, uma para os trincos e outra para os atuadores, para que se
garanta o funcionamento correto do sistema e a segurança durante o processo. A
única desvantagem relativamente à opção anterior é que é uma solução menos
compacta, pois teria de se fazer mais ligações entre os componentes. A principal
vantagem é o preço, pois estes componentes mais simples compensam mais em
relação a uma unidade mais complexa.
Para fazer o dimensionamento do equipamento hidráulico a utilizar, é necessário
calcular os parâmetros físicos que caracterizam esse equipamento. Segundo o
manual da Goodrich a unidade de potência hidráulica deve:
1. Fornecer uma pressão de 3000psi (206bar) ao sistema
2. Funcionar com fluido do tipo NSA-307-110 Type 4
3. Possuir um reservatório de 50l
4. Tempo máximo de avanço dos atuadores de 2s

- 60 -
4321 mmmmmB
smsmmv /13,0/1302
260
ABAB QQQQ 44
2222 234744
hdDA
gpmlpmsmQB 9,1017,41/10861,6101301023474
4 343622
A partir dessa informação, pode-se calcular os restantes parâmetros do sistema,
tais como o potência e caudal da bomba que são necessários.
O caudal da bomba é calculado através da equação da conservação de caudal
mássico entre a saída da bomba e os quatro atuadores:
Como estes avançam ao mesmo tempo e com a mesma velocidade,
Sabe-se que o tempo de atuação mínimo é 2 e que o curso do atuador é
L=260mm, pelo que se calcula a velocidade mínima de atuação:
A área em que o fluido exerce a sua pressão é igual à diferença entre o
diâmetro do pistão e a área da haste:
Assim, o caudal mínimo que a bomba deve fornecer é igual a:
Considera-se este caudal como sendo mínimo, pois os atuadores devem, no
pior do seu desempenho, avançar em dois segundos. Caso o caudal seja superior ao
que foi calculado, garante-se que estes cumprem o tempo de avanço exigido pelos
manuais de teste e funcionamento.
A bomba escolhida deverá ser uma bomba de caudal fixo e pressão regulável,
para permitir que se façam testes ao sistema com pressões abaixo dos 3000psi.
Para contornar a válvula que só abre com 3000psi, pode-se fazer a ligação da
unidade hidráulica diretamente à tomada de pressão do atuador e começar com uma
pressão abaixo de 3000psi e ir aumentando gradualmente. Caso se verifique que a
estrutura reage de acordo com o esperado, então poderá ser feito o teste do sistema
hidráulico completo, pois é a atuação dos cilindros hidráulicos que dita se o sistema
funciona.

- 61 -
No cálculo da potência da bomba, considera-se que esta deve fornecer fluido
aos atuadores e aos componentes que estão mais elevados, neste caso, a HCU.
Como o cálculo é feito considerando o equipamento no solo, a altura da bomba, Hb,
será igual à altura da HCU de 3m. Além disso, considera-se um rendimento de 95%
para bomba que é o mais usual.
O fluido que é utilizado no sistema hidráulico do avião é do tipo NSA-307-110
Type 4. Este tipo de fluido é do tipo utilizado em aviação pelo facto de possuir uma
densidade variável com temperatura, o que permite uma redução de peso durante o
voo, e ser resistente ao fogo. Pelo facto de ser do tipo éster-fosfatado, deve ter-se um
cuidado especial no seu manuseio pois é corrosivo e poderá causar danos na
estrutura do TR caso haja um derrame. Este fluido é nocivo para o sistema respiratório
e poderá causar lesões em caso de contacto com a pele, pelo que deverão ser
tomados cuidados especiais quando utilizado tal como a utilização de luvas e
máscara.
O fluido utilizado pela TAP Portugal é da marca Skydrol e pode ser de dois
tipos: Skydrol LD-4, aconselhado para voo, e Skydrol 500B-4, aconselhado para
ensaios em bancos de teste, pelo que se irá utilizar este último. A tabela no anexo
apresenta as várias propriedades destes dois fluidos.
A escolha do grupo de potência hidráulica foi feita recorrendo a empresas
especializadas em equipamento hidráulico. Das várias empresas contactadas, a
empresa Movicontrol respondeu ao contacto e sugeriu um grupo de potência
hidráulico com as seguintes características:
1. Depósito: 70l
2. Bomba de débito fixo: 47l/min
WQgH
P BBB 042,21
95,0
10861,6381,9990 4

- 62 -
3. Pressão: até 210bar
4. Motor elétrico trifásico de 11kW.
O equipamento sugerido cumpre os requisitos para o ensaio do conjunto do
TR. Como já foi referido, o ensaio das duas metades do TR em simultâneo é uma
situação pouco comum.
Conclui-se que a unidade de potência hidráulica escolhida pode ser utilizada
para o ensaio de apenas uma das metades do TR.
8. Desenvolvimento do Sistema Elétrico
Nesta secção será feita a análise em detalhe do sistema elétrico que comanda o
TR e será proposto um sistema que permita a atuação do sistema hidráulico e que
dê a informação do estado do TR.
O TR é controlado através de um sistema chamado ECU que recebe e envia
informação do e para o TR. A ECU é uma das várias unidades do avião que possuem
microprocessadores que comandam os vários componentes.
A ECU envia e recebe sinais de 28V DC através de dois canais A e B para o TR.
A utilização de um sistema analógico de 28V DC deve-se a motivos históricos, pois as
baterias dos aviões utilizadas funcionavam com 28V DC. Como os aviões possuem
componentes sistemas elétricos complexos, é mais fácil continuar com os mesmos
sistemas analógicos pois garantem o seu funcionamento correto em vez da sua
substituição por sistemas digitais, o que implicaria um maior investimento para
modificar os esquemas das ligações.
A utilização de um canal A e de um canal B é considerada um fail safe system, ou
seja, estes dois canais independentes recebem e emitem exatamente a mesma
informação entre a ECU e o TR para o caso de um falhar, permanecendo o outro
operacional.

- 63 -
8.2.1 Stow switch e deploy switch
Tal como já foi referido, o TR atuado hidraulicamente apenas transmite informação
de fim de curso à ECU, ou seja, quando está totalmente atuado ou não atuado.
A informação de fim de curso é transmitida através do stow switch, quando o TR
está fechado, e do deploy switch, quando o TR está totalmente atuado. Quando o TR
chega ao início ou ao fim de curso, este toca na alavanca do switch, que está acoplada
a um sistema de mola que fornece energia a uma célula piezoelétrica que transmite
um sinal elétrico através de uma saída com pinos.
Existem quatro stow switches que estão ligados em série para que seja dada a
informação ao FADEC de que o TR está fechado apenas quando todos os switches
tiverem sido energizados. Estes switches funcionam com uma tensão de 28V DC e
corrente de 10mA e possuem 12 pinos.
A tabela 6 representa o funcionamento do stow switch consoante os pinos que
estão energizados:
Stow Switch
Posição Ativa
Posição Inativa
Existe continuidade elétrica entre os pinos
Canal A 2, 5 2, 3
Canal B 4, 9 4, 7
Não existe continuidade elétrica
entre os pinos
Canal A 2, 3
2, 5
Canal B 4, 7 4, 9
Tabela 6 – Funcionamento do stow switch
As figuras 8.1, 8.2 e 8.3 representam o funcionamento do stow switch de forma
esquemática.
(a) Fig. 8.2 – Representação
esquemática do Stow Switch. [3] Fig. 8.1 – Stow Switch na
posição ativa. [3]
Fig. 8.3 – Stow switch na posição inativa. [3]

- 64 -
O sinal que sai dos pinos 2,3 e 5 está associada ao canal A, enquanto o sinal
que sai dos pinos 4, 7 e 9 está associada ao canal B. Os pinos 1 e 12 funcionam como
neutro (terra).
Existem dois deploy switches que estão ligados em paralelo para que seja dada
a informação ao FADEC de que o TR está aberto mesmo que esteja apenas um dos
switches energizados. Estes switches funcionam com uma tensão de 28V DC e
corrente de 10mA e possuem 5 pinos, incluindo o neutro.
A tabela 7 representa o funcionamento do deploy switch consoante os pinos
que estão energizados:
Deploy Switch
Posição Ativa Posição Inativa
Existe continuidade elétrica entre os pinos
Canal A 2, 3
-
Canal B 4, 5 -
Não existe continuidade elétrica entre os pinos
Canal A - 2, 3
Canal B - 4, 5
Tabela 7 – Funcionamento do deploy switch
As figuras 8.4, 8.5 e 8.6 representam o funcionamento do deploy switch
de forma esquemática.
O sinal que sai dos pinos 2 e 3 está associada ao canal A, enquanto o sinal que
sai dos pinos 4 e 5 está associada ao canal B. O pino 1 funciona como neutro.
Fig. 8.4 – Representação esquemática do deploy switch. [3]
Fig. 8.5 – Deploy switch na
posição inativa. [3]
Fig. 8.6 – Deploy switch na
posição ativa. [3]

- 65 -
8.2.2 Pressure Switch
O pressure switch é um interruptor de pressão que está localizado na HCU e
envia um sinal elétrico assim que o sistema hidráulico atinge os 206bar. Este
interruptor possui um pistão no seu interior que se move quando recebe pressão,
aciona um micro-switch que energiza uma célula piezoelétrica e esta envia um sinal
elétrico ao computado a informar que o sistema recebeu pressão. Tal como o deploy
e o stow switch, também o pressure switch envia informação consoante os pinos que
foram energizados.
A tabela 8 representa o funcionamento do pressure switch consoante os pinos
que estão energizados:
Pressure Switch
Posição Ativa Posição Inativa
Existe continuidade elétrica entre os pinos
Canal A 2, 3
-
Canal B 4, 5 -
Não existe continuidade elétrica entre os pinos
Canal A - 2, 3
Canal B - 4, 5
Tabela 8 – Funcionamento do pressure switch
As figuras 8.7, 8.8 e 8.9 representam o funcionamento do pressure switch de
forma esquemática.
Fig. 8.8 – Representação
esquemática do pressure switch. [3]
Fig. 8.7 – Pressure switch na posição
inativa. [3] Fig. 8.9 – Pressure switch na posição ativa. [3]

- 66 -
O sinal que sai dos pinos 2 e 3 está associada ao canal A, enquanto o sinal
que sai dos pinos 4 e 5 está associada ao canal B. O pino 1 funciona como neutro.
8.2.3 Solenoid Shut-off/ Isolation Valve e Deploy Solenoid Valve
A solenoid shut-off valve e a deploy solenoid valve são duas válvulas
direcionais de 3/2 que se localizam na HCU e que o controlam a direção do fluido no
sistema hidráulico quando recebem sinais elétricos.
Estas válvulas possuem uma haste com uma esfera na ponta e um solenoide
em torno da haste. Quando o solenoide recebe um sinal elétrico, este desloca a haste
para cima, devido ao facto de se criar uma força eletromagnética no interior solenoide
que é suficiente para que este mova a esfera e permite a passagem de fluido
hidráulico.
Tal como os interruptores, também as válvulas solenoides enviam informação
consoante os pinos que foram energizados.
A tabela 9 representa o funcionamento das válvulas consoante os pinos que
estão energizados:
Tabela 9 - Funcionamento das válvulas de solenoide.
É importante referir que este é mais um sistema de segurança existente no TR,
pois caso algum dos canais falhe, o sistema consegue sempre aceder às duas
válvulas direcionais, ver figura 8.10.
Válvulas de solenoide
Canal A Canal B
Shutt-off
Valve (1)
Deploy
Valve (2)
Shutt-off
Valve (1)
Deploy
Valve (2)
1 - - 1 - -
2 + C - 2 + A -
3 - D - 3 - B -
4 + - C 4 + - A
5 - - D 5 - - B
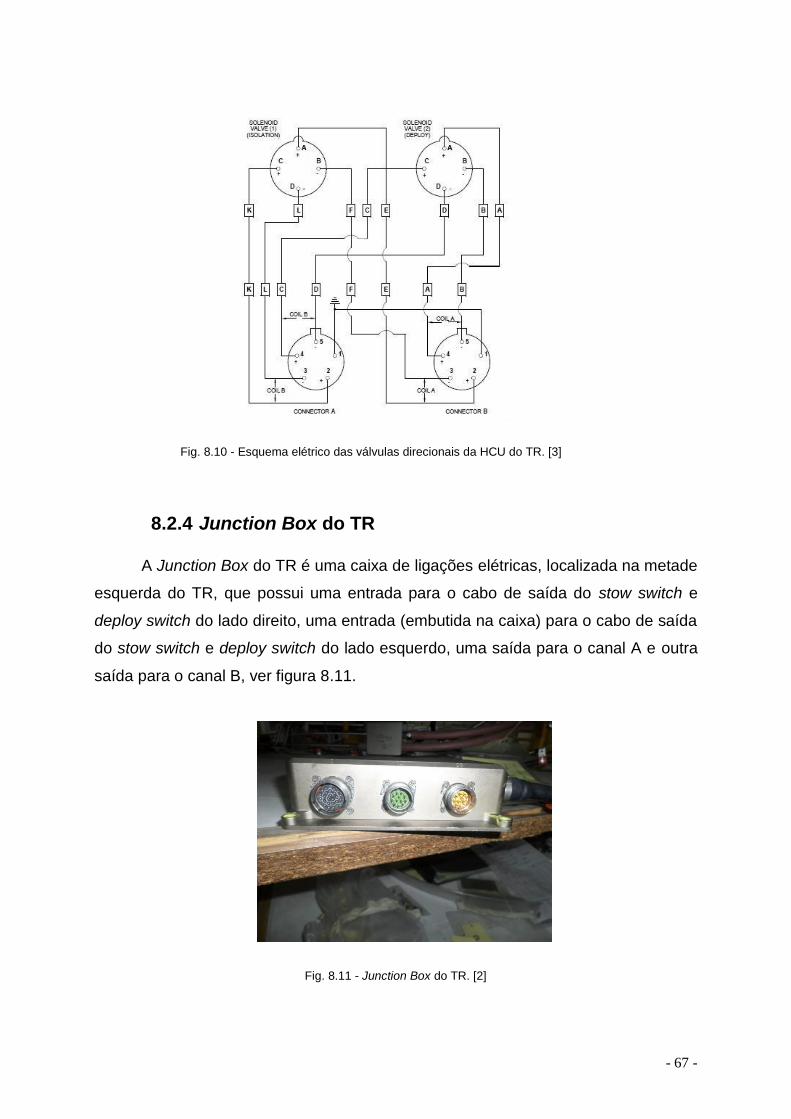
- 67 -
8.2.4 Junction Box do TR
A Junction Box do TR é uma caixa de ligações elétricas, localizada na metade
esquerda do TR, que possui uma entrada para o cabo de saída do stow switch e
deploy switch do lado direito, uma entrada (embutida na caixa) para o cabo de saída
do stow switch e deploy switch do lado esquerdo, uma saída para o canal A e outra
saída para o canal B, ver figura 8.11.
Fig. 8.10 - Esquema elétrico das válvulas direcionais da HCU do TR. [3]
Fig. 8.11 - Junction Box do TR. [2]
- 68 -
8.2.5 Junction Box do Motor
A Junction Box do Motor é uma caixa de ligações elétricas, localizada no motor
do avião, que possui uma entrada para cada um dos seguintes cabos: saída do canal
A da junction box do TR, saída do canal B da junction box do TR, saída do canal A
das válvulas de solenoide da HCU, saída do canal B das válvulas de solenoide da
HCU, saída do canal A do pressure switch, saída do canal B do pressure switch, saída
do canal A do sensor de combustível do motor e saída do canal B do sensor de
combustível do motor. Esta junction box possui uma saída para o canal A e outra saída
para o canal B que vão ser ligadas à ECU. O esquema elétrico de todo o TR está
localizado em Anexo.
Após a explicação anterior, fica mais fácil compreender que o sistema de controlo
deverá simular os sinais elétricos enviados de e para cada metade do TR através dos
canais A e B.
Para tornar o sistema simples, optou-se por não utilizar a rede elétrica já existente
pois isso implicaria ter de utilizar a junction box do TR, a junction box do motor e fazer
vários bypasses para contornar a interdependência do sistema elétrico do lado direito
e do lado esquerdo.
A solução que foi encontrada consiste na fabricação de uma rede elétrica
independente para o teste do lado direito e outra para o lado esquerdo. Assim, apenas
serão necessários os plugs que ligam os cabos elétricos às entradas dos
componentes elétricos. Esta solução é vantajosa na medida que se aproveita o
mesmo esquema elétrico para ambos os lados e simplifica-se o funcionamento do
teste. Por outro lado, apresenta como desvantagem o facto de não se simular a
interdependência dos dois sistemas mesmo que um deles não esteja presente, mas
isso não é o mais importante já que, tal como já foi referido, o principal objetivo é fazer
a reparação de uma metade, mesmo que isso implique apenas utilizar comandos
simples de abertura e fecho sem a complexidade do sistema em funcionamento real.
Esse teste será feito obrigatoriamente quando o TR estiver montado no avião.
- 69 -
O banco de ensaio deverá cumprir os seguintes requisitos:
1. Funcionar com uma tensão de 28V DC
2. Deve possuir uma lâmpada âmbar para quando o TR está modo stow
3. Deve possuir uma lâmpada verde para quando o TR está modo deploy
4. Deve possuir uma lâmpada vermelha para os seguintes casos:
4.1 – sistema ligado / desligado (ON/OFF)
4.2 – sistema entre stow e deploy (informativo)
4.3 – shut-off solenoid valve atuada
4.4 – deploy solenoid valve atuada
4.5 – pressure switch atuado
4.6 – canal A selecionado
4.7 – canal B selecionado
5. Deve permitir o teste do lado direito (com HCU e sem junctiox box do TR) e do
lado esquerdo (sem HCU e com junction box do TR)
6. Permitir utilizar redes elétricas (cablagem) independentes:
6.1 – Simular que o lado direito do TR está a funcionar corretamente quando
se testa apenas o lado esquerdo;
6.2 – Simular que o lado esquerdo do TR está a funcionar corretamente quando
se testa apenas o lado direito;
Com base no que foi referido anteriormente, foi desenvolvido um esquema de
um circuito elétrico simples que permite fazer o controlo do TR.
Nesta parte do capítulo irá proceder-se à determinação da fonte de alimentação
necessária à utilização do sistema de controlo do banco de ensaio. Com base no
esquema elétrico, toma-se como simplificação o facto de apenas as lâmpadas
consumirem a maior parte da energia elétrica fornecida ao sistema, já que os relés e
as válvulas consomem muito pouca energia quando comparadas com as lâmpadas.
Para este cálculo, considera-se a situação mais extrema: todas as lâmpadas
acesas. Este é um caso extremo e que nunca irá acontecer, pois tomando como

- 70 -
exemplo o teste do canal A: quando a lâmpada referente a este canal se acende, a
lâmpada do canal B deverá estar necessariamente apagada.
Depois de se ter feito uma consulta, encontrou-se uma lâmpada com as
características apresentadas na tabela 10.
Equipamento Lâmpada
Fornecedor Robert Mauser
Tensão 28VDC
Corrente 40 mA
Tabela 10 – Características das lâmpadas.
Sabendo que a potência de uma lâmpada é dada por:
UIP
Como precisamos de 8 lâmpadas, a potência necessária é:
WNUIP 96.81040288 3
Sabendo que o sistema irá funcionar com 28V DC, as lâmpadas irão consumir
cerca de 9W e que a tensão da rede é de 220V AC, 50Hz, pode-se selecionar a
fonte de alimentação adequada para o sistema.
Após ter sido feito feita uma pesquisa, encontrou-se uma fonte de
alimentação com as características apresentadas na tabela 11.
Equipamento Fonte de Alimentação
Marca MeanWell
Potência 600W
Corrente Máx. 22.2A
Tensão (Entrada) 90-132 VAC / 180-246VAC (selecionável por interruptor)
Tensão (Saída) 28 VDC (24 a 32V ajustável)
Tabela 11 – Características da fonte de alimentação.
- 71 -
Além dos componentes já referidos, deverão ser utilizados os seguintes
componentes:
1) 3 Relés DPST: permitem direcionar a corrente elétrica consoante o sinal
elétrico enviado para a sua bobina.
2) 1 Interruptor came com 2 posições: para que o banco de ensaio teste o
sistema A ou B, consoante a seleção da posição.
3) 1 interruptor rotativo com 3 posições: para permitir selecionar stow, deploy
ou sistema desligado.
4) Adaptadores (plugs) para permitir a ligação da rede elétrica aos terminais
dos equipamentos com funções elétricas.
5) Cabos elétricos para fazer a ligação entre os componentes.
A descrição do funcionamento do equipamento elétrico no teste do TR
encontra-se nos anexos D e E.
9. Análise de Custos
Após se ter feito o dimensionamento do equipamento, deve-se fazer uma análise
de custos. Esta é uma das fases mais críticas do projeto, pois implica que se façam
escolhas na compra dos produtos com base na sua disponibilidade e preço nas
empresas de referência. A não disponibilidade de um componente ou o seu preço
elevado poderão implicar uma alteração numa das etapas anteriores para que o banco
de ensaio não fique demasiado caro.
Neste projeto devem ser considerados os custos associados aos materiais
comprados e à mão-de-obra.
Os custos associados aos materiais incluem os componentes metálicos que foram
utilizados na construção da estrutura, do equipamento de potência hidráulica, dos
componentes hidráulicos utilizados para a simulação da HCU e dos componentes
elétricos utilizados para o teste.
Os custos associados à mão-de-obra são relativos ao tempo que cada trabalhador
da Manutenção de Motores da TAP dispôs do seu horário de trabalho para se dedicar
ao banco de ensaios. Esse tempo deverá ser anotado e, como se sabe o custo hora-
homem, consegue-se determinar o custo associado à mão de obra. Estes custos

- 72 -
incluem a escolha de materiais nos armazéns, construção da estrutura (corte e
soldadura dos componentes) e construção do sistema elétrico.
Após o cálculo dos custos totais, soma dos custos associados aos materiais e da
mão-de-obra, estima-se que o banco de ensaios custe 8.000€ e pode-se concluir que
o banco de ensaio está dentro do custo que foi inicialmente orçamentado (10.000€).
10. Conclusão
Conclui-se que que a estrutura, os sistemas hidráulico e elétrico cumprem os
requisitos do projeto.
O teste pode ser feito a cada metade em separado, tal como era exigido.
Os ensaios que serão realizados no banco de teste irão agilizar a deteção e
reparação de falhas no Thrust Reverser, o que representa uma mais-valia para a TAP.
Todo o processo de cálculo teórico, escolha de materiais e análise de custos
culminou num projeto viável e que poderá ser continuado.
11. Desenvolvimento futuro
A minha contribuição para o banco de ensaio foi a do desenvolvimento do
conceito, análise estática, análise das ligações com pinos e soldadas e a escolha do
equipamento hidráulico e elétrico. Considero que esta é a fase inicial e que está
intimamente ligada à parte de projeto e fabricação a que me propus.
Tal como na vida real, todos os projetos não se limitam apenas ao seu projeto
e fabricação, pois existem os fatores que condicionam o funcionamento adequado
durante o seu tempo de vida.
Um desses fatores é o teste e utilização adequada do banco de ensaio. Por
esse motivo, sugiro que seja elaborado um manual de utilização e manutenção do
banco de ensaio. Este manual poderá servir como base para os próximos bancos de
ensaios que sejam utilizados na oficina de Manutenção.

- 73 -
12. Referências
[1] A. Silva, J. Dias, and L. Sousa, Desenho Técnico Moderno. 5ª Edição LIDEL, 2004. [2] ATA 78, TAP [3] CFM56-5B Goodrich A318-A319-A320-A321 – Nacelle System. Goodrich, 2014. [4] Chagas. (2º Edição 2002) Manual Técnico de Produtos Siderúrgicos. [Online]. [5] F. P. Beer and E. R. Jonhston, Mechanics of Materials. 4º edição, McGaw-Hill, 2006. [6] J. E. Shigley, C. R. Mischke, and R. G. Budynas, Mechanical Engineering Design. 8ª edição, McGraw-Hill, 2008 [7] J. R. Caldas Pinto, Técnicas de Automação. 3ª Edição ETEP, 2010. [8] L.Reis, Slides das Aulas Teóricas de Projecto Mecânico. IST, 2011. [9] M. Siddiqui, M. Haq, Review of Thrust Reverser Mechanism used in Turbofan Jet Engine Aircraft. International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 5 (2013), pp. 717-726. [10] R.C. Ammer, H.D. Sowers, Thrust Reverser Design Studies for an over-the-wing Stol Ttransport. NASA. [11] S. Asbury, J. Yetter, Static Performance of Six Innovative Thrust Reverser Concepts for Subsonic Transport Applications. NASA, 2000. [12] http://www.uff.br/petmec/downloads/resmat/D%20-%20Torcao%20Pura.pdf

- 74 -
13. Anexos
A. Propriedades do fluido Skydrol
A.1 Propriedades físicas e químicas
A.2 Gráfico Viscosidade-Temperatura
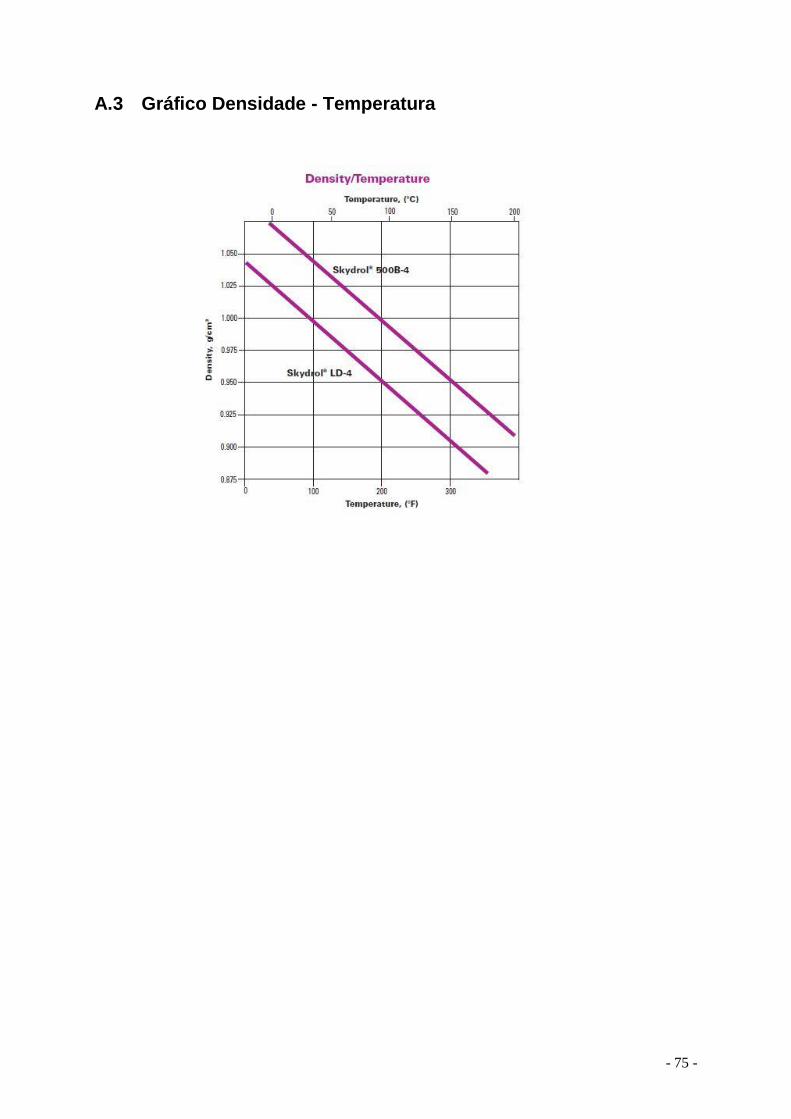
- 75 -
A.3 Gráfico Densidade - Temperatura
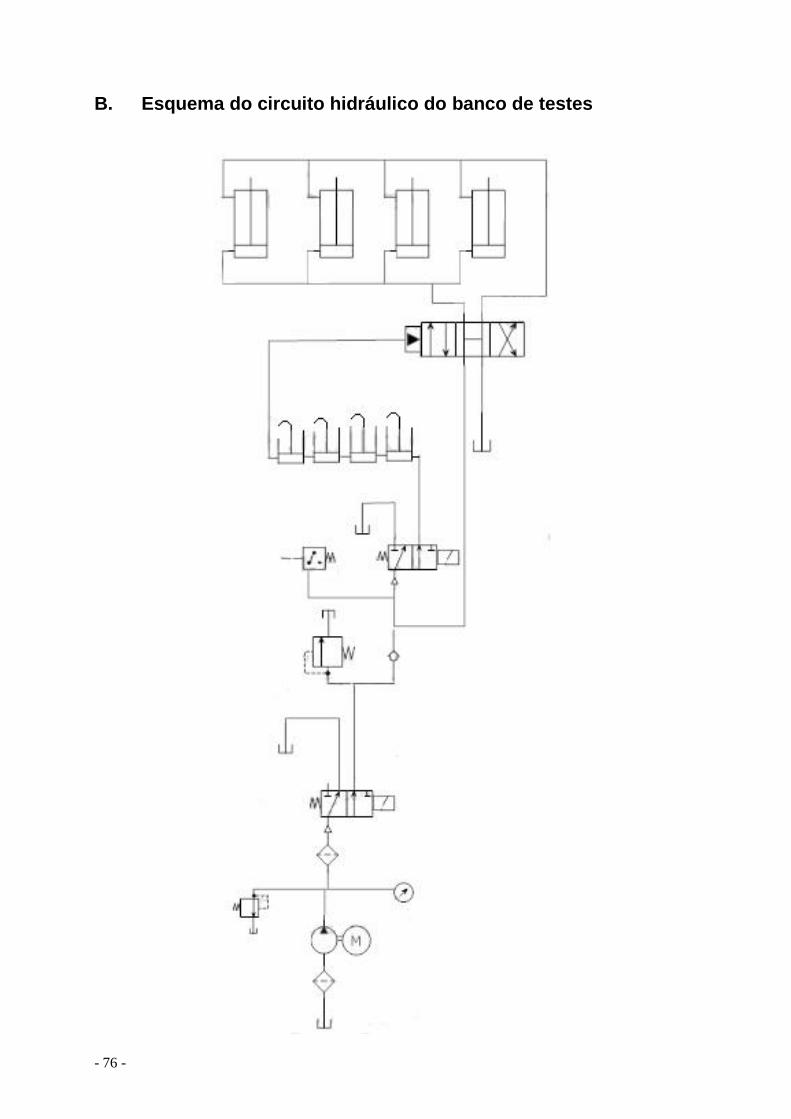
- 76 -
B. Esquema do circuito hidráulico do banco de testes

- 77 -
C. Esquema elétrico do Thrust Reverser
C.1 Esquema elétrico do Thrust Reverser (Parte 1)

- 78 -
C.2 Esquema elétrico do Thrust Reverser (Parte 2)

- 79 -
D. Esquema elétrico do banco de testes do Thrust Reverser
D.1 Teste ao canal A e em Deploy Mode
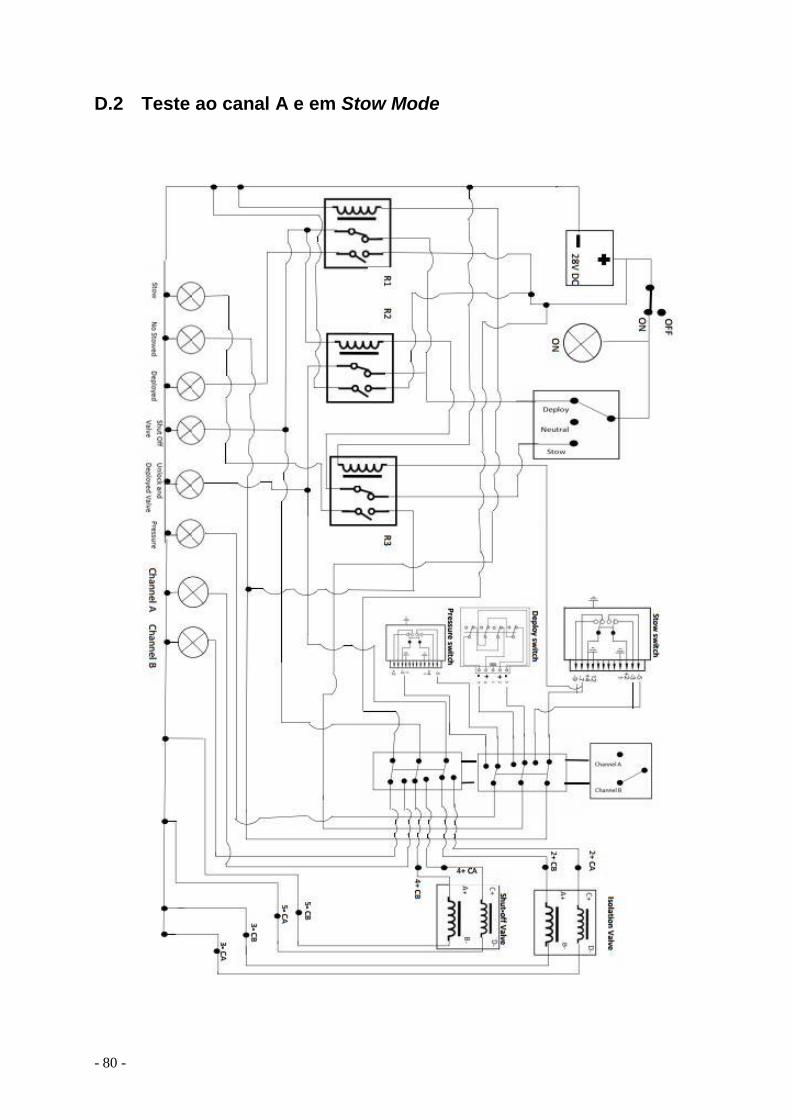
- 80 -
D.2 Teste ao canal A e em Stow Mode
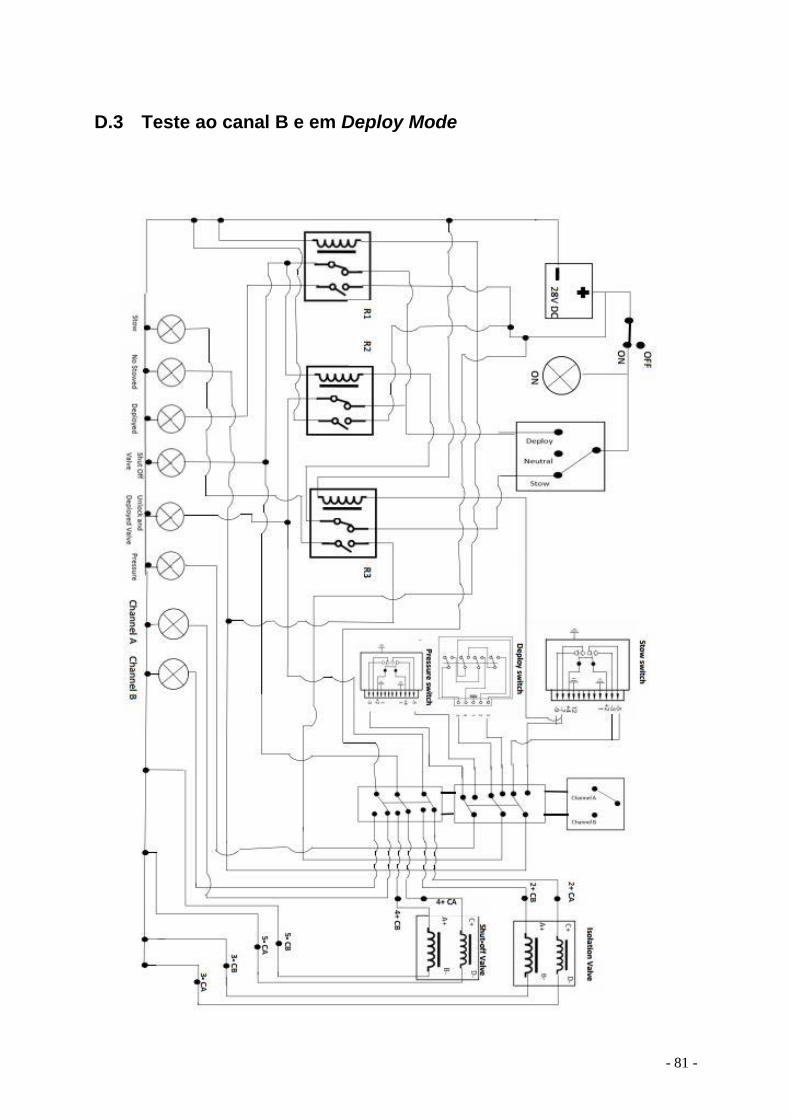
- 81 -
D.3 Teste ao canal B e em Deploy Mode

- 82 -
D.4 Teste ao canal B e em Stow Mode
- 83 -
E. Procedimento de teste do sistema elétrico do TR
1. Antes de se proceder ao teste, deve-se proceder à ligação dos vários
componentes elétricos e mecânicos.
2. Verificar se o interruptor rotativo de 3 posições está no centro (nem Stow,
nem Deploy)
3. Fazer a ligação da fonte de alimentação a uma tomada de 220V AC, 50Hz.
4. Nesta altura deve-se ter em mente o tipo de teste que se deseja fazer:
a) Abertura da metade direita / esquerda para reparação (Deploy)
b) Fecho da metade direita / esquerda após a sua reparação (Stow)
O passo anterior é muito importante, pois quando se faz a reparação do TR, deve-
se colocar um componente em torno do atuador hidráulico para impedir que este feche
por algum motivo. Da mesma forma, deve-se retirar esse componente quando se
deseja fazer o recuo dos atuadores. O sistema hidráulico deve ser ligado antes do
sistema elétrico para permitir que a linha de pressão seja pressurizada com fluido até
aos 3000psi.
1.1 Após se ter ligado o equipamento a uma tomada elétrica 220V DV,
50Hz, roda-se o interruptor rotativo e escolhe-se o canal a testar (A
ou B).
1.2 Escolhe-se a opção deploy na caixa de controlo (e.g. canal A) e a
lâmpada correspondente é acesa.
1.3 O sinal elétrico passa pelos relés R1 e R2 que estão normalmente
fechados.
1.3.1 O sinal que passa pelo relé R1 vai para o pino 2 da shut off valve,
e também para a lâmpada que indica que a shut off valve está
aberta. Isto permite que o fluido circule no sistema.
1.3.2 O sinal que passa pelo relé R2 vai para o pino 4 da deploy valve,
permitindo que o fluido desbloqueie os trincos hidráulicos, acione
- 84 -
o comando hidráulico da válvula distribuidora e o fluido avança
até aos atuadores. Ao mesmo tempo, a lâmpada Pressure é
acesa para indicar que o sistema possui fluido hidráulico a
circular. Também é acesa a lâmpada Unlock Deploy Valve dando
a indicação de que a válvula deploy está aberta.
1.4 Quando o atuador chega ao fim do curso, este desloca a alavanca
do deploy switch e os contactos 2 e 3 são fechados.
1.4.1 O sinal que regressa do deploy switch passa pela bobina do relé
R1, este passa de normalmente fechado para aberto. Esta
mudança faz acender a lâmpada Deployed.
1.4.2 Simultaneamente, a Shut Off valve deixa de receber energia, o
que permite manter o cilindro avançado.
1.5 Para que os atuadores recuem, roda-se o interruptor de 3 posições
para a posição stow mode.
1.6 O sinal sai da fonte de alimentação e passa pelo relé R3 que está
normalmente fechado.
1.6.1 O sinal atua sobre a bobina do relé R2, o contacto normalmente
fechado do R2 abre e deixa de ser fornecida energia à Deploy
Valve.
1.6.2 O atuador começa a recuar e deixa de haver contacto entre os
pinos 2 e 3 do deploy switch. O relé R1 volta a ficar com o
contacto normalmente fechado e permite a abertura da shut off
valve, a luz indicativa acende-se e o fluido hidráulico circula pelo
circuito de retorno.
1.6.3 Enquanto o sistema está a recuar acende-se a luz no stowed que
indica que o sistema está em movimento (nem totalmente aberto,
nem totalmente fechado).
1.6.4 Quando o atuador chega à posição de recuo é feito o contacto
entre os pinos 4 e 7, a bobina do relé R3 é energizada e este abre
e a luz Stowed é acesa, o que indica que o sistema está
totalmente recuado.

- 85 -
Quando se coloca o banco de testes nesta opção, a Shut Off Valve deixa de
receber energia, impedindo que o fluido hidráulico circule no sistema. Este passo é
muito crítico pois apenas se deve colocar neste modo após se ter passado pelo stow
mode. Não se deve colocar no neutro logo a seguir ao modo deploy sob pena de o TR
recuar repentinamente sem qualquer tipo de controlo.