con disordineneuro.fi.isc.cnr.it/uploads/talks/tesi_stefano_polizzi.pdf · ta, con accoppiamento...
TRANSCRIPT

Universitá degli Studi di Firenze
Scuola di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Fisica e Astrofisica
Dinamica di reti neuronalicon
disordine
Dynamics of neuronal networkswith
disorder
Relatore:Dott. Stefano Luccioli
Correlatore:Prof. Roberto Livi
Candidato:Stefano Polizzi
Anno Accademico 2013/2014

Indice
Introduzione 2
1 Fondamenti di neurosiologia 4
1.1 Il neurone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 La membrana cellulare del neurone . . . . . . . . . . . . . . . . . . . 41.3 Il potenziale d'azione . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 La sinapsi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5 Elementi di dinamica neuronale . . . . . . . . . . . . . . . . . . . . . 81.6 Caratteristiche elettriche passive della membrana . . . . . . . . . . . 10
2 La rete neurale 12
2.1 Il modello leaky-integrate and re . . . . . . . . . . . . . . . . . . . . 122.1.1 Risposta ad una corrente costante . . . . . . . . . . . . . . . . 132.1.2 Equazioni del LIF in variabili adimensionali . . . . . . . . . . 14
2.2 Modello di rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Dinamica irregolare di reti neuronali eterogenee 18
3.1 Fondamenti siologici alla base dello studio . . . . . . . . . . . . . . . 183.2 Analisi del comportamento della rete . . . . . . . . . . . . . . . . . . 18
3.2.1 Comportamento macroscopico . . . . . . . . . . . . . . . . . . 193.2.2 Comportamento microscopico . . . . . . . . . . . . . . . . . . 22
Conclusioni 27
A Il modello di Kuramoto 28
B Gli esponenti di Lyapunov 30
Bibliograa 32
1

Introduzione
L'analisi elettrosiologica della corteccia cerebrale ha messo in evidenza un compor-tamento irregolare sia a livello microscopico, ovvero nella sequenza di emissione degliimpulsi dei singoli neuroni [1], sia a livello macroscopico, ovvero nell'attività elettri-ca media generata localmente dall'attività di molteplici neuroni [2]. La presenza dioscillazioni collettive spontanee e di ritmi è in generale osservata in molte aree delcervello [2, 3], non solo nella corteccia cerebrale. Quest'attività oscillatoria è statainoltre messa in relazione con vari processi cognitivi, come ad esempio la percezio-ne ed il consolidamento della memoria [4], risultando un fattore importante nellaproduzione del giudizio visivo ed estetico e nel pensiero [5]. Secondo alcune teorieneurosiologiche [5], un altro ruolo importante dell'esistenza di un comportamentoirregolare sarebbe quello di consentire al cervello di spaziare rapidamente tra le varieabilità funzionali, caratteristica che viene inibita, o per lo meno rallentata, in casodi oscillazioni collettive sincrone o regolari. Dal punto di vista clinico, comporta-menti anormalmente sincroni o regolari caratterizzano infatti importanti disordini,o patologie, del sistema nervoso (come il morbo di Parkinson e l'epilessia).
L'applicazione delle metodologie della meccanica statistica e dei sistemi dinamici,introdotte negli ultimi vent'anni in quest'ambito, può fornire un utile strumentoper studiare i meccanismi alla base dell'emergenza di questi fenomeni oscillatoricollettivi. Molti sforzi nelle neuroscienze computazionali sono stati in particolarerivolti a riprodurre con modelli minimali tali caratteristiche di irregolarità dei segnalicorticali, utilizzando sia modelli stocastici che deterministici. Nell'ambito dei modellideterministici l'irregolarità del comportamento è realizzata ad esempio introducendoforme di disordine nella connettività della rete e/o nelle proprietà dei singoli neuroni,che costituiscono i nodi della rete.
In questa tesi sarà illustrato in particolare il comportamento di un modello deter-ministico di rete neuronale, estensivamente analizzato in [6]. Il modello è costituitoda una rete di neuroni leaky-integrate-and-re globalmente accoppiati, in cui il di-sordine è rappresentato dal fatto che ogni neurone possiede una diversa frequenzanaturale di emissione degli impulsi. Come vedremo, la caratteristica fondamentaledel modello è costituita dal fatto che all'incremento della forza dell'accoppiamentosinaptico tra i neuroni, si assiste ad una transizione verso uno stato collettivo nonbanale, caratterizzato da oscillazioni collettive irregolari, non periodiche. Si osservainoltre, in tal caso, che anche l'attività microscopica della rete, ovvero la sequenzadi emissione degli impulsi dei singoli neuroni, risulta irregolare.
Dal punto di vista della teoria dei sistemi dinamici il modello risulta non caoticoe quindi dopo un transiente esso converge verso uno stato periodico. Tuttavia, inquesto caso, i tempi in cui viene raggiunto lo stato periodico, risultano esponen-
2

zialmente crescenti con la taglia del sistema; quindi, quando il numero di neuroni èmolto grande, il regime dinamico rilevante è quello del transiente, piuttosto che l'or-bita periodica raggiunta su scale di tempo astronomiche. Questo particolare regimedinamico è noto come stable chaos [7].
Si riassumono ora brevemente i contenuti salienti di ogni capitolo. Nel primocapitolo vengono introdotti gli elementi principali di neurosiologia necessari percomprendere il lavoro svolto in seguito, e per avere una panoramica generale delfunzionamento della dinamica neuronale. Alla base di questa vi è il concetto dipotenziale d'azione, ovvero l'impulso elettrico emesso dai neuroni che consente loscambio di informazioni tra i neuroni stessi. In seguito, nel secondo capitolo, verràinnanzitutto descritto il modello di singolo neurone utilizzato come costituente dellarete, cioè il modello leaky integrate and re (LIF). Quindi sarà descritto il modellospecico di rete analizzato, ovvero una rete di LIF eterogenea globalmente accoppia-ta, con accoppiamento inibitorio, e con impulsi dotati della forma di una δ di Dirac.Il modello è abbastanza semplicato da consentire simulazioni numeriche estensivee analisi teoriche e pertanto è ampiamente utilizzato in neuroscienze. Questo im-pianto è stato utilizzato nell'articolo di S Luccioli e A. Politi nel 2010 [6], da cui latesi trae origine. Inne, nel terzo capitolo, sarà analizzato in modo dettagliato ilcomportamento della rete sia a livello macroscopico che microscopico. In tale con-testo sarà eettuato anche un confronto con il noto modello di oscillatori di fase diKuramoto (brevemente approfondito nella prima appendice), il quale costituisce ilmodello paradigmatico per studiare fenomeni di sincronizzazione e, in generale, diinsorgenza di comportamenti collettivi. La seconda appendice è invece dedicata aduna breve trattazione degli esponenti di Lyapunov, che costituiscono un importantestrumento di analisi delle proprietà microscopiche di un sistema dinamico.
3
Capitolo 1
Fondamenti di neurosiologia
In questo capitolo verranno introdotti gli elementi principali di neurosiologia e didinamica neuronale. In particolare verranno illustrate le caratteristiche del poten-ziale d'azione, ovvero l'impulso elettrico emesso dai neuroni, alla base dello scambiodi informazioni tra i neuroni stessi. Inne verranno esposte le proprietà elettrichedella membrana neuronale.
1.1 Il neurone
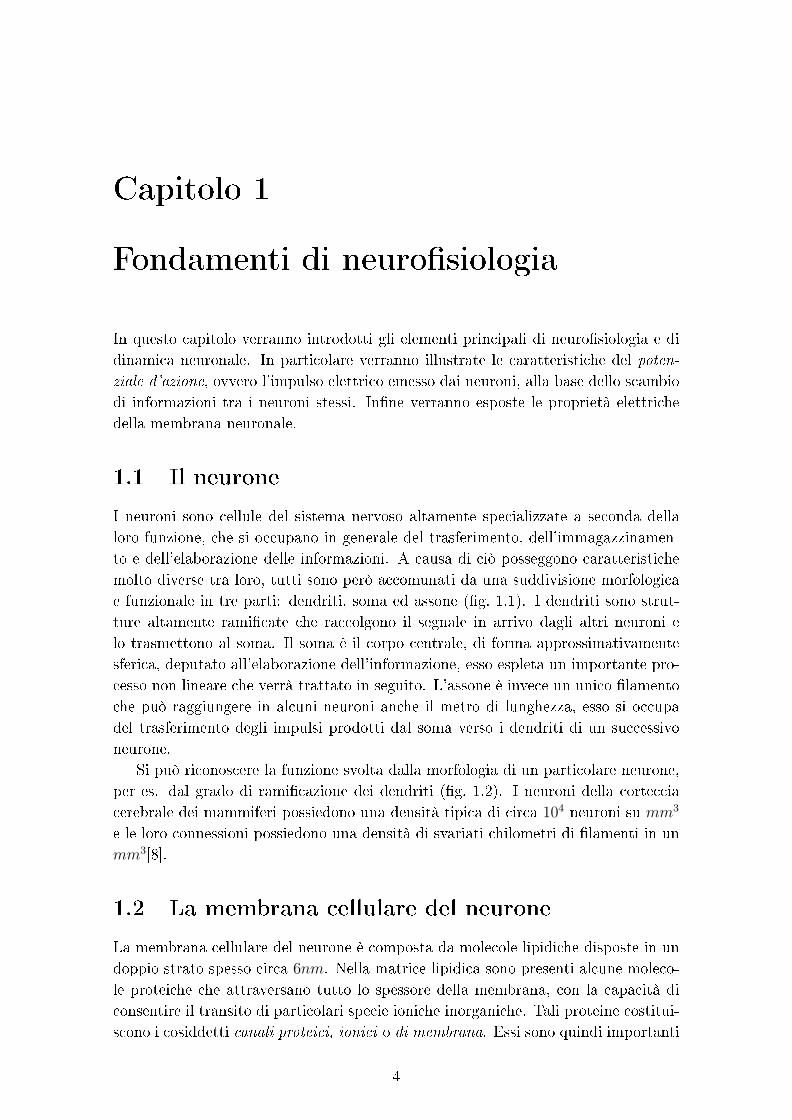
I neuroni sono cellule del sistema nervoso altamente specializzate a seconda dellaloro funzione, che si occupano in generale del trasferimento, dell'immagazzinamen-to e dell'elaborazione delle informazioni. A causa di ciò posseggono caratteristichemolto diverse tra loro, tutti sono però accomunati da una suddivisione morfologicae funzionale in tre parti: dendriti, soma ed assone (g. 1.1). I dendriti sono strut-ture altamente ramicate che raccolgono il segnale in arrivo dagli altri neuroni elo trasmettono al soma. Il soma è il corpo centrale, di forma approssimativamentesferica, deputato all'elaborazione dell'informazione, esso espleta un importante pro-cesso non lineare che verrà trattato in seguito. L'assone è invece un unico lamentoche può raggiungere in alcuni neuroni anche il metro di lunghezza, esso si occupadel trasferimento degli impulsi prodotti dal soma verso i dendriti di un successivoneurone.
Si può riconoscere la funzione svolta dalla morfologia di un particolare neurone,per es. dal grado di ramicazione dei dendriti (g. 1.2). I neuroni della cortecciacerebrale dei mammiferi possiedono una densità tipica di circa 104 neuroni su mm3
e le loro connessioni possiedono una densità di svariati chilometri di lamenti in unmm3[8].
1.2 La membrana cellulare del neurone
La membrana cellulare del neurone è composta da molecole lipidiche disposte in undoppio strato spesso circa 6nm. Nella matrice lipidica sono presenti alcune moleco-le proteiche che attraversano tutto lo spessore della membrana, con la capacità diconsentire il transito di particolari specie ioniche inorganiche. Tali proteine costitui-scono i cosiddetti canali proteici, ionici o di membrana. Essi sono quindi importanti
4
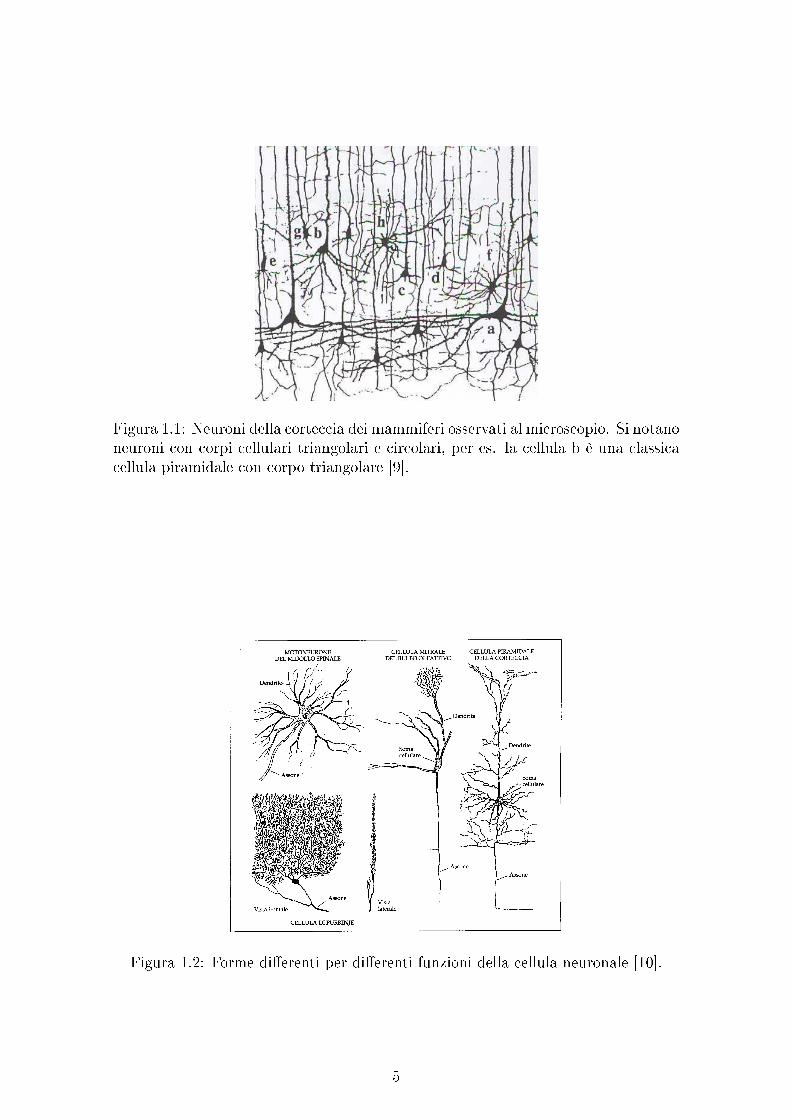
Figura 1.1: Neuroni della corteccia dei mammiferi osservati al microscopio. Si notanoneuroni con corpi cellulari triangolari e circolari, per es. la cellula b è una classicacellula piramidale con corpo triangolare [9].
Figura 1.2: Forme dierenti per dierenti funzioni della cellula neuronale [10].
5

in quanto consentono il usso tra l'interno e l'esterno della cellula delle correnti io-niche, che sono alla base dell'attività elettrica del neurone. Tra le più importantispecie ioniche vi sono: il sodio (Na+), il potassio (K+), il cloro (Cl−) e il calcio(Ca2+).
La corrente ionica che attraversa un canale dipende in generale dai seguentifattori:
• dalla conduttanza del canale (con le dimensioni del reciproco di una resistenza),ovvero la capacità di trasportare corrente elettrica;
• dal gradiente di concentrazione tra l'esterno e l'interno della cellula, che pro-duce un usso ionico dalla zona a maggior concentrazione verso quella a minorconcentrazione secondo la legge empirica enunciata da Fick [11];
• dalla dierenza di potenziale applicata alla membrana.
Non verrà ulteriormente approfondito il meccanismo accennato in questa sede,basti sapere che oltre al suddetto procedimento, del tutto passivo, ne esiste ancheuno attivo, ovvero il meccanismo delle pompe ioniche, che trasportano due specieioniche da una parte all'altra della membrana, con un certo rapporto costante.
1.3 Il potenziale d'azione
La dierenza di potenziale elettrico tra l'interno e l'esterno della membrana, chesi può misurare ponendo un elettrodo all'interno della cellula neuronale ed uno nelliquido extracellulare circostante, prende il nome di potenziale di membrana. Se ilneurone non viene eccitato dall'esterno il potenziale di membrana si attesta attor-no ad un valore caratteristico detto potenziale di riposo, intorno ai −65mV , cioèl'interno della cellula si trova ad un potenziale inferiore rispetto all'esterno.
Lo studio della variazione del potenziale di membrana nel tempo e nello spazioha portato alla denizione del potenziale d'azione. Si è infatti notato che qualorail neurone riceva una quantità suciente di stimoli, ed il potenziale di membranacresca no ad un valore caratteristico, chiamato soglia di attivazione e indicato con ϑ,il soma emette un impulso caratteristico, chiamato potenziale d'azione. Si è inoltrenotato che lungo l'assone tale segnale si propaga invariato e che esso ha una formacaratteristica pressoché uguale per ogni neurone (g. 1.3). Da ciò si può assumere− ma è una questione a tutt'oggi ancora dibattuta in letteratura − che la formadell'impulso non contenga alcuna informazione, mentre essa è bensì racchiusa nellasequenza di emissione degli impulsi e nell'istante di emissione degli stessi.
Sempre facendo riferimento alla gura 1.3 si nota che il potenziale d'azione con-siste inizialmente in una rapida crescita del potenziale di membrana no ad arrivaread una fase in cui esso diviene positivo. Questa fase è detta di depolarizzazione, edè causata dal rapido ausso di ioni Na+ verso l'interno della cellula. In seguito,in corrispondenza del deusso degli ioni K+ dall'interno verso l'esterno, si ha unafase di discesa del potenziale di membrana. Prima di tornare al valore di riposo ilpotenziale di membrana attraversa una fase in cui risulta inferiore al potenziale diriposo. Tale fase è detta di iperpolarizzazione.
6

Il potenziale d'azione ha un'ampiezza caratteristica di circa 100mV e una duratadi 1-2 ms.
Il meccanismo che entra in gioco nella genesi del potenziale d'azione fa parte deicosiddetti meccanismi di feedback, ovvero processi a cascata in cui due variabili, adesempio la corrente ionica e il potenziale di membrana, dipendono l'una dall'altra eviceversa. Ad esempio nel caso del sodio si ha un feedback positivo, in quanto unpiccolo aumento del potenziale di membrana causa un aumento della conduttanzadel sodio, dunque un aumento del usso in entrata dello stesso, causando a sua voltaun'ulteriore depolarizzazione della membrana, e perciò un aumento del usso, e cosìvia. La catena si interrompe solo al raggiungimento delle condizioni di equilibrio.Inne bisogna specicare che le scale temporali con cui si aprono i vari canali sonodierenti, per esempio l'attivazione del canale del sodio avviene su scale temporalidi gran lunga inferiori a quella del canale del potassio, ed è questa la ragione dellafase di rapida depolarizzazione al principio del segnale.
Tipicamente quando si parla di segnale emesso da un neurone, si intende lasequenza dei potenziali d'azione nel tempo. I singoli impulsi sono di solito benseparati, poiché esiste un tempo di refrattarietà assoluta, coincidente con la duratadel potenziale d'azione, in cui anche con input molto forti non è possibile generareun altro potenziale d'azione. Si denisce inoltre un tempo di refrattarietà relativa(della durata di circa 10 ms), coincidente con la fase di iperpolarizzazione, in cuiinvece è molto dicile, ma non impossibile che il neurone venga eccitato no ademettere un nuovo potenziale d'azione.
Figura 1.3: Forma tipica del potenziale d'azione [9].
1.4 La sinapsi
La giunzione tra due neuroni è detta sinapsi. Si tratta cioè di quella struttura chepermette il trasferimento dell'informazione dall'assone di un neurone ai dendriti delsuccessivo. Il neurone che invia il potenziale d'azione, a monte della sinapsi, vienedetto presinaptico, mentre quello che lo riceve, a valle della sinapsi, viene dettopostsinaptico. Si denisce inoltre potenziale postsinaptico la risposta in tensione
7

del neurone postsinaptico conseguente all'arrivo del potenziale d'azione, rielaboratodalla sinapsi, proveniente dal neurone presinaptico.
Esistono due tipi diversi di sinapsi, quelle elettriche e quelle chimiche. In questasede verrà spiegato prevalentemente il funzionamento delle sinapsi chimiche, le piùcomuni nel cervello dei vertebrati. Il potenziale d'azione proveniente dal neuronepresinaptico, giunto all'estremità dell'assone, depolarizza localmente la membranae causa il rilascio all'interno della fessura sinaptica (g 1.4) di particolari sostanzechimiche, dette neurotrasmettitori. I neurotrasmettitori vengono rivelati da specialimolecole (chemorecettori) situate sulla membrana postsinaptica che provocano l'a-pertura di specici canali attraverso i quali uisce una corrente ionica dal liquidoextracellulare all'interno della cellula. Questo produce a sua volta una variazionedel potenziale di membrana del neurone postsinaptico. Il segnale viene dunque tra-sformato da elettrico in chimico sulla membrana presinaptica, e poi nuovamente dachimico in elettrico sulla membrana postsinaptica. L'ampiezza del segnale ricevutodal neurone postsinaptico (ovvero il potenziale postsinaptico) è inferiore, rispetto aquella del potenziale d'azione.
La sinapsi elettrica permette invece un usso di corrente diretto tra neuroniadiacenti, ed è coinvolta in processi, quali i riessi in seguito a stimoli esterni, in cuiè necessario avere un'alta velocità di trasferimento dell'informazione.
Figura 1.4: Esempio di sinapsi chimica con la relativa nomenclatura [10].
1.5 Elementi di dinamica neuronale
Si è visto visto che, se il neurone non viene eccitato, il potenziale di membranamantiene un valore costante, il potenziale di riposo. A seguito del ricevimento diun impulso il potenziale di membrana può aumentare o diminuire, nel primo caso lasinapsi è detta eccitatoria, nel secondo inibitoria. In media un neurone della cortecciacerebrale possiede circa 103−104 connessioni sinaptiche, di cui l'85% eccitatorie, masolo una minima parte di esse (intorno al 5− 10%) sono realmente attive.
8

In formule misurando l'evoluzione nel tempo della dierenza di potenziale ai duelati della membrana, si ottiene:
u(t)− urest = εij(t), (1.1)
dove εij(t) indica la forma dell'impulso ricevuto dal neurone i, dunque il potenzialepostsinaptico (g. 1.5 A), mentre ut e u(rest) sono rispettivamente il potenziale dimembrana al tempo t e il potenziale di membrana a riposo.
Figura 1.5: Genesi del potenziale d'azione: A. Il ricevimento di un impulso produceun potenziale postsinaptico eccitatorio sul neurone i. B. Il ricevimento di un impulsoda un secondo neurone presinaptico produce un segnale eccitatorio che si somma alprecedente. C. La somma di molteplici input permette al potenziale di membranadi raggiungere la soglia di attivazione ϑ, e quindi di generare un potenziale d'azione[8].
In questa schematizzazione l'impulso si considera emesso dal neurone presinapti-co j al tempo t = 0 dunque la risposta sugli elettrodi si avrà per t > 0. Se si hannopiù impulsi in entrata provenienti da più neuroni a istanti diversi (t(f)j ) invece:
u(t)− urest =N∑j=1
∑f
εij(t− t(f)j ), (1.2)
ovvero il potenziale di membrana ha approssimativamente una risposta lineare agliimpulsi in ingresso (g. 1.5 B). Il comportamento diviene invece improvvisamentenon lineare quando u(t) raggiunge il valore di soglia, ϑ, momento in cui viene emesso
9

il potenziale d'azione (g. 1.5 C). Oltre questo istante e per tutta la durata delpotenziale d'azione, indipendentemente dal numero e dall'ampiezza dei segnali iningresso, questi avrà sempre la medesima forma e la medesima ampiezza.
Un singolo potenziale postsinaptico eccitatorio ha ampiezza intorno a 0.5−1mV ,mentre la soglia è di circa 20-30 mV sopra il potenziale di riposo.
Figura 1.6: A. Registrazioni sperimentali di potenziali postsinaptici eccitatori dellacorteccia visuale di un ratto. B. Istogrammi delle ampiezze di picco dei medesimipotenziali [12].
1.6 Caratteristiche elettriche passive della membra-
na
La membrana cellulare a riposo può essere utilmente schematizzata come il parallelodi molteplici circuiti come quello nella gura sottostante (g.1.7), che rappresentauna singola porzione di membrana.
Figura 1.7: schema circuitale di una porzione di membrana cellulare del neurone.Vrest indica il potenziale di riposo [13].
La presenza di una resistenza R si spiega con l'esistenza dei canali ionici, cherealizzano un contatto elettrico tra l'interno e l'esterno della cellula. La resistenzadi membrana viene in genere riportata come resistenza di membrana specica Rm,denita come resistenza per unità di supercie (in unità Ω · cm2). Questa denizio-ne ha una ragione biologica: il valore di Rm dipende dal numero di canali presenti
10

in una porzione di supercie, dunque maggiore è la supercie, minore sarà la resi-stenza. L'esistenza del condensatore è invece giusticata dal fatto che la membranaha la capacità di accumulare cariche ai suoi lati. La capacità di membrana è disolito riportata in termini di capacità di membrana specica, Cm espressa in unitàµF · cm−2. Inne l'esistenza di un potenziale di riposo viene rappresentata da ungeneratore di tensione costante, pari al valore del potenziale di riposo.
Valori tipici per questi elementi circuitali sono: Rm compreso tra 103 e 5 · 104
Ω·cm2, in base al numero di canali ionici presenti; Cm = 1 µF ·cm−2, che, consideratoper il potenziale di riposo un valore di V = −65mV , si può stimare che ai lati dellamembrana è presente una carica di |Qm| = Cm ·V = 6.5 ·10−8 C · cm−2, ovvero circa4 · 1011 ioni monovalenti per cm2.
11

Capitolo 2
La rete neurale
Nel seguente capitolo verrà innanzitutto introdotto il modello di singolo neuroneutilizzato come costituente della rete, cioè il modello leaky-integrate and re. Inseguito verrà descritto il modello specico di rete analizzato nel presente lavoro ditesi, ovvero quello utilizzato nell'articolo di S. Luccioli e A. Politi nel 2010 [6].
2.1 Il modello leaky-integrate and re
Il modello leaky integrate and re (abbrev. LIF) è un modello di singolo neuroneunidimensionale e costituisce un esempio di modello formale, un modello cioè in cuiviene descritta in modo estremamente semplicato la dinamica sotto-soglia, ovveroprima dell'insorgenza del potenziale d'azione, mentre quest'ultimo, poiché possiedeuna forma stereotipata, è descritto sinteticamente come un evento impulsivo. Siassume dunque, come precedentemente asserito (cfr. par. 1.3), che la forma delpotenziale d'azione non contenga alcuna informazione.
Come si nota nella gura 2.1 le proprietà elettriche passive della membrana so-no riassunte e schematizzate dalla resistenza e dal condensatore in parallelo. Ladierenza di potenziale ai capi del parallelo di resistenza e condensatore, V (t), rap-presenta il potenziale di membrana e l'input eettivo in ingresso nel neurone vieneragurato come una corrente I(t). Come si vede dalla g. 2.1 il potenziale V (t)
viene confrontato con una tensione di riferimento ϑ (che rappresenta la soglia di at-tivazione), e quando la raggiunge viene emesso un potenziale d'azione. Il potenzialed'azione viene schematizzato come un evento istantaneo localizzato nel tempo, tipoδ di Dirac centrata nell'istante di emissione t(f)i .
Utilizzando la legge dei nodi è possibile risolvere il circuito e determinare la di-pendenza dal tempo del potenziale di membrana. Si può infatti suddividere I(t)
in due contributi, IR(t) e IC(t), le correnti che attraversano rispettivamente la re-sistenza ed il condensatore, ed esplicitare la loro dipendenza da V (t) (IR = V/R,IC = dQ/dt = CdV/dt, con Q carica accumulata su C):
I(t) = IR(t) + IC(t) =V (t)
R+ C
dV (t)
dt, (2.1)
che può essere riscritta, introducendo la costante tempo della membrana, τm = RC,nel seguente modo:
12

Figura 2.1: Schema circuitale del modello leaky integrate and re [8].
τmdV (t)
dt+ V (t)−RI(t) = 0. (2.2)
Quest'equazione dierenziale del prim'ordine descrive la dinamica neuronale noall'istante t(f), denito dall'equazione V (t(f)) = ϑ, in cui viene emesso l'impulso.Immediatamente dopo l'emissione del potenziale d'azione, la dinamica sottosoglia,rappresentata dall'equazione (2.2), viene interrotta, e V (t) viene riportato al valorea riposo, Vr, dunque:
limt→t(f)+
V (t) = Vr.
Se si volesse introdurre nel modello la refrattarietà assoluta basterebbe inserire unintervallo temporale ∆abs in cui la dinamica sottosoglia viene interrotta in seguitoall'emissione del potenziale d'azione, ovvero V (t) = Vr per t compreso tra t(f) et = t(f) + ∆abs. Successivamente la dinamica sottosoglia verrà riattivata con lacondizione iniziale V (t(f) + ∆abs) = Vr.
2.1.1 Risposta ad una corrente costante
Per iniziare a capire come si comporta il modello sotto determinati input, si supponeI(t) = I0 con I0 costante e si riscala il potenziale in modo tale che Vr = 0 (cfr. pa-ragrafo seguente). L'equazione (2.2) è, in queste condizioni, una semplice equazionedierenziale lineare a coecienti costanti, che ha come soluzione:
V (t) = RI0(1− e−tτm ), (2.3)
avendo imposto la condizione al contorno V (0) = 0, cioè supponendo che sia appenastato emesso un impulso al tempo t = 0. Si vede dunque che per t→∞, V (t)→ RI0,dunque perché sia generato un potenziale d'azione si deve avere necessariamenteRI0 > ϑ.
Si può poi andare a calcolare il tempo che intercorre tra un impulso ed il
13

successivo (T ) dalla condizione V (T ) = ϑ, ottenendo:
T = τm ln
(RI0
RI0 − ϑ
), (2.4)
ovvero se RI0 > ϑ si ha emissione d'impulsi ad una frequenza ν = 1/T costante:
ν =1
τm ln(
RI0RI0−ϑ
) . (2.5)
L'introduzione della refrattarietà assoluta porta ad una diminuzione della fre-quenza di sparo:
νabs =1
T + ∆abs
=1
∆abs + τm ln RI0RI0−ϑ
. (2.6)
Figura 2.2: Confronto tra la frequenza in funzione di I0 nel caso del modello privo direfrattarietà assoluta (linea continua) e nel caso in cui invece essa è presente (lineatratteggiata) [8].
2.1.2 Equazioni del LIF in variabili adimensionali
Nell'ambito dei modelli teorici torna comodo utilizzare nell'implementazione com-putazionale variabili adimensionali. Ciò perché si rende il tutto più immediato eleggibile. Per non perdere però il contatto con le grandezze siche originarie vengo-no qui descritte nel dettaglio le trasformazioni eettuate, con riferimento ai simbolidell'eq (2.2):
t −→ tτm
V −→ v = V−Vrϑ−Vr
RI0 −→ a = RI0−Vrϑ−Vr
, (2.7)
con Vr si è indicato, come in precedenza, il potenziale di riposo. Si è utilizzato lostesso simbolo, t, sia per la nuova che per la vecchia variabile temporale senza ilrischio di incorrere in equivoci.
14

Con queste sostituzioni si è dunque reso tutte le variabili adimensionali e si ènormalizzato il potenziale di membrana rispetto a ϑ, cosicché v(t) ∈ [0, 1]. Nell'i-stante in cui v(t) giunge a soglia (v(t) = 1), viene immediatamente riportato a 0, eviene emesso un impulso. La nuova variabile a rappresenta invece una corrente dibackground costante. Si noti che rispetto all'equazione (2.2) essa racchiuda in sé lecaratteristiche di ogni singolo neurone, poiché la resistenza di membrana R0 è statariassorbita nella sua denizione.
2.2 Modello di rete
Si introduce innanzitutto una denizione generale di rete con alcune denizioni dibase. Per rete neurale si intende un insieme di neuroni interconnessi gli uni agli altri.Utilizzando il linguaggio delle reti, i neuroni, punti di arrivo e di partenza di tuttele connessioni, costituiscono i nodi. Per poter studiare una rete si devono specicarele proprietà sia dei nodi che delle connessioni. Il tipo di rete ivi considerato èquello di rete random, ovvero quel tipo di rete che ha la proprietà di non averescale di lunghezza predeterminate, com'è invece, per esempio, per la rete del reticolocristallino di un solido. Una rete, inoltre, viene detta disordinata se vale almeno unadelle seguenti condizioni:
• se non tutte le connessioni sono attive, da notare al riguardo che non è dettoche se il neurone 1 è collegato con il neurone 2, valga anche il viceversa;
• se i neuroni hanno proprietà diverse tra loro, ovvero per esempio possiedonouna dierente frequenza propria di emissione del potenziale d'azione.
Figura 2.3: Due possibili motivi dell'origine del disordine in reti neurali: a sinistrauna rete globalmente accoppiata eterogenea (con neuroni che hanno ognuno unapropria frequenza di oscillazione), e a destra una rete in cui i neuroni hanno le stesseproprietà intrinseche, ma alcune connessioni sono interrotte.
Sia k il numero medio di connessioni attive entranti in un nodo, ed N la tagliadella rete (ovvero il numero di neuroni), si hanno tre possibilità all'aumentare diquest'ultima: k proporzionale a N , k costante al variare della taglia, oppure k =
N . Nel primo caso si parla di massively connected network (rete massivamenteaccoppiata), nel secondo di sparse network (rete sparsa), mentre nel terzo caso sitratta di una rete in cui ogni nodo è collegato con tutti gli altri, viene infatti chiamatafully coupled network (rete globalmente accoppiata). In tutti questi casi, in presenza
15

delle suddette condizioni, si parla di quenched disorder, cioè di un tipo di disordinecongelato, che non cambia durante l'evoluzione del sistema dinamico nel tempo.
Nel caso preso in esame in questa tesi è stato analizzato un modello di retecostituito da neuroni leaky integrate and re, con accoppiamento impulsivo, il chesignica che i neuroni sono liberi, tranne quando ricevono gli impulsi, come si puòvedere dalla successiva formula. L'equazione più generale di un siatto modello,riscalato in variabili adimensionali (cfr. par.2.1.2), è la seguente:
vi(t) = ai − vi(t) +g
N
∑n|tn<t
Si,l(n)F (t− tn − td) i = 1, ..., N, (2.8)
dove la prima parte, escludendo la sommatoria, rappresenta la dinamica del neuronei-esimo libero, mentre la parte contenente la sommatoria, il cui indice corre su tuttigli impulsi precedentemente ricevuti, è la parte di accoppiamento. Il parametro gmisura la forza media dell'impulso, è detto parametro di accoppiamento ed è dotatodi segno: se positivo indica un accoppiamento eccitatorio, se negativo inibitorio.La matrice Sil è la matrice di connettività, i cui valori possono essere 1, se esiste laconnessione tra il neurone i e il neurone l, zero altrimenti. F (t) è la forma funzionaledell'impulso ricevuto, ad area unitaria, ovvero la forma del potenziale postsinaptico.Inne tn è il tempo di emissione dell'impulso, e td è il ritardo con cui questo vienericevuto, ritardo che nella realtà è sempre presente, a causa della velocità nita concui si trasmettono i segnali elettrici e a causa della presenza della sinapsi.
In particolare la rete studiata sarà una rete completamente accoppiata, in cuicioè Sil avrà tutti gli elementi uguali a 1. Il ritardo sarà presente e la funzione F (t)
sarà una semplice δ di Dirac. Inoltre essa sarà una rete eterogenea, ovvero gli ai,che racchiudono le proprietà speciche del singolo neurone (cfr. equazione (2.7)),saranno in diversi fra loro, e questo è realisticamente dovuto al fatto che ogni cellulaneuronale è diversa, avrà una soglia dierente e una corrente di background diversa,dovuta agli stimoli provenienti da altre aree del cervello. Questo sarà, nel presentestudio, il motivo dell'origine del disordine della rete. Inne l'accoppiamento saràesclusivamente inibitorio. L'equazione a cui si farà riferimento sarà dunque:
vi(t) = ai − vi(t)−g
N
∑n|tn<t
δ(t− tn − td) i = 1, ..., N, (2.9)
con g > 0 (l'accoppiamento inibitorio è dato dal segno meno davanti). In questocaso è stato scelto td = 0.1. Si deve inoltre tenere presente che i valori di ai appar-tengono all'intervallo [1.2, 2.8], essendo la scelta di tale intervallo fondamentale per ilcomportamento della rete. Le variabili sono quelle adimensionali introdotte nell'eq.(2.7), dunque v(t), nell'istante in cui v(t) = 1, viene istantaneamente riportato azero e viene emesso un impulso. Al di fuori dell'istante in cui viene ricevuto lo spikel'equazione è integrabile analiticamente.
È importante notare che l'eetto di un impulso non è il medesimo per ogni istantedi tempo. In particolare, poiché la pendenza della curva di evoluzione del singoloneurone diminuisce man mano che questi si avvicina a soglia, il ritardo misuratonel tempo che un impulso inibitorio conferisce al neurone sarà maggiore se l'impulsogiungerà quando il neurone è più vicino a soglia, ovvero quando la pendenza della
16

curva è minore.
17

Capitolo 3
Dinamica irregolare di reti neuronali
eterogenee
Nel capitolo che segue verrà eettuata una breve introduzione che spiega le motiva-zione alla base dello studio. In seguito verrà illustrato nel dettaglio il comportamentodel modello studiato nell'articolo di S. Luccioli e A. Politi [6], prima a livello ma-croscopico, e successivamente a livello microscopico, con lo scopo di studiarne ilcomportamento dinamico.
3.1 Fondamenti siologici alla base dello studio
L'analisi elettrosiologica della corteccia cerebrale ha messo in evidenza un compor-tamento irregolare sia a livello microscopico, ossia nella sequenza di emissione degliimpulsi dei singoli neuroni [1]. sia a livello macroscopico, vale a dire nell'attivitàelettrica media generata localmente dall'attività di molteplici neuroni [2].
La presenza di oscillazioni collettive spontanee e di ritmi è in generale osservata inmolte aree del cervello [2, 3], ed è stata messa in relazione con vari processi cognitivi,come ad esempio la percezione ed il consolidamento della memoria [4].
Molti sforzi nelle neuroscienze computazionali sono stati rivolti a riprodurre conmodelli minimali tali caratteristiche di irregolarità, utilizzando sia modelli stocasticiche deterministici. Nell'ambito dei modelli deterministici l'irregolarità del compor-tamento è realizzata ad esempio introducendo forme di disordine nella connettivitàdella rete e/o nelle proprietà dei singoli neuroni, che costituiscono i nodi della rete.
In questo capitolo sarà illustrato in particolare il comportamento di un modellodeterministico di rete neuronale (estensivamente analizzato in [6]), in cui il disordineè rappresentato dal fatto che ogni neurone possiede una diversa frequenza naturaledi emissione degli impulsi.
3.2 Analisi del comportamento della rete
In questa sezione verrà analizzato il comportamento sia a livello macroscopico, ovveroa livello di attività collettiva della rete, sia a livello microscopico, ovvero a livellodi singolo neurone, di una rete neuronale eterogenea, come quella introdotta nelparagrafo 2.2.
18

Si introducono qui alcuni concetti fondamentali alla base dell'intero studio. Bi-sogna innanzitutto tenere presente che la dinamica della rete è non caotica, poichél'esponente di Lyapunov massimo (escluso lo zero) è sempre negativo (cfr. appendi-ce B), ma i tempi scala su cui l'intero sistema raggiungerà un'orbita periodica sonoesponenzialmente crescenti con la taglia del sistema. Perciò quando la taglia delsistema è molto grande, ne viene studiata la dinamica nel transiente, ovvero proprionella fase precedente al raggiungimento di un comportamento periodico, in quantol'orbita periodica è raggiunta su scale di tempo astronomiche.
Verrà inne percorso un parallelo con il ben noto e ampiamente utilizzatomodello
di Kuramoto (KM) (cfr. A.2), il quale descrive la dinamica di un insieme di oscillatoridi fase accoppiati, e che costituisce il modello paradigmatico per studiare fenomenidi sincronizzazione.
3.2.1 Comportamento macroscopico
La rete studiata è dunque una rete eterogenea, globalmente accoppiata, con accop-piamento inibitorio. Tale impostazione è simile a quella del KM, un modello dioscillatori di fase, dove si ha una frequenza ωi diversa per ogni nodo (cfr. eq. (A.1)).È importante chiarire no a che livello i due modelli di rete siano in analogia alcrescere della forza della sinapsi, g (cfr. eq. (2.9)), in quanto il modello di Kura-
moto viene spesso preso come riferimento per studiare fenomeni di sincronizzazionenell'ambito delle reti neurali.
Il comportamento globale della rete viene studiato dunque al variare di g, maanche al variare di N tendente a valori sempre più elevati, cioè nel limite termodi-namico, si può così analizzare in che modo il comportamento della rete è inuenzatodalla taglia.
Nel modello di Kuramoto, oltre un certo valore critico della forza di accoppia-mento, gli oscillatori cominciano a sincronizzarsi, come evidenziato da un valore delparametro d'ordine r = | 1
N
∑Nj=1 e
iθj | diverso da zero (cfr. eq. (A.2)). Anche nel-la rete LIF si osserva una transizione, ma verso un comportamento collettivo nonbanale, al variare della forza della sinapsi.
Infatti la più importante dierenza tra i due modelli è che la dinamica macrosco-pica collettiva oltre il valore critico di g mostra oscillazioni irregolari, apparentementein modo caotico.
Nel dettaglio, si deve innanzitutto cercare un equivalente per la rete LIF delparametro d'ordine r, che consenta di riconoscere se la rete ha un comportamentosincrono oppure no. Per fare ciò si attribuisce in modo ttizio ad ogni impulsouna larghezza nita (mentre nel modello gli impulsi hanno larghezza nulla, come sivede dall'eq. (2.2), dove la F (t) ha la forma di una δ di Dirac). Questa proceduracorrisponde ad eettuare un coarse-graining dell'attività della rete e permette dicostruire un campo ecace collettivo smooth E. Se si assume che l'impulso abbia laforma F (t) := α2t exp(−αt), ovvero la forma di una cosiddetta αfunction, il campocorrispondente E può essere generato integrando l'equazione:
E + 2αE + α2E =α2
N
∑n|tn<t
δ(t− tn − td). (3.1)
19

Nello scrivere l'equazione (3.1) si è tenuto conto del fatto che siccome il sistemaè globalmente accoppiato, ogni neurone vede lo stesso campo E, dunque l'indice inon è presente.
Questa procedura è correntemente usata per determinare il campo globale per-cepito da ogni singolo neurone, generato dalla sovrapposizione di tutti gli impulsiF (t) = α2te−αt emessi in precedenza dalla rete (si veda ad esempio [14]). Tuttaviain questo caso costituisce solo una strategia per costruire un adeguato parametrod'ordine.
Integrando l'equazione (3.1) si può ricavare E(t), ossia in pratica l'attività dellarete, la grandezza che verrà studiata per denirne il comportamento. È dunquedenibile la media temporale, descritta con il simbolo 〈·〉t, del campo E(t). È pos-sibile ora denire il parametro d'ordine σ come la standard deviation del campo E:σ2 = 〈E2〉t − 〈E〉
2t . Un valore di σ uguale a zero indica un comportamento micro-
scopico asincrono, poiché signica che l'attività della rete è pressoché costante neltempo. Come valore di α, che rappresenta il reciproco della larghezza dell'impulsoF (t), è stato preso α = 20, un valore non troppo grande anché si evitino uttua-zioni statistiche (infatti per α→∞, F → δ), né troppo piccolo da causare eccessivaperdita di informazione (g. 3.1).
Figura 3.1: Andamento in funzione del tempo del campo collettivo E per i valori diα in sovrimpressione [15].
A questo punto si può passare ad analizzare il comportamento dinamico osser-vando la gura 3.2, in cui riportato il valore di σ in funzione di g, per diversi valoridella taglia N . Fino ad un certo valore critico, gc ≈ 0.5, la rete si trova in uno statoasincrono, a meno di un eetto di taglia nita, che diventa sempre più trascurabileman mano che N aumenta. Infatti nel riquadro superiore viene riportato un plot diσ√N e il fatto che rimanga approssimativamente costante signica che σ ∼ 1/
√N .
Oltre il valore gc, invece, si nota un qualche tipo di comportamento oscillatoriocollettivo, testimoniato da un valore di σ diverso da zero e per di più indipendente
20

Figura 3.2: Standard deviation del campo collettivo E in funzione di g per tre diversivalori di N : N = 5750 curva rossa (quadrati), N = 11 500 curva nera (triangoli), eN = 4 600 curva verde (cerchi). Il riquadro superiore contiene il plot descritto neltesto, mentre il riquadro inferiore contiene l'evoluzione del campo E nel tempo perg = 5, con N = 5 750 [6].
Figura 3.3: Particolare dell'evoluzione del campo E nel tempo per g = 5 e perg = 0.2, sempre con N = 5 750. Si noti come per g = 0.2 l'attività della rete siacostante [15].
dalla taglia del sistema. L'esistenza di picchi di attività nel campo E (g. 3.3) cor-risponde a livello microscopico a fenomeni di parziale sincronizzazione. La presenzadi una σ diversa da zero permette di identicare l'esistenza di uttuazioni collettive,ma non ne specica il carattere dinamico. Sono dunque necessarie altre tecniche distudio. È infatti stata costruita una mappa di ritorno dei massimi del campo E, cioèun graco dell'(n+1)-esima altezza del massimo di E in funzione della precedente.Se ad esempio esistesse un comportamento estremamente regolare del campo conmassimi della stessa altezza, l'area colorata dovrebbe tendere ad un punto, mentreinvece riempie una supercie estesa e amorfa, che rimane praticamente invariataaumentando il valore di N .
Ad una conclusione simile si può giungere anche analizzando la trasformata diFourier del campo E(t), da cui si ricava lo spettro di potenza S(ν) di g. 3.5, e incui si riconoscono sì alcune componenti dominanti, ma viene confermata sia l'indi-pendenza dalla taglia, sia una dinamica collettiva irregolare e non periodica. Infattil'ampiezza dei picchi non appare decrescere al crescere di N . Inoltre soltanto unaparte dei picchi di attività può essere spiegata con un agganciamento in frequenza
21

Figura 3.4: Massimi del campo eettivo macroscopico E in funzione del precedente(mappa di ritorno), con g = 5 per N = 11500 (a) e N = 46000 (b) [6].
presente a livello microscopico (cfr. g. 3.7). Questi picchi sono evidenziati dal-le frecce verdi nell'immagine 3.5, ma non bastano, da soli, a spiegare l'insorgenzaspontanea di un'attività oscillatoria collettiva di questo tipo, che è quindi solo inparte riconducibile a fenomeni di sincronizzazione microscopica.
L'origine di tale comportamento irregolare è da ricercarsi principalmente nel fat-to che ci troviamo, come detto, nel transiente. Come illustrato nella gura 3.6, iltransiente necessario per raggiungere un orbita periodica cresce esponenzialmentecon la taglia (la scala delle ordinate è logaritmica) per valori di g sia inferiori chesuperiori a quello di gc. Si noti che il plot è stato possibile, per ovvi motivi computa-zionali, solo per taglie molto basse proprio per questo motivo. Si comprende dunquecome si raggiunga presto nel caso di taglie elevate del sistema si giunga a durate deltransiente di scala astronomica. Si può anche apprezzare nella medesima gurache il tasso di crescita esponenziale diminuisce al crescere di g; questo può esserelegato al fatto che se la forza delle sinapsi è maggiore è più facile raggiungere lo statoperiodico.
In conclusione, seppur il comportamento di g. 3.2 potrebbe ricordare quello delKM di g A.2, nel caso preso in esame vi è una dinamica collettiva caratterizzatada oscillazioni complesse che non sono presenti nel KM.
3.2.2 Comportamento microscopico
La dinamica microscopica della rete considerata è, come si è già detto, non caoti-ca, ovvero l'esponente di Lyapunov massimo diverso da zero è sempre negativo, siaprima che dopo il valore gc, ed è indipendente da N , a dierenza del KM, in cui è
22

Figura 3.5: Spettro di potenza per tre valori di N : N = 5 750 (linea punteggiata),N = 11 500 (linea tratteggiata), N = 46 000 (linea continua), ottenuti trasformandosecondo Fourier il segnale E(t) per una durata temporale di circa 49 300. Le frecceverdi indicano gli agganciamenti in frequenza (citati nel testo), corrispondenti agliagganciamenti in frequenza di g. 3.6 [6].
Figura 3.6: Durata del transiente mediato su varie condizioni iniziali in funzione dellataglia per g = 0.3, 0.7, 1.3, 3, 5 (rispettivamente rombi, cerchi, triangoli, quadrati,asterischi) [6].
23

positivo [16]. Il tempo impiegato dal sistema per raggiungere un'orbita periodica, iltransiente, cresce però esponenzialmente con la taglia e rappresenta perciò il regimedinamico maggiormente rilevante, rispetto a quello rappresentato dall'orbita perio-dica, che si può considerare irraggiungibile. È questo un esempio di stable chaos,un fenomeno già osservato nelle reti inibitorie [7]. Nell'ambito delle neuroscienzelo studio dello stable chaos è sempre più visto con interesse in quanto permette dispiegare l'irregolarità dei pattern degli impulsi di ogni neurone senza fare ricorso alcaos deterministico standard.
Per entrare nel dettaglio della dinamica di singolo neurone si osservi la gura 3.7.Essa rappresenta la frequenza di emissione dei neuroni della rete (ν), in funzione dellafrequenza propria (ν0), con ν0 ∈ [0.558, 2.26], coerentemente con l'intervallo degli ai((ν0)i = 1
ln[aiai−1
]). Le frequenze sono state calcolate facendo per ogni neurone il
reciproco della media degli inter spike intervals (ISI), che rappresentano l'intervallotemporale tra l'emissione di due impulsi consecutivi.
Figura 3.7: Frequenza media di emissione degli impulsi di ogni singolo neurone infunzione della sua frequenza propria (quella cioè che avrebbe il neurone se sconnessodalla rete), per g = 5 e N = 46 000 (linea continua rossa). Le linee orizzontali (pla-teaux ) rappresentano agganciamenti in frequenza particolari di neuroni con frequenzeproprie prossime (si veda spiegazione nel testo). L'area ombreggiata rappresenta leuttuazioni della frequenza. [6]
Si nota immediatamente che la frequenza di emissione in seguito alla presenzadell'accoppiamento impulsivo diminuisce rispetto alla frequenza propria, infatti èsistematicamente inferiore alla bisettrice del quadrante. Ciò è dovuto all'esistenzadell'accoppiamento inibitorio, che rallenta l'attività neurale. Per questo ci sonoaddirittura neuroni che vengono talmente rallentati da non emettere alcun impulso(quelli con ν0 <≈ 1.56, come evidenziato dalla gura 3.7).
24

Nella g. 3.7 si nota l'esistenza di alcuni plateaux (tratti in cui la curva rossaal centro rimane pressoché costante). Essi corrispondono a fenomeni di aggancia-mento in frequenza tra neuroni con frequenze proprie simili. I plateaux più grandi(sottolineati in g. 3.7 dalle linee orizzontali), corrispondono ad armoniche dellafrequenza ν = 0.23, che sono le stesse evidenziate in g. 3.5 dalle frecce verdi.Inoltre la regione ombreggiata intorno alla curva ν = ν(ν0) rappresenta l'ampiezzadelle uttuazioni della frequenza, in particolare la metà dell'altezza verticale dellazona ombreggiata corrisponde a 3 standard deviation di ν. Si noti quindi come l'er-rore sia signicativamente maggiore al di fuori dei plateaux. Ciò testimonia, anchea livello microscopico, un comportamento irregolare di fondo. Aumentando la ta-glia del sistema, l'ampiezza di tali uttuazioni non varia e quindi il comportamentomicroscopico si mantiene irregolare.
Si potrebbe desumere che quest'irregolarità sia dovuta ai neuroni più lenti chehanno dicoltà a raggiungere la soglia, ma in realtà il comportamento non muta,pur eliminando i neuroni meno attivi e quelli che non sparano proprio dalla rete.
Ogni comportamento irregolare nella dinamica collettiva sembra dunque persiste-re anche nel limite termodinamico ed è frutto del disordine sulle frequenze naturalidi oscillazione dei singoli neuroni. È noto infatti in letteratura [17] che in assenza didisordine sulle frequenze dei singoli neuroni, il sistema converge rapidamente versouno stato periodico costituito da due gruppi di neuroni che emettono impulsi ognunoin maniera sincrona (ovvero due cluster). È stato altresì studiato [18] che il numerodei cluster è legato al valore del ritardo, in particolare al diminuire del ritardo siosserva un aumento del numero dei cluster.
25

Conclusioni
L'analisi svolta in questa tesi ha avuto come scopo quello di studiare il compor-tamento dinamico di un modello di rete neuronale eterogenea, analizzato in [6].L'eterogeneità è costituita dal fatto che ogni neurone possiede una diversa frequenzanaturale di emissione degli impulsi. In particolare il modello è formato da una rete dineuroni leaky-integrate-and-re globalmente accoppiati con accoppiamento inibitoriodi tipo impulsivo (dove gli impulsi sono schematizzati come una δ di Dirac). Inoltreè previsto un ritardo tra l'emissione di un impulso da parte di un neurone della reteed il suo ricevimento. Tale ritardo tiene conto della velocità nita di propagazionedel segnale attraverso le sinapsi.
Il comportamento dinamico fondamentale della rete è costituito dal fatto cheall'aumentare della forza dell'accoppiamento sinaptico si assiste ad una transizioneverso uno stato collettivo non banale. In particolare, quando il parametro di ac-coppiamento è inferiore ad un valore critico, i neuroni si trovano in un regime diemissione di impulsi asincrono. Ciò corrisponde ad una attività macroscopica dellarete, costante a meno di uttuazioni dovute alla taglia nita del sistema. Invece, pervalori del parametro di accoppiamento maggiori del suddetto valore critico, l'attivitàneuronale complessiva è non costante e mostra oscillazioni collettive irregolari, nonperiodiche. Si osserva inoltre che, oltre la transizione, anche l'attività microscopicadella rete, ovvero la sequenza di emissione degli impulsi dei singoli neuroni, risultairregolare. L'eetto dell'accoppiamento inibitorio si manifesta a livello microscopicoin una diminuzione della frequenza di emissione degli impulsi dei neuroni collega-ti alla rete, rispetto alla frequenza propria. Alcuni neuroni, i più lenti, risultanoaddirittura silenti, ovvero non emettono mai.
È importante sottolineare le rilevanti dierenze con la transizione al variare del-l'accoppiamento osservata nel modello di Kuramoto, il quale descrive la dinamicadi un insieme di oscillatori di fase accoppiati, e che costituisce il modello paradig-matico per studiare fenomeni di sincronizzazione. Innanzitutto, la transizione quiosservata non corrisponde ad una semplice sincronizzazione degli oscillatori, ma visono oscillazioni irregolari collettive che emergono spontaneamente e che solo par-zialmente sono riconducibili a fenomeni di sincronizzazione in frequenza di neuronicon frequenza propria simile. Inoltre, il modello qui studiato è non caotico e quindiil sistema converge asintoticamente verso uno stato periodico. Tuttavia il temponecessario al raggiungimento dell'orbita periodica (ovvero il transiente) cresce espo-nenzialmente con il numero dei neuroni. Ciò signica che per popolazioni grandi dineuroni, come quelle studiate in questa tesi, il regime dinamico rilevante è quellodel transiente, piuttosto che l'orbita periodica raggiunta su scale di tempo astrono-miche e quindi praticamente irraggiungibile. Questo particolare regime dinamico è
26

un esempio del cosiddetto stable chaos [7], un fenomeno osservato anche con riferi-mento ad altri sistemi dinamici in contesti diversi. Nell'ambito delle neuroscienzelo studio dello stable chaos è sempre più visto con interesse in quanto permette dispiegare l'irregolarità dei pattern degli impulsi di ogni neurone senza fare ricorso alcaos deterministico standard.
È importante anche rilevare che il comportamento osservato oltre la transizionesi mantiene invariato all'aumentare della taglia del sistema, ed è in ultima istanzadovuto al disordine sulle frequenze naturali di oscillazione dei singoli neuroni.
Si può dunque concludere che, anche utilizzando un modello di singolo neurone edun modello di rete semplicato, come quello proposto, per eetto dell'eterogeneitàsi possono ottenere comportamenti dinamici complessi. Tali comportamenti pos-sono contribuire a spiegare i meccanismi alla base dell'insorgenza delle oscillazionicollettive non banali osservate nella corteccia cerebrale.
Futuri sviluppi del modello potrebbero prevedere l'analisi del regime dinamico alvariare della larghezza temporale degli impulsi emessi dai neuroni.
27

Appendice A
Il modello di Kuramoto
Il modello di Kuramoto è un modello di oscillatori di fase globalmente accoppiaticon accoppiamento di tipo diusivo, ovvero a dierenza delle reti con accoppiamentoimpulsivo LIF, gli oscillatori percepiscono l'eetto dell'accoppiamento ad ogni istantedi tempo. La dinamica di ogni oscillatore è descritta dalle seguenti equazioni:
dθidt
= ωi +k
N
N∑j=1
sin (θj − θi) i = 1, ..., N, (A.1)
dove ωi è la frequenza propria di oscillazione di ogni nodo della rete, θi la sua fase,k la forza dell'accoppiamento e N , come al solito, la taglia della rete.
La particolarità e l'importanza di questo modello sono dovute al fatto che èrisolvibile esattamente, almeno nel limite termodinamico, tramite un'opportuna so-stituzione, che però non verrà trattata in questa sede. Per studiare il comportamentocollettivo della rete è utile introdurre il parametro d'ordine r, e la fase media ψ, cosìdeniti:
reiψ =1
N
N∑j=1
eiθj . (A.2)
Il parametro r è importante in quanto fornisce informazione sulla sincronizza-zione della rete. Infatti, essendo il modulo di un vettore che somma tutti i vettoriposizione degli elementi della rete, disposti sul cerchio unitario, in caso di totale sin-cronizzazione esso sarà pari al valore 1, mentre al contrario in caso di un comporta-mento del tutto asincrono esso tenderà a 0 (per comprendere meglio il ragionamentosi confrontino le gg. A.1 a) e b).
La gura A.2 mostra il comportamento dinamico di una rete KM attraversol'andamento del parametro d'ordine, al variare della forza dell'accoppiamento. Inparticolare si vede che per valori di k inferiori al valore critico kc si ha una dinamicaasincrona (r ∼ 0), mentre per k > kc si ha una parziale sincronizzazione (0 < r < 1)no a giungere ad una completa sincronizzazione per valori sempre più grandi di k.
28

(a) (b)
Figura A.1: (a) Sincronizzazione massima degli elementi di una rete KM. (b) Assenzadi sincronizzazione degli elementi di una rete KM.
Figura A.2: Dinamica globale del modello di Kuramoto: parametro d'ordine alvariare del parametro di accoppiamento k.
29

Appendice B
Gli esponenti di Lyapunov
L'analisi dell'esponente di Lyapunov massimo di un sistema dinamico è un metodolargamente diuso per avere un'indicazione quantitativa sul comportamento del si-stema riguardo all'evoluzione asintotica nel tempo di una perturbazione innitesimadelle sue condizioni iniziali.
Detto in termini semplicati gli esponenti di Lyapunov caratteristici misuranoil tipico tasso di divergenza esponenziale di traiettorie vicine tra loro. In questosenso danno un'informazione sul tasso di crescita di un errore innitesimo sullostato iniziale del sistema.
Si abbia dunque un sistema dinamico a tempo continuo, come nel caso delmodello studiato, la cui evoluzione sia denita dal seguente sistema di equazionidierenziali:
dx
dt= F(x), (B.1)
dove con le lettere in grassetto si sono indicate le grandezze vettoriali, nel nostro casodi dimensione N (taglia del sistema). Si suppone che la funzione F sia dierenziabile,che l'evoluzione temporale sia ben denita anche per intervalli di tempo tendentiall'innito e che il moto avvenga in una regione limitata dello spazio delle fasi.L'intento è quello di studiare l'evoluzione della dierenza tra due traiettorie x(t) ex′(t) che abbiano origine da due condizioni iniziali vicine tra loro, x(0) e x′(0) =
x(0) + δx(0), rispettivamente.Si supponga che la dierenza tra le traiettorie δx(t) = x′(t) − x(t) rimanga
innitesima anche al tempo t, allora essa può essere vista come un vettore, z(t)
appartenente allo spazio tangente. L'evoluzione nel tempo di z(t) è dunque ottenutalinearizzando le equazioni (B.1):
dz(t)
dt= ∇F · z(t) (B.2)
È stato dimostrato da Oseledec [19], che per quasi tutte le condizioni iniziali x(0),esiste una base ortonormale ei nello spazio tangente, tale che, per tempi lunghi:
z(t) =N∑i=1
cieieλit, (B.3)
dove i coecienti ci dipendono da z(0). Gli esponenti ordinati λ1 ≥ λ2 ≥ · · · ≥ λN ,
30

sono chiamati esponenti di Lyapunov caratteristici. Dall'equazione (B.3) sembrereb-be che gl esponenti di Lyapunov dipendano dalle condizioni iniziali. Il teorema diOseledec [19] assicura però, sotto ipotesi molto generali, che lo spettro degli esponen-ti di Lyapunov non dipende dalla condizione iniziale, eccetto che per un insieme dipunti di misura di Lebegue nulla. Possiamo dunque parlare di esponenti di Lyapunovsenza riferirsi alle speciche condizioni iniziali.
L'equazione (B.3) in parole povere signica che nello spazio delle fasi una sferaN -dimensionale di raggio piccolo ε centrata in x(0) (ovvero l'incertezza sulle con-dizioni iniziali), viene deformata in un'ellissoide di semiassi εi = εexp(λit), direttisecondo i vettori della base ei. Inoltre la distanza tra la traiettoria originaria e quellaperturbata evolve approssimativamente come:
|δx(t)| ∼ |δx(0)|eλ1t[1 +O(e−(λ1−λ2)t)], (B.4)
per cui si ha una sensitività esponenziale sulle condizioni iniziali. Dalla relazione(B.4) si nota immediatamente che se λ1, cioè l'esponente di Lyapunov massimo delsistema, è strettamente positivo si ha una rapida (esponenziale) amplicazione diun errore sulle condizioni iniziali. In tal caso il sistema si dice caotico, e risulta difatto imprevedibile su lunghe scale di tempo (ciò accade per esempio nel sistemadinamico che regola il tempo atmosferico). Infatti se si vuole prevedere lo stato delsistema con una certa tolleranza ∆, auspicabilmente sucientemente piccola anchéla previsione sia utile, in seguito ad un'incertezza iniziale |δx(0)|, esiste un tempolimite Tp entro cui la previsione è possibile. Esso è denito invertendo l'equazione(B.4):
Tp ∼1
λ1ln
(∆
|δx(0)|
). (B.5)
Anche da questa equazione si nota come dunque il ruolo più importante sia svol-to, anche nella determinazione di Tp, dall'esponente di Lyapunov massimo, poichéla dipendenza dalle altre variabili è molto debole. Perciò λ1 viene semplicementeindicato con λ e detto l'esponente di Lyapunov del sistema.
Nel caso in cui l'esponente di Lyapunov massimo sia uguale a zero è necessariofare una precisazione che giustica il fatto che nel testo sia stato in precedenza con-siderato sempre l'esponente di Lyapunov massimo diverso da zero. Il motivo è che,se l'attrattore del sistema dinamico è diverso da un punto di equilibrio, esiste semprealmeno un esponente di Lyapunov caratteristico uguale a 0. Questo perché se pren-do un'incertezza iniziale che giace lungo la direzione tangente al usso, cioè lungola direzione della traiettoria, essa non è né smorzata, né amplicata, poiché seguela traiettoria, e dunque l'asse principale dell'ellissoide tangente al usso è associatoad un esponente uguale a zero. In questo caso dunque si considera l'esponente diLyapunov massimo diverso da zero, e se esso è negativo siamo in presenza di unostato non caotico.
31

Bibliograa
[1] W.R. Softky e C. Koch, J. Neuroscience 13, 334 (1993).
[2] K. D. Harris e A. Thiele, Nat. Rev. Neurosci. 12, 509 (2011).
[3] G. Buzsáki, Rhythms of the Brain, Oxford University Press 2006.
[4] G.Buzsáki, Neuroscience 31, 551 (1989).
[5] L. Maei, La libertà di essere diversi. Natura e cultura alla prova delle
neuroscienze, il Mulino, Bologna 2013.
[6] S. Luccioli, A. Politi, Physical Review Letters, 105, 158104 (2010).
[7] A. Politi e A. Torcini, Stable Chaos, in Nonlinear Dynamics and Chaos, Springer-Verlag, Heidelberg, 2010.
[8] W. Gerstner e W. Kistler, Spiking Neuron Models, Cambridge University Press,Cambridge (2002).
[9] Ramòn y Cajal, Histologie du Système Nerveux de l'Homme et des Vertébrés, A.Maloine, Parigi (1909).
[10] J.G. Nicholss, R.A. Martin e B.G. Wallace, Dai Neuroni al cervello, Zanichelli,Bologna (1997).
[11] D. Johnston e S. Miao-Sin Wu, Foundations of Cellular Neurophysiology,Massachusetts Institute of Technology: Cambridge, Massachusetts (1995).
[12] D.K .S. Smetters, Electrotonic structure and synaptic integration in
cor- tical neurons, Massachusetts Institute of Technology: Cambridge,Massachusetts(1995).
[13] C. Koch, Biophysics of computation, Oxford University Press, New York (1999).
[14] L. F. Abbott e C. van Vreeswijk, Physical Review E 48, 1483 (1993).
[15] S. Luccioli, comunicazione privata (2014).
[16] O. V. Popovich, Y. L. Maistrenko e P. A. Tass, Physical Review E 71, 065201(R)(2005).
[17] R. Zillmer, N. Brunel and D. Hansel, Phys. Rev. E 79, 031909 (2009).
[18] U. Ernst, K. Pawelzik, and T. Geisel, Phys. Rev. Lett. 74, 1570 (1995).
32

[19] V. I. Oseledec, A multiplicative ergodic theorem: Lyapunov characteristic
numbers for dynamical systems, Trans Moscow Math. Soc. 19 197 (1968).
33