collaborative robotics and wireless sensor networks in area-coverage related problems john...
Post on 19-Dec-2015
218 views
TRANSCRIPT
Collaborative Robotics and Wireless Sensor Networks in Area-Coverage related Problems
John Stergiopoulos
Dept. Elect. & Comp. Eng.Univ. of Patras, [email protected]
Anthony Tzes
Dept. of Elect. & Comp. Eng.Univ. of Patras, [email protected]
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Presentation Layout
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part I
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
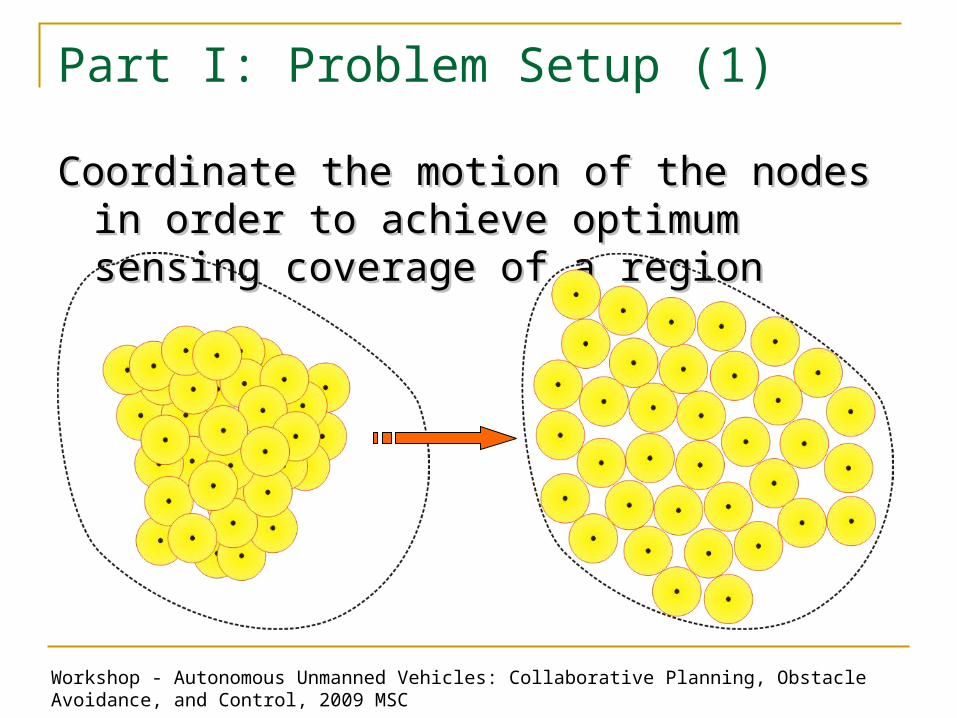
Part I: Problem Setup (1)
Coordinate the motion of the nodes in order to Coordinate the motion of the nodes in order to achieve optimum sensing coverage of a regionachieve optimum sensing coverage of a region
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
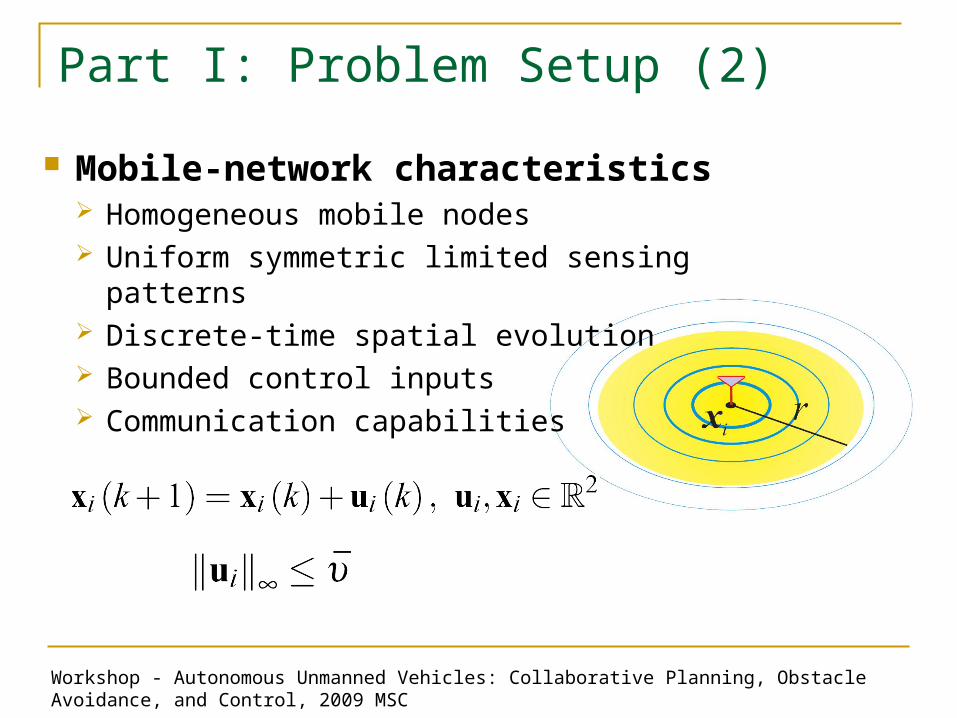
Part I: Problem Setup (2)
Mobile-network characteristics Homogeneous mobile nodes Uniform symmetric limited sensing patterns Discrete-time spatial evolution Bounded control inputs Communication capabilities
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part I: Problem Setup (3)
Optimization cost :
No analytic expression exists for the cost function
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part II
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part II: Optimization Techniques (1)
Offline global optimization
Ω, n, r Optimal network configuration
Path planning needed for achieving optimal positioning
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part II: Optimization Techniques (2)
Computationally intensive (even for small n) Non-adaptive
change in the region of interest (Ω) network alteration (n, r)
Exhaustive search (…) “Genetic algorithms”-based strategies
… however …
re-perform optimization (!)
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part II: Optimization Techniques (3)
Online optimization strategies Each node self-organizes its action so that its motion
contributes to netwok coverage Decision taken is based on local information No path planning needed; the nodes will self-position
themselves accordingly through time
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part II: Optimization Techniques (4)
Gradient-based techniques Huge/infinite number of local extrema Convergence to locally-optimum positions
Adaptive by nature Applicable in real-time scenarios
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part III
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
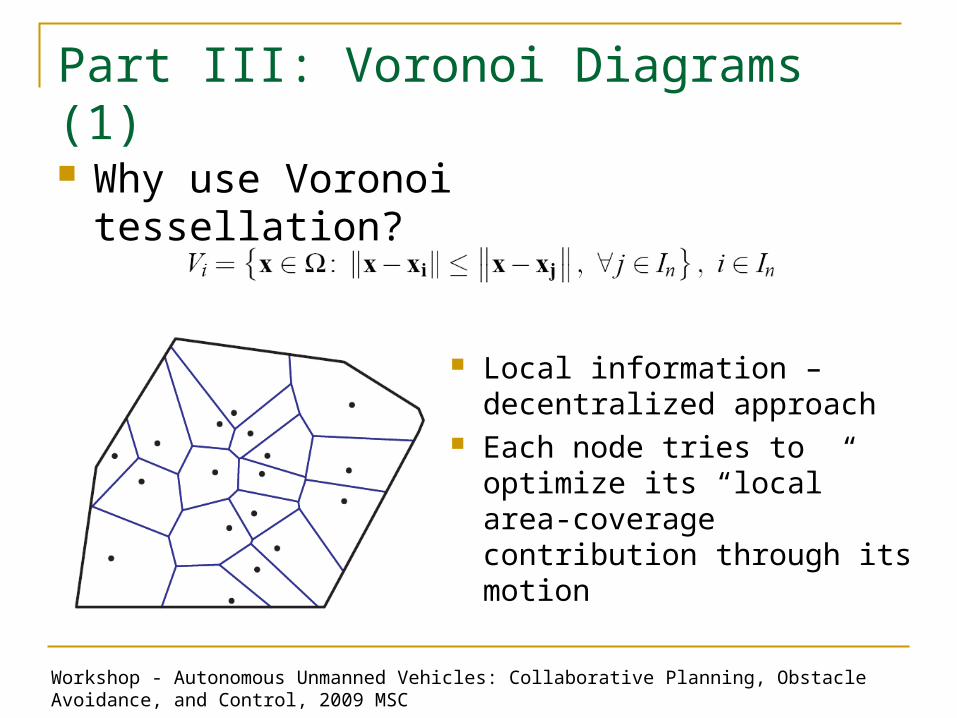
Part III: Voronoi Diagrams (1)
Why use Voronoi tessellation?
Local information – decentralized approach
Each node tries to optimize its “local” area-coverage contribution through its motion
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part III: Voronoi Diagrams (2)
Optimize “local” coverage contribution Motion of one node at a time is required
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part IV
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part IV: Generalized Coverage Algorithm (1)
Main concept
One node moves at each time-step to ensure network’s area-coverage monotonicity, while avoiding oscillatory phenomena
Direction at which a node should move inside its Voronoi cell is defined according to “coverage-increase” criteria
Unless its motion contributes to coverage, the node does not move
Stability of the network’s motion is guaranteed
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part IV: Generalized Coverage Algorithm (2)
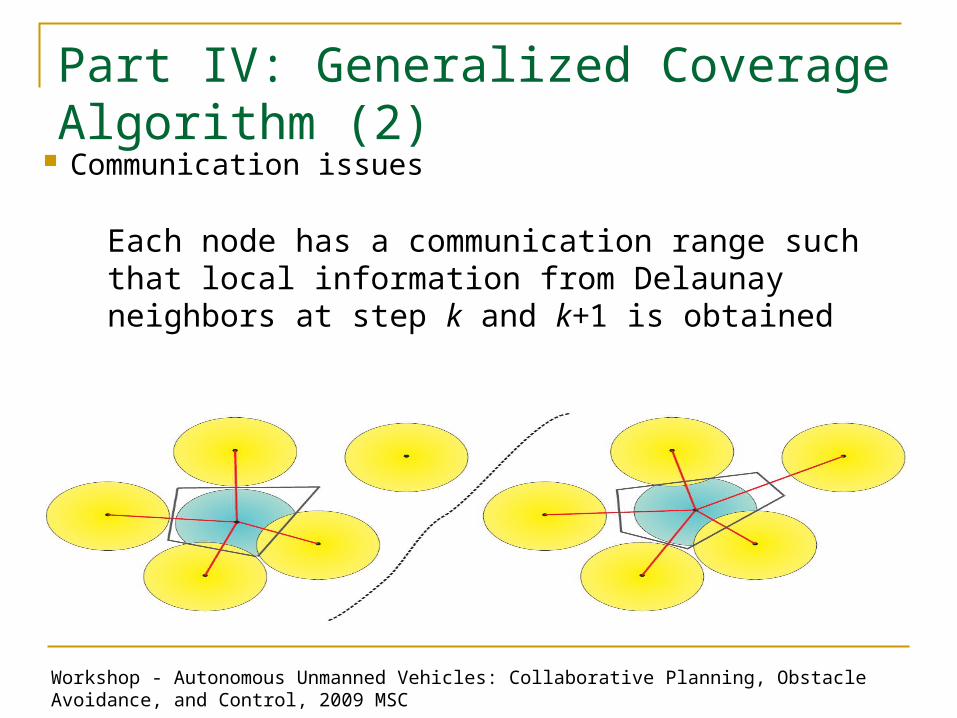
Communication issues
Each node has a communication range such that local information from Delaunay neighbors at step k and k+1 is obtained
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part IV: Generalized Coverage Algorithm (3)
Compute own Voronoi cell (local information – Delaunay neighbors)
Compute current “local” area-coverage Define the direction at which to move Predict area-coverage at step k+1, if motion is performed
at this direction Move only if coverage is to be increased
Node i is to move at step k
How is the selection of the node-to-move performed?
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part IV: Generalized Coverage Algorithm (4)
Centralized approach
step kstep k-1
Need for global supervision Communication issues arise
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part IV: Generalized Coverage Algorithm (5)
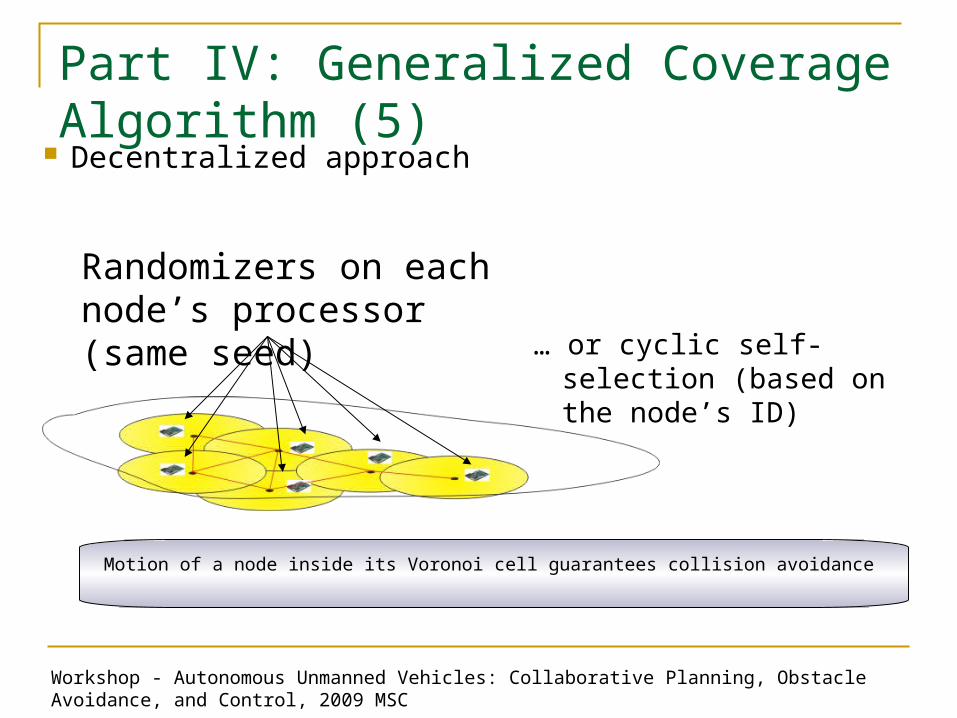
Decentralized approach
… or cyclic self-selection (based on the node’s ID)
Randomizers on each node’s processor (same seed)
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Motion of a node inside its Voronoi cell guarantees collision avoidance
Part V
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part V: Coordination Schemes (1)
At each step, a node performs an optimization to define the direction to move towards
Optimal direction is the one that leads to maximum area-coverage contribution at the next step, considering its Delaunay neighbors
ε-maneuvers are performed, so that the Voronoi cell does not alter significantly
Steepest-descent scheme
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part V: Coordination Schemes (2)
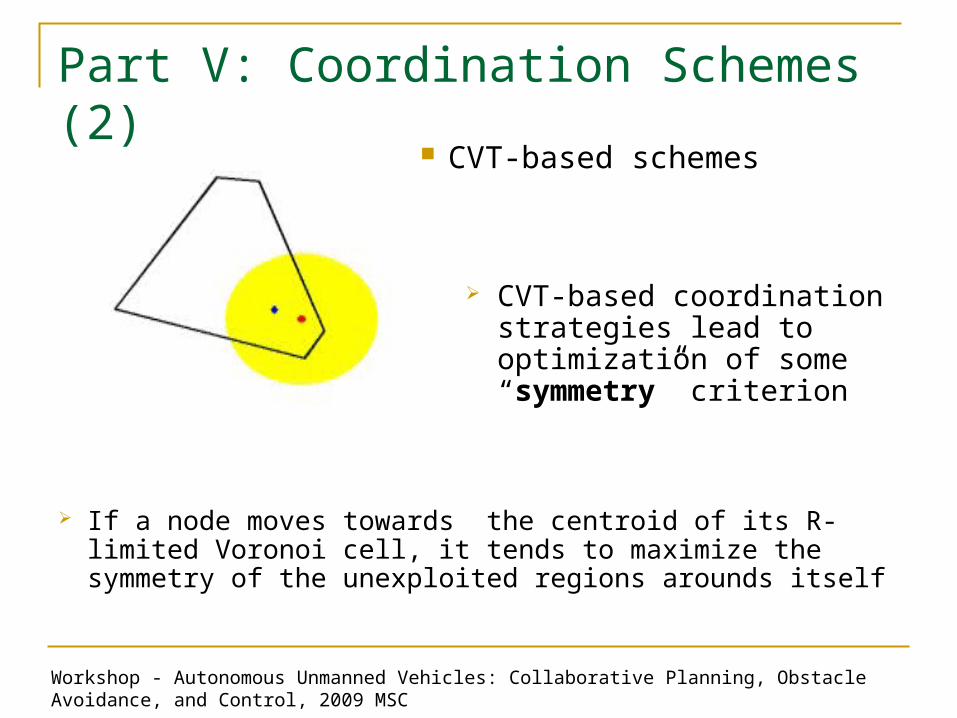
CVT-based coordination strategies lead to optimization of some “symmetry” criterion
CVT-based schemes
If a node moves towards the centroid of its R-limited Voronoi cell, it tends to maximize the symmetry of the unexploited regions arounds itself
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part V: Coordination Schemes (3)
Since the unexploited regions of a node act as repulses, when the latter is moving towards , the algorithm is coverage-oriented
A node moves towards iff its coverage contribution will increase
One-step-ahead prediction ensures area-coverage monotonicity
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part VI
Problem Setup Optimization Techniques Voronoi Diagrams Generalized Coverage Algorithm Coordination Schemes Simulation Studies
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
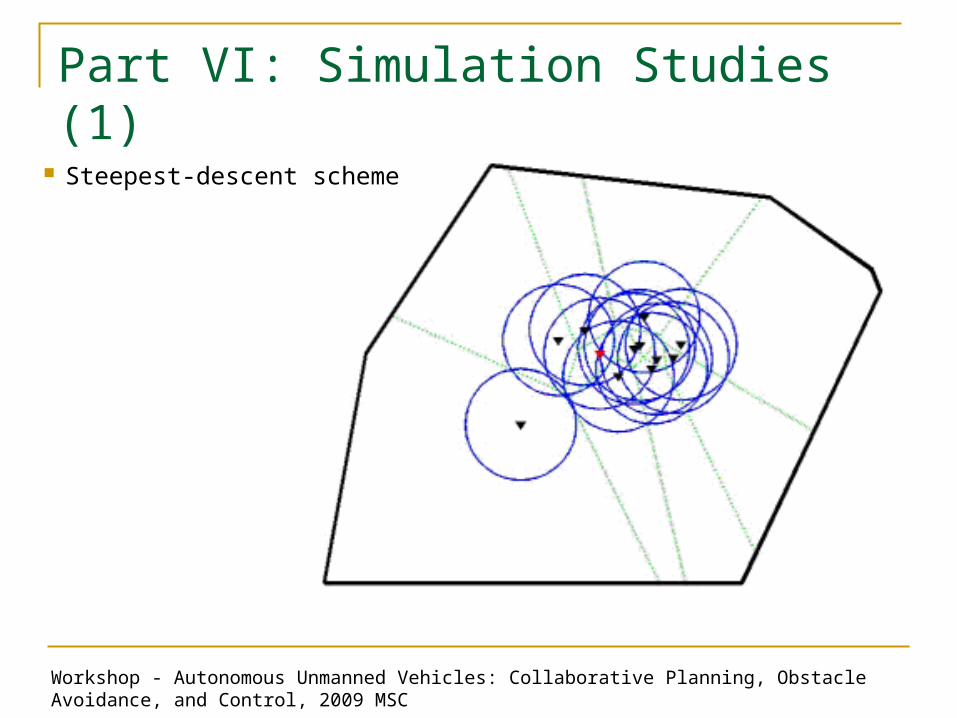
Part VI: Simulation Studies (1)
Steepest-descent scheme
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part VI: Simulation Studies (2)
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
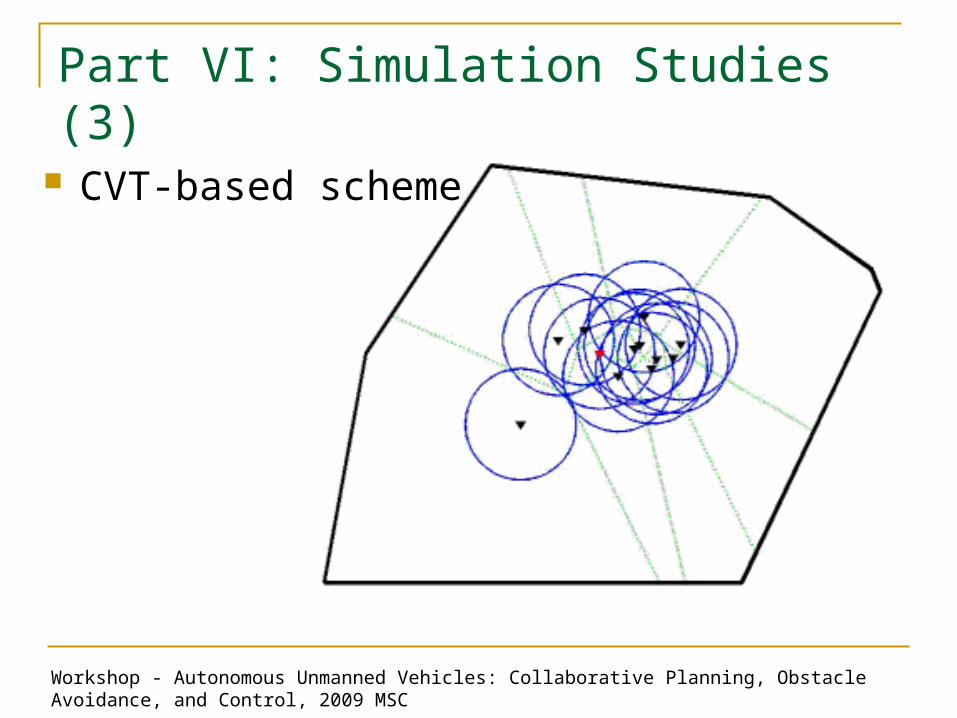
Part VI: Simulation Studies (3)
CVT-based scheme
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC

Part VI: Simulation Studies (4)
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
Part VI: Simulation Studies (5)
In both cases, the pecentage area-coverage is a monotonically increasing function of time
In the “deepest-descent” case, maximum coverage is obtained faster than in the CVT-based scenario (rational, considering the nature of the algorithm)
The network tends to keep itself more cohesive via the CVT-based scheme (“move towards ”), while μicro-maneuvers are performed by the nodes when the network’s state is near-to-optimal
Workshop - Autonomous Unmanned Vehicles: Collaborative Planning, Obstacle Avoidance, and Control, 2009 MSC
