collaborative operations in denied environment … documents/2016 is... · collaborative operations...
TRANSCRIPT

Collaborative Operations in DeniedEnvironment (CODE) Program Overview
Jean-Charles (J.C.) Ledé, Program ManagerTactical Technology Office (TTO)
April 18-19, 2016
1
Briefing Prepared for SPIE Defense + Security Symposium –Sensors and Command, Control, Communications and Intelligence (C3I) Technologies
for Homeland Security, Defense, and Law Enforcement Applications XV Conference
Distribution Statement A: Approved for Public Release, Distribution Unlimited
2
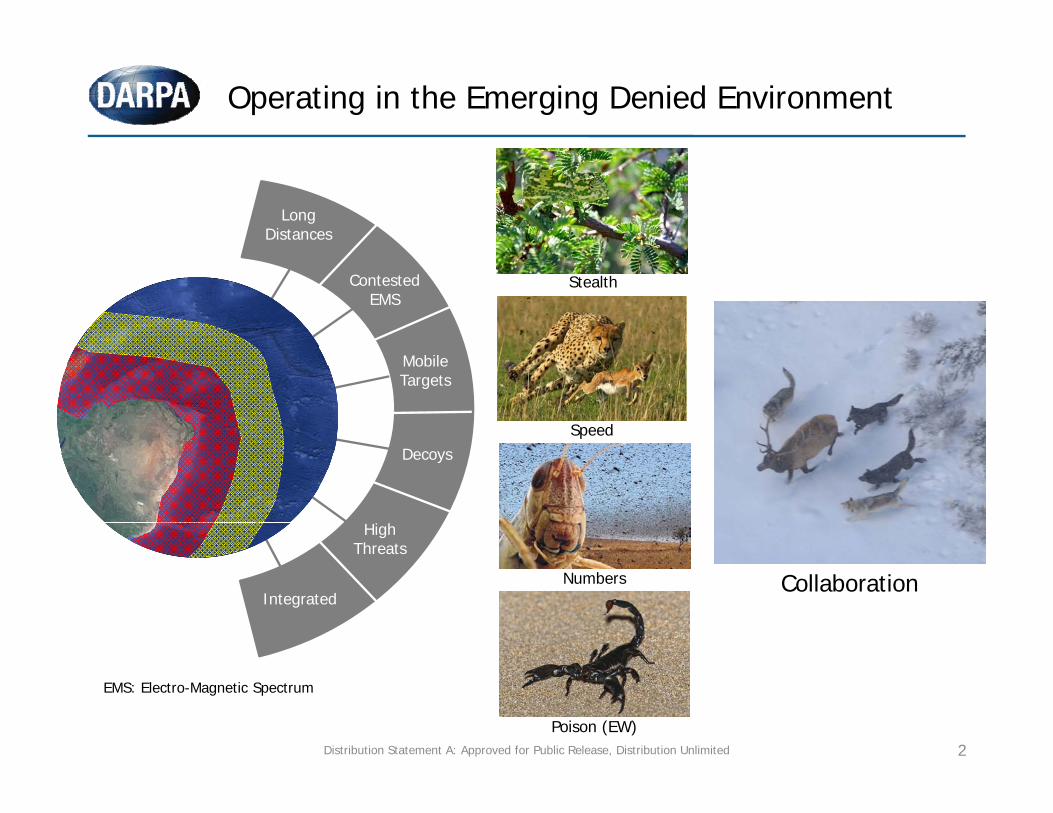
Operating in the Emerging Denied Environment
EMS: Electro-Magnetic Spectrum
Stealth
Speed
Numbers
Poison (EW)
Collaboration
Long Distances
Contested EMS
Mobile Targets
High Threats
Integrated
Decoys
Distribution Statement A: Approved for Public Release, Distribution Unlimited
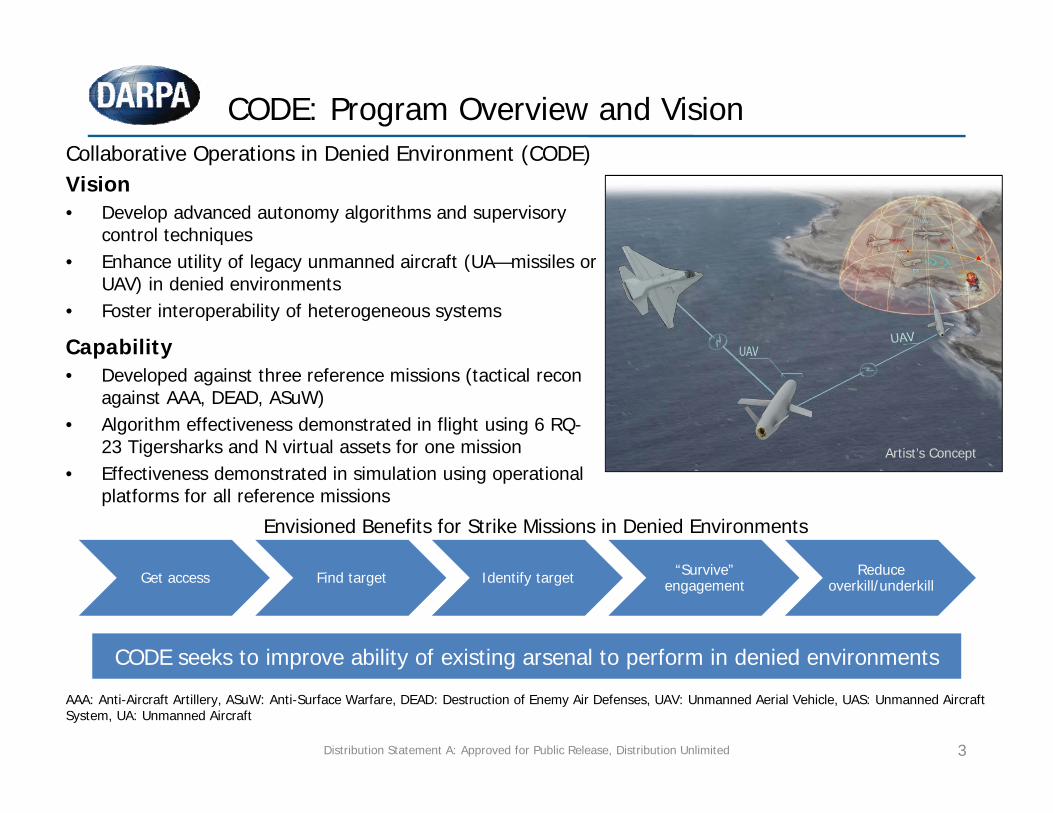
Capability• Developed against three reference missions (tactical recon
against AAA, DEAD, ASuW)• Algorithm effectiveness demonstrated in flight using 6 RQ-
23 Tigersharks and N virtual assets for one mission• Effectiveness demonstrated in simulation using operational
platforms for all reference missions
Get access Find target Identify target “Survive” engagement
Reduce overkill/underkill
3
CODE: Program Overview and Vision
Envisioned Benefits for Strike Missions in Denied Environments
Collaborative Operations in Denied Environment (CODE) Vision• Develop advanced autonomy algorithms and supervisory
control techniques• Enhance utility of legacy unmanned aircraft (UA—missiles or
UAV) in denied environments• Foster interoperability of heterogeneous systems
CODE seeks to improve ability of existing arsenal to perform in denied environments
AAA: Anti-Aircraft Artillery, ASuW: Anti-Surface Warfare, DEAD: Destruction of Enemy Air Defenses, UAV: Unmanned Aerial Vehicle, UAS: Unmanned Aircraft System, UA: Unmanned Aircraft
Distribution Statement A: Approved for Public Release, Distribution Unlimited
Artist’s Concept

Four Pillars, Three Missions, Spiral Development
Anti–Surface Warfare
Collaborative Autonomy
Vehicle-Level Autonomy
Supervisory Interface
Open Architecture for
Distributed System
4
Armed Reconnaissance
Destruction of Enemy Air Defense
Artist’s Concept
Concept validationthrough simulation
- operational system design
- critical technology
development
FY15
FY16
FY17
FY18
Phase 1
Phase 2
Phase 3
Initial S/W development limited flight
test with 1 or 2 A/C
End-to-end flight demo using 6 live +n virtual
assets emulating GPS and commsdenial
Artist’s Concept
Distribution Statement A: Approved for Public Release, Distribution UnlimitedPlanned schedule
Open Mission Systems

5
• Collaborative sensing tactics• Collaborative strike tactics• Collaborative communication tactics• Collaborative navigation techniques• Formation flight• Multi-constraints auto-routing• Bandwidth reduction
• Mission-sensitive compression• Value of information• Health monitoring• Behavior modeling
Advancements in Autonomy
Targeting
Airborne relay
Mobile control station
Manned-unmanned teaming
Coordinated support
Multi-INT search and track
Artist’s concepts
Distribution Statement A: Approved for Public Release, Distribution Unlimited
Collaborative landmark-based navigation
Artist’s Concept
Distribution Statement A: Approved for Public Release, Distribution Unlimited 6
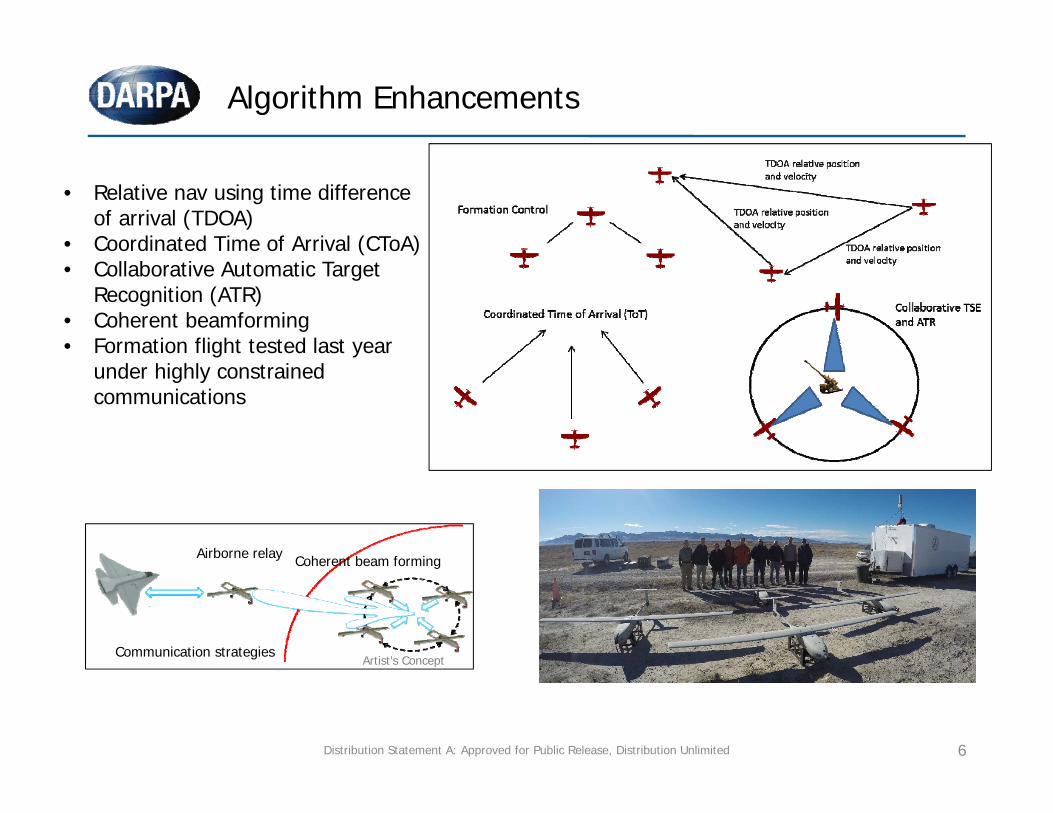
Algorithm Enhancements
Coherent beam formingAirborne relay
Communication strategiesArtist’s Concept
• Relative nav using time difference of arrival (TDOA)
• Coordinated Time of Arrival (CToA)• Collaborative Automatic Target
Recognition (ATR)• Coherent beamforming• Formation flight tested last year
under highly constrained communications
Distribution Statement A: Approved for Public Release, Distribution Unlimited 7
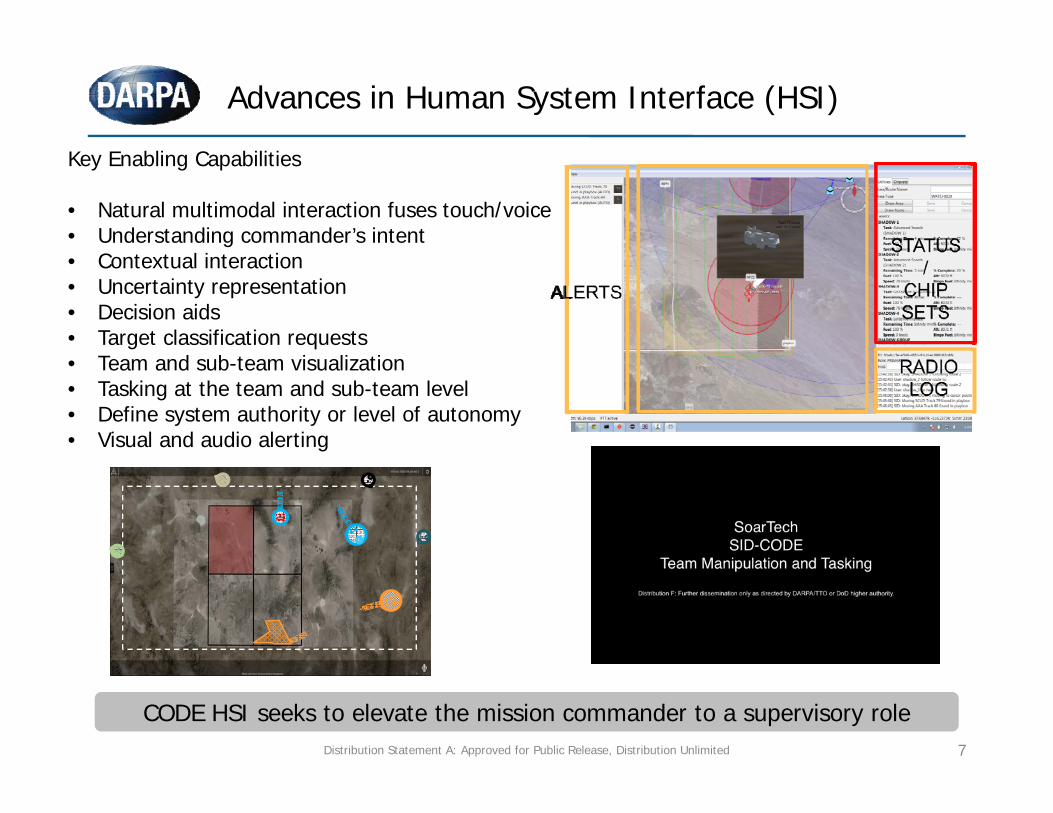
Advances in Human System Interface (HSI)
Key Enabling Capabilities
• Natural multimodal interaction fuses touch/voice• Understanding commander’s intent• Contextual interaction• Uncertainty representation• Decision aids• Target classification requests• Team and sub-team visualization• Tasking at the team and sub-team level• Define system authority or level of autonomy• Visual and audio alerting
CODE HSI seeks to elevate the mission commander to a supervisory role
Distribution Statement A: Approved for Public Release, Distribution Unlimited 8
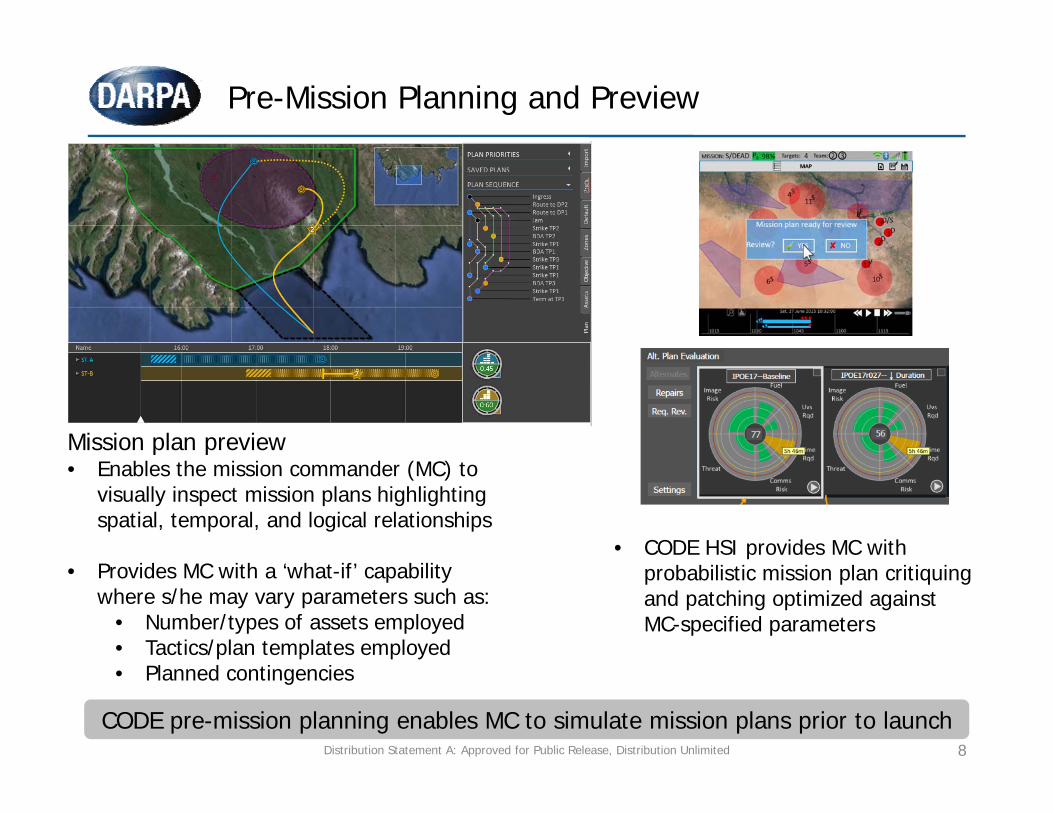
Pre-Mission Planning and Preview
• CODE HSI provides MC with probabilistic mission plan critiquing and patching optimized against MC-specified parameters
Mission plan preview• Enables the mission commander (MC) to
visually inspect mission plans highlighting spatial, temporal, and logical relationships
• Provides MC with a ‘what-if’ capability where s/he may vary parameters such as:
• Number/types of assets employed• Tactics/plan templates employed• Planned contingencies
CODE pre-mission planning enables MC to simulate mission plans prior to launch
• Leverage a broad community of interest in developing autonomy• Create an environment for continuous improvement and open competition with no
barriers to entry• Exploit ongoing government-industry open architecture development
Why Open Architecture for CODE?
9
• An open architecture for the CODE system seeks to enable:
• Adaptability• Rapid integration• Transition through testability, White Force
Network (WFN)
• White Force Network enables injection of:• Virtual air vehicles (AV), virtual threats, and
virtual targets• Mission contingencies
• Simulated loss of GPS and/or communications
• Other mission failures simulated
Artist’s Concept
Distribution Statement A: Approved for Public Release, Distribution Unlimited
10
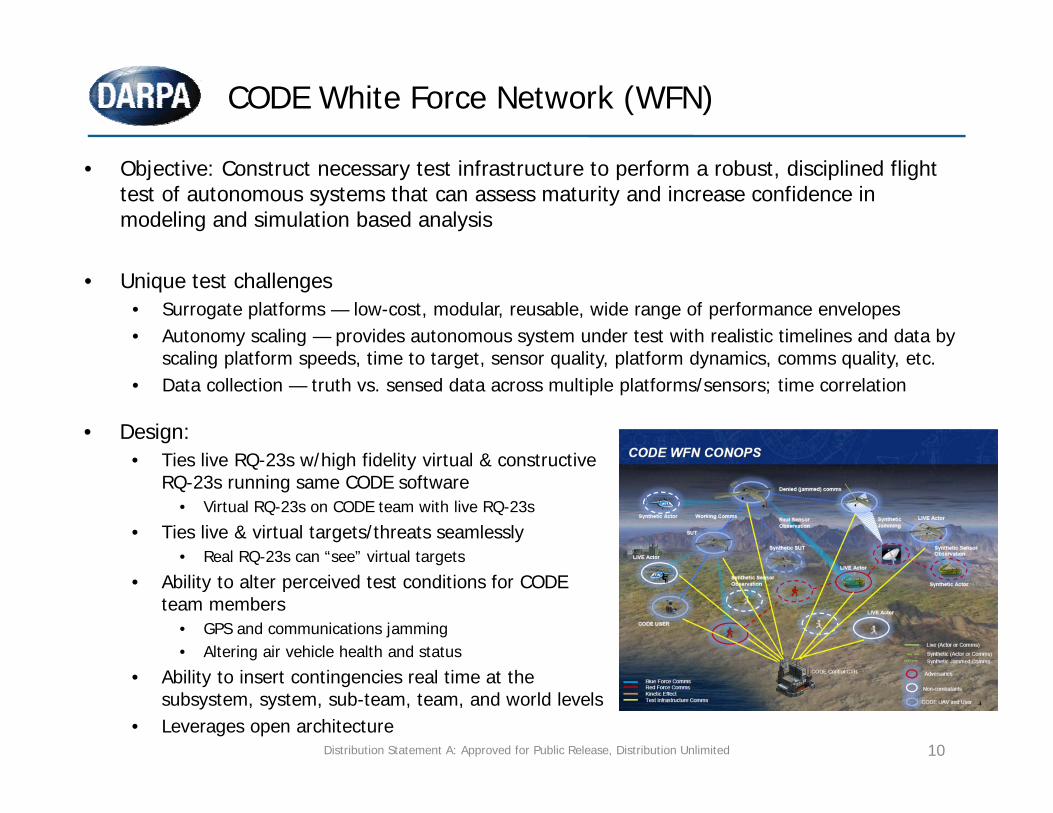
CODE White Force Network (WFN)
• Objective: Construct necessary test infrastructure to perform a robust, disciplined flight test of autonomous systems that can assess maturity and increase confidence in modeling and simulation based analysis
• Unique test challenges• Surrogate platforms — low-cost, modular, reusable, wide range of performance envelopes• Autonomy scaling — provides autonomous system under test with realistic timelines and data by
scaling platform speeds, time to target, sensor quality, platform dynamics, comms quality, etc.• Data collection — truth vs. sensed data across multiple platforms/sensors; time correlation
• Design:• Ties live RQ-23s w/high fidelity virtual & constructive
RQ-23s running same CODE software• Virtual RQ-23s on CODE team with live RQ-23s
• Ties live & virtual targets/threats seamlessly• Real RQ-23s can “see” virtual targets
• Ability to alter perceived test conditions for CODE team members
• GPS and communications jamming• Altering air vehicle health and status
• Ability to insert contingencies real time at the subsystem, system, sub-team, team, and world levels
• Leverages open architectureDistribution Statement A: Approved for Public Release, Distribution Unlimited

Distribution Statement A: Approved for Public Release, Distribution Unlimited 11
Fast Lightweight Autonomy (FLA)
Mr. Jean-Charles (JC) LedéProgram Manager, Defense Sciences Office (DSO)
August 2, 2016
12
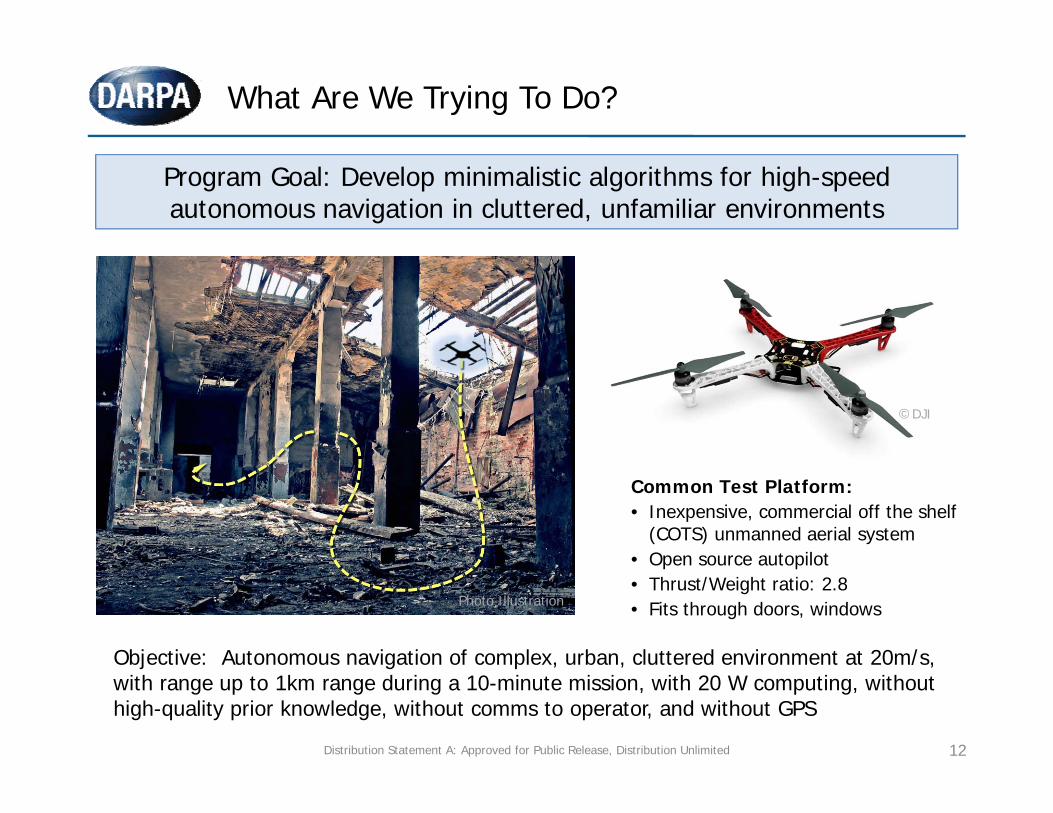
What Are We Trying To Do?
Program Goal: Develop minimalistic algorithms for high-speedautonomous navigation in cluttered, unfamiliar environments
Objective: Autonomous navigation of complex, urban, cluttered environment at 20m/s, with range up to 1km range during a 10-minute mission, with 20 W computing, without high-quality prior knowledge, without comms to operator, and without GPS
Common Test Platform:• Inexpensive, commercial off the shelf
(COTS) unmanned aerial system• Open source autopilot• Thrust/Weight ratio: 2.8• Fits through doors, windows
Distribution Statement A: Approved for Public Release, Distribution Unlimited
©DJI
Photo Illustration

Distribution Statement A: Approved for Public Release, Distribution Unlimited
FLA – New Approaches and Outcomes
• Behaviors – Develop tightly coupled control algorithms for extreme maneuverability required to fly through windows, doors, confined spaces
• Representation – Explore time-to-contact and topological connectivity knowledge representations rather than volumetric grid of spatial layout
• Perception – Algorithms to quickly recognize previously visited areas using room features to answer “have I been here before?”
• Use only post-hoc analysis of data to reconstruct features, create maps, etc.
13
COTS i7 Processor- Algorithms- Control
COTS Camera - High frame rate- Global shutter- Obstacle detection
COTS Single Point Laser Range Finder
- Altitude
COTS Pixhawk Autopilot
- Low level control- Safety
COTS Inertial Sensor
- Pose- Odometry
13
Example Flight Platform
Distribution Statement A: Approved for Public Release, Distribution Unlimited 14
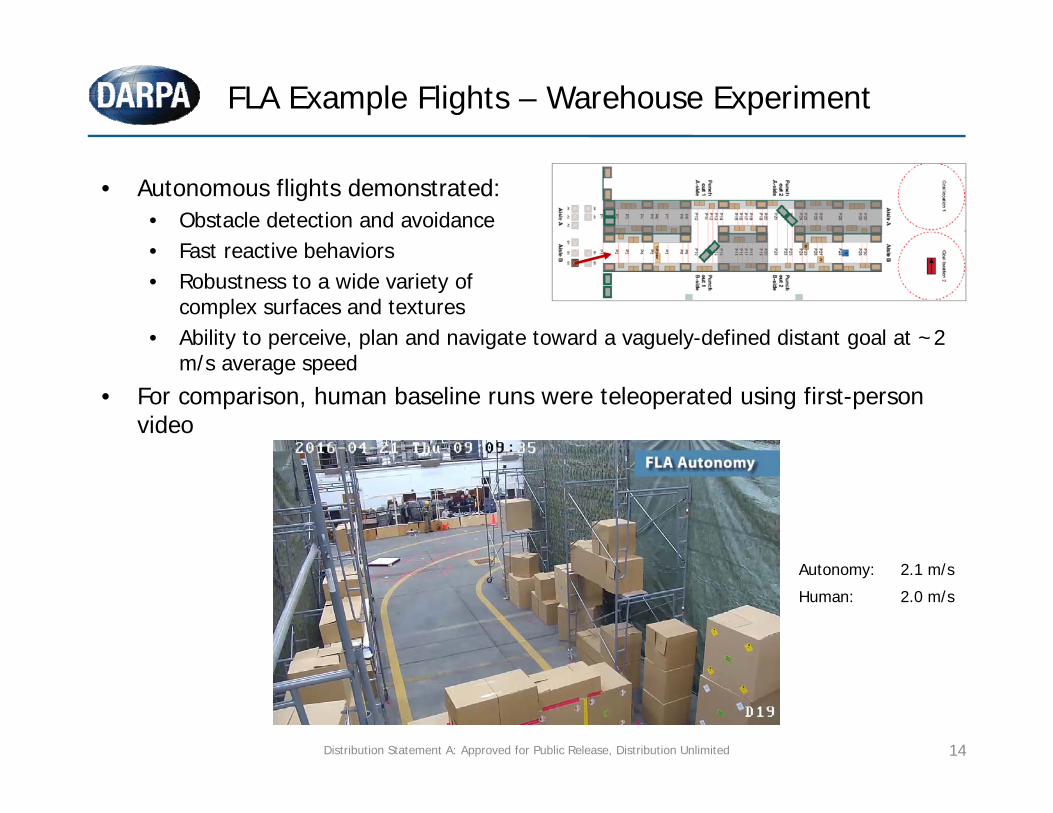
• Autonomous flights demonstrated:• Obstacle detection and avoidance• Fast reactive behaviors• Robustness to a wide variety of
complex surfaces and textures• Ability to perceive, plan and navigate toward a vaguely-defined distant goal at ~2
m/s average speed
• For comparison, human baseline runs were teleoperated using first-person video
FLA Example Flights – Warehouse Experiment
Autonomy: 2.1 m/s
Human: 2.0 m/s
Distribution Statement A: Approved for Public Release, Distribution Unlimited 15
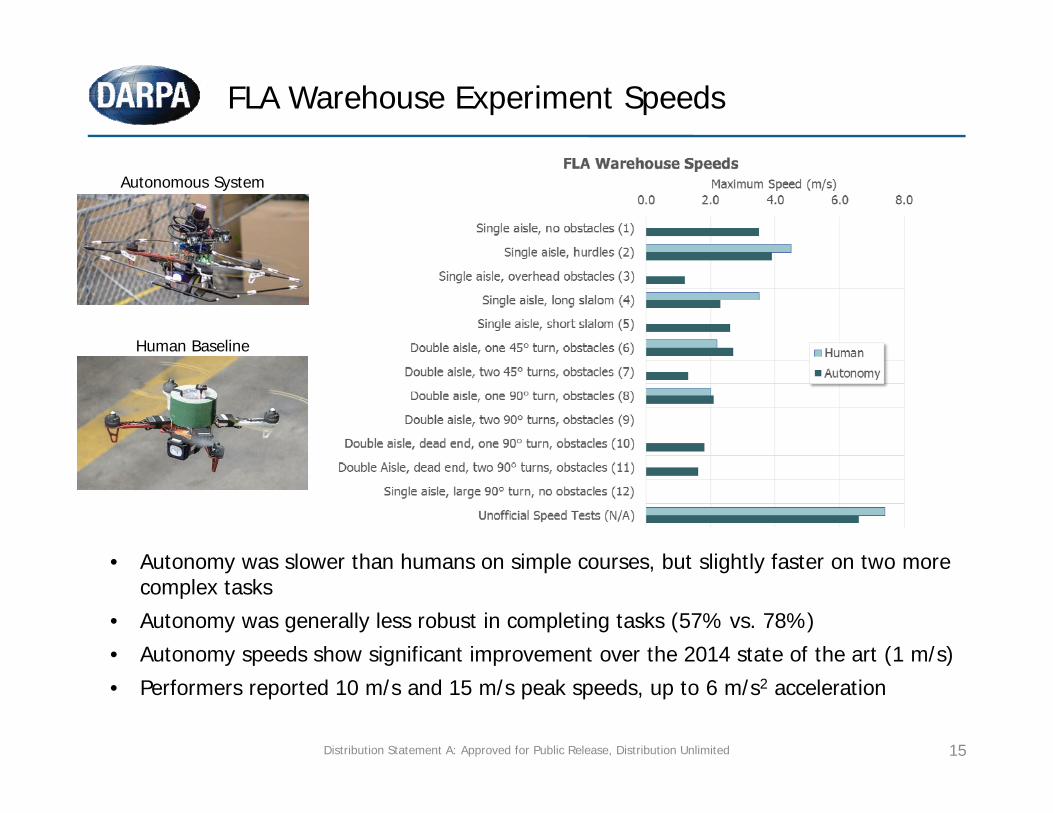
FLA Warehouse Experiment Speeds
• Autonomy was slower than humans on simple courses, but slightly faster on two more complex tasks
• Autonomy was generally less robust in completing tasks (57% vs. 78%)
• Autonomy speeds show significant improvement over the 2014 state of the art (1 m/s)
• Performers reported 10 m/s and 15 m/s peak speeds, up to 6 m/s2 acceleration
Autonomous System
Human Baseline
Distribution Statement A: Approved for Public Release, Distribution Unlimited 16
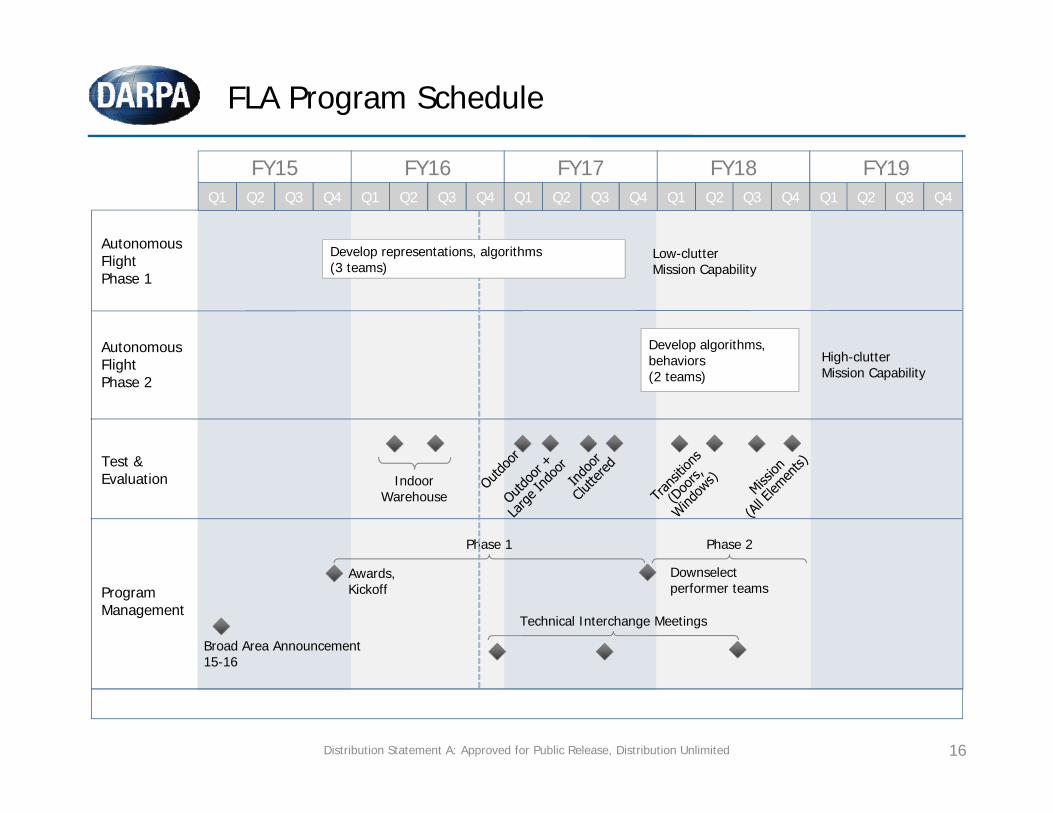
FLA Program Schedule
Broad Area Announcement15-16
AutonomousFlightPhase 2
ProgramManagement
Technical Interchange Meetings
Awards,Kickoff
Downselectperformer teams
Phase 1
Q1 Q2 Q3 Q4
FY15Q1 Q2 Q3 Q4
FY16Q1 Q2 Q3 Q4
FY17Q1 Q2 Q3 Q4
FY18
Phase 2
Q1 Q2 Q3 Q4
FY19
Test &Evaluation
AutonomousFlightPhase 1
Low-clutterMission Capability
Develop algorithms, behaviors (2 teams)
High-clutter Mission Capability
Develop representations, algorithms(3 teams)
IndoorWarehouse
1
C3D – Centralized Control of Commercial Drones
Mr. Jean‐Charles LedéDr. Daniel Patt
Distribution Statement A – Approved for public release, distribution unlimited. 17
Concept OverviewAugust 2016
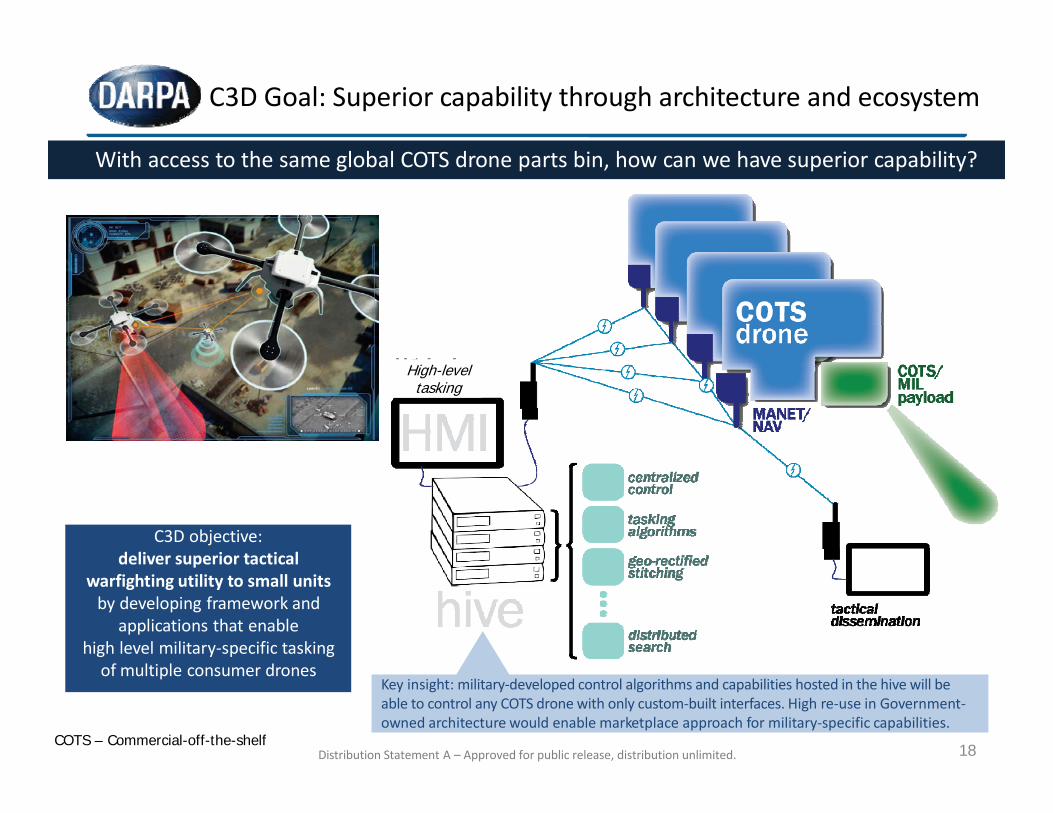
With access to the same global COTS drone parts bin, how can we have superior capability?
C3D objective:deliver superior tactical
warfighting utility to small units by developing framework and
applications that enablehigh level military‐specific tasking of multiple consumer drones
Key insight: military‐developed control algorithms and capabilities hosted in the hive will be able to control any COTS drone with only custom‐built interfaces. High re‐use in Government‐owned architecture would enable marketplace approach for military‐specific capabilities.
18
C3D Goal: Superior capability through architecture and ecosystem
High-level tasking
COTS – Commercial-off-the-shelfDistribution Statement A – Approved for public release, distribution unlimited.

19
Four exemplary vignettes needing multiple air vehicles, central coordination
Locate / Track Distributed Communication Network
Precise Mapping / Targeting / DesignSentry Functions
Distribution Statement A – Approved for public release, distribution unlimited.

www.darpa.mil
20Distribution Statement A: Approved for Public Release, Distribution Unlimited