cmpsci 187 1 computer science 187 introduction to introduction to programming with data structures...
TRANSCRIPT

1
CMPSCI 187CMPSCI 187
Computer Science 187Computer Science 187Computer Science 187Computer Science 187
Introduction to Introduction to Programming with Data Structures
Introduction to Introduction to Programming with Data Structures
Lecture 25Lecture 25Graphs - Part 2Graphs - Part 2
Lecture 25Lecture 25Graphs - Part 2Graphs - Part 2
AnnouncementsAnnouncements
2
CMPSCI 187CMPSCI 187
Directed Graphs: digraphsDirected Graphs: digraphs
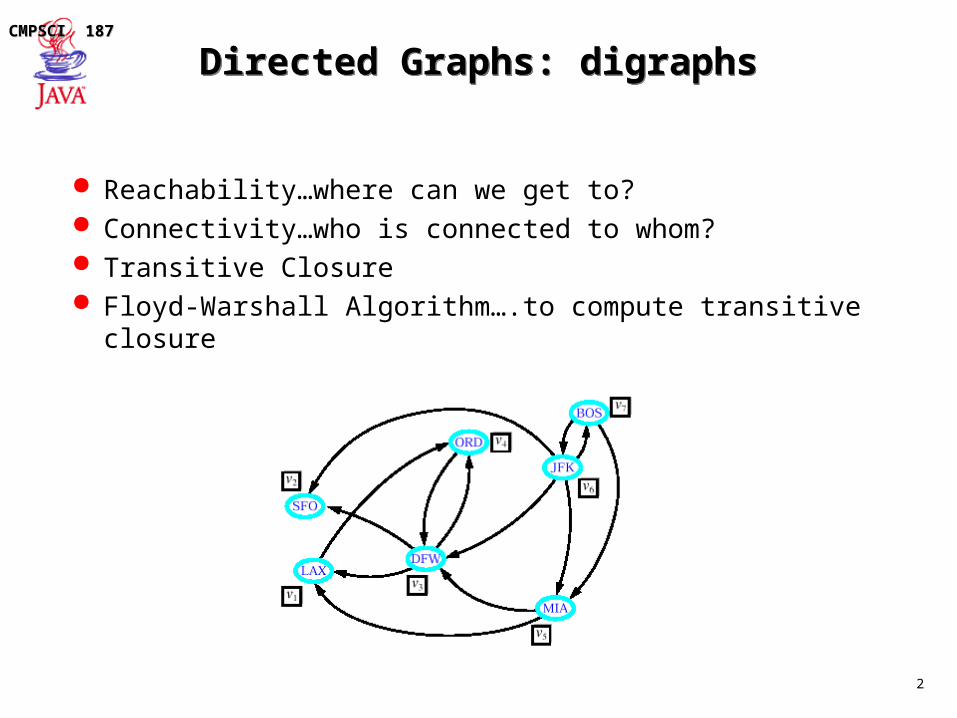
Reachability…where can we get to? Connectivity…who is connected to whom? Transitive Closure Floyd-Warshall Algorithm….to compute transitive closure
3
CMPSCI 187CMPSCI 187
DigraphsDigraphs
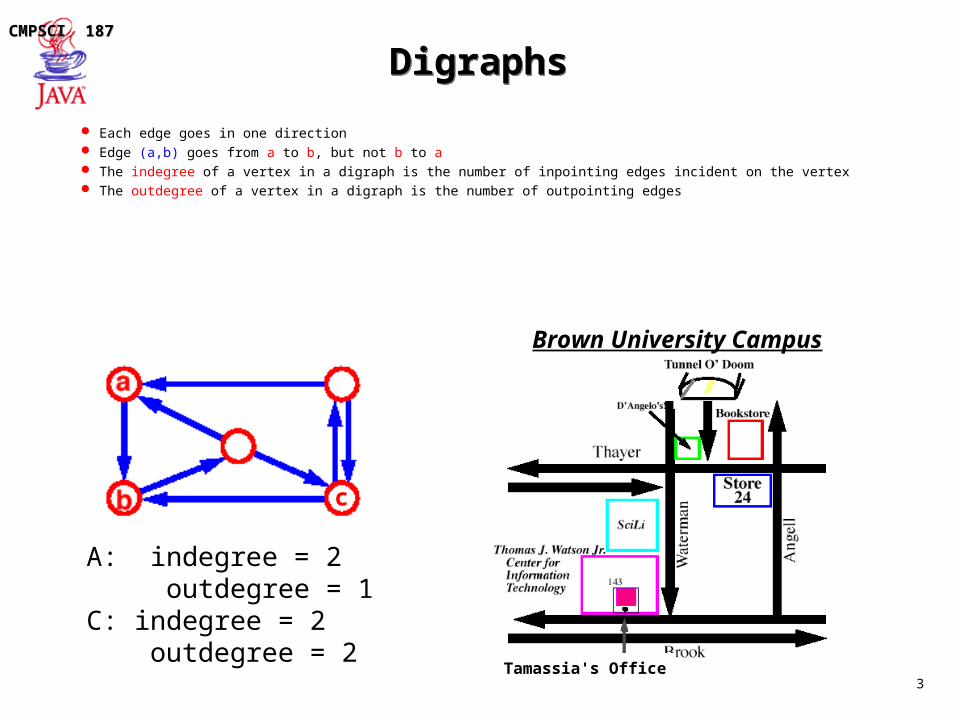
Each edge goes in one direction Edge (a,b) goes from a to b, but not b to a The indegree of a vertex in a digraph is the number of inpointing edges incident on the vertex The outdegree of a vertex in a digraph is the number of outpointing edges
Tamassia's Office
Brown University Campus
A: indegree = 2 outdegree = 1C: indegree = 2 outdegree = 2
c

4
CMPSCI 187CMPSCI 187
Another Application: SchedulingAnother Application: Scheduling
Scheduling: edge (a,b) means task a must be completed before b can be started
5
CMPSCI 187CMPSCI 187
Directed Acyclic Graphs: dagsDirected Acyclic Graphs: dags
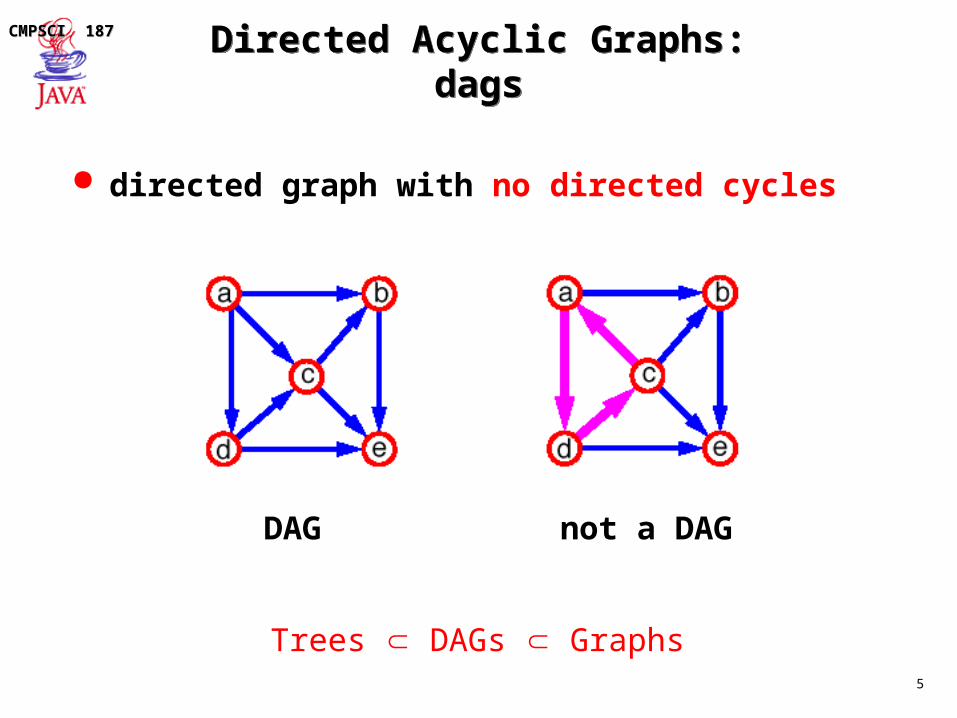
directed graph with no directed cycles
DAG not a DAG
Trees DAGs Graphs

6
CMPSCI 187CMPSCI 187
Simple Paths and CyclesSimple Paths and Cycles
A simple path repeats no vertices (except that the first can be the last): p = {Seattle, Salt Lake City, San Francisco, Dallas} p = {Seattle, Salt Lake City, Dallas, San Francisco, Seattle}
A cycle is a path that starts and ends at the same vertex: p = {Seattle, Salt Lake City, Dallas, San Francisco, Seattle} p = {Chicago, Dallas, Salt Lake, Chicago, Dallas, Chicago
A simple cycle is a cycle that repeats no vertices except that the first vertex is also the last (in undirected graphs, no edge can be repeated) p = {Seattle, Salt Lake City, Dallas, San Francisco, Seattle}
Seattle
San Francisco
ChicagoSalt Lake City
Dallas

7
CMPSCI 187CMPSCI 187
Depth First SearchDepth First Search
Same algorithm as for undirected graphs On a connected digraph, may yield unconnected DFS
trees (i.e., a DFS forest)

8
CMPSCI 187CMPSCI 187
ReachabilityReachability
DFS tree rooted at v: vertices reachable from v via directed paths
Interesting problems dealing with reachability in a digraph G: Given vertices u and v, determine whether u reaches v. Find all vertices of G that are reachable from a given vertex s. Determine whether G is strong connected. Determine whether G is acyclic Compute the transitive closure G* of G.

9
CMPSCI 187CMPSCI 187
Reachability ExamplesReachability Examples
A directed path from BOS to LAX is shown in red.
Bos
JFK
MIADFW
ORD
SFO
LAX
Bos
JFK
MIADFW
ORD
SFO
LAX
A directed cycle (ORD, MIA, DFW, LAX, ORD) is shown in red; its vertices induce a strongly connected subgraph
Bos
JFK
MIADFW
ORD
SFO
LAX
The subgraph of vertices and edges reachable from ORD is shown in red.
Bos
JFK
MIADFW
ORD
SFO
LAX
Removing the dashed red lines results in a directed acyclic graph.

10
CMPSCI 187CMPSCI 187
Strongly Connected DigraphStrongly Connected Digraph
Each vertex can reach all other vertices

11
CMPSCI 187CMPSCI 187
Strongly Connected ComponentsStrongly Connected Components
{ a , c , g }{ f , d , e , b }

12
CMPSCI 187CMPSCI 187
Transitive ClosureTransitive Closure
Digraph G * is obtained from G using the rule: If there is a directed path in G from a to b, then add the
edge (a,b) to G *
G* is called the transitive closure of G.
G G*
Added

13
CMPSCI 187CMPSCI 187
DefinitionsDefinitions
Undirected graphs are connected if there is a path between any two vertices
Directed graphs are strongly connected if there is a path from any one vertex to any other
Di-graphs are weakly connected if there is a path between any two vertices, ignoring direction
A complete graph has an edge between every pair of vertices

14
CMPSCI 187CMPSCI 187
DFS and BFS for DigraphsDFS and BFS for Digraphs
Algorithms are very similar to their undirected counterparts. Algorithms only traverse edges according to their respective directions.
Searches can be used to answer reachability questions DFS on G starting at vertex s visits all the vertices of G that are reachable from s. The DFS tree contains directed paths from s to every vertex reachable from s.
If G is a digraph with n vertices and m edges, then DFS runs in O(n+m). The following problems can be solved by an algorithm that traverse G n times using
DFS; complexities are O(n(n+m)): Computing, for each vertex of G, the subgraph reachable from v Testing whether G is strongly connected Computing the transitive closure G* of G

15
CMPSCI 187CMPSCI 187
Topological SortTopological Sort
Given a graph, G = (V, E), output all the vertices in V such that no vertex is output before any other vertex with an edge to it.
check inairport
calltaxi
taxi toairport
reserveflight
packbags
takeflight
locategate

16
CMPSCI 187CMPSCI 187
Topological Sort: General IdeaTopological Sort: General Idea
Label each vertex’s in-degree (# of inbound edges)
While there are vertices remaining
Pick a vertex with in-degree of zero and output it
Reduce the in-degree of all vertices adjacent to it
Remove it from the list of vertices

17
CMPSCI 187CMPSCI 187
Topological Sort RefinementTopological Sort Refinement
Label each vertex’s in-degree
Initialize a queue to contain all in-degree zero vertices
While there are vertices remaining in the queue
Pick a vertex v with in-degree of zero and output it
Reduce the in-degree of all vertices adjacent to v
Put any of these with new in-degree zero on the queue
Remove v from the queue

18
CMPSCI 187CMPSCI 187
Weighted GraphsWeighted Graphs
Weighted Graphs weights on the edges of a graph represent distances, costs, etc. An example of an undirected weighted graph:
Shortest Paths

19
CMPSCI 187CMPSCI 187
Single Source Shortest PathSingle Source Shortest Path
Given a graph G = (V, E) and a vertex s V, find the shortest path from s to every vertex in V
Many variations: directed vs. undirected weighted vs. unweighted cyclic vs. acyclic positive weights only vs. negative weights allowed multiple weight types to optimize

20
CMPSCI 187CMPSCI 187
The Trouble with Negative Weighted Cycles
The Trouble with Negative Weighted Cycles
A B
C D
E
2 10
1-5
2
What’s the shortest path from A to E?(or to B, C, or D, for that matter)

21
CMPSCI 187CMPSCI 187
Shortest PathShortest Path
BFS finds paths with the minimum number of edges from the start vertex
Hencs, BFS finds shortest paths assuming that each edge has the same weight
In many applications, e.g., transportation networks, the edges of a graph have different weights.
How can we find paths of minimum total weight? Example - Boston to Los Angeles:

22
CMPSCI 187CMPSCI 187
Dijkstra's AlgorithmDijkstra's Algorithm
Dijkstra’s algorithm finds shortest paths from a start vertex v to all the other vertices in a graph with
undirected edges (works for directed edges w/minor mods)
nonnegative edge weights
The algorithm computes for each vertex u the distance of u from the start vertex v, that is, the weight of a shortest path between v and u.
The algorithm keeps track of the set of vertices for which the distance has been computed, called the cloud C

23
CMPSCI 187CMPSCI 187
Dijkstra's Algorithm, cont.Dijkstra's Algorithm, cont.
Every vertex has a label D associated with it. For any vertex u, we can refer to its D label as D[u].
D[u] stores an approximation of the distance between v and u. The algorithm will update a D[u] value when it finds a shorter path from v to u.
When a vertex u is added to the cloud, its label D[u] is equal to the actual (final) distance between the starting vertex v and vertex u.
Initially, we set - D[v] = 0 ...the distance from v to itself is 0... - D[u] = for u v ...these will change...

24
CMPSCI 187CMPSCI 187
Expanding the CloudExpanding the Cloud
Repeat until all vertices have been put in the cloud: let u be a vertex not in the cloud that has smallest label D[u]. (On
the first iteration, naturally the starting vertex will be chosen.) we add u to the cloud C we update the labels of the adjacent vertices of u as follows
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
The above step is called a relaxation of edge (u,z)
v was put in the cloud first. Then this u. Then this u.
85
90

25
CMPSCI 187CMPSCI 187
PseudoCodePseudoCode
We use a priority queue Q to store the vertices not in the cloud, where D[v] is the key of a vertex v in Q
Algorithm ShortestPath(G, v):Input: A weighted graph G and a distinguished vertex v of G.Output: A label D[u], for each vertex u of G, such that D[u] is the length of a shortest path from v to u in G.
initialize D[v] 0 and D[u] + for each vertex v ulet Q be a priority queue that contains all of the vertices of G using the D labels as keys.while Q do {pull u into the cloud C} u Q.removeMinElement() for each vertex z adjacent to u such that z is in Q do {perform the relaxation operation on edge (u, z) } if D[u] + w((u, z)) < D[z] then D[z] D[u] + w((u, z)) change the key value of z in Q to D[z]return the label D[u] of each vertex u.

26
CMPSCI 187CMPSCI 187
ExampleExample
BOS BWI 0DFW JFK BWI184LAX MIA BWI 946ORD BWI 621PVD SFO
Parent Distance
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
Pull JFK into the cloud and continue

27
CMPSCI 187CMPSCI 187
JFK is the nearestJFK is the nearest
BOS JFK 371BWI 0DFW JFK 1575JFK BWI184LAX MIA BWI 946ORD BWI 621PVD JFK 328SFO
Parent Distance
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
u
Was Was 621
Was
Was 946Pull PVD into the cloud and continue

28
CMPSCI 187CMPSCI 187
Followed by PVDFollowed by PVD
BOS JFK 371BWI 0DFW JFK 1575 JFK BWI184LAX MIA BWI 946ORD BWI 621PVD JFK 328SFO
Parent Distance
u
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
Pull BOS into the cloud and continue

29
CMPSCI 187CMPSCI 187
Boston is just a bit furtherBoston is just a bit further
BOS JFK 371BWI 0DFW JFK 1575JFK BWI184LAX MIA BWI 946ORD BWI 621PVD JFK 328SFO BOS 3075
Parent Distance
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
Was
u
Pull ORD into the cloud and continue

30
CMPSCI 187CMPSCI 187
Chicago is nextChicago is next
BOS JFK 371BWI 0DFW ORD 1423JFK BWI184LAX MIA BWI 946ORD BWI 621PVD JFK 328SFO ORD 2467
Parent Distance
Both were adjusted this turn
u
Was 1575
Was 3075
Pull MIA into the cloud and continue
31
CMPSCI 187CMPSCI 187
Now MiamiNow Miami
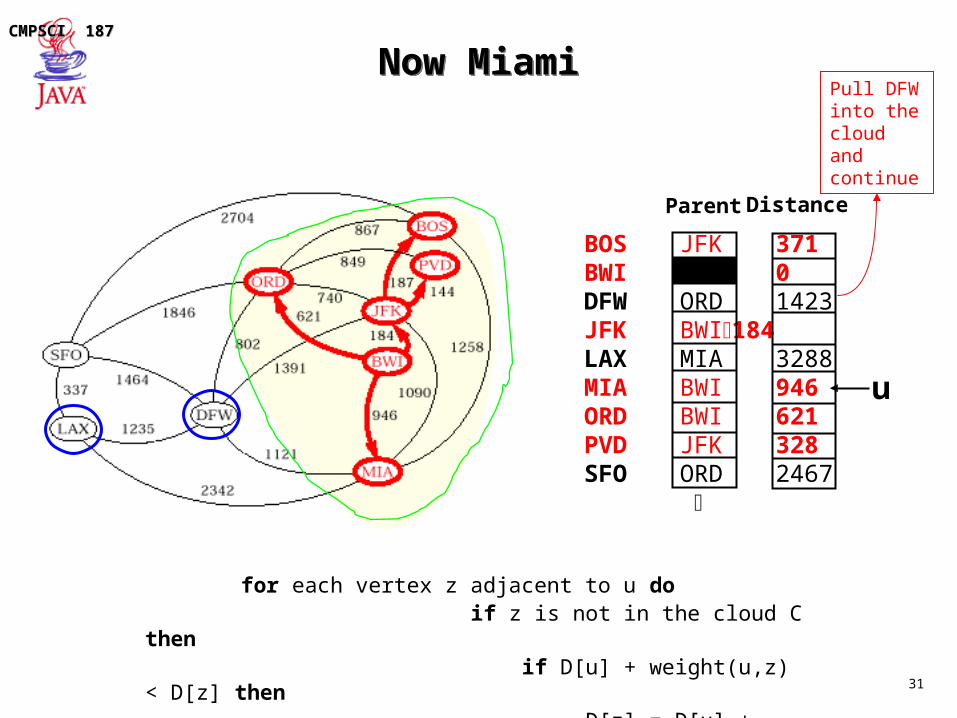
BOS JFK 371BWI 0DFW ORD 1423JFK BWI184LAX MIA 3288 MIA BWI 946ORD BWI 621PVD JFK 328SFO ORD 2467
Parent Distance
u
for each vertex z adjacent to u do if z is not in the cloud C then if D[u] + weight(u,z) < D[z] then D[z] = D[u] + weight(u,z)
Pull DFW into the cloud and continue

32
CMPSCI 187CMPSCI 187
Now Dallas-Fort WorthNow Dallas-Fort Worth
BOS JFK 371BWI 0DFW ORD 1423JFK BWI184LAX DFW 2658 MIA BWI 946ORD BWI 621PVD JFK 328SFO ORD 2467
Parent Distance
LAX was adjusted this turn
Pull SFO into the cloud and continue
u

33
CMPSCI 187CMPSCI 187
Now San FranciscoNow San Francisco
BOS JFK 371BWI 0DFW ORD 1423JFK BWI184LAX DFW 2658 MIA BWI 946ORD BWI 621PVD JFK 328SFO ORD 2467
Parent Distance

34
CMPSCI 187CMPSCI 187
Finally, LAFinally, LA
BOS JFK 371BWI 0DFW ORD 1423JFK BWI184LAX DFW 2658 MIA BWI 946ORD BWI 621PVD JFK 328SFO ORD 2467
Parent Distance

35
CMPSCI 187CMPSCI 187
Running TimeRunning Time
Let’s assume that we represent G with an adjacency list. We can then step through all the vertices adjacent to u in time proportional to their number (i.e. O(deg u) where deg u in the number of vertices adjacent to u)
The priority queue Q - we have a choice: A Heap: Implementing Q with a heap allows for efficient extraction of vertices
with the smallest D label(O(logN)). Key updates can also be performed in O(logN) time. The total run time is O((n+m)logn) where n is the number of vertices in G and m in the number of edges. In terms of n, worst case time is O(n 2 logn)
An Unsorted Sequence: O(n) when we extract minimum elements, but fast key updates (O(1)). There are only n-1 extractions and m relaxations. The running time is O(n2 +m)
In terms of worst case time, heap is good for small data sets and sequence for larger.
36
CMPSCI 187CMPSCI 187
Running Time, cont.Running Time, cont.
The average case is a slightly different story. Consider this: If priority queue Q is implemented with a heap, the bottleneck step
is updating the key of a vertex in Q. In the worst case, we would need to perform an update for every edge in the graph.
For most graphs, though, this would not happen. Using the random neighbor-order assumption, we can observe that for each vertex, its neighbor vertices will be pulled into the cloud in essentially random order. So here are only O(logn) updates to the key of a vertex.
Under this assumption, the run time of the heap implementation is O(nlogn+m), which is always O(n 2 ). The heap implementation is thus preferable for all but degenerate cases.

37
CMPSCI 187CMPSCI 187
ObservationsObservations
In our example, the weight is the geographical distance. However, the weight could just as easily represent the cost or time to fly the given route.
We can easily modify Dijkstra’s algorithm for different needs, for instance: If we just want to know the shortest path from vertex v to a single
vertex u, we can stop the algorithm as soon as u is pulled into the cloud.
Or, we could have the algorithm output a tree T rooted at v such that the path in T from v to a vertex u is a shortest path from v to u.

38
CMPSCI 187CMPSCI 187
Weighted GraphsWeighted Graphs
weight(G') = 800 + 400 + 1200
= 2400
(weight of subgraph G') = (sum of weights of edges of G')
weight(G') = weight(e)
(e G')

39
CMPSCI 187CMPSCI 187
Minimum Spanning TreeMinimum Spanning Tree
spanning tree of minimum total weight e.g., connect all the computers in a building with the least amount
of cable Examples:
Minimum spanning trees are not generally unique

40
CMPSCI 187CMPSCI 187
Applications of MSTsApplications of MSTs
Communication networks
VLSI design
Transportation systems
Good approximation to some NP-hard problems (take CS250)

41
CMPSCI 187CMPSCI 187
Minimum Spanning Tree PropertyMinimum Spanning Tree Property
Let (V',V") be a partition of the vertices of G Let e = (v', v"), be an edge of minimum weight across
the partition,
i.e., v' V' and v" V". There is a MST containing edge e.

42
CMPSCI 187CMPSCI 187
Proof of PropertyProof of Property
If the MST does not contain a minimum weight edge e, then we can find a better or equal MST by exchanging e for some other edge.

43
CMPSCI 187CMPSCI 187
Prim-Jarnik Algorithm for the MSTPrim-Jarnik Algorithm for the MST
grows the MST T one vertex at a time cloud covering the portion of T already computed labels D[u] and E[u] associated with each vertex u
E[u] is the best (lowest weight) edge connecting u to T D[u] (distance to the cloud) is the weight of E[u]

44
CMPSCI 187CMPSCI 187
Differences between Prim’s and Dijkstra’sDifferences between Prim’s and Dijkstra’s
For any vertex u, D[u] represents the weight of the current best edge for joining u to the rest of the tree (as opposed to the total sum of edge weights on a path from start vertex to u).
Use a priority queue Q whose keys are D labels, and whose elements are vertex-edge pairs.
Any vertex v can be the starting vertex. We still initialize all the D[u] values to INFINITE, but we
also initialize E[u] (the edge associated with u) to null. Return the minimum-spanning tree T.
We can reuse code from Dijkstra’s algorithm, and we only have to change a few things. Let’s look at the pseudocode....

45
CMPSCI 187CMPSCI 187
Prim-Jarnik Pseudo CodePrim-Jarnik Pseudo Code
Algorithm PrimJarnik(G): Input: A weighted graph G. Output: A minimum spanning tree T for G.pick any vertex v of G {grow the tree starting with vertex v}T {v} D[u] 0 E[u] for each vertex u v do D[u] let Q be a priority queue that contains vertices, using the D labels as keyswhile Q do {pull u into the cloud C} uQ.removeMinElement() add vertex u and edge E[u] to T for each vertex z adjacent to u do if z is in Q {perform the relaxation operation on edge (u, z) } if weight(u, z) < D[z] then D[z] weight(u, z) E[z] (u, z) change the key of z in Q to D[z]return tree T

46
CMPSCI 187CMPSCI 187
ExampleExample
DFW STL 400LAX STL 1800LGA STL 1200MIAMSN STL 800PVDSEASFOSTL
Neighbor D[u]
Start at v = STL

47
CMPSCI 187CMPSCI 187
Closest is DFWClosest is DFW
DFW STL 400LAX DFW 1500LGA STL 1200MIA DFW 1000MSN STL 800PVDSEASFOSTL
Neighbor D[u]
D[u] updated when DFW added to cloud

48
CMPSCI 187CMPSCI 187
Now Minneapolis-St. PaulNow Minneapolis-St. Paul
DFW STL 400LAX DFW 1500LGA MSN 1000MIA DFW 1000MSN STL 800PVDSEA MSN 1500SFOSTL
Neighbor D[u]

49
CMPSCI 187CMPSCI 187
Now LaGuardiaNow LaGuardia
DFW STL 400LAX DFW 1500LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFOSTL
Neighbor D[u]

50
CMPSCI 187CMPSCI 187
Now ProvidenceNow Providence
DFW STL 400LAX DFW 1500LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFOSTL
Neighbor D[u]
PVD
200

51
CMPSCI 187CMPSCI 187
Now MiamiNow Miami
PVD
200
DFW STL 400LAX DFW 1500LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFOSTL
Neighbor D[u]
MIA
1500
1000

52
CMPSCI 187CMPSCI 187
Now SeattleNow Seattle
PVD
200
MIA
1500
DFW STL 400LAX DFW 1500LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFO SEA 800STL
Neighbor D[u]
800
1500SEA
SFO
1000

53
CMPSCI 187CMPSCI 187
Now SanFranciscoNow SanFrancisco
PVD
200
MIA
1500
800
1500SEA
SFO
DFW STL 400LAX SFO 400LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFO SEA 800STL
Neighbor D[u]
400
1500
1000

54
CMPSCI 187CMPSCI 187
Finally, Los AngelesFinally, Los Angeles
PVD
200
MIA
1500
800
1500SEA
SFO
400
1500
DFW STL 400LAX SFO 400LGA MSN 1000MIA DFW 1000MSN STL 800PVD LGA 200SEA MSN 1500SFO SEA 800STL
Neighbor D[u]
LAX
1000

55
CMPSCI 187CMPSCI 187
Final Minimal Spanning TreeFinal Minimal Spanning Tree
STL
DFWMSN
SEALGAMIA
PVD SFO
LAX
800 400
800
400
15001000
200
1000

56
CMPSCI 187CMPSCI 187
Running TimeRunning Time
Complexity O((n+m) log n)where n = num vertices, m=num edges, and Q is implemented with a heap.

57
CMPSCI 187CMPSCI 187
Searching HUGE GraphsSearching HUGE Graphs
Consider some really huge graphs…All cities and towns in the World AtlasAll stars in the GalaxyAll ways 10 blocks can be stacked
Huh???

58
CMPSCI 187CMPSCI 187
Implicitly Generated GraphsImplicitly Generated Graphs
A huge graph may be implicitly specified by rules for generating it on-the-fly
Blocks world: vertex = relative positions of all blocks edge = robot arm could stack one block
stack(blue,red)
stack(green,red)
stack(green,blue)

59
CMPSCI 187CMPSCI 187
Robotics Blocks WorldRobotics Blocks World
Source = initial state of the blocks Goal = desired state of the blocks Path from source to goal = sequence of actions
(program) for robot arm!
n blocks nn states 10 blocks 10 billion states
stack(blue,red)
stack(green,blue)
Uh-Oh!

60
CMPSCI 187CMPSCI 187 Problem: Branching Factor or Out-degree of each vertex
Problem: Branching Factor or Out-degree of each vertex
Cannot search such huge graphs exhaustively. Suppose we know that goal is only d steps away.
Dijkstra’s algorithm is basically breadth-first search (taking into account the edge weights)
If the out-degree of each node is 10, potentially visits 10d vertices 10 step plan = 10 billion vertices!

61
CMPSCI 187CMPSCI 187
A Simpler ExampleA Simpler Example
Suppose you live in Manhattan; what do you do?
52nd St
51st St
50th St
10th A
ve
9th A
ve
8th A
ve
7th A
ve
6th A
ve
5th A
ve
4th A
ve
3rd A
ve
2nd A
ve
S
G

62
CMPSCI 187CMPSCI 187
Best-First SearchBest-First Search
The manhattan distance ( x+ y) is an estimate of the distance to the goal a heuristic value
Best-First Search Order nodes in priority to minimize estimated distance to the goal
Compare: Dijkstra Order nodes in priority to minimize distance from the start
52nd St
51st St
50th St 10th A
ve
9th A
ve
8th A
ve
7th A
ve
6th A
ve
5th A
ve
4th A
ve
3rd A
ve
2nd A
ve
SG
x
y
x= 6 y = 1Distance ~ 7
Best-First Action
63
CMPSCI 187CMPSCI 187
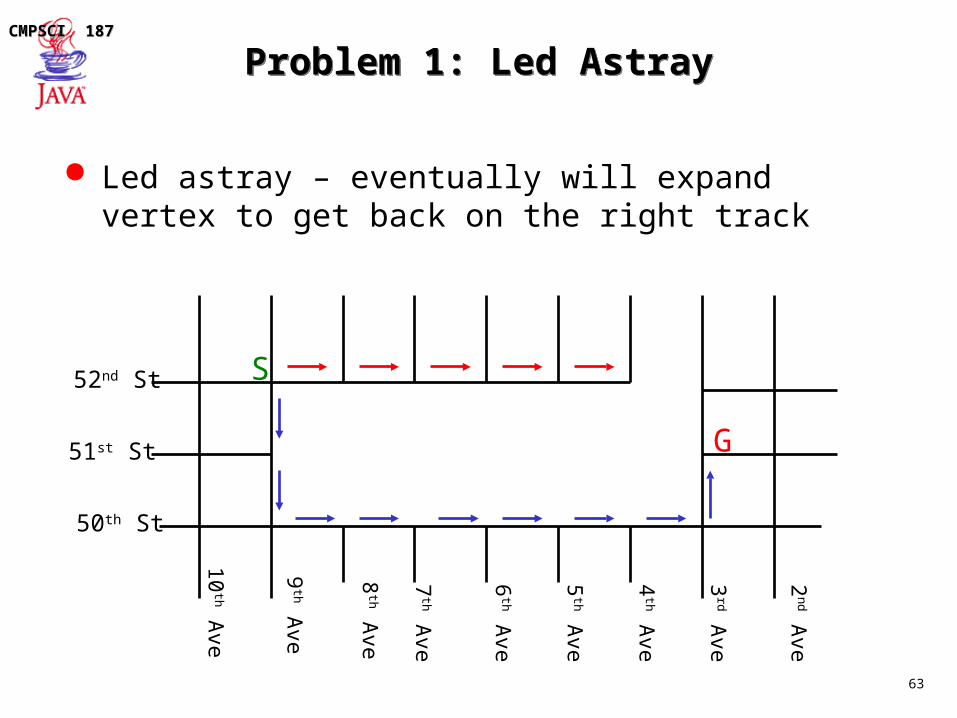
Problem 1: Led AstrayProblem 1: Led Astray
Led astray – eventually will expand vertex to get back on the right track
52nd St
51st St
50th St
10th A
ve
9th A
ve
8th A
ve
7th A
ve
6th A
ve
5th A
ve
4th A
ve
3rd A
ve
2nd A
ve
S
G

64
CMPSCI 187CMPSCI 187
Problem 2: OptimalityProblem 2: Optimality
With Best-First Search, are you guaranteed a shortest path is found when goal is first seen? when goal is removed from priority queue?
No! Goal is by definition at distance 0: will be removed from priority queue immediately when it is seen, even if a shorter path exists!
52nd St
51st St
9th A
ve
8th A
ve
7th A
ve
6th A
ve
5th A
ve
4th A
ve
S
G
(5 blocks)Best-First Search typically results in a sub-optimal solution!

65
CMPSCI 187CMPSCI 187
Dijkstra vs. Best-FirstDijkstra vs. Best-First
Dijkstra / Breadth First guaranteed to find optimal solution
Best First often visits far fewer vertices, but may not provide optimal solution
Can we get the best of both?

66
CMPSCI 187CMPSCI 187
The A* AlgorithmThe A* Algorithm
Order vertices in priority queue to minimize (distance from start) + (estimated distance to goal)
f(n) = g(n) + h(n) Where:
f(n) = priority of a node
g(n) = true distance from start
h(n) = heuristic distance to goal
Suppose the estimated distance (h) is the true distance to the goal (heuristic is a lower bound)
Then: when the goal is removed from the priority queue, we are guaranteed to have found a shortest path!

67
CMPSCI 187CMPSCI 187
Problem 2 RevisitedProblem 2 Revisited
52nd St
51st St
9th A
ve
8th A
ve
7th A
ve
6th A
ve
5th A
ve
4th A
veS
G
(5 blocks)
Priority = 1+4=5
Dijkstra would have
visited these guys!
50th St
Priority = 5+2=6

68
CMPSCI 187CMPSCI 187
A Little HistoryA Little History
A* invented by Nils Nilsson & colleagues in 1968 or maybe some guy in Operations Research?
Cornerstone of artificial intelligence still a hot (OK - lukewarm) research topic! iterative deepening A*, automatically generating heuristic functions,
… Method of choice for search large (even infinite) graphs
when a good heuristic function can be found Proofs of optimality exist

69
CMPSCI 187CMPSCI 187
Remember the Blocks?Remember the Blocks?
“Distance to goal” is not always physical distance Blocks world:
distance = number of stacks to perform heuristic lower bound = number of blocks out of place
# out of place = 2, true distance to goal = 3
1 2 3

70
CMPSCI 187CMPSCI 187
Other ExamplesOther Examples
Simplifying Integrals vertex = formula goal = closed form formula without integrals arcs = mathematical transformations heuristic = number of integrals remaining in formula
Problem: given chopped up DNA, reassemble Vertex = set of pieces Arc = stick two pieces together Goal = only one piece left Heuristic = number of pieces remaining - 1
Lots More!
71
CMPSCI 187CMPSCI 187
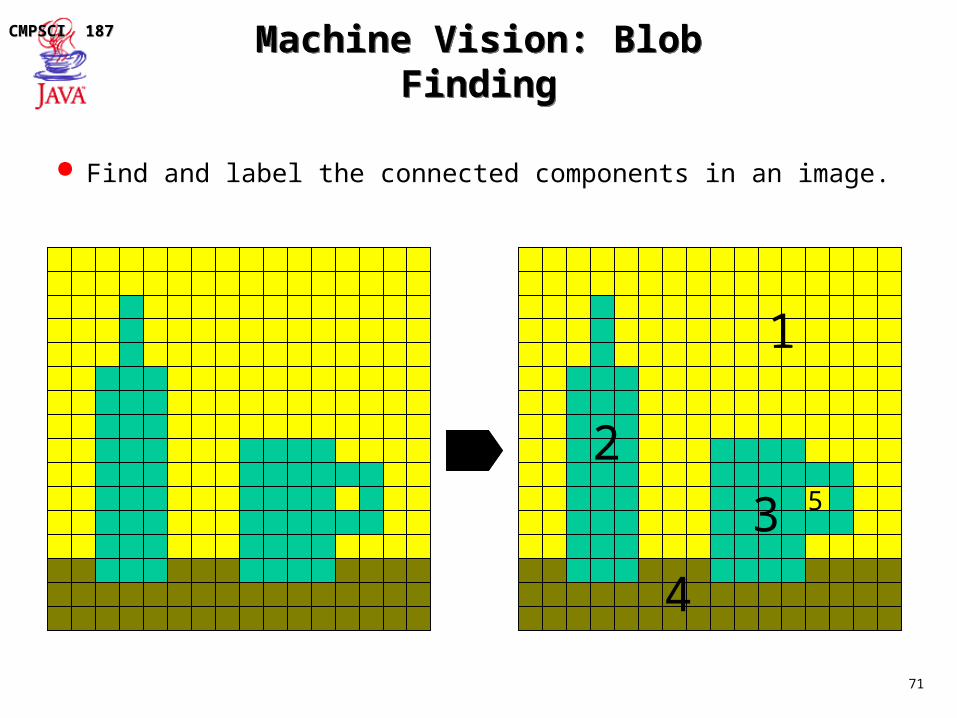
Machine Vision: Blob FindingMachine Vision: Blob Finding
Find and label the connected components in an image.
1
2
3
4
5
72
CMPSCI 187CMPSCI 187
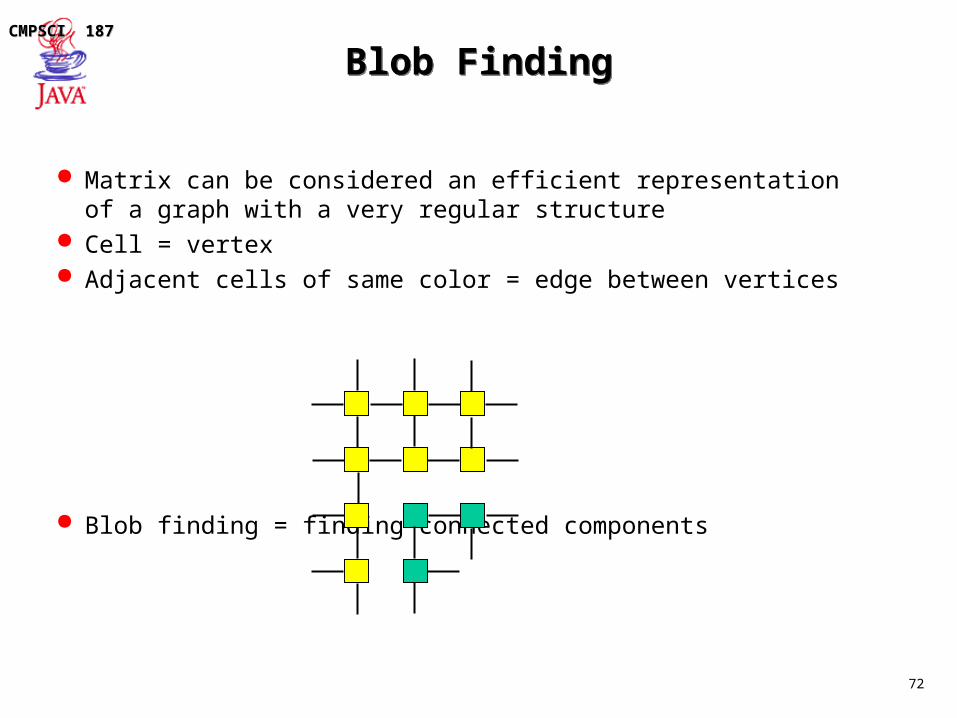
Blob FindingBlob Finding
Matrix can be considered an efficient representation of a graph with a very regular structure
Cell = vertex Adjacent cells of same color = edge between vertices
Blob finding = finding connected components
73
CMPSCI 187CMPSCI 187
TradeoffsTradeoffs
DFS approache is (essentially) O(E+V) = O(V) for binary images Why?
For each component, DFS (“recursive labeling”) can move all over the image – entire image must be in main memory
Better in practice: row-by-row processing localizes accesses to memory
Algorithm: Scan through image left/right and top/bottom If a cell is same color as (connected to) cell to right or below, then
union them into an equivalence class {SET THEORETIC APPROACH} Give the same blob number to cells in each equivalence class

74
CMPSCI 187CMPSCI 187
Blob Labeling AlgorithmBlob Labeling Algorithm
Put each cell <x,y> in its own equivalence classFor each cell <x,y>
if color[x,y] == color[x+1,y] thenUnion( <x,y>, <x+1,y> )
if color[x,y] == color[x,y+1] thenUnion( <x,y>, <x,y+1> )
label = 0For each root <x,y>
blobnum[x,y] = ++ label;For each cell <x,y>
blobnum[x,y] = blobnum( Find(<x,y>) )

75
CMPSCI 187CMPSCI 187