c.m. rodrigue, 2015 geography, csulb mars: sources of data from the robotic missions ii geography...
TRANSCRIPT

C.M. Rodrigue, 2015Geography, CSULB
Mars: Sources of Data from the Robotic Missions II
Geography 441/541S/15
Dr. Christine M. Rodrigue

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking orbiter instrumentation
Visual Imaging Subsystem (VIR): Source of images I showed you earlier
Stereo telescopic TV cameras with 6 filters to create images in one of 5 visible light bandwidth ranges or the entire VL range
Used in geologic mapping, atmospheric studies, identifying safe and interesting landing sites, and to correlate with lander data

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking orbiter instrumentation
• Infrared Thermal Mapper (IRTM) multichannel radiometer– 4 telescopes, each with 7 IR detectors, aimed parallel to VIS– Measured temperatures in the atmosphere and on the surface
• Orbiter Radio Science– S-band and X-band radio (Doppler and time-of-flight) used for
orbital position readings, Mars gravitational field studies, interplanetary plasma studies, solar corona studies
– UHF (381 MHz) lander-to-orbiter communications, exploited also for occultation studies of the vertical pressure and temperature structure of the Martian atmosphere
• Mars Atmospheric Water Detector (MAWD)– Infrared grating spectrometer measuring reflected sunlight in
the wavelengths that water is known to absorb– Looking for that absorption yields micrometers of precipitable
water vapor

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking lander
Lander locations chosen “on the fly” on the basis of images from the orbiters
Lander 1 sent to 22.54°N, 48.23°W: Chryse Planitia Lander 2 sent to 44°N, 226°W: Utopia Planitia

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking lander instrumentation: fully loaded!
Imaging: 2 scanner cameras, mounted 1.3 m above ground and 0.8 m apart to generate stereoscopic vision
S-band radio transmitter for Doppler and range effects and navigation
Entry science (atmospheric probe functions on the way down to Mars’ surface): accelerometers, radar altimeters, thermometers, pressure sensors to get at vertical pressure and thermal structure of the atmosphere, as well as its mean mass and density
Weather station mounted on a boom above the landers (3 anemometers for wind speed, 3 thermocouple thermometers for daily temperature records, and a metal diaphragm for air pressure readings)

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Viking 1976-1982
Viking lander instrumentation: fully loaded! Seismometers (3 on each lander, meant to function as
a basic seismic array, but the package on Lander 1 failed)
Magnetic properties instruments (2 magnets on lander backhoe and 1 on top of the lander to capture dust with magnetic properties for imaging with lander cameras through a 4 power magnifying mirror)
Physical properties experiment (mostly using information collected by other instruments incidental to their main uses but processed to give data on soil bulk density, bearing strength, angle of repose, cohesion, internal friction angles, and many other traits)
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking lander instrumentation: fully loaded!
Neutral mass spectrometer in entry science probe package ionizes materials/chemicals for analysis of their mass and identification
Gas chromatograph/mass spectrometer used to identify materials in Mars surface soils as collected by landers
X-ray fluorescence spectrometer measures X-rays emitted by materials subjected to X-rays from instrument’s radioisotope sources. Soil materials collected by landers’ surface sampler and delivered to the XRFS in the lander body. Spectral analysis of materials ranged as fine as a few parts per million!
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Viking 1976-1982 Viking lander instrumentation: fully loaded!
Biology experiments were probably the most critical contribution of the landers’ design: incubated Martian soil samples in a variety of environmental conditions, including some control samples sterilized by heat for comparison
Pyrolytic release sought to detect the uptake of carbon dioxide in a photosynthetic or chemosynthetic process, using radioactive C14
Labeled release added radioactive nutrients to the samples and then monitored the air above the samples for signs of the respiration of those radioactive species
Gas exchange involved the purging of the Martian atmosphere from the soil samples, substitution of a custom incubation atmosphere, introduction of a nutrient medium enriched in neon, and then samples of the air in the chamber were taken for gas chromatography
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
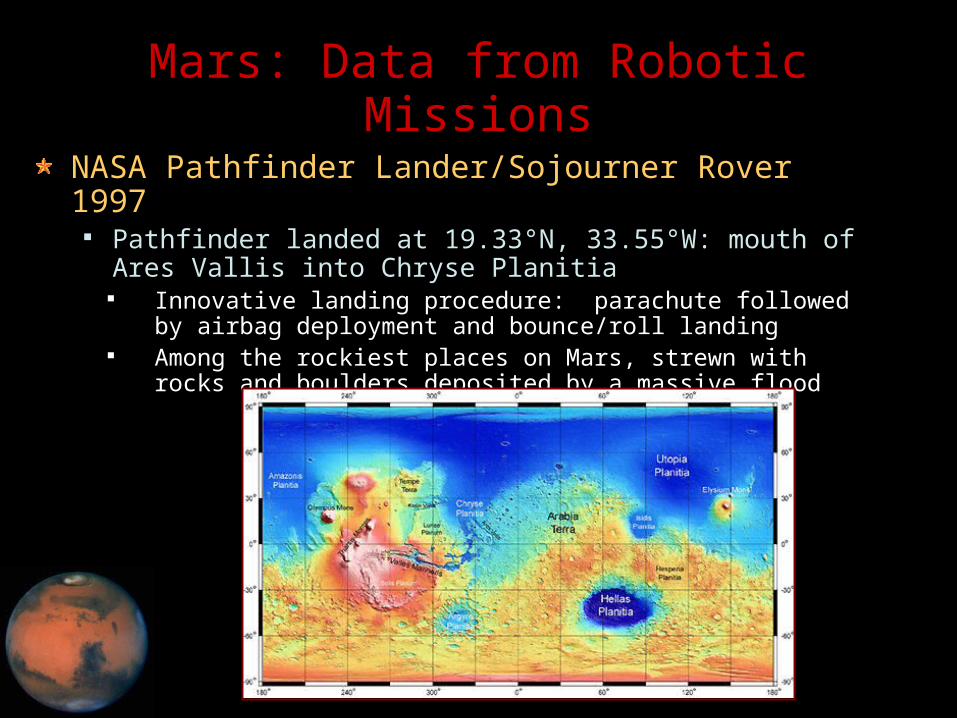
NASA Pathfinder Lander/Sojourner Rover 1997 Pathfinder landed at 19.33°N, 33.55°W: mouth of Ares Vallis into
Chryse Planitia Innovative landing procedure: parachute followed by airbag
deployment and bounce/roll landing Among the rockiest places on Mars, strewn with rocks and boulders
deposited by a massive flood

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Pathfinder Lander/Sojourner Rover 1997
Pathfinder and Sojourner instrumentation Atmospheric Structure Instrument/Meterology Package (ASI/MET):
– Temperature (thermocouple for measuring temperature during descent and 3 for continuous post-landing measurement)
– Pressure (diaphragm sensor)– Wind sensors (6 hot wire elements around the top of the lander
mast and three aluminum cone wind socks) Alpha Proton X-Ray Spectrometer (APXS):
– On the Sojourner Rover body, with its sensor head on a deployment mechanism carried by the rover
– Emission of alpha particles at a target creates a scatter of alpha particles and protons from the atomic nuclei of chemicals
– Alpha particles excite atoms and they then emit X-rays, which have emission patterns unique to each element
Imager For Mars Pathfinder IMP:– A stereo imaging system allowing parallax and depth information– Selectable filters allowing multipspectral color detection

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Global Surveyor 1997-2006
Orbiter instrumentation Mars Orbiter Camera (MOC) Mars Orbiter Laser Altimeter (MOLA) Thermal Emission Spectrometer (TES) Electron Reflectometer (MAGNETOMETER) Gravity Field Experiment (RADIOSCIENCE):

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Global Surveyor 1997-2006
Orbiter instrumentation Mars Orbiter Camera (MOC):
– 3 cameras: 1 b/w narrow angle, 1 blue &1 red wide angle for context– Designed to resolve objects as small as 4-5 m– In 2003, MGS reprogrammed to time roll of the rotating S/C to keep
MOC view fixed on a target longer, resulting in detection of objects as small as 1.4 m (pixel reduced to 0.5 m)
– Paired before/after images of an active gully! Mars not so dead/dry?
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Global Surveyor 1997-2006
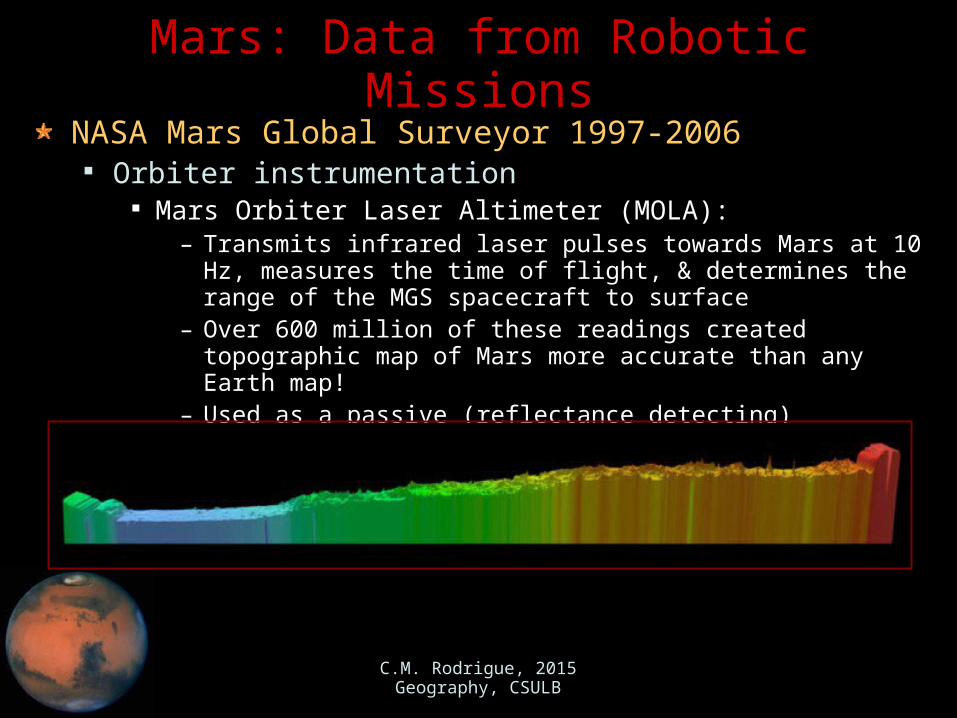
Orbiter instrumentation Mars Orbiter Laser Altimeter (MOLA):
– Transmits infrared laser pulses towards Mars at 10 Hz, measures the time of flight, & determines the range of the MGS spacecraft to surface
– Over 600 million of these readings created topographic map of Mars more accurate than any Earth map!
– Used as a passive (reflectance detecting) radiometer at 1064 nm

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Global Surveyor 1997-2006 Orbiter instrumentation
• Mars Orbiter Laser Altimeter (MOLA)
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
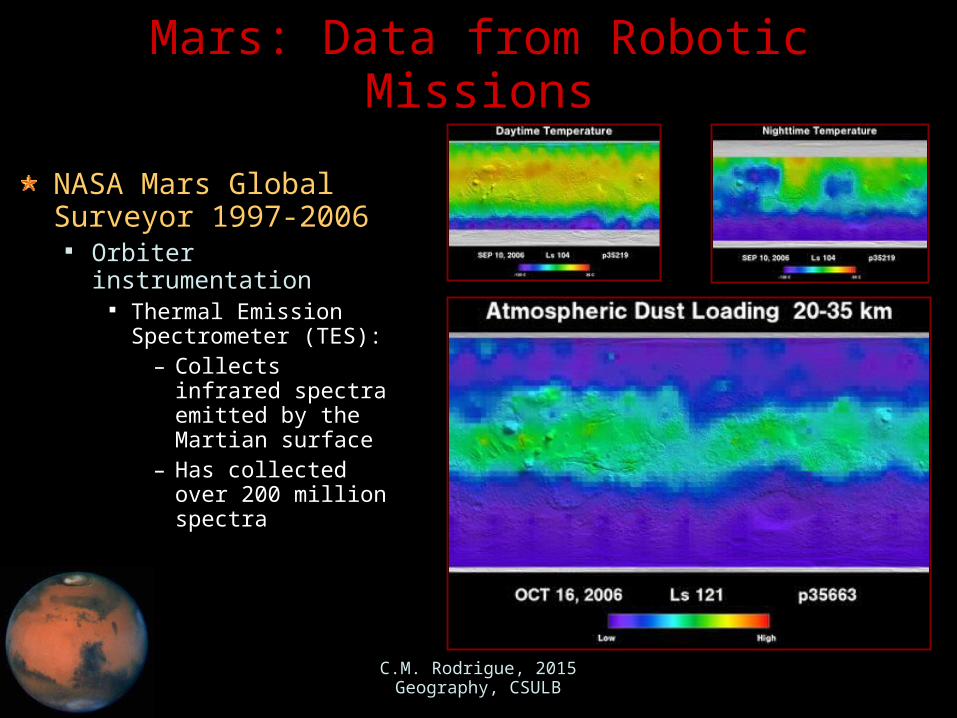
NASA Mars Global Surveyor 1997-2006
Orbiter instrumentation Thermal Emission
Spectrometer (TES): – Collects infrared
spectra emitted by the Martian surface
– Has collected over 200 million spectra

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Global Surveyor 1997-2006 Orbiter instrumentation
Electron Reflectometer (MAGNETOMETER): – Measures magnetism on Mars – Planetary magnetic field collapsed long ago, but there are
localized magnetic sources

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Global Surveyor 1997-2006 Orbiter instrumentation
Gravity Field Experiment (RADIOSCIENCE): – Maps anomalies in the planet's gravitational field – Measures minute tugging effects registered by the
spacecraft's high-gain antenna, its telecommunication system, and the onboard ultra-stable oscillator
– These imply concentrations of dense mass in certain areas and, thus, give some information on the planet’s internal structure
– Also does occultation readings to get data on the atmosphere’s thickness and pressure

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Odyssey 2001 - present
Orbiter instrumentation Thermal Emission Imaging System (THEMIS) Gamma Ray Spectrometer (GRS) Martian Radiation Environment Experiment (MARIE)

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Odyssey 2001 - present
Orbiter instrumentation Thermal Emission Imaging System (THEMIS):
– 2 independent multispectral scanning systems– 5 visible light bands (with 19 m pixels) – 10 infrared bands (with 100 m pixels)– THEMIS focusses on identifying water and ice

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic MissionsNASA Mars Odyssey 2001 - present
Orbiter instrumentation Gamma Ray Spectrometer (GRS) sensor package mounted on a 6
m boom– Detects gamma rays emitted by the Martian surface due to
exposure to highly energetic cosmic rays– Gamma ray distribution types recorded by Gamma Ray Sensor
identify chemicals in emitting surface– Neutrons are also produced by cosmic ray bombardment and
they are what excites surfaces into emitting gamma rays– They are themselves collected by HEND and Neutron
Spectrometers

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Odyssey 2001 - present Orbiter instrumentation
Gamma Ray Spectrometer (GRS) – Enabled maps of hydrogen abundance in the upper meter or so
of the Martian surface– Hydrogen abundance indicates subsurface water or ice

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Odyssey 2001 - present Orbiter instrumentation
Martian Radiation Environment Experiment (MARIE)– Designed to measure the radiation environment of space between Earth
and Mars and around Mars– Characterizes the space radiation hazard for astronauts en route to or on
the surface of Mars – Space radiation can trigger cancer/ damage the central nervous system

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
High Resolution Imaging Science Experiment (HiRISE) Context Imager (CTX) Mars Color Imager (MARCI) Compact Reconnaissance Imaging Spectrometers for Mars (CRISM) Shallow Subsurface Radar (SHARAD) Mars Climate Sounder (MCS)

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation High Resolution Imaging Science Experiment (HiRISE)
– The most powerful camera ever flown on a spacecraft– Telescopic visible light camera with ~1 m resolution – Near-infrared has ~30-60 cm pixels – Resolution of objects ~1.2 - 2.4 m (such as rovers!)– “The People’s Camera” – citizen science opportunities

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation High Resolution Imaging
Science Experiment (HiRISE)– Joints and halos
structures– Fluid flow along
joints precipitating deposits of “halos”

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation High Resolution Imaging
Science Experiment (HiRISE)– Victoria Crater in
Meridiani– Opportunity rover
on edge of crater

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
Context Imager (CTX):– Coarser resolution camera of a larger area (~30 km swaths at 6 m
per pixel) – Provides a regional context for HiRISE close-ups– Catches interesting regional-scale features
C.M. Rodrigue, 2015Geography, CSULB
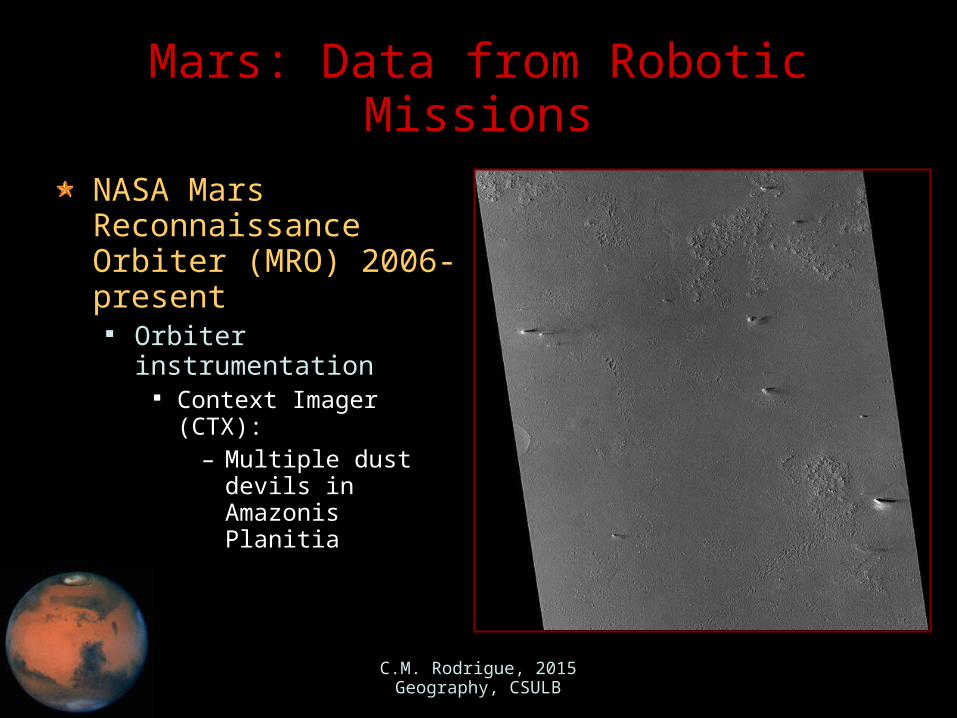
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation Context Imager (CTX):
– Multiple dust devils in Amazonis Planitia

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation Context Imager (CTX):
– Crater in Terra Sirenum with gullied walls

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
Mars Color Imager (MARCI):– Coarser resolution camera– 5 visible light bands and 2 ultraviolet bands– Observe Martian atmospheric processes synoptically and at a
global scale for at least one full Martian year (687 Earth days)– Study interaction of the atmosphere with the surface at a variety of
scales in both space and time – Examine surface features characteristic of Martian climate as it
evolves over time

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
Mars Color Imager (MARCI)
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
Compact Reconnaissance Imaging Spectrometers for Mars (CRISM):– Visible and infrared spectrometers of phenomenal spectral
resolution: 544 bands between 0.36-3.92 microns– Enable maps at ~18 m resolution– Designed to identify spectral signatures associated with minerals
that precipitate out of water, such as gypsum and carbonates
C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
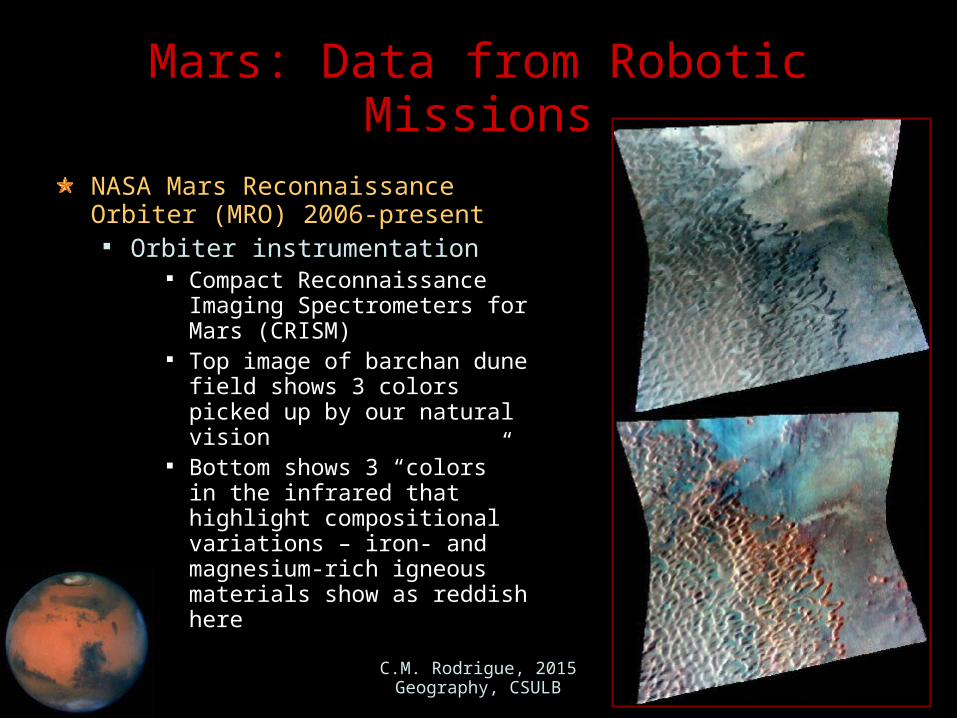
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation Compact Reconnaissance
Imaging Spectrometers for Mars (CRISM)
Top image of barchan dune field shows 3 colors picked up by our natural vision
Bottom shows 3 “colors” in the infrared that highlight compositional variations – iron- and magnesium-rich igneous materials show as reddish here

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present Orbiter instrumentation
Shallow Subsurface Radar (SHARAD):– 15-25 MHz frequency radar – Can penetrate the Martian surface down as far as 1 km – Horizontal resolution of this instrument is about 0.3 - 3 km – Vertical resolution is about 15 m in free space and 10 m underground – Looks for changes in the electrical reflection characteristics of the radar
return that might indicate water or ice or other buried structures Mars Climate Sounder

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation Shallow Subsurface Radar
(SHARAD):
– Buried flood channels under Elysium Planitia
– Ice and dust layers under S. Pole

C.M. Rodrigue, 2015Geography, CSULB
Mars: Data from Robotic Missions
NASA Mars Reconnaissance Orbiter (MRO) 2006-present
Orbiter instrumentation Shallow Subsurface Radar
(SHARAD): Mars Climate Sounder
– Observes temperature, humidity, and dust
– Changes in atmospheric temperature or composition with height
– 9 channels: 1 spanning the VL from 0.3-3.0 microns (near UV and near IR), 8 in the thermal IR from 12-50 microns
– Looks at Martian horizon from orbit to create a vertical layering of readings
– CO2 clouds & snow!!