circuitos y subsistemas para comunicacionesgarciaargos.com/descargas/apuntes/4curso/csc.pdf ·...
TRANSCRIPT

Circuitos y Subsistemas para Comunicaciones
Carlos García Argos,[email protected]
3 de diciembre de 2005


Índice general
1. El receptor superheterodino 5
1.1. Introducción a los sistemas de radiocomunicación . . . . . . . . . . . . . . . . 5
1.2. El espectro radioeléctrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3. Subsistemas que lo componen . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4. Técnicas de rechazo de frecuencia imagen . . . . . . . . . . . . . . . . . . . . 13
1.5. Estado del arte en superheterodino . . . . . . . . . . . . . . . . . . . . . . . . 16
2. Distorsión no lineal y ruido 17
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2. Caracterización de sistemas no lineales . . . . . . . . . . . . . . . . . . . . . . 17
2.3. Parámetros para caracterizar un sistema no lineal . . . . . . . . . . . . . . . . 21
2.4. El transistor bipolar como sistema no lineal . . . . . . . . . . . . . . . . . . . 31
2.5. Superheterodino: el problema de los espúreos . . . . . . . . . . . . . . . . . . 33
2.6. Tipos y fuentes de ruido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.7. Fases en el diseño de amplificadores de radiofrecuencia para mínimo ruido . . . 47
3


Capítulo1
El receptor superheterodino
1.1. Introducción a los sistemas de radiocomunicación
1.1.1. Conceptos básicos de los sistemas de transmisión
Para transmitir información por un medio existen dos posibilidades: banda base y modulaciónde portadora.
La transmisión en banda base se usa sobre todo en sistemas de corta distancia, como por ejemploredes de área local, o bien a distancias mayores pero con otra tecnología, como puede ser laóptica.
Los sistemas de radiocomunicación usan la transmisión con modulación de portadora. Estotiene como ventaja el uso de la Multiplexación por División en Frecuencia (FDM, FrequencyDivision Multiplexing).
Banda relativa: relación entre las frecuencias máxima y mínima que hay en el sistema.
fmax
fmin
Existe un problema derivado de la banda relativa, ya que si esta es mucho mayor que1, lasprestaciones del sistema no son constantes en toda la banda.
Además, se pretende que la relación entre la frecuencia central,f0 y el ancho de banda delsistema sea lo mayor posible. Por ello, se busca situar la banda en las frecuencias más altasposibles.
Según pasa el tiempo, sube la frecuencia de trabajo de los circuitos, lo que permite aumentar losanchos de banda de los servicios sin que aumente la banda relativa, además de permitir antenasmás pequeñas. Por contra, disminuye el área de cobertura, al aumentar la directividad, lo queprovoca que cada vez más se requiera visión directa.
1.1.2. Esquema general de un sistema radio
En la Figura 1.1 se observa el esquema general para un sistema de radiocomunicación, repre-sentando el transmisor, el canal de transmisión y el receptor.
5

1.1. Introducción a los sistemas de radiocomunicación 1. El receptor superheterodino
fuente deinformación modulador
canal RF
demoduladorrepresentación dela información
osc. 1 osc. 2
osc. 3osc. 4banda FI banda RF
+peligro de distorsión
modulación FDM
canal LTI+ruido+interferencia
+peligro de distorsiónT
RA
NSM
ISO
RR
EC
EPT
OR
Figura 1.1: Esquema general de un sistema radio
El canal se considera lineal e invariante en el tiempo, con ruido aditivo e interferencias externas.
En cuanto al transmisor, se tienen en cuenta la frecuencia de emisión, el tipo de modulaciónempleado y la potencia emitida, relacionada con la eficiencia, entre otros parámetros.
Del receptor, se consideran más parámetros:
Frecuencia de funcionamiento.
Sensibilidad o capacidad de discernir señales pequeñas.
Selectividad o la capacidad de distinguir entre la frecuencia deseada y otras no deseadas.
Ancho de banda.
Tipo de modulación, que deberá ser igual a la usada en el transmisor.
Comportamiento frente al ruido.
1.1.3. Ventajas e inconvenientes de la radiocomunicación
Ventajas:
Movilidad de los equipos sin necesidad de cableado.
Facilidad intrínseca para la difusión punto a multipunto.
Comunicaciones aéreas, marítimas o espaciales.
6 Carlos García Argos ([email protected])

1. El receptor superheterodino 1.2. El espectro radioeléctrico
Inconvenientes:
El ruido externo en recepción puede descender en gran medida la calidad.
Interferencias y espúreos.
Falta de privacidad, que puede mitigarse con sistemas de cifrado.
El canal radio presenta atenuación, meteoros, desvanecimientos, etc.
La regulación del espectro es muy estricta, y hay límites en las frecuencias y las potenciasmáximas que pueden emitirse. Esto limita el ancho de banda disponible.
Además de las ventajas e inconvenientes, nos encontramos con los siguientes condicionantes dediseño de los sistemas radio:
Tamaño y peso, que deben ser reducidos.
Consumo o disipación de potencia, también deben ser reducidos.
Costes: ASICs (Circuitos Integrados de Propósito Específico) para producción masiva.
Regulación de emisiones.
Alimentación por baterías.
Número mínimo de puntos de ajuste: el número de valores ajustables para cambiar parámet-ros debe minimizarse.
Como alternativas reales a los sistemas radio, están las comunicaciones ópticas no guiadas pararedes de área local y el cable o fibra óptica para enlaces fijos.
1.1.4. Tendencias en el desarrollo de sistemas radio
Se sigue investigando en el diseño de bajo ruido para aumentar la sensibilidad.
También se desarrolla la tecnología para anular interferencias y espúreos (filtros).
Los circuitos son cada vez más lineales.
Se introducen sistemas de cifrado para garantizar la privacidad y seguridad.
Modulaciones más eficientes, sobre todo las digitales. Por ejemplo, en GSM se usa GM-SK (Gaussian-filtered Minimum Shift Keying), en 3G se usa espectro ensanchado y en4G OFDM (Orthogonal Frequency Division Multiplexing).
Se usan frecuencias cada vez más elevadas, por lo que los circuitos son más complejos.
Carlos García Argos ([email protected]) 7

1.2. El espectro radioeléctrico 1. El receptor superheterodino
ELF (Extremely Low Frequency) 300 Hz - 3 kHz
VLF (Very Low Frequency) 3 - 30 kHz
LF (Low Frequency) 30 - 300 kHz
MF (Medium Frequency) 300 kHz - 3 MHz
HF (High Frequency) 3 - 30 MHz
VHF (Very High Frequency) 30 - 300 MHz
UHF (Ultra High Frequency) 300 MHz - 3 GHz
SHF (Super High Frequency) 3 - 30 GHz
EHF (Extremely High Frequency) 30 - 300 GHz
Tabla 1.1: El espectro radioeléctrico
1.2. El espectro radioeléctrico
ELF, VLF :
Ancho de banda muy pequeño.
Ruido externo muy elevado.
Antenas muy grandes.
Propagación por onda superficial: la onda se propaga por la superficie de separaciónentre tierra y aire.
LF, MF :
Propagación por onda superficial.
A partir de1 MHz aparece propagación ionosférica: la ionosfera se comporta comoun conductor.
La señal sufre desvanecimientos constantes: variaciones climáticas, etc.
Aplicaciones: AM, radionavegación, . . . En general, comunicaciones a larga distan-cia.
HF:
Propagación ionosférica.
Ejemplo: radio por onda corta (radio software), banda ciudadana (CB, 27 MHz,radioaficionados), CT0 (terminales inalámbricos analógicos,20-50 MHz.
Entre1 MHz y 10 MHz, el ruido externo se reduce y aumenta el ruido interno de losreceptores, por lo que es importante considerar el ruido al diseñar el cabezal.
VHF :
Ejemplo: radiodifusión de FM (88-108 MHz) y TV (banda I en54-88 MHz y bandaIII en 174-216 MHz).
Propagación por onda espacial: en línea de visión directa.
8 Carlos García Argos ([email protected])

1. El receptor superheterodino 1.3. Subsistemas que lo componen
En144 MHz están los servicios de walkie-talkie, radios de ambulancias y taxis, . . .
Sistema ILS (Instrumental Landing System) entre108 y 118 MHz o 328-335 MHz.Transmite la trayectoria de acercamiento al avión mediante radiobalizas. Se calculacon la intersección de la senda de planeo (plano horizontal) y el ángulo de plano deacercamiento (plano vertical).
Los osciladores locales para FM en recepción son de98,7 a118,7 MHz, que puedencolisionar con el ILS, de ahí que haya que apagar las radios en los aviones.
UHF:
Canales 21 a 69 de televisión (471-855 MHz): ancho de banda formado por unaseñal compuesta de8 MHz (7 en EEUU) y modulación en BLV.
Planificación de frecuencias.
Telefonía móvil: GSM900, DSC1800, DECT (1800), UMTS (2 GHz), . . .
RADAR, radionavegación.
IRIDIUM ( 1621-1626 MHz y 2483-2500 MHz): Globalstar.
WLAN: 2,45 GHz, banda ISM (Instrumental, Científica y Médica).
GPS (Global Positioning System): radiolocalización mundial con triangulación us-ando satélites en1575,42 y 1227,6 MHz. Modulación BPSK, resolución inferior a100 m. DGPS (GPS diferencial) usa estación terrena que proporciona resolución demenos de 1 m.
SHF:
A partir de1 GHz son microondas.
Servicios fijos, radioenlaces terrenales.
Hispasat:12 GHz en enlace descendente y13-14 GHz en enlace ascendente.
EHF:
Ondas milimétricas.
Radioenlaces digitales hasta40 GHz.
A 77 GHz: experimento de comunicación entre coches.
1.3. Subsistemas que componen el receptor superheterodino
1.3.1. Introducción
Apareció sobre 1920. La mayoría de los receptores de radio actuales tienen una estructura basa-da en él. Se pueden ver los bloques de esta estructura en la Figura 1.2.
La frecuencia del oscilador local es diferente de la de radiofrecuencia,ωOL 6= ωRF .
Además, lafrecuencia intermedia, definida como
ωFI = |ωOL − ωRF |
Carlos García Argos ([email protected]) 9

1.3. Subsistemas que lo componen 1. El receptor superheterodino
seguimiento(tracking)
CAG
DEMODULADOR
a RF
FIRF
banda base
Figura 1.2: Esquema del receptor superheterodino
está por encima de la banda de audio. NotaremosωFI = FI, ωOL = OL y ωRF = RF
El demodulador necesita una relación señal a ruido determinada, una señal de entrada de unnivel mínimo (sensibilidad) y que le entre un solo canal. Para ello, la cadena previa tendrá quediseñarse de forma adecuada.
El primer filtro (filtro de preselección) es de frecuencia variable, y la función que cumple es lade eliminar las fecuencias ajenas, como por ejemplo la frecuencia imagen. El segundo filtro esfijo y muy selectivo.
Si nos olvidamos del filtro de preselección, para quedarnos con el canal de RF, se varía OL, yasea mediante una capacidad variable, un varactor, un VCO, etc.
En cambio, la frecuenciaFI es fija. Por ejemplo, en FM,FI = 10,7 MHz. Esto permite que elfiltro de frecuencia intermedia sea muy selectivo, ya que lo realmente difícil de construir es unfiltro variable muy selectivo.
El mezclador es, básicamente, un multiplicador, que se implementará con células de Gilbert,función cuadrática, . . . , y a su salida se obtienen señales a frecuenciasOL + RF , OL − RFy RF − OL. Sólo pasarán el filtro de frecuencia intermedia las señales que estén a frecuenciaFI.
El CAG (Control Automático de Ganancia) por lo general controla la ganancia de la etapa FI,y en algunos casos también la de RF. Se busca que el nivel de la salida sea estable y evitar lasaturación en las etapas posteriores de amplificación. Normalmente la etapa de FI se divide envarias etapas, y el CAG se aplica a la primera.
1.3.2. Parámetros del superheterodino
Sensibilidad: es la capacidad del receptor de responder a señales débiles de radiofrecuencia.Se especifica como los voltios necesarios a la entrada para que a la salida se cumpla ciertocriterio de calidad y se mide enµV o endBµV .
Valores típicos se encuentran entre0,25 µV y 10 µV , siendo el primer valor típico encomunicaciones por satélite y considerándose el segundo un valor pobre. Un valor inter-medio de1 µV se considera una buena sensibilidad.
Con una mayor sensibilidad se consigue mayor cobertura del servicio. Sin embargo, elruido externo hasta20 o 30 MHz limita más la calidad de la señal recibida, mientras quea partir de esa frecuencia, el ruido externo no es tan importante y es cuando se tiene en
10 Carlos García Argos ([email protected])

1. El receptor superheterodino 1.3. Subsistemas que lo componen
cuenta la sensibilidad a la hora de hacer el diseño.
zona limitadapor el ruido
zona donde se tieneen cuenta la sensibilidad
20−30 MHz
ruid
o ex
tern
o
frecuencia
Figura 1.3: Relación entre ruido externo y frecuencia
Factor de RuidoF : también llamada “figura de ruido”, mide el ruido interno del receptor. Sepuede definir como el cociente de la SNR a la entrada de la etapa de RF entre la SNR a lasalida de la etapa de FI, suponiendo que el ruido a la entrada eskT0B, siendoB el anchode banda más estrecho de la etapa intermedia, y se llamaancho de banda equivalente deruido.
F =SNRRF
SNRFI
Para que se cumpla esta definición, además de ser el ruido a la entradakT0B, debe haberadaptación de impedancias a la entrada. Es posible dar otra definición más rigurosa:
F =Potencia disponible de ruido a la salida
Potencia disponible de ruido a la salida procedente de la entrada
El esquema con el que se define la figura de ruido es el que se ve en la Figura 1.4. Conadaptación y a temperaturaT0 = 290 K:
vn =√
4kTBRg =√
4kT0BRg
Entonces, siRin = Rg, la potencia de ruido entregada es
PN = kT0B
Normalmente, a la entrada de un superheterodino se tiene una antena, que tendrá un ruidodiferente dekT0B, ya que la antena consta (virtualmente) de una resistencia de radiación,Rrad. La resistencia de radiación se define como la capacidad de radiación de la antena,o su rendimiento. Es una resistencia ficticia, ya que no genera ruido térmico.
A la entrada de la antena habrá un ruido externo. SobreRrad sí se podría definir el ruidocomokT0B. Entonces, si ese ruido externo es mucho mayor quekT0B, la aportación delruido del superheterodino a la salida es despreciable. Es el caso de baja frecuencia quese vió en la Figura 1.3. En cambio, si el ruido externo es similar en magnitud o inferiorakT0B, el ruido del superheterodino a la salida no se puede despreciar, por lo que habráque hacer diseño de bajo ruido.
Carlos García Argos ([email protected]) 11

1.3. Subsistemas que lo componen 1. El receptor superheterodino
Rg Rg vn
DUT
Rin=Rg
DUT
Figura 1.4: Modelado de la figura de ruido
El factor de ruido de un superheterodino no se puede aplicar tal cual a las condicionesnormales de funcionamiento, sino que habrá que calcular el ruido interno a partir delfactor de ruido y luego la calidad a partir del ruido interno.
Selectividad: es la capacidad del receptor de dejar pasar el canal deseado y bloquear los canalesadyacentes.
Para medirla, se utilizan dos tonos a la entrada, uno a la frecuencia deseadaRF y otroa una frecuencia adyacenteFA. El receptor se sintoniza a la frecuencia deseada, y semiden las potencias de ambas señales de entrada a la salida del receptor, por separado. Laselectividad es el cociente de los niveles de señal de ambas frecuencias a la salida.
Sel(dB) = 10 logPdeseada
Padyacente
(dB)
Depende de la forma de los filtros, y, principalmente, de la etapa de FI. Valores buenosestán entre30 y 40 dB.
Rechazo a frecuencia imagen:se define de la misma forma que la selectividad, pero tomandoFA = FE. Será entonces la relación entre las potencias de la portadora deseada y sufrecuencia imagen, medidas a la salida de la etapa de FI, suponiendo que la potenciade entrada es la misma en ambas. En este caso, depende sobre todo de la etapa de RF,concretamente del factor de forma del filtro de preselección. En la Figura 1.5 se definenla banda de paso y la banda “falda”, de manera que
factor de forma = FF =banda falda
banda paso
f0
60dB
3dB
f
banda de paso
banda "falda"
Figura 1.5: Definición del factor de forma
Para un filtro móvil, se requiereQ ≈ 50 y FF ∈ [3, 6].
12 Carlos García Argos ([email protected])

1. El receptor superheterodino 1.4. Técnicas de rechazo de frecuencia imagen
Valores típicos del factor de forma oscilan entre3 y 6, considerándose valores por encimade10 pobres y entre1 y 2 de difícil diseño. Además, el rechazo de imagen suele ser de30 o 40 dB.
Rechazo a frecuencia intermedia:es la relación entre la potencia a la salida del receptor deun tono de entrada a frecuenciaRF y la de un tono de entrada a frecuenciaFI
Rechazo FI(dB) = 10 logPdeseada
PFI
DondePFI es la potencia a la salida si la frecuencia de entrada esFI. Los mezcladorestienen una característica lineal residual, que hace que señales aFI se cuelen sin mezclarse.Esto es muy dañino, y por eso está prohibido emitir a las frecuencias intermedias comer-ciales.
Este parámetro depende del filtro del amplificador de la etapa RF.
Margen dinámico: es el rango de potencias comprendidas entre la sensibilidad (potencia mín-ima) hasta un valor máximo dado por el límite de funcionamiento lineal del sistema.
El límite superior normalmente queda establecido por la distorsión no lineal, que puededarse en el punto de compresión a1 dB, aparición de productos de intermodulación, etc.Es muy importante sobre todo en sistemas móviles, donde el nivel de la señal a la entradavaría mucho.
Fidelidad: es una medida de la calidad de la señal a la salida del receptor, dependiente de laaplicación. Depende de muchas características del receptor, como la linealidad, el ruido,etc.
Se pueden usar varios parámetros para medirla: SNR, SINAD (Signal to Noise and Dis-tortion), BER, THD (Total Harmonic Distortion), etc.
1.4. Técnicas de rechazo de frecuencia imagen
Una primera alternativa para rechazar la frecuencia imagen es aumentar la frecuencia interme-dia. De esa forma,FE = 2FI + RF se aleja más deRF , sin embargo, la construcción de losfiltros de FI es más complicada cuando sube la frecuencia. Por ello, se buscan otras alternativas:
1. Conversión superior: se toma la suma que genera la mezcla en lugar de la diferencia, estoes,
FI = RF + OL
Ahora aparece un espúreo al que se llama frecuencia imagen, aunque no la hay:
2FI −RF = FE
OL− FE = OL− 2FI + RF = FI
Ejemplo 1.1Si tenemosFI = 160 MHz y OL = 60 MHz, entoncesRF = 100 MHz y elespúreo está enFE = 220 MHz, es decir, muy alejado deRF . ¥
Carlos García Argos ([email protected]) 13

1.4. Técnicas de rechazo de frecuencia imagen 1. El receptor superheterodino
Se utiliza más en baja frecuencia, ya que en alta no es una técnica tan buena. Un ejemplode sistemas que usan conversión superior son los analizadores de espectro.
2. Doble conversión: se utilizan dos mezcladores para generar dos frecuencias intermediasdiferentes. Se llama también “doble heterodinación”. Se puede ver el esquema de estesistema en la Figura 1.6.
La primera frecuencia intermedia es más elevada que la segunda. Se pueden usar diversasconfiguraciones, como doble conversión hacia abajo o primero hacia arriba y luego haciaabajo, siendo más usada la primera.
seguimiento(tracking)
RF FI1
OL1 OL2
FI2
Figura 1.6: Esquema de doble conversión para rechazo de imagen
Con la primera frecuencia intermedia,FI1, se busca gran rechazo a frecuencia imagen,aunque tenga menor selectividad. Además, actúa de filtro de preselección paraFI2.
Con la segunda frecuencia intermedia,FI2, se busca mucha selectividad (altoQ) conFI2 baja y usando buenos filtros.
Ejemplo 1.2En los teléfonos inalámbricos analógicos (CT0), se usa la banda alrededor de50 MHz. Si RF = 49 MHz, para voz con ancho de banda de4 kHz en FMusando desviación de frecuencia∆f = 5 kHz,
BWFM ≈ 2 (∆f + BWm) = 18 kHz
Se usan canales de20 kHz y con las frecuencias intermedias estandarizadaspara FM (FI1 = 10,7 MHz) y AM (FI2 = 455 kHz), vemos que si se midierala selectividad en FI1, elQ necesario es mucho mayor:
QFM =10,7 MHz20 kHz
= 535 QAM =455 kHz20 kHz
= 22,75
Las frecuencias de los osciladores locales para las dos etapas son:
OL1 = FI1 + RF = 59,7 MHz
OL2 = FI2 + FI1 = 11,155 MHz
Y las frecuencias imagen resultan:
FE1 = 2FI1 + RF = 70,4 MHz
FE2 = 2FI2 + FI1 = 11,61 MHz
La primera,FE1, es muy alta, por lo que no hay problema con ella, mientrasque la segunda tendrá que eliminarla el filtro de la etapa FI1. ¥
14 Carlos García Argos ([email protected])

1. El receptor superheterodino 1.4. Técnicas de rechazo de frecuencia imagen
La doble conversión funciona mejor con frecuencias altas y/o anchos de banda estrechos.Por ejemplo, para FM comercial, con canales de200 kHz, resulta unQ ≈ 53 para unasola conversión, de manera que no es necesaria la doble conversión.
3. Mezcladores balanceados: en la Figura 1.7 se puede ver el esquema de un mezcladorbalanceado para rechazo de imagen. En él, se toma el oscilador local y se desfasa90
(π/2), para mezclar las dos componentes (fase y cuadratura) con la señal de entrada. A lasalida se suman los resultados, volviendo antes a desfasar−90 la rama que anteriormentese desfasó. Los dos mezcladores empleados deben tener las mismas características.
π/2−π/2
RF=A(t)cos ωRF
t
FE=A i(t) cos ωit
sen ωOL
t
cos ωOL
t A
C
B
OL
FI=OL+RFó
FI=OL−RF
Figura 1.7: Mezclador de rechazo de imagen
Si ωi > OL, en C se tiene
C =A(t)
2cos (ωOL − ωRF ) t +
A(t)
2cos (ωOL + ωRF ) t−
−Ai(t)
2cos (ωi − ωOL) t +
Ai(t)
2cos (ωi + ωOL) t
Entonces, a la salida del mezclador balanceado, la suma resulta:
A + C = A(t) cos (ωOL − ωRF ) t + A(t) cos (ωOL + ωRF ) t
Donde el primer término es el de conversión inferior y el segundo el de conversión supe-rior. El términoAi(t) cos (ωOL + ωi) t se elimina por filtrado.
En general, para una entradaA(t) cos ωt, en las salidas de los mezcladores se tiene:
A(t) cos ωt cos ωOLt =A(t)
2cos (ωOL + ω) t +
A(t)
2cos (ωOL − ω) t
A(t) cos ωt sen ωOLt =A(t)
2sen (ωOL + ω) t +
A(t)
2sen (ω − ωOL) t
Para las ramas superior e inferior, respectivamente. Tras el desfase en la inferior, la entradaal sumador de esta rama queda:
A(t)
2cos (ωOL + ω) t− A(t)
2cos (ω − ωOL) t
Y, por tanto, la salida del mezclador de rechazo de imagen será:
A(t) cos (ωOL + ω) t +A(t)
2cos (ωOL − ω) t− A(t)
2cos (ω − ωOL) t
Carlos García Argos ([email protected]) 15

1.5. Estado del arte en superheterodino 1. El receptor superheterodino
1.5. Estado del arte en superheterodino
En la actualidad, se tiende a una progresiva integración de los circuitos de radiofrecuencia, tantopara frecuencia intermedia como para radiofrecuencia, demoduladores, etc. Esto permite que larealización de sistemas receptores se simplifique, ya que sólo hay que adquirir los circuitos inte-grados y conectar la circuitería externa (resistencias, condensadores, . . . ). Esto también permiteuna mejora de las prestaciones y disminución del coste.
Además, se usan osciladores locales basados en PLL programables digitalmente.
Tras la etapa de frecuencia intermedia se pueden usar demoduladores analógicos y digitales,siendo la tendencia actual el uso de procesadores digitales de señal (DSP).
Esto requiere la introducción de conversión analógico-digital y digital-analógico. Se puede hac-er incluso en la etapa de radiofrecuencia, dependiendo de la frecuencia de los conversores.
La evolución de la sintonía de radiofrecuencia puede verse en los siguientes pasos:
1. Condensadores de capacidad variable mecánicamente.
2. Varactores o varicaps: variables por tensión.
3. Digital: memoria con diferentes tensiones para generar las portadoras en un varactor.
4. Osciladores controlados por tensión (VCO) con PLL digitales.
5. Se elimina el ajuste o sintonía, y se usan filtros de banda que toman la banda del serviciocompleta mediante, por ejemplo, filtros SAW, muy selectivos. Son filtros fijos, por lo quese debe garantizar que los espúreos queden fuera de la banda, tomandoFI elevada, paraqueFE caiga fuera de la banda. Por ejemplo, en GSM la banda va de935 a 960 MHz,y con un filtro SAW de ancho de banda de25 MHz, la frecuencia intermedia debe serFI > 12,5 MHz.
16 Carlos García Argos ([email protected])

Capítulo2
Distorsión no lineal y ruido
2.1. Introducción
La distorsión que introduce un sistema en las señales permite estudiar su fidelidad. Se establecenunos límites en la distorsión que debería introducir el sistema, asegurando una calidad dada.
Existen dos tipos de distorsión:
Lineal: aparece en sistemas lineales. Es recuperable mediante procesos de igualación oecualización. A la salida del sistema no se generan frecuencias nuevas. Tiene, a su vez,dos tipos:
De amplitud: la respuesta de amplitud en frecuencia no es plana, sino que diferentesfrecuencias se atenúan de forma diferente.
De fase: la respuesta de fase no es lineal con la frecuencia, sino que diferentesfrecuencias tienen diferentes retardos. Es problemática en señales de banda ancha,vídeo, etc.
No lineal: no es recuperable. La salida no es proporcional a la entrada, ya que se generancomponentes frecuenciales que no existían a la entrada.
Además de la distorsión introducida por el sistema, existen reflexiones y ecos introducidospor el canal de transmisión. Por tanto, dependen de éste, y generan distorsión lineal de ambostipos. La solución a este problema es usar igualadores de amplitud y fase adaptativos, es decir,variantes con el tiempo. Ejemplos de estos canales son los móviles, aquellos en los que no hayaadaptación de impedancias, etc.
2.2. Caracterización de sistemas no lineales
2.2.1. Conceptos básicos
Todos los sistemas son no lineales. La suposición de sistema lineal en la que se basa la teoría decircuitos básica sólo es, en la práctica, una aproximación. En algunos casos, se utilizan comosi fueran lineales, y la no linealidad es responsable de la degradación de sus prestaciones. Enotros, se aprovecha la no linealidad, como en los mezcladores.
17

2.2. Caracterización de sistemas no lineales 2. Distorsión no lineal y ruido
Los sistemas lineales son aquellos que se definen como los que cumplen el principio de super-posición. Matemáticamente, si la entrada esx y la saliday,
y = f(x) = ax
Los sistemas no lineales, en cambio, quedan definidos por una característica de transferenciapolinómica:
y = ax + bx2 + cx3 + . . . zxn
Consideraremos sistemas sin memoria. En caso de que haya sistemas con memoria, se descom-pondrá en un sistema lineal con memoria y uno no lineal sin memoria. Ejemplos de sistemas nolineales son un amplificador en saturación, diodos rectificadores o un mezclador.
Analizaremos además el desarrollo de tercer orden del polinomio y conc < 0, de manera que lacaracterística de transferencia tenga una asíntota horizontal, como la respuesta de la Figura 2.1.Además, en esa respuesta existe una zona en la que la relación es lineal, aplicable a pequeñaseñal.
y=f(x) x
y
Figura 2.1: Sistema no lineal
Ejemplo 2.1En la Figura 2.2 se puede ver el sistema equivalente de un mezclador, y a contin-uación veremos la caracterización del sistema con dos tonos de entrada.
x2(t)
x1(t)
x2(t)
x1(t) k(·) 2 y(t)y(t)
Figura 2.2: Ejemplo de caracterización de un mezclador
Si x1(t) = V1 cos ω1t y x2(t) = V2 cos ω2t, la salida será, usando el primer esque-ma:
y(t) = V1V2 cos ω1t cos ω2t =V1V2
2(cos (ω1 + ω2) t + cos (ω1 − ω2) t)
En el segundo esquema, se utiliza la función elevar al cuadrado, y resulta
y(t) =1
2
(kV 2
1 + kV 22
)+ (2.1)
+1
2kV 2
1 cos 2ω1t +1
2kV 2
2 cos 2ω2t + (2.2)
+ kV1V2 (cos (ω1 + ω2) t + cos (ω1 − ω2) t) (2.3)
18 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.2. Caracterización de sistemas no lineales
El término (2.2) son los armónicos de orden 2, mientras que el término (2.3) es elproducto de intermodulación (PIM) de orden 2. ¥
Se observa en el anterior ejemplo que las componentes a la salida de un sistema no lineal quetiene a su entrada dos tonos son unos armónicos de cierto orden para cada frecuencia de entraday unos productos de intermodulación, combinación lineal de esas frecuencias de entrada. Laaparición de armónicos no deseados es lo que se conoce comodistorsión armónica.
Estudiaremos la distorsión de sistemas en banda estrecha, con tonos como señal de entrada,para ver los armónicos de salida y los diferentes PIM que se producen.
2.2.2. Excitación por un tono
Utilizamos la respuesta de orden 3 para un sistema no lineal,
y(t) = ax(t) + bx2(t) + cx3(t)
Y para una entradax(t) = V cos ωt
se obtiene la siguiente salida:
y(t) = aV cos ωt + bV 2 cos2 ωt + cV 3 cos3 ωt =
=1
2bV 2 +
(aV +
3
4cV 3
)cos ωt +
b
2V 2 cos 2ωt +
c
4V 3 cos 3ωt
Donde se observan los armónicos generados:
Componente de continua, debida al orden 2,
a0 =1
2bV 2
Fundamental, debido a los órdenes 1 y 3,
a1 = aV +3
4cV 3
Armónico de orden 2,
a2 =b
2V 2
Armónico de orden 3,a3 =
c
4V 3
Para un sistema de ordenn, se tendrán a la salida armónicos de ordenn, n− 1, n− 2, . . .2.
Los términos de orden par contribuyen a la continua y a los armónicos pares, mientras que losde orden impar lo hacen en el fundamental y a los armónicos impares.
Normalmente,|a| À |b| À |c| À . . ., por lo que para pequeña señal se puede aproximar a unsistema lineal.
Carlos García Argos ([email protected]) 19

2.2. Caracterización de sistemas no lineales 2. Distorsión no lineal y ruido
2.2.3. Excitación por dos tonos
Cuando se introducen dos tonos a frecuencias diferentes, además de los armónicos correspon-dientes a cada tono, aparecen productos de intermodulación (PIM).
La entrada esx(t) = V1 cos ω1t + V2 cos ω2t
Entonces, la salida, para un sistema de orden 3, será
y(t) = a (V1 cos ω1t + V2 cos ω2t) + b (V1 cos ω1t + V2 cos ω2t)2 + c (V1 cos ω1t + V2 cos ω2t)
3
=1
2
(bV 2
1 + bV 22
)+ (2.4)
+
(aV1 +
3
2c
(V1V
22 +
1
2V 3
1
))cos ω1t + (2.5)
+
(aV2 +
3
2c
(V2V
21 +
1
2V 3
2
))cos ω2t + (2.6)
+1
2bV 2
1 cos 2ω1t + (2.7)
+1
2bV 2
2 cos 2ω2t + (2.8)
+ bV1V2 (cos (ω1 + ω2) t + cos (ω1 − ω2) t) + (2.9)
+1
4cV 3
1 cos 3ω1t + (2.10)
+1
4cV 3
2 cos 3ω2t + (2.11)
+3
4cV 2
1 V2 (cos (2ω1 + ω2) t + cos (2ω1 − ω2) t) + (2.12)
+3
4cV 2
2 V1 (cos (2ω2 + ω1) t + cos (2ω2 − ω1) t) (2.13)
A continuación describimos cada una de las componentes de la salida:
(2.4): es la componente de continua.
(2.5): es la componente a frecuencia fundamentalω1.
(2.6): es la componente a frecuencia fundamentalω2.
(2.7): es el armónico de orden 2 deω1.
(2.8): es el armónico de orden 2 deω2.
(2.9): la componente de productos de intermodulación de orden 2.
20 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.3. Parámetros para caracterizar un sistema no lineal
(2.10): armónico de orden 3 deω1.
(2.11): armónico de orden 3 deω1.
(2.12) y (2.13): son las dos partes de los productos de intermodulación de orden 3.
Para un sistema genérico de ordenn, se generarán productos de intermodulación de órdenesn,n− 1, n− 2, . . .2, además de los armónicos de los mismos órdenes para cada frecuencia.
El orden de un producto de intermodulación es|k|+|m| si la componente escos (kω1 ±mω2) t,siendok,m ∈ Z. Es decir, es la suma de los valores absolutos de los coeficientes de frecuencia.
Ejemplo 2.2Tenemos dos tonos a frecuenciasf1 = 100 MHz y f2 = 110 MHz, correspondientesaRF y OL. En la Figura 2.3 se observan algunos de los armónicos y productos deintermodulación. Los más peligrosos son los PIM de orden 3 que pueden caer en lafrecuencia intermedia.
En este caso,FI = 10 MHz, por lo que el PIM32ω1 − ω2 = 2 · 110 − 210 = 10cae enFI.
100 110 f (MHz) 100 110 210200 2201209010 f (MHz)
Figura 2.3: Ejemplo de productos de intermodulación
¥
2.3. Parámetros para caracterizar un sistema no lineal
No siempre se puede conocer con exactitud el polinomio que representa la característica detransferencia de un sistema no lineal, por lo que hay que usar parámetros que caractericen alsistema.
2.3.1. Distorsión armónica total
Dado un tono de frecuenciaω, x(t) = V cos ωt, entrada a un sistema lineal, su salida es
y(t) =n∑
i=1
ai cos iωt
Carlos García Argos ([email protected]) 21
2.3. Parámetros para caracterizar un sistema no lineal 2. Distorsión no lineal y ruido
Se define la Distorsión Armónica Total (DAT) como
DAT =
√√√√n∑
i=2
a2i
√√√√n∑
i=1
a2i
(×100 %)
En general, se suele dar el caso dea À b y a À c, es decir,a1 À a2, a3. Por lo tanto, se puedesimplificar la expresión:
DAT ≈√
a22 + a2
3 + . . . + a2n
a1
Para un sistema no lineal de orden 3, siendo la entrada un tonox(t) = V cos ωt, la distorsióntotal queda
DAT ≈
√b2
4V 2 +
c2
16V 4
a +3
4cV 2
Valores aceptables de laDAT son del1 % o el2 %.
El valor de laDAT depende del sistema y de la potencia de la señal, no sólo del sistema.
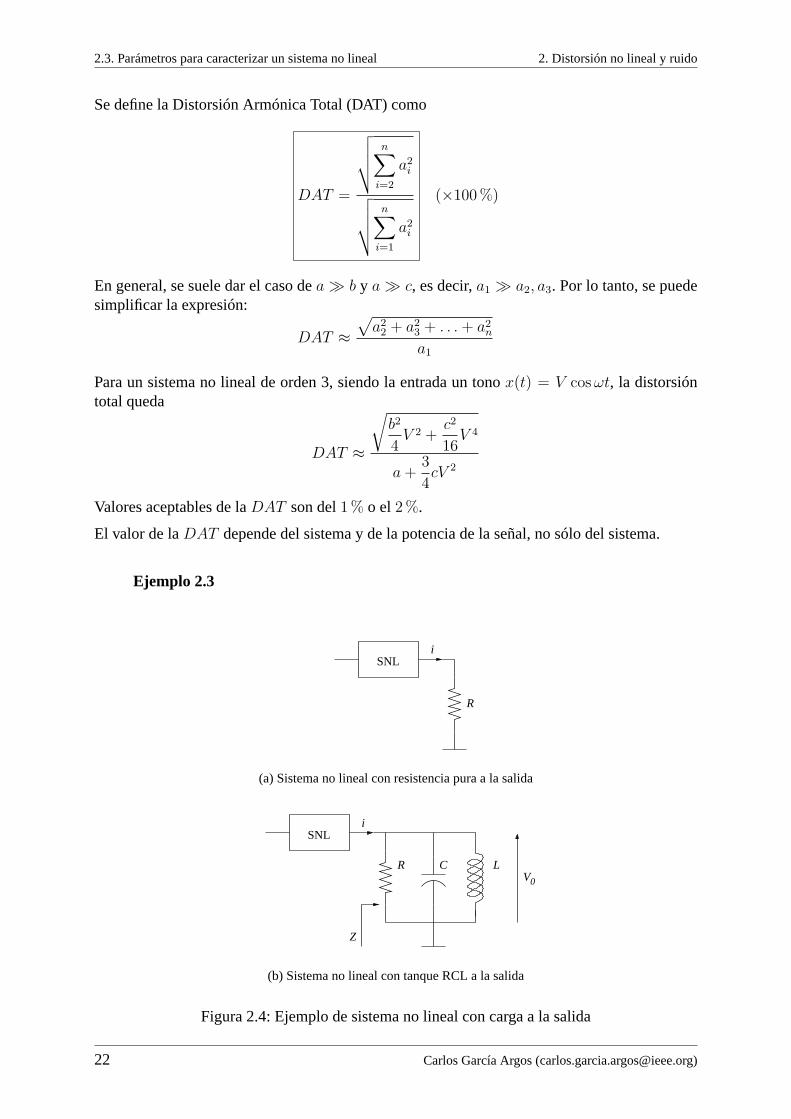
Ejemplo 2.3
SNL
R
i
(a) Sistema no lineal con resistencia pura a la salida
V0
SNLi
C LR
Z
(b) Sistema no lineal con tanque RCL a la salida
Figura 2.4: Ejemplo de sistema no lineal con carga a la salida
22 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.3. Parámetros para caracterizar un sistema no lineal
En el sistema de la Figura 2.4(a) la potencia de salida es
PR =|V |22R
=|i|2R
2
Como la resistencia es pura, los armónicos ven todos la misma impedancia (Z(jω) =R), y por ello,
DAT = f(an) ∀n = 1, . . . n
En cambio, para el sistema que se ve en la Figura 2.4(b), la impedanciaZ varía conla frecuencia, así que variará también para cada armónico.
Z(s) =
1
Cs
s2 +1
RCs +
1
LC
∣∣∣∣∣∣∣s=jω
⇒ Z(jω) =jω
C
−ω2 + jω
RC+
1
LC
=⇒ Z(jω) =R
1 + jQ
(ω
ω0
− ω0
ω
)
Siendo
ω0 =1√LC
BW =1
RCQ =
ω0
BW
Enω = ω0, esZ(jω0) = R. Entonces, para el tono fundamental (n = 1),
P1 = P |ω=ω0=
1
2Ra2
1 |Z(ω0)|2 =a2
1
2R
Para cualquier otron, es decir, los armónicos, la impedancia varía, y la potencia delos armónicos depende de la carga:
Pn = P |ω=nω0=
1
2Ra2
n |Z(nω0)|2
|Z(nω0)|2 =
R2 + R2Q2
(ω
ω0
− ω0
ω
)2
(1 + Q2
(ω
ω0
− ω0
ω
)2)2
∣∣∣∣∣∣∣∣∣∣∣ω=nω0
=R2
1 + Q2
(n− 1
n
)2
Si la carga es sintonizada, la distorsión total depende delQ del circuito:
DAT =
√P2 + P3 + . . . + Pn√P1 + P2 + . . . + Pn
≈√
P2 + P3 + . . . + Pn√P1
= f(an, Q)
Y si Q aumenta, disminuye la distorsión armónica total. ¥
Ejemplo 2.4Se tiene un sistema no lineal con la siguiente función de transferencia:
y(t) = x− 0,1x3
Carlos García Argos ([email protected]) 23

2.3. Parámetros para caracterizar un sistema no lineal 2. Distorsión no lineal y ruido
Se pide calcular la distorsión armónica total para una señal de entrada senoidal deamplitud0,5,
x(t) = V cos ωt = 0,5 cos ωt
La señal de salida que se obtiene es
y(t) = V cos ωt− 0,1V 3 cos3 ωt =
=
(V − 3
40,1V 3
)cos ωt− 0,1
V 3
4cos 3ωt
Los coeficientes quedan
a1 = V − 3 · 0,14
V 3 a2 = 0 a3 = −0,1V 3
4
Y por tanto, la distorsión armónica total es
DAT =
√a2
2 + a23√
a21 + a2
2 + a23
≈ a3
a1
= 0,64 %
Si aumenta la amplitud de la señal de entrada, por ejemploV = 1, entonces ladistorsión armónica total aumenta también
DAT ≈ 2,7 %
¥
La distorsión debida a un armónico es
Dn =an
a1
· 100 %
2.3.2. Punto de compresión a1 dB
La compresión de ganancia que sufren los sistemas no lineales se caracteriza con el punto decompresión a1 dB, que es el punto de potencia de entrada para el cual la ganancia del sistemaes la de pequeña señal menos1 dB.
y = ax + bx2 + cx3
SNLvg
Rg
v0RLvin
Rin
Figura 2.5: Esquema de un sistema no lineal para cálculo del PC1dB
Para el sistema de la Figura 2.5, se definen la potencia de entrada y la potencia de salida conimpedancia de carga sintonizada (ZL = RL, a la frecuencia fundamental) y amplitudes de lasseñales de entrada y salidaVin y Vo respectivamente:
Pin =V 2
in
2Rin
Po =V 2
o
2RL
24 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.3. Parámetros para caracterizar un sistema no lineal
A la frecuencia fundamental, la amplitud de salida es
Vo|ω=ω0= aVin +
3
4cV 3
in
La ganancia se define como la relación entre la potencia de salida y la de entrada:
G =Po
Pin
=Rin
RL
· V 2o
V 2in
Y para el sistema no lineal de orden 3 queda
G =Rin
RL
(a +
3
4cV 2
in
)2
=Rin
RL
(a +
3c
2RinPin
)2
La ganancia de pequeña señal o ideal se define paraVo = aVin
Gps =Rin
RL
a2
Y se puede relacionar con la expresión general:
G = Gps
(1 +
3c
2aRinPin
)2
Si c < 0 y a > 0, entoncesG < Gps. Es decir, que se pierde ganancia en función del valor dela potencia de entrada. En la Figura 2.6 se representa una función genérica de ganancia, con laindicación del punto de compresión a1 dB (PC1dB) y de las zonas de comportamiento lineal yno lineal.
1 dB
Pin
zona nolineal
G (dB)
PC1dB
zona lineal
Figura 2.6: Compresión de ganancia en un sistema no lineal
Se define para la ganancia de potencia la relación de compresión como
CR = 10 logGps
Gp
= −20 log
(1 +
3c
4aV 2
in
)= −20 log
(1 +
3c
2aRinPin
)
El punto de compresión a1 dB es aquel para el queCR = 1 dB. Es decir, es aquella potenciade entrada para la cual la ganancia de potencia real es1 dB inferior a la de pequeña señal.
Carlos García Argos ([email protected]) 25

2.3. Parámetros para caracterizar un sistema no lineal 2. Distorsión no lineal y ruido
2.3.3. Punto de intersección de tercer orden
Este parámetro se define para caracterizar la degradación debida a los productos de intermod-ulación de tercer orden producido por dos interferentes cercanas. La medida de este punto serealiza a partir del mismo sistema definido en la Figura 2.5, realizando una medida con dostonos.
Primero, se toma una amplitud de los tonos de entrada suficientemente pequeña para que sepuedan despreciar los términos no lineales de orden superior y la ganancia sea aproximada-mente constante e igual aα1. Según aumenta la amplitud de la señal de entrada, la amplitud desalida de los tonos fundamentales aumenta linealmente conV , mientras que los productos deintermodulación crecen comoV 3. En la Figura 2.7(a) está representado el punto de intersec-ción de tercer orden y en la Figura 2.7(b) se ve la representación logarítmica, dondeIIP es elpunto de intersección de entrada,OIP el punto de intersección de salida yIMR la relación deintermodulación.
P0 , P03
Pin
Vα1
α3V33
4
(a) Representación gráfica del punto de intersec-ción de tercer orden
P0 , P03
Pin
Vα1
α3V33
4
IIP
OIP
IMR
(b) Representación logarítmica del puntode intersección de tercer orden
Figura 2.7: Punto de intersección de tercer orden
Para cualquier punto de la curva, se tiene (en decibelios)
IMR = 2(OIP − Po)
OIP =IMR
2+ Po =
IMR
2+ Pin + G
ComoIIP = IMR/2 + Pin, entonces
OIP = IIP + G
IMR = 2(OIP − Po) = 2(IIP − Pin)
2.3.4. Margen dinámico
Se define el margen dinámico como la relación entre los niveles máximo y mínimo de poten-cia que garantizan el buen funcionamiento del sistema. En general, se define para valores depotencia de entrada.
26 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.3. Parámetros para caracterizar un sistema no lineal
Pin
1dB
N0
MD∆
P0
IMR
SFDM
MDS
PC1dB
MD
Figura 2.8: Representación de las magnitudes relacionadas con el margen dinámico
El límite inferior se sitúa donde la relación señal a ruido de salida se anula (endB), es decir, elvalor de entrada para que en la salidaPs = Pruido.
La mínima señal discernible o MDS es el suelo de ruido, o algunos decibelios por encima odebajo, según la definición que se emplee.
El límite superior para el margen dinámico lo establece el punto de compresión a1 dB.
El margen dinámico se define, normalmente, como
MD = PC1dB −MDS
El margen dinámico incremental,MD∆, se define como la distancia entreMDS y el nivel depotencia de entrada necesario para alcanzar unIMR dado
MD∆ = Pin|IMR −MDS
El margen dinámico libre de espúreos,SFDM es el punto dePIM3 de suelo de ruido. Sirvepara asegurar que no influyen los productos de intermodulación de orden 3 a la salida.
SFDM = Pin|P03=No−MDS
Suelen cumplir la relaciónMD > MD∆ > SFDM
Si So/No = 1, temperaturaT = T0 y hay adaptación,
F =Si/Ni
So/No
=Si
Ni
Si Si = NiF = MDS( dBm), entonces, dado quekT0 = −174 dBm/Hz,
MDS( dBm) = 30 + 10 log FkT0B = −144 + NF (dB) + 10 log B(Hz)
2.3.5. Desensibilización y bloqueo
La desensibilización consiste en una compresión o reducción en el fundamental debida a unaseñal no deseada.
Carlos García Argos ([email protected]) 27

2.3. Parámetros para caracterizar un sistema no lineal 2. Distorsión no lineal y ruido
La componente a frecuenciaω1, dados dos tonos de entrada aω1 y ω2 es, recordando la ecuación2.5:
(aV1 +
3
2c
(V1V
22 +
1
2V 3
1
))cos ω1t
La componente a dicha frecuencia puede anularse si el tono a frecuenciaω2 tiene suficienteamplitud. Este caso es el que se conoce como bloqueo:
|aV1| =∣∣∣∣3
2c
(V1V
22 +
1
2V 3
1
)∣∣∣∣
Para evitar el bloqueo se puede hacer más selectiva la etapa de RF o bien mejorar la linealidaddel sistema.
Las señales moduladas en amplitud sufren más la distorsión que las modulaciones angulares.En las modulaciones de amplitud se da la modulación cruzada, que consiste en que un tonointerferente no se atenúa y puede pasar la información que transporta a otra portadora debido ala no idealidad del sistema.
Ejemplo 2.5A continuación se verá la caracterización de un sistema no lineal a modo de ejem-plo.
SNL3
1kΩ
vi 50Ω v0
Figura 2.9: Ejemplo de caracterización de un sistema no lineal
A la entrada del sistema se tienen dos tonos de−10 dBm. La potencia de salida es,en régimen lineal, dePo = 20 dBm, yIMR = 70 dB.
Se pide obtener los siguientes parámetros:
1. IIP
2. PC1dB
3. ParaV1 = 5 V , f1 = 10 MHz, V2 = 1 V y f2 = 11 MHz, las componentesfrecuenciales a la salida
4. Amplitudes de dichas componentes siP22 MHz = −16 dBm
5. Si sólo hubiera un tono a la entrada,V1, f1, calcular la distorsión armónicatotal si la carga no es sintonizada
6. Calcular el valor deV2 para que exista bloqueo
7. Calcular el margen dinámico siNo = −105 dBm ySFDM = 80 dB
28 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.3. Parámetros para caracterizar un sistema no lineal
1. IIP : se puede plantear de dos maneras. La primera es un poco más tediosa,se indica a continuación.
Pi = −10 dBm,Gps = Po( dBm)− Pin( dBm) = 30 dB
ComoGps = a2Rin/RL, siendoRin = 1 kΩ y RL = 50 Ω, entonces
30 = 10 logRin
RL
+ 20 log a ⇒ a = 7,071
La potencia de salida debida a la intermodulación de tercer orden queda
P03 = 10 log
(9
4c2R3
in
RL
P 3in
)= 3Pin + k k = 10 log
(9
4c2R3
in
RL
P 3in
)− 60
IMR(dB) = Po( dBm)− P03( dBm) = 70dB ⇒ P03( dBm) = −50 dBm
Entonces,
P03 = −50 dBm = 3(−10 dBm)+k ⇒ k = 10 log
(9
4c2R3
in
RL
P 3in
)−60 = −20 dBm
Tomando la raíz negativa,c = −0,0149
El punto de intersección de tercer orden se obtiene entonces como:
Pin = IIP ⇒ Po = P03 ⇒ Gps+IIP = k+3IIP ⇒ IIP =Gps − k
2= 25 dBm
La otra forma de hacerlo sería:
IMR = 2(OIP − Po) ⇒ 70 = 2(OIP − 20) ⇒ OIP = 55 dBm
OIP = Gps + IIP ⇒ IIP = OIP −Gps = 25 dBm
2. Punto de compresión a 1 dB:
La ganancia real es
G = Gps
(1 +
3c
2aRinPin
)2
Si Pin = PC1dB ⇒ G−Gps = −1 dB. Entonces,
−1 dB = 20 log
(1 +
3c
2aRinPin
)
⇒ Pin = PC1dB = 0,0344 W = 15,37 dBm
3. Componentes frecuenciales a la salida si a la entrada se tiene
V1 = 5 V, f1 = 10 MHz, V2 = 1 V, f2 = 11 MHz
Es un sistema de orden 3 donde hay:
Carlos García Argos ([email protected]) 29

2.3. Parámetros para caracterizar un sistema no lineal 2. Distorsión no lineal y ruido
Componente de continua. Armónicos fundamentales a10 MHz y 11 MHz. Productos de intermodulación de orden 2:1 MHz y 21 MHz. Armónicos de orden 2:20 MHz y 22 MHz. Armónicos de orden 3:30 MHz y 33 MHz. Productos de intermodulación de orden 3:31 MHz, 9 MHz, 32 MHz y
12 MHz.
4. Amplitudes de las anteriores componentes siP22 MHz = −16 dBmDel primer apartado, se tienea = 7,071 y c = −0,0149. El valor deb loextraemos del dato proporcionado, ya que el armónico de orden 2 es
b
2V 2
2 ⇒ P =
(b
2V 2
2
)21
2RL
=b2
4 · 100
P22 MHz = −16 dBm = 0,02512 W ⇒ b2 = 400P ⇒ b = 0,10024
Las amplitudes buscadas son las correspondientes a las combinaciones dea,b y c.
DC :b
2(V 2
1 + V 22 ) = 1,3 V
f1 : aV1 +3c
2
(V1V
22 +
V 31
2
)= 33,85 V
f2 : aV2 +3c
2
(V2V
21 +
V 32
2
)= 6,5 V
5. Distorsión armónica total si la carga no es sintonizada paraV1, f1:Si sólo hay un tono af1, a la salida se tiene:
a1 = aV1 +3
4c2V 3
1 = 33,95 V
a2 =b
2V 2
1 = 1,25 V
a3 =c
4V 3
1 = −0,465 V
Entonces, la distorsión es
DAT ≈√
a22 + a2
3
a1
= 3,93 %
6. V2 para que exista bloqueoCuando se produce bloqueo, el armónico fundamental es nulo, es decir, que
aV1 +3c
2
(V1V
22 +
V 31
2
)= 0
Por tanto,
|aV1| =∣∣∣∣3c
2
(V1V
22 +
V 31
2
)∣∣∣∣ ⇒ V2 = 17,07 V
30 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.4. El transistor bipolar como sistema no lineal
7. CalcularMD si No = −105 dBm ySFDM = 80 dB
El dato deSFDM = 80 dB es superfluo, ya que el margen dinámico es
MD = PC1dB −MDS
Se puede calcularMDS como
MDS = No −Gps = −135 dBm
y por tantoMD = 150,37 dB
¥
2.4. El transistor bipolar como sistema no lineal
En un transistor bipolar, existe la siguiente relación no lineal tensión-corriente:
iE = IES
(e
qkT
VBE(t) − 1)
SiendoIES la corriente inversa de saturación.
iBiC
iEvBE
(a) Transistor bipolar
vBE
iE
(b) Relación tensión-corriente deltransistor bipolar
Figura 2.10: El transistor bipolar como sistema no lineal
Relaciones:iC = iEα
donde
α =β
β + 1≈ 1
Si la excitación es sinusoidal,
vBE(t) = VDC + V cos ω0t
iE(t) ≈ IES eq
kTVDC e
qkT
V cos ω0t
Carlos García Argos ([email protected]) 31

2.4. El transistor bipolar como sistema no lineal 2. Distorsión no lineal y ruido
Definiendox = V/VT , y VT = kT/q ≈ 25 mV , la corriente de emisor es
iE(t) ≈ IES eVDC/VT ex cos ω0t
Utilizando las funciones de Bessel modificadas de primera especie y ordenn, la expresiónqueda:
iE(t) ≈ IES eVDC/VT
(I0(x) + 2
∞∑n=1
In(x) cos nω0t
)
iE(t)|ω0= 2IE
I1(x)
I0(x)cos ω0t
ComoiC = αiE,
iC(t)|ω0= 2IE
I1(x)
I0(x)cos ω0t
iC(t)|ωn= 2IE
In(x)
I0(x)cos nω0t
En la Figura 2.11 se representan las funciones de Bessel modificadas de primera especie y orden1 hasta3 conx = vBEq/kT (tensión base-emisor normalizada).
In(x)2I0(x)
y=
0,5 1,5 21 2,5 3
0,5
1
1,5
2
2,5
3
x
n=2
n=3
n=1
y=x
Figura 2.11: Funciones de Bessel modificadas de primera especie normalizadas aI0(x) y enescala logarítmica
El límite de la zona de funcionamiento lineal está enx = 1, que se corresponde conV =25 mV .
En gran señal la corriente de emisor depende de la señal de entrada:
IE = IES eVDC/VT I0(x)
32 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.5. Superheterodino: el problema de los espúreos
Se supondráVDC ≈ 750 mV en Silicio.
De cara a calcular la distorsión armónica, la amplitud de los armónicos se puede expresar como
an = 2IEIn(x)
I0(x)
Ejemplo 2.6Buscamos calcular la distorsión armónica total para una resistencia conectada alcolector y conx = 0,5.
En ese caso, esV = 12,5 mV , por lo que
D2 =a2
a1
= 12 %
Se trata de una distorsión bastante elevada. ¥
Ejemplo 2.7Si se tiene un circuito sintonizado en colector, como el de la Figura 2.12, la DATdependerá delQ del tanque RCL.
vBE
v0
Figura 2.12: Circuito sintonizado en colector
Si la carga es resistiva,DAT = f(an).
Si tenemos el paralelo RCL,DAT = f(an, Q), donde si aumentaQ, disminuye ladistorsión total.
Esto se observa en la Figura 2.13.
¥
2.5. Superheterodino: el problema de los espúreos
Se define un espúreo como una señal no deseada, que si alcanzase el mezclador, produciría fre-cuencia intermedia al batirse con el oscilador local, debido a los productos de intermodulación.
Frecuencias espúreas son aquellas frecuencias a las que se pueden producir espúreos.
Suposiciones:
Carlos García Argos ([email protected]) 33

2.5. Superheterodino: el problema de los espúreos 2. Distorsión no lineal y ruido
x (normalizada)0,5 1,5 2,5
60
50
40
30
20
10
321
Q=0 (sólo R)
Q=1
Q=20Q=30
DAT (%)
Figura 2.13: Distorsión armónica total en un tanque RCL para un transistor bipolar
La etapa de radiofrecuencia es ideal, siendo la potencia de las señales de RF limitada.
El oscilador local es ideal, es decir, se produce un tono puro.
Las no linealidades que introducen el mezclador son los productos de intermodulación:
PIM → mOL + nRF = FI m, n ∈ Z, m + n ≤ npolinomio
El producto deseado es un PIM de orden 2,
PIM2 = OL−RF = FI
En general, se tienen en cuenta los productos hastam + n = 6.
Ejemplo 2.8Si tenemos una señal deseada aRF = 100 MHz, OL = 110 MHz, esFI =OL−RF = 10 MHz.
Los productos de intermodulación que pueden aparecer son:
Orden 2:
FE −OL = FI ⇒ FE = 120 MHz (frecuencia imagen)
34 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.5. Superheterodino: el problema de los espúreos
Orden 3:
2FE + OL = FI ⇒ FE = 60 MHz
−2FE + OL = FI ⇒ FE = 50 MHz
FE − 2OL = FI ⇒ FE = 230 MHz
−FE + 2OL = FI ⇒ FE = 210 MHz
Si en la antena apareciesen señales a esas frecuencias, pasan aFI tras la mezcla.
La solución pasa bien por hacer mejor el mezclador (de orden 2 ideal) o bien porhacer más selectiva la etapa de radiofrecuencia.
El caso más problemático se produce con la frecuencia imagen, ya que sufre lamisma atenuación que la frecuencia deseada. Ambas se generan por producto deintermodulación del mismo orden (2). ¥
Existen dos tipos de espúreos:
Espúreos por coincidencia: la propia señal deseada es espúreo de sí misma.
OL−RFD = FI
mOL + nRFD = FI
mRFD + mFI + nRFD = FI
RFD =FI(1−m)
m + n
Ejemplo 2.9
FI = 10 MHz
n = 2, m = −1
RFD =FI(1 + 1)
2− 1= 2FI = 20 MHz, OL = 30 MHz
La señal de20 MHz es deseada, y espúrea debido al producto de intermodu-lación de orden 3.
Solución: alejar más la frecuencia intermedia. ¥
Espúreos por congruencia: son ajenos a la señal deseada, por ejemplo la frecuencia ima-gen.
mOL + nFE = FI
La carta de espúreos es una representación de las distintas frecuencias espúreas que aparecenpara cada entrada.
Carlos García Argos ([email protected]) 35

2.5. Superheterodino: el problema de los espúreos 2. Distorsión no lineal y ruido
Al realizar la carta de espúreos, en el eje horizontal se representa la frecuencia deseada normal-izada a la intermedia,RFD/FI, y en el vertical la frecuencia interferente normalizada aFI,FE/FI. Es decir, que si las rectas que se representan son
OL−RFD = FI
mRFD + nFE = (1−m)FI
La ecuación de las rectas es
mx + ny = 1−m ⇒ y = −m
nx +
1−m
n
En la Figura 2.14 se puede ver un ejemplo de la carta de espúreos hasta orden 6. No se handibujado las respuestas de(0, 3) y (0, 5), que se encuentran entre(0, 2) y (0, 4) la primera yentre(0, 4) y el eje horizontal la segunda.
Señal
dese
ada (
1,1)
0
1
2
3
4
5
6
7
1 2 3 4 5 6 7
(0,2)
(0,4)
(2,2)
(3,3)
(3,3)
(5,1
)(4
,1)
(5,1
)(4
,1)(3,1
) (3,1
)
(3,2
)
(2,1
)
(4,2
)
(2,1
)
(4,2
)
(3,2
)
(1,1)
(2,2)
(2,4)
(2,3)
(2,3)
(1,2)
(1,2)
(2,4)
(1,3)
(1,5)(0,1)
(1,3)
(1,4)
(1,4)(1,5)
Figura 2.14: Ejemplo de carta de espúreos hasta orden 6, con(m,n) los órdenes de señal inter-ferente (m) y oscilador local (n)
Las respuestas(0, x) son los subarmónicos de la frecuencia intermedia, las de(1, x) son lossubarmónicos deRF y (1, 1) es la mezcla de la frecuencia deseada y la imagen con el osciladorlocal.
36 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.6. Tipos y fuentes de ruido
2.6. Tipos y fuentes de ruido
2.6.1. Introducción
El ruido es una señal aleatoria, de potencia, es decir, que se le caracteriza por su densidadespectral de potencia.
xn(t) −→ x2n(t) =
∫ ∞
0
Wx(f)df
x2n(t) es el valor cuadrático medio de la señal de ruido.
Wx(f) es la densidad espectral de potencia de la señal de ruido, enW/Hz.
La señal es unilateral (integral en el eje real positivo), es decir, que sólo se tiene en cuentael ancho de banda positivo.
Al pasar por un sistema lineal con respuesta en frecuenciaH(f),
Wy(f) = |H(f)|2 Wx(f) ⇒ y2n(t) =
∫ ∞
0
Wy(f)df
Si se considera el ruido interno del sistema,Ws(f), el ruido total a la salida es
Wo(f) = Wy(f) + Ws(f)
y2o(t) =
∫ ∞
0
Wo(f)df
2.6.2. Ruido en una resistencia
Si se aplica una señal de ruido sobre una resistencia de valorR, la potencia de ruido generadaes
N =v2
n(t)
4R
xn(t) R
Figura 2.15: Ruido en una resistencia
Carlos García Argos ([email protected]) 37
2.6. Tipos y fuentes de ruido 2. Distorsión no lineal y ruido
Esta potencia de ruido se define como
N =
∫ ∞
0
G(f)Wv(f)df =
∫ ∞
0
R(f)Wi(f)df
Siendo:
G(f): conductancia en función de la frecuencia.
R(f): resistencia en función de la frecuencia.
Wv(f): densidad espectral de tensión enV 2/Hz.
Wi(f): densidad espectral de corriente enA2/Hz.
Si la resistencia esR = 1 Ω, entoncesWv(f) = Wi(f).
2.6.3. Fuentes de ruido en radiocomunicación
Ruido externo: es importante sobre todo a baja frecuencia.
Ruido atmosférico.
Ruido espacial.
Ruido artificial.
Ruido interno:
Ruido térmico: aparece en resistencias óhmicas.
Wv(f) =4hfR(f)
ehf/kT − 1
Dondek = 1,38×10−23 J/K es la constante de Boltzman yh = 6,6261×10−34 J ·sla constante de Planck. Sif < 1200 GHz, lo cual es el caso habitual, entonces sepuede aproximar por
Wv(f) = 4kTR(f)
Y si R(f) = R, es decir, que la resistencia es constante con la frecuencia, y siendoB el ancho de banda de funcionamiento,
v2n(t) =
∫
(B)
4kTR(f)df ≈ 4kTBR
Si se tiene una impedancia compleja,Z(f) = R(f)+ jX(f), el valor RMS (eficaz)de la señal de ruido es √
v2n(t) =
√4kTBR
En la Figura 2.16
38 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.6. Tipos y fuentes de ruido
vg
Zg
vg
vn (RMS)
gZ (ideal)
Figura 2.16: Ruido en una impedancia compleja y modelado
Potencia disponible de señal con adaptación:
PD|señal=|vg|2
8<e Zg
Potencia disponible de ruido con adaptación:
PD|ruido = ND =v2
n
4<e Zg
Ruido shot (o ruido cuántico): aparece cuando una corriente atraviesa una barrerade potencial. Se da por tanto en uniones de semiconductores, esto es, en dispositivosactivos.
Wi(f) = 2qIDC
Siendo
IDC : corriente en continua que circula por la barrera de potencial.
q: carga del electrón.
Es ruido blanco con distribución de Poisson.
En la Figura 2.17 se puede ver cómo modelar el ruido shot en un diodo semicon-ductor, con un generador de corriente de ruido en paralelo con un diodo ideal.
indiodoideal
Figura 2.17: Modelo de ruido shot para un diodo
Ruido flicker: aparece en semiconductores, por no idealidades en los contactos, im-purezas en la estructura, etc. Su densidad espectral de potencia es inversamente pro-porcional a la frecuencia, por lo que es importante a baja frecuencia. En la Figura2.18 se puede ver esta relación DEP-frecuencia.
Si la frecuencia de funcionamiento es superior a1 MHz, sólo se consideran el ruidotérmico y el shot.
Carlos García Argos ([email protected]) 39

2.6. Tipos y fuentes de ruido 2. Distorsión no lineal y ruido
Wv
1 MHz f
Figura 2.18: Densidad espectral de potencia del ruido flicker
2.6.4. Ancho de banda equivalente de ruido
El ancho de banda equivalente de ruido se define como el ancho de banda del circuito si tuvierauna respuesta plana, para el valor máximo del circuito original:
BN =1
|H(fo)|2∫ ∞
0
|H(f)|2 df
H(f)| | 2
f0
f
H(f)| | 2
f0
| H(f0) | 2
BN
f
misma área
Figura 2.19: Ancho de banda equivalente de ruido
2.6.5. Ruido generado por un transistor bipolar en configuración de emisorcomún
En la Figura 2.20(a) se puede ver la configuración de emisor común para un transistor bipolar,mientras que en la Figura 2.20(b) está el modelado de pequeña señal con los generadores deruido, suponiendo queR1 y R2 son suficientemente elevadas para despreciarlas.
En este esquema se han incluido las resistencias parásitas del transistor tanto de entrada,rπ,como de salida,Ro. Esta última limita la potencia disponible a la salida.
En el caso de queRo sea mucho mayor queRo se puede aproximar por un circuito abierto.
40 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.6. Tipos y fuentes de ruido
vg
Rg
R1
R2
RL
RE
(a) Transistor bipolar en configuraciónde emisor común
vg
Rg
RL
vng
rπ
inbinc
gmvbe R0v0
(b) Modelo de pequeña señal para un transistor en emisor común
Figura 2.20: Modelado del ruido generado por un transistor bipolar en emisor común
1. Ruido disponible a la entrada:
Ni =4kT0BRg
4Rg
⇒ Ni = kT0B
2. Ganancia de potencia disponible del circuito: definiendo en primer lugar las potenciasdisponibles a la entrada y a la salida del circuito, y la tensión de salida,
Pdi =v2
g
8Rg
Pdo =v2
o
8Ro
vo = −gmvbeRo = −gmRorπ
Rg + rπ
vg
Queda entonces la ganancia,
GD =Pdo
Pdi
=Rg
(gmRo
rπ
Rg+rπ
)2
Ro
=g2
mRgRor2π
(rπ + Rg)2
Y comoβ = gmrπ,
GD =β2RgRo
(rπ + Rg)2
3. Potencia de ruido disponible debida al amplificador:
Para la fuenteinb:
i2nb = 2qIBB IB =VT
rπ
=kT0
qrπ
=⇒ i2nb =2kT0B
rπ
Carlos García Argos ([email protected]) 41

2.6. Tipos y fuentes de ruido 2. Distorsión no lineal y ruido
vcnb= −gmvbeRo = −gmRoinb(rπ||Rg) = −gmRoinb
rπRg
rπ + Rg
Ndo|inb =v2
cnb
4Ro
=g2
mr2πR2
gRo
4(rπ + Rg)2i2nb =
g2mrπR2
gRo
2(rπ + Rg)2kT0B
Para la fuenteinc:
i2nc = 2qICB IC =VT
re
= gmVT = gmkT0
q=⇒ i2nc = 2kT0Bgm
vcnc = incRo =√
2kT0BgmRo
Ndo|inc=
v2cnc
4Ro
=Ro
4i2nc =
Rogm
2kT0B
Por superposición de ambas fuentes:
NDo,amp =g2
mr2πR2
gRo
4(rπ + Rg)2i2nb +
Ro
4i2nc
4. Potencia disponible de ruido a la entrada, debido al amplificador:
NDi,amp =NDo,amp
GD
= kT0BRg
rπ
+ kT0B(rπ + Rg)
2
2gmr2πRg
5. Factor de ruido:
F =No
NiGD
=NiGD + Ninterno
NiGD
=Ni + Namp/GD
Ni
conNi = kT0B,Namp
GD
= NDi,amp
F =NDi,amp+ kT0B
kT0B
Del término deNDi,amp, se tiene
r2π + 2rπRg + R2
g
2Gmr2πRg
=1
2gmRg
+1
gmrπ
+Rg
2gmr2π
Entonces, la expresión para el factor de ruido queda
F = 1 +1
gmrπ
+ Rg
(1 + rπgm
2gmr2π
)+
1
Rg
1
2gm
Si β = gmrπ À 1, se simplifica a
F = 1 +1
gmrπ
+ Rg1
2rπ
+1
Rg
1
2gm
42 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.6. Tipos y fuentes de ruido
6. Se observa que el factor de ruido depende deRg, lo que permite minimizar el factor deruido en función deRg:
∂F
∂Rg
= 0 ⇒ Rgopt =rπ√
1 + rπgm
Para esa resistencia de generador, el factor de ruido es
Fmin =rπ
gmR2gopt
+1
gmRgopt
Y si β À 1, entonces estos valores se pueden simplificar a
Rgopt ≈√
rπ
gm
Fmin ≈ 1 +1
gmRgopt
El factor de ruido también depende degm y rπ, por lo que depende de la polarizacióndel transistor. Esto permite optimizar el ruido del amplificador tanto conRg como con lacorriente de polarización,IC .
2.6.6. Ruido generado por un circuito integrado
En la Figura 2.21 se representa el modelo de ruido a la entrada de un bipuerto, que puede serpor ejemplo un amplificador.
Para ese modelado se precisan dos generadores, uno de tensión y otro de corriente, ya que elruido existe también con la entrada cortocircuitada y en circuito abierto.
e2n = 4kT0BRn i2n = 4kT0BGn
DondeRn es la resistencia equivalente de ruido, yGn 6= 1/Rn.
vg
Zg en=vnvgn
sistemasin ruidoin
Figura 2.21: Modelo de ruido para un circuito bipuerto
El factor de ruido en el circuito bipuerto se define como el cociente entre el ruido total a lasalida y el ruido a la salida provocado por la impedancia de generador:
F =NDo
NDo|Zg
Carlos García Argos ([email protected]) 43

2.6. Tipos y fuentes de ruido 2. Distorsión no lineal y ruido
Dado que la relación entrada-salida es simplemente una ganancia, podemos referir ambos ruidosa la entrada. El ruido total resulta de la superposición de los 3 generadores,vgn, en y in:
NDo =(4kT0BRg + e2
n + |Zgin|2) 1
4<e(Zg)=
=(4kT0BRg + e2
n + (R2g + X2
g )i2n) 1
4Rg
Entonces, el factor de ruido lo podemos expresar como
F =NDo
NDo|Zg
=NDo
kT0B=
4kT0BRg + e2n + (R2
g + X2g )i2n
4kT0BRg
=
= 1 +e2
n + (R2g + X2
g )i2n4kT0BRg
F = 1 +1
4kT0B
(e2
n
1
Rg
+ i2nR2
g + X2g
Rg
)
Se observa que para reducir el ruido interesa queXg sea nulo. En ese caso, el factor de ruido es
F = 1 +1
4kT0B
(e2
n
Rg
+ i2nRg
)
Si se minimiza el ruido, obtenemos la impedancia de generador óptima:
∂F
∂Rg
= 0 ⇒ Rgopt =en
in⇒ Fmin = 1 +
e2n
2kT0BRgopt
Otra expresión es
Rgopt =Rn
Gn
⇒ Fmin = 1 + 2√
RnGn
Ejemplo 2.10Seguimos la respuesta en frecuencia representada en la Figura 2.22. Paraf =500 MHz,
e′n =1 nV√
Hzi′n =
70 pA√Hz
Es un sistema de banda estrecha, con curvas aproximadamente planas en la bandade funcionamiento.
e2n = (e′n)2B i2n = (i′n)2B
El objetivo es calcularRgopt y el factor de ruido mínimo.
La impedancia de generador óptima es
Rgopt =en
in=
e′n√
B
i′n√
B=
e′ni′n
=10−9
70 · 10−12= 14,28 Ω
44 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.6. Tipos y fuentes de ruido
e’n (V/ Hz) i’n (A/ Hz)
f500 MHz
Figura 2.22: Respuesta en frecuencia de los generadores de ruido para el ejemplo
La resistencia equivalente de ruido es
Rn =e2
n
4kT0B=
(10−9)2B
4kT0B= 62,4 Ω
Y la conductancia equivalente de ruido
Gn =i2nB
4kT0B=
(70 · 10−12)2
4kT0
= 0,3 f
Entonces, el mínimo factor de ruido es
Fmin = 1 + 2√
RnGn = 9,74
La figura de ruido mínima es
NFmin = 9,9 dB
¥
2.6.7. Caso general
Vemos un ejemplo de adaptación con transformador, como el representado en la Figura 2.23(a).Si se reflejan los componentes, se tiene el sistema de la Figura 2.23(b).
Se buscan2Zg óptimo, es decir,n óptimo.
n2optZg → n2
optRg = Rgopt =en
in
nopt =
√en
inRg
Esto es si se adapta para mínimo ruido, no para máxima transferencia de potencia, ya que soncosas diferentes.
Carlos García Argos ([email protected]) 45

2.6. Tipos y fuentes de ruido 2. Distorsión no lineal y ruido
sistemasin ruidoin
en
Zg
vg
1:n
(a) Adaptación a la entrada con transformador
sistemasin ruidoin
en
n2Zg
nvg
nvgn
(b) Modelo de ruido reflejando en el secundario del transformador
Figura 2.23: Modelado de ruido para adaptación a la entrada con transformador
2.6.8. Comparación entre amplificador discreto e integrado
Para un amplificador discreto,
F ≈ 1 +1
rπgm︸ ︷︷ ︸≈0
+Rg1
2rπ
+1
Rg
1
2gm
Para un amplificador integrado,
F ≈ 1 +e2
n
4kT0B
1
Rg
+i2n
4kT0BRg
Igualando ambas ecuaciones, se obtienen las siguientes expresiones, que permiten estudiar unamplificador discreto como si fuera uno integrado:
e2n
4kT0B=
1
2gm
i2n4kT0B
=1
2rπ
⇒
e2n =
4kT0B
2gm
i2n =4kT0B
2rπ
2.6.9. Comportamiento del factor de ruido segúnRg e IC
Falta ver el mínimo factor de ruido en función de la polarización.
46 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.7. Fases en el diseño de amplificadores de radiofrecuencia para mínimo ruido
Si β À 1,
F ≈ 1 + Rg1
2rπ
+1
Rg
1
2gm
Siendo
rπ =VT
IB
=VT β
IC
gm =IC
VT
entonces, la expresión queda
F ≈ 1 + RgIC1
2βVT
+1
RgIC
VT
2
(1− F )RgIC + (RgIC)2 1
2βVT
+VT
2= 0
La familia de curvas que se obtiene es
(RgIC)2 + RgIC2βVT (1− F ) + βV 2T = 0
La Figura 2.24 muestra las hipérbolas con parámetroF que representan la expresión anterior.En los catálogos pueden aparecer estas curvas o tablas.
IC
Rg
valor de F óptimo
Figura 2.24: Curvas deF en función deRg e IC
También pueden darse curvas de figura de ruido constante, que en general son elipses y depen-den de la frecuencia.
2.7. Fases en el diseño de amplificadores de radiofrecuenciapara mínimo ruido
2.7.1. Amplificador integrado
Dado un amplificador con sus curvas dee′n e i′n, en primer lugar se mira si son constantes en labanda de uso.
Si no lo son, se integran en dicha banda, y si lo son, se multiplican por el ancho de banda, paraobteneren e in.
Carlos García Argos ([email protected]) 47

2.7. Fases en el diseño de amplificadores de radiofrecuencia para mínimo ruido 2. Distorsión no lineal y ruido
Entonces, se calcula el factor de ruido óptimo para obtener una relación señal a ruido óptima.Esto dará una resistencia de generador óptima, por lo que habrá que adaptar la entrada delcircuito, por ejemplo, con un transformador que tenganopt.
2.7.2. Amplificador discreto
Existen dos opciones de cara al diseño:
Usar las curvas de ruido y buscarFopt. Entonces, se calculaRgopt.
Usar las curvas deF en función deIC y Rg, buscandoRgopt.
A partir de la resistencia óptima, diseñar la red de adaptación, y a partir de laIC obtenida,diseñar la red de polarización.
2.7.3. Antena a la entrada
(superheterodino)etapa de RF
kTAB
NDi
Figura 2.25: Esquema de ruido para un sistema con una antena a la entrada
Si a la entrada hay una antena, se trata como si fuera el generador. ATA se le llama temperaturade antena, y representa el ruido de una antena, que eskTAB.
La potencia disponible de ruido a la entrada de la etapa de RF para una carga resistiva es
NDi =v2
n
4R=
4kT0BR
4R= kT0B
Si Namp es el ruido generado por el amplificador,
F =NDo
NDo|procedente dela entrada
=Namp+ NDiGD
NDiGD
= 1 +Namp
NDiGD
= 1 +Nint
NDi
= 1 +Nint
kT0B
DondeNint = Namp/GD.
F = 1 +Nint
kT0B−→ Nint = (F − 1)kT0B
Considerando la temperatura de antena, la potencia disponible de ruido a la entrada es
NDi = kTAB + (F − 1)kT0B
48 Carlos García Argos ([email protected])

2. Distorsión no lineal y ruido 2.7. Fases en el diseño de amplificadores de radiofrecuencia para mínimo ruido
La relación señal a ruido a la salida es
(S/N)o = (S/N)o|referida ala entrada
=Si
kTAB + (F − 1)kT0B=
Si
kTAB + kTeB
SiendoTe = (F − 1)T0 es la temperatura equivalente de ruido del sistema, el ruido interno esentonces
Nint = kTeB
(S/N)o =Si
kTAB + kTeB
Ejemplo 2.11Se busca diseñar un amplificador conBN = 100 kHz en la frecuencia centralf0 =50 MHz. Para ello, se usa un amplificador integrado con las curvas dee′n y i′n de laFigura 2.26.
e’n i’n
pA/ Hz10
nV/ Hz5
50 MHzf
Figura 2.26: Curvas de los generadores de ruido para un amplificador integrado
1. Diseñar el amplificador para relación señal a ruido de salida máxima si elgenerador tieneRg = 50 Ω.
max(S/N) ≡ mın(F )
F = 1 +1
4kT0B
(e2
n
Rg
+ i2nRg
)
MinimizandoF ,
Rgoptima =en
in=
e′n√
B
i′n√
B=
e′ni′n
= 500 Ω
Dado queRg = 50 Ω, si se usa un transformador para la red de adaptación, larelación de transformación debe ser
n2 =Rgopt
Rg
=500
50= 10 ⇒ n =
√10
Carlos García Argos ([email protected]) 49

2.7. Fases en el diseño de amplificadores de radiofrecuencia para mínimo ruido 2. Distorsión no lineal y ruido
2. Calcular el factor de ruido y la relación señal a ruido de salida sivg = 3,4 µV .
F = Fopt = 1 +e′ni
′n
2kT0
= 7,24
Se calcula el ruido disponible a la entrada:
F = 1 +Nint
kT0B⇒ NDi = kT0B + Nint = FkT0B
La potencia de señal es, con el dato proporcionado:
Si =v2
g
8Rg
=1,16 · 10−11
400= 2,899 · 10−14 W
Finalmente, la relación señal a ruido a la salida coincide con la de entrada sise referencian las fuentes a la entrada:
(S/N)o = (S/N)i =Si
FkT0B= 10 W/W = 10 dB
3. Se tiene a la entrada una antena conTA = 23 K y RA = 50 Ω. Se pide calcularvA necesaria para obtener una relación señal a ruido de salida de10 dB.Dado queRA = Rg, el factor de ruido se mantiene igual que antes. Entonces,el ruido disponible a la entrada es
NDi = kTAB + (F − 1)kT0B = kB(TA + (F − 1)T0)
La temperatura del sistema es
Tsist = TA + (F − 1)T0 = 1832,6 K
Para obtener la relación señal a ruido pedida, la potencia de señal a la entradadebe ser
SDi = 10NDi =v2
A
8Rg
⇒ vA = 3,18 µV
Como la temperatura de antena es mucho menor que la de referencia, no au-menta en exceso el nivel de ruido por incluir la antena, ya que predomina elruido interno.
4. Volver a calcularn y SNRo paraRg = 10 Ω.La resistencia de generador óptima es la misma que antes, pero la relación detransformación varía:
n =√
50
El factor de ruido también sigue siendoF = 7,24, pero al variar la resistenciade generador referida a la entrada,
SNRo =v2
g/8Rg
FkT0B= 50 W/W = 17 dB
Es el mismo sistema con el mismo generador, con el mismo ruido. Sin embar-go, al ser inferior la resistencia de generador, aumenta la potencia que se tienea la entrada, por lo que la relación señal a ruido aumenta.
¥
50 Carlos García Argos ([email protected])