chapters 2/3: 1d/2d kinematics - national maglabfs.magnet.fsu.edu/~shill/teaching/2048...
TRANSCRIPT
Chapters 2/3: 1D/2D Kinematics Thursday January 15th
Reading: up to page 36 in the text book (Ch. 3)
• Review: Motion in a straight line (1D Kinematics) • Review: Constant acceleration – a special case • Chapter 3: Vectors
• Properties of vectors • Unit vectors • Position and displacement • Velocity and acceleration vectors
• Constant acceleration in 2D and 3D • Projectile motion (next week)
Summarizing
Average velocity: 2 1
2 1avg
x xxv vt t t
−Δ= = =Δ −total distance
avgs st
= =Δ
local slope of versus graphdxv x tdt
= =
Displacement: Δx = x2 - x1
Instantaneous velocity:
Average speed:
Instantaneous speed: magnitude of v
Summarizing
Average acceleration:
Instantaneous acceleration:
In addition:
2 1
2 1avg
v vva at t t
−Δ= = =Δ −
= local slope of versus graphdva v tdt
=
2
2 =curvature of versus graphd dx d xa x tdt dt dt⎛ ⎞= =⎜ ⎟⎝ ⎠
SI units for a are m/s2 or m.s-2
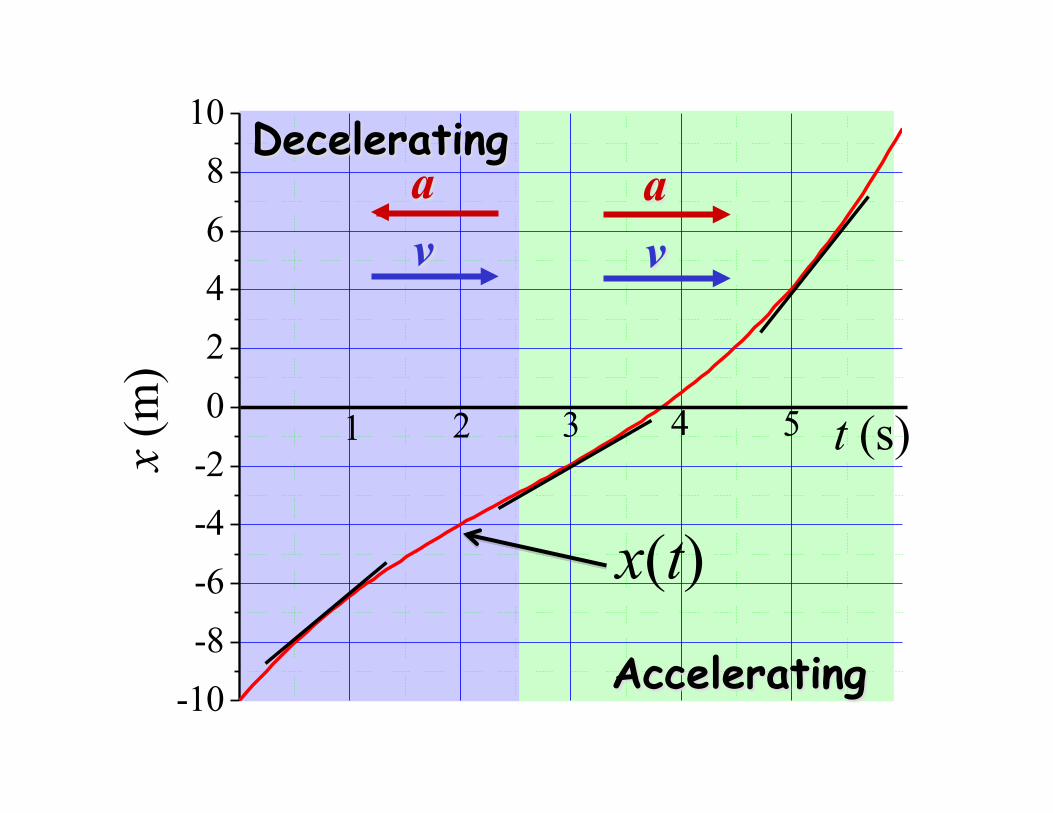
-10-8-6-4-202468
10
t (s)54321x (m
)
Accelerating
a v
Decelerating a v
x(t)
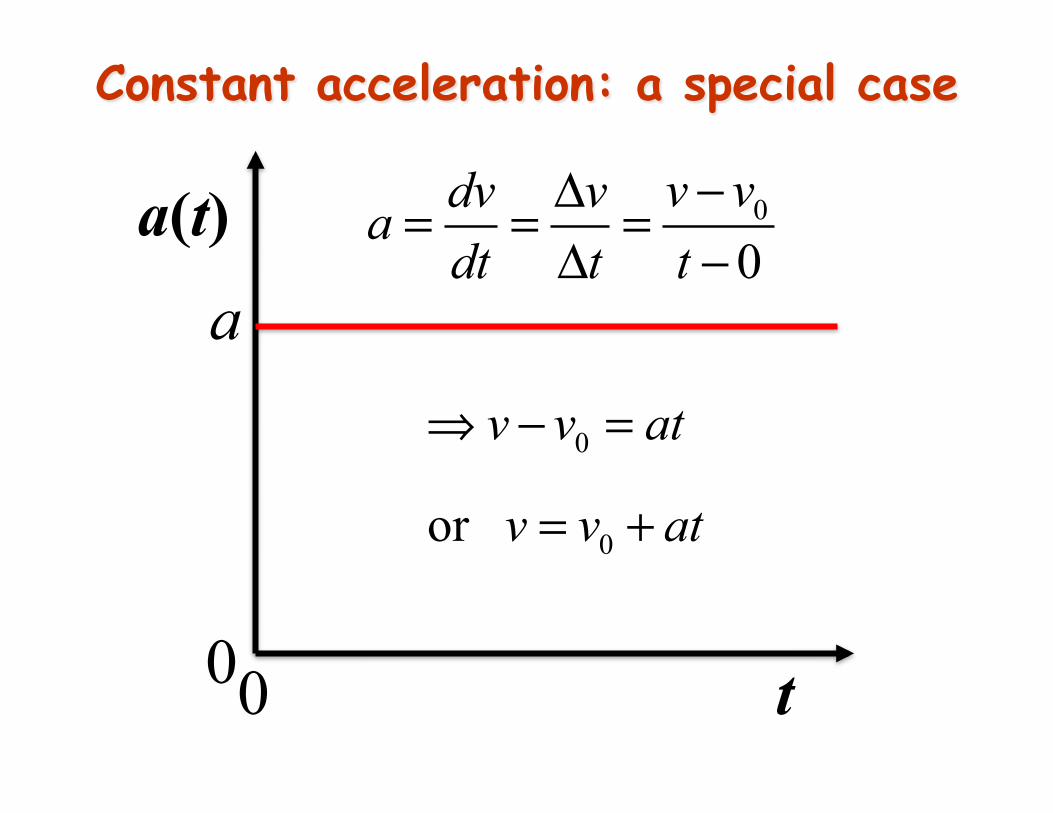
Constant acceleration: a special case
a(t)
t
0
0v vdv va
dt t t−Δ= = =
Δ −a
0
0or
v v at
v v at
⇒ − =
= +
0 0
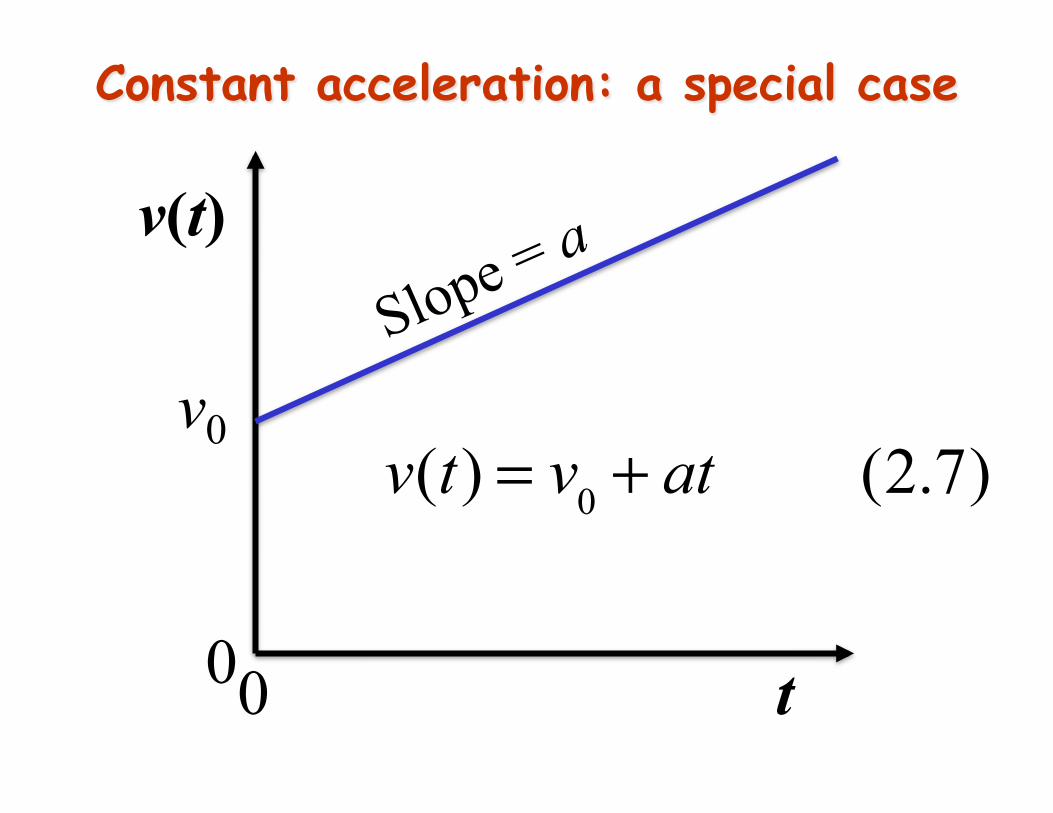
v(t) = v0 + at (2.7)
Constant acceleration: a special case
v(t)
t
v0
0 0
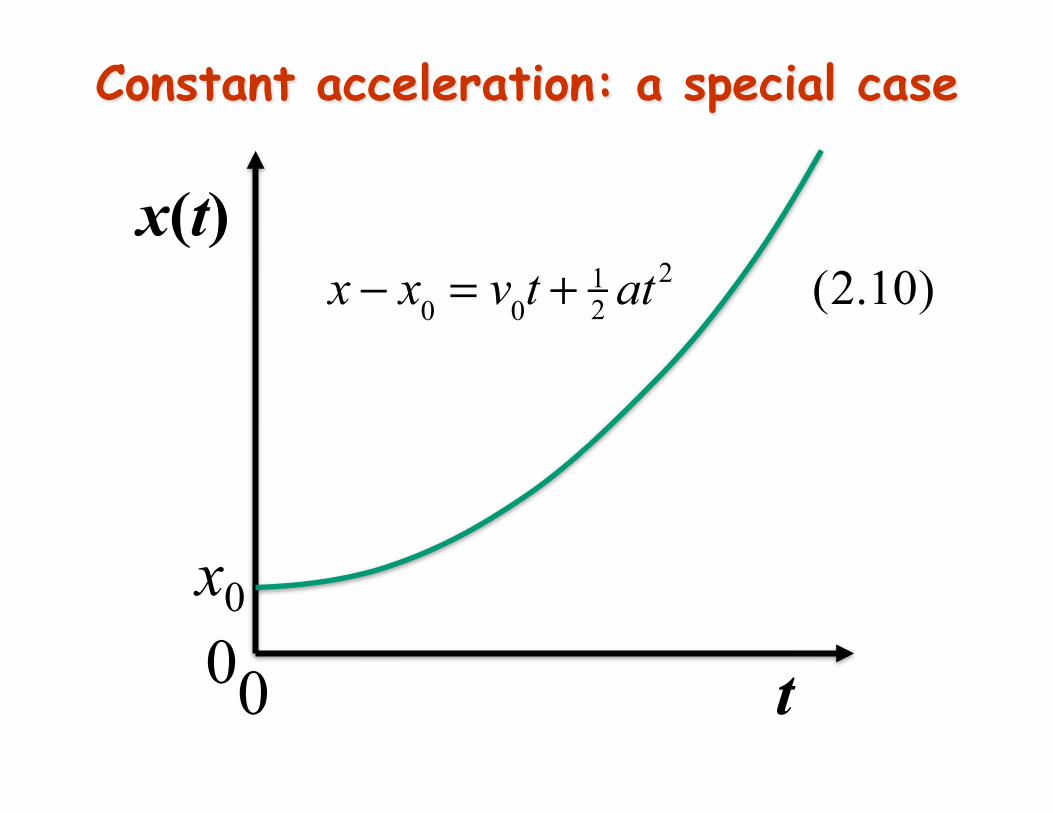
Constant acceleration: a special case
x(t)
t 0 0
x − x0 = v0t +12 at2 (2.10)
x0
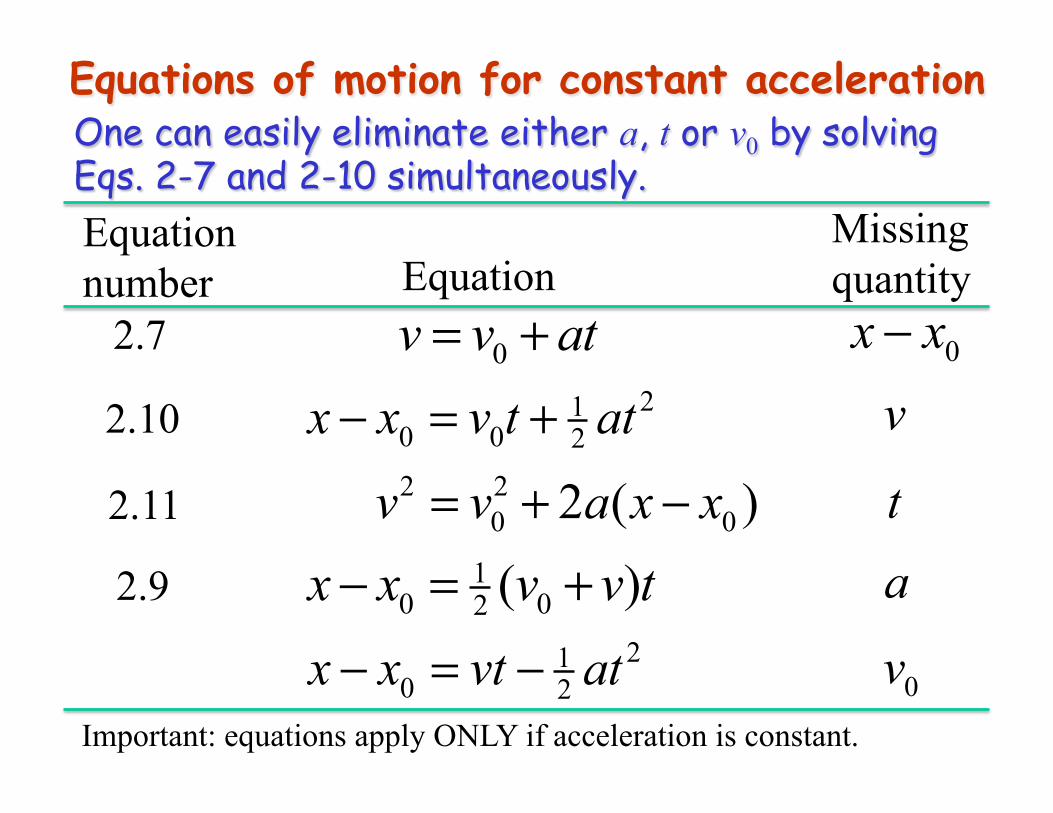
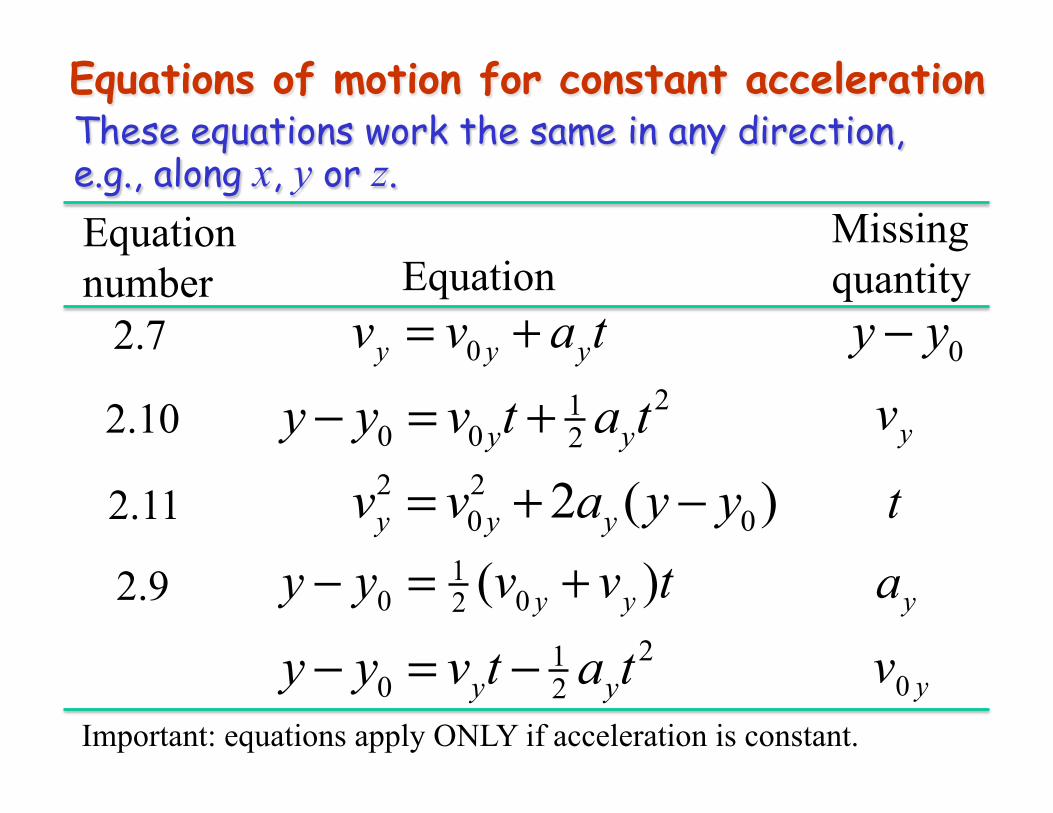
Equations of motion for constant acceleration
210 0 2x x v t at− = +
0v v at= +
2 20 02 ( )v v a x x= + −1
0 02 ( )x x v v t− = +21
0 2x x vt at− = −
0x x−v
ta
0v
Equation Missing quantity
Equation number
2.7
2.10
2.11
2.9
One can easily eliminate either a, t or v0 by solving Eqs. 2-7 and 2-10 simultaneously.
Important: equations apply ONLY if acceleration is constant.
Equations of motion for constant acceleration
210 0 2y yy y v t a t− = +
0y y yv v a t= +
2 20 02 ( )y y yv v a y y= + −1
0 02 ( )y yy y v v t− = +21
0 2y yy y v t a t− = −
0y y−
yv
t
ya
0 yv
Equation Missing quantity
Equation number
2.7
2.10
2.11
2.9
These equations work the same in any direction, e.g., along x, y or z.
Important: equations apply ONLY if acceleration is constant.

Equations of motion for constant acceleration
y − y0 = v0 yt − 1
2 gt2 vy = v0 y − gt
vy
2 = v0 y2 − 2g( y − y0 )1
0 02 ( )y yy y v v t− = +
y − y0 = vyt + 1
2 gt2
0y y−
yv
t
ya
0 yv
Equation Missing quantity
Equation number
Special case of free-fall under gravity, ay = -g. g = 9.81 m/s2 here at the surface of the earth.
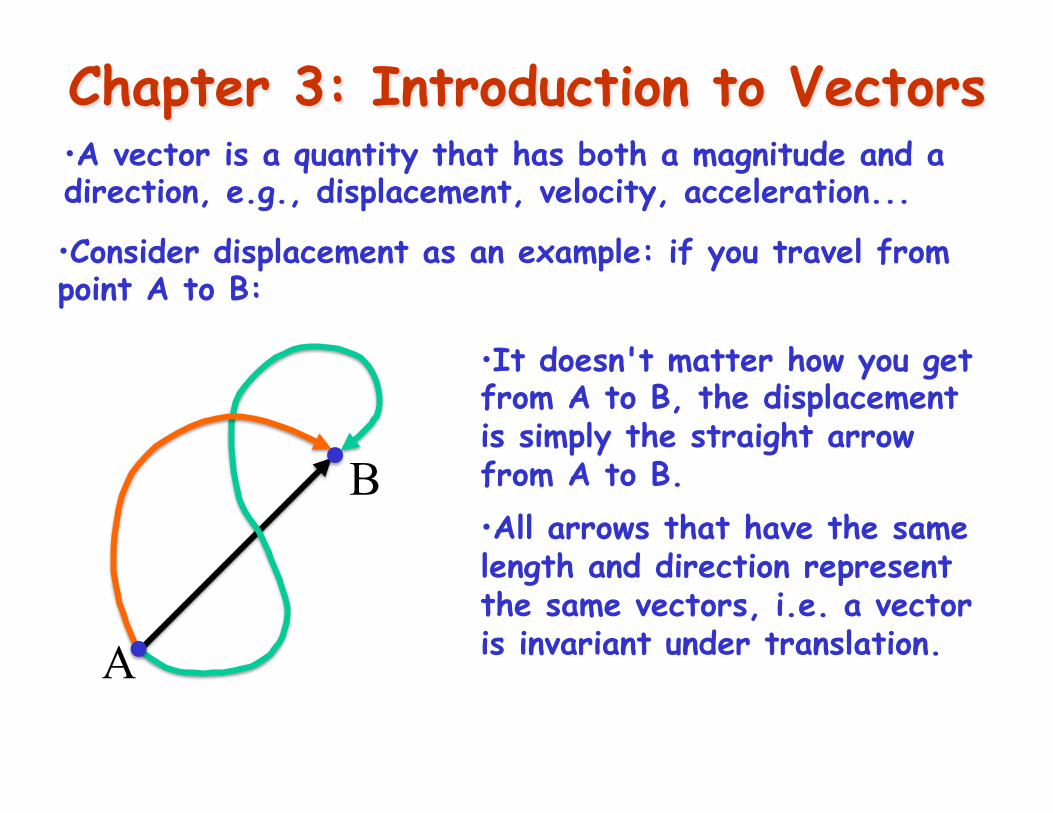
Chapter 3: Introduction to Vectors
• Consider displacement as an example: if you travel from point A to B:
• It doesn't matter how you get from A to B, the displacement is simply the straight arrow from A to B. • All arrows that have the same length and direction represent the same vectors, i.e. a vector is invariant under translation.
• A vector is a quantity that has both a magnitude and a direction, e.g., displacement, velocity, acceleration...
A
B
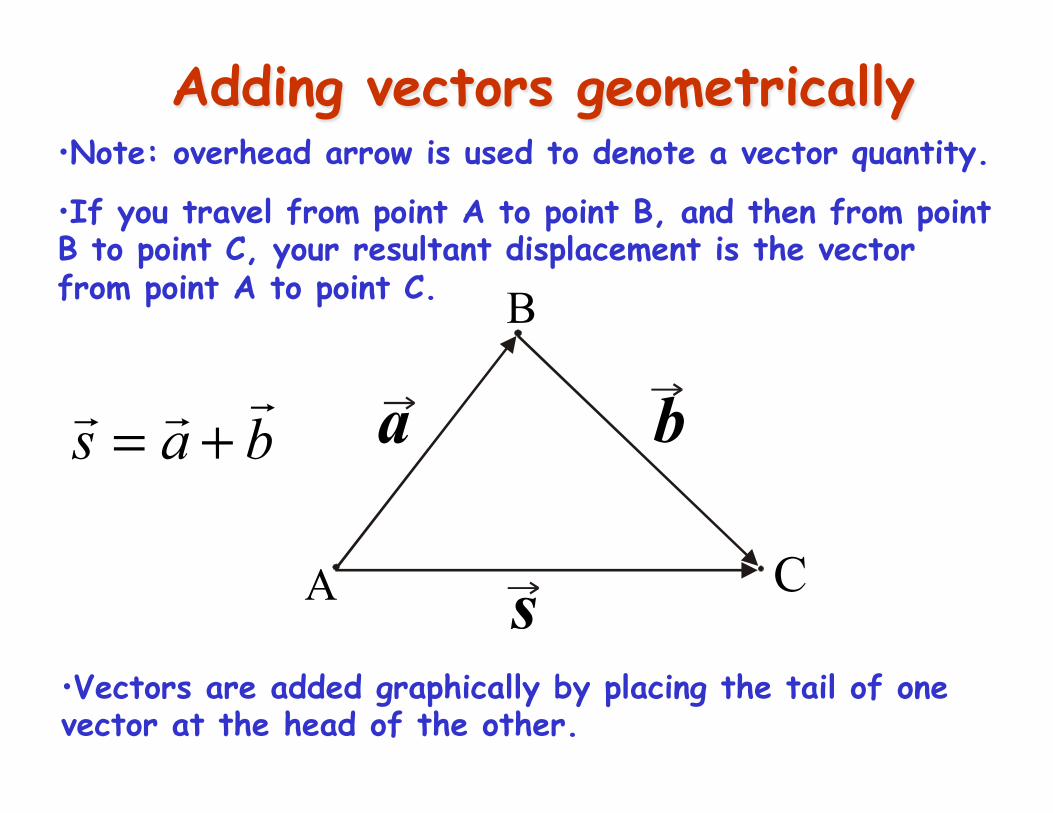
Adding vectors geometrically
• If you travel from point A to point B, and then from point B to point C, your resultant displacement is the vector from point A to point C.
A
B
a
C
b
s
!s = !a +
!b
• Vectors are added graphically by placing the tail of one vector at the head of the other.
• Note: overhead arrow is used to denote a vector quantity.
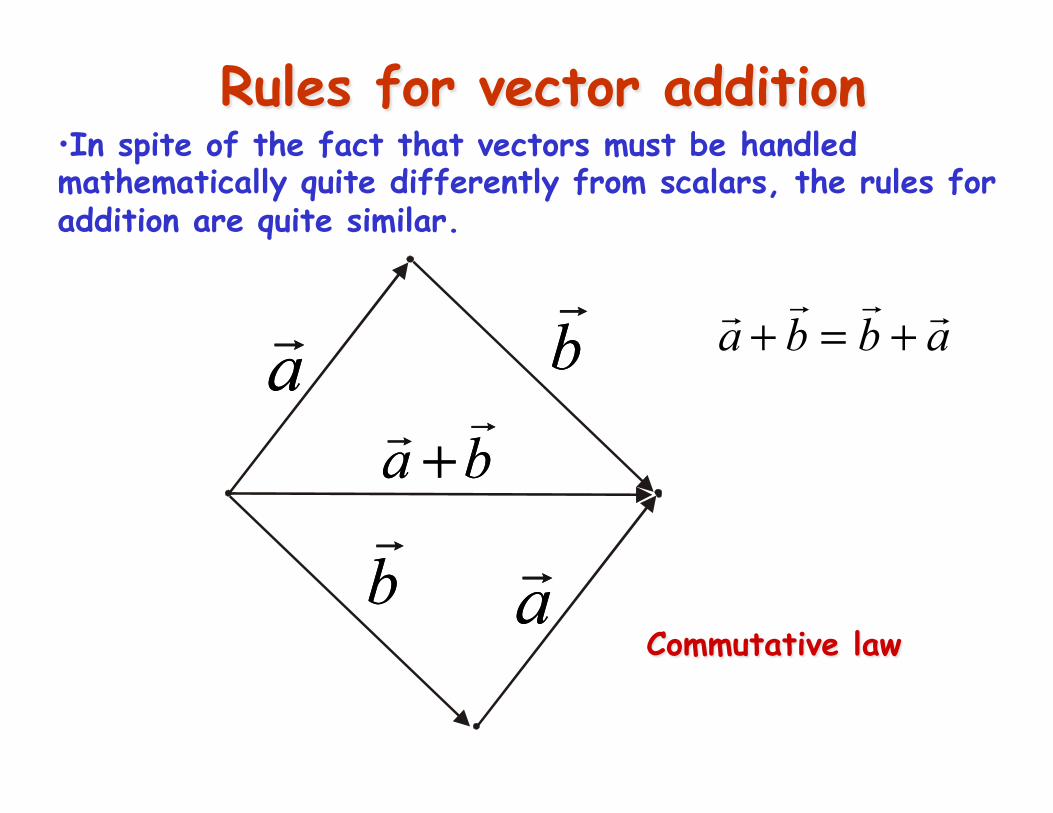
Rules for vector addition • In spite of the fact that vectors must be handled mathematically quite differently from scalars, the rules for addition are quite similar.
a!a b!b
a b+!!a b+
b!b a!a
!a +!b =!b + !a
Commutative law
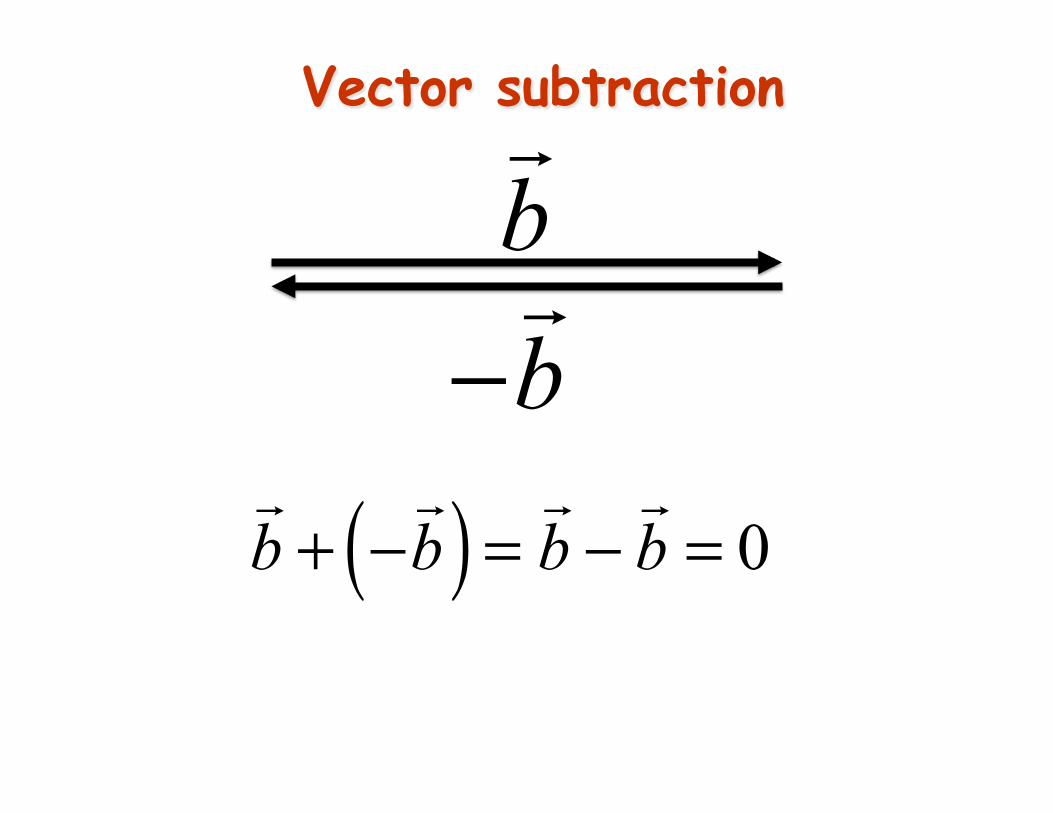
Vector subtraction
!b + −
!b( ) = !b −
!b = 0
−!b !b
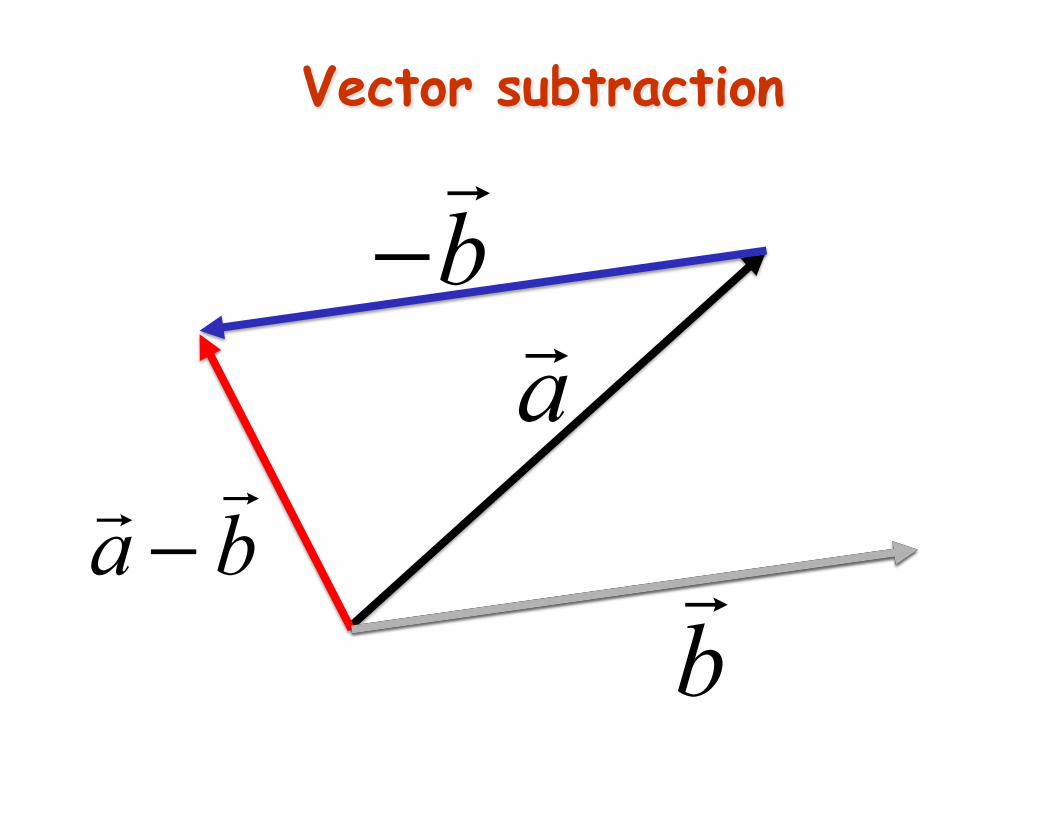
Vector subtraction
!b
!a
−!b
!a −!b
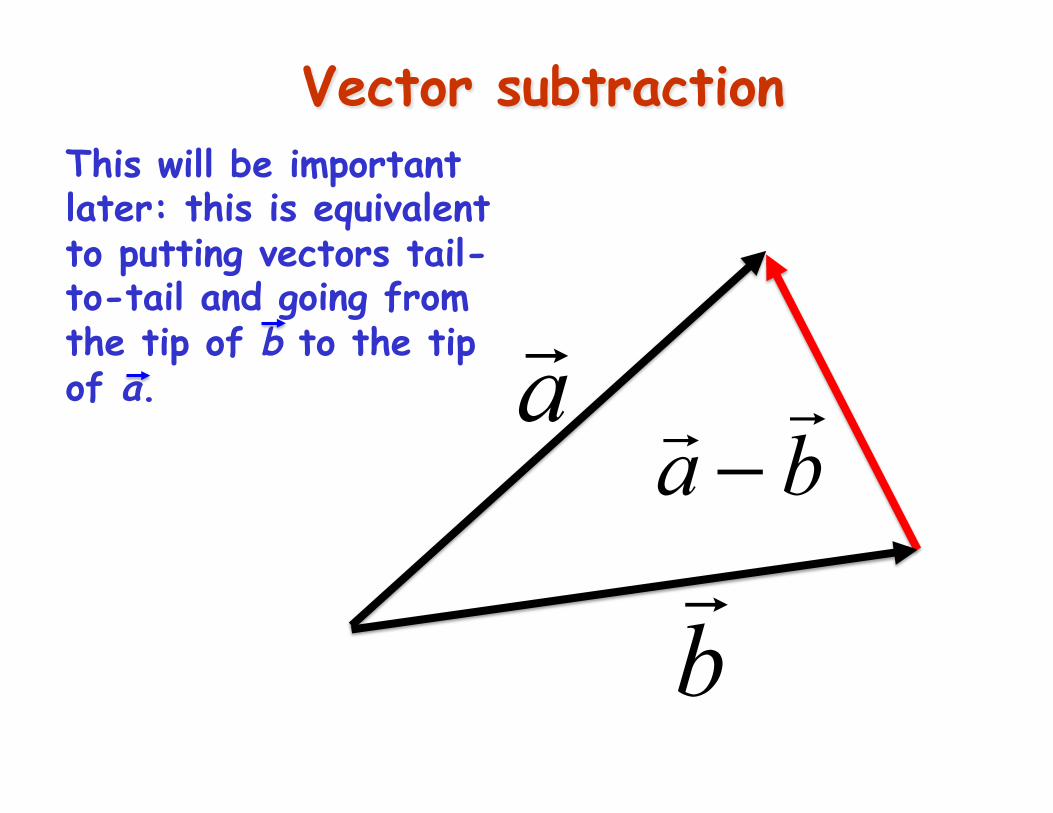
Vector subtraction
!b
!a
!a −!b
This will be important later: this is equivalent to putting vectors tail-to-tail and going from the tip of b to the tip of a.
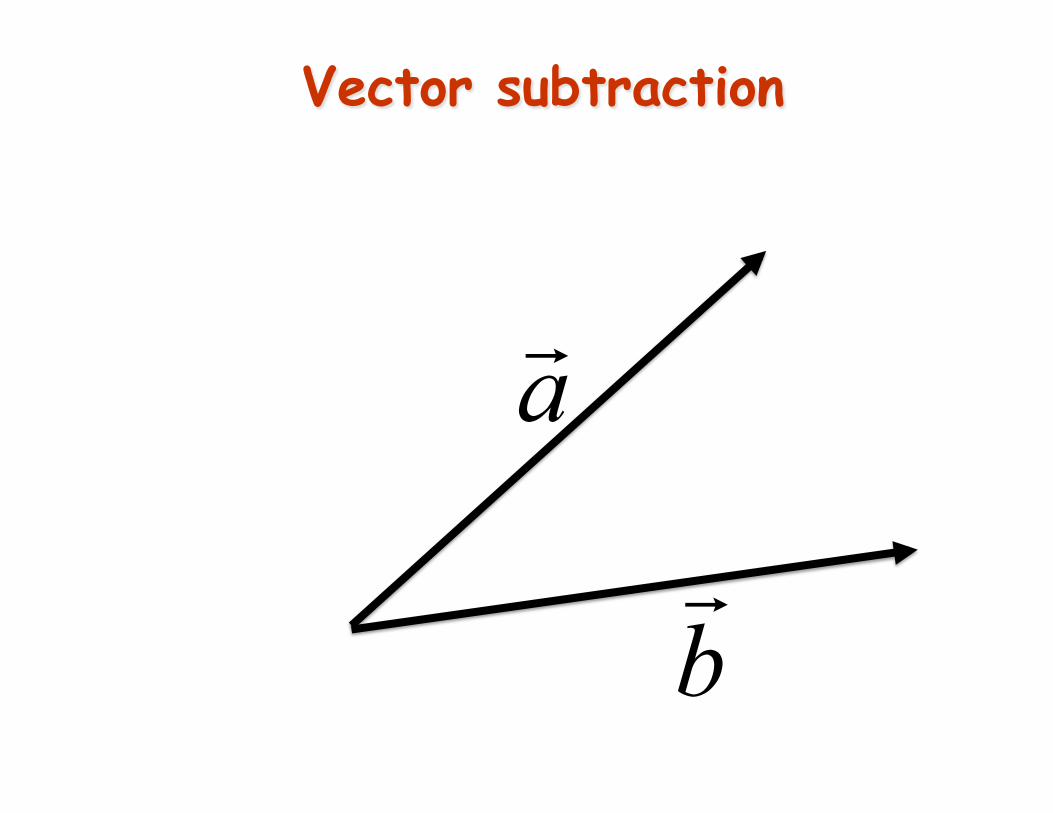
Vector subtraction
!b
!a
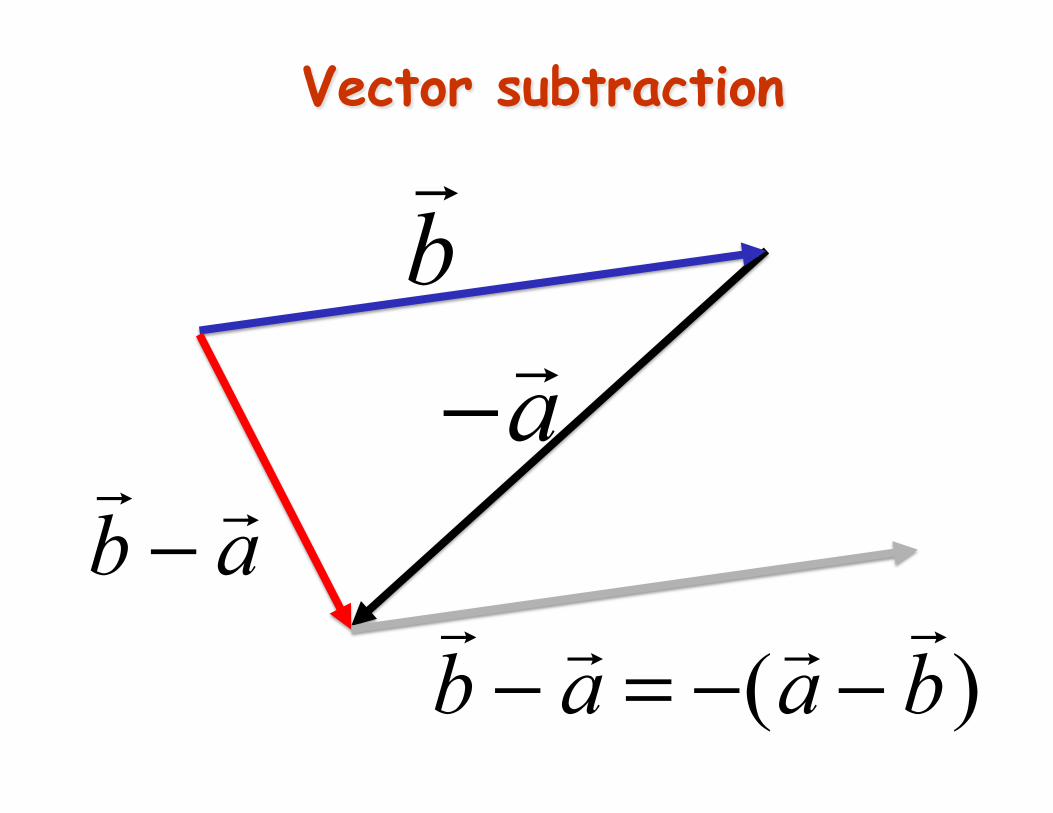
Vector subtraction
−!a
!b
!b − !a
!b − !a = −( !a −
!b)
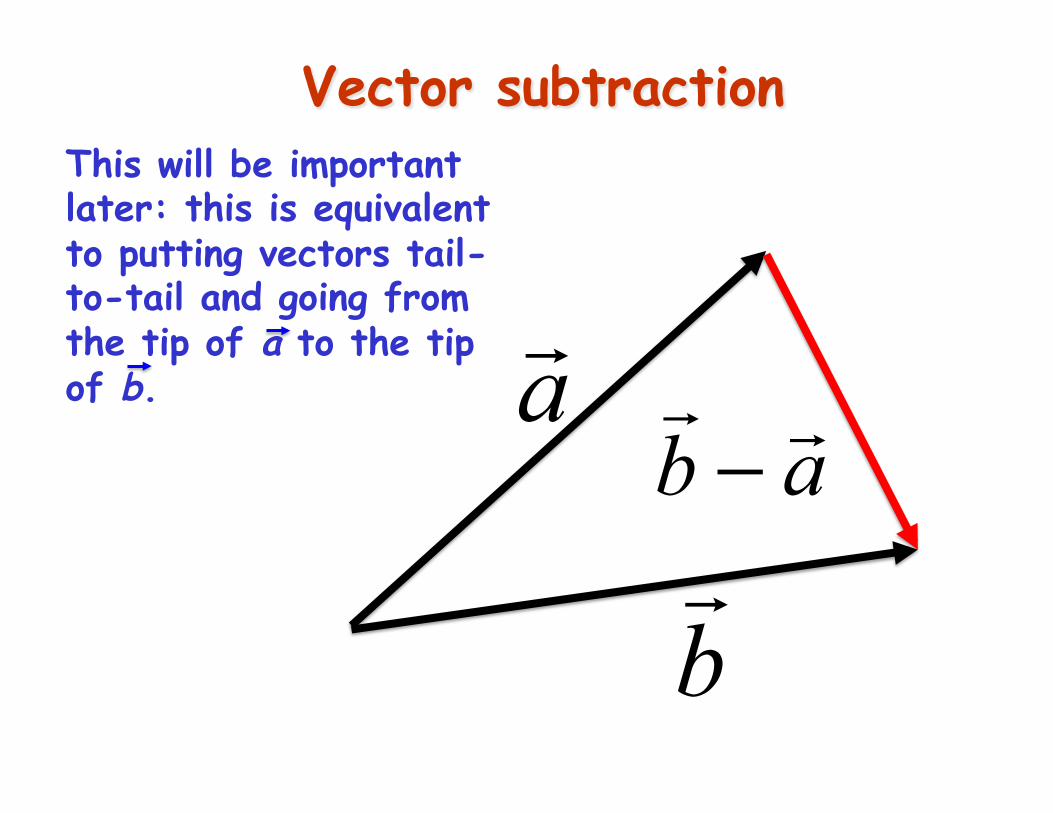
Vector subtraction
!b
!a
!b − !a
This will be important later: this is equivalent to putting vectors tail-to-tail and going from the tip of a to the tip of b.
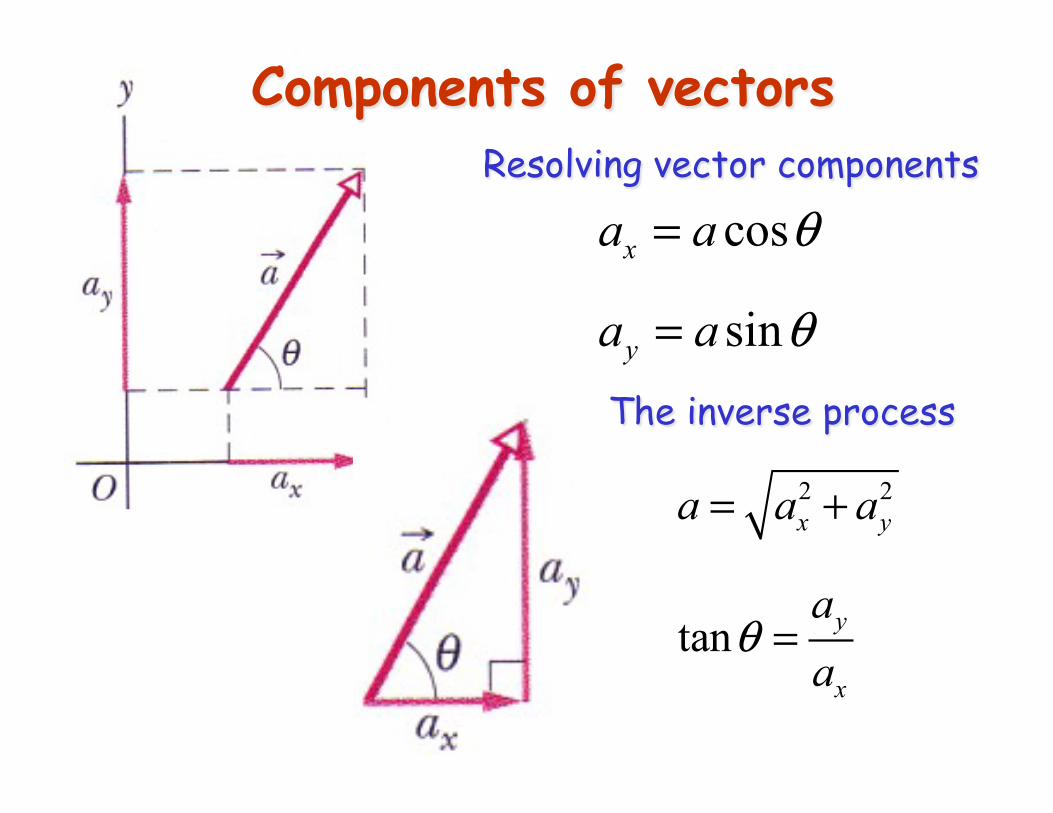
Components of vectors
cos
sin
x
y
a a
a a
θ
θ
=
=
Resolving vector components
The inverse process
2 2
tan
x y
y
x
a a a
aa
θ
= +
=

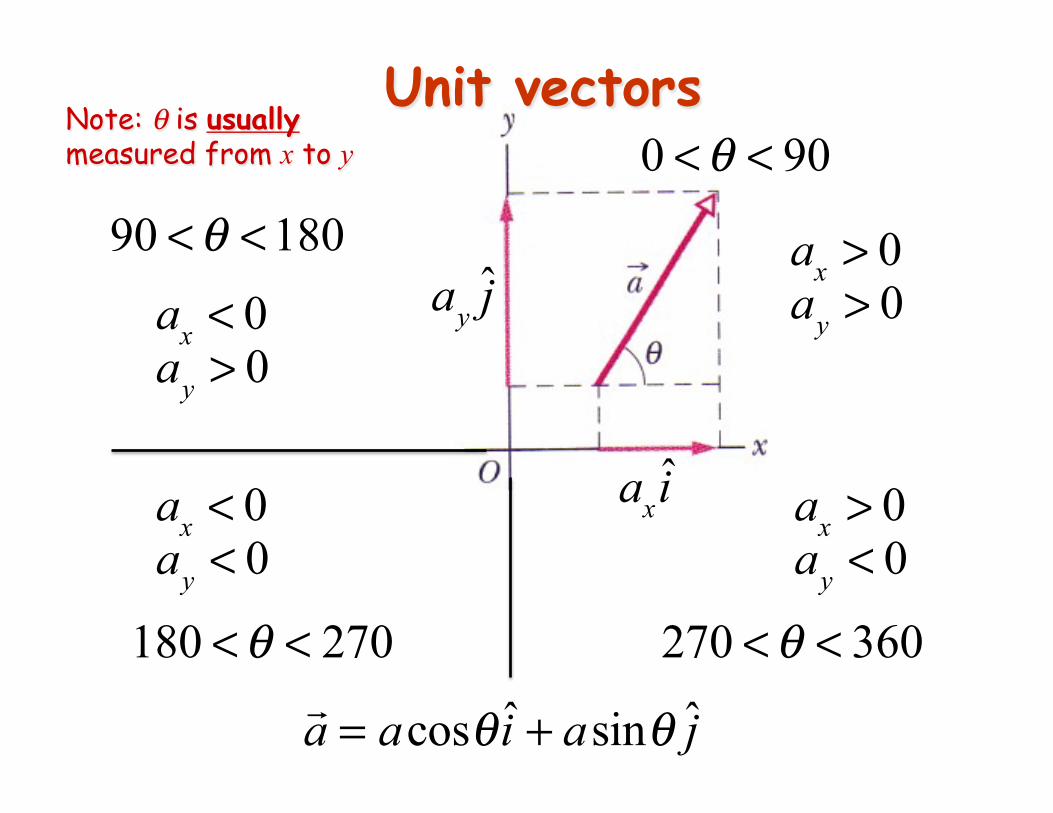
Unit vectors
i , j and k are unit vectors
They have length equal to unity (1), and point respectively along the x, y and z axes of a right handed Cartesian coordinate system.
x
y
z
!a = axi + ay j
ay j
axi
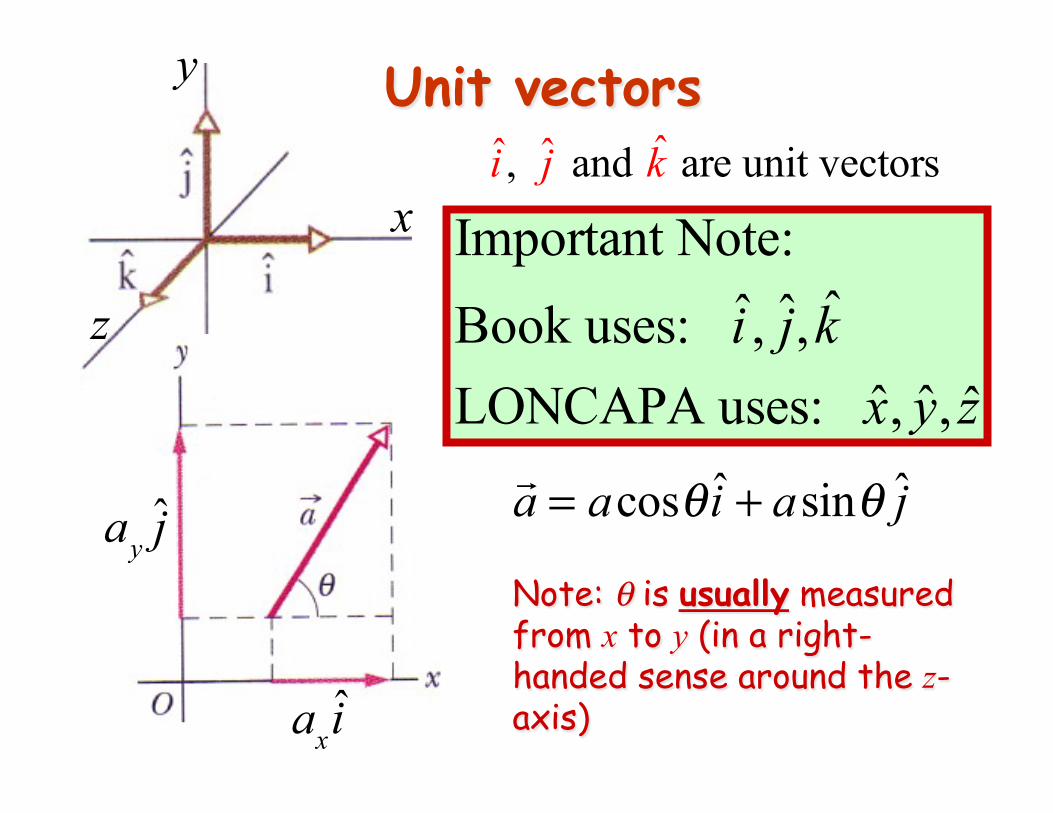
Unit vectors
x
y
z
!a = acosθ i + asinθ j
Note: θ is usually measured from x to y (in a right- handed sense around the z-axis)
ay j
axi
They have length equal to unity (1), and point respectively along the x, y and z axes of a right handed Cartesian coordinate system.
i , j and k are unit vectors
Important Note:Book uses: i , j, kLONCAPA uses: x, y, z
!a = acosθ i + asinθ j
ay j
axi
Unit vectors
90 <θ <180
180 <θ < 270 270 <θ < 360
ax > 0ay < 0
ax < 0ay < 0
ax < 0ay > 0
Note: θ is usually measured from x to y 0 <θ < 90
ax > 0ay > 0
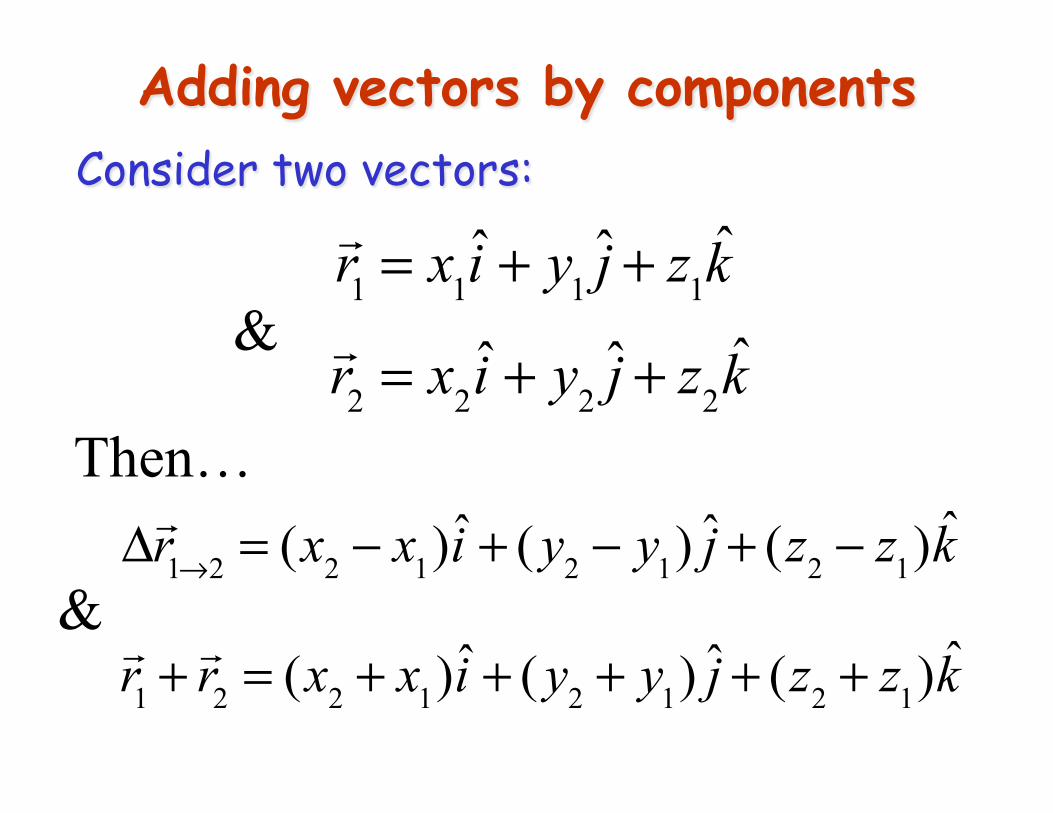
Adding vectors by components
Consider two vectors:
!r2 = x2i + y2 j + z2k
&
Δ!r1→2 = (x2 − x1)i + ( y2 − y1) j + (z2 − z1)k
!r1 +!r2 = (x2 + x1)i + ( y2 + y1) j + (z2 + z1)k
Then…
&
!r1 = x1i + y1 j + z1k
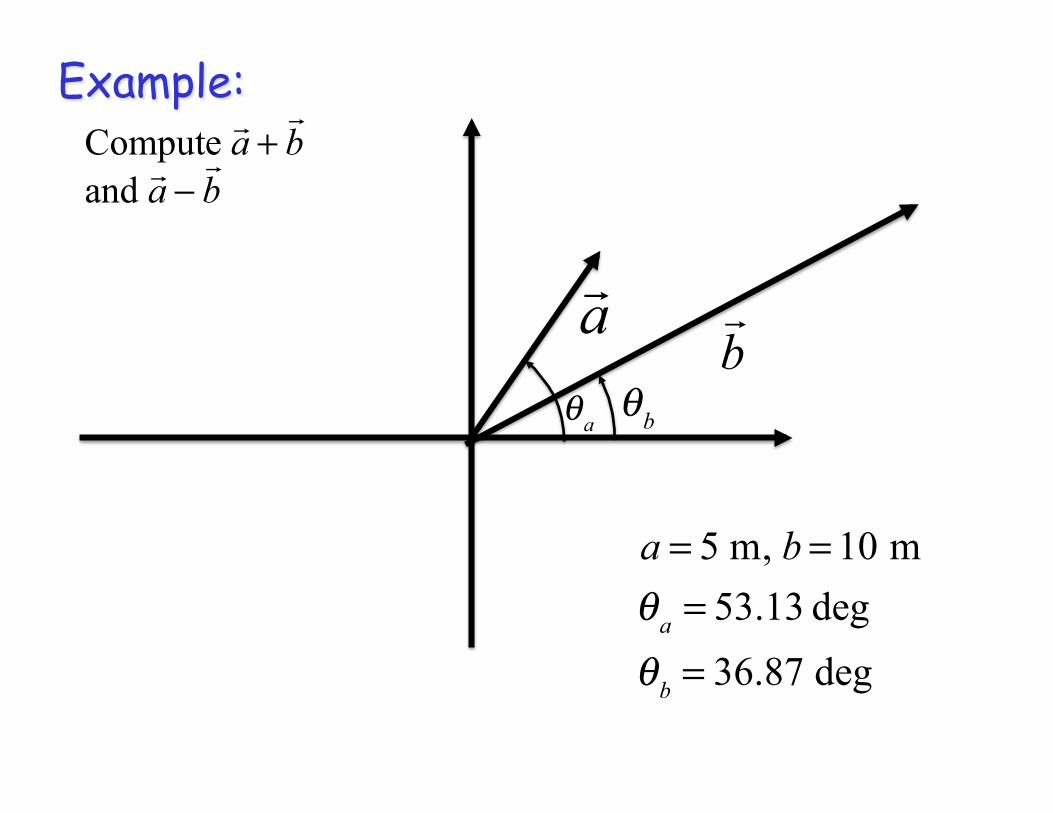
!a
!b
a = 5 m, b = 10 mθa = 53.13 degθb = 36.87 deg
θa θb
Example: Compute
!a +!b
and !a −!b
Appendices
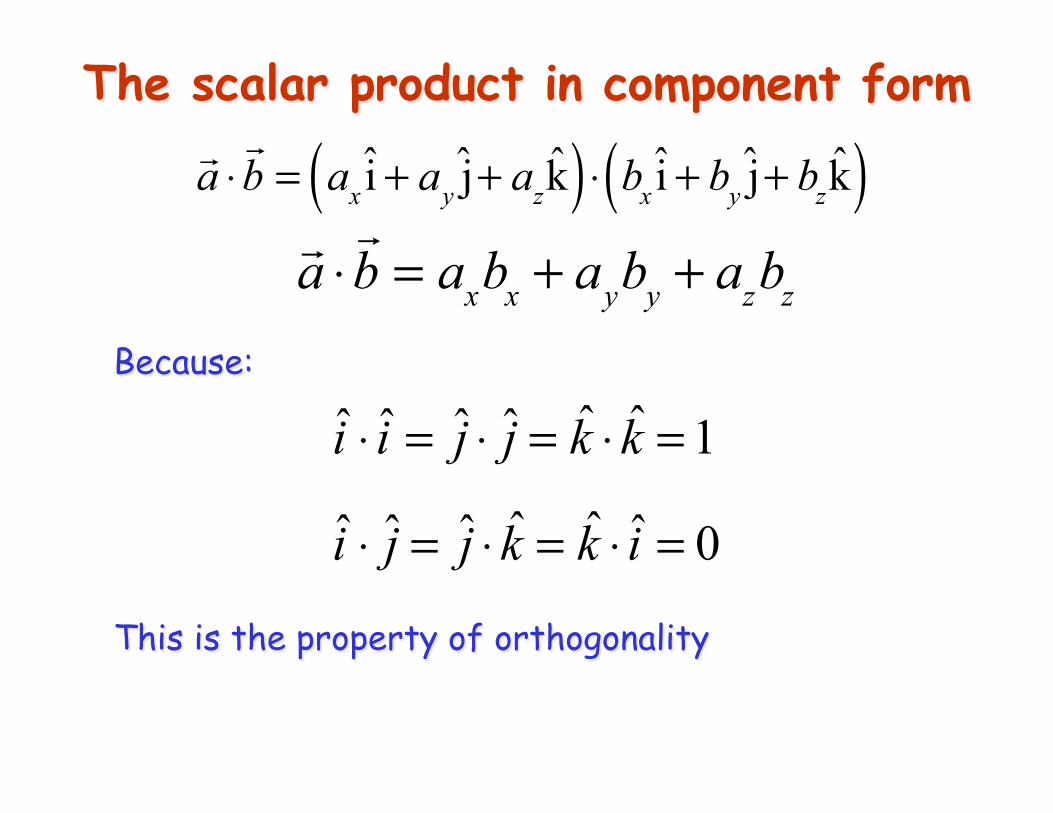
The scalar product in component form
!a ⋅!b = ax i + ay j+ azk( ) ⋅ bx i + by j+ bzk( )
!a ⋅!b = axbx + ayby + azbz
Because:
i ⋅ i = j ⋅ j = k ⋅ k = 1
i ⋅ j = j ⋅ k = k ⋅ i = 0
This is the property of orthogonality
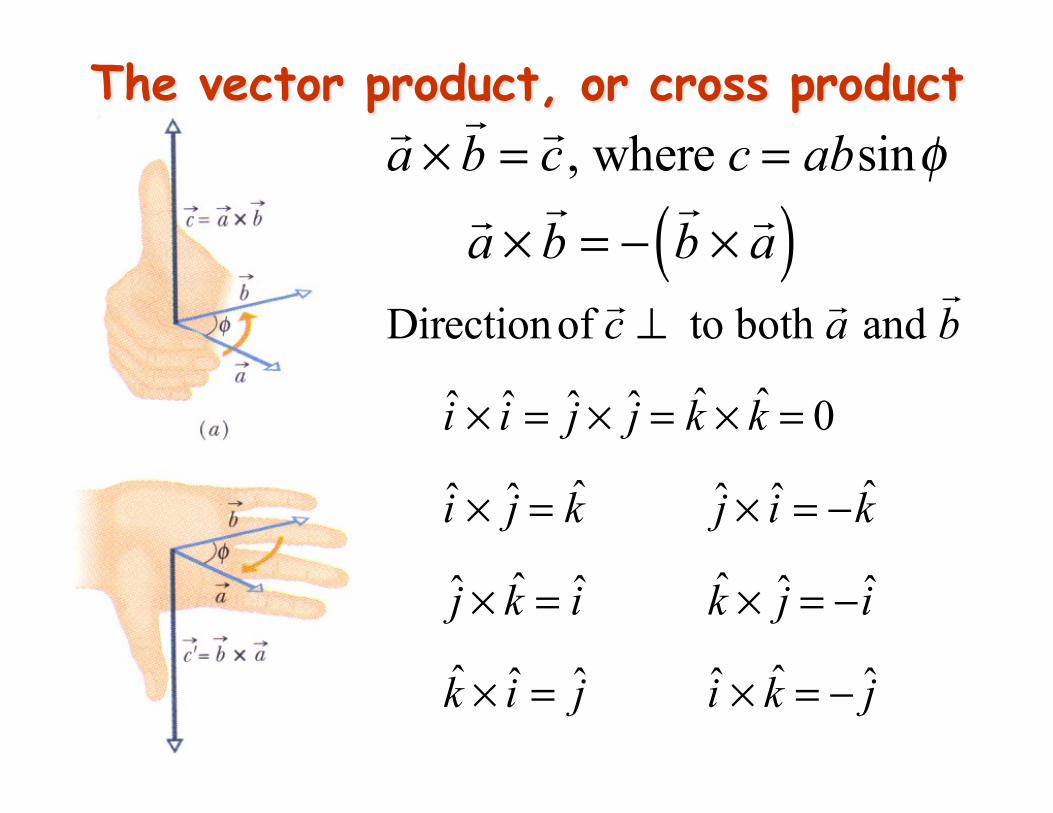
The vector product, or cross product
!a ×!b = !c , where c = absinφ
!a ×!b = −
!b × !a( )
Directionof!c ⊥ to both
!a and !b
i × i = j × j = k × k = 0
i × j = k j × i = − k
j × k = i k × j = − i
k × i = j i × k = − j
i
jk j+ve
i
jk j-ve
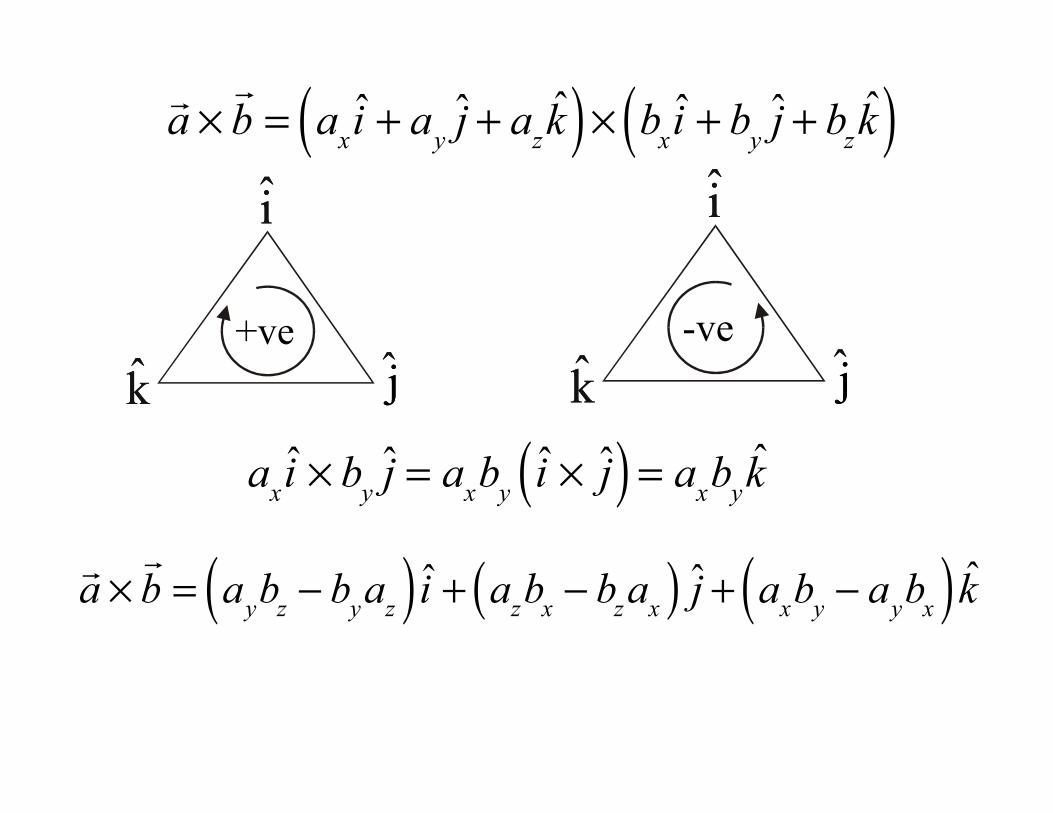
!a ×!b = axi + ay j + azk( )× bxi + by j + bzk( )
axi × by j = axby i × j( ) = axbyk
!a ×!b = aybz − byaz( ) i + azbx − bzax( ) j + axby − aybx( ) k