chapter 6 rst controller 6.1...
TRANSCRIPT
CHAPTER 6
RST CONTROLLER
6.1 INTRODUCTION
Usually controllers can be designed either in analog domain or
digital based on the requirement. Reference Signal Tracking (RST)
controller design is the elegant pole placement based controller among
the various methods available for linear SISO systems. Basically RST
controller has a two degree of freedom structure. The RST controller
comprises of three polynomials namely R, S & T which are usually
tuned by pole placement method. RST controller is becoming
widespread in electrical engineering application, for advanced control
such as in shunt and series active compensators used in power quality
improvement. The controller provides both feed-forward and feedback
actions. Single degree of freedom controllers like PID, IMC can
effectively are very effective in set point tracking but poor in
disturbance rejection, however, the disturbance rejection can be
obtained at the cost of reduced stability margins.
The PID and IMC controllers are basically feedback controllers as
they are placed in feedback path and modify the error signal or
feedback signal. One the major drawback of feedback controller is, it
will not process the input signal, hence cannot reject input signal
disturbance. The situations where feedback controller cannot be used,
feed-forward controller can be used. The controller is based on the
resolution of a Diophantine equation. In these early works, the authors

have dealt with rejection of low-frequency disturbances of nth order
polynomial while maintaining the closed loop gain unity. Constant
reference inputs like step signals are taken care. Later ramp type
reference signals tracking were resolved by the auxiliary Diophantine
equation. In all the early works, the design of controller is purely in
digital domain. The main drawback in the digital domain is the
selection of sampling time and errors while conversion of analog to
digital. In this chapter, RST controller design is presented in analog
domain.
6.2 OPERATION
The fig 6.1 represents the closed loop system of the process to be
controlled with RST controller [41], [42]. As seen from the fig 6.1,
Fig 6.1: closed loop system of process to be controlled with RST controller
( )
( )
B s
A s is the plant
( )
( )
R s
S s is the feedback controller
( )
( )
T s
S s is the feed-forward controller
The closed loop transfer function becomes
s inv L
BT SDV V I
AS BR AS BR
(6.1)
Again there are two requirements of the controller which are specified
as:
1s
inv
V BT
V AS BR
(6.2)
0s
L
V SD
I AS BR
(6.3)
These two requirements lead to two objective functions, which have
to be satisfied. Moreover, these two constraints are depending on each
other and are related as almost inversely proportional to each other.
Hence the selection of the control parameters depends on the weightage
given to the constraint. A good solution to the problem is to apply
multi objective optimization technique for control variable selection.
Another solution is to place the poles appropriately and check the
constraints by trial and error basis.
6.3 Diophantine Equation
Given G(s), if there exists a proper compensator C(s)= R(s)/S(s) so
that all poles of E(s) can be arbitrarily assigned, the design is said to
achieve arbitrary pole placement. In the pole placement, if a complex
number is assigned as a pole, its complex conjugate must also be
assigned. The pole placement equation can be written as
( )* ( ) ( )* ( ) ( )A s S s B s R s E s (6.4)

This polynomial equation is called a Diophantine equation [43],
[44]. The crux of pole placement is solving the Diophantine equation
( )* ( ) ( )* ( ) ( )A s S s B s R s E s (6.5)
In this equation, A(s) and B(s) are known, E(s) is to be chosen by
pole placement in order to obtain R(s) and S(s) functions. If A(s) and
B(s) have common factor, then E(s) cannot be chosen arbitrarily. If does
not have any common factors, then E(s) can be chosen arbitrarily. E(s)
refers to the closed poles to be chosen so as to meet the desired
performance criteria. For proper regulation,
deg E(s) ≤ 2deg A(s)-1 (6.6)
deg T(s) ≤ deg E(s)- deg A(s) (6.7)
deg R(s) deg E(s) – deg A(s) (6.8)
deg S(s) ≤ deg R(s) (6.9)
As per the regulation criteria,
Deg E(s)=2 and can be written as
3 2
3 2 1 0( )E s E s E s E s E (6.10)
Similarly, the other polynomials can be written as
1 0( )R s R s R
(6.11)
1 0( )S s S s S (6.12)

0( )T s T (6.13)
In order to choose closed loop poles, the polynomial ( )E s can be
sub classified as two components namely: 1( )E s and 2 ( )E s . 1( )E s is the
closed loop poles chosen to satisfy the desired regulation performance.
2 ( )E s is the auxiliary poles chosen either to provide filtering effects in
certain frequency region or to reduce stress on the PWM controller as
well as to improve the robustness of the closed loop system. The
control variables ( )R s , ( )S s can be calculated by the matrix called
Sylvester matrix given as:
00 0 0
11 0 0 0
22 1 1
32 1
0 0
0
0 0
0 0 0
EA B S
EA A B R
EA A S
EA R
(6.14)
6.4 THEORETICAL DESIGN
Algorithm for selection of closed loop poles
Step 1: Obtain the open loop poles of the plant.
Step 2: From the open loop poles obtain the damping factor and
natural frequency
Step 3: Fix the degree of control variables S(s) & R(s) as per the
voltage regulation criteria and obtain degree of
characteristic equation.
Step 4: If the open loop poles are complex, then atleast one pair of
closed loop poles must be complex conjugate.
Step 5: Select the real pole close to origin, and desired damping
factor
In the RST controller, the polynomial R(s) refers to zeros, affects the
overshoot and settling time in the closed loop response. The overshoot

and rise time increases as the zero moves towards the left in the s-
plane. However, the values of R(s) polynomial also correspond to
voltage regulation with disturbance rejection. The polynomial S(s)
corresponds to poles in feedback path. Values of S(s) polynomial
corresponds to stability. The stability decreases as the poles move
towards left in s-plane increasing the response.
With values of R, L & C chosen as
1R , 3L mH and 20C F
The open loop poles of the plant without controller is given as
-166 ±4079i, which represent exponentially decreasing oscillatory
response for step input. When poles are compared with standard
second order poles, corresponding damping factor and natural
frequency are obtained as 0.04 and 4082 rad/sec.
From the equation 6.11, the Ro controls the disturbance rejection
and voltage regulation; hence Ro and R1 must be multiple of natural
frequency. Ro is chosen as 7.5 times the natural frequency, i.e 107
whereas R1 is chosen as twice the natural frequency, i.e 8246
From the equation 6.12, The So controls the stability, for minimum
stability, its value is chosen nearly same as natural frequency. The
overall closed loop transfer function with selected values is given as
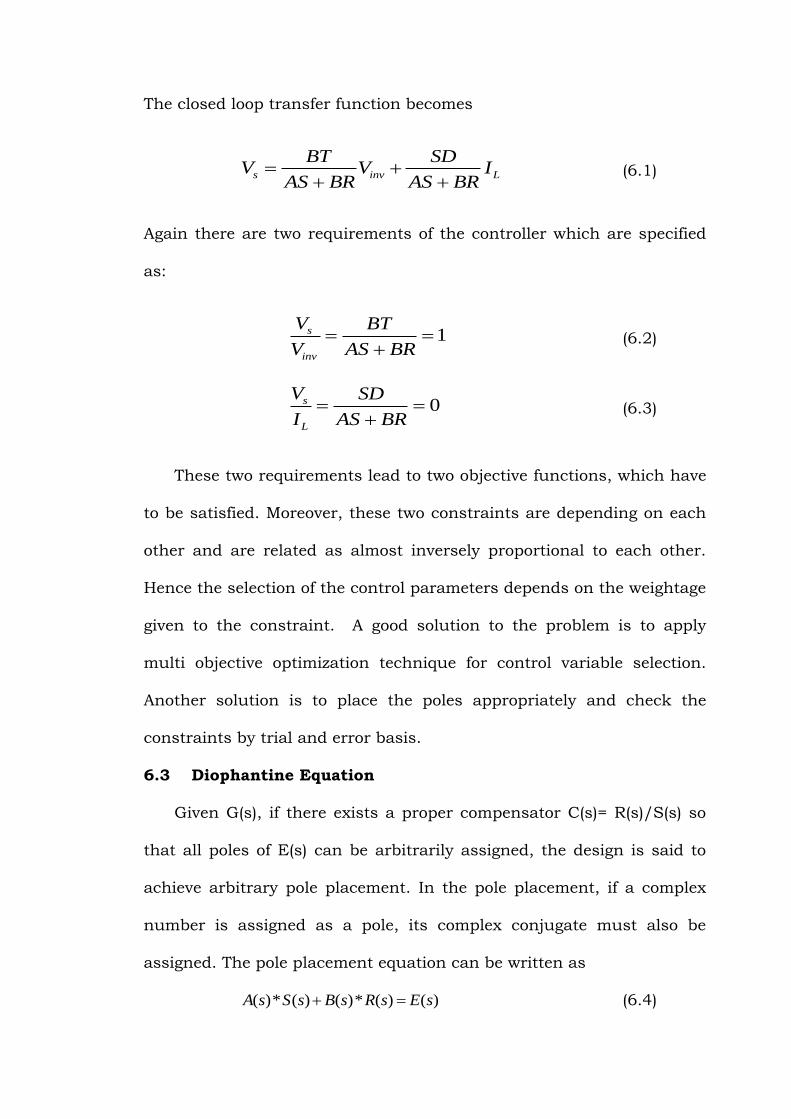
The simulink diagram of the closed loop system with disturbance is
shown in fig 6.2
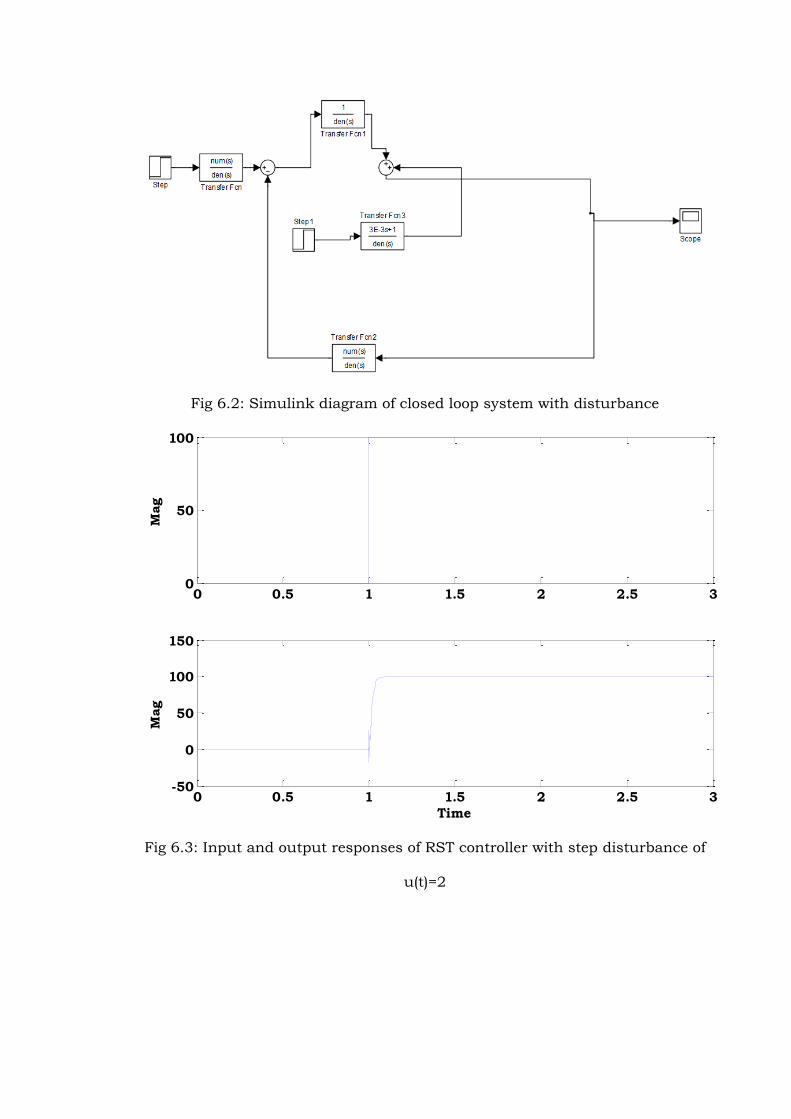
Fig 6.2: Simulink diagram of closed loop system with disturbance
0 0.5 1 1.5 2 2.5 3-50
0
50
100
150
Time
Mag
0 0.5 1 1.5 2 2.5 30
50
100
Mag
Fig 6.3: Input and output responses of RST controller with step disturbance of
u(t)=2

Bode Diagram
Frequency (rad/sec)
100
101
102
103
104
-180
-135
-90
-45
0
Ph
ase (deg)
-80
-60
-40
-20
0
Magn
itu
de (dB
)
Fig 6.4: Closed loop bode plot with RST control
Without disturbance, stability analysis is done for closed loop
system with RST controller. The fig 6.4 represents the bode plot for
closed loop system. The corresponding stability margins are:
Gain Margin : inf
Phase Margin : 1800
From, the fig 6.4, it is evident that the infinite gain margin indicates
the system has wide capability to withstand the perturbations in order
to come to verge of instability. The controller’s ability to reject the
disturbance can be verified by sensitivity functions.
Fig 6.5: Output sensitivity plot with RST control
As mentioned in the introduction, the output sensitivity function is
a good indicator of disturbance rejection. The output sensitivity
function provides the modulus margin (a performance index for
disturbance rejection). The fig 6.5 illustrates the bode plot for output
sensitivity function. The peak magnitude (should be less than 5db)
refers to modulus margin.
Bode Diagram
Frequency (rad/sec)
100
101
102
103
104
0
45
90
Ph
ase (deg)
-40
-30
-20
-10
0
10
Magn
itu
de (dB
)

6.5 SIMULATION RESULTS
The test system is described in chapter. In the test system, the
voltage sag is created by creating a fault with fault resistance of 0.66Ω.
This fault resistance results in 20% sag. The duration of fault is
between 0.5–0.8 secs. The voltage interruption is created by creating a
three phase fault with fault resistance of 0.001Ω. The duration of fault
is same as the voltage sag. The DVR is employed with independent dc
storage energy with open loop control. Usually DVR can mitigate voltage
fluctuation upto 50%. Research work carries study of DVR performance
in mitigating voltage interruption. Mitigation of voltage interruption
involves injection of large voltage which requires large dc energy
storage. Hence research work is carried out with open loop control for
DVR. The DVR operates during this period and its fast response to the
voltage fluctuations depends on the controller. It is observed that with
the proposed controller, DVR is able to respond to voltage sag and
interruption within 4ms. The controller performance is verified in DVR
to mitigate voltage sag & interruption. The case studies are presented
to test controller performance in the performance of DVR. The first case
study involves distribution system connected to RL Load with three
phase fault at the load end.

Case 1: Voltage sag mitigation with RST based DVR
0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1V
a(V
)
0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
Vb(V
)
0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
Time
Vc(V
)
Fig 6.6: Load voltage with RST control compensating voltage sag
The fig 6.6 depicts load voltage waveform with DVR injecting voltage
during the period of sag. It is evident from the fig that during the
period, load voltage is maintained at 98%. The total harmonic
distortion of load voltage is illustrated in fig 6.7
0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3
-0.5
0
0.5
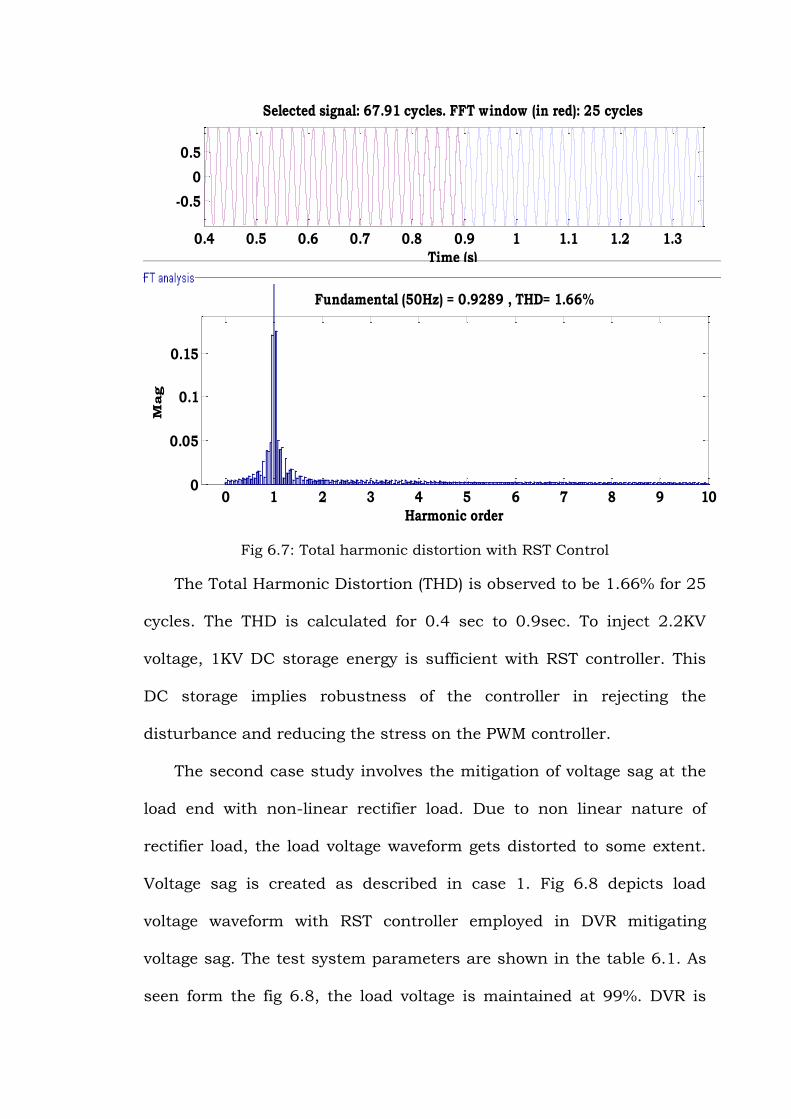
Selected signal: 67.91 cycles. FFT window (in red): 25 cycles
Time (s)
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
Harmonic order
Fundamental (50Hz) = 0.9289 , THD= 1.66%
Mag
Fig 6.7: Total harmonic distortion with RST Control
The Total Harmonic Distortion (THD) is observed to be 1.66% for 25
cycles. The THD is calculated for 0.4 sec to 0.9sec. To inject 2.2KV
voltage, 1KV DC storage energy is sufficient with RST controller. This
DC storage implies robustness of the controller in rejecting the
disturbance and reducing the stress on the PWM controller.
The second case study involves the mitigation of voltage sag at the
load end with non-linear rectifier load. Due to non linear nature of
rectifier load, the load voltage waveform gets distorted to some extent.
Voltage sag is created as described in case 1. Fig 6.8 depicts load
voltage waveform with RST controller employed in DVR mitigating
voltage sag. The test system parameters are shown in the table 6.1. As
seen form the fig 6.8, the load voltage is maintained at 99%. DVR is

able to restore normal voltage at the load end within 4ms. The
corresponding Total Harmonic Distortion (THD) is found to be 1.60%
Table 6.1: Test parameters with RST controller
Parameters Values
Supply Voltage 11kV
Filter Capacitance 20µF
Filter Inductance 3mH
Filter Resistance 1
Load power factor 45deg lagging
R 8246s+10*106
S s+4170
T s + 10*106
Case 2: DVR with rectifier load for mitigation of voltage sag
0 0.2 0.4 0.6 0.8 1-1
0
1
Va(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Vb(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Time
Vc(V
)
Fig 6.8: Load voltage after compensation of voltage sag for rectifier load

Fig 6.9: Total harmonic distortion of load voltage
Third case study illustrates the mitigation of voltage interruption
through DVR fed with RST controller. The voltage interruption is
created for duration of 0.5sec to 0.8secs. During this voltage
interruption, DVR injects a voltage to restore the load voltage to 1pu.
However, to mitigate voltage interruption DVR requires large dc storage,
possible with independent dc storage and open loop control. The fig
6.10 represents the load voltage with DVR injecting voltage during the
period of voltage interruption. Since, DVR has to inject large magnitude
of voltage; its response is not so fast compared to voltage sag. A small
delay is observed at 0.5secs which is due to filter and PWM controller.
This delay is observed only during mitigation of voltage interruption.
However, DVR is able to mitigate voltage interruption and load voltage
0 0.2 0.4 0.6 0.8 1-1
0
1
Selected signal: 58.09 cycles. FFT window (in red): 25 cycles
Time (s)
0 2 4 6 8 100
0.05
0.1
0.15
0.2
Harmonic order
Fundamental (50Hz) = 0.9426 , THD= 1.60%
Mag
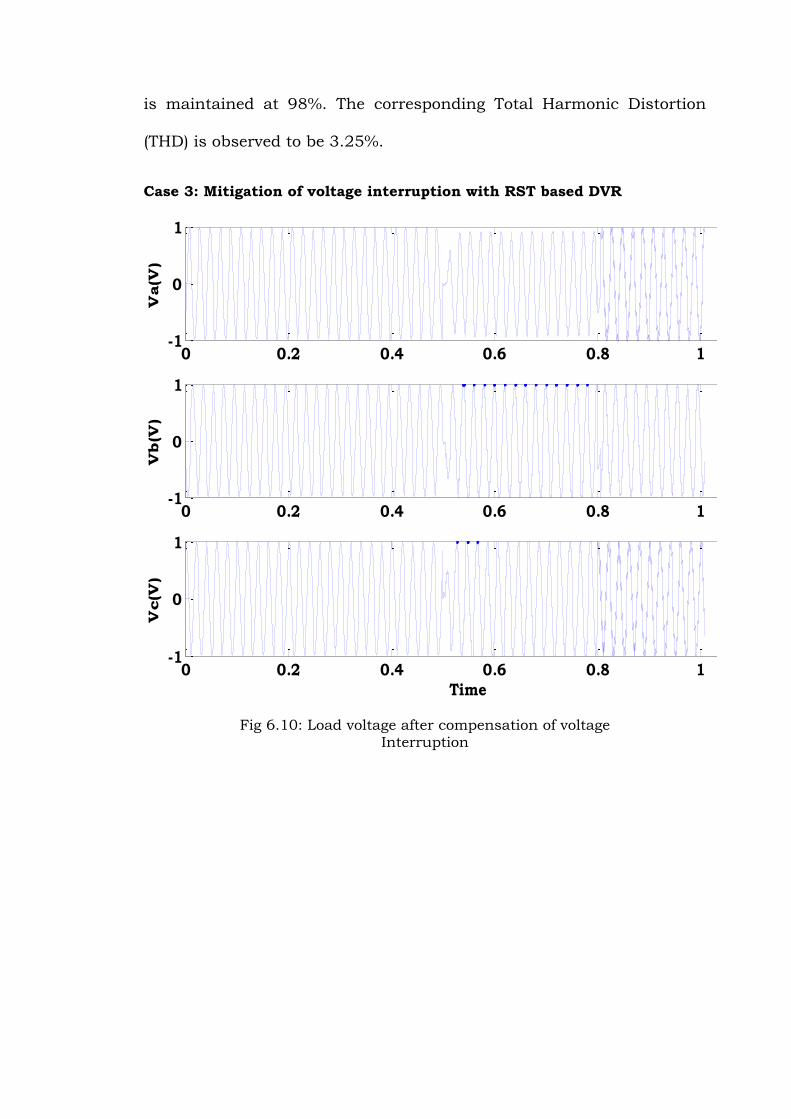
is maintained at 98%. The corresponding Total Harmonic Distortion
(THD) is observed to be 3.25%.
Case 3: Mitigation of voltage interruption with RST based DVR
0 0.2 0.4 0.6 0.8 1-1
0
1
Va(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Vb(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Time
Vc(V
)
Fig 6.10: Load voltage after compensation of voltage Interruption

0 0.2 0.4 0.6 0.8 1-1
0
1
Selected signal: 50.44 cycles. FFT window (in red): 25 cycles
Time (s)
0 2 4 6 8 100
0.1
0.2
0.3
0.4
Harmonic order
Fundamental (50Hz) = 0.6697 , THD= 3.25%
Mag
Fig 6.11: Total harmonic distortion of load voltage
Fourth case study includes the mitigation of voltage interruption
with rectifier load. The rectifier load distorts the load voltage waveform
due to its non linear nature. The DVR ability to restore the load voltage
its normal shape is verified in this case study. The fig 6.12 refers to the
load voltage with DVR injecting missing voltage with independent dc
storage energy. The DVR takes one cycle to restore the load voltage to
1pu. This delay is due to LC filter and PWM controller. However, the
load voltage is restored to 98%. The corresponding THD is observed to
3.16%.

Case 4: DVR with rectifier load for mitigation of voltage interruption
0 0.2 0.4 0.6 0.8 1-1
0
1
Va(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Vb(V
)
0 0.2 0.4 0.6 0.8 1-1
0
1
Vc(V
)
Fig 6.12: Load voltage with RST control
0 0.2 0.4 0.6 0.8 1-1
0
1Selected signal: 54.14 cycles. FFT window (in red): 25 cycles
Time (s)
0 2 4 6 8 100
0.1
0.2
0.3
0.4
Harmonic order
Fundamental (50Hz) = 0.6671 , THD= 3.16%
Mag
Fig 6.13: Total harmonic distortion of load voltage with RST control

6.5 SUMMARY
RST controller is polynomial controller comprising of two degree
of freedom. The presence of two controllers; feed-forward
controller and feedback controller makes the RST controller two
degree of freedom.
Previous work on the RST controller is focused on digital domain.
. The main drawback in the digital domain is the selection of
sampling time and errors while conversion of analog to digital.
Diophantine equation and Sylvester matrix can be used for the
calculation of RST polynomials. Based on the type of poles of the
plant, the poles of Diophantine equation has to be chosen so as
to meet the desired targets.
In the RST controller, the values of R(s) polynomial controls the
voltage regulation and disturbance rejection whereas the values
of S(s) polynomial dictate stability.