chapter 2 - shodhgangashodhganga.inflibnet.ac.in/bitstream/10603/12759/7/07_chapter 2.pdf ·...
TRANSCRIPT
Chapter 2
Investigation of Underwater Sound Wave Propagation Characteristics
and Development of Sonar Range Equation
2.1 Introduction
Navigation is the process of directing a vehicle from one known place to other known place.
All navigational techniques involve locating the position of the vehicle being navigated in
relation to the known datum. Tracking of the mobile object whether moving in terrestrial
environment or in underwater environment is very important activity towards fulfilling its
mission. The process of acquiring/identifying the location of an object of interest is called
positioning. The example of one of the best known positioning systems is the Global
Positioning System (GPS). In this chapter, various terrestrial navigation and global
positioning systems have been described along with various classical under water positioning
approaches. In the underwater environment, avoiding collision of the Autonomous
underwater vehicle (AUV) with floating or fixed objects requires either prior knowledge of
the operating environment or sensing equipment for evaluating the environment in real time.
Having prior knowledge is not feasible for unstructured environments and therefore having
the sensing equipment is the only viable option. The sensing equipment in this case is the
sonar that is mounted on the AUV which scans the area in front and provides the images as
the output. These images are then required to be processed in order to detect the objects
coming in the path of the AUV in order to have safe navigation. Navigation sensor is a device
used to measure a property from which the navigation system computes its navigation
solution (eg. radio navigation receiver). In the subsequent paragraphs investigation of
underwater sound wave propagation characteristics and development of sonar range equation
are presented.
2.2 Terrestrial Navigation

Navigation technique is a method of determining position and velocity of a vehicle. A
navigation system is also referred to as navigational aid. Navigational aid is a device that
determines position and velocity. Terrestrial navigation systems are radio positioning systems
that use land-based transmitters or reference points for the calculation of position
information. Some of the terrestrial based positioning systems which use techniques
developed during Second World War are still in use. They are long range aid to navigation
(LORAN), dead reckoning (DR), and inertial navigation systems (INS).
2.2.1 Dead Reckoning
Dead reckoning is the process of estimating present position by projecting course and speed
from a known past position. It is also used to predict the future position by projecting course
and speed from a known present position. Dead reckoning measures either the change in
position or the velocity and integrates it. This is added to the previous position in order to
obtain current position. The speed or distance tracked is measured in the body coordinate
frame, so a separate altitude measured is required to obtain the direction of travel in the
reference frame. For a 2D navigation, a heading measurement is sufficient, whereas for 3D
navigation, a full 3 component measurement is needed.
The navigator uses dead reckoning in many ways, such as:
to predict landfall, sighting lights and arrival times,
to determine sunrise and sunset,
to evaluate the accuracy of electronic positioning information,
to predict which celestial bodies will be available for future observation.
The most important use of dead reckoning is to project the position of the ship in the
immediate future and avoid navigation hazards. Usually these techniques are combined with
one or more position fixing techniques in an integrated navigation system to get the benefits
of both systems.

2.2.2 VOR (Very High Frequency Omnidirectional Range)
VOR provides azimuthal guidance to an aircraft. True bearing is determined from
comparison of the two signals (carrier mode reference phase signal and side band mode
variable phase signal). It operates in the 108 MHz-118 MHz frequency range. VOR transmits
an omnidirectional reference signal (30Hz AM signal) and a variable signal (30Hz FM signal
on a sub carrier) from rotating highly directional antennas. The phase of the variable signal is
electronically varied according to the absolute direction. The relative phase of the AM and
FM signals vary with azimuth. The VOR receivers can obtain their heading with respect to
magnetic north, from the VOR beacon to an accuracy of 1-20 which corresponds to 7-14 Km
position accuracy at maximum range. The user (eg. aircraft receiver) can calculate its heading
from the phase difference it is experiencing.
2.2.3 Inertial Navigation
Inertial navigation System (INS) is a 3D dead-reckoning navigation system. INS is also
known as Inertial Measurement Unit (IMU). It consists of inertial sensor called IMU and
navigation processor. The IMU comprises 3 mutually orthogonal accelerometers and 3
gyroscopes aligned with the accelerometers. The navigation processor integrates the IMU
outputs to give the position, velocity and the acceleration.
3 accelerometers
3 gyroscopes
IMU
Navigation Processor
Position,
Velocity and
Acceleration
Initial Conditions INS
Fig. 2.1 The basic components of an INS
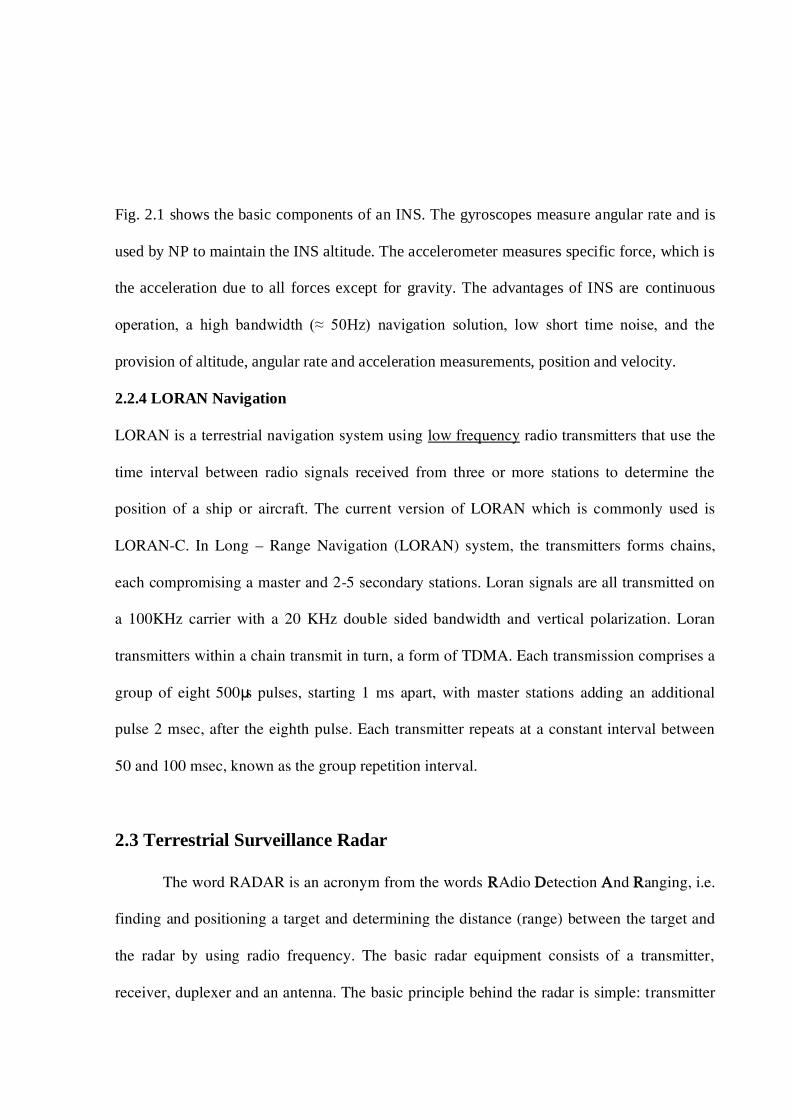
Fig. 2.1 shows the basic components of an INS. The gyroscopes measure angular rate and is
used by NP to maintain the INS altitude. The accelerometer measures specific force, which is
the acceleration due to all forces except for gravity. The advantages of INS are continuous
operation, a high bandwidth (≈ 50Hz) navigation solution, low short time noise, and the
provision of altitude, angular rate and acceleration measurements, position and velocity.
2.2.4 LORAN Navigation
LORAN is a terrestrial navigation system using low frequency radio transmitters that use the
time interval between radio signals received from three or more stations to determine the
position of a ship or aircraft. The current version of LORAN which is commonly used is
LORAN-C. In Long – Range Navigation (LORAN) system, the transmitters forms chains,
each compromising a master and 2-5 secondary stations. Loran signals are all transmitted on
a 100KHz carrier with a 20 KHz double sided bandwidth and vertical polarization. Loran
transmitters within a chain transmit in turn, a form of TDMA. Each transmission comprises a
group of eight 500μs pulses, starting 1 ms apart, with master stations adding an additional
pulse 2 msec, after the eighth pulse. Each transmitter repeats at a constant interval between
50 and 100 msec, known as the group repetition interval.
2.3 Terrestrial Surveillance Radar
The word RADAR is an acronym from the words RAdio Detection And Ranging, i.e.
finding and positioning a target and determining the distance (range) between the target and
the radar by using radio frequency. The basic radar equipment consists of a transmitter,
receiver, duplexer and an antenna. The basic principle behind the radar is simple: transmitter

sends out a very short duration pulse at a high power level. The pulse strikes an object (or a
target) and energy will be reflected (known as radar returns or echoes) back to the radar
receiver. Radar determines the distance (range) to the target by measuring the travel time of
the radar pulse to get the target and to come back and then divides that time in two.
For extracting the target information from the echo, the signal must be of sufficient
magnitude. The radar equation is used to predict the echo power to assist in making the
determination of whether or not above mentioned condition is met. These echoes are then
processed by the radar receiver to extract target information such as range, velocity, angular
position, and other target identifying characteristics. Radar can perform its function at long or
short distances and it can operate in darkness, haze, fog, rain, and snow. Its ability to measure
distance with high accuracy and in all weather conditions is one of its most important
attributes.
Radar Range Equation
The radar equation provides the relationship between the transmitted power, the
received power, the characteristics of the target, and characteristics of the radar itself. The
equation is also helpful to assess the performance of the radar. The maximum radar range
Rmax is given by
4/1
min3
22
max)4( S
GPR t
(2.1)
Where, Rmax is the maximum detection range between the radar and the target. It has the units
of meters (m).
Pt is termed the peak transmit power and is the average power when the radar is
transmitting a signal. It has the units of Watts.
λ is the radar wavelength. It has the units of meters (m).
G is the gain of the transmitter and receiver antenna.
σ is the target radar cross section or RCS and has the units of meters or m2.
Smin the minimum received power that the radar receiver can ‘sense’ and is referred
to as Minimum Detectable Signal (MDS). It has the units of Watts.
Properties of reflection of electromagnetic waves:
1. Electromagnetic energy travels through air at a constant speed, at approximately the
speed of light,
300,000 kilometres per second or
186,000 statute miles per second or
162,000 nautical miles per second.
This constant speed allows the determination of the distance between the reflecting
objects (airplanes, ships or cars) and the radar site by measuring the running time of
the transmitted pulses.
2. This energy normally travels through space in a straight line, and will vary only
slightly because of atmospheric and weather conditions. By use of special radar
antennas this energy can be focused into a desired direction. Thus the direction (in
azimuth and elevation) of the reflecting objects can be measured.
These principles can basically be implemented in a radar system, and allow the determination
of the distance, the direction and the height of the reflecting object.
2.4 Satellite Based Navigation Systems
Modern navigation systems are of two types. They are ground based and satellite
based navigation systems. Various ground based navigational systems are VOR, ILS,
LORAN etc. The ground based navigation systems encounter the problems such as ground
reflections, electromagnetic interference and reflections from the physical entities. These
problems are mostly nil in satellite based navigation systems, due to the space constellation.
Satellite navigation is based on a global network of satellites that transmit radio signals in the
low/medium earth orbit. The satellite navigation system has the following advantages: (i) The
satellite can transmit a radio frequency and carry a transponder beacon which provides all
weather service (ii) satellite navigation systems are capable of high accuracy. The modern
satellite based navigation systems are: TRANSIT, GPS, GLONASS and GALILEO.
2.4.1 TRANSIT
Transit was the first satellite aided navigation system deployed for civilian use from
1967. Transit worked on the Doppler principle using seven low orbiting satellites. Each of
these satellites used to transmit on two frequencies i.e., 150MHz and 400MHz. Position was
calculated by measuring the change in frequency of the satellite transmissions as it used to
speed past in low orbit. Using the satellite’s position and velocity information, the user
position was calculated by measuring the change in frequency of the satellite transmissions.
The TRANSIT satellites were orbiting in polar plane at an altitude of about 1100Km. The
TRANSIT satellites were affected more by gravity field variations than the higher orbiting
satellites like GPS. Since their numbers were limited, one did not get a ‘fix’ very often.
Further, transmissions of TRANSIT satellites at 150MHz and 400MHz were more
susceptible to ionospheric delays and disturbances than the higher Global Positioning System
(GPS) frequencies. After GPS became fully operational, TRANSIT was discontinued on 31st
December 1996 (Leick, 2004).
Several orbiting satellite systems, which are presently used for global positioning, include:
United States Global Positioning System (GPS)
Russian Global Navigation Satellite System (GLONASS)
European Galileo system

2.4.2 GPS
GPS is a satellite based radio navigation system designed and developed by the
Department of Defense (DOD), U.S.A. The first GPS satellite was launched on February 22,
1978. GPS provides accurate three dimensional user position anywhere in the world and
under all weather conditions (Kaplan 1996). The satellites transmit at frequencies L1
(1575.42MHz) and L2 (1227.6MHz) modulated by the two types of codes and the navigation
message. At present the L1 carrier is modulated with C/A and P-codes, whereas L2 is
modulated with P-code only. The advantages of GPS are: i) intentional interference like
Jamming and unintentional interference will affect GPS least since spread spectrum
techniques are used in it and ii) system accuracy can be improved to the order of centimeters
using differential techniques like Differential Global Positioning System (DGPS), WAAS,
GAGAN etc., Full operational capability of GPS was achieved on July 17, 1995.
i) Principle of operation of GPS: GPS is operating on a set of 24 satellites that are
continuously orbiting the earth. These satellites are equipped with atomic clocks and send out
radio signals as to the exact time and their location. The radio signals from the satellites are
picked up by the GPS receiver. Once the GPS receiver locks on to four or more of these
satellites, it can triangulate its location from the known positions of the satellites.
ii) Basic equations for finding user position
In this section, the basic equations for determining the user position are presented. Assume
that the distance measured is accurate and under this condition, three satellites are sufficient.
In Fig. 2.2, there are three known points at locations r1 or (x1, y1, z1), r2 or (x2, y2, z2), and r3
or (x3, y3, z3), and an unknown point at ruor (xu, yu, zu). If the distances between the three
known points to the unknown point can be measured as ρ1, ρ2, and ρ3, these distances can be
written as

(2.2)
(2.3)
(2.4)
Because there are three unknowns and three equations, the values of xu, yu, and zu can be
obtained from these equations. Theoretically, there should be two sets of solutions as they are
second-order equations. These equations can be solved easily with linearization and an
iterative approach. In GPS operation, the satellite positions information can be obtained from
the data transmitted from the satellites.
Fig. 2.2 Use of three known positions to find one unknown position.
The distances from the user (the unknown position) to the satellites must be measured
r1(x1,y1,z1) r2(x2,y2,z2)
r3(x3,y3,z3)
(xu,yu,zu)
user location
x
y
z
ρ1
ρ2
ρ3

simultaneously at a certain time instant. Each satellite transmits a signal with a time reference
associated with it. By measuring the time of the signal travelling from the satellite to the user,
the distance between the user and the satellite can be found (G S Rao, 2010).
2.5 Underwater Navigation
Under water navigation is the process of directing the movements of submersible vehicles,
including divers, from one point to another. The development of contemporary submersible
vehicles, coupled with advances in saturated diving, has resulted in new requirements for
underwater navigation. The choice of the navigation system therefore depends on factors like
required precision, area to be covered, availability of surface vessels, sea state under which
they are expected to operate, including the redundancy which is necessary for safety.
Submarines are required to operate over wide areas of the ocean and often under highly
secure and covert conditions; therefore, navigation techniques which depend upon acoustics
are needed because the techniques like Radar and GPS cannot be used. This is because radar
uses radio waves in the microwave frequency range, which have approximately one
centimetre wavelength. This wavelength range is used because it is easier to direct the waves
with small antennas in narrow beams. Unfortunately, microwaves are strongly absorbed by
sea water within very short distance of their transmission. The reason is mainly because sea
water is good conductor of electricity. Therefore to detect the target which is at a distance of
miles away, it is not possible to use radar in underwater environment.
Similarly GPS is also unusable for underwater navigation because the signal used in GPS is
also an electromagnetic signal, which propagates well in air but can only travel for a very
short distance underwater because of its high absorption rate in water. Seventy percent of the
Earth is covered by sea. In these areas where Radar and GPS cannot work, alternative
underwater positioning systems play an important role. Positioning an underwater target with

respect to a reference platform is required in diverse areas in ocean scientific research,
industry engineering tasks and military activities. An underwater acoustic positioning system
tracks and navigates underwater vehicles or divers by means of acoustic distance and
direction measurements, and subsequent position triangulation. Unlike the in-land positioning
systems such as GPS, which use electromagnetic signals, the underwater positioning systems
use acoustic signals, because acoustic signals have a lower absorption rate in sea water, as
compared to that of electromagnetic signals. As a result, acoustic wave can propagate a much
longer distance in underwater environment. Basic components of an acoustic positioning
system include a transceiver and an array of transponders (or a transponder and an array of
transceivers), a processing unit and a display unit. The transceivers and the transponders
transmit and receive acoustic signals for distance and direction measurements. The spacing
between transponders (or transceivers) in the array is called baseline. Underwater acoustic
positioning systems are categorized into three major groups according to the size of their
baselines as
i) Long Baseline (LBL) Systems
ii) Short Baseline (SBL) Systems
iii) Ultra-Short Baseline (USBL) Systems
In addition, also due to fast development in GPS technology, new underwater acoustic
positioning systems have arisen that utilize buoys equipped with GPS receivers and acoustic
communication techniques.
2.5.1 Long Baseline (LBL) Positioning Systems
A typical LBL positioning system consists of one transceiver and at least three transponders.
The transceiver is mounted on a submersible or a surface vessel, which is the target to be
positioned. The transponders are installed on the seafloor to form an array. Before positioning
the target, transponders will be deployed on the seafloor. Their position (or at least the

distances between each other) needs to be known precisely. The deployment and retrieval of
transponders on the seafloor is performed by a surface ship, or by divers or an underwater
automatic vehicle. The spacing between transponders (i.e. the LBL baseline) is 50-2000m in
an LBL system. The transceiver on the target pings each transponder on the seafloor. The
travelling time of the transmitted signal from the target to the transponders and backwards is
measured. Knowing the sound velocity at the site allows this measurement to be converted
directly in to travelling distances. Once the distances from all transponders to the transceiver
are obtained, a unique point where all these distances intersect is obtained via calculations
and this point is the position of the transceiver. This method is called “trilateration”. The
calculated transceiver’s position is within and referenced to the transponders array. Fig. 2.3
illustrates the Long Baseline Positioning Systems.
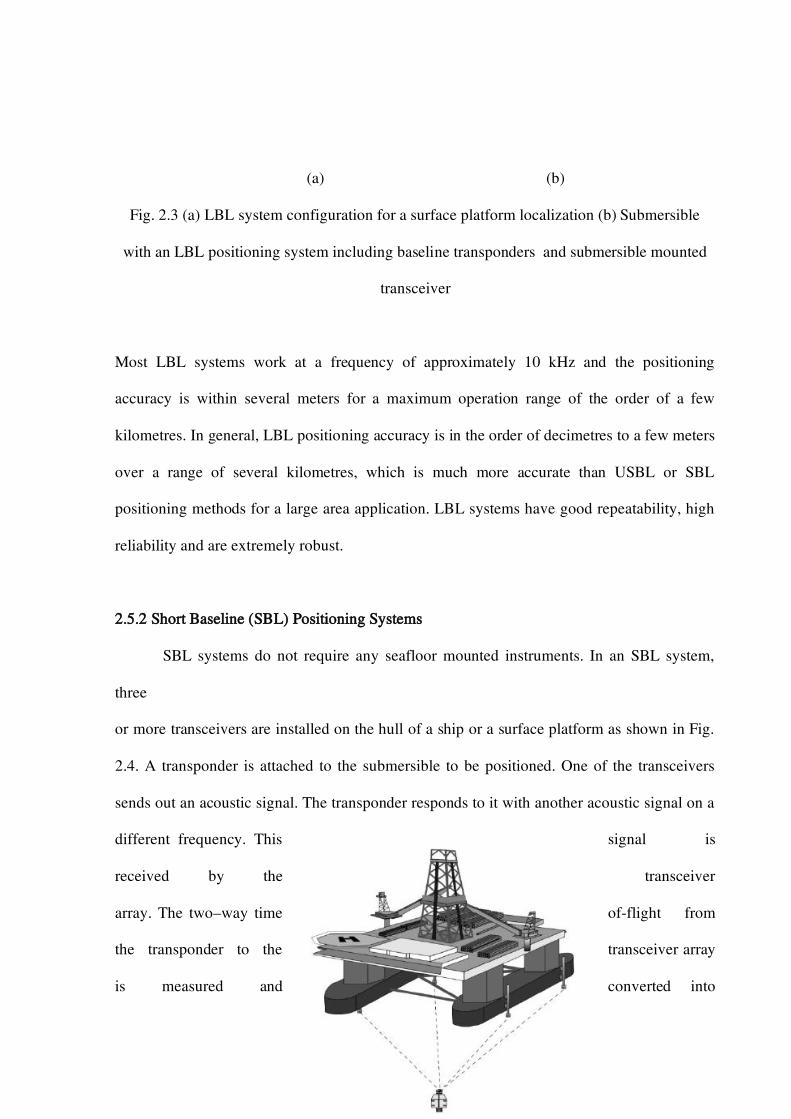
(a) (b)
Fig. 2.3 (a) LBL system configuration for a surface platform localization (b) Submersible
with an LBL positioning system including baseline transponders and submersible mounted
transceiver
Most LBL systems work at a frequency of approximately 10 kHz and the positioning
accuracy is within several meters for a maximum operation range of the order of a few
kilometres. In general, LBL positioning accuracy is in the order of decimetres to a few meters
over a range of several kilometres, which is much more accurate than USBL or SBL
positioning methods for a large area application. LBL systems have good repeatability, high
reliability and are extremely robust.
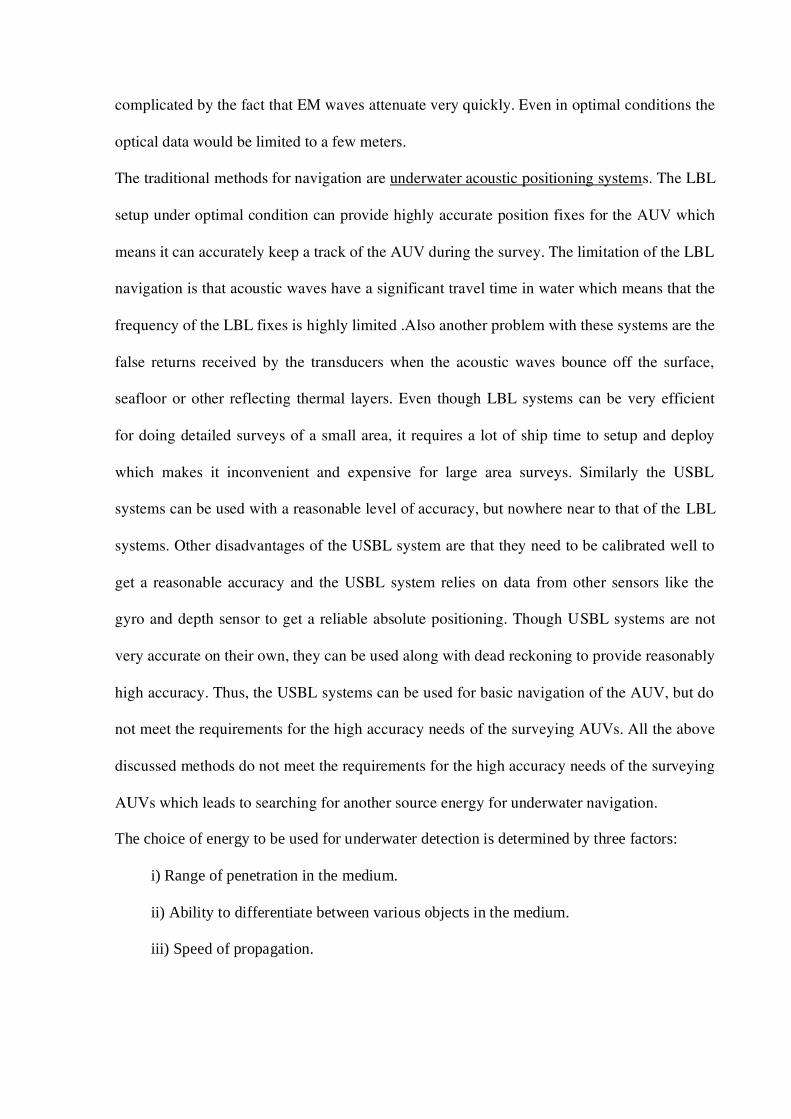
2.5.2 Short Baseline (SBL) Positioning Systems
SBL systems do not require any seafloor mounted instruments. In an SBL system,
three
or more transceivers are installed on the hull of a ship or a surface platform as shown in Fig.
2.4. A transponder is attached to the submersible to be positioned. One of the transceivers
sends out an acoustic signal. The transponder responds to it with another acoustic signal on a
different frequency. This signal is
received by the transceiver
array. The two–way time of-flight from
the transponder to the transceiver array
is measured and converted into

slant range if the sound speed at the site is known. The submersible’s position is obtained by
using the trilateration method. The SBL positioning accuracy improves with the operating
range and the spacing between the transceivers on the surface platform. Thus, where space
permits, such as when operating from larger vessels or a dock, the SBL system can achieve a
precision and position robustness that is similar to that of seafloor mounted LBL systems,
making the system suitable for high-accuracy survey work.
Fig. 2.4 SBL positioning system
As compared to LBL systems, the low system complexity makes SBL easy to use. It is a ship
based system so there is no need to deploy transponders on the seafloor, which saves time
and money. SBL systems are mainly used to track a submersible with respect to a surface
platform such as an oil drilling platform. SBL system also can be used for searching a
crashed airplane in the sea.
2.5.3 Ultra Short Baseline (USBL) Positioning Systems
Ultra Short Base Line system (USBL) is sometimes called Super Short Base Line
(SSBL) system. Similar to the SBL system, an array of transceivers (three or more) is fixed to
a surface vessel. A transponder is attached to a submerged target, which could be an ROV, an
AUV, a crawler or a diver as shown in Fig. 2.5. An acoustic pulse is transmitted by the

transceiver and detected by the transponder on the target, which replies with its own acoustic
pulse. This return pulse is detected by the shipboard transceivers array. The time from the
transmission of the initial acoustic pulse until the reply is detected is measured and converted
into a range. Instead of using the trilateration to calculate a subsea position, the USBL
measures both the range and the angle from the subsea target to the transceiver array. The
distance from the transceiver to the target, r, is the amplitude of the target vector. It is
obtained by measuring the time of arrival, as in LBL and SBL systems. The Cartesian
coordinates (x, y, z) of the target (Fig 2.6) are given by:
cossinrx
(2.5)
sinsinry
(2.6)
cosry
(2.7)
Fig. 2.5 USBL positioning system
z

Fig. 2.6 USBL range and angle measurements
The transceivers in a USBL system are typically built into a single assembly in close
proximity, which makes USBL systems more compatible and easy to deploy. It has better
performance within short range or in shallow water. The positioning performance depends on
the accuracy of additional sensors for vessel self-motions.
2.5.4 Common Issues Associated with Acoustic Positioning Systems
The major problems associated with the commercially available underwater acoustic
positioning systems include positioning accuracy, system complexity and cost. Acoustic
positioning systems can yield an accuracy of a few centimetres to tens of meters and can be
used over operating distances of tens of meters to tens of kilometres. Performance depends
strongly on the type and model of the positioning system, its configuration for a particular
job, and the characteristics of the underwater acoustic environment at the work site. Factors
that reduce the system performance include sound velocity variations, noise, multipath, and
the inhomogeneities of the sea water. The sound speed in water is a function of water
temperature, salinity and depth and the variations in sound speed will bring a systematic

error. The sound speed must be monitored in different areas and at different times throughout
the positioning task within the required accuracy of the survey to maintain the positioning
accuracy. Another factor that reduces the positioning accuracy in underwater is the multipath
interferences.
The conventional systems usually involve a surface ship and multiple transducers.
This type of configuration is not economic for long term observations of underwater activities
such as the monitoring of the marine habitat at a certain spot. The costs of individual
equipments, plus the expense on system components deployment in each of the research trial,
should also be taken into account. The absolute position of the target depends on additional
sensors like sonar.
2.6 Autonomous Underwater vehicle (AUV)
An Autonomous Underwater Vehicle (AUV) is a robot which travels underwater
without requiring input from an operator. In military applications AUVs are often referred to
as unmanned undersea vehicles (UUVs).
Once an AUV is deployed it drives around by gathering different kinds of sensor
measurements. In order to make any sense of these measurements, the AUV has to be able to
keep a track of where the measurements were made. Also to make a successful survey it is
necessary to be able to direct the vehicle to a particular location and keep track of where it
has been with respect to the earth’s axis so that the data gathered by the AUV can be
associated to a particular X-Y location. This issue is a little easier to deal with using high
quality sensor maps of the area apriori.
This leads to the next type of navigation, which involves building a map starting from a
known point, while using it to navigate and at the same time updating the map using the new
sensor data available. In the underwater environment the navigation problem is further
complicated by the fact that EM waves attenuate very quickly. Even in optimal conditions the
optical data would be limited to a few meters.
The traditional methods for navigation are underwater acoustic positioning systems. The LBL
setup under optimal condition can provide highly accurate position fixes for the AUV which
means it can accurately keep a track of the AUV during the survey. The limitation of the LBL
navigation is that acoustic waves have a significant travel time in water which means that the
frequency of the LBL fixes is highly limited .Also another problem with these systems are the
false returns received by the transducers when the acoustic waves bounce off the surface,
seafloor or other reflecting thermal layers. Even though LBL systems can be very efficient
for doing detailed surveys of a small area, it requires a lot of ship time to setup and deploy
which makes it inconvenient and expensive for large area surveys. Similarly the USBL
systems can be used with a reasonable level of accuracy, but nowhere near to that of the LBL
systems. Other disadvantages of the USBL system are that they need to be calibrated well to
get a reasonable accuracy and the USBL system relies on data from other sensors like the
gyro and depth sensor to get a reliable absolute positioning. Though USBL systems are not
very accurate on their own, they can be used along with dead reckoning to provide reasonably
high accuracy. Thus, the USBL systems can be used for basic navigation of the AUV, but do
not meet the requirements for the high accuracy needs of the surveying AUVs. All the above
discussed methods do not meet the requirements for the high accuracy needs of the surveying
AUVs which leads to searching for another source energy for underwater navigation.
The choice of energy to be used for underwater detection is determined by three factors:
i) Range of penetration in the medium.
ii) Ability to differentiate between various objects in the medium.
iii) Speed of propagation.

Of all the known physical phenomena, light has excellent differentiation ability and high
speed of transmission, but its range in water is very limited, on the order of tens of meters,
thereby restricting its operational usefulness. Radio frequency waves also can propagate with
extreme rapidity and to larger distances through space or transmission medium, but sea water
is essentially impervious to them for most frequencies. VLF signals will penetrate only about
10 meters therefore it is insufficient for normal surveillance whereas acoustic energy is
capable of being transmitted through the sea to larger distances that are operationally
significant. Because of this, sound/ underwater energy is used for antisubmarine warfare,
underwater communications, and underwater navigation. The acoustic energy too has
significant limitations and they must be thoroughly understood by the operators of
underwater sound equipment. The optimum use of sound requires a thorough understanding
of its limitations so that these effects can be minimized. For example, sea water is not
uniform in terms of pressure, temperature, and salinity and all these characteristics have
important effects on sound propagation through the sea.
Avoiding collision of the AUV with the floating or fixed objects in the underwater scenario
needs either prior knowledge of the operating environment or sensing equipment for
evaluating the environment in real time. Having prior knowledge is not feasible for
unstructured environments and therefore sensing equipment must be used for executing the
second approach. AUVs carry sensors to navigate autonomously and map features of the
ocean. There are a few sensors that are available to overcome these issues. Sonar is a
sensor/technique that uses sound propagation, mounted onto the AUVs to navigate,
communicate with or detect underwater mines (Meyroqitz A. L. et al, 1996; Dong-Hoon
Yang, 2006).
2.7 Sonar Operating Principle
Sonar refers to the application of sound for the detection and location of underwater
objects. Sonar is the most successful method used for detecting the presence of objects
underwater. The simplest sonar devices send out a sound pulse from a transducer and then
precisely measure the time it takes for the sound pulses to reflect back to the transducer. The
distance to an object can be calculated using this time difference and the speed of sound in
the medium. This principle of operation of the sonar is shown in Fig. 2.7.
Fig. 2.7 Principle of operation of sonar
There are two types of the sonar: passive sonar and active sonar.
Passive Sonar
Passive sonar is a listening device; the sound waves produced by another source such
as ships, biological creatures or due to seismic activities are received by the sonar’s receiver
and changed into electrical signals for analysis and also for display on a monitor. Since the
frequencies emitted by the various sources are different, it is sufficient to receive these
frequencies in order to identify the source. The direction of the source can also be found out
either by beam forming method or through the triangulation method by having the
measurements at different places. This will not be dealt here in detail as the aim of the
research is related to the imaging sonars which are active.
Active Sonar
Active sonar is the one which sends the signals and receives the echo. Active sonar
uses a transducer which converts electrical signal to sound waves. These sound waves are

reflected back from the target and detected by the sonar’s receiver as an echo. The receiver
passes sound waves to the transducer which converts the sound back to electrical signals.
Since the speed of the sound in water is known, the range and the bearing of the target can be
determined. This method is also known as echo-ranging. The block diagram of active sonar is
shown in Fig. 2.8.
Fig. 2.8 Block diagram of active sonar
2.8 Sound Propagation in Underwater Medium
The basic theory of acoustics involves the study of vibration, waves and their
propagation. If the direction of particle vibration is the same as the direction of wave
propagation, then the wave is called a longitudinal wave. If the direction of particle vibration
Target
Echo
Transmitted
Sound wave
time
Transducers
Vibration
Voltage
Oscillation
TRANSDUCER
TRANSMITTER RECEIVER
Display

is perpendicular to the direction of wave propagation, then the wave is called a transversal
wave. When a sound wave propagates in sea water, the structure of the water medium is
changed, resulting in the spread of sound energy. The sensing of an underwater receiver for
sound pressure is based on this sound pressure change. In the wave propagation process,
particles in the sea water do not move from one place to another, but only vibrate around
some fixed point. The acceleration speed of a particle is always proportional to the distance
from a fixed point. This kind of motion is called resonance motion. It is the simplest form of
periodic motion (Qihu Li., 2012). The expression of a one-dimensional differential equation
of resonance motion is
02
2
2
xwdt
xd
(2.8)
The solution of this equation is
x(t) = A sin(ωt) + B cos( ωt)
(2.9)
Where A, B are arbitrary constants and ω=2πf is the cycle frequency with unit rad/s, and the
unit of f is Hz.
2.8.1 Velocity of sound wave
Sound travels more slowly in fresh water than in sea water. The speed of sound is determined
by the water's bulk modulus and mass density. The bulk modulus is affected by temperature,
dissolved impurities (usually salinity), and pressure. The density effect is small. The speed of
sound (in feet per second) is approximately:
4388 + (11.25 × temperature (in °F)) + (0.0182 × depth (in feet)) + salinity (in parts-per-
thousand)
This empirically derived approximation equation is reasonably accurate for normal

temperatures, concentrations of salinity and the range of most ocean depths. Ocean
temperature varies with depth, but at between 30 and 100 meters there is often a marked
change, called the thermocline, dividing the warmer surface water from the cold, still waters
that make up the rest of the ocean. The sonar may not produce the desired result as the sound
originating on one side of the thermocline tends to be bent, or refracted, through the
thermocline. The thermocline may be present in shallower coastal waters. However, wave
action will often mix the water column and eliminate the thermocline. Water pressure also
affects sound propagation: higher pressure increases the sound speed, which causes the sound
waves to refract away from the area of higher sound speed. The mathematical model of
refraction is called Snell's law.
The propagation velocity c of sound in the sea can be derived from the following adiabatic
equation
aK
pc
1
(2.10)
where, p is the sound pressure, ρ is the density of water, and Ka is the adiabatic compression
coefficient. In sea water, since pKa is a function of temperature, salinity and pressure, the
sound speed in sea water is also a function of temperature, salinity and pressure, but
temperature is the dominant factor. In fresh water, the empirical formula for calculating
sound speed is generally
c=1410+4.21t-0.037t2+0.018d (m/s)
(2.11)
where, t is the temperature of sea water in 0C; d is the depth (m). c ≈1,500 m/s, for t = 20
0C.
The empirical formula for calculating sound speed in sea water is given by
c=1410+4.21t-0.037t2+1.1S+ 0.018 d(m/s)

(2.12)
where S is the salinity (%). C ≈1,500 m/ s when t = 14°C, S = 34.5, d = 15m.
Because the propagation characteristics of sound in the sea strongly depend on the
sound speed, it is very important to understand the distribution of sound speed for any
specific area. The relation between sound speed and depth is called the sound speed profile
(SSP). The SSP is related to the latitude, season, and day /night.
2.8.2 Sound pressure and sound power
"Sound power" and "Sound pressure" are two distinct and commonly confused
characteristics of sound. Sound power or acoustic power is a measure of the total sound
power emitted by a source in all directions in watts (joules per second) per unit time t. Sound
power levels are connected to the sound source and are independent of distance. Sound power
levels are indicated in decibel as follows
o
wI
IL 10log10
(2.13)
where sound power Io is chosen to be a reference sound power, define it as 0 dB, and then
any other sound power I has the dB value of 20log I/Io dB with respect to reference level.
Sound pressure is a pressure disturbance in the air whose intensity is influenced not only by
the strength of the source, but also by the surroundings and the distance from the source to
the receiver and diminishes as a result of intervening obstacles and barriers, air absorption,
wind and other factors. Sound pressure levels quantify in decibels and the intensity of given
sound sources are indicated in decibels.
Sound pressure level (SPL) o
pP
PL 10log10
(2.14)
Where sound pressure Po is chosen to be a reference sound pressure, define it as 0 dB, and

then any other sound pressure P has the dB value of 20log P/Po dB.
A frequently used method of estimating the sound power level at a source Lwis to measure the
sound pressure level Lp at some distance r, and solve for Lw. If the source is in free space
2104
1log10
rLL pw
(2.15)
or if the source is on the floor or on a wall, such that it radiates into a half sphere.
2104
2log10
rLL pw
(2.16)
2.8.3 Transmission loss of sound in underwater
Transmission Loss is the parameter that compares the amount of intensity of the signal at a
specific range from the source to the source intensity at one yard. The equation for this would
be:
)(
)1(log10
rI
ydITL
(2.17)
In sonar equations, transmission loss TL is an important parameter in sonar design because
the performance of a sonar system depends only on the transmission loss. When a sound
wave propagates in an ocean environment, the sound intensity will gradually decrease with
travel distance, because of the following reasons:
i) The geometrical spread of the wave front, spherical or cylindrical spreading,
ii) The loss of the sound wave at the sea surface and the sea floor,
iii) Sound absorption,
iv) Sound reflection.
Spreading and Cylindrical Losses

Sound waves while propagating underwater they get attenuated due to cylindrical and
spherical spreading of the energy. Cylindrical spreading presents underwater only when the
sea surface and the sea floor are flat. However spherical spreading presents underwater in all
kinds of sea environment. The transmission loss increases linearly in both spherical and
cylindrical spreading and the transmission loss due to spherical spreading is twice the
transmission loss due to cylindrical spreading.
2.8.3.1 Spreading Loss
Let’s assume a point source which emits a signal in all directions (that is in three
dimensions). The source would produce wave fronts that were spheres that would grow in
size as the wave propagates away from the source as shown in Fig 2.9.
Fig. 2.9 Spherical spread
rTL log20
(2.18)
The above equation is for transmission loss only due to spherical spreading. In this case, from
1 m to 100 m, the intensity of the sound wave will attenuate by 40 dB. Spherical spreading is
the most dominant factor in the transmission loss portion of the passive sonar equation. As
the range increases the transmission loss increases linearly as shown in Fig 2.10 and the
corresponding values are given in Table 2.1.
4 R2
R

10-3
10-2
10-1
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
Range(km)
transm
issio
nlo
ss(d
B)
Fig. 2.10 Typical transmission loss curve of band limited signal
Table 2.1 Range prediction by calculation
of transmission loss for spherical spread
2.8.3.2 Cylindrical Spreading
In the propagation of a sound wave, if the sea
surface and sea floor are relatively flat, sound
reflection and absorption are negligible, so the
spread of a sound wave can be considered as cylindrical (Fig. 2.11). The transmission loss is
proportional to the distance R. As the range increases the transmission loss increases linearly
as shown in Fig 2.12 and the corresponding values are given in Table 2.2.
Range(m) Transmission loss(dB)
1 -138.1
5 -105.9
10 -92.1
20 -78.2
50 -59.9
70 -53.1
100 -46.0

10-1
100
101
102
-100
-90
-80
-70
-60
-50
-40
-30
-20
. The transmission loss due to cylindrical spreading is half of the spherical spreading.
Fig 2.11 Cylindrical spread
TL(R) = 101ogR
(2.19)
Fig. 2.12 Typical transmission loss curve of band limited signal
Range(m) Transmission loss(dB)
1 -69.0
5 -52.9
10 -46.0
20 -39.1
50 -29.9
70 -26.5
2 R2
R
h
Source
Range (km)
Tra
nsm
issi
on
lo
ss (
dB
)

100 -23.0
Table 2.2 Range prediction by calculation of transmission loss for cylindrical spread
The only limitation of this equation is that it does not take into account the spreading of the
wave spherically until it reaches the “transition range” where the wave starts to spread
cylindrically.
2.8.4 Sound absorption in underwater
Sound absorption in sea water is one of the important characteristics of an acoustic
channel. This is because, as the information carrier, in the propagation of a sound wave,
energy dissipation is the main characteristic of a channel. Sea water is not an ideal medium
for sound transmission. The absorption of sound in seawater forms part of the total
transmission loss of sound from a source to a receiver. It depends on the seawater properties,
such as temperature, salinity and acidity as well as the frequency of the sound. Absorption is
the conversion of acoustic energy to heat in the fluid. There are three main causes of
absorption losses:
i. Viscosity
ii. Change in molecular structure
iii. Heat conduction
Attenuation losses in sea water occur from both sound absorption losses and scattering losses.
This attenuation causes a decrease in the amplitude of the wave and an exponential decrease
in the acoustics pressure resulting in more spreading loss. To account for attenuation in the
transmission loss equation, a new term, α must be defined, the attenuation coefficient. Using
this new term, the transmission loss can be calculated using the equation:
dBydrTL nattenuatio
310))1((
(2.20)
where r is in yards. Generally, since the range, r, is usually much greater than 1 yard, we can

ignore the -1yard term in the equation. Thus the transmission loss can be expressed as:
dBrTL nattenuatio )10( 3
(2.21)
The most difficult problem in the transmission loss is to determine a correct value for α, i.e.,
the attenuation coefficient and the various factors that affect the attenuation coefficient are
given below.
i) Viscosity
The viscosity losses are due to two distinct effects. Each of these effects is dependent on not
only how the molecules act together in the medium as defined by the coefficients of both
shear and volume viscosity but also the frequency of the sound waves.
When both terms are combined and nominal values used for the density, speed of
sound and the coefficients, the value for the attenuation coefficient becomes
241075.2 f
(2.22)
where f is the sound wave frequency in kHz.
ii) Ionic Relaxation
The below equation describes how Ionic Relaxation affects the attenuation coefficient is
24
4100
40
f
fMgSO
(2.23)
where frequency, f, is in kHz.
Though many factors affect this complex process, simply suffice it to say that an equation for
this process’ affect on α would be
2
2
1
1.0
f
fborateboron

(2.24)
iii) A non-absorption factor, scattering
The last factor that contributes to losses is the scattering of sound energy due to in
homogeneities in seawater. This factor can be approximate as a constant, not dependant on
frequency and would only be a dominant factor below 100 Hz or so. This can be expressed as
kyddBscattering /003.0
(2.25)
When all these factors are combined, the equation for transmission loss then becomes:
dBrTL )10( 3
(2.26)
where
24
2
2
2
2
1075.24100
40
1
1.0003.0 f
f
f
f
fdB/kyd
(2.27)
The unit dB / ky can be converted to dB / km by multiplying with a factor of 1.094 then
absorption coefficient can be written as
)/(094.1 0 kmdB
(2.28)
The characteristics of absorption of sound in water is shown in Fig. 2.13 and corresponding
values are given in Table 2.3

Fig. 2.13 Absorption of sound in sea water
Table 2.3 Variation of absorption coefficient with frequency
2.9 Description of terms used in Sonar equations
The sonar equation is based on a basic equality between the desired and undesired
parts of the received signal at the instant the desired function of the sonar has been achieved.
These functions could be detection of an underwater target or detection of any other source
produced by the acoustic activities. These functions involve the reception of the acoustic
signals occurring in a natural acoustic noise background. Of the combined received acoustic
signal at the receiver, the desired portion is called the signal and the rest is called noise which
Frequency(kHz) Absorption coefficient(dB)
0.1 1.1114e-004
0.5 0.0025
1.0 0.0086
2.0 0.0217
3.0 0.0302
4.0 0.0349

is undesired. In sonar the background is either noise, which is essentially a portion not due to
one’s own sonar, or reverberation, the slowly delayed portion of the background representing
the return of one’s own acoustic output by scatters in the medium. For better performance of
the sonar, the overall response of the system to the signal is increased and its response to the
background is decreased. A signal is said to be detected when its level equals the level of the
background noise.
Signal level = background noise level
The equality mentioned exists only at one instant in time, as the target approaches or recedes
from the sonar receiver. At short ranges, its signal will exceed the background noise level but
at long ranges, the reverse will occur. The basic equations can be expanded in term of various
parameters. These parameters are attributed to the equipment, the medium, and the target.
These parameters are expressed in terms of decibel. These are expressed as follows:
The Equipment
Projector Source Level: SL
Self-Noise Level: NL
Receiving Directivity Index: DI
Detection Threshold: DT
The Medium
Transmission Loss: TL
Reverberation Level: RL
Ambient-Noise Level: NL
The Target
Target Strength: TS
Target Source Level: SL

In subsequent paragraphs these are explained in further detail.
i) Projector Source Level (SL)
Source level is defined differently for active and passive sonar equations. For the
active sonar equations, it is the sound pressure level of the actively transmitting sonar,
measured (or referenced to) one yard from the transducer. For the passive sonar equation, the
source level is the measure of the noise generated by the object at specific frequencies and is
also referenced to one yard from the sound source.
ii) Receiving Directivity Index (DI)
Directivity index indicates the amount by which sonar uses its directional beam
forming capability by discriminating omni directional noise from a directional signal. The
directivity index is a function of the sonar's design and the received frequency only.
Directivity index is the measure of the amount by which a given sonar system can filter out
background noise by using its directional beam forming capability. The value for the
directivity index for a specific system will always be a positive value.
iii) Detection Threshold (DT)
Detection threshold is the signal-to-noise ratio required for a 50% probability of
detection (POD) of the object. The value of the detection threshold for a specific operator will
always be a negative number. DT is the means to account the ability of a sonar to detect
object noise which in most cases is more than the surrounding noise.
iv) Transmission Loss (TL)
Transmission loss is defined by the decrease in acoustic intensity of an acoustic
pressure wave propagating outwards from a source. As the acoustic wave propagates
outwards from the source, the intensity of the signal is reduced with increasing range due to
spreading and attenuation.

v) Self Noise level (NL), Reverberation Level (RL), and Ambient-Noise Level (NL)
The noise which is present in a medium and which sonar has to overcome to detect an
object is represented by the noise level (NL) term. NL is actually a combination of several
terms. In the passive sonar equation, NL is the summation of two noise sources: self noise
(SN) and ambient noise (AN). In the active sonar equations, NL is either the summation of
SN + AN, identical to the passive sonar equations, or it is the amount of measured
reverberation (RL). It is this difference in NL terms that gives rise to the two active sonar
equations; one with self noise/ambient noise and one with reverberation as the noise level
term. Normally these noise levels and measurements are omni directional (all directions) in
nature.
vi) Target Strength (TS)
Target strength applies to the active sonar equation only. This term is added to the
source level term and accounts for the sound energy that reflects off an object. Specifically,
TS is the ratio of incident sound energy to reflected sound energy. It is dependent upon the
cross-sectional area from which the sound wave-front reflects (target aspect) and the object
material or geometry. Table 2.4 summarizes the parameters discussed above.
S.
No
Parameters Symb
ols
Reference
Location
Definitions
1 Source Level SL 1 yard from
the source on
its acoustic
axis

2 Transmission
Loss
TL 1 yard from
the source at
the target/
receiver
3 Target
Strength
TS 1 yard from
the acoustic
center of the
target
4 Noise Level NL At hydrophone
location
5 Directivity
Index
DI At hydrophone
terminal
6 Reverberatio
n Level
RL At hydrophone
terminal
7 Detection
Threshold
DT At hydrophone
terminal
Table 2.4 Sonar parameters and their definitions
2.9.1 Source level and spectrum level
In the active sonar equation, the source level is no longer the level of the contact or
target, but rather the source level of the projector from the active sonar system. This source
level is the level (in dB re 1μPa) of the projector, 1 yard from the projector.
To solve for the source level, start with the definition of passive source level:

ref
yd
I
ISL
1log10
(2.29)
Substituting in the equation for intensity:
ydat
rms
ydArea
Pwr
c
PI
1
2
1
(2.30)
Where Area at 1 yd = 4π (1 yd)2
By substituting the nominal values for the density and speed of sound of seawater
(ρSW=1000 kg/m3 and cSW=1500 m/s), knowing pref=1μPa and converting yards to meters
then get
refref Pyd
cPwr
cP
ydPwr
SL22 2)1(4
.log10
2)1(4log10
(2.31)
dBPwrSL 5.171)log(10
(2.32)
Within the sonar system, there is an efficiency at converting the electrical input power to the
acoustical output power and this can further modify the results as
Pwracoustic=PE.E
Where, E is system efficiency thus:
).log(105.171 EPdBSL E
EPdBSL E log10log105.171
(2.33)
Spectrum level

The spectrum level is the intensity level of the sound wave within a 1 Hz band.
2.9.2 Relation between source level and spectrum level
Source level is sound pressure or sound intensity per unit area, received at a distance of 1 m
from a sound source. In the sound spectrum, the sound level is actually the sound energy in a
certain frequency band. Suppose the power spectrum of sound signal x(t) is Kx(f) and the unit
is Pa2I Hz or bar
2I Hz, then the sound energy in the band [W1,W2] is
(2.34)
(2.35)
SL is called the dB value of a sound level and fK is called the spectrum level and
expressed as
)(log20)( fKfSPL x
(2.36)
A simplified, but not accurate method, to find SL from SPL(f) is
]log[10)( 12 WWfSPLSL o
(2.37)
where fo is some value between W1 and W2 .Sometimes 2
21 WWfo
or 21WWfo
,is an
acceptable choice. A typical signal spectrum is shown in Fig. 2.14 and the corresponding
values are given in Table 2.5.
.
ref ref
I in 1 Hz band I in 1 Hz band 1HzISL 10log 10log
I in 1 Hz band I
oSLSL log10
dffKSL x )(0

10-1
100
101
102
60
80
100
120
140
160
180
Frequency(Hz)
spectr
um
level(dB
)
Fig. 2.14 Typical signal spectrum of sound
Frequency (Hz) Spectrum level(dB)
0.1 168.1
1 129.0
10 89.8
20 78.0
30 71.1
50 62.4
Table 2.5 Variation of signal spectrum level with frequency
2.10 Development of Sonar equation
Consider a sound source acting as a receiver (a transducer) that produces a source level of SL
decibels at a unit distance (1 yd) on its axis. When the radiated sound reaches the target (if
the axis of the sound points towards the target), its transmission will be reduced by the
transmission loss, and becomes SL–TL. The quantities indicated in the equations are
logarithmic. Therefore the signs in the equation, ‘+’ (plus) indicates Multiplication and ‘-’
(minus) indicates Division. On scattering or reflection by the target of target strength TS, the
reflected or the backscattered level will be SL–TL+TS at a distance of 1 yd from the acoustic
centre of the target in the direction back towards the source. In travelling back toward the
source, this level is again attenuated by the transmission loss and becomes SL–2TL+TS. This
is the echo level at the transducer. Assuming that the background noise is isotropic noise
rather than reverberation, the background level becomes NL. This level is reduced by the
directivity index of the transducer acting as receiver or hydrophone so that at the terminal of
the transducer the relative noise power is NL–DI. Since the axis of the transducer is pointing
in the direction from which the echo is coming, the relative echo power is unaffected by the
transducer directivity. At the transducer terminals, the echo-to-noise ratio is
SL–2TL+TS–(NL–DI)
When the input signal-to-noise ratio is above a certain detection threshold fulfilling certain
probability criteria, a decision is made that target is present. When the input signal-to-noise
ratio is less than the detection threshold, then target is absent. When the target is just
detected, the signal-to-noise ratio equals the detection threshold, and the equation becomes
SL–2TL+TS–(NL–DI) = DT
The above equation is an active sonar equation in terms of the detection threshold, also called
recognition differential. In terms of the basic equality described it could be considered that
only that part of noise power lying above the detection threshold level mask the echo, and the
equation therefore becomes
SL–2TL+TS=NL–DI+DT
This is a more convenient arrangement of the parameters, since the echo level occurs on the
left-hand side, and the noise-masking background level occurs on the right. This is the active
sonar equation for the mono-static case in which the source and the receiving hydrophones

are coincident and in which the acoustic return of the target is back towards the source. In
some sonars, a separate source and receiver are employed and the arrangement is said to be
bi-static, in this case the two transmission losses to and from the target are not the same. Also
in some sonar it is not possible to distinguish between DI and DT, and it becomes equal to
DI–DT as the increase in signal-to-background ratio produced by the entire receiving system
of transducer, electronics, display, and observer. When the background noise is due to
reverberation, the parameter DI, defined in terms of an isotropic background, is inappropriate.
For a reverberation background the term NL–DI is replaced by an equivalent plane wave
reverberation level RL observed at the hydrophone terminals (Urick R. J., 1983). The active
sonar equation then becomes
SL–2TL+TS=RL+DT
There are separate names for different combinations of the terms in the sonar equations which
are given in Table 2.6.
S. No. Terms Definitions
1 Echo level SL-2TL+TS
2 Noise masking level NL-DI+DT
3 Reverberation level RL+DT
4 Echo excess SL-2TL+TS-(NS-DI+DT)
5 Performance figure SL-(NL-DI)
6 Figure of merit SL-(NL-DI+DT)
Table 2.6 List of names for different combination of terms
The Figure of merit (FOM) given in the above table is very important, because it combines
together the various equipment and the target parameters so as to yield a quantity significant
for the performance of the sonar. Since it equals the transmission loss at the instant when the
sonar equation is satisfied, the FOM gives an intermediate indication of the range at which
sonar can detect its target, or more generally, perform its function. However, when the

background is reverberation instead of the noise, the figure of merit is not constant, but varies
with range and so fails to be a useful indicator of the sonar performance. While the Figure of
Merit is the calculated sum of the sonar equation terms, and is defined by the maximum loss a
signal can suffer and still be detected 50% of the time. The FOM definition forms the basis
for sonar range prediction; where the FOM value equals the propagation loss; there is a 50%
probability of detection. In the case of active sonar range prediction, Active Figure of Merit
(AFOM) is used and The TL term is doubled when calculating AFOM due to two-way sound
travel.
Transient form of the Sonar equations
The equations discussed so far have been written in terms of intensity, or the average
acoustic power per unit area of the sound emitted by the source or received from the target.
The word average implies a time interval over which the average is to be taken. The time
interval causes uncertain results for short transient sources or generally, whenever severe
distortion is introduced by propagation in the medium or by scattering from the target. A
more general approach is to write the equations in terms of energy flux density defined as the
acoustic wave using a time-varying pressure p(t); then the energy flux of the wave is
(2.38) The units of pressure are dynes per square centimeter and the acoustic impedance of
the medium is ergs (for water, ρc≈1.5x105), then E is expressed in ergs per square centimeter.
The intensity is the mean square pressure of the wave divided by ρc and averaged over an
interval of time T, or
(2.39)
So that over the time interval T,

(2.40)
The quantity T is the time interval over which the flux density of an acoustic wave is to be
averaged to form the intensity. For long pulse active sonar, this time interval is the duration
of the emitted pulse and is very nearly equal to the duration of the echo. For short transient
sonars, however, the interval T is often ambiguous, and the duration of the echo is vastly
different from the duration of the transient emitted from the source. Under these conditions, it
can be shown that the intensity from the sonar equations can be used, provided that the source
level is defined as (Waite A. D. 2002):
SL=10 log (E) – 10 log (re)
(2.41) here E is the energy flux density of the source at 1 yd and is measured in units
of the energy flux density of a 1 μPa plane wave taken over an interval of a 1 second and re is
the duration of the echo in seconds for an active sonar depth. For pulsed sonar’s emitting a
flat topped pulse of constant source level SL over a time interval ro then,
10 log (E) = SL’+ 10 log(ro)
(2.42) Since the energy density of a pulse is the product of the average intensity
times its duration, by combining the best two equations, the effective source level SL for use
in the sonar equations is therefore:
(2.43)
where,
ro= duration of the emitted pulse of the source level SL′ and
re= echo duration.
For long-pulsed sonar, ro=re and SL=SL′ . For short- pulsed sonar’s, re >ro and the

effective source level SL is less than SL′ by the amount . A short pulse of duration ro
and source level SL΄ is replaced in a sonar calculation by an effective or equivalent pulse of
longer duration re and lower source level SL. The two source levels are related so as to keep
the energy flux-density source level the same, namely:
SL+10log re = SL’ + 10log ro or
(2.44) In effect, the pulse emitted by the sonar is stretched out in time and thereby reduced in
level by multi path propagation and by target reflection. The echo duration can be conceived
as consisting of three components: ro, the duration of the emitted pulse measured near the
source; rm, the additional duration imposed by the two way propagation in the medium; and
rt, the additional duration imposed by the extension in range of target. So the echo duration is
the sum of the three components:
(2.45)
Applications of sonar equations
Sonar equations serve two important practical functions
i) The first is the prediction of the performance of sonar equipment of known design. In
this application, the design characteristics of the sonar are known or assumed and
what is desired is an estimate of the performance in terms of detection probability or
search rate. This is done by a prediction of range through the parameter transmission
loss. The equations are solved for transmission loss, which is then converted to range
through some assumption concerning the propagation characteristics of the medium.
ii) Another application is sonar design. It is used where a pre-established range is
required for the operation of the equipment being designed. In this case the equations
are solved for the particular parameter of interest.

2.10.1 Limitations of the Sonar equations
Sonar equations have the following limitations.
i) The sonar equations written in terms of intensities are not always complete for some
types of sonars. Short-pulse sonar requires the addition of another term, the echo
duration, to account for the time stretching produces by multi path propagation.
Another such addition is a correlation loss in correlation sonars to account for the
decor-relation of the signal that may occur due to bottom reflection or scattering in
bottom-bounce sonars.
ii) A limitation of another kind is produced by the nature of the medium in which sonar
operates. If the medium is moving and contains in-homogeneities such as irregular
boundaries, then many sonar parameters fluctuate irregularly with time, while others
change because of the unknown changes in the equipment and the platform on which
it is mounted.
iii) Because of these fluctuations, solution to the sonar equations is no more than a best
guess time average of what is to be expected in a basically stochastic problem.
Precise calculations, to tenths of a decibel, are futile a predicted sonar range is an average
quantity about which the observed values of range are likely to congregate. Underwater
sound and its fluctuations, improve the accuracy of the predictions of the sonar equation can
be expected to increase.
2.11 Conclusions
In this chapter various terrestrial, satellite and underwater navigation techniques are
discussed. Unlike radar which is based on radio communication principle, sonar is the means
of ultrasonic communication in underwater. This is because sea water conducts electricity
pretty well, and anything that conducts electricity will absorb the electromagnetic energy of
the radar and not allow it to penetrate. The dielectric constant of water is not good for RF

propagation. However water is good for propagating sound wave though it propagates much
slower than the RF waves. The distance that sound waves (which is a pressure waves) travel
is vastly longer than Radio Waves in water. For this reason sonar is used in place of radar in
underwater medium. In underwater medium the propagation of sound is effected by
characteristics such as velocity of sound wave, sound pressure and sound power, transmission
loss of sound in underwater environment, sound absorption in sea water, viscosity, ionic
relaxation and scattering. Sound waves while propagating underwater they get attenuated due
to cylindrical and spherical spreading of the energy. Cylindrical spreading presents
underwater only when the sea surface and the sea floor are flat. The transmission loss
increases linearly in both spherical and cylindrical spreading and the transmission loss due to
spherical spreading is twice the transmission loss due to cylindrical spreading. For example
the transmission loss due to spherical spreading and cylindrical spreading at 100 m range are
-46.0 dB and -23.0 dB respectively. The performance of the sonar is determined by the range
covered by it and is obtained from the sonar range equation. The sonar range equation is
affected by various parameters and the same has been discussed in this chapter. Finally the
applications and limitations of the sonar range equation have also been brought out.