chapter 1 random process - 國立臺灣大學cc.ee.ntu.edu.tw/~wujsh/10101pc/chapter1.pdfchapter 1...
TRANSCRIPT

Chapter 1 Random Process
1
1.0“Probabilities”is considered an important background for analysis and design of communications systems 1.1 Introduction (Physical phenomenon) Deterministic model : No uncertainty about its time- dependent behavior at any instant of time . (e.g. cos(wt)) Random model :The future value is subject to “chance” (probability) (e.g. cos(wt+θ), θis a random variable) ↑in the interval(-T,T) Example: Thermal noise , Random data stream
2012/9/10

1.1.1 Example of Stochastic Models
Channel noise and interference
Source of information, such as voice
2 2012/9/10

1.1.2 Relative Frequency
How to determine the probability of “head
appearance” for a coin?
† Answer: Relative frequency. Specifically, by
carrying out n coin-tossing experiments, the
relative frequency of head appearance is equal to
Nn(A)/n, where Nn(A) is
the number of head appearance in these n random
experiments.
3 2012/9/10

A1.1 Relative Frequency
Is relative frequency close to the true probability
(of head appearance)? „
It could occur that 4-out-of-10 tossing results
are “head” for a fair coin!
� Can one guarantee that the true “head appearance
probability” remains unchanged (i.e., time-
invariant) in each experiment (performed at
different time instance)?
4 2012/9/10

A1.1 Relative Frequency
Similarly, the previous question can be extended to
“In a communication system, can we estimate the
noise by repetitive measurements at consecutive
but different time instance?”
Some assumptions on the statistical models are
necessary!
5 2012/9/10
1.1.2 Axioms of Probability
Definition of a Probability System (S, F, P) (also
named Probability Space)
1.Sample space S „
All possible outcomes (sample points) of the experiment
2.Event space F „
Subset of sample space, which can be probabilistically
measured.
„ A∈ F and B ∈ F implies A∪B ∈ F.
3. Probability measure P
6 2012/9/10

1.1.2 Axioms of Probability
3. Probability measure P „
A probability measure satisfies:
† P(S) = 1 and P(EmptySet) = 0
For any A in F, 0 ≦ P(A) ≦ 1.
† For any two mutually exclusive events A
and B, P(A∪ B) = P(A) + P(B)
7 2012/9/10

1.1.2 Axioms of Probability
8 2012/9/10

1.1.3 Properties from Axioms
9 2012/9/10

1.1.4 Conditional Probability
10 2012/9/10

1.1.5 Random Variable
11 2012/9/10

1.1.5 Random Variable
12 2012/9/10

1.1.5 Random Variable
13 2012/9/10

1.1.5 Random Variable
14 2012/9/10

1.1.5 Random Variable
15 2012/9/10

1.1.6 Random Vector
16 2012/9/10

1.1.6 Random Vector
17 2012/9/10

1.1.6 Random Vector
18 2012/9/10

19
1.2 Mathematical Definition of a Random Process (RP)
The properties of RP
a. Function of time.
b. Random in the sense that before conducting an
experiment, not possible to define the waveform.
Sample space S function of time, X(t,s) (-T,T) mapping A random variable (r.v) is a real-valued function defined on the elements of the Sample space.
2012/9/10

20
(1.1)
2T:The total observation interval
(1.2)
= sample function λ←which is deterministic
At t = tk, the set{xj (tk) } constitutes a random
variable (RV).
To simplify the notation , let X(t,s) = X(t)
X(t):Random process, an ensemble of time functions
together with a probability rule.
Difference between RV and RP
RV: The outcome is mapped into a real number
RP: The outcome is mapped into a function of time
Tt-Tt,sX )( S
)(),( txstXs jjj
)(tx j
2012/9/10

21
Figure 1.1 An ensemble of sample functions:
Note:X(t1),X(t2)…X(tn) are statistically independent for any t1,t2 ,…, tn
},,2,1|)({ njtx j
2012/9/10

22
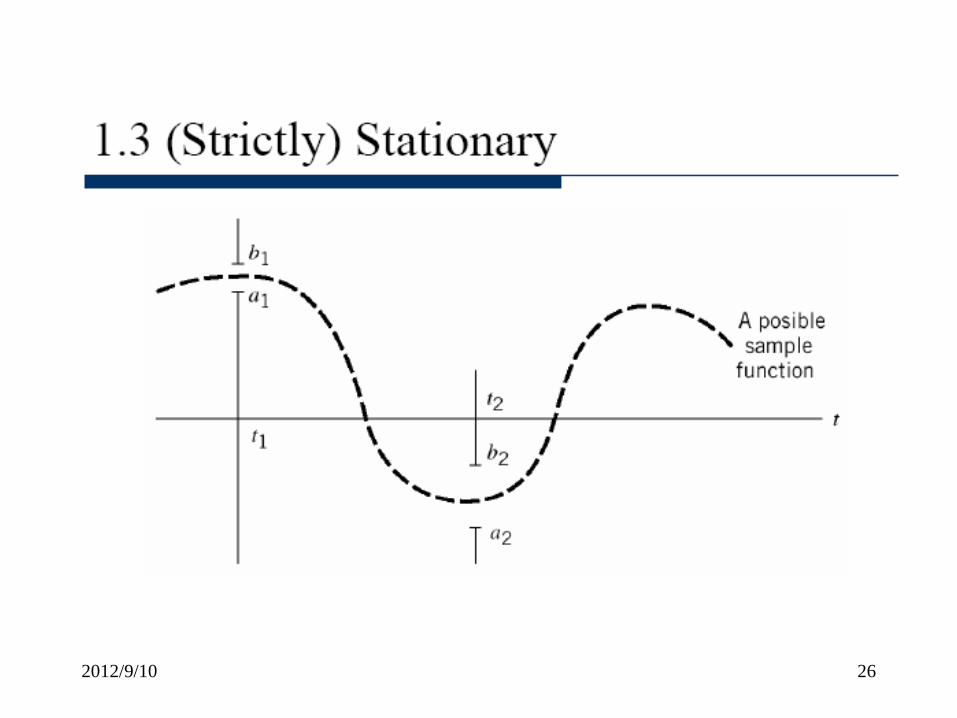
1.3 Stationary Process Stationary Process :
The statistical characterization of a process is independent of
the time at which observation of the process is initiated.
Nonstationary Process:
Not a stationary process (unstable phenomenon )
Consider X(t) which is initiated at t = ,
X(t1),X(t2)…,X(tk) denote the RV obtained at t1,t2…,tk
For the RP to be stationary in the strict sense (strictly stationary)
The joint distribution function independent of τ
(1.3)
For all time shift t, all k, and all possible choice of t1,t2…,tk
)...()..( ,)()(,,)(),...,( 11
11kk xxFxxF
kk t,...,XtXτtXτtX
2012/9/10

1.3 Random Process
23 2012/9/10

24
X(t) and Y(t) are jointly strictly stationary if the joint
finite-dimensional distribution of and
are invariant w.r.t. the origin t = 0.
Special cases of Eq.(1.3)
1. k = 1, for all t and t (1.4)
2. k = 2 , t = -t1
(1.5)
which only depends on t2-t1 (time difference)
)()( 1 ktXtX )()( 1 'tY'tY j
)(F)(F)(F )()( xxx XτtXtX
),(F),( 212 )((0),)(),( 121
21xxxxF ttXXtXtX
2012/9/10

1.3 Stationary
25 2012/9/10
26 2012/9/10

27 2012/9/10

1.3 (Strictly) Stationary
Why introducing “stationarity”?
With stationarity, we can certain that the
observations made at different time
instances have the same distributions!
28 2012/9/10

29
1.4 Mean, Correlation,and Covariance Function Let X(t) be a strictly stationary RP
The mean of X(t) is
(1.6)
(indep. of t) for all t (1.7)
fX(t)(x) : the first order pdf which is independent of time.
The autocorrelation function of X(t) is
for all t1 and t2 (1.8)
is the second order pdf
)()( tXEtX
xxxf tX d )(
)(
)(
),(
),(
)()( )(R
12
-
-2121)((0)21
-
-2121)()(21
2121
12
21
ttR
dxdxxxfxx
dxdxxxfxx
tXtXE,tt
X
ttXX
tXtX
X
X
1 2( ) ( ) 1 2( , )X t X t
f x x
stationary
2012/9/10

30
The autocovariance function
(1.10)
Which is of function of time difference (t2-t1).
We can determine CX(t1,t2) if X and RX(t2-t1) are known.
Note that:
1. X and RX(t2-t1) only provide a partial description.
2. If X(t) = X and RX(t1,t2)=RX(t2-t1),
then X(t) is wide-sense stationary (stationary process).
3. The class of strictly stationary processes with finite
second-order moments is a subclass of the class of all
stationary processes.
4. The first- and second-order moments may not exist.
)(
)()( )(C
2
12
2121
XX
XXX
ttR
tXtXE,tt
2
1 1( . . ( ) , )
1e g f x x
x
2012/9/10

1.4 Wide-Sense Stationary (WSS)
31 2012/9/10
1.4 Wide-Sense Stationary (WSS)
32 2012/9/10

1.4 Cyclostationarity
33 2012/9/10

34
Properties of the autocorrelation function
For convenience of notation , we redefine
1. The mean-square value
2.
3.
( ) ( ) ( )R x t x tt t
(1.11) allfor , )()()( ttXτtXERX t
(1.12) 0 τ , )((0) 2 tXERX
(1.13) τ)()( RRX t
(1.14) (0))( XX RR t
( ) ( )x x t t t
( )R t
2012/9/10

35
0)]([)]()([2)]([ 22 tXEtXtXEtXE tt
0)(2)0(2 tXX RR
)0()()0( XXX RRR t
0)(2)]([2 2 tXRtXE
)0(|)(| XX RR t
Proof of property 3:
0]))()([( Consider 2 tXτtXE
2012/9/10

36
The RX(t) provides the interdependence information
of two random variables obtained from X(t) at times
t seconds apart
2012/9/10

37
Example 1.2 (1.15)
(1.16)
(1.17)
Θ)2cos()( tπfAtX c
elsewhere,0
,2
1
)(πθπ
πf
f
θπ π
( ) cos( )2
2
( ) ( ) 2X c
AR E X t τ X t πft t
2012/9/10

38
Appendix 2.1 Fourier Transform
2012/9/10

39
We refer to |G(f)| as the magnitude spectrum of the signal g(t),
and refer to arg {G(f)} as its phase spectrum.
2012/9/10

40
DIRAC DELTA FUNCTION
Strictly speaking, the theory of the Fourier transform is
applicable only to time functions that satisfy the Dirichlet
conditions. Such functions include energy signals. However,
it would be highly desirable to extend this theory in two
ways:
1. To combine the Fourier series and Fourier transform into a
unified theory, so that the Fourier series may be treated as a
special case of the Fourier transform.
2. To include power signals (i.e., signals for which the average
power is finite) in the list of signals to which we may apply
the Fourier transform.
2012/9/10

41
The Dirac delta function or just delta function, denoted by ,
is defined as having zero amplitude everywhere except
at , where it is infinitely large in such a way that it
contains unit area under its curve; that is
and
)(t
0t
,0)( t 0t
1)( dtt
)()()( 00 tgdttttg
)()()( tgdtg ttt
(A2.3)
(A2.4)
(A2.5)
(A2.6) 2012/9/10

42 2012/9/10

43 2012/9/10

44
Example 1.3 Random Binary Wave / Pulse
1. The pulses are represented by ±A volts (mean=0).
2. The first complete pulse starts at td.
3. During , the presence of +A
or –A is random.
4.When , Tk and Ti are not in the same pulse
interval, hence, X(tk) and X(ti) are independent.
elsewhere,0
0,1
)(Tt
Ttf ddTd
nTttTn d )1(
Ttt ik
0)()()()( ikik tXEtXEtXtXE
2012/9/10

45
Figure 1.6 Sample function of random binary wave.
2012/9/10

46
Solution 1 For
X(tk) and X(ti) occur in the same pulse interval
, , 0 , 0,ik i k k i
t t T t t t t
T-tt
-ttT- t
id
ikd
i.e.,
iff
TttT
ttA
dtT
A
dttftXtXE
ttTtAttXtXE
ik
ik
-ttT-
d
dd
-ttT-
Tik
ikd
dik
ik
ik
d
)(1
)(A)()(
elsewhere0,
--, )()(
2
0
2
0
2
2
2012/9/10

47
Similar reason for any other value of tk
What is the Fourier Transform of ?
Reference : A.Papoulis, Probability, Random
Variables and Stochastic Processes,
Mc Graw-Hill Inc.
)(tXR
where,
0,
),(1)(
2
ikX -ttτ
Tτ
TτT
τA
R
t
2 2( ) sin ( )x
S f A T c fT
2012/9/10

Solution 2
48 2012/9/10

49 2012/9/10

50 2012/9/10

51 2012/9/10

52 2012/9/10

53 2012/9/10

54 2012/9/10

55
Cross-correlation Function of X(t) and Y(t)
and
Note and are not general even
functions.
The correlation matrix is
If X(t) and Y(t) are jointly stationary
(1.20) )()()(
(1.19) )()()(
uXtYEt,uR
uYtXEt,uR
YX
XY
),( utRYX),( utRXY
),(),(
),(),(),(
utRutR
utRutRut
YYX
XYX
R
utτwhere
RR
RR
YYX
XYX
(1.21) )( )(
)( )()(
tt
tttR
( , ), ( , )x y
R t u R t u are autocorrelation functions
2012/9/10

56
(1.22) )(
)](()([
)]()([
)]()([ )(
,Let
τR
tXtYE
XYE
YXEτR
μτt
YX
XY
t
t
t
Proof of :
)]()( E[)( τtYtXτRXY
)()( τRR YXXY t
2012/9/10

X t
c c c
c c cX t
X c c
R E X t X t τ X t X t
E X t X t τ E πf t πf t πf τ
E X t X t τ πf t πf t πf τ d
R τ E πf t πf τ E
E E
t t
=
12 1 2 1 2( )
2
( )0
( ) ( ) ( ) ( ) ( )
( ) ( ) cos(2 )sin(2 2 )
1( ) ( )cos(2 )sin(2 2 )
2
1( ) sin(4 2 2 ) sin(
2 c
X c
πf τ .
R τ πf τ
( )2 ) 1 23
1( )sin(2 )
2
57
Example 1.4 Quadrature-Modulated Process
where X(t) is a stationary process and is uniformly
distributed over [0, 2].
),2(sin)()(
)2(cos)()(
2
1
tπftXtX
tπftXtX
c
c
12
1 2
At sin( ) 0, ( ) 0 ,
( ) and ( ) are orthogonal at some fixed t.
0, 2c
πf τ R
X t X t
t t
= 0
2012/9/10

58
1.5 Ergodic Processes
Ensemble averages of X(t) are averages “across the process”.
(in sample space)
Long-term averages (time averages) are averages “along the
process ” (in time domain)
DC value of X(t) (random variable)
If X(t) is stationary,
(1.24) )(2
1)(
T
Tx dttx
TTμ
(1.25)
2
1
)(2
1)(E
?
X
T
TX
T
Tx
μ
dt μT
dttxET
T μ
2012/9/10

59
represents an unbiased estimate of
The process X(t) is ergodic in the mean, if
The time-averaged autocorrelation function
If the following conditions hold, X(t) is ergodic in the
autocorrelation functions
0)(varlim b.
)(lim a.
T μ
μTμ
xT
XxT
)(TxX
variable.random a s ) (
)261()()(2
1)(
iT,R
. dt txτtxT
τ,TR
x
T
Tx
t
0)(varlim
)(),(lim
,TR
τRTR
xT
XxT
t
t
2012/9/10

60
Linear Time-Invariant Systems (stable)
a. The principle of superposition holds
b. The impulse response is defined as the response of the system with zero initial condition to a unit impulse or δ(t) applied to the input of the system
c. If the system is time invariant, then the impulse response function is the same no matter when the unit impulse is applied
d. The system can be characterized by the impulse response h(t)
e. The Fourier transform of h(t) is denoted as H(f)
2012/9/10

61
1.6 Transmission of a random Process Through a Linear Time-Invariant Filter (System)
where h(t) is the impulse response of the system
If E[X(t)] is finite
and system is stable
If X(t) is stationary,
H(0) :System DC response.
(f)=H(f)X(f)1 1 1( ) ( ) ( )
-Y t h τ X t τ dτ Y
(1.28) )()(
)()(
(1.27) )()(
)()(
111
111
111
-X
-
-
Y
dττtμτh
dττtxEτh
dττtXτhE
tYE tμ
(1.29) ),0( )( 11 Hμdττhμμ X
-XY
2012/9/10
62
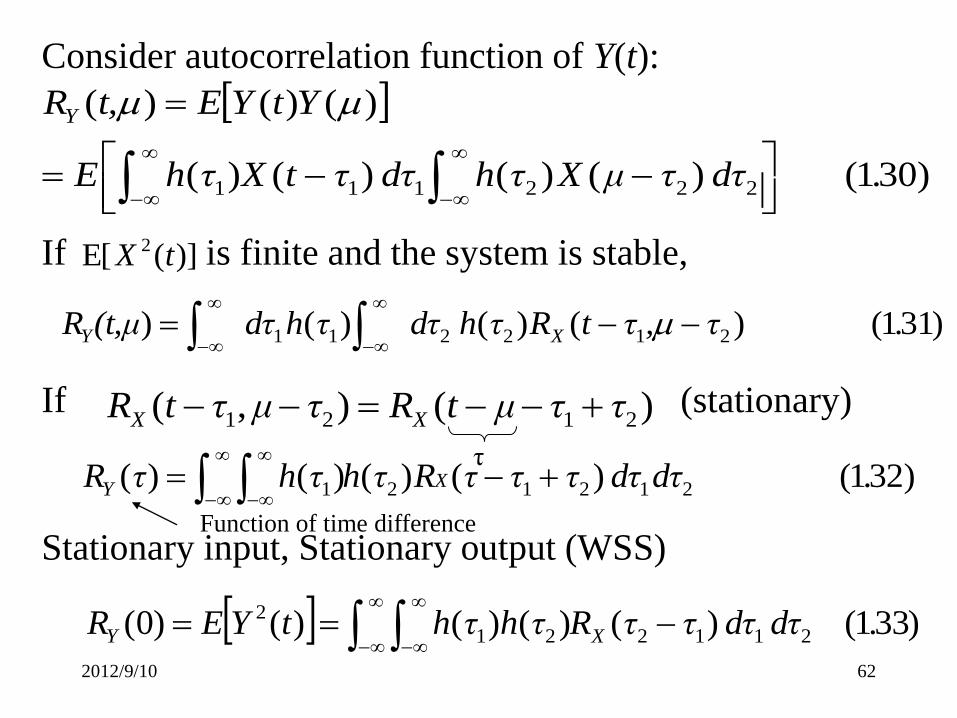
Consider autocorrelation function of Y(t):
If is finite and the system is stable,
If (stationary)
Stationary input, Stationary output (WSS)
)301( )()( )()(
)()()(
222111 . dττμXτhdττtXτhE
YtYEt,R
Y
)](E[ 2 tX
)311( )()( )( ) 212211 . τ,τtRτhdττhdτ(t,μR X
Y
)(),( 2121 ττμtRτμτtR XX
)321( )()()()( 212121 .dτdττττRτhτhτR X
Y
X
Y .dτdτττRτhτhtYER )331( )()()()()0( 211221
2
τ
Function of time difference
2012/9/10

63
1.7 Power Spectral Density (PSD)
Consider the Fourier transform of g(t),
Let H(f ) denote the frequency response,
Recall (1.30)
dfπftjfGtg
dtπftjtgfG
)2exp()()(
)2exp()()(
1 1
2
1 2 2 1 1 2
(1 34)( ) ( )exp( 2 )
( ) ( )exp( 2 ) ( ) ( )
( )
X
.h τ H f j πfτ df
E Y t H f j fτ df h τ R τ τ dτ dτ
df H f
2 2 2 1 1 1
2 2 2
(1 35)
(1 36)
( ) exp( 2 )
( ) exp( 2 ) ( )exp( 2 )
X
X
.
.
dτ h τ R (τ τ ) j fτ dτ
df H f dτ h(τ ) j fτ R j fτ d
t t
(complex conjugate response of the filter)( )*
H f
12 - ttt 1 1 1 2 2 2( ) ( ) ( ) ( ) ( ) ( )E Y t Y u E h X t d h X dt t t t t t
let 2 1
1 2
t t t
t t t
2012/9/10

64
: the magnitude response
Define: Power Spectral Density ( Fourier Transform of )
Recall
Let be the magnitude response of an ideal narrowband filter
D f : Filter Bandwidth
)371( )2exp())()(22 . dτfj(τRfHdftYE
-X
-t
)391( )()()(
)381( )2exp()()(
22 .dffSfHtYE
. dπfτRfS
-X
-XX
tt
)331( )()()()( 2 11221
2 .dτdτττRτhτhtYE X
- -
in W/Hz)( )(Δ2)(
,continuous is )( andΔ If
2
cXcX
Xc
fSff StYE
fSff
(1.40)
)( fH
)τR(
)( fH
ff,
ff,|f|H
f
f
c
c
D
D
2121
0
1)(
2012/9/10

65
Properties of The PSD
Einstein-Wiener-Khintchine relations:
is more useful than !
)431( )2exp()()(
)421( )2exp()()(
. df fjτSτR
. dfjτRfS
XX
XX
t
tt
)( fSX)(τRX
)()( τRfS XX
2012/9/10

66
.df fS
fSf
e.
.fS
τ udufujuR
dτfjτRfd. S
. f fS
fSftYE
t Xc.
. df fStXb. E
. dτRa. S
X
XX
X
X
XX
X
X
X
XX
p )481( )(
)()(
:pdfa withassociated be can PSDThe
)471( )(
, )2exp()(
)2exp()()(
)461( allfor 0)(
0)()Δ2()(
,stationary is)(If
)451( )()(
)441( )()0(
2
2
t
t
( ) ( )R Rt t
2012/9/10

67
Example 1.5 Sinusoidal Wave with Random Phase
2
2
( ) cos(2 ), ~ ( , )
( ) cos(2 )2
( ) ( )exp( 2 )
exp( 2 ) exp( 2 ) exp( 2 )4
c
X c
X X
c c
X t A f t U
AR f
S f R j f d
Aj f j f j f d
t t
t t t
t t t t
Appendix 2
2
( ) ( )4
, exp 2 ( ) ( )
c c
c c
Af f f f
j f f d f f
t
(Example 1.2)
The spectral Analyzer can not detected the phase, so the phase information is lost. 2012/9/10

68
Example 1.6 Random Binary Wave (Example 1.3)
Define the energy spectral density of a pulse as
(1.50) )(sincA
)2exp()1()(
0
)1()(
0if
1if ,
, )(
22
2
2
f TT
dfjT
AfS
T
TT
AR
m(t)
m(t)
A
AtX
T
TX
X
tt
t
t
ttt
(1.52) )(
)(S
(1.51) )(sinc)( 222
T
ff
f TTAfε
g
X
g
2012/9/10

69
Example 1.7 Mixing of a Random Process with a Sinusoidal Process
(1.55) )()(4
1
))(2exp())(2exp()(4
1
)2exp()( )(
(1.54) )2cos()(2
1
)224cos()2cos()(2
1
)2cos()22cos()()(
)()( )(
(1.53) )(0,2~ , )2cos()()(
cXcX
ccX
YY
cX
cccX
ccc
Y
c
ffSffS
dffjffjR
dfjRfS
fR
ftffER
tfftfEtXτtXE
tYτtYER
UtftXtY
tttt
ttt
tt
ttt
t
t
We shift the to the right by , shift it to the left by ,
add them and divide by 4.
)( fSX cf cf2012/9/10

70
Relation Among The PSD of The Input and Output Random Processes
Recall (1.32)
(1.32)
( )
, or
1 2 1 2 1 2
1 2 1 2 1 2
1 2 0 0 1 2
( ) ( ) ( ) ( )
( ) ( ) ( )exp( 2 )
( )
Y X
Y X
Y
R h h R d d
S f h h R j f d d d
Let
S f
t t t t t t t t
t t t t t t t t t
t t t t t t t t
( )
1 2 0 0 2 1 1 2 0
2
( ) ( ) ( )exp( 2 )exp( 2 )exp( 2 )
( ) ( ) * ( )
( )
X
X
X
h h R j f j f j f dτ dτ dτ
S f H f H f
H f S f
t t t t t t
(1.58)
h(t) X(t)
SX (f)
Y(t)
SY (f)
2012/9/10

71
Relation Among The PSD and
The Magnitude Spectrum of a Sample Function
Let x(t) be a sample function of a stationary and ergodic Process X(t).
In general, the condition for Fourier transformable is
This condition can never be satisfied by any stationary x(t) of infinite duration.
We may write
If x(t) is a power signal (finite average power)
Time-averaged autocorrelation periodogram function
(1.61) )()(2
1lim)(
average timeTake Ergodic
(1.60) )2exp()(),(
dttxtxT
R
dtftjtxTfX
T
TTX
T
T
tt
(1.59) )( dttx
(1.62) ),(2T
1 )()(
2
1 2
TfXdttxtxT
T
T
t
For fixed f, it is a r.v. (from one sample function to another) 2012/9/10

72
Take inverse Fourier Transform of right side of (1.62)
From (1.61),(1.63),we have
Note that for any given x(t) periodogram does not converge as
Since x(t) is ergodic
(1.67) is used to estimate the PSD of x(t)
(1.63) )2exp(),(2
1)()(
2
1 2df fTjTfX
Tdttxtx
T
Tt
(1.64) )2exp(),(2
1lim)(
2dffjTfX
TR
TX
tt
T
(1.66)
Recall (1.43) ( )
2
2
2
1( ) ( ) lim ( ) exp( 2 )
2
1( ) lim ( ) exp( 2 )
2
( )exp( 2 )
1( ) lim ( , )
2
X XT
XT
X X
XT
E R R E X f T j f dfT
R E X f T j f dfT
R S f j f df
S f E X f TT
t t t
t t
t t
(1.67)21
lim ( )exp( 2 )2
T
TTE x t j ft dt
T
2012/9/10

73
Cross-Spectral Densities
(1.72) )()()(
(1.22) )()(
)2exp()()(
)2exp()()(
real. benot may )( and )(
(1.69) )2exp()()(
(1.68) )2exp()()(
fSfSfS
τRτR
dfπfτjfSτR
dfπfτjfSτR
fSfS
dfjRfS
dfjRfS
YXYXXY
YXXY
YXYX
XYXY
YXXY
YXYX
XYXY
ttt
ttt
2012/9/10

74
Example 1.8 X(t) and Y(t) are uncorrelated and zero mean stationary processes.
Consider
Example 1.9 X(t) and Y(t) are jointly stationary.
(1.75) )()()(
)()()(
fSfSfS
tYtXtZ
YXZ
Let
( ) (1.77
11 1 1 2 2 2 2
1 1 2 2 1 2 1 2
1 1 2 2 1 2 1 2
( , ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( , )
( ) ( ) ( )
VZ
XY
VZ XY
R t u E V t Z u
E h X t d h Y u d
h h R t u d d
τ t u
R h h R d d
t t t t t t
t t t t t t
t t t t t t t t
)
1 2( ) ( ) ( ) ( )XYVZ
F
S f H f H f S f
1 2 1 2t ut t t t t
2012/9/10

75
1.8 Gaussian Process
Define : Y as a linear functional of X(t) (泛函數)
The process X(t) is a Gaussian process if every linear
functional of X(t) is a Gaussian random variable
T
dttXtgY0
(1.79) )()(
(1.81) (0,1) as , )2
exp(2
1)( Normalized
(1.80) 2
)(exp
2
1)(
2
2
2
Ny
yf
yyf
Y
Y
Y
Y
Y
( g(t): some function and the integral exists)
( e.g g(t): (t) )
Fig. 1.13 Normalized Gaussian distribution 2012/9/10

76
Central Limit Theorem
Let Xi , i =1,2,3,….N be (a) statistically independent R.V.
and (b) have mean and variance .
Since they are independently and identically distributed (i.i.d.)
Normalized Xi
The Central Limit Theorem
The probability distribution of VN approaches N(0,1)
as N approaches infinity.
Note: For some random variables, the approximation is poor even N is quite large.
N
i
iN
i
i
Xi
X
i
YN
Y
Y
NiXY
1
1V Define
.1Var
,0 EHence,
1,2,...., )(1
Xμ
2
Xσ
2012/9/10

77
Properties of A Gaussian Process
1.
0
0
Define ( )
( )
where ( )
0
0
0
0
( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( )
T
T
Y
T
Y
T
Y t h t X d
Z g t h t X τ d dt
g t h t dt X τ d
g X dτ
g g
t t t
t t
t t
t t
t
0
( )
By definition is a Gaussian random variable (1.81)
( ) is Gaussian0
( )
( ) ( ) , 0
Y
T
t h t dt
Z
Y t h t X d t
t
t t t
X(t) h(t)
Y(t)
Gaussian in Gaussian out
2012/9/10

78
2. If X(t) is Gaussisan
Then X(t1) , X(t2) , X(t3) , …., X(tn) are jointly Gaussian.
Let
and the set of covariance functions be
,....,n,itXE itX i21 )()(
X
x μ Σ x μ
μ
,
where
Then (1.85)
where mean vector
1
( ) ( )
1 2
1,( ),..., ( ) 1 1
2 2
1 2
( , ) ( ) ( ) 1 2
( ) ( ) ( )
1 1( ..., ) exp( ( ) ( ))
2(2 )
, ,.
k i
n
iX k i k X t X t
Tn
T
X t X t n n
C t t E X t X t k,i , ,...,n
X t ,X t ,....,X t
f x x
D
Σ
Σ
covariance matrix {
determinant of covariance matrix
, 1
...,
( , )}
T
n
n
X k i k iC t t
D
2012/9/10

Supplemental Material
2012/9/10 79

2012/9/10 80

2012/9/10 81

2012/9/10 82

2012/9/10 83

84
3. If a Gaussian process is stationary then it is strictly stationary.
(This follows from Property 2)
4. If X(t1),X(t2),…..,X(tn) are uncorrelated as
Then they are independent
Proof : uncorrelated
is also a diagonal matrix, Δ=determinant of Σ
(1.85)
.21, ]))(()([( where,
0
0
22
2
2
1
,n,itXEtXE iii
n
Σ
x μ Σ x μ
x
where ( ) and ( )
1
1,( ), , ( ) 1 1
2 2
1
2
2
1 1( ..., ) exp( ( ))
2(2 )
( ) ( )
1exp
22
n
i
i
i
T
X t X t n n
n
X X i
i
i X
i i X i
ii
f x x
f f x Independent
xX X t f x
D
0)])()()([( )()( ik tXitXk tXtXE
1Σ
2012/9/10

85
1.9 Noise
· Shot noise
· Thermal noise
k: Boltzmann’s constant = 1.38 x 10-23 joules/K, T is the
absolute temperature in degree Kelvin.
22
2
2
22
amps 41
41
volts 4
fkTGfR
kTVER
IE
fkTRVE
TNTN
TN
DD
D
2012/9/10

86
· White noise
(1.93)
(1.94)
:equivalent noise temperature of the receiver
( ) (1.95)2
0
0
0
0
( )2
( )
( ) ( )exp( 2 )2
( )
W
e
e
W
W w
NS f
N kT
T
NR
NS f R j f d
f t
t t
t t t
1 Table A6.31, ( )f f δ δ 2012/9/10

87
Example 1.10 Ideal Low-Pass Filtered White Noise
)2sinc(
(1.97) )2exp(2
)(
(1.96)
02)(
0
0
0
t
tt
BBN
df fjN
R
B f
B f-B N
fS
B
BN
N
2012/9/10

88
Example 1.11 Correlation of White Noise with a Sinusoidal Wave
White noise
2
(1.98)
The variance of is
0
1 1 2 2 1 20 0
1 2 1 20
2'( ) ( )cos(2 )
( )
2( )cos(2 ) ( )cos(2 )
2( ) ( ) cos(2 )cos(2 )
T
c
T T
c c
c c
w t w t f t dtT
w' t
E w t f t w t f t dt dtT
E w t w t f t f tT
2
From (1.95)
1 20
1 2 1 2 1 20 0
01 2 1 2 1 2
0 0
20 0
0
2( , )cos(2 )cos(2 )
2( )cos(2 )cos(2 )
2
cos (2 )2
T T
T T
W c c
T T
c c
T
c
dt dt
R t t f t f t dt dtT
Nt t f t f t dt dt
T
N N f t dt
T
(1.99)
X T
dt0
integer is , , )2cos(2
kT
kftf
Tcc
)(tw )(' Tw
)(' Tw
)(' Tw
2012/9/10

89
1.10 Narrowband Noise (NBN)
Two representations
a. in-phase and quadrature components (cos(2 fct) ,sin(2 fct))
b.envelope and phase
1.11 In-phase and quadrature representation
signals pass-low are )( and )(
(1.100) )2sin()()2cos()()(
tntn
t ftnt ftntn
Q
Q
I
ccI
(sample function)
0( )
T
dt2012/9/10

90
Important Properties
1.nI(t) and nQ(t) have zero mean.
2.If n(t) is Gaussian then nI(t) and nQ(t) are jointly Gaussian.
3.If n(t) is stationary then nI(t) and nQ(t) are jointly stationary.
4.
5. nI(t) and nQ(t) have the same variance .
6.Cross-spectral density is purely imaginary. (problem 1.28)
7.If n(t) is Gaussian, its PSD is symmetric about fc, then nI(t) and nQ(t)
are statistically independent. (problem 1.29)
(1.101) otherwise
0
, )()()()(
Bf-BffSffSfSfS
cNcN
NN QI
2
0N
(1.102)
otherwise
0
,
)( )(
Bf-BffSffSj
fSfS
cNcN
NNNN IQQI
2012/9/10

1.
From figure 1.19(a), we see that
Proof of e.q. (1.101)
Supplement
2012/9/10 91

2012/9/10 92

2.
From figure 1.19(a), we see that
Supplement
2012/9/10 93

2012/9/10 94
95
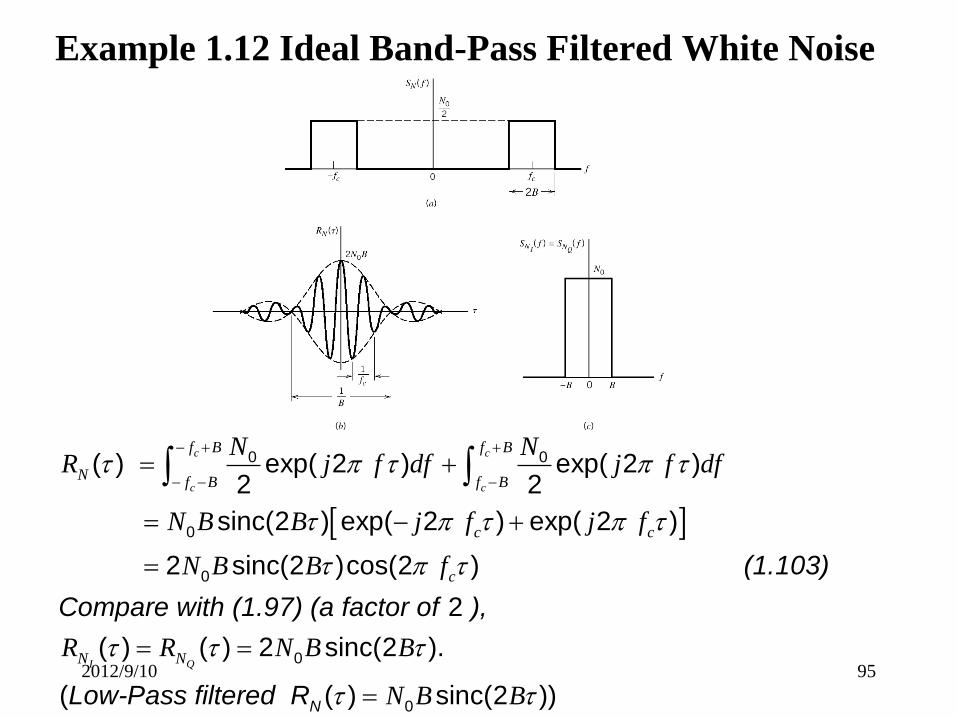
Example 1.12 Ideal Band-Pass Filtered White Noise
(1.103)
Compare with (
0 0
0
0
( ) exp( 2 ) exp( 2 )2 2
sinc(2 ) exp( 2 ) exp( 2 )
2 sinc(2 )cos(2 )
c c
c c
f B f B
Nf B f B
c c
c
N NR j f df j f df
N B B j f j f
N B B f
t t t
t t t
t t
N
1.97) (a factor of ),
Low-Pass filtered R
0
0
2
( ) ( ) 2 sinc(2 ).
( ( ) sinc(2 ))
I QN NR R N B B
N B B
t t t
t t
2012/9/10

96
1.12 Representation in Terms of Envelope and Phase Components
Let NI and NQ be R.V.s obtained (at some fixed time) from nI(t)
and nQ(t). NI and NQ are independent Gaussian with zero mean and
variance .
(1.107) )(
)(tan)(
Phase
(1.106) )()()(
Envelope
(1.105) )(2cos)()(
1
21
22
tn
tnt
tntntr
ttftrtn
I
Q
QI
c
22012/9/10

97
(1.108) )2
exp(2
1),(
2
22
2,
QI
QINN
nnnnf
QI
(1.112)
(1.111) sin
(1.110) cosLet
(1.109) )2
exp(2
1),(
2
22
2
,
r dr dψ dndn
ψrn
ψrn
dn dnnn
dndnnnf
QI
Q
I
QI
QI
QIQINNQI
2012/9/10

98
Substituting (1.110) - (1.112) into (1.109)
(1.113)
0 20 2
el
, ,
2
2 2
2
, 2 2
( , ) ( , )
exp( )2 2
( , ) exp( )2 2
1
, ( ) 2
0
I QN N I Q I Q R Ψ
R Ψ
Ψ
f n n dn dn f r rdrd
r rdrd
r rf r
f
(1.114)
sewhere
(1.115)
elsewhere
( ) is Rayleigh distribution.
For convenienc
2
2 2exp( ) , 0
( ) 2
0
R
R
r rr
f r
f r
e , let . ( ) ( ) (Normalized)
, ( ) (1.118)
elsewhere
2
exp( ) 02
0
V R
V
rν f ν f r
σ
f ν
2012/9/10

99
Figure 1.22 Normalized Rayleigh distribution.
2012/9/10
100
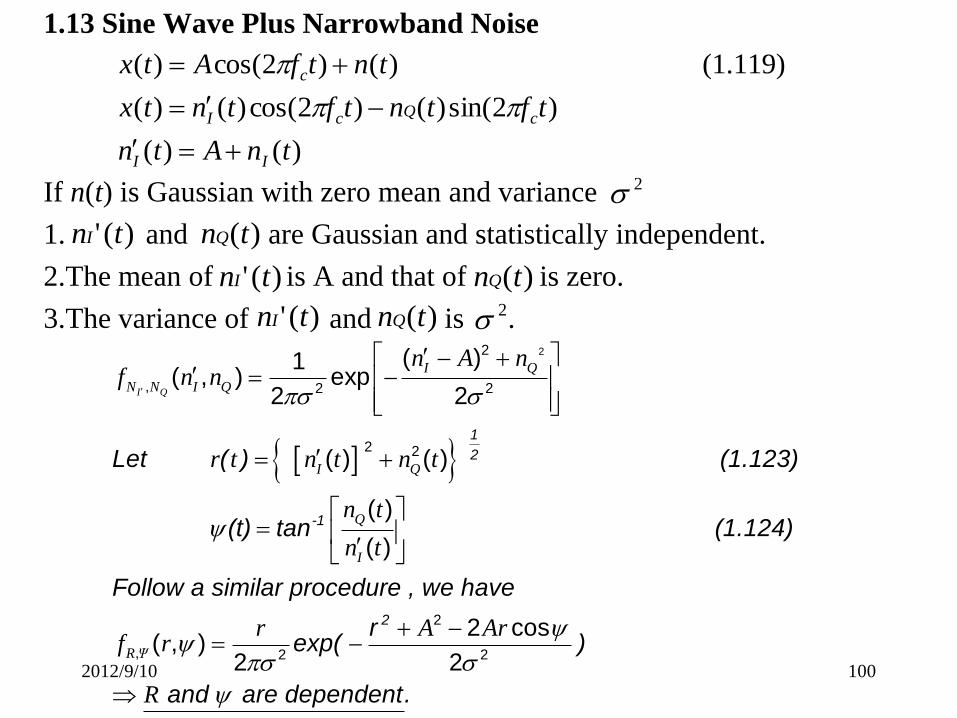
1.13 Sine Wave Plus Narrowband Noise
If n(t) is Gaussian with zero mean and variance
1. and are Gaussian and statistically independent.
2.The mean of is A and that of is zero.
3.The variance of and is .
)()(
)2sin()()2cos()()(
(1.119) )()2cos()(
tnAtn
tftntftntx
tntfAtx
II
cQcI
c
1
2
-1
Let ( ) (1.123)
(t) tan
22
, 2 2
2 2
( )1( , ) exp
2 2
( ) ( )
( )
( )
I Q
I Q
N N I Q
I Q
Q
I
n A nf n n
r t n t n t
n t
n t
2
(1.124)
Follow a similar procedure , we have
rexp( )
and are dependent.
2
, 2 2
2 cos( , )
2 2R Ψ
r A Arf r
R
2
2
)(' tnI )(tnQ
)(' tnI )(tnQ
)(' tnI )(tnQ
2012/9/10

101
The modified Bessel function of the first kind of zero
order is defined as (Appendix 3)
It is called Rician distribution.
If
2
0 22
22
2
2
0 ,
(1.126) )dcosexp()2
exp(2
),( )(
ArArr
drfrf ΨRR
(1.127)
Let (1.128)
2
00
2 2
02 2 2 2
1( ) exp( cos )
2
exp( ) ( )2
R
I x x d
Ar r r A Arx , f (r) I
σ
=1,
2
00
10, (0)
2A I d
it is Rayleigh distribution. 2012/9/10

102
(1.132) )()2
exp(
(1.131) )( )(
,
0
22
avIav
v
rfvf
Aa
rNormalized
RV
Figure 1.23 Normalized Rician distribution. 2012/9/10