ch07 5 class - math.nus.edu.sgmatysh/ma3220/ma3220_files/ch07_5_class.pdf · equilibrium solutions...
TRANSCRIPT





Boyce/D
iPrim
a 9th
ed, C
h 7.5: H
omogen
eous
Lin
ear System
s with
Con
stant C
oefficients
Elem
entary Differential E
quations and Boundary V
alue Problem
s, 9thedition, by W
illiam E
. Boyce and R
ichard C. D
iPrim
a, ©2009 by John W
iley & S
ons, Inc.
We consider here a hom
ogeneous system of n
first order linear equations w
ith constant, real coefficients:
This system
can be written as x'=
Ax, w
here
nnn
nn
n
nn
nn
xa
xa
xa
x
xa
xa
xa
x
xa
xa
xa
x
22
11
22
221
212
12
121
111
nnn
n
n n
ma
aa
aa
a
aa
a
tx
tx
tx
t
21
222
21
112
11
2 1
,
)(
)(
)(
)(
Ax

Equilibrium
Solutions
Note that if n
= 1, then the system
reduces to
Recall that x
= 0 is the only equilibrium
solution if a
0.
Further, x
= 0 is an asym
ptotically stable solution if a<
0, since other solutions approach x
= 0 in this case.
Also, x
= 0 is an unstable solution if a
> 0, since other
solutions depart from x
= 0 in this case.
For n
> 1, equilibrium
solutions are similarly found by
solving Ax
= 0. W
e assume detA
0, so that x
= 0
is the only solution. D
etermining w
hether x=
0is asym
ptotically stable or unstable is an im
portant question here as well.
ate
tx
axx
)
(

Phase P
lane
When n
= 2, then the system
reduces to
This case can be visualized in the x
1 x2 -plane, w
hich is called the p
hase p
lane.
In the phase plane, a direction field can be obtained by evaluating A
xat m
any points and plotting the resulting vectors, w
hich will be tangent to solution vectors.
A plot that show
s representative solution trajectories is called a p
hase portrait.
Exam
ples of phase planes, directions fields and phase portraits w
ill be given later in this section.
222
121
2
212
111
1
xa
xa
x
xa
xa
x

Solving H
omogeneous S
ystem
To construct a general solution to x'=
Ax, assum
e a solution of the form
x=
ert, w
here the exponent rand the constant
vector are to be determ
ined.
Substituting x
= e
rtinto x'= A
x, we obtain
Thus to solve the hom
ogeneous system of differential
equations x'= A
x, we m
ust find the eigenvalues and eigenvectors of A
.
Therefore x
= e
rtis a solution of x'= A
xprovided that r
is an eigenvalue and
is an eigenvector of the coefficient m
atrix A.
0ξ
IA
Aξ
ξAξ
ξ
r
re
er
rtrt

Exam
ple 1: Direction F
ield (1 of 9)
Consider the hom
ogeneous equation x'= A
xbelow
.
A direction field for this system
is given below.
Substituting x
= e
rtin for x, and rewriting system
as
(A-rI)
= 0, w
e obtain
xx
1
4
11
0 0
14
11
1 1
r
r

Exam
ple 1: Eigenvalues (2 of 9)
Our solution has the form
x=
ert, w
here rand
are found by solving
Recalling that this is an eigenvalue problem
, we determ
ine rby solving det(A
-rI) = 0:
Thus r
1=
3 and r2
= -1.
0 0
14
11
1 1
r
r
)1)(
3(
32
4)
1(1
4
11
22
r
rr
rr
r
r

Exam
ple 1: First E
igenvector (3 of 9)
Eigenvector for r
1=
3:S
olve
by row reducing the augm
ented matrix:
0 0
24
12
0 0
31
4
13
1
2 1
2 1
0ξ
IA
r
2 1choose
arbitrary,
1 2/1
2/1
00
02/
11
00
0
02/
11
02
4
02/
11
02
4
01
2
)1(
2 2)1
(
2 21
ξξ
cc

Exam
ple 1: Second E
igenvector (4 of 9)
Eigenvector for r
2=
-1:S
olve
by row reducing the augm
ented matrix:
0 0
24
12
0 0
11
4
11
1
2 1
2 1
0ξ
IA
r
2 1choose
arbitrary,
1
2/1
2/1
00
02/
11
00
0
02/
11
02
4
02/
11
02
4
01
2
)2(
2 2)2
(
2 21
ξξ
cc

Exam
ple 1: General S
olution (5 of 9)
The corresponding solutions x
= e
rtof x'= A
xare
The W
ronskian of these two solutions is
Thus x
(1)and x(2)are fundam
ental solutions, and the general solution of x'=
Ax
is
tt
et
et
2 1
)(
,2 1
)(
)2(
3)1
(x
x
04
22
)(
,2
3 3)2
()1
(
t
tt
tt
ee
e
ee
tW
xx
tt
ec
ec
tc
tc
t
2 1
2 1
)(
)(
)(
23
1
)2(
2)1
(1
xx
x

Exam
ple 1: Phase P
lane for x(1)
(6 of 9)
To visualize solution, consider first x =
c1 x
(1):
Now
Thus x
(1)lies along the straight line x2
= 2x
1 , which is the line
through origin in direction of first eigenvector (1)
If solution is trajectory of particle, with position given by
(x1 , x
2 ), then it is in Q1 w
hen c1
> 0, and in Q
3 when c
1<
0.
In either case, particle moves aw
ay from origin as tincreases.
tt
te
cx
ec
xe
cx x
t3
12
31
13
12 1
)1(
2,
2 1)
(
x
12
1 2
1 13
31
23
11
22
2,
xx
c x
c xe
ec
xe
cx
tt
t

Exam
ple 1: Phase P
lane for x(2)
(7 of 9)
Next, consider x =
c2 x
(2):
Then x
(2)lies along the straight line x2
= -2x
1 , which is the
line through origin in direction of 2nd eigenvector (2)
If solution is trajectory of particle, with position given by
(x1 , x
2 ), then it is in Q4 w
hen c2
> 0, and in Q
2 when c
2<
0.
In either case, particle moves tow
ards origin as tincreases.
tt
te
cx
ec
xe
cx x
t
2
22
12
2 1)2
(2
,2 1
)(
x

Exam
ple 1: P
hase Plane for G
eneral Solution (8 of 9)
The general solution is x =
c1 x
(1)+c
2 x(2):
As t
, c
1 x(1)is dom
inantand c2 x
(2)becomes negligible.
Thus, for c
1 0,all solutions asym
ptotically approach the line x
2=
2x1
as t
.
Sim
ilarly, for c2
0,all solutions asymptotically approach
the line x2
= -2x
1as t
-.
The origin is a sad
dle p
oint,
and is unstable. See graph.
tt
ec
ec
t
2 1
2 1)
(2
31
x
Exam
ple 1: T
ime P
lots for General S
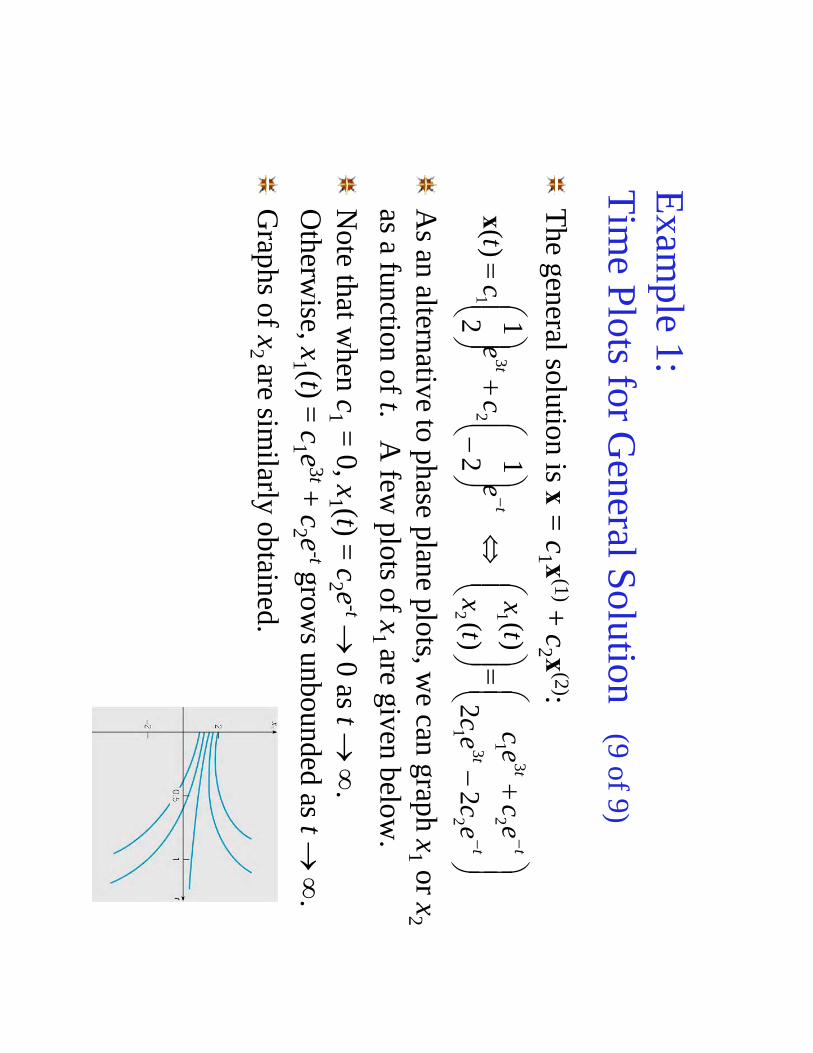
olution (9 of 9)
The general solution is x =
c1 x
(1)+c
2 x(2):
As an alternative to phase plane plots, w
e can graph x1
or x2
as a function of t. A few
plots of x1 are given below
.
Note that w
hen c1
= 0, x
1 (t) = c
2 e-t
0 as t
. O
therwise, x
1 (t) = c
1 e3t+
c2 e
-tgrows unbounded as t
.
Graphs of x
2 are similarly obtained.
tt
tt
tt
ec
ec
ec
ec
tx
tx
ec
ec
t2
31
23
1
2 12
31
22
)(
)(
2 1
2 1)
(x

Exam
ple 2: Direction F
ield (1 of 9)
Consider the hom
ogeneous equation x'= A
xbelow
.
A direction field for this system
is given below.
Substituting x
= e
rtin for x, and rewriting system
as
(A-rI)
= 0, w
e obtain
xx
2
2
23
0 0
22
23
1 1
r
r

Exam
ple 2: Eigenvalues (2 of 9)
Our solution has the form
x=
ert, w
here rand
are found by solving
Recalling that this is an eigenvalue problem
, we determ
ine rby solving det(A
-rI) = 0:
Thus r
1=
-1 and r2
= -4.
)4)(
1(
45
2)
2)(
3(
22
23
2
r
rr
rr
rr
r
0 0
22
23
1 1
r
r

Exam
ple 2: First E
igenvector (3 of 9)
Eigenvector for r
1=
-1:S
olve
by row reducing the augm
ented matrix:
0 0
12
22
0 0
12
2
21
3
2 1
2 1
0ξ
IA
r
2 1choose
2/2
00
0
02/
21
01
2
02/
21
01
2
02
2
)1(
2 2)1
(ξ
ξ

Exam
ple 2: Second E
igenvector (4 of 9)
Eigenvector for r
2=
-4:S
olve
by row reducing the augm
ented matrix:
0 0
22
21
0 0
42
2
24
3
2 1
2 1
0ξ
IA
r
1 2choose
2
00
0
02
1
02
2
02
1
)2(
2 2)
2(
ξ
ξ

Exam
ple 2: General S
olution (5 of 9)
The corresponding solutions x
= e
rtof x'= A
xare
The W
ronskian of these two solutions is
Thus x
(1)and x(2)are fundam
ental solutions, and the general solution of x'=
Ax
is
tt
et
et
4)2
()1
(
1 2)
(,
2 1)
(
xx
0
32
2)
(,
5
4 4)
2()1
(
t
tt
tt
ee
e
ee
tW
xx
tt
ec
ec
tc
tc
t
42
1
)2(
2)1
(1
1 2
2 1
)(
)(
)(
xx
x

Exam
ple 2: Phase P
lane for x(1)
(6 of 9)
To visualize solution, consider first x =
c1 x
(1):
Now
Thus x
(1)lies along the straight line x2
= 2
½x
1 , which is the
line through origin in direction of first eigenvector (1)
If solution is trajectory of particle, with position given by
(x1 , x
2 ), then it is in Q1 w
hen c1
> 0, and in Q
3 when c
1<
0.
In either case, particle moves tow
ards origin as tincreases.
tt
te
cx
ec
xe
cx x
t
12
11
12 1
)1(
2,
2 1)
(x
12
1
2
1 11
21
12
22
,x
xc
x
c xe
ec
xe
cx
tt
t

Exam
ple 2: Phase P
lane for x(2)
(7 of 9)
Next, consider x =
c2 x
(2):
Then x
(2)lies along the straight line x2
= -2
½x
1 , which is the
line through origin in direction of 2nd eigenvector (2)
If solution is trajectory of particle, with position given by
(x1 , x
2 ), then it is in Q4 w
hen c2
> 0, and in Q
2 when c
2<
0.
In either case, particle moves tow
ards origin as tincreases.
tt
te
cx
ec
xe
cx x
t4
22
42
14
22 1
)2(
,2
1 2)
(
x

Exam
ple 2: P
hase Plane for G
eneral Solution (8 of 9)
The general solution is x =
c1 x
(1)+c
2 x(2):
As t
, c
1 x(1)is dom
inantand c2 x
(2)becomes negligible.
Thus, for c
1 0,all solutions asym
ptotically approach origin along the line x
2=
2½
x1
as t
.
Sim
ilarly, all solutions are unboundedas t
-.
The origin is a n
ode, and is
asymptotically stable.
tt
et
et
4)2
()1
(
1 2)
(,
2 1)
(
xx

Exam
ple 2: T
ime P
lots for General S
olution (9 of 9)
The general solution is x =
c1 x
(1)+c
2 x(2):
As an alternative to phase plane plots, w
e can graph x1
or x2
as a function of t. A few
plots of x1 are given below
.
Graphs of x
2 are similarly obtained.
tt
tt
tt
ec
ec
ec
ec
tx
tx
ec
ec
t4
21
42
1
2 14
21
2
2
)(
)(
1 2
2 1)
(x

2 x 2 Case:
Real E
igenvalues, Saddle P
oints and Nodes
The previous tw
o examples dem
onstrate the two m
ain cases for a 2 x 2 real system
with real and different eigenvalues:
Both eigenvalues have opposite signs, in w
hich case origin is a saddle point and is unstable.
Both eigenvalues have the sam
e sign, in which case origin is a node,
and is asymptotically stable if the eigenvalues are negative and
unstable if the eigenvalues are positive.

Eigenvalues, E
igenvectors and F
undamental S
olutions
In general, for an nx n
real linear system x'=
Ax:
All eigenvalues are real and different from
each other.
Som
e eigenvalues occur in complex conjugate pairs.
Som
e eigenvalues are repeated.
If eigenvalues r1 ,…
, rn
are real & different, then there are n
corresponding linearly independent eigenvectors (1),…
, (n).
The associated solutions of x'=
Ax
are
Using W
ronskian, it can be shown that these solutions are
linearly independent, and hence form a fundam
ental set of solutions. T
hus general solution is
tr
nn
tr
ne
te
t)
()
()1
()1
()
(,
,)
(1
ξx
ξx
tr
nn
tr
ne
ce
c)
()1
(1
1ξ
ξx

Herm
itian Case: E
igenvalues, Eigenvectors &
F
undamental S
olutions
If Ais
an nx n
Herm
itian matrix (real and sym
metric), then
all eigenvalues r1 ,…
, rn
are real, although some m
ay repeat.
In any case, there are ncorresponding linearly independent
and orthogonal eigenvectors (1),…
, (n). T
he associated solutions of x'=
Ax
are
and form a fundam
ental set of solutions.
tr
nn
tr
ne
te
t)
()
()1
()1
()
(,
,)
(1
ξx
ξx

Exam
ple 3: Herm
itian Matrix (1 of 3)
Consider the hom
ogeneous equation x'= A
xbelow
.
The eigenvalues w
ere found previously in Ch 7.3, and w
ere: r
1=
2, r2
= -1 and r
3=
-1.
Corresponding eigenvectors:
xx
01
1
10
1
11
0
1 1 0
,
1 0 1
,
1 1 1)3
()2
()1
(ξ
ξξ

Exam
ple 3: General S
olution (2 of 3)
The fundam
ental solutions are
with general solution
tt
te
ee
1 1 0
,
1 0 1
,
1 1 1)3
()
2(2
)1(
xx
x
tt
te
ce
ce
c
1 1 0
1 0 1
1 1 1
32
21
x

Exam
ple 3: General S
olution Behavior (3 of 3)
The general solution is x =
c1 x
(1)+c
2 x(2)+
c3 x
(3):
As t
, c
1 x(1)is dom
inantand c2 x
(2), c3 x
(3)become
negligible.
Thus, for c
1 0,all solns x
become unbounded
as t
,
while for c
1=
0,all solns x
0as t
.
The initial points that cause c
1=
0 are those that lie in plane determ
ined by (2)and
(3). Thus solutions that start in this
plane approach origin as t
.
tt
te
ce
ce
c
1 1 0
1 0 1
1 1 1
32
21
x

Com
plex Eigenvalues and F
undamental S
olns
If some of the eigenvalues r
1 ,…, r
noccur in com
plex conjugate pairs, but otherw
ise are different, then there are still n
corresponding linearly independent solutions
which form
a fundamental set of solutions. S
ome m
ay be com
plex-valued, but real-valued solutions may be derived
from them
. This situation w
ill be examined in C
h 7.6.
If the coefficient matrix A
is complex, then com
plex eigenvalues need not occur in conjugate pairs, but solutions w
ill still have the above form (if the eigenvalues are
distinct) and these solutions may be com
plex-valued.
,)
(,
,)
()
()
()1
()1
(1
tr
nn
tr
ne
te
tξ
xξ
x

Repeated E
igenvalues and Fundam
ental Solns
If some of the eigenvalues r
1 ,…, r
nare repeated, then there
may not be n
corresponding linearly independent solutions of the form
In order to obtain a fundamental set of solutions, it m
ay be necessary to seek additional solutions of another form
.
This situation is analogous to that for an nth order linear
equation with constant coefficients, in w
hich case a repeated root gave rise solutions of the form
This case of repeated eigenvalues is exam
ined in Section 7.8.
tr
nn
tr
ne
te
t)
()
()1
()1
()
(,
,)
(1
ξx
ξx
,,
,2
rtrt
rte
tte
e