césar sánchez sellero universidad de santiago de compostela
DESCRIPTION
Bioinformática: Fundamentos y aplicaciones de actualidad Curso de verano 2005 Revisión de algunos modelos probabilísticos de evolución genética (Procesos de Markov y cadenas de Markov ocultas). César Sánchez Sellero Universidad de Santiago de Compostela. Motivación Probabilidad - PowerPoint PPT PresentationTRANSCRIPT
Bioinformática: Fundamentos y aplicaciones de actualidadBioinformática: Fundamentos y aplicaciones de actualidad
Curso de verano 2005Curso de verano 2005
Revisión de algunos modelos Revisión de algunos modelos probabilísticos de evolución genéticaprobabilísticos de evolución genética
(Procesos de Markov(Procesos de Markovy cadenas de Markov ocultas)y cadenas de Markov ocultas)
César Sánchez SelleroCésar Sánchez Sellero
Universidad de Santiago de CompostelaUniversidad de Santiago de Compostela

1.1. MotivaciónMotivación
2.2. ProbabilidadProbabilidad
3.3. Procesos estocásticosProcesos estocásticos
4.4. Cadenas de MarkovCadenas de Markov
5.5. Cadenas de Markov ocultasCadenas de Markov ocultas
6.6. AplicacionesAplicaciones

Motivación: Modelo para familias de proteínasMotivación: Modelo para familias de proteínas
m1
i1
d1
m2
i2
d2
m3
i3
d3
m4
i4
d4
m0
i0
m5

ProbabilidadProbabilidad
Ejemplo. Lanzar una moneda. Ω={c, +}.
Experimento aleatorio. Es un experimento cuyos resultados posibles son conocidos de antemano, pero se desconoce cuál de ellos va a ocurrir.
Espacio muestral. Es el conjunto formado por todos los resultadosposibles del experimento aleatorio. Lo denotamos por Ω.
Suceso. Cualquier subconjunto del espacio muestral.
Suceso elemental. Es un suceso unitario. Está constituido por un único elemento.Decimos que ha ocurrido un suceso cuando se ha obtenido alguno de los resultados que lo forman.
Ejemplo. Lanzar un dado. Ω={1, 2, 3, 4, 5, 6}. A=“que salga par”={2, 4, 6}.

Suceso seguro. Es el que siempre ocurre, y por tanto, es Ω.Suceso imposible. Es el que nunca ocurre, y por tanto, es el vacío, Ø.
Unión. Ocurre AUB si ocurre al menos uno de los sucesos A o B.
Diferencia de sucesos. Ocurre A\B si ocurre A pero no ocurre B. A\B=A Bc.
Sucesos incompatibles. A y B son incompatibles sino pueden ocurrir a la vez. A B = Ø.
Suceso contenido en otro. Siempre que sucede A, sucede también B. A B.
Intersección. Ocurre A B si ocurren los dos sucesos A y B a la vez.
Complementario. Ocurre Ac si y sólo si no ocurre A.

Definición. Se define la probabilidad como una aplicación que a cada suceso le asigna un número entre cero y uno ( su probabilidad), y que cumple las siguientes condiciones:
Propiedades
i. P(Ω)=1.
ii. Si A B = Ø entonces P(AUB)=P(A)+P(B).
1. P(Ø)=0.
2. Si A1, A2, …, An son sucesos incompatibles dos a dos, entonces P(A1, A2, …, An) = P(A1) + P(A2) + … + P(An).
3. P(Ac) = 1 - P(A)
4. Si A B, entonces P(A) ≤ P(B).
5. Si A y B son dos sucesos cualesquiera, se cumple
P(AUB) = P(A) + P(B) - P(A B)

Asignación de probabilidadesAsignación de probabilidades
La asignación de probabilidades a veces se deduce de la estructura del experimento.
Si Ω es finito, en ciertas ocasiones podemos pensar que todos los sucesos elementales tienen la misma probabilidad (equiprobables).
Esto permite calcular la probabilidad de cualquier otro suceso mediante la regla de Laplace:
Casos favorables( )
Casos posiblesP A

Probabilidad condicionada. Probabilidad condicionada. Independencia.Independencia.
A
B
Bc
Ac
B
Bc
0.6
0.4
0.3
0.7
0.8
0.2
P(B/A)
P(A)
P(A B)=P(A).P(B/A)=0.6x0.3=0.18
0.42
0.32
0.08
1.00
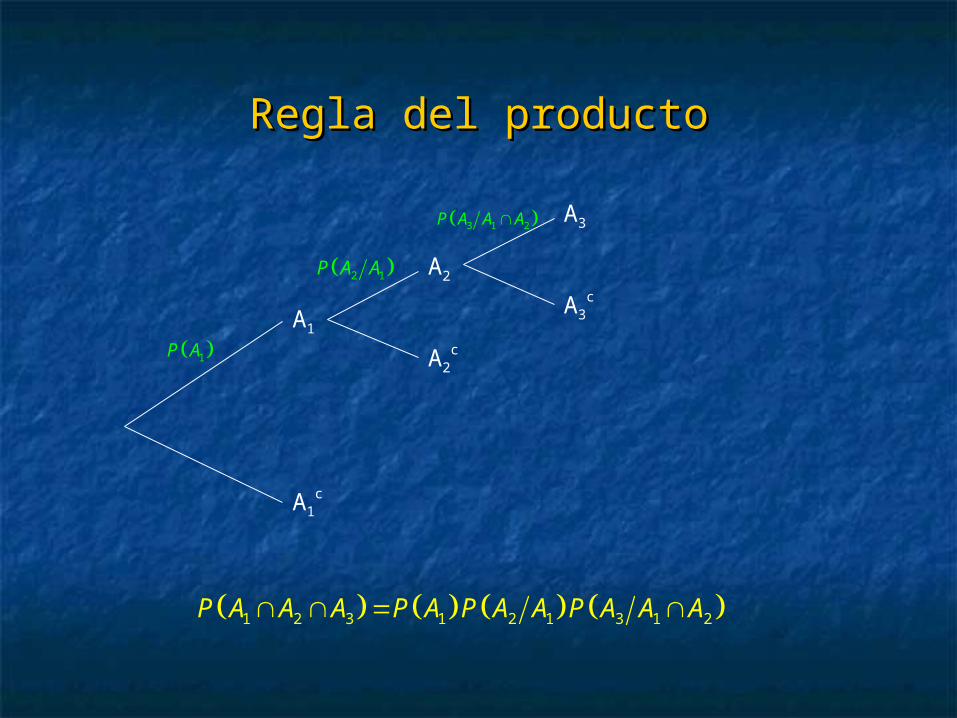
Regla del productoRegla del producto
1 2 3 1 2 1 3 1 2P A A A P A P A A P A A A
3 1 2P A A A
1P A
A1
A1c
A2
A2c
A3
A3c
2 1P A A

Ley de las probabilidades totalesLey de las probabilidades totales
A1
A2
An
.
.
.
B
Bc
B
Bc
B
Bc
P(A1 B)=P(A1).P(B/A1)
P(A2 B)=P(A2).P(B/A2)
P(An B)=P(An).P(B/An)
P(B)

Teorema de BayesTeorema de Bayes
A1
A2
An
.
.
.
B
Bc
B
Bc
B
Bc
P(A1 B)=P(A1).P(B/A1)
P(A2 B)=P(A2).P(B/A2)
P(An B)=P(An).P(B/An)
1 1 11
1 1 2 2 n n
P A B P A P B AP A B
P B P A P B A P A P B A P A P B A

Procesos estocásticosProcesos estocásticos
Indice del proceso, t
1 2 3 4 5 6 7 8 9 10
Espacio de estados

Cadenas de MarkovCadenas de MarkovDefinición. Una cadena de Markov es un proceso estocástico que presenta las siguientes propiedades:
i. Es un proceso en tiempo discreto.
ii. El espacio de estados es discreto.
iii. Dependencia markoviana.
iv. Las probabilidades de transición no dependen de la etapa.
Elementos de una cadena de Markov.
1 2, , , sE E E E
11 12 1
21 22 2
1 2
s
s
s s ss
p p p
p p pP
p p p
Espacio de estados:
Matriz de transición:
1siendo ij t j t ip P X E X E
0 0 0 01 2, , , sP p p p Distribución inicial:
00siendo i ip P X E

Representación de una cadena de MarkovRepresentación de una cadena de Markov
1 2 3, ,E E E EEjemplo. 0 0 1
0.25 0.25 0.5
0 1 0
P
0.25
0.5
11
0.25
E1 E2
E3
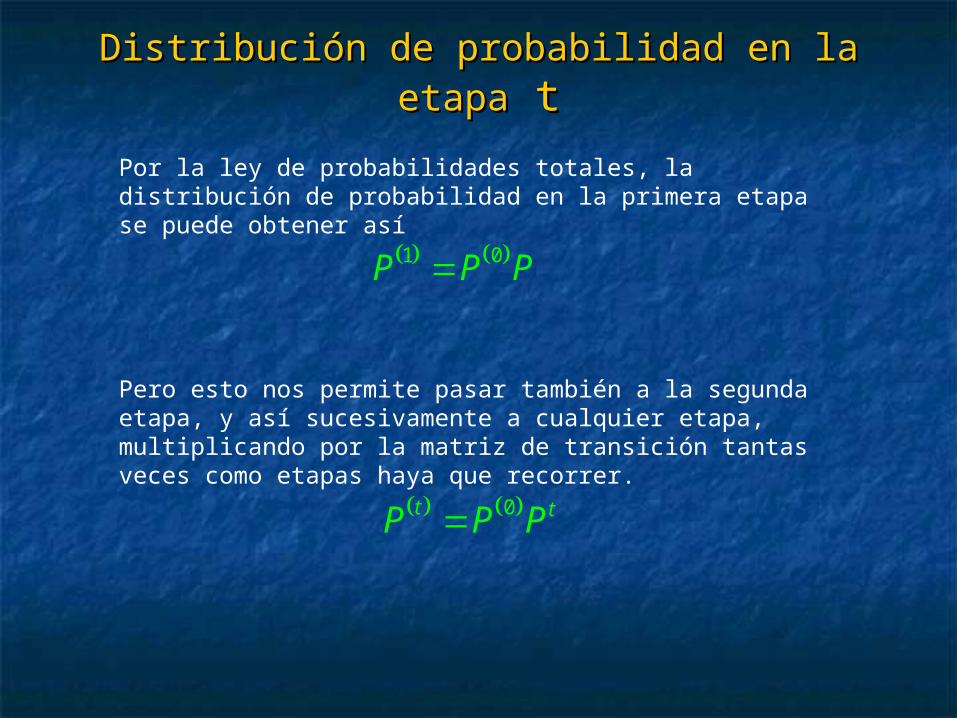
Distribución de probabilidad en la etapaDistribución de probabilidad en la etapa t t
1 0P P P
Por la ley de probabilidades totales, la distribución de probabilidad en la primera etapa se puede obtener así
0t tP P P
Pero esto nos permite pasar también a la segunda etapa, y así sucesivamente a cualquier etapa, multiplicando por la matriz de transición tantas veces como etapas haya que recorrer.

Tipos de estadosTipos de estados
Efímero. Ningún estado conduce a él.
Recurrente. Si no es transitorio, esto es, si tras pasar por él, la cadena de Markov siempre regresa a él.
Absorbente. Al llegar a él, ya no se sale a ningún otro estado.
Transitorio. Tras pasar por él, al cabo de cierto número de etapas, la cadena de Markov ya no regresa a él.

Distribución estacionaria y comportamiento Distribución estacionaria y comportamiento límitelímite
Definición. Л es una distribución estacionaria sobre E si Л P= Л .
1. Las distribuciones estacionarias otorgan probabilidad cero a los estados transitorios.
2. Cada grupo de estados recurrentes intercomunicados tiene una única distribución estacionaria.
3. Cuando el número de etapas converge a infinito,
0 0 y tt tP S P P P P S
4. Si Rt es el número de veces que la cadena pasa por el estado Ei en las t primeras etapas, cuando t tiende a infinito,
0 casi seguro.tR P St

Estimación de los parámetros de una cadena de Estimación de los parámetros de una cadena de MarkovMarkov
A partir de una realización de la cadena de Markov, se pueden estimar las probabilidades de transición mediante las siguientes proporciones observadas:
Numero de transiciones observadas de a ˆ
Numero de transiciones observadas desde i j
iji
E Ep
E
Esto presenta limitaciones dependiendo de cómo haya evolucionado la realización observada. Además, no permite estimar las probabilidades iniciales.
Por estos motivos es conveniente disponer de varias realizaciones de la cadena de Markov.
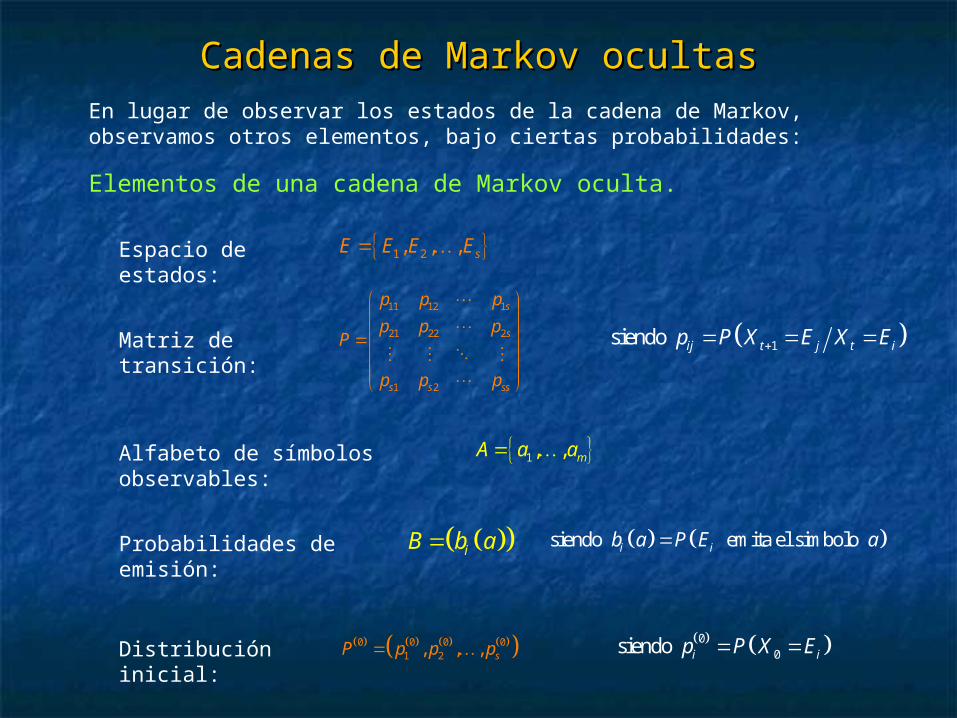
Cadenas de Markov ocultasCadenas de Markov ocultasEn lugar de observar los estados de la cadena de Markov, observamos otros elementos, bajo ciertas probabilidades:
Elementos de una cadena de Markov oculta.
1 2, , , sE E E E
11 12 1
21 22 2
1 2
s
s
s s ss
p p p
p p pP
p p p
Espacio de estados:
Matriz de transición:
1siendo ij t j t ip P X E X E
0 0 0 01 2, , , sP p p p Distribución inicial:
00siendo i ip P X E
1, , mA a a
iB b a
Alfabeto de símbolos observables:
Probabilidades de emisión:
siendo emita el simbolo i ib a P E a
Tres problemasTres problemas
Llamemos λ al conjunto de parámetros del modelo de Markov oculto, y
Problema 1. Calcular P ( O / λ ) .
1, , TO O O
a una realización de la cadena de Markov oculta.
Problema 2. Encontrar la secuencia de estados
1, , TX X X
que mejor se corresponda con la secuencia observada O, bajo el modelo λ .
Problema 3. Estimar los parámetros del modelo. Lo haremos buscando λ que haga máxima P ( O / λ ) .
Una primera ideaUna primera idea
Si supiéramos cuál ha sido la sucesión de estados, entonces
1 21 2,
Tx x x TP O X b O b O b O
La probabilidad de una sucesión de estados es
1 1 2 2 3 1
0
T Tx x x x x x xP X p p p p
Entonces, por la ley de probabilidades totales
1 1 2 2 3 1 1 2
01 2
,
T T T
X
x x x x x x x x x x TX
P O P X P O X
p p p p b O b O b O

Procedimiento Adelante/Atrás (Inducción)Procedimiento Adelante/Atrás (Inducción)
Definimos las funciones adelante así:
1 2, , , ,t T t ii P O O O X E
Las funciones adelante se pueden calcular por inducción así:
01 1i ii p b O Paso inicial
1 11
s
t t ji j tj
i j p b O
Inducción
1
s
Ti
P O i
Paso final

Definimos las funciones atrás así:
1 2, , , ,t t t T t ii P O O O X E
Las funciones atrás se pueden calcular por inducción así:
1T i Paso inicial
1 11
s
t ij j t tj
i p b O j
Inducción
1
s
Ti
P O i
Paso final

Algoritmo de ViterbiAlgoritmo de Viterbi
Buscamos la cadena de estados que mejor se corresponda con la secuencia observada (problema 2). Formalizamos esto en el objetivo siguiente:
1 2 1
1 2 1 1 2, , ,max , , , , , , , ,
tt t t i t
x x xi P x x x x E O O O
Estas funciones y los argumentos donde se alcanza el máximo se pueden calcular por inducción así:
01 1 1 0i ii p b O i Paso inicial
1 11, , 1, ,
max arg maxt t ij j t t t ijj s j s
i j p b O i j p
Inducción
* *max arg maxT T Ti i
P i x i Paso final
max ,XP O X
Definimos las funciones:
* *1 1t t tx x Secuencia de
estados

Estimación de los parámetros del modeloEstimación de los parámetros del modelo
Lo haremos por máxima verosimilitud y aplicaremos un método de tipo EM.
1, , ,t t i t ji j P x E x E O
Se pueden calcular a partir de las funciones adelante y atrás así:
max P O
Definimos las funciones:
1 1, t ij j t tt
i p b O ji j
P O
Además podemos considerar todas las transiciones que parten de un estado:
1
,s
t tj
i i j
01
1
11
1
:
1
ˆ
,ˆ
ˆ t k
i
T
tt
ij T
tt
T
tt O a
i T
tt
p i
i jp
i
i
b ki
Los parámetros estimados se actualizan de la siguiente manera:

AplicacionesAplicaciones
Modelos para familias de proteínasModelos para familias de proteínas Alineamiento de secuenciasAlineamiento de secuencias Descubrimiento de subfamiliasDescubrimiento de subfamilias Modelación de dominios dentro de la Modelación de dominios dentro de la
cadena de aminoácidoscadena de aminoácidos

Modelo para familias de proteínasModelo para familias de proteínas
m1
i1
d1
m2
i2
d2
m3
i3
d3
m4
i4
d4
m0
i0
m5

Alineamiento de secuenciasAlineamiento de secuencias
Una vez construido el modelo de Markov oculto y estimados sus parámetros, se puede emplear el modelo para reconstruir la sucesión de estados más probable que corresponde a cierta secuencia de aminoácidos.
Dicho de otro modo, a partir de una secuencia de aminoácidos podemos encontrar cuál es la sucesión de inserciones o supresiones que se han producido (con mayor probabilidad).
Ejemplo. Secuencias CAEFDDH y CDAEFPDDH. Modelo de longitud 10.
m0m1m2m3 m4d5d6m7m8m9m10
m0m1i1m2m3 m4d5m6m7m8m9m10
Entonces las dos secuencias se alinean así
Se ajustan las sucesiones de estados más probables y resultan
C _ A E F _ _ D D H
C D A E F _ P D D H
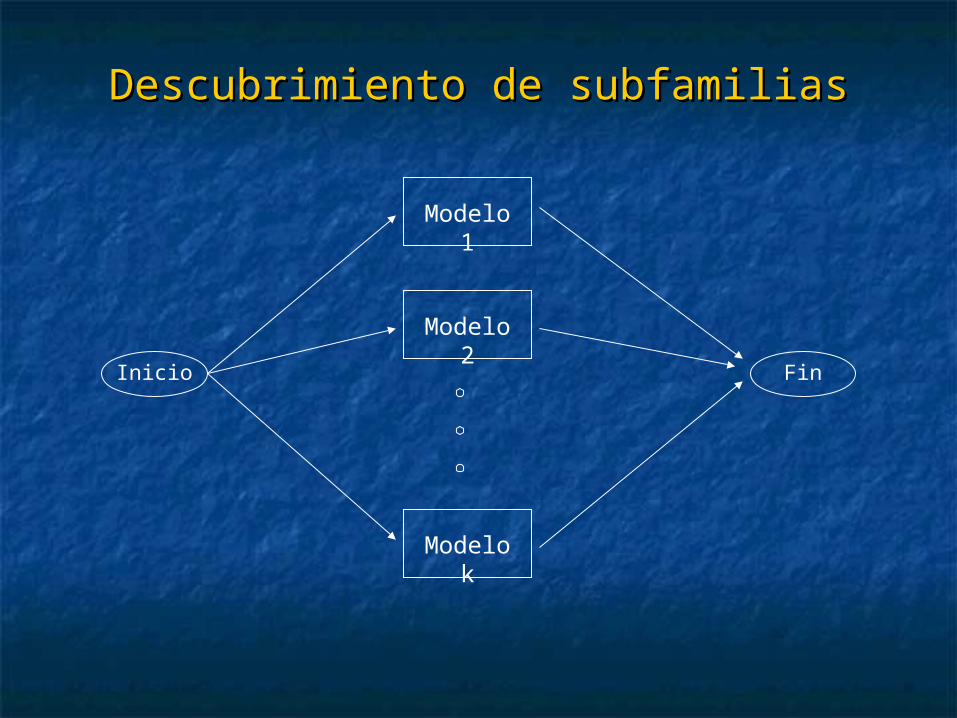
Descubrimiento de subfamiliasDescubrimiento de subfamilias
Modelo 1
Modelo 2
Modelo k
Inicio Fin

Modelación de dominios dentro de la cadena Modelación de dominios dentro de la cadena de aminoácidosde aminoácidos
Inicio Finm0 mN+1
Modelo para el dominio
IA ID