centro nacional de investigacion y desarrollo … · prueba de corriente directa 79 79 79 79 *...
TRANSCRIPT

S.E.P. S.E.I.T. D.Q.I.T.
CENTRO NACIONAL DE INVESTIGACION Y DESARROLLO TECNOLOGICO
cenidet DISEfiO E IMPLEMENTACION DE UN ACCIONADOR DE MOTOR DE C.A. TRIFASICO OPERANDO EN
REGIMEN PERMANENTE
T E S I S P A R A O B T E N E R E L G R A D O D E : M A E S T R O E N C I E N C I A S EN INGENIERIA ELECTRONICA P I I E S E N T A ~ lCoDOLF0 A. PCHAVARRIA SOLIS
DIRECTOR DE TESIS
DR. C E R C I 0 A. HORTA MEJIA
CUERNAVACA, MORELOS JUNIO 1995

Centro Nacional de Investigación y Desarrollo Tecnológico
ACADEMiA DE LA IvIAESTRh EN ELEC"R6NICA
FORMAR9 ACF2TACI6N DEL TRABAJO DE TEsls
Cuernavaca, Modos a 9 de Junio de 1995 . Dr. Sergio Alejandro Horta Mejia Jefe del Depto. de Ingeniería Electrónica Presente
Después de haber revisado el trabajo de tesis titulado, "DlSEfiO E IMPLEMENTACIdN DE UN
PERMANENTE", elaborado por el a l m o : Rodolfo Arturo Ecbavarrfa Solla, y dirigido por el Dr. Sergio A. Horta Mejfa, el trabajo presentado se ACEPTA para proceder a su impresi6n.
ACCIONADOR DE MOTOR DE C.A. TRIFASICO OPERANDO EN RÉGIMEN
A T E N T A M E N T E
A-.::- .f? '.....
&, M.I. ugo Calleja Gjumlich
I ~.
C.C.P.: Presidente de la Academia de Electrónica Director de tesis Expediente
Interior Internado Palmira S/N CP. 62490
Tela: (73) 18 77 41 y (73) 12 76 13

8 WP I SISTEMA NACIONAL DE INSTITUTOS “ECNOLOGICOS
Centro Nacional de Investigación y Desarrollo Tecnológico
Cuemavaca, Morelos a 14 de Junio de 1995.
Ing. Rodolfo Arturo Ediavarria Soils Candidato al grado de Maestro en Ciencias en Ingenieria Electrónica PreSaite
DapueS de haber somehdo a revisión su trabajo final de tesis tihilado: “DISEflO E IMPLEMENTACI6N DE UN ACCIONADOR DE MOTOR DE C.A. TRIFASICO OPERANDO EN &GIMEN PERMANENTE”, y habiendo cumplido con todas las indicaciones que el jurado &or de tesis le b, le comunico que se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
Reciba un cordial saludo.
.,J . .~ .. A T,EN T A M EN T E I
DI. Sergio A. Horia Mejia Jefe del Depto. de Electr6nica
C.C.P.: Jefe de Servicios Escolares Expediente
Interior lntemndo Pdmira s/N C.l? 62490
Teis.: (73) 18 77 41 y (73) 12 76 13

Este trabajo de tesis estb dedicado a:
Mis padres Rodolfo y Camela:
Gracias por su ejemplo de Fe, Trabajo y Amor, el mal marca mi camino.
Mis hermanos Juan, Joaquín, Jorge y Alelí:
Han sido mis mejores amigos. Gracias por todos los momentos compartidos.
Mi novia Lizbeth:
Graciaspor quererme y confiar tanto en mí. Te amo.

INDICE
~NDICE
LISTA DE SCMBOLOS LISTA DE FIGURAS INTRODUCCIÓN OBJETIVO Y CONTENIDO
IV Vil X XI1
CAPiTULO 1.- ESTUDIO DEL MOTOR DE INDUCCIÓN 1
1.1 .- Introducción 2 1.2.- Fundamentos teóricos 2
1.2.1 .- Principio de funcionamiento 2 1.2.2.- Concepto de deslizamiento 2
3 1.3.1 .- Análisis en régimen permanente 3 1.3.2.- Análisis electromagnético a 1.3.3.- Análisis del motor alimentado con fuente de corriente 12
de régimen permanente 14
1.3.- Análisis del motor de inducción
1.4.- Análisis de los métodos de regulación de velocidad basados en el modelo
1.4.1 .- Alimentación Volts/Hertz=constante 15 1.4.2.- Alimentación VoltslHertz compensada en bajas frecuencias 16 1.4.3.- Alimentación mediante fuente de corriente 19
CAPíTULO 11.- SELECCIÓN DE LA TOPOLOGiA DE CONVERSIÓN Y ESQUEMA DE CONTROL 20
11.1.- Introducción 21 11.2.- Topologias de conversión 21
11.2.1 .- Accionador con salida por tensión y onda cuadrada 21 11.2.2.- Accionador con salida por tensión y onda PWM 22 11.2.3.- Accionador con salida por corriente 23 11.2.4.- Accionador alimentado por tensión y salida en corriente 24
11.3.- Control de velocidad del motor de inducción 25 11.3.2.- Control de velocidad mediante variación de la tensión de estator 25 11.3.3.- Control de velocidad VoltslHertz constante 26 11.3.4.- Control de velocidad del accionador con salida por corriente 27 11.3.5.- Esquema óptimo 27
28 11.4.1 .- PWM programado 28 11.4.2.- PWM senoidal 28
11.4.- Selección de la técnica PWM
I

CAPiTULO 111.- ETAPA DE POTENCIA
111.1 .- Introducción 111.2.- Topología del inversor 111.3.- Selección de los dispositivos de potencia
111.3.1 .- Interruptores de potencia 111.3.2.- Módulo inteligente de IGBT's
111.4.- Tiempo muerto 111.5.- Circuitos impulsores 111.6.- Diseño térmico
30
CAPiTULO 1V.- ETAPA DE CONTROL
31 31 31 31 32 33 34 35
41
IV. 1 .- Introducción IV.2.- Señales de control para los dispositivos semiconductores de potencia
IV.2.1.- Generaci6n de la señal PWM IV.2.2.- Generación de la curva V/F compensada en bajas frecuencias
IV.3.- Protecciones al sistema IV.4.- Operación en lazo abierto
IV.4.1.- Respuesta en lazo abierto IV.4.2.- Identificación del proceso
lV.5.- Control de velocidad en lazo cerrado IV.5.1.- Sintonización del controlador IV.5.2.- Anelisis de estabilidad IV.5.3.- Esquema general del accionador
42 42 42 44 45 46 46 47 49 52 55 56
CAPíTULO V.- PRUEBAS Y RESULTADOS 58
V. 1 .- Introducción 59 V.2.- Pruebas y resultados 60
CAPíTULO VI.- CONCLUSIONES 75
VI. 1 .- Conclusiones V1.2.- Sugerencias para futuros trabajos
76 77
APÉNDICE A.- CARACTERIZACI~N DEL MOTOR 78
A.l.- Motor utilizado A.l. l .- Caracteristicas A.1.2.- Obtención de los parámetros A.1.3.- Prueba de corriente directa
79 79 79 79 *

INDICE
A.1.4.- Prueba sin carga A.1.5.- Prueba a rotor bloqueado A.1.6.- Obtención de los parámetros A.1.7.- Curvas características
REFERENCIAS
80 82 85 87
90

LISTA DE SlMBOLOS
LISTA DE SíMBOLOS.
Ángulo de disparo. Ángulo del factor de potencia. Ángulo del factor de potencia a rotor bloqueado. Constante de tiempo. Constante de tiempo derivativa. Constante de tiempo integral. Argumento de la impedancia del rotor. Velocidad del campo de alimentación. Velocidad del motor. Velocidad del rotor. Velocidad de referencia. Velocidad síncrona. Velocidad de deslizamiento. Flujo inducido en el entrehierro. Flujo inducido en el estator. Flujo máximo inducido en la rama magnetizante. Flujo inducido en el rotor. Analógico-digital. Transistor bipolar. Capacidad térmica. Corriente alterna. Capacidad de calor. Corriente directa. Constante de tiempo. Ciclo de trabajo del PWM. Digital-analógico. Incremento de potencia. Incremento de temperatura. Error. Tensión inducida en la rama magnetizante. Tensión instantánea inducida. Energia consumida en el apagado. Energia consumida en el encendido. Frecuencia. Frecuencia de alimentación. Frecuencia de deslizamiento. Fuerza magnetomotriz. Frecuencia de conmutación. Corriente de estator. Corriente de rotor. Corriente a rotor bloqueado. Corriente continua de colector. Corriente de CD.
IV

LISTA DE srMeoLos.
Corriente de alimentación para 10s impulsores, Corriente pico de colector. Corriente del diodo. Transistor bipolar de compuerta aislada. Corriente magnetizante. Corriente nominal. Corriente sin carga. Ganancia del sistema. Ganancia proporcional. Ganancia Última. Retardo. lnductancia de dispersión del sstator lnductancia de dispersión del rotor. lnductancia magnetizante. Par. Salida del controlador. Par máximo. Par nominal. Transistor de efecto de campo. velocidad síncrona. Número de polos. Potencia a rotor bloqueado. Pérdidas de cobre. Potencia disipada por cada diodo. Peso. Pérdidas por fricción, aire y núcleo. Proporcional-integral. Potencia mecánica. Potencia sin carga. Potencia total en el entrehierro. Potencia disipada por cada IGBT. Pérdidas en conducción. Pérdidas en conmutación. Potencia en régimen permanente. Potencia en régimen permanente. Periodo último. Modulación por anchura de pulso. Retardo. Resistencia térmica encapsulado-disipador del módulo de IGBT's. Resistencia térmica unión-encapsulado (IGBT). Resistencia térmica disipador-ambiente. Resistencia equivalente. Resistencia térmica unión-encapsulado.(diodo). Resistencia de rotor. Resistencia de estator.
V
S sc SmaX
Sn f2
t TA T.
deslizamiento. Nivel de disparo por cortocircuito. Deslizamiento de par máximo. Deslizamiento nominal. Tiempo en que el sistema alcanza un valor igual a 0.28 K. Tiempo en que el sistema alcanza un valor igual a 0.40 K. Temperatura ambiente. Temperatura en el encapsulado. Distorsión armónica total. Temperatura de unión en el diodo. Temperatura de unión en el IGBT. Tiempo muerto. Temperatura en el disipador. Tensión. Tensión fase-neutro de alimentación. Tensión a rotor bloqueado. Tensión de CD. Tensión colectoremisor de saturación. Tensión continua colector-emisor. Oscilador controlado por tensión. Tensión de alimentación para los impulsores. Tensión equivalente. Caída de tensión en sentido directo del diodo. Tensión nominal. Tensión sin carga. Inversor alimentado en tensión. Reactancia de dispersión del estator. Reactancia de dispersión del rotor. Reactancia equivalente. Reactancia magnetizante. Valor de estado estable del sistema. Impedancia térmica transitoria del IGBT. Impedancia térmica transitoria disipador-ambiente. Impedancia a rotor bloqueado. Impedancia sin carga.
VI

USTA DE FIGURAS.
LISTA DE FIGURAS
INTRODUCCI~N Figura A CAPíTULO 1 Figura 1.1.
Figura 1.2.
Figura 1.3.
Figura 1.4.
Figura 1.5.
Figura 1.6.
Figura 1.7.
Figura 1.8.
Figura 1.9.
CAPíTULO II Figura 11.1. Figura 11.2.
Figura 11.3. Figura 11.4.
Figura 11.5. Figura 11.6.
Figura 11.7. Figura 11.8.
Figura 11.9. CAPíTULO 111 Figura 111.1. Figura 111.2. Figura 111.3.
Figura 111.4. Figura 111.5.
Esquema general de un accionador de motor.
Circuito eléctrico equivalente del motor de inducción en régimen permanente. Equivalente Thevenin del motor visto desde la rama magnetizante. Curva típica pardeslizamiento de un motor de inducción. Definición de un punto nominal en un motor de inducción. Curvas par-deslizamiento, factor de potencia- deslizamiento y corriente de estatordeslizamiento. Circuito eléctrico equivalente anotando los flujos inducidos. Curva par-deslizamiento para un motor alimentado con fuente de corriente. Curvas par-velocidad con alimentación Volts-Hertz constante. Relación Volts-Hertz compensada en bajas frecuencias.
Accionador con salida por tensión y onda cuadrada. Tensión línea a línea de un accionador con salida por tensión y onda cuadrada. Accionador con salida por tensión y onda PWM. Accionador con salida por tensión y onda PWM utilizando un rectificador controlado. Accionador con salida por corriente. Control de velocidad mediante variación de la tensión de estator. Esquema general de control VoltslHertz constante.
\Esquema de control para un accionador con salida por corriente. Generación del PWM senoidal.
Topología del inversor utilizada. Módulo inteligente de IGBTs. Rama del inversor mostrando las señales de control con tiempo muerto. Esquema general del circuito de impulsores. Modelo térmico del puente trifasico.
XI
3
4
6
7
7
8
14
16
19
22 22
23 23
24 26
26. 27
29
31 33 34
34 35
VI1
USTA DE FIGURAS.
CAP~TULO IV. Figura IV.1.
Figura IV.2. Figura IV.3. Figura IV.4.
Figura IV.5. Figura IV.6.
Figura IV.7. Figura IV.8.
Figura IV.9. Figura IV.10. Figura IV . l l . Figura IV.12.
Figura IV.13. Figura IV.14.
CAP~TULO v. Figura V. I. Figura V.2. Figura V.3. Figura V.4. Figura V.5. Figura V.6.
Figura V.7.
Figura V.8.
Figura V.9
Figura V. 1 O. Figura V.11. Figura V. 12. Figura V.13.
Figura V.14. Figura V.15. Figura V.16.
Señales de control generadas por el circuito integrado HEF4752 correspondientes a una frecuencia de salida de 60 Hz. Esquema del generador de PWM trifásico HEF4752. Curva tensión-frecuencia compensada. Diagrama a bloques del circuito generador PWM manteniendo una relación VIF compensada en bajas frecuencias. Protección contra sobrecorriente del accionador. Esquema general de control de velocidad en lazo abierto. Respuesta del sistema a un escalón. Identificación del proceso mediante el método, de Broida. Algoritmos de control PI. Método de Ziegler-Nichols. Control proporcional-integral implementado. Diagrama a bloques del conjunto controlador- accionador-motor. Lazo de control analógico. Esquema general de control de velocidad con regulación del deslizamiento.
Esquema motor-carga implementado. Tensión colector-emisor a 60 Hz. Tensión entre fases a 60 Hz. Tensión colector-emisor durante el apagado. Tensión colector-emisor durante el encendido. Señales de control mostrando el tiempo muerto intercalado. Tensión y corriente del motor a 1500 rpm, con carga (52.5 Hz). Tensión y corriente del motor a 1200 rpm sin carga (40 Hz). Tensión y corriente del motor operando con carga a 1200 rpm (42.5 Hz). Respuesta a un escalón de 0-1200 rpm. Respuesta a un escalón de 0-1 800 rpm. Corriente de arranque. Corriente de una fase a 1800 rpm (60 Hz).
Contenido armónico a 1800 rpm, sin carga (60 Hz). Corriente de una fase a 1500 rpm (50 Hz). Contenido armónico a 1500 rpm. sin carga (50 Hz)
42
43 44 45
45 46
47 48
51 53 54 54
57 57
60 60 61 61 62 62
63
63
63
64 64 65 66
67 67 68
Vlll

USTA DE FIGURAS.
Figura V.17.
Figura V. 18. Figura V.19. Figura V.20. Figura V.21. Figura V.22. Figura V.23. Figura V.24. Figura V.25. Figura V.26.
Figura V.27. Figura V.28. APÉNDICE A. Figura A.1 . Figura A.2. Figura A.3.
Figura A.4.
Figura AS. Figura A.6. Figura A.7.
Figura A.8.
Corriente de una fase con el motor operando con carga a 1500 rpm.(52.5 Hz) Contenido a 1500 rpm, con carga (52.5 Hz). Corriente de una fase a 1200 rpm, sin carga (40 Hz) Contenido armónico a 1200 rpm, sin carga (40 Hz) Corriente de una fase a 900 rpm, sin carga (30 Hz). Contenido armónico a 900 rpm, sin carga (30 Hz) Contenido armónico a 900 rpm, con carga (35 Hz). Corriente de una fase a 450 rpm (15 Hz). Contenido armónico a 450 rpm (15 Hz). Corriente de una fase con el motor operando con carga a 450 rpm. (17.5 Hz). Corriente en el bus de CD. Tensión de rizo en el bus de CD.
Circuito para la prueba de CD. Esquema de la prueba del motor operando sin carga. Circuito equivalente del motor de inducción mostrando el efecto de la ausencia de carga mecánica. Circuito para la realización de la prueba a rotor bloqueado. Curva par-declizamiento. Curva corriente de estator-deslizamiento. Curvas pardeslizamiento, corriente de estator- deslizamiento. Curvas par-deslizamiento, corriente de estator- deslizamiento, factor de potenciadeslizamiento.
68
69 69 70 70 71 71 72 72 73
74 74
80 81 81
82
87 88 88
89
IX

INTRODUCC16N.
INTRODUCCI6N.
La electrónica de potencia involucra lo relacionado con la conversión y control de la energía eléctrica para distintas aplicaciones, tales como control de alumbrado, procesos electroquimicos, fuentes de alimentación, hornos de inducción, accionadores de máquinas eléctricas y compensación reactiva
La conversión de la energía eléctrica se puede clasificar como:
Rectificación, la cual consiste en la conversión de corriente alterna a corriente directa (CA-CD).
Conversión en corriente directa, que consiste en la conversión de corriente directa a corriente directa (CD-CD).
Inversi6n, que consiste en la conversión de corriente directa a corriente alterna (CD-CA).
. Conversión en corriente alterna, la cual consiste en la conversión de corriente alterna a corriente alterna (CA-CA).
En particular, los convertidores CD-CA tienen dos áreas de aplicación principales:
1. Sistemas de alimentación.- Para estos casos el convertidor funciona a frecuencia y tensión fija.
2. Control de motores de CA.- En estas aplicaciones el convertidor funciona a frecuencia y tensión variables.
Los motores eléctricos son utilizados ampliamente en la industria; los tres tipos básicos de motores son: el motor de CD, el motor de inducción y el motor síncrono. Los motores de CD habían dominado tradicionalmente el campo de los sistemas accionadores a velocidad variable, aunque este tipo de motor presenta las desventajas de que es caro, contiene un elemento de conmutación electromecánica (escobillas), requiere mantenimiento frecuente y resulta inadecuado para trabajar en atmósferas polvorientas o explosivas; presenta la ventaja de que su principio de funcionamiento y de regulación de velocidad es simple.
Por otro lado, el motor de inducción asíncrono presenta las ventajas de ser robusto, tiene una mayor relación potencia-peso, es adecuado para trabajar en atmósferas donde no se recomienda el motor de CD; sin embargo presenta el inconveniente de que su principio de regulación de velocidad es complejo, por lo que se utilizaba tradicionalmente en aplicaciones a velocidad fija.
X
INTRODUCC16N.
En los Últimos aiios, debido a los avances en la microelectrónica y en el desarrollo de los dispositivos semiconductores de potencia, esta desventaja ha sido superada, por lo que la tendencia actual indica la utilización del motor de inducción en aplicaciones de sistemas accionadores a velocidad variable.
Existen dos tipos principales de control de motores de CA: el control en régimen dinámico y control en régimen permanente. El primero se utiliza en aplicaciones donde es necesario una buena respuesta dinámica del sistema ante cambios en las referencias, además de una respuesta muy rápida ante perturbaciones; por ejemplo, en los sistemas de servoposicionamiento.
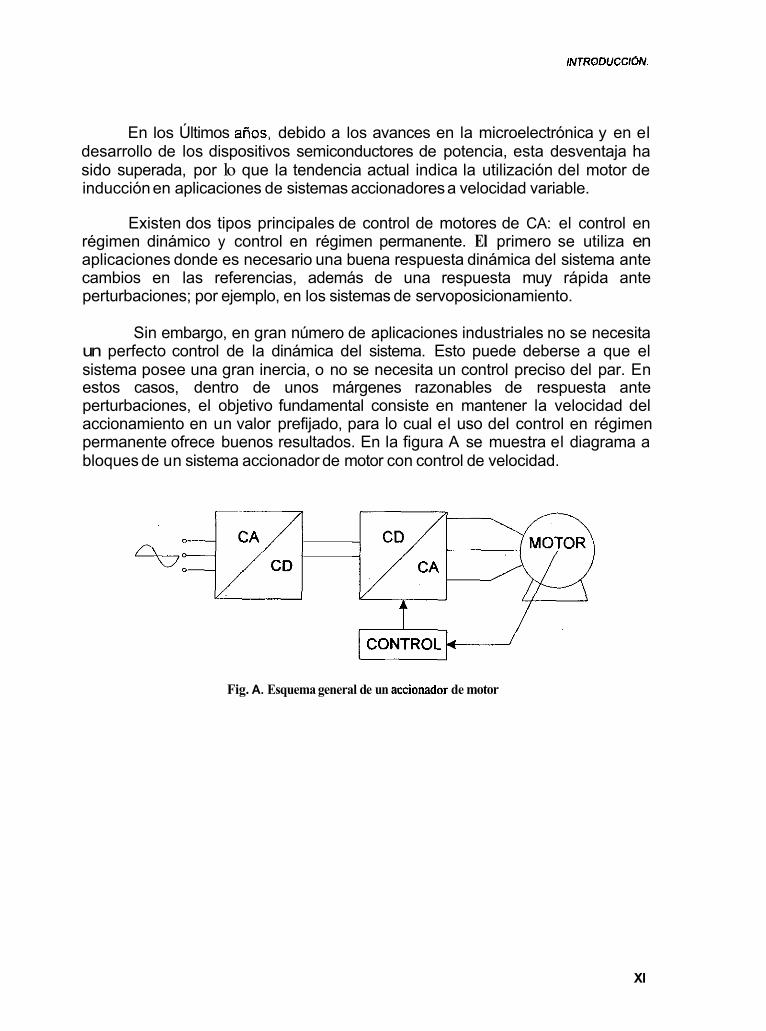
Sin embargo, en gran número de aplicaciones industriales no se necesita un perfecto control de la dinámica del sistema. Esto puede deberse a que el sistema posee una gran inercia, o no se necesita un control preciso del par. En estos casos, dentro de unos márgenes razonables de respuesta ante perturbaciones, el objetivo fundamental consiste en mantener la velocidad del accionamiento en un valor prefijado, para lo cual el uso del control en régimen permanente ofrece buenos resultados. En la figura A se muestra el diagrama a bloques de un sistema accionador de motor con control de velocidad.
Fig. A. Esquema general de un accionador de motor
XI
OsJEnVO Y CONTENIDO.
OBJETIVO.
El objetivo del presente trabajo consiste en desarrollar un accionador de motor de inducción trifásico, para controlar su velocidad en un rango definido. Un punto muy importante del esquema de control es la regulación del deslizamiento, con el propósito de limitarlo a un valor pequeño; esto presenta la ventaja de que el motor consuma una menor corriente y presente un factor de potencia alto. Para conseguir esto, se requiere hacer un estudio del funcionamiento del motor en régimen permanente.
El esquema de control se basa en el modelo del motor en régimen permanente y su implementación se realizará en lazo cerrado. Debe mantener las características propias del tipo de control, tales como mantener la velocidad en el valor prefijado y presentar una buena respuesta ante perturbaciones.
Resulta importante comentar que con este trabajo da inicio en CENIDET la línea de investigación en control de motores de corriente alterna.
CONTENIDO.
En el capítulo I se presenta un análisis electromagnético del motor de inducción basado en el circuito equivalente en régimen permanente, con el propósito de establecer las ecuaciones básicas. 'También se analizan las características de los distintos métodos de control basados en este modelo, con el propósito de seleccionar el óptimo.
En el capítulo II se describen las principales topologias de potencia utilizadas en los accionadores de motores, los esquemas de control en régimen permanente y las técnicas de modulación de anchura de pulso (PWM), con el propósito de establecer los tipos óptimos a utilizar en el accionador.
En el capítulo 111 se presenta el diseño de la etapa de potencia del inversor, inluyendo la selección del dispositivo semiconductor de potencia, el diseño térmico, y el diseño de los circuitos impulsores, todo esto de acuerdo a los parámetros del motor.
En el capítulo IV se presenta el diseño de la etapa de control. Se realiza la identificación del proceso, así como el diseño y sintonización del controlador en vista de mantener las caracteristicas de estabilidad deseadas. Asimismo se presenta la curva tensión-frecuencia compensada, considerando los parámetros del motor utilizado.
En el capítulo V se presentan las pruebas y los resultados obtenidos; se muestran lac formas de onda de corriente y tensión, así como el contenido armónico para distintas velocidades de operación y la respuesta que presenta el lazo de control.
_- OBJETIVO Y CONTENIDO.
En el capítulo VI se presentan las conclusiones del trabajo de tesis, asi corno las sugerencias para futuros trabajos en esta linea de investigación..
Finalmente, en el apéndice A se describe el procedimiento utilizado para la obtención de los parárnetros del motor, considerando la realización de distintas pruebas de laboratorio.
Xlll

CA PíTULO I
ESTUDIO DEL MOTOR DE INDUCCIÓN.

CAPiTULO I.- ANALISIS DEL MOTOR DE INDUCClbN
1.1.- INTRODUCCI6N.
La utilización cada vez mayor de los motores de inducción en aplicaciones de velocidad variable, con las ventajas que esto representa, es debida principalmente al desarrollo de la microelectrónica y de la electrónica de potencia. En este capítulo se realiza una revisión de los conceptos fundamentales del motor de inducción, así como un estudio del circuito equivalente basado en el modelo de régimen permanente, con el propósito de obtener algunas conclusiones fundamentales de los métodos de control.
1.2.- FUNDAMENTOS TEÓRICOS.
1.2.1.- PRINCIPIO DE FUNCIONAMIENTO.
En los motores de inducción los devanados del rotor están cortocircuitados, no requiriendo, por lo tanto, de una conexión eléctrica a los mismos. El nombre de este tipo de motor es debido a que la corriente del rotor se genera por inducción, debida al flujo en el entrehierro. También son llamados asíncronos, porque su velocidad de operación es ligeramente menor a la velocidad eléctrica del flujo del estator [l].
Cuando se aplica una tensión trifásica a los devanados de estator, fluyen corrientes trifásicas balanceadas en los devanados de cada fase. Como resultado se produce una fuerza magnetomotriz (FMM) en el entrehierro del motor. Su velocidad está dada por:
ó
4 7r.fi
120 f,
0, = - radlseg P
n, = - revlmin P
Donde os o ns es la velocidad de sincronismo, fi es la frecuencia de las tensiones y corrientes de alimentación, y p es el número de polos del devanado.
1.2.2.- CONCEPTO DE DESLIZAMIENTO.
La magnitud y frecuencia de las tensiones de rotor dependen de la velocidad del movimiento relativo entre el rotor y el flujo presente en el entrehierro,\ym. La velocidad del campo en el entrehierro está dada por la ecuación 1.1 Ó 1.2, la velocidad de deslizamiento expresa la velocidad del rotor relativa al campo y está dada por:
2

CAPITULO I.- ANALISIS DEL MOTOR DE lNDUCCf6N.
ó SI = 0, - W , radlseg
wrl = n, - n, revimin
(1.3)
(1.4)
Donde O, y n, representan la velocidad angular del rotor, en radianes por segundo y revoluciones por minuto respectivamente. El deslizamiento s, es una cantidad muy importante en el estudio del motor de inducción, y está dado por:
(1.5).
1.3.- ANÁLISIS DEL MOTOR DE INDUCCI~N.
1.3.1.- ANÁLISIS EN REGIMEN PERMANENTE.
A continuación se presenta el estudio del funcionamiento en régimen permanente del motor de inducción, basado en el circuito eléctrico equivalente, tal como se muestra en la figura I. I.
R Js
Fig. I. 1. Circuito eléctrico equivalente del motor de inducción en régimen permanente.
Este circuito representa el equivalente monofAsico en estrella, donde:
L, = Inductancia magnetizante. il = Corriente de estator. Ll = Inductancia de dispersión del estator. LÍ = Inductancia de dispersión del rotor. VI = Tensión fase-neutro de alimentación. XI = Reactancia de dispersión del estator. X I = Reactancia de dispersión del rotor.
Para el análisis del circuito, resulta conveniente utilizar el equivalente Thevenin visto desde la rama magnetizante, por lo que se reemplaza la malla constituida por la fuente de tensión Vi, la .resistencia de estator .R,, y las reactancias Xf, X,, por una fuente de tensión equivalente Ve, una resistencia
i2 = Corriente de rotor. im = Corriente magnetizante. X, = Reactancia magnetizante R, = Resistencia de rotor R, = Resistencia de estator.
3

CAPITULO I - ANALISIS DEL MOTOR DE INDUCC16N.
equivalente %, y una reactancia equivalente &, en serie con X2 y R,, tal como se muestra en la figura 1.2 [2].
V. P RJs v
Fig. 1.2. Equivalente Thevenin del motor visto desde la rama ma&izante.
De la figura 1.1, se observa que el valor de Ve, esta dado por la caida de tensión en L,, por lo que resulta:
I
v, x, ve = JR: f (XI + X,)* (1.6)
la impedancia equivalente Z., resulta del paralelo de R, y X,, con X,,,. Separando la parte real e imaginaria se obtienen las expresiones que definen a R, y a X i
R* xm R, = R: + (XI + X,)* \
(1.7)
El circuito de la figura 1.2 muestra el modelo de una fase del motor. La potencia total en el entrehierro para el caso de un motor trifasico esta dada por:
R Pot = 3 -..L i; S
(1.9)
la expresión que define las pérdidas de cobre en el rotor es: P,, = 3 i : R, = spot (1.10)
la potencia mecánica desarrollada es el resultado de la potencia de entrada al rotor menos las pérdidas de cobre en el rotor:
P,. = Pot - P," = Pot ( 1 - s) (1.11) 3
4

CAPfiULO 1.- ANALISIS DEL MOTOR DE INDUCCI6N.
el par desarrollado por el motor está dado por la potencia mecánica desarrollada entre la velocidad angular del rotor:
(1.12)
de la ecuación 1.5, se deduce:
(1.13)
por lo que, introduciendo las ecuaciones 1.11 J 1.13 en 1.12, el par desarrollado
4 . 0, = w , ( l - s)
queda expresado por: I
Pot ( I - s) - Pot - _ M = @ , ( I -SI 1 0,
introduciendo la ecuación 1.1 en 1.14, se obtiene: I
(1.14)
(1.15)
del circuito equivalente Thevenin, tambi6n se puede deducir la corriente de rotor, la cual queda expresada por:
ve I 1, = , (1.16)
introduciendo las ecuaciones 1.9 y 1.16 en 1.12, se obtiene la expresión del par en función del deslizamiento:
”=- derivando la ecuación 1.17 e igualando a cero, se obtiene:
I
(1.17)
(1.18)
5

CAPlTULO 1.- ANALISIS DEL MOTOR DE lNDUCCl6N.
al despejar s, se obtiene la expresión del deslizamiento de par máximo:
- %a -
Introduciendo la ecuación
(1.19)
19 en 1.17, se obtiene la expresión del par máximo, en la cual se observa que es independiente de la resistencia de rotor:
(1.20)
En base a la ecuaci6n 1.19 se deduce que existen dos puntos de par máximo, uno positivo y otro negativo. En la figura 1.3 se muestra la forma típica de la curva pardeslizamiento, donde se puede observar,el signo opuesto de los dos puntos de par máximo. El par máximo positivo, es menor que el par máximo negativo, debido al término (%+ RAS)' en la ecuacián 1.17.
A M- MOTOR +
FRENO
,-1 S
O /o. j I 20. o SIN CARGA'
GENERADOR ! :
Fig. 1.3. Cuma típica pardeslizamiento de un motor de inducción.
En la figura 1.4 se representa un punto nominal de funcionamiento, definido como aquel en el cual, alimentando el motor con una tensión nominal V,, consume una corriente nominal I,. El par proporcionado y el deslizamiento en este punto se denominan M. y sn, respectivamente. Asimismo, en la figura 1.5, se muestran la corriente consumida, el par desarrollado y el factor de potencia en función del deslizamiento.
6

CAPlTULO 1,- ANALISIS DEL MOTOR DE lNüUCCl6N.
M
* n \ , bLQ "
o. 9 4
Fig. 1.4. Definicih de un punto nominal en un motor de inducción.
M f l "
' A t
4 __ 3 __
I 1 * S O 8 0 % 0 4 0 2 O
Fig. IS. Curvas pardslizamiento, factor de potenciadeslizamiento y comente de estatordeslizamiento.
Del análisis realizado y observando las curvas mostradas, se pueden obtener las siguientes conclusiones:
1. La curva par-deslizamiento es prácticamente simétrica con respecto al punto donde s = O, en el cual se tiene la velocidad de sincronismo.
2. En la zona de pequetios deslizarnientos, el factor de potencia se mantiene alto y prácticamente constante. \
3. El consumo de corriente es proporcional al par en la zona de pequetios deslizarnientos, aumentando su valor cuando aumenta el deslizamiento. Este hecho condiciona el punto de máximo deslizamiento de trabajo, el cual, generalmente debe ser inferior al deslizamiento de par máximo smW
4. Existe un punto de par máximo en la zona de operación como motor.
7

CAPITULO 1.- ANALISIS DEL MOTOR DE INDUCC16N.
5. El par a plena carga es aproximadamente la mitad del valor del par máximo. Por lo tanto, el motor puede permitir sobrecargas de corto tiempo de duración.
6. La velocidad sin carga es casi igual a la velocidad sinmona, esto es sz0, y a plena carga es deslizamiento es de un valor muy pequeño.
7. El par de arranque (s= l ) es ligeramente mayor que el par a plena carga.
8. La máquina de inducción trabaja como generador cuando se opera a velocidades mayores que la velocidad de sincronismo, mientras que actúa como freno cuando se le obliga a girar en dirección inversa a la que está operando.
1.3.2.- ANALISIS ELECTROMAGNÉTICO.
El modelo de régimen permanente está basado en suponer constantes las inductancias del motor. Dado que las inductancias están definidas por la curva B- H del material empleado, la suposición anterior esta condicionada a que no exista saturación magnética, o que ésta sea constante o pequeña en todo momento. Para que esto ocurra, se debe mantener el valor del flujo dentro de unos márgenes adecuados. A continuación se realiza un análisis electromagnético del modelo del motor, con el fin de obtener algunas conclusiones fundamentales para el control en régimen permanente.
v ~ ~
Fig. 1.6. Circuito el&trim cquivalente anotando los flujos inducidos
En la figura 1.6 se muestra nuevamente el circuito equivalente, anotando los flujos inducidos, donde:
El = Tensión inducida en la rama magnetizante. ym = Flujo inducido en la rama magnetizante. y. = Flujo inducido en el estator. y, = Flujo inducido en el rotor.
8

CAPITULO 1.- ANAUSIS DEL MOTOR DE INDUCCIbN.
De la figura 1.6 se puede anotar lo siguiente: Y , =L, i , (1.21)
el flujo máximo inducido en la rama magnetizante queda definido por:
Y,, = AL,¡, 5rtz.- (1.22)
mientras que la corriente de rotor está dada por:
(1.23)
introduciendo las ecuaciones I. y 1.23 en 1.14, se obtiene la expresión del par eléctrico generado por el motor, en función de la tensión inducida en la rama magnetizante:
introduciendo la ecuación I. 1 se obtiene:
3pEt- 4 s M =
definiendo la velocidad del campo de alimentación como:
Ill1 =27I f,
(1.24)
(1.25)
(1.26)
dado que El es el valor eficaz de la tensión inducida en la rama magnetizante. podemos expresar, suponiendo alimentación senoidal, la tensión instantánea inducida e,, como:
e, = &E, msw,t
y como además el, está definido por: e, = w,y,,cosa,t
(1.27)
(1.28)
9
CAPITULO I - ANAUSIS DEL MOTOR DE lNOUCCl6N
introduciendo la ecuación 1.26 se obtiene:
e, =21rfl y,, cosa, t (1.29)
comparando las ecuaciones 1.28 y 1.29 se obtiene la expresión de la tensión inducida en función del flujo máximo y de la frecuencia de alimentación:
también se puede expresar el flujo máximo inducido en la rama magnetizante en función de la tensión y de la frecuencia de alimentación:
(1.31)
introduciendo la ecuación 1.30 en 1.25, se obtiene la expresión del par en función del deslizamiento y el flujo máximo inducido:
R
M= Ymax
3pZ-f, S 2
2[,:+(92]
derivando la ecuación 1.32 respecto a s, e igualando a cero se obtiene:
(1.32)
(1.33)
el deslizamiento de par mhximo se obtiene despejando s de la ecuación 1.33:
(1.34)
introduciendo la ecuación 1.34 en 1.32, se obtiene el valor del par máximo en función del flujo:
(1.35)
10

CAP/TULO I- ANALISIS DEL MOTOR DE INDUCC16N.
Se puede realizar un análisis semejante, desde otro punto de vista, si se expresa la potencia de entrada al rotor como:
Pot = 3 E , i , cosp, (1.36)
donde (p2 , representa el argumento de la impedancia del rotor y está dado por:
p2 = arctan - sx2 (1.37) R,
introduciendo las ecuaciones 1.30 y 1.36 en 1.14, se obtiene la expresión del par en función del flujo y la corriente de rotor:
3PYm, i 2 cosa2 2 f i
M = (1.38)
En la zona de pequeños deslizamientos, la componente resistiva es mucho mayor que la reactiva:
por lo tanto:
cosa2 E 1
entonces, el par queda expresado por:
3 P Y,, i 2 2 f i
M =
(1.39)
(1.40)
(1.41)
introduciendo las ecuaciones 1.23 y 1.30 en 1.41, y teniendo en cuenta la aproximación 1.39, se obtiene:
definiendo la frecuencia de deslizamiento como:
f, = s f,
(1.42)
(1.43)
se obtiene:
11
9 5 0 7 4 i

CAPfTULO 1.- ANAUSIS DEL MOTOR DE lNDUCCl6N.
(1.44)
Del análisis realizado se puede concluir lo siguiente:
1. El valor del par eléctrico máximo depende del cuadrado del flujo máximo (1.35). Si éste se mantiene constante en todo momento, se puede desarrollar siempre el par máximo. Esta es una conclusión fundamental al' momento de alimentar el motor a frecuencia variable.
2. El valor del flujo puede controlarse mediante la corriente. de magnetización (l.21), (1.22), o mediante la relación E,/f1,(l.31). Este es un resultado fundamental al momento 'de controlar el flujo del motor basándose en el modelo de régimen permanente.
3. En la zona de pequeños deslizamientos, el par es proporcional al producto del flujo y la corriente de rotor (1.41). Mientras mayor sea el valor del flujo (sin entrar en saturación), se necesita una corriente de rotor menor para generar el mismo par, disminuyendo por lo tanto las pérdidas por efecto Joule.
4. En la zona de pequeños deslizamientos, manteniendo como parámetro el flujo,
1.3.3.- ANALISIS DEL MOTOR ALIMENTADO .CON FUENTE DE
'.
el par es proporcional a la frecuencia de deslizamiento (1.44).
CORRIENTE.
A continuación se realiza un estudio de las características del motor cuando se alimenta con fuente de corriente, teniendo como parametro de control la corriente de estator. Las características del motor varían respecto de la alimentación mediante fuente de tensión, reflejándose esta variación en la curva pardeslizamiento, tal como se observa en la figura 1.7.
El análisis puede iniciarse introduciendo las ecuaciones 1.9, 1.1 y 1.26 en 1.14, obteniendo así la expresión del par en función de la corriente de rotor.
O R 30-
(1.45) k
analizando la figura 1.1 y mediante el divisor de corriente formado por X,,, y (R,/s+Xz),se obtiene la expresión para la corriente de rotor en función de la corriente de estator:
12
CAPITULO I: ANALISIS DEL MOTOR DE lNDUCCl6N.
i , = /*i’ (1.46)
de igual forma, se puede obtener la expresión para la corriente de magnetización en función de la corriente de rotor, la cual está dada por:
(1.47)
introduciendo la ecuación 1.46 en 1.45 se obtiene la expresión del par en función de la corriente de estator:
3pR, X i s M = (1.48)
para encontrar el deslizamiento de par máximo se deriva la ecuación 1.48 respecto a s, y se iguala a cero, obteniendo:
(1.49) 2 R:-s*(X,+X,) = O
despejando s se tiene:
(1.50)
introduciendo la ecuación 1.50 en 1.48, se obtiene la expresión del par máximo. la cual está dada por:
En la figura
(1.51)
1.7, se muestra la curva pardeslizamiento para un motor alimentado con fuente de corriente. Del análisis efectuado, se pueden anotar los siguientes puntos:
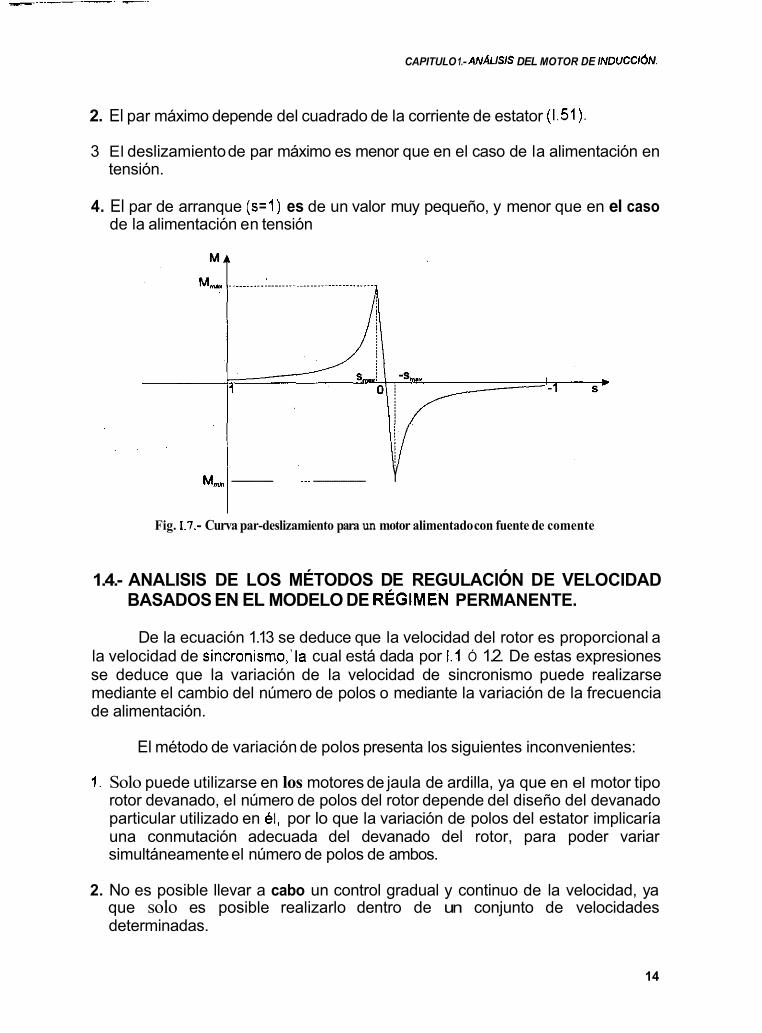
1. La ecuación 1.50 indica la presencia de dos puntos de par máximo de igual magnitud y diferente signo, por lo que la curva par-deslizamiento es totalmente simétrica respecto de la velocidad de sincronismo.
13
CAPITULO 1.- ANALISIS DEL MOTOR DE INDVCCibN.
M,,
2. El par máximo depende del cuadrado de la corriente de estator (1.51).
3 El deslizamiento de par máximo es menor que en el caso de la alimentación en
4. El par de arranque (s=l) es de un valor muy pequeño, y menor que en el caso
tensión.
de la alimentación en tensión
.................... ~~~ ....................... Y
Fig. 1.7.- Curva par-deslizamiento para un motor alimentado con fuente de comente
1.4.- ANALISIS DE LOS MÉTODOS DE REGULACIÓN DE VELOCIDAD BASADOS EN EL MODELO DE RÉGIMEN PERMANENTE.
De la ecuación 1.13 se deduce que la velocidad del rotor es proporcional a la velocidad de sincronismo,'la cual está dada por 1.1 Ó 1.2. De estas expresiones se deduce que la variación de la velocidad de sincronismo puede realizarse mediante el cambio del número de polos o mediante la variación de la frecuencia de alimentación.
El método de variación de polos presenta los siguientes inconvenientes:
1. Solo puede utilizarse en los motores de jaula de ardilla, ya que en el motor tipo rotor devanado, el número de polos del rotor depende del diseño del devanado particular utilizado en él, por lo que la variación de polos del estator implicaría una conmutación adecuada del devanado del rotor, para poder variar simultáneamente el número de polos de ambos.
2. No es posible llevar a cabo un control gradual y continuo de la velocidad, ya que solo es posible realizarlo dentro de un conjunto de velocidades determinadas.
14
CAFfTlJLO I: ANAUSISDEL MOTOR DE INDUCCI6N
3. Se requiere un motor especial, que posea los devanados necesarios y las terminales en el exterior para el intercambio de polos [3].
Otro método de control de velocidad consiste en variar la tensión de alimentación. De acuerdo a la ecuación 1.17, si se varia la tensión de alimentación se ve afectado el par del motor y el deslizamiento, variando asi la velocidad del rotor, de acuerdo a la ecuación 1.13. Aunque este método es útil para motores monofásicos de inducción pequeños, es el método menos recomendado para motores trifásicos, ya que el par de carga'se reduce considerablemente a medida que se reduce la tensión y la velocidad, por lo tanto, es aceptable su aplicación en un .motor parcialmente cargado, ya que en el instante que se le aplique al motor una carga apreciable, la regulación de velocidad puede ocasionar que el motor se detenga [4].
La mejor opción para controlar la velocidad del motor consiste en variar la frecuencia de alimentación, teniendo en cuenta el mantener par constante en todo el rango de velocidad. Tal como se mencionó en el análisis electromagnético, para desarrollar el par máximo se debe mantener el valor del flujo máximo vmax constante sin entrar en saturación (1.35), para lo cual existen.dos formas de conseguirlo:' manteniendo la relación El/fl constante (l.31), o manteniendo la corriente magnetizante Im constante (1.22).
El control del motor en régimen permanente se basa en estas dos formas de actuación. Para accionadores trabajando como fuente de tensión, la solución más inmediata y eficiente es mantener la relación El/fl = constante, con la correspondiente variación de la tensión de alimentación en función de la 'frecuencia y dando lugar a la alimentación Volts/Hertz=constante. Para accionadores. trabajando como fuente de corriente, el método de control consiste en mantener constante la corriente magnetizante teniendo como parámetro la corriente de estator.
1.4.1.- ALIMENTACIÓN VOLTS I HERTZ = CONSTANTE.
Suponiendo despreciable el efecto de la resistencia de estator, y dado el valor pequeño de la reactancia de dispersión de estator, se puede aproximar la tensión inducida en la rama magnetizante de la figura 1.6, por la tensión de alimentación:
E, z V, (1.52)
con lo que la relación Elif, se puede aproximar por la relación Vl/fl obteniendo la siguiente expresión para mantener constante el flujo:
15

CAHTULO I: ANklSlS DEL MOTOR DE INDUCCl6N.
Constante V 1= fi
(I. 53)
siendo el valor de la constante, la relación de la tensión y frecuencia nominales, por lo que se obtiene:
Bajo estas condiciones ideales, al mantener constante el valor del flujo para cualquier frecuencia de alimentación, se mantiene constante el valor del par máximo. El conjunto de curvas par-velocidad presenta por lo tanto una envolvente constante, tal como se puede observar en la figura 1.8.
Fig. 1.8. Curvas par-vel&idad con dimentación VolWHertz = Constante,
Una de las características básicas de este método, es que ante un par de carga constante, la frecuencia de deslizamiento para cualquier velocidad de trabajo es la misma (1.44), y por lo tanto, también es constante la corriente consumida (1.41 ), manteniéndose constantes las pérdidas por efecto Joule en todo el margen de velocidades [5].
1.4.2.- ALIMENTACIÓN VOLTSlHERTZ COMPENSADA EN BAJAS FRECUENCIAS.
A partir del circuito equivalente utilizado, se deduce que al disminuir la frecuencia, los valores de las reactancias disminuyen, por lo que la caída de tensión en el entrehierro es menor, resultando por lo tanto, significativa la caída de tensión en la resistencia de estator. Esto ocasiona que el par del motor disminuya de acuerdo a la ecuación 1.24. Este hecho se puede resumir en sus dos consecuencias fundamentales:
16

CAP/TULO 1.- ANALISIS DEL MOTOR DE INDUCC16N.
1. El par eléctrico máximo no se mantiene constante al disminuir la frecuencia.
2. Para un mismo par de trabajo a dos velocidades distintas, para la de menor frecuencia de alimentación se trabaja con un deslizamiento mayor, y por lo tanto, se consume una corriente mayor.
Para evitar este efecto, se debe mantener constante el valor del flujo en todo el rango de frecuencias, por lo que es necesario realizar una compensación de la relación VJf, en bajas frecuencias.
Del análisis de las figuras 1.1 y 1.6 se deduce:
E, = X,i, (1.55)
la corriente de rotor queda definida por:
mientras que la corriente de estator se puede definir como:
la relación de corrientes está dada por:
(1.56)
(1.57)
(1.58)
introduciendo 1.56 y 1.57 en 1.58, se obtiene:
definiendo los siguientes parámetros:
A = /& (1.60)
CAPlTULO 1.- ANALISIS DEL MOTOR DE lNDlJCCl6N.
la ecuación 1.59, se puede expresar como:
despejando V,, se obtiene:
"1 = r B C \A + I ] , ,
(1.61)
(1.62)
(1.63)
(1.64)
introduciendo 1.30 en 1.64 se obtiene la expresión de la tensión de alimentación en función de la frecuencia de alimentación, el deslizamiento y el flujo, la cual está dada por:
(1.65)
Enfocada al control en régimen permanente, la ecuación 1.65 puede resolverse para obtener la tensión de alimentación necesaria en función de la frecuencia de alimentación y del deslizamiento, para así obtener el par máximo en todo el rango de operación, mejorando el comportamiento del motor, sobretodo a bajas frecuencias.
Para poder resolver la ecuación 1.65 es necesario conocer los valores de las resistencias y reactancias del motor utilizado, para así obtener la curva tensión-frecuencia Óptima para el caso específico. Un método muy utilizado y que presenta resultados confiables consiste en realizar varias pruebas, tales como la del motor operando sin carga, a rotor bloqueado y la prueba de corriente directa, obteniendo los datos correspondientes, y así, mediante el uso de las ecuaciones que relacionan estos datos con las características del motor, obtener los valores de resistencias y reactancias del mismo [6] y [7]. En el apéndice A se presentan los resultados obtenidos de estas pruebas, para el motor utilizado en este trabajo.

CAPlTULO L- ANALISIS DEL MOTOR DE INDUCC16N.
Fig. 1.9. Relación VolWHertz compensada en bajas freniencias
1.4.3.- ALIMENTACIÓN MEDIANTE FUENTE DE CORRIENTE.
Otra forma de mantener el flujo máximo constante en todo el rango de frecuencias, consiste en mantener la corriente de magnetización constante, como puede observarse en la ecuación 1.22. En este caso, la corriente de magnetización se controla mediante la corriente de estator, estando la relación entre las mismas dada por 1.47. Debido a que cuando se alimenta el motor con fuente de corriente, se trabaja en un punto de operación inestable de la curva de operacibn par-deslizamiento, resulta necesario trabajar en lazo cerrado.
De la ecuación 1.47 se puede deducir. la' corriente de estator a partir de la corriente de magnetización, la cual está expresada por:
(1.66)
Esta forma de control presenta la ventaja respecto de la alimentación VoltslHertz constante, de que el par no disminuye con la frecuencia, aunque esta desventaja se puede superar, como ya se comentó, resolviendo la ecuación 1.65.
19

CAPíTULO 11
SELECCIÓN DE LA TOPOLOGíA DE CONVERSIÓN Y ESQUEMA DE CONTROL

CAPITULO 11.- SELECCl6NDELA TOPOLOG\ADE CONVERSIbN Y ESQUEMA DE CONTROL.
11.1.- INTRODUCCI~N.
La utilización de los sistemas accionadores a velocidad variable en los sistemas mecánicos ofrece una mejora en sus prestaciones, así como una mayor productividad y eficiencia. Este tipo de accionadores ha alcanzado un gran desarrollo en los últimos años, debido principalmente a dos factores: un gran avance en el desarrollo de los dispositivos semiconductores de potencia y de la microelectrónica, así como una mayor conciencia en Io que respecta al ahorro de energía [8].
Como ya se comentó, el motor de inducción ofrece ciertas ventajas respecto del motor de CD, sin embargo su principal desventaja radica en que su principio de regulación de velocidad es complejo. Debido al desarrollo antes mencionado, esta desventaja ha sido superada, por lo que la tendencia actual indica la utilización cada vez mayor de los motores de inducción en los sistemas accionadores a velocidad variable. Para apreciar la importancia del desarrollo de los sistemas accionadores, se puede anotar que en México, alrededor del 65% de la energía eléctrica producida se consume en los motores electricos [9]. Por otro lado, en la mayoria de las aplicaciones industriales no se requiere un control preciso de la velocidad (ventiladores, bombas, molinos, máquinas-herramientas). En estos casos la utilización de los métodos de control en régimen permanente significa la mejor alternativa [IO] y [ I l l .
En el presente capítulo se realiza un estudio de las principales topologías utilizadas en los accionadores, los esquemas de control en régimen permanente, y de las técnicas de modulación de ancho de pulso (PWM). Todo esto con el propósito de establecer la topología y el tipo de control Óptimo en el sistema accionador desarrollado.
11.2.- TOPOLOGíAS DE CONVERSIÓN.
11.2.1.- ACCIONADOR CON SALIDA POR TENSIÓN Y ONDA CUADRADA.
La figura 11.1 muestra el esquema general de un accionador que utiliza un inversor alimentado por tensión y salida en onda cuadrada. Este accionador está constituido básicamente por un rectificador y un inversor trifásicos El rectificador es del tipo controlado, por Io que entrega una tensión variable al inversor, el cual esta constituido por un puente trifásico y genera una salida variable en frecuencia y en tensión de la siguiente forma:
El inversor controla la frecuencia de alimentación del motor, as¡ como la secuencia de fases, determinando por lo tanto la velocidad y el sentido de giro.
21

CAPITULO 11.- S E c C l 6 N DE LA TOPoLOGlA DE CONVERS16N Y ESOUEMA DE CONTROL.
O
El rectificador controla la tensión en CD de entrada al inversor, y por lo tanto la tensión de alimentación al motor.
t+ n 211
LINEA TRIFASICA DE CA
Fig. 11.1 .- Accionador con salida por iensi6n y onda cuadrada
El accionador presenta una salida por tensión, debido al capacitor que se encuentra a la entrada del inversor. Generalmente cada tiristor del puente trifásico del inversor conduce i8Oo. La tensión línea a línea se muestra en la figura 11.2. Debido a que la tensión del bus de.CD se genera con un rectificador controlado, el factor de potencia es bajo, empeorando conforme la tensión de CD se reduce. Para mejorar el factor de potencia de entrada es necesario utilizar un rectificador sin controlar seguido de un convertidor CD-CD. Este tipo de accionador presenta la desventaja de un contenido armónico alto, lo cual introduce pulsaciones en el par del motor, por lo que ha sido ampliamente sustituido por el accionador con salida PWM, quedando restringido su uso para aplicaciones de gran potencia [12].
t
11.2.2.- ACCIONADOR CON SALIDA POR TENSIÓN Y ONDA PWM.
En el accionador con salida por tensión y onda PWM la tensi6n del bus de CD se mantiene fija, mediante la utilización de un rectificador sin controlar en la entrada; la frecuencia y la tensión de salida se controlan en el inversor mediante el uso, de la técnica PWM, siendo normalmente del tipo senoidal, cuyas características Se describen posteriormente. El esquema general de este tipo de' accionador se muestra en la figura 11.3.
22

CAPITULO I/.- SELECCl6N DE LA TOPOLOGlA DE CONVERSl6N Y ESQUEMA DE CONTROL.
R'= LINEA TRIFASICA DE CA
Q2 Q,
MOTOR
LINEA DE TRIFASICA CA &m{ ::iQ5$ Q,
Q2 Q,
MOTOR 4 Q, a,
Fig. 11.3.- Accionador con salida por tensión y onda PWM.
Aunque el contenido armónico se reduce significativamente en el accionador con salida por tensión y onda PWM, la eficiencia es menor debido al número de conmutaciones por ciclo; mientras que el hecho de utilizar un rectificador sin controlar en la entrada mejora el factor de potencia. Utilizando este tipo de accionador es posible una amplia y continua variación de la velocidad, prácticamente desde cero hasta la velocidad nominal del motor. Debido a la frecuencia de conmutación utilizada, los tiristores son reemplazados por transistores bipolares, tal como se muestra en la figura 11.3, transistores de efecto de campo (MOSFET), o transistores bipolares de compuerta aislada (IGBT), en aplicaciones de baja y media potencia.
Es posible reemplazar el rectificador sin controlar de la entrada por un rectificador controlado, con lo que la regulación de la tensión se realiza en la etapa rectificadora, mientras que el control de frecuencia.se realiza en el inversor con ayuda de la técnica PWM, sin embargo, esta topología presenta la desventaja de un factor de potencia muy bajo. El esquema del accionador con salida por tensión y onda PWM utilizando un rectificador controlado'se muestra en la figura 11.4
Fig. ii.4.- Accionador con salida por tensión y onda PWM utilizando un rectificador controlado
11.2.3.- ACCIONADOR CON SALIDA POR CORRIENTE.
En la figura 11.5 se muestra el esquema general del accionador con salida por corriente. En este tipo de accionador el inversor se alimenta con una fuente de corriente. constante. El rectificador puede ser del tipo controlado o sin controlar, para producir una onda de salida cuadrada o PWM como en los casos anteriores; la tensión que entrega el rectificador es transformada en corriente
23

CAPITULO II - SELECClbN DE LA TOPOLOGlA DE CONVERS16N Y ESQUEMA DE CONTROL
mediante la conexión de un inductor en serie: La frecuencia y corriente de salida se pueden controlar en forma análoga a los accionadores con salida en tensión.
LINEA TRIFASICA DE CA
Fig. 11.5.- Accionador con salida por comente.
Una ventaja del accionador con salida por corriente es que ‘elimina la posibilidad de un cortocircuito a la salida del mismo, con lo que se obtiene una mayor confiabilidad de la etapa de potencia. Sin embargo presenta algunas desventajas, entre las que se pueden mencionar las siguientes:.
No es posible operar el accionador sin carga
El inductor utilizado contribuye a un aumento en el costo de accionador y en el peso y tamaño del mismo.
Tal como se mencionó en el capítulo I , si se alimenta el motor con una fuente de corriente, se trabaja en un punto inestable de la curva par-deslizamiento, por lo que es necesario operarlo en lazo cerrado.
No permite alimentar varios motores en paralelo
11.2.4.- ACCIONADOR ALIMENTADO EN TENSIÓN Y SALIDA EN CORRIENTE.
El esquema de esta topología es similar al del accionador con salida por tensión y onda PWM. El inversor se encuentra alimentado en tensión, sin embargo, los interruptores de potencia se controlan de tal forma que la corriente de salida se mantenga en el mismo valor que una referencia senoidal fijada. AI controlar la corriente de alimentación del motor, éste ve una corriente fija en sus terminales, por lo tanto, el accionador se comporta como una fuente de corriente.
El control de la corriente de salida se denomina “bang-bang”, el cual consiste básicamente en una comparación con histéresic de la corriente de salida y la referencia. La tensión de salida se mantiene positiva mientras la corriente de
24

.--
CAPITULO 11.- SELECCIÓN DE LA TOPOLOGlA DE CONVERSIÓN Y ESQUEMA DE CONTROL.
salida sea inferior a la referencia, y negativa si la corriente de salida es mayor que la referencia. La frecuencia de conmutación y la forma de onda que presenta la corriente de salida dependen de la histéresis considerada; entre más pequeíia, se obtiene una frecuencia de conmutación mayor y un rizo de corriente menor.
Debido a la frecuencia de conmutación que resulta para valores aceptables de distorsión armónica en la corriente de estator, los dispositivos empleados son del tipo MOSFET o IGBT, por lo tanto se utiliza en aplicaciones de baja y media potencia.
11.3.- CONTROL DE VELOCIDAD DEL MOTOR DE INDUCCIÓN.
Existen varios métodos de control de velocidad del motor de inducción utilizando un accionador. La complejidad del método en particular y su comportamiento esperado están determinados por la naturaleza de la aplicación. Aunque generalmente a un control típico del motor se le identifica con un lazo de control de velocidad, existen otras aplicaciones en las cuales es necesario controlar el par, la corriente o la posición del mismo. El principal objetivo de un sistema de control de velocidad consiste en mantenerla en un valor de referencia, además de obtener una respuesta ante transitorios dentro de los márgenes especificados, aunque también debe de tomarse en cuenta. el comportamiento del mismo’en lo que respecta a la eficiencia y el contenido armónico.
11.3.1.- CONTROL DE VELOCIDAD MEDIANTE VARIACIÓN DE LA TENSIÓN DE ESTATOR.
La velocidad del motor puede controlarse mediante la variación de la tensión aplicada, de acuerdo a la ecuación 1.17. La figura 11.6 muestra el esquema general de un sistema de control de velocidad mediante la variación de la tensión de estator utilizando un convertidor CA-CA. La velocidad de referencia wret se compara con la velocidad del motor O,,,, el error resultante se conecta a un regulador de velocidad, el cual se recomienda sea del tipo proporcional-integral (Pi); en base a esta señal se generan los ángulos de disparo a de los tiristores que conforman el convertidor CA-CA., para variar así la tensión que entrega el accionador. Es posible agregar un lazo de realimentación para limitar la corriente de arranque, si esta excede la capacidad del controlador, sin embargo el hecho de restringir esta corriente tiene como efecto ‘un retraso en la aceleración del motor.
La desventaja que presenta esta topología consiste en que, como ya se comentó en capítulo I, al reducir la tensión de alimentación se reduce el par del motor, con lo que a bajas velocidades y operando a plena carga, el motor puede llegar a detenerse [13].
25

CAPITULO 11.- SELECCIÓN DE LA TOPOLOG/A DE CONVERSi6N Y ESQUEMA DE CONTROL
CONVERTIDOR CACA
CONTROLADOR CONTROL
u Fig. 11.6.- Control de velocidad mediante variación de la tensión de estator.
11..3.2.- CONTROL DE VELOCIDAD VOLTS I HERTZ CONSTANTE.
En la figura 11.7 se muestra el esquema general de control manteniendo una relación tensión-frecuencia constante, cuyas características se analizaron en el capítulo anterior. El comportamiento del sistema es el siguiente: el error generado por la diferencia de la velocidad de referencia oref y la velocidad del motor om, se aplica al controlador de velocidad, el cual se recomienda sea del tipo PI. La señal generada por este bloque de control es la velocidad de deslizamiento os,, la cual debe limitarse a un valor pequeño, en vista de trabajar con las características de operación con bajo deslizamiento planteadas en el inciso 1.3.1 ; os, se suma a o,,, para determinar la velocidad de sincronismo os. En base a esta señal se proporcionan la tensión y la frecuencia del accionador.
RECTIFICADOR rl
Fig. 11.7.- Esquema general de control Volts/He& constante con limitación del deslizamiento
26

CAPITULO 11.- SELECCldN DE LA TOPOLOGIA DE CONVERSlbN Y ESOUEMA DE CONTROL
La principal ventaja de este. tipo de control consiste en que es posible variar la velocidad del motor manteniendo siempre un par constante, teniendo en cuenta la compensación necesaria en bajas frecuencias, tal como se analizó en el capítulo anterior. Otra ventaja consiste en que es posible operarlo en lazo abierto, aunque esto puede ocasionar pequeñas variaciones en la velocidad del motor.
11.3.3.- CONTROL DE VELOCIDAD DEL ACCIONADOR CON SALIDA POR CORRIENTE.
Otra forma de control consiste en mantener constante la velocidad de deslizamiento, y controlar la velocidad del motor mediante el ajuste de la corriente de entrada del inversor, IcD, controlando asi la corriente de estator y, por lo tanto, la corriente de magnetización. El esquema general de este tipo de control se muestra en la figura 11.8. Cuando se aplica una referencia de velocidad ad, el motor acelera con una corriente ICD alta, la cual es proporcional al par, y cae a un valor bajo cuando el motor alcanza la velocidad de referencia. Un punto importante del control por corriente, como ya se comentó, es que no es posible operarlo a lazo abierto, como en el caso del control de los accionadores con salida por tensión.
CA I l l
DE RECTIFICADOR CORRIENTE DE VELOCIDAD
INVERSOR
Fig 11.8.- Esquema de contml para un accionador con salida por comente
11.3.4.- ESQUEMA ÓPTIMO.
En base a las características que presentan las topologías expuestas, se justifica la elección del accionador con salida por tensión y onda PWM. debido a que presenta una reducción del contenido armónico y permite una variación continua de la velocidad. El rectificador de la entrada es sin controlar, con el objeto de presentar un mejor factor de potencia a la línea de alimentación. El

CAPITULO If.- SELECc16N DE LA TOPOLOGlA DE CONVERSI~N Y ESOUEMA DE CONTROL
esquema de control óptimo para esta aplicación, está basado en mantener una relación VoltslHertz constante compensada en bajas frecuencias, con el propósito de desarrollar el par máximo en todo el rango de velocidad. También es necesario limitar el deslizamiento, para conseguir los beneficios ya comentados.
11.4.- SELECCIÓN DE LA TÉCNICA PWM.
El comportamiento de un accionador depende en gran forma del tipo de PWM utilizado, los cuales se pueden clasificar en dos tipos principales: PWM senoidal y PWM programado [14].
La principal ventaja de la aplicación de las técnicas PWM en accionadores de motores, consiste en la reducción del contenido armónico, además de que hacen posible la variación de la tensión y la frecuencia de salida ‘del inversor, sin necesidad de variar la tensión del busde CD (151.
11.4.1 .- PWM PROGRAMADO.
En este tipo de PWM, se seleccionan los armónicos que se desean eliminar y en base a ello se resuelve un sistema de ecuaciones no lineales para obtener. los ángulos de conmutaci6n requeridos, Las principales ventajas que presenta esta técnica son las siguientes:
Utilización de una frecuencia de conmutación baja, reduciendo por lo tanto las pérdidas de conmutación.
’ Buenas características de ganancia de tensión de la componente fundamental.
Eliminación selectiva de armónicos.
Sin embargo, cuando esta técnica es utilizada en aplicaciones de accionadores a frecuencia y tensión variables presenta serias desventajas, entre las que se pueden mencionar las siguientes:
Es necesario un circuito de control complicado para almacenar y accesar el
A bajas frecuencias ‘de operación, el número de conmutaciones es muy grande
número de patrones de conmutaciones requerido.
para ser evaluado analíticamente.
11.4.3.- PWM SENOIDAL.
La. genera.ción del patrón PWM senoidal “original” se muestra en la figura 11.9. Se obtiene mediante la comparación de una setial moduladora con forma de
28
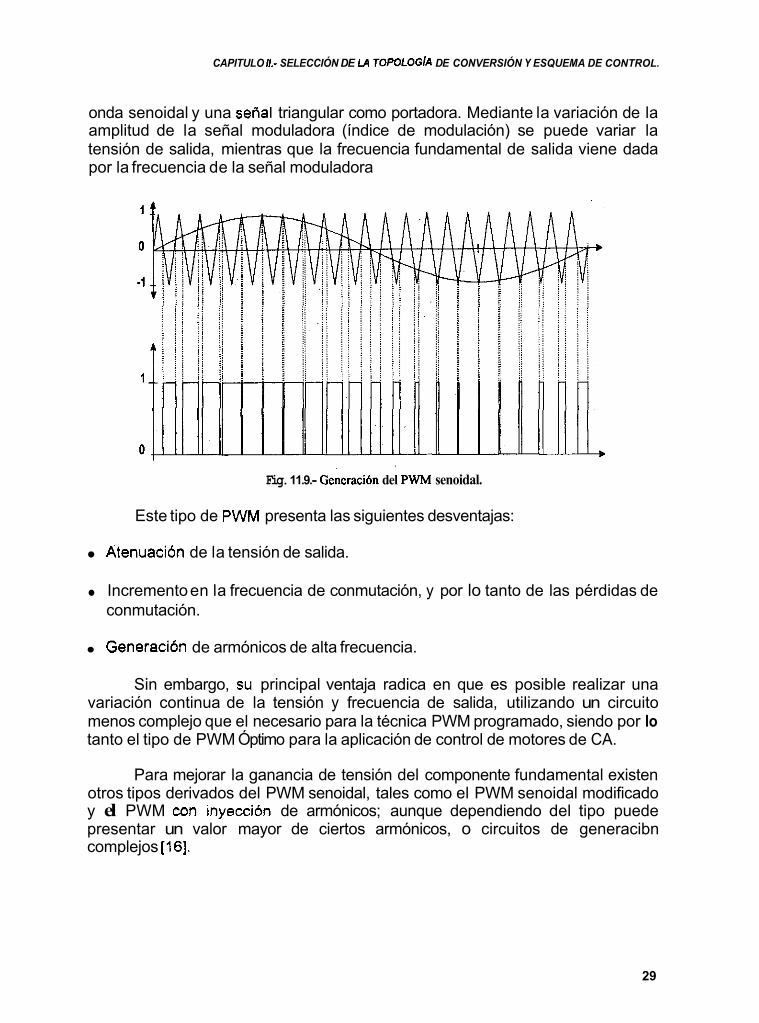
CAPITULO 11.- SELECCIÓN DE U TOPOLOGlA DE CONVERSIÓN Y ESQUEMA DE CONTROL.
onda senoidal y una setial triangular como portadora. Mediante la variación de la amplitud de la señal moduladora (índice de modulación) se puede variar la tensión de salida, mientras que la frecuencia fundamental de salida viene dada por la frecuencia de la señal moduladora
Fig. 11.9.- Gencracih del PWM senoidal.
Este tipo de PWM presenta las siguientes desventajas:
Atenuacibn de la tensión de salida.
Incremento en la frecuencia de conmutación, y por lo tanto de las pérdidas de conmutación.
Generacibn de armónicos de alta frecuencia.
Sin embargo, su principal ventaja radica en que es posible realizar una variación continua de la tensión y frecuencia de salida, utilizando un circuito menos complejo que el necesario para la técnica PWM programado, siendo por lo tanto el tipo de PWM Óptimo para la aplicación de control de motores de CA.
Para mejorar la ganancia de tensión del componente fundamental existen otros tipos derivados del PWM senoidal, tales como el PWM senoidal modificado y el PWM con inyecci6n de armónicos; aunque dependiendo del tipo puede presentar un valor mayor de ciertos armónicos, o circuitos de generacibn complejos [16].
29

CA PíTlJLO Ill
ETAPA DE POTENCIA

CAPlTULO 111.- ETAPA DE POTENCIA.
D. FUENTE -2‘
TRIFASICA DE CA
D.
111.1 .- INTRODUCCI6N.
Del análisis realizado en los capítulos anteriores, se deduce la topología emp’eada en el convertidor CD-CA, la cual es el inversor alimentado en tensión (VSI). En este capítulo se describe la implementación de la etapa de potencia del inversor, la selección del dispositivo de potencia y el diseño térmico.
D, iz 0, LS C
- 21 0, 2k 4
I I I
111.2.- TOPOLOGiA DEL INVERSOR.
En la figura 111.1 se muestra el esquema de potencia utilizado. El valor de la tensión de CD es 310 V, para generar una tensión línea a línea de 220 Vrms.
111.3.- SELECCIÓN DE LOS DISPOSITIVOS DE POTENCIA.
111.3.1 .- ANALISIS DE ALTERNATIVAS.
El transistor bipolar de potencia (BJT) es un dispositivo en el cual la corriente de colector es controlada mediante la corriente de base. Presenta una ganancia de corriente pequeña. Su frecuencia de conmutación es baja, y para su buen funcionamiento resulta necesario utilizar una red de amortiguamiento (“snubbei). Se utiliza principalmente en aplicaciones de media potencia y baja frecuencia de conmutación.
El transistor de potencia. MOSFET es un dispositivo controlado por tensión en la compuerta, sus tiempos de apagado y encendido son muy pequeños, mientras que su frecuencia de conmutación es alta. Sin embargo su principal desventaja consiste en que presenta una caída de conducción considerable, lo que incrementa las perdidas. Es un dispositivo muy utilizado en aplicaciones de baja potencia y alta frecuencia, tales como fuentes conmutadas [I 71.
El transistor bipolar de compuerta aislada (IGBT). es básicamente un híbrido de transistor bipolar y MOSFET, que combina las características de ambos. Presenta una alta impedancia de entrada, como un MOSFET, y además sus características de salida.son similares a las de un transistor bipolar, por lo
31

CAPITULO 111.- ETAPA DE POTENCIA.
tanto es posible manejar una gran coiriente.de salida accionándolo con un valor de tensión pequeño en la compuerta.
El IGBT tiene una capacidad de potencia comparable a la de un transistor bipolar, pero su frecuencia de operación es'mayor. Las características por las que este dispositivo es utilizado ampliamente en aplicaciones de media potencia son además de las ya mencionadas, la simplicidad de los circuitos de compuerta necesarios, capacidad .de integración,' y que en algunos casos es posible una operación sin snubber.
Este tipo de dispositivo se utilizó en el puente trifásico del inversor en el accionador desarrollado, debido a ¡as características mencionadas: Se utilizó en forma integrada. en un módulo que contiene' seis dispositivos, tal como se describe a continuación.
111.3.2.- MÓDULO INTELIGENTE DE IGBT's.
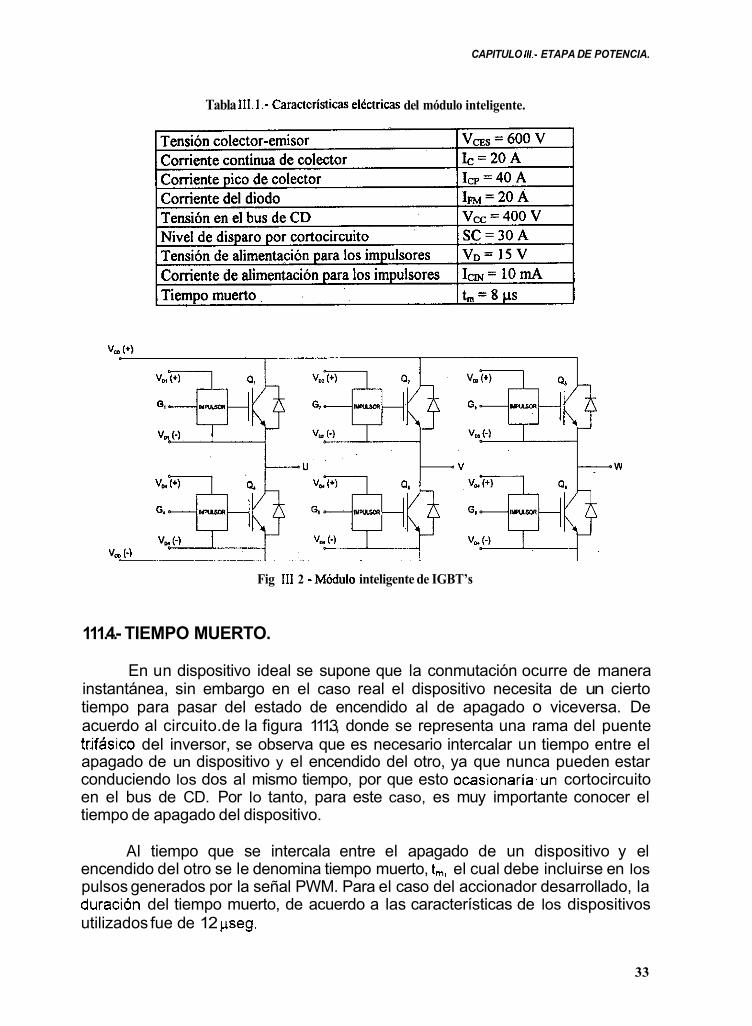
De acuerdo al apéndice A, la tensión y corriente nominal del,motor son 220 V y 3 A; de acuerdo a estos valores, el módulo seleccionado es del tipo inteligente PM20CEA060, fabricado por POWEREX, el cual está constituido por un puente trifásico de IGBT's. AI estar integrados los dispositivos en un solo encapsulado presenta las ventajas de que se elimina el efecto de las inductancias parásitas, y facilita el montaje.
Sus características principales son [I 81:
Circuitos impulsores integrados.
Lógica de protección contra:
- Cortocircuito
- Sobrecorriente
- Sobretemperatura.
- Baja tensión.
El esquema general del módulo inteligente utilizado, se muestra en la figura 111.2. Las características eléctricas principales del módulo se muestran en la tabla 111.1.
32
CAPITULO MI: ETAPA DE POTENCIA.
Tabla 111.1.- Caraacrísticas el6ctncas del módulo inteligente.
v, (4
Fig 111 2 -Módulo inteligente de IGBT’s
111.4.- TIEMPO MUERTO.
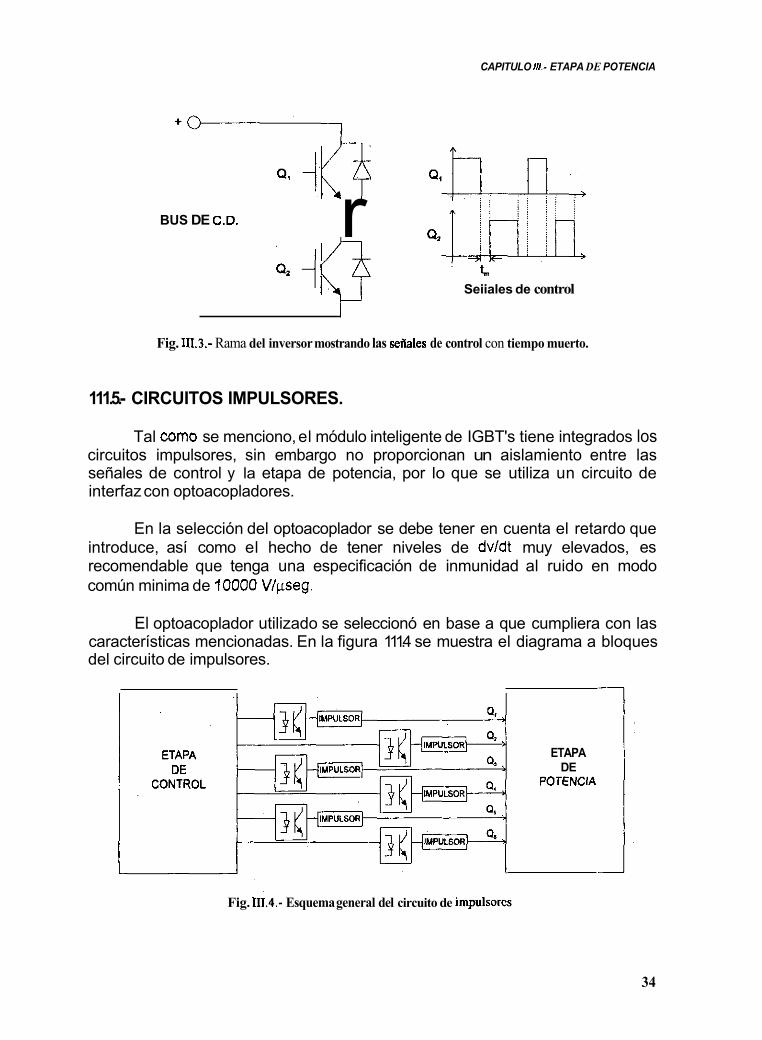
En un dispositivo ideal se supone que la conmutación ocurre de manera instantánea, sin embargo en el caso real el dispositivo necesita de un cierto tiempo para pasar del estado de encendido al de apagado o viceversa. De acuerdo al circuito.de la figura 111.3, donde se representa una rama del puente tcifásico del inversor, se observa que es necesario intercalar un tiempo entre el apagado de un dispositivo y el encendido del otro, ya que nunca pueden estar conduciendo los dos al mismo tiempo, por que esto ocasionaria.un cortocircuito en el bus de CD. Por lo tanto, para este caso, es muy importante conocer el tiempo de apagado del dispositivo.
AI tiempo que se intercala entre el apagado de un dispositivo y el encendido del otro se le denomina tiempo muerto, t,. el cual debe incluirse en los pulsos generados por la señal PWM. Para el caso del accionador desarrollado, la duraci6n del tiempo muerto, de acuerdo a las características de los dispositivos utilizados fue de 12 p e g .
33
CAPITULO 111- ETAPA DE POTENCIA
r BUS DE C.D.
u
b Seiiales de control
Fig. 111.3.- Rama del inversor mostrando las sefíaies de control con tiempo muerto.
111.5.- CIRCUITOS IMPULSORES.
Tal como se menciono, el módulo inteligente de IGBT's tiene integrados los circuitos impulsores, sin embargo no proporcionan un aislamiento entre las señales de control y la etapa de potencia, por lo que se utiliza un circuito de interfaz con optoacopladores.
En la selección del optoacoplador se debe tener en cuenta el retardo que introduce, así como el hecho de tener niveles de dvldt muy elevados, es recomendable que tenga una especificación de inmunidad al ruido en modo común minima de 10000 Vipseg.
El optoacoplador utilizado se seleccionó en base a que cumpliera con las características mencionadas. En la figura 111.4 se muestra el diagrama a bloques del circuito de impulsores.
ETAPA DE
POTENCIA
Fig. 111.4.- Esquema general del circuito de impulsorcs
34

CAP/TULO MI.- ETAPA DE POTENCIA
111.6.- DISEÑO TÉRMICO.
Es necesario analizar el comportamiento térmico de la etapa de potencia del circuito inversor, con objeto de evaluar la resistencia térmica disipador- ambiente, R~sA, necesaria para evitar que, bajo la peor condición de carga se alcance la temperatura de uni6n máxima, Tj,,, de los dispositivos de potencia, lo que provocaría su destrucción [19].
El punto de partida para este análisis es considerar un modelo térmico del puente trifásico utilizando una analogia eléctrica, la cual se muestra en la figura 111.5.
Fig. 111.5.- Modelo lkrmico del puente trifásico.
La resistencia térmica disipador ambiente para este caso está dada por:
donde:
TJQ = Temperatura de union en el IGBT.
R~JC = Resistencia térmica unión encapsulado (IGBT).
(111.1)
Rewc = Resistencia térmica unión-encapsulado (diodo).
Recs = Resistencia térmica encapsulado-disipador del módulo de IGBT's
R ~ A = Resistencia térmica disipador-ambiente.
Pci = Potencia disipada por cada IGBT
Po = Potencia disipada por cada diodo
35

CAP/TULO Ill: ETAPA DE POTENCIA.
Para poder resolver esta ecuación, resulta necesario conocer las pérdidas en los dispositivos de potencia. A continuación se presentan las expresiones que las definen:
A) PBrdidas en los IGBT's.
Las pérdidas totales en cada IGBT son la suma de las pérdidas en conducción, Pss y las pérdidas en conmutación, PSW:
P, =P, + PSW
donde:
(111.2)
(111.3)
(111.4)
siendo:
Icp = Valor pico de la corriente de salida.
VCECSAT) = Tensión de saturación del IGBT.
O = Ciclo de trabajo del PWM.
0 = Angulo de fase entre la tensión y la corriente de salida
ESW~ON) = Energía de conmutación de encendido del IGBT por pulso, a la corriente pico Icp.
ESW(OFF) = Energía deconmutación de apagado del IGBT por pulso, a la corriente pico Icp.
fsw = Frecuencia de conmutación del PWM.
6 ) Pérdidas en los diodos.
La expresión que define las pérdidas en los diodos está dada por:
(111.5)
36

CAPITULO 111.- ETAPA DE POTENCIA.
donde:
VFM = Caída de tensión en sentido directo del diodo.
En el caso de los patrones PWM senoidal utilizados, los tiempos de con- ducción de cada dispositivo son del 50%, mientras que la frecuencia de conmutación es 1 KHz. El factor de potencia que presenta el motor, operando con carga y a un bajo deslizamiento es alto, por lo que se propone un valor para cos0 de 0.90. Por lo tanto se tiene:
D = 0.50 fssw = I K ~ Z cose = 0.90
Los valores de las resistencias térmicas obtenidos de las hojas de datos son:
RoJC = 2.5 OCNV ReoJc = 4.5 "CNV Rss = 0.5 "C/w
La temperatura de unión maxima permitida para el IGBT es de 150 "C, mientras que la temperatura máxima del encapsulado es 90 "C. Dando un margen de seguridad se propone:
Tj=115"C T ~ z 3 5 " C
Como primer punto se realiza el diseño térmico para el caso del motor operando con una corriente igual a la nominal, por lo que la corriente de pico es:
lcp = 4.5 A
De las hojas de datos del modulo se obtiene [13]:
VCE(SAT) = 1.45 V VFM = 1.3 V ESW(ON) = 0.4 mJ
Sustituyendo los valores anteriores en 111.2, 111.3, 111.4 y 111.5, se obtiene:
- Y 2. s'
Esw(oFn = 0.3 mJ
PSS- 1.13 W Psw=0.22 W Pa= 1.35 W PD= 0.45W
sustituyendo en 111.1 resulta:
37

CAPITULO 111.- ETAPA DE POTENCIA.
De acuerdo a este valor, se selecciona un disipador que presente una resistencia térmica menor. El disipador utilizado es del modelo 4330 de aluminio tipo "aluetch" [20], el cual para una longitud de 13 cm tiene una resistencia térmica igual a:
&A = 1.45 "CNV
con esto se asegura que la temperatura de unión no alcanzará el valor máximo, con el motor operando a los valores nominales.
Las expresiones que definen las temperaturas en los distintos puntos del sistema son:
Temperatura en el disipador:
(111.6)
Temperatura en el encapsulado:
T, = (P, + PD)R, + T, (111.7)
Temperatura de unión en el IGBT:
(111.8)
Temperatura de unión en el diodo:
T, = P, R,, + T, (I 11.9)
sustituyendo los valores correspondientes se obtiene:
T~ = 50.66 "CNV T~ = 51 . ~ ~ ~ c N v TJQ = 54.93 QCNV TJD = 53.58 OCNV
los cuales son valores dentro de lo especificado.
La peor condición de carga del sistema es la del motor operando a rotor bloqueado a la tensión y frecuencia nominal, con lo que la corriente de pico sería aproximadamente:
Icp=15A
A partir de este valor, y utilizando las hojas de datos del módulo se obtiene:
VCE(SAT) = 2.3 V V.=,., = 2 V ECW(~,,) = 1.3 mJ ES~(OFF) = 1.3 mJ
38
CAPITULO 111.- ETAPA DE POTENCIA.
Sustituyendo los valores anteriores en 111.2, 111.3, 111.4 y 111.5, se obtiene:
Pss = 5.96 W Pcw = 0.83 W PQ = 6.79 W PD = 2.32 W
sustituyendo en 111.1, se obtiene la resistencia térmica necesaria para que el motor opere a rotor bloqueado, sin que se alcance la temperatura de union máxima:
&A = 1 .O7 "CNV
Esta resistencia térmica es menor que la del disipador utilizado, sin embargo, a partir de la impedancia térmica disipador-ambiente es posible obtener el tiempo que puede operar el motor bajo estas condiciones sin que se alcance la temperatura de unión. Para realizar esto, se debe considerar la impedancia térmica transitoria, es decir, la variación de la resistencia térmica en función del tiempo. Esta impedancia se divide en dos: la impedancia térmica transitoria del dispositivo, la cual se puede obtener en [21], y la impedancia térmica transitoria del disipador, cuyo cálculo se presenta a continuación [22].
La impedancia térmica disipador-ambiente está dada por la siguiente expresión:
z,, = R ~ ~ [I - e %) (I I I. 1 O)
donde CT representa la constante de tiempo y es igual al producto de la resistencia térmica por la capacidad térmica (Ces):
CT= R,, C, (111.11)
La capacidad térmica está definida por:
c, = c, P, (111.12)
donde:
CC = Capacidad de calor.
P. = Peso.
para el disipador utilizado se tiene:
Cc=897.3 W s I Kg "C
P. = 250 gr
39

CAPrTULO 111.- ETAPA DE POTENCIA.
introduciendo estos valores en 111.12 se obtiene:
Ce = 224.32 W S I "C
sustituyendo este valor en 111.1 1:
CT = 325.26 s
Se ha considerado en los cálculos una temperatura maxima de unión igual a 115 O C , es decir, se permite un incremento de temperatura (DT) igual a 35 "C. Por otra parte el incremento de potencia permitido (DP) se define como la potencia transitoria (P,,) menos la potencia en régimen permanente (PT).
DP=P, - P, (111.1 3)
De acuerdo a los valores de Po y PD obtenidos, la potencia transitoria y la potencia en régimen permanente disipada por cada dispositivo es:
Pt,=9.11 w PT = 1.8 W
La potencia transitoria puede definirse por la siguiente expresión:
(111.14) DT P, = + PT
=,A + zelc + R,
donde Lc representa la impedancia térmica transitoria del dispositivo, la cual, para un tiempo mayor a 10 segundos aproximadamente, es igual a Rwc.
Resolviendo las ecuaciones 111.10 y 111.14 para distintos valores de t, se obtiene que el disipador soporta la potencia transitoria especificada hasta un tiempo aproximado de 25 minutos. Sin embargo, sustituyendo los valores encontrados en la ecuación 111.7, se encuentra que para un tiempo igual a 720 segundos (12 minutos), se alcanza una temperatura en el'encapsulado de 105 "C, lo que activa la protección contra sobretemperatura del sistema.
40

E
CAPíTULO IV
4PA DE CONTROL

--
CAPITULO /V.- ETAPA DE CONTROL.
1v.1.- INTRODUCCI~N.
En este capítulo se presenta el diseño de la etapa de control del inversor, la cual se basa en las especificaciones del control en régimen permanente planteadas en los capítulos anteriores: una buena regulación de velocidad y respuesta aceptable ante transitorios Asimismo se presenta el esquema de control de velocidad en lazo cerrado con regulación del deslizamiento, y de la generación de la curva tensión-frecuencia compensada.
iV.2.- SEÑALES DE CONTROL PARA LOS DlSPOSlTiVOS SEMICONDUCTORES D i POTENCIA.
IV.2.1.- GENERACIÓN DE LA SEÑAL PWM.
La técnica PWM utilizada fue del tipo senoidal, para lo cual se contó con un circuito integrado de propósito específico; HEF4752, el cual está diseñado para aplicaciones en control de motores de CA trifásicos [23].
Este circuito presenta la ventaja de eliminar la complejidad de los circuitos necesarios para la generación del PWM, disminuye el costo, y no presenta variaciones con la temperatura. .Es completamente digital, por lo que la frecuencia de conmutación es siempre un múltiplo exacto de la frecuencia de salida del inversor, esto da como resultado un equilibrio de fase y tensión. Se utilizan diferentes múltiplos de la portadora dependiendo de la frecuencia de trabajo; para el margen mas elevado de la velocidad del motor se utiliza una portadora de 15 impulsos por ciclo; mientras que a bajas velocidades del motor, la frecuencia de conmutación se obtiene de múltiplos más elevados de la frecuencia de salida del inversor, teniendo como máximo una portadora de 128 impulsos por ciclo; esto con el propósito de mejorar el contenido armónico.
I-
O . . . . . . . . . .....
Fig. IV.l.- Señales de control generadas por el circuito integrado HEF4752 corrcspondicntes a una frecuencia de salida de 60 Hz.
42

CAPITULO IV.- ETAPA DE CONTROL.
En la figura.IV-1 se muestran tres seíiales de control generadas por el circuito HEF4752, en las cuales puede apreciarse un desfasamiento de 120". Este circuito varía proporcionalmente la tensión de acuerdo a la frecuencia de salida, con lo que es posible obtener una curva tensión-frecuencia constante. Además de esta característica permite una variación independiente de la tensión y la frecuencia de salida, con lo que es posible generar una curva tensión-frecuencia programable, como es'el caso de la curva V/F constante compensada en bajas frecuencias obtenida en este trabajo.
En la figura IV.2 se muestra el esquema del generador PWM trifásico. Se pueden apreciar las entradas de control de tensión (V) y frecuencia (F), además de las necesarias para fijar la frecuencia máxima de conmutación (fsw), el tiempo muerto (t,,,), y sentido de giro, así como la señal de inhabilitación de las salidas, la
.. cual se utiliza para encender y apagar el sistema, además de aplicar un "resef'en MSO que se presenten fallas en la etapa de potencia. Todas estas entradas se aplican en forma de pulsos de reloj. Para las señales de frecuencia de conmutación y de tiempo muerto se utilizan relojes a frecuencia fija, mientras que para las entradas de tensión y frecuencia se utilizan osciladores controlados por tensi6n (VCO).
ARRANQUElPARO
GENERADOR
SEÑALES DE CONTROL
Fig. IV.2.- Esquema del generador de PWM trifásia, HEF4752.
Un punto importante, es que se implementó una lógica de protección con el propósito de que la entrada que comanda el sentido de giro solo sea aceptada cuando el generador PWM se encuentra inhabilitado, debido a los problemas que generaría el cambio de giro del motor cuando esta operando.
43

CAPlTULO W.- ETAPA DE CONTROL
IV.2.2.- GENERACIÓN DE LA CURVA VIF COMPENSADA EN BAJAS FRECUENCIAS.
De acuerdo a las ecuaciones que se presentan en el Capitulo I y los parámetros obtenidos en el apéndice A, se obtiene la curva tensión-frecuencia compensada en bajas frecuencias, la cual se muestra en la figura IV.3. Es importante anotar que esta curva se ajustó de acuerdo a la respuesta que presenta el motor en la práctica.
V
200
150
1 O0
50
O O 10 20 30 40 50 Hz
Fig. IV.3.- Curva tensión-frecuencia compensada.
En base a la'curva de la figura IV.3 se determinan las señales necesarias en las entradas de tensión y frecuencia del generador PWM. Esta información es almacenada en dos memorias del tipo UVEPROM, las cuales se direccionan de acuerdo a la velocidad de referencia fijada.
Un punto importante a considerar es que las señales generadas por el circuito integrado no mantienen una relación VIF completamente lineal en todo el rango de frecuencias, por lo que es necesario variar la señal de tensión al tiempo .que se varía la señal de frecuencia para mantener una relación lineal, además de la variación necesaria para realizar la compensación en bajas frecuencias. En la figura iV-4 se muestra el diagrama a b1oque.s ' del circuito generador PWM; manteniendo una .relación VIF compensada en baja frecuencias.

CAPITULO N.- ETAPA DE CONTROL.
Referenda
SEÜALES DE CONTROL
Fig. IV-4.- Diagrama a bloques del circuito generador PWM manteniendo una relación VE compensada en bajas frecuencias.
IV.3.- PROTECCIONES AL SISTEMA.
Es necesario proteger al accionador de fallas que se presenten, principalmente por sobrecorriente en la salida. El módulo inteligente inhabilita internamente los dispositivos de potencia en caso de presentarse una condición de sobretemperatura, baja tensión y sobrecorriente; además de generar una señal, que se utiliza para inhabilitar las salidas del generador PWM, con lo que se obtiene una redundancia en la protección. Si la condición de falla desaparece, el módulo habilita nuevamente los dispositivos, lo que podría ocasionar un daño en los mismos si la causa que origina la falla continúa. Por esta razón las señales del generador permanecen inhabilitadas hasta que se comande el restablecimiento manual del sistema. El esquema general de la protección se muestra en la figura IV-5.
r - I I ARRANQUEPARO
G E N F E O R Fi POTENCIA
PROTECCION DE 1-w Fig. IV.5.- Protección contra sobrecomenle del accionador.
\
45
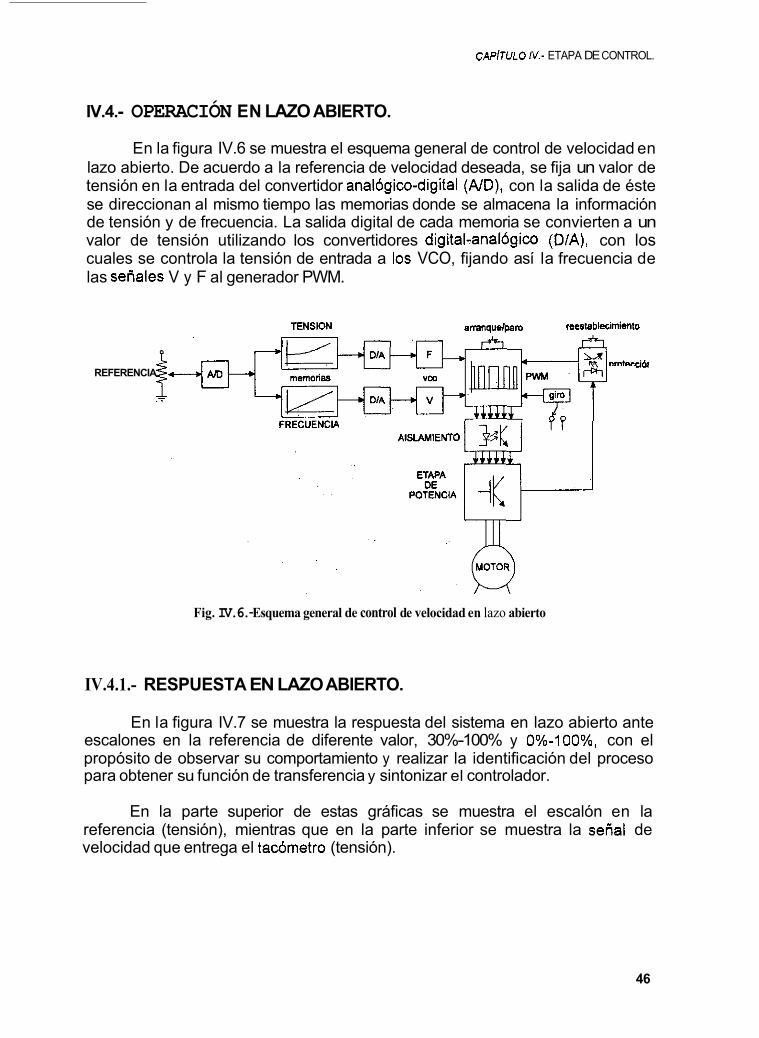
CAP~TULO IV: ETAPA DE CONTROL.
IV.4.- OPERACIÓN EN LAZO ABIERTO.
En la figura IV.6 se muestra el esquema general de control de velocidad en lazo abierto. De acuerdo a la referencia de velocidad deseada, se fija un valor de tensión en la entrada del convertidor analógico-digital (AID), con la salida de éste se direccionan al mismo tiempo las memorias donde se almacena la información de tensión y de frecuencia. La salida digital de cada memoria se convierten a un valor de tensión utilizando los convertidores digital-analógico ([>/A), con los cuales se controla la tensión de entrada a los VCO, fijando así la frecuencia de las setiales V y F al generador PWM.
ENSION reesIablf%imiento
FRECUENClA
REFERENCIA
Fig. IV.6.- Esquema general de control de velocidad en lazo abierto
IV.4.1.- RESPUESTA EN LAZO ABIERTO.
En la figura IV.7 se muestra la respuesta del sistema en lazo abierto ante escalones en la referencia de diferente valor, 30%-100% y 0%-loo%, con el propósito de observar su comportamiento y realizar la identificación del proceso para obtener su función de transferencia y sintonizar el controlador.
En la parte superior de estas gráficas se muestra el escalón en la referencia (tensión), mientras que en la parte inferior se muestra la seíial de velocidad que entrega el tadmetro (tensión).
46
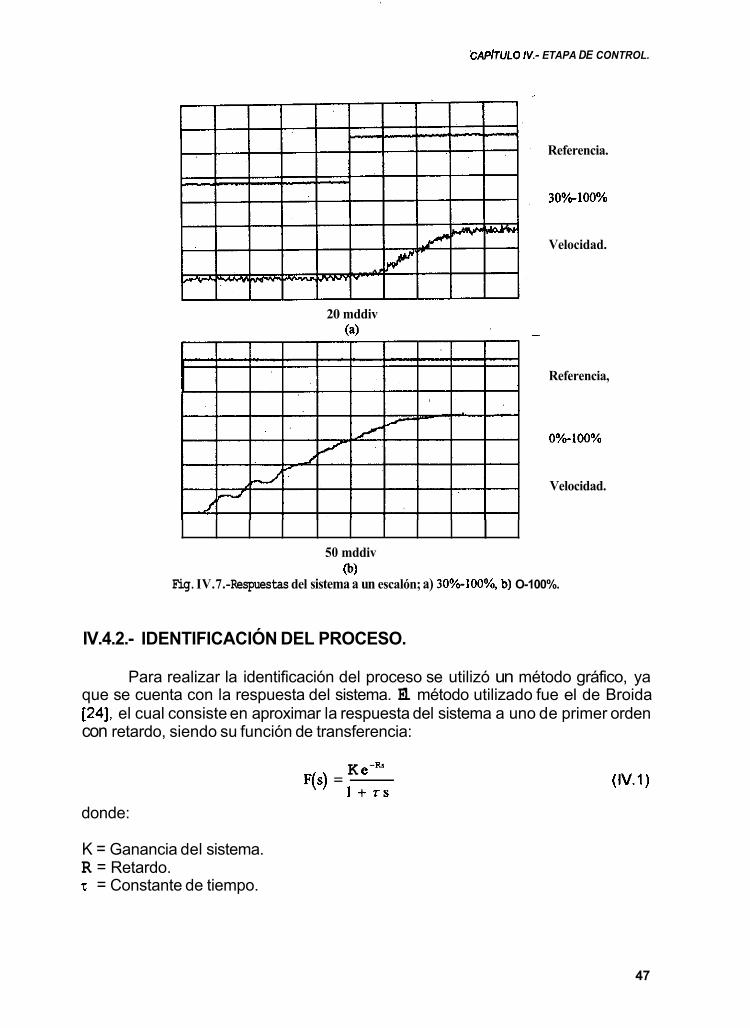
CAP/TLlLO IV: ETAPA DE CONTROL.
20 mddiv
I
Referencia.
30%100%
Velocidad.
Referencia,
OYG-IOO%
Velocidad.
50 mddiv (b)
Fig. IV.7.- Respuestas del sistema a un escalón; a) 30%-loo%, b) O-100%.
IV.4.2.- IDENTIFICACIÓN DEL PROCESO.
Para realizar la identificación del proceso se utilizó un método gráfico, ya que se cuenta con la respuesta del sistema. El método utilizado fue el de Broida [24], el cual consiste en aproximar la respuesta del sistema a uno de primer orden con retardo, siendo su función de transferencia:
K e-& F( S) = -
1 -b 5 s
donde:
(IV.1)
K = Ganancia del sistema. R = Retardo. t = Constante de tiempo.
47
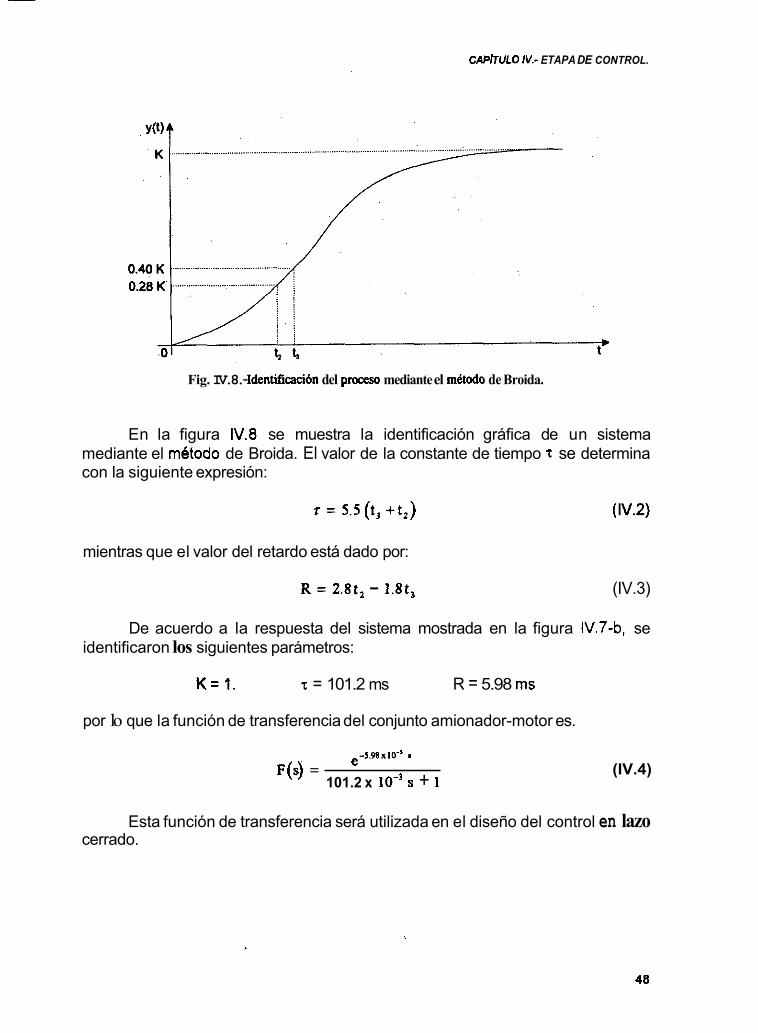
CAPhULO N.- ETAPA DE CONTROL.
Fig. IV.8.- Identificación del pmceso mediante el m&todo de Broida.
En la figura IV.8 se muestra la identificación gráfica de un sistema mediante el metodo de Broida. El valor de la constante de tiempo 5 se determina con la siguiente expresión:
r = S S ( t , + t , ) (IV.2)
mientras que el valor del retardo está dado por:
R = 2.8t2 - 18 t , (IV.3)
De acuerdo a la respuesta del sistema mostrada en la figura IV.7-b, se identificaron los siguientes parámetros:
K = 1. T: = 101.2 ms R = 5.98 ms
por lo que la función de transferencia del conjunto amionador-motor es.
e-5.5axIo-’ 8
101.2 x io-’ s + 1 F(s) = (IV.4)
Esta función de transferencia será utilizada en el diseño del control en lazo cerrado.
40

CAPITULO IV: ETAPA DE CONTROL
IV.5.- CONTROL DE VELOCIDAD EN LAZO CERRADO.
La parte principal de un sistema electrónico operando en lazo cerrado, es el controlador, el cual se encarga de recibir la información de la señal de referencia y de la realimentación, proporcionando como salida la señal que se utiliza para corregir el error existente. El propósito del controlador es mantener la variable del proceso en un valor igual a la referencia fijada "set-pornt': Bajo circunstancias ideales, la variable controlada nunca deberia alejarse de la referencia, sin embargo ante la presencia de una perturbación la salida comienza a alejarse de la referencia. El controlador debe ser capaz de mantener la salida en el valor prefijado haciendo que el error tienda a cero, además de que esta respuesta debe ser rápida; por lo tanto la calidad de un controlador depende de la rapidez de respuesta y del error de estado estable que presenta [25]. A continuación se comentan de manera breve los tipos principales de controladores así como sus características.
A) CONTROL ENCENDIDO-APAGADO.
En un sistema de este tipo, el elemento accionador tiene solamente dos posiciones fijas, que en muchos casos son simplemente conectado y desconectado. Sea la señal de salida del controlador m(t) y la señal de error actuante e(!). En un controlador encendido-apagado, la señal m(t) permanece en un valor. máximo 6 mínimo, dependiendo si la señal de error es positiva o negativa:
m(t) = Mi para e(t) > O
m(t) = M2 para e(t) c O
(IV. 5)
(IV.6)
En la práctica este tipo de controlador 'debe poseer una banda de histéresis, es decir, el nivel que lleva a que la salida sea encendida debe ser diferente del nivel que lleva a que la salida se apague, ya que de lo contrario el sistema podría entrar en oscilación. Este tipo de control es utilizado principalmente por su simplicidad y bajo costo [26].
B) CONTROL PROPORCIONAL.
En muchos casos el error y la banda de histéresis que presenta el controlador encendido-apagado, no puede ser permitido. Un confrolador proporcional permite un mejor control de la variable del proceso, ya que la salida puede tomar valores intermedios entre completamente encendido o completamente apagado. Como su nombre Io indica la salida cambia proporcionalmente al valor del error. La relación entre la salida del controlador m(t) y la señal de error actuante es:
49

o en magnitudes de transformada de Laplace:
CAPlTULO fV.- ETAPA DE CONTROL.
(IV.7)
(IV.8)
C) CONTROL INTEGRAL.
El controlador proporcional presenta un cierto error de estado estable, este error puede reducirse a cero utilizando un controlador integral. Este tipo de control forza la señal de salida de tal modo que el error presente sea cero. La relación entre la salida m(t) y el error e(!) está dado por:
(IV. 9)
donde rl se denomina constante de tiempo integral; su funci6n de transferencia está definida por:
(IV. 1 O)
D) CONTROL PROPORCIONAL-DERIVATIVO.
La acción de control proporcional y derivativa queda definida por la siguiente ecuación:
m(t)=Kp e(t)+r, - d e(t) dt
y su función de transferencia está dada por:
(IV.11)
(IV. 12)
donde to es el tiempo derivativo. La acción de control derivativa consiste en que el valor de la salida sea proporcional a la velocidad de variación de la señal de error. El tiempo derivativo es. el intervalo de tiempo en el que la acción de control derivativa se adelanta al efecto de la acción proporcional, siendo ésta su principal ventaja, sin embargo presenta los inconvenientes de que amplifica ¡as Seíiales de ruido y puede producir efectos de saturación. El controlador derivativo no se utiliza en forma aislada ya que sólo es efectivo.durante periodos transitorios.
50

CAPfTIJLO IV: ETAPA DE CONTROL.
___*
E) CONTROL PROPORCIONAL-INTEGRAL.
Los controladores integrales casi nunca se utilizan en forma aislada, generalmente se usan en forma conjunta con otro tipo de controlador, la razón es que aunque son capaces de llevar el error a cero, presentan una respuesta muy pobre ante transitorios. Esto es, la salida responde muy lentamente ante cambios rápidos en la señal de error.
Combinando los principios de los controladores proporcional e integral en el mismo controlador se pueden obtener las ventajas de los dos El controlador proporcional reacciona rápidamente pero no es capaz de llevar el error de estado estable a cero, mientras que el controlador integral reacciona lentamente pero después de cierto tiempo puede eliminar el error. En la figura iV.9 se muestran las combinaciones de estos dos controladores.
1 T I S -
I l
E(s) __*
__*
Para el algoritmo no interactuante su función está dada por:
K,
(IV. 13)
51
.-
CAPITULO N.- ETAPA DE CONTROL.
mientras que para el algoritmo paralelo' su función de transferencia está dada por:
! (IV, 14)
IV.5.1.- SINTONIZACIÓN DEL CONTROLADOR.
El controlador implementado fue del tipo proporcional-integral, en vista de proporcionar una rápida respuesta ante perturbaciones en la carga y. llevar el error de estado estable a cero; la implementación se realizó en forma analógica en base al algoritmo del tipo paralelo.
Un método clásico para la sintonización de controladores es el desarrollado por Ziegler y Nichols, el cual es ampliamente utilizado [27]. Se basa en la respuesta a lazo abierto del sistema ante un escalón en la referencia, de la cual se obtienen algunos parámetros, tal como se muestra en la figura IV.10. El primer paso consiste en determinar el punto donde la respuesta tiene una pendiente máxima y trazar su tangente. La intersección de esta recta con el eje x proporciona el retardo del sistema L; se denomina 0 al ángulo que forma la recta tangente con el eje x, mientras que el valor de estado estable que alcanza el sistema es igual a y(m). El valor de Ri está dado por:
(IV. 15)
Otra parte del método consiste en determinar la ganancia ultima y el periodo último del proceso. La ganancia Última (KJ se define como aquella que lleva al proceso a entrar en oscilación con amplitud constante, mientras que el periodo último (Py) es el periodo de estas oscilaciones.
Los valores de la ganancia Última y el periodo Último están dados por:
Po =4L
(IV. 16)
(IV. 17)
52

CAPITULO IV.- ETAPA DE CONTROL.
.......................... ~ ....... ~~ ....................................... ~ ........ ~ ........,. ~ .................................... ~~~ ....... ~~ ....
Proporcional Proporcional-integral
Tabla IV. 1 .- Parámetros del controlador PI.
Kp 71 Kd2; 1RlL
0.45 K.; 0.9RlL PJ1.2; L/0.3
Es importante anotar que los valores de la tabla IV.l están referidos al algoritmo no interactuante, por lo que los valores encontrados se consideran como KpI y 7,'. Para encontrar los valores correspondientes al algoritmo paralelo, se utilizan las siguientes expresiones:
K,=K; (IV.18)
(IV. 19)
En la figura IV. l l se muestra el controlador implementado. De acuerdo a la respuesta en lazo abierto de las figuras IV.6 a,b correspondientes a las respuestas del sistema a escalones en la referencia con valor de 30%-I00 % y de 0%-I OO%, aplicando el método de Ziegler-Nichols. se obtuvieron los siguientes parámetros:
53

-- CAPlTULO IV: ETAPA O€ CONTROL.
para 30%-100 %:
Kp = 0.825; 7, = 33.7 ms
para 0%-1 O0 %:
Kp= 0.713; rl = 53.84 ms
Partiendo de estos valores se realiza la sintonización fina de los parámetros de acuerdo a la respuesta que presenta el sistema en la práctica; los valores que se aplicaron al controlador son:
Kp= 1; rl = 39.6 ms
Fig. IV. 11.- Controlador proporcional-integral implementado.
En la figura IV.12 se muestra la función de transferencia del conjunto accionador-motor, en base a los resultados obtenidos de la identificación del proceso mediante el método de Broida, y la sintonización del controlador mediante el método de Ziegler-Nichols. - -
e-5pI"Io-'<
101.2x10"s t I Referencia I & It 39.6 x 10"s
Retroalimentación f CONTROLADOR PROCESO
Fig. IV. 12.- Diagrama a bloques del conjunto controlador-accionadar-motor.
54

CAP/TULO IV.- ETAPA DE CONTROL.
IV.5.2.- ANÁLISIS DE ESTABILIDAD.
Es importante realizar un análisis al sistema para asegurar que con los parámetros del controlador, se mantiene la.estabilidad. Una forma de realizarlo es a través del criterio de Routh.[28].
.El procedimiento es el siguiente:
1.- Obtener la función de transferencia en lazo cerrado del sistema. Escribir el polinomio del denominador en la forma siguiente:
a, s" +a, s".' + .. . , .+an-, S+ am = O (IV.20)
donde los coeficientes son cantidades reales. Se supone que a, f O.
coeficientes de la ecuación característica sean positivos 2.- La condición necesaria pero no suficiente de estabilidad es que todos los
3.- Si todos los coeficientes son positivos se agrupan en filas y columnas de acuerdo al siguiente esquema:
S" a0 a2 a4 a6
S".' al a3 a5 a7 .. bi b2 b3 b4
s".2
SU4 di d2 d3 d4 .. c1 c2 c3 c4 ..
<. ..
<. .. S2 e1 e2
SI fl
So gl
los coeficientes b,, bz, b3, etc. son calculados del modo siguiente:
(IV.21)
(IV.22)
la evaluación de b continúa hasta que las restantes sean todas cero Se sigue el mismo esquema multiplicando en forma cruzada los coeficientes de las dos filas previas para evaluar c, d, e, etc
55

CAPITULO N.-’ ETAPA DE CONTROL.
Este proceso continúa hasta haber completado la fila enesima. El conjunto completo de los coeficientes es triangular. El criterio de Routh establece que la cantidad de raíces de la ecuación IV.15 con partes reales positivas, es igual al número de cambios de signo de los coeficientes de la primera columna del conjunto. La condición necesaria y suficiente para asegurar la estabilidad es que todos los coeficientes de la primera columna sean positivos.
En el caso del conjunto controlador-accionador-motor, se tiene que la función de transferencia en lazo cerrado es igual a:
(IV 731
la ecuación característica está dada por:
(r ,r-Kpr1R)s2 + ( r , + K p r l - R ) s + l = O (IV.24)’
ordenando de acuerdo al criterio de Routh se obtiene:
S2 ( T I T - K ~ T I R ) 1 Sl (TI + & T I - R) O S 1
para asegurar la estabilidad se debe mantener:
( ~ i T - Kp TI R) > O
(TI + &, TI - R) > O además de:
despejando Kp se obtiene que:
O Kpc 16.92
con lo que se asegura que el sistema se mantendrá estable con la ganancia proporcional unitaria que se implementó al controlador.
IV.5.3.- ESQUEMA GENERAL DEL ACCIONADOR.
En la figura IV.13 se muestra el lazo de control analógico implementado, de acuerdo al diseno realizado. Un punto muy importante del esquema de control de velocidad, es que se realizó en base a que mantuviera un error de estado estable igual o muy cercano a cero, además de presentar una buena respuesta ante transitorios.

. -
CAPfTULO N- ETAPA DE CONTROL.
Otro aspecto importante en el diseíio e implementación del controlador es la regulación del deslizamiento para limitarlo a un valor mínimo, y trabajar con las ventajas mencionadas en el capítulo I, tales como una menor corriente consumida, y un factor de potencia alto, teniendo como consecuencia que el motor opere con una mayor eficiencia. En el capítulo citado se concluyó que el valor al cual se limite el deslizamiento debe ser menor al que presenta el motor cuando desarrolla el par máximo. De acuerdo al apéndice A, el motor utilizado presenta un deslizamiento de par máximo igual a 15%, por lo que el valor del mismo se limitó al 10%.
canmiador PI
b a r
Fig. IV.13.- Lazo de control analógico
En la figura IV.14 se muestra el diagrama a bloques del accionador desarrollado, mostrando el esquema de control de velocidad en lazo cerrado manteniendo una regulación del deslizamiento.
PI LIMITADOR OEL
NTRoLADoR DESLIZAMIENTO
TENSION
FRECUENCIA
Fig. 1V.14.- Esquema general de control de velocidad con regulación del deslizamiento.
57
CAPíTULO V
PRUEBAS Y RESULTADOS
--_-
CAPlTULO V.- PRUEBAS Y RESULTADOS.
V.l.- INTRODUCC16N.
En el presente capítulo se exponen las pruebas realizadas al sistema, y los resultados de las mismas, tales como: formas de onda de corriente, de tensión, contenido armónico a distintas velocidades de operación del motor, además de la respuesta del lazo de control ante un escalón en la referencia y los resultados de regulación de velocidad.
Para la realización de las pruebas se utilizó et siguiente equipo, perteneciente al laboratorio de electrónica de potencia de CENIDET:
Punta de corriente.
Aislador de fibra Óptica para mediciones de tensión.
Osciloscopio digital con salida a impresora
Tacómetro.
Medidor de velocidad digital.
Banco de pruebas de electrónica de potencia
Motor trifásico.
Motor de CD
La figura V.l muestra el esquema motor-carga implementado, en el que puede apreciarse una máquina de CD acoplada directamente a la flecha del motor trifásico. Se utiliza la máquina de CD wmo generador; la forma de aplicar la carga al motor trifásico es la siguiente: se aplica una tensión de excitación al devanado de campo, mientras que se conecta una resistencia a las terminales de. armadura, la cual representa la carga. El escalón de carga se aplica al momento de conectar la resistencia, ya que, al generador, se le está demandado corriente, por lo tanto intentará frenarse, oponiéndose al sentido de giro del motor trifásico.
El valor de la tensión de excitación aplicada es de 60 V, mientras que la resistencia de 70 R, los cuales se ajustaron de tal forma que el motor trabaje con la mayor carga posible y teniendo.cuidado de no sobrepasar la corriente permitida en el devanado de armadura.'
También se muestra el tacómetro acoplado a la flecha de la máquina de CD, cuya señal se acopla al medidor digital de velocidad al mismo tiempo que se realimenta al circuito de control.
59
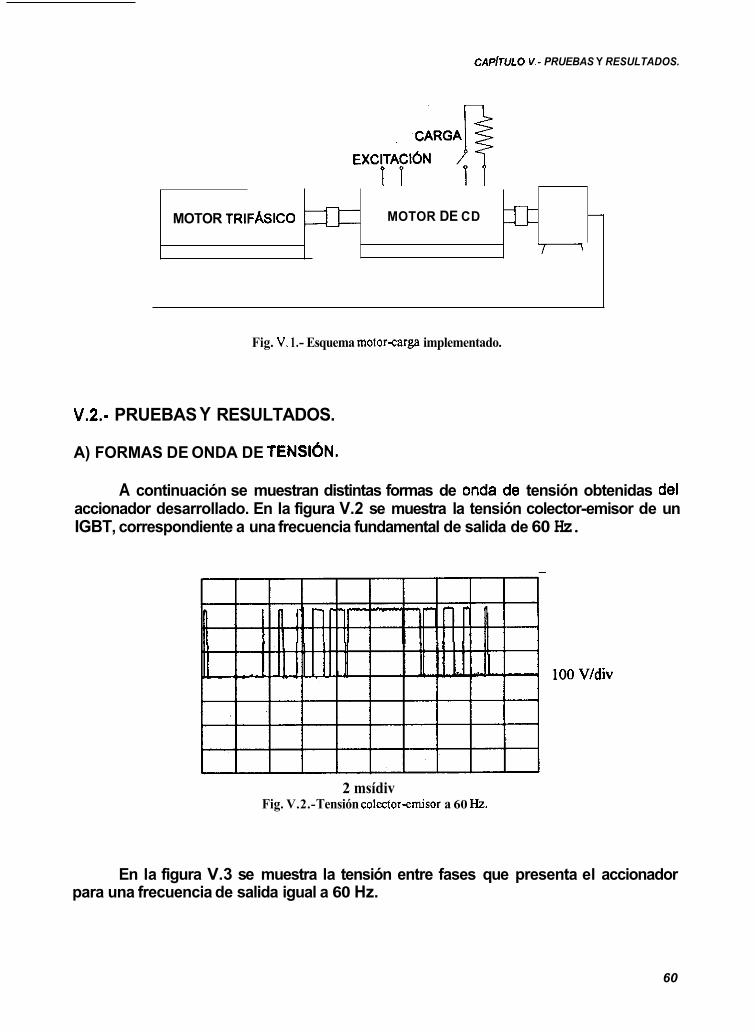
CAP/TULO V.- PRUEBAS Y RESULTADOS.
MOTOR TRIFASICO 7 MOTOR DE CD -
Fig. V. 1.- Esquema motor-carga implementado.
V I . - PRUEBAS Y RESULTADOS.
A) FORMAS DE ONDA DE TENSdN.
A continuación se muestran distintas formas de ow, L, tensión obtenidas -JI accionador desarrollado. En la figura V.2 se muestra la tensión colector-emisor de un IGBT, correspondiente a una frecuencia fundamental de salida de 60 Hz.
1 O0 V/div
2 msídiv Fig. V.2.- Tensión wlector-emisor a 60 Hz.
En la figura V.3 se muestra la tensión entre fases que presenta el accionador para una frecuencia de salida igual a 60 Hz.
60

CAPITULO V: PRUEBAS Y RESULTADOS.
100 V/dk
2 ms/div Fig. V.3.- Tensión entre fases a 60 Hz.
En las figuras V.2 y V.3 puede apreciarse que no existen sobretensiones en las conmutaciones de los dispositivos de potencia. Con el objeto de mostrar a detalle estas conmutaciones se muestran las figuras V.4 y V.5, donde se aprecia que se realizan en un tiempo muy corto.
100 V/div
La tensión colector-emisor durante la conmutación de apagado se muestra en la figura V.4, donde puede apreciarse que no existe sobretensión y se realiza en un tiempo aproximado de 2 ps,
En la figura V.5 se muestra la forma de onda de tensión colector-emisor durante el encendido; en la cual puede apreciarse un pequeño sobreimpulso, además de un tiempo de encendido de 1 ps aproximadamente.
61

CAPlTULO V,- PRUEBAS Y RESULTADOS.
I I I I I I I I I 5 ws/div
Fig. V.5.- Tensión colector-emisor durante el encendido.
100 V/div
Como ya se mencionó en el capítulo 111, resulta necesario intercalar un tiempo muerto entre el apagado de un dispositivo y el encendido del otro de la misma rama. En la figura V.6 se muestra el tiempo muerto intercalado el cual tiene un valor de 12 p.
En la figura V.7 se muestran las formas de onda de corriente y tensión correspondientes a una velocidad de operación de 1500 rpm operando con carga, la cual corresponde a una frecuencia de salida igual a 52.5 Hz;. en esta figura puede apreciarse que la corriente y tensión del motor se encuentran prácticamente en fase.
62

CAPlTULO V.- PRUEBAS Y RESULTADOS
I I 1
2.0 Aídiv
100 V/div
I I I I I I I I I I
2 mddiv Fig. V.7.- Tensión y comente del motor a I500 rpm, con carga (52.5 Hz).
1 .O Aidiv
1 O0 V/div
I I I I I I I I I I
5 mddiv Fig. V.8.- Tensión y comente del motor a 1200 rpm sin carga (40 Hz)
Fig. V
63
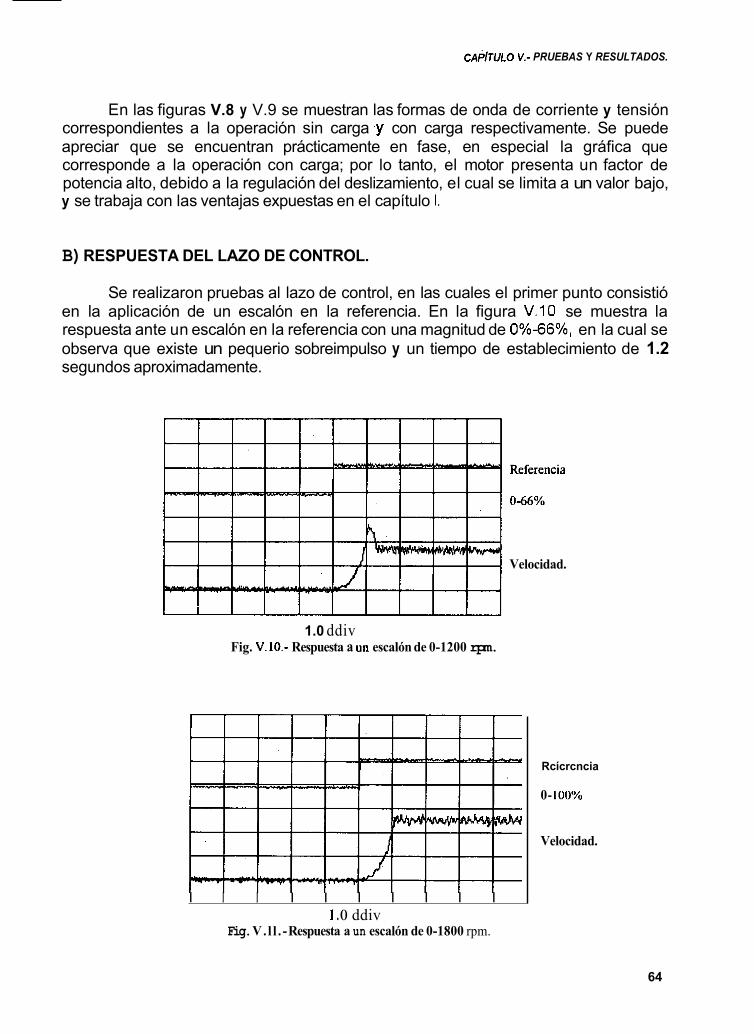
CAP/TULO V.- PRUEBAS Y RESULTADOS.
En las figuras V.8 y V.9 se muestran las formas de onda de corriente y tensión correspondientes a la operación sin carga .y con carga respectivamente. Se puede apreciar que se encuentran prácticamente en fase, en especial la gráfica que corresponde a la operación con carga; por lo tanto, el motor presenta un factor de potencia alto, debido a la regulación del deslizamiento, el cual se limita a un valor bajo, y se trabaja con las ventajas expuestas en el capítulo I.
B) RESPUESTA DEL LAZO DE CONTROL.
Se realizaron pruebas al lazo de control, en las cuales el primer punto consistió en la aplicación de un escalón en la referencia. En la figura V.10 se muestra la respuesta ante un escalón en la referencia con una magnitud de O%-66%, en la cual se observa que existe un pequerio sobreimpulso y un tiempo de establecimiento de 1.2 segundos aproximadamente.
Reíerencia
066%
Velocidad.
1.0 ddiv Fig. V.10.- Respuesta a un escalón de 0-1200 rpm.
I I I I I I I I I I
Rcícrcncia
0- loo%
Velocidad.
1 .O ddiv Fig. V.l l . - Respuesta a un escalón de 0-1800 rpm.
64

CAPlTULO V - PRUEBAS Y RESULTADOS
VELOCIDAD SIN CARGA (rpm) 450 600 900
En la figura V.11 puede apreciarse la respuesta ante un escalón en la referencia de 0%-100%. En esta gráfica se observa que no existe sobreimpulso en la respuesta del sistema, además de que tiene un tiempo aproximado de establecimiento de 1 segundo.
~ VELOCIDAD A PLENA CARGA (rpm) 450 600 9nn
En la tabla V. l se muestra la regulación de velocidad en estado estable que mantiene el sistema en un amplio rango de velocidades.
Tabla V.l.- Regulación de velocidad en estado estable
1500 1500 1800
En la figura V.12 se muestra la corriente de arranque que presenta el motor con el accionador operando a lazo cerrado, donde se aprecia que su valor pico máximo es de 4 A aproximadamente, siendo este valor una cuarta parte de la corriente de arranque que presenta, si se alimenta directamente de la linea trifásica, esto es debido a que el motor es llevado a la velocidad nominal de una forma menos abrupta, mediante el control implementado.
1800
2.0 Ndiv
50 mddiv Fig V 12 -Comente de arranque
65
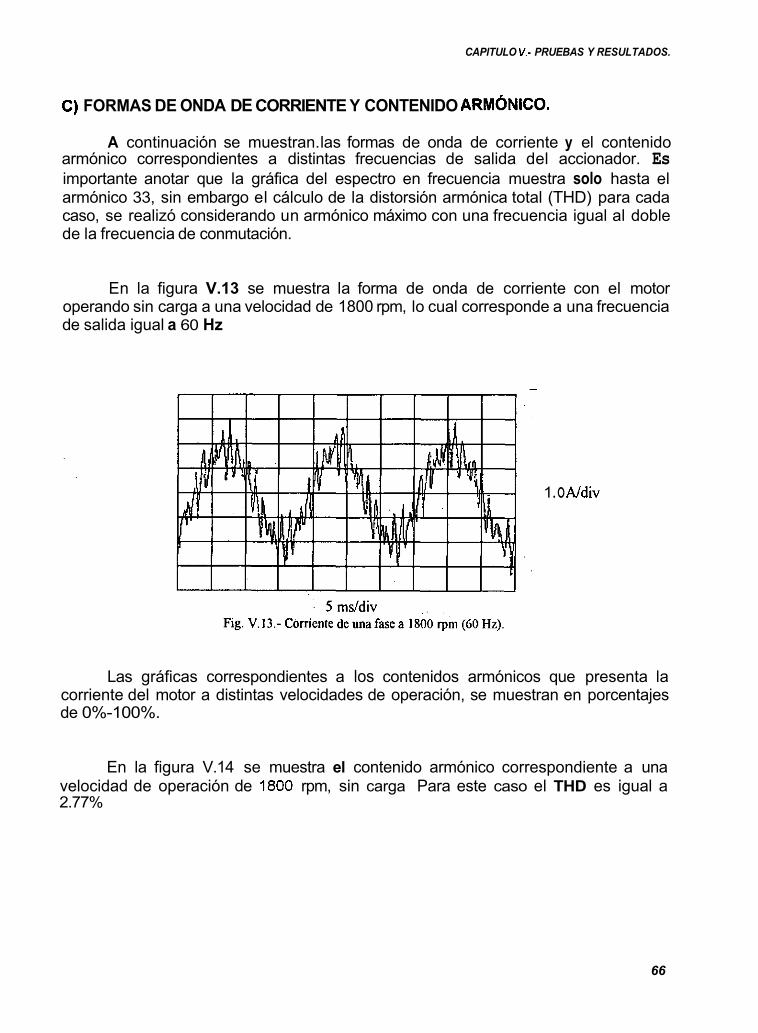
CAPlTULO V,- PRUEBAS Y RESULTADOS.
c ) FORMAS DE ONDA DE CORRIENTE Y CONTENIDO ARM~NICO.
A continuación se muestran. las formas de onda de corriente y el contenido armónico correspondientes a distintas frecuencias de salida del accionador. Es importante anotar que la gráfica del espectro en frecuencia muestra solo hasta el armónico 33, sin embargo el cálculo de la distorsión armónica total (THD) para cada caso, se realizó considerando un armónico máximo con una frecuencia igual al doble de la frecuencia de conmutación.
En la figura V.13 se muestra la forma de onda de corriente con el motor operando sin carga a una velocidad de 1800 rpm, lo cual corresponde a una frecuencia de salida igual a 60 Hz
1 .O Ndiv
Las gráficas correspondientes a los contenidos armónicos que presenta la corriente del motor a distintas velocidades de operación, se muestran en porcentajes de 0%-100%.
En la figura V.14 se muestra el contenido armónico correspondiente a una velocidad de operación de 1800 rpm, sin carga Para este caso el THD es igual a 2.77%
66

CAP/TULO V.- PRUEBAS Y RESULTADOS.
Fig. V. 14.- Contenido armónico a 1800 rpm, sin carga (60 Hz). THD = 2.11 %
En la figura V.15 se muestra la forma de onda de corriente que presenta el motor, correspondiente a una velocidad de operación de 1500 rpm, sin carga, con una frecuencia de salida igual a 50 Hz. mientras que en la figura V.16 se muestra el contenido armónico correspondiente a este caso. presentando un THD igual a 3.04 %.
1 .o A/div
5 msldiv Fig. V. 15.- Comente de una fase a 1500 rpm (50 Hz)
67

CAPlTULO V.- PRUEBAS Y RESULTADOS.
o 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33
Fig. V.16.- Contenida armónico a 1500 rpm, sin carga (50 Hz). THD = 3.04 %
La figura V.17 muestra la forma de onda de corriente que presenta el motor operando con carga a una velocidad de 1500 rpm, con lo que la frecuencia de salida del accionador es igual a 52.5 Hz.
Fig. V.17.-
I .O Ndiv
I I I I I I I I I I I 5 msídiv
Comente de una fase can el matar operando can carga a I500 rpm (52.5 Hz).
En la figura V.18 se muestra el contenido armónico correspondiente al caso anterior, el THD presente es igual a 0.28 %.
68

_____-
CAPITULO V.- PRUEBAS Y RESULTADOS.
I O0
80
60
40
20
O 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33
Fig. V.18.- Contenido armónico a 1500 rpm, wn carga (52.5 E). THD = 0.28 %
En la figura V.19 se puede observar la forma de onda de corriente que presenta el motor operando sin carga a una velocidad de 1200 rpm, lo que corresponde a una frecuencia de salida igual a 40 Hz.
1.0 Ndiv
5 mddiv Fig. V. 19.- Comentc de una fase a IZO0 rpm, sin carga (40 Hz)
69
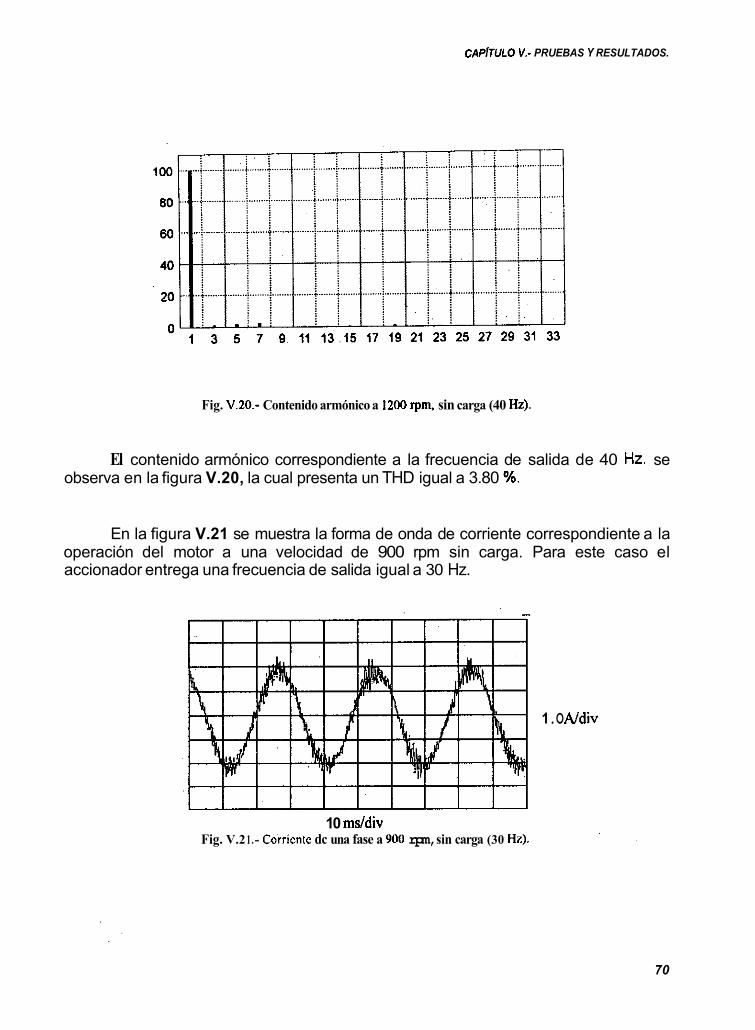
CAP/TULO V.- PRUEBAS Y RESULTADOS.
Fig. V.20.- Contenido armónico a I200 rpm, sin carga (40 Hz).
El contenido armónico correspondiente a la frecuencia de salida de 40 Hz. se observa en la figura V.20, la cual presenta un THD igual a 3.80 Om.
En la figura V.21 se muestra la forma de onda de corriente correspondiente a la operación del motor a una velocidad de 900 rpm sin carga. Para este caso el accionador entrega una frecuencia de salida igual a 30 Hz.
1 .O Ndiv
10 mddiv Fig. V.2 1 .- Comenic dc una fase a 900 rpm, sin carga (30 Hz).
70
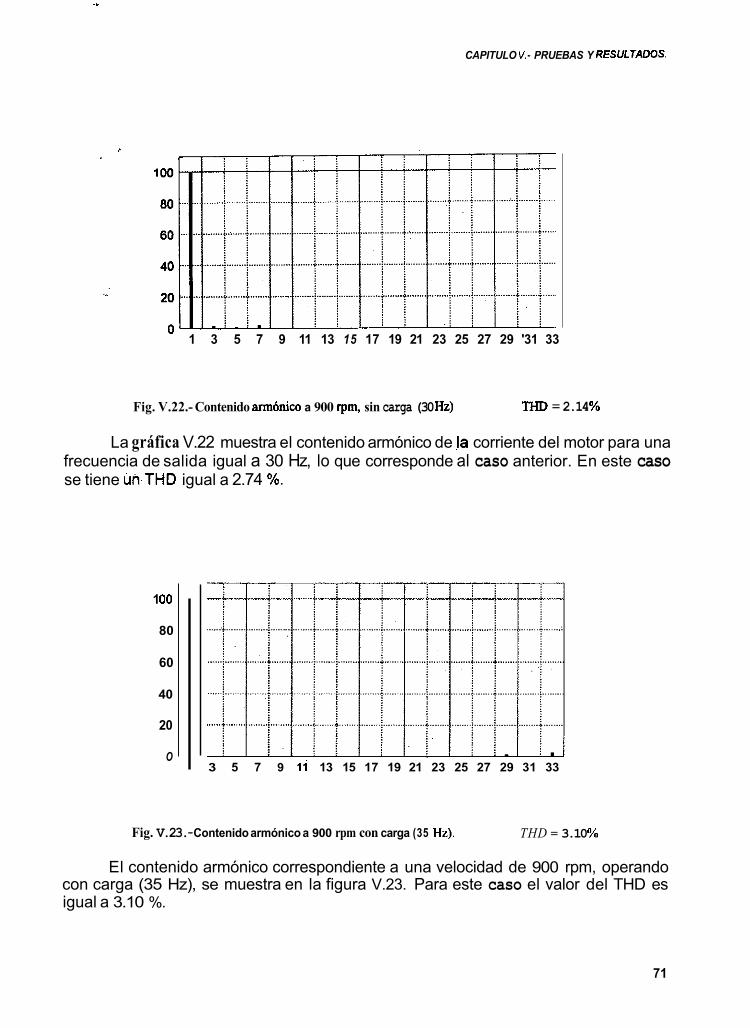
-. CAPITULO V.- PRUEBAS Y RESULTAM)S.
" 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 '31 33
Fig. V.22.- Contenido armONco a 900 rpm, sin carga (30 Hz) THü = 2.14 %
La gráfica V.22 muestra el contenido armónico de !a corriente del motor para una frecuencia de salida igual a 30 Hz, lo que corresponde al caso anterior. En este caso se tiene un.THD igual a 2.74 %.
1 O0
80
60
40
20
O 3 5 7 9 I 1 13 15 17 19 21 23 25 27 29 31 33
Fig. V.23.- Contenido armónico a 900 rpm con carga (35 Hz). THD = 3.10 %
El contenido armónico correspondiente a una velocidad de 900 rpm, operando con carga (35 Hz), se muestra en la figura V.23. Para este caso el valor del THD es igual a 3.10 %.
71

CAPITULO V,. PRUEBAS Y RESULTADOS.
La forma de onda de corriente del motor correspondiente a la operación sin carga a una velocidad igual a 450 rpm, lo que corresponde a'una frecuencia de salida de 15 Hz se muestra en las figura V.24.
20 mddiv Fig. V 24.- Comente de una fase a 450 rpm (15 Hz)
0.5 Aídiv
Fig. V.25.- Contenido armónico a 450 rpm (15 E). THD = 5.16 %
En la figura V.25 se muestra el contenido armónico correspondiente a una velocidad de operación de 450 rpm sin carga (15 Hz), en la cual se tiene un THD igual a 5.16 %.
72

CAPITULO V: PRUEBAS Y RESULTADOS.
0.5 Ndiv
20 msidiv Fig. V.26.- Comente de una fase con el motor operando con carga a 450 rpm (17.5 Hz).
La figura V.26 muestra la forma de onda de corriente correspondiente a una velocidad de operación de 450 rpm, con carga para lo cual se tiene una frecuencia de salida de 20 Hz.
En la tabla V.2 se muestran las distorsiones armónicas para los casos presentados.
Tabla V.2.- Distorsiones armónicas totales correspondientes a los casos mostrados.
73

CAP/TULO V: PRUEBAS Y RESULTADOS.
D) TENSIÓN Y CORRIENTE DE GD.
En la figura V.27 se muestra la forma de onda de corriente que entrega el rectificador, mientras que en la figura V.28 se muestra la forma de onda correspondiente a la tensión de entrada al inversor, donde puede apreciarse un valor de pico a pico de 2 V aproximadamente.
1 .O Aídiv
20 mddiv .Fig. V.27.- Comente en el bus de CD
5 V/div
10 mddiv Fig V 28 -Tensión de nzo en el bus de CD
74

CAPíTULO VI
CONCLUSIONES

CAPlTULO VI.- CONCLUSIONES.
VI.l.- CONCLUSIONES.
El accionador desarrollado se construyó en base a poder controlar la velocidad de un motor de inducción, el cual presenta ventajas respecto del motor de CD, tales como un menor costo; mayor relación potencia-peso, requiere menos mantenimiento, y puede trabajar en ambientes no aptos para este.
La topología desarrollada es la del accionador con salida por tensión y onda PWM, con lo cual podemos disminuir el contenido armónico, además de que es posible realizar una variación continua de la velocidad.
Los dispositivos de potencia utilizados (IGBT's), presentan las ventajas de poder emplear una frecuencia de conmutación alta, no presentan sobretensiones en las conmutaciones de encendido y apagado, además de que estas se realizan en un tiempo muy corto; otro punto importante es que no fue necesario utilizar "snubbers", además de que al utilizar los IGBT's de modo integrado en un mismo encapsulado, se eliminaron los problemas que involucra el cableado de los mismos.
El tipo de control implementado fue en régimen permanente, con el propósito principal de.mantener la velocidad en un valor prefijado, y presentar una buena respuesta ante transitorios. Las aplicaciones donde es posible utilizarlo son: sistemas de ventilación, bombeo, molinos. Un punto muy importante del esquema de control desarrollado es la regulación del deslizamiento y la compensación en bajas frecuencias con el objeto de mantener el par constante en todo el rango de velocidad.
Se realizó un estudio del motor, basado en el modelo en régimen permanente, para obtener sus ecuaciones básicas. A partir de estas se concluyen las características que presenta el control en regimen permanente, y la operación del motor en la zona de bajos deslizamientos.
Se realizaron los siguientes análisis, los cuales pueden ser utilizados como guía de diserio para casos similares:
Se describe el procedimiento para encontrar los parametros del motor a partir de pruebas de laboratorio.
Se describe la obtención de la curva tensión-frecuencia compensada de acuerdo a los parametros del motor utilizado.
Se presenta el método para diseñar y sintonizar el controlador, así como la identificación del proceso y el análisis de estabilidad del sistema.
Se presenta el análisis térmico de la etapa de potencia, en estado estable y transitorio.
76

CAP/TUlO V I - CONCLUSIONES.
Los valores de tensión y frecuencia que debe entregar el accionador de acuerdo a la velocidad requerida y los parámetros del motor, se almacenan en memorias UVEPROM, con lo que es posible grabar otros valores, si se utiliza un motor con diferentes parámetros.
El arranque del motor se realiza de forma suave con ayuda del controlador, O en forma manual, empezando de cero y llevándolo hasta la velocidad requerida, en cualquier caso se tiene una menor corriente consumida que si el motor se arrancara directamente de la linea
El accionador presentó una excelente regulación de velocidad en estado estable
Las formas de onda de corriente y tensión del motor se encuentran casi en fase,
en un amplio rango de velocidad, además de una buena respuesta ante transitorios.
con lo que el factor de potencia que presenta el mismo al accionador es alto.
El contenido armónico presente es de un valor bajo, manteniéndose alrededor del 3% en un amplio rango de velocidad; siendo muy importante que se mantuviera en este valor, especialmente en bajas frecuencias, ya que así se eliminaron problemas de pulsaciones en el par.
Con lo anterior se puede concluir que el accionador desarrollado cumple muy bien con las características deseadas, por lo que es factible su utilización en las aplicaciones citadas que requieren una regulación de velocidad.
. .
V1.2.- SUGERENCIAS PARA FUTUROS TRABAJOS.
Tal como. se anotó al inicio, este trabajo representa el inicio de la línea de investigación en control de motores de CA en CENIDET, por lo que se sugieren los siguientes trabajos como una extension del mismo:
Con el objeto de mejorar el factor de potencia que presenta el accionador a la línea de CA, se recomienda implementar la corrección del factor de potencia en el rectificador de entrada.
El tipo de control en régimen permanente no se recomienda utilizarlo en aplicaciones donde se nece.sita un control preciso del par, la velocidad y la posición, por lo que se recomienda la implementación de un control en régimen dinámico.
77

APÉNDICE A
CARACTERIZACIÓN DEL MOTOR

APENDICE A.- CARACTERIZACIÓN DEL MOTOR
A.l.- MOTOR UTILIZADO.
A.l .I .- CARACTERISTICAS.
El motor utilizado en el desarrollo y pruebas del accionador, fue del tipo trifásico marca ASEA, clase B, el cual presenta caracteristicas tales como un deslizamiento a plena carga menor al 5%, corriente de arranque con un valor de cinco veces la corriente nominal, y un par de arranque igual al doble del par a plena carga. Sus datos de operación se muestran en la tabla A.1.
Tabla A.l.- Datos de operación del motor utilizado
1 No. DE POLOS POR FASE 14
A.1.2.- OBTENCIÓN DE LOS PARÁMETROS.
Con el propósito de resolver las ecuaciones que se presentaron en el capítulo I para obtener las curvas de par, corriente de estator, y factor de potencia contra deslizamiento, además de la curva compensada tensión-frecuencia específica para el motor utilizado, deben obtenerse los parámetros del mismo, teniendo como base el circuito equivalente del motor que se muestra en la figura 11.1. Para esto es necesario realizar una serie de pruebas de laboratorio, tales como la de corriente directa, operación sin carga, y la de rotor bloqueado [29], las cuales se describen a continuación.
A.1.3.- PRUEBA DE CORRIENTE DIRECTA.
El propósito de esta prueba es obtener el valor de la resistencia en CD del devanado de estator. Si una corriente directa fluye por el devanado de estator, el campo magnético permanece constante. Entonces, si la flecha del motor no está girando, los.enlaces de flujo al devanado de rotor son constantes; como resultado no se induce tensión en el rotor, no fluyen corrientes, y no hay par desarrollado. AI no existir fuerza magnetomotriz en el rotor, no tiene efecto sobre el devanado de estator. Por Io tanto se puede medir la resistencia del devanado de estator en CD, independientemente de la impedancia del rotor.
El circuito utilizado para realizar esta prueba se muestra en la figura A. 1. El potenciómetro se ajusta para' que la corriente aplicada sea la corriente nominal del motor. Aplicando la ley de Ohm al circuito se obtiene: '
79

vm 1,
2R, -
APENOICE A,- CARACTERIZACIÓN DEL MOTOR.
(A. 1)
despejando R,, se obtiene:
Fig A 1.- Circuito para la pmcba en CD.
En el caso del motor utilizado, los datos que se obtuvieron después de realizar esta prueba fueron los siguientes:
Vc, = 17.7 V. IcD=3A.
A.1.4.- PRUEBA SIN CARGA.
El propbsito de la realización de esta prueba es la evaluación de las pérdidas, además de la obtención de la impedancia de estator sin carga, así como de la. reactancia magnetizante. En la figura A.2 se muestra el esquema del circuito utilizado, y en la figura A.3 se muestra el efecto de no tener carga mecánica en el circuito equivalente del motor. En este caso la carga mecánica por fase, representada por RNL=(Rr(l-s))/si está dada solamente por la resistencia del aire y la fricción de la máquina. Dado que esta carga representa sólo una pequeña parte de la carga mecánica nominal, el deslizamiento es muy pequeño, y por lo tanto, el valor de la expresión anterior es muy grande comparado con Xz y R,. .Por io tanto la potencia de entrada sin carga viene dada por la suma de las pérdidas de cobre en el estator y las pérdidas debidas a la fricción, resistencia del aire y el núcleo:
donde: Pm = P. + P,
P, = 3 I h R ,
80

AKNDICE A.- CARACTERlZAClbN DEL MOTOR.
siendo INL el promedio de las corrientes de estator; despejando PC de A.3 se obtiene la expresión que define las perdidas por fricción, resistencia del aire y el núcleo, la cual está dada por:
r: p,, - 3 I:, 4 (A.5)
n
LINEA TRlFASlCA F-----,/ MOTOR ) DE CA -
Fig. A.2.- Esquema de la prueba del motor operando sin carga.
I - ""0
J5
Fig. A 3 - Circuito quivalenic del motor de inducci6n mosirando el efecto de la auscncia dc carga mccánica
Operando sin carga, el factor de potencia que presenta el motor es de un valor muy bajo, por io tanto, el circuito es esencialmente reactivo Esto significa que R, es muy pequeña comparada con Xi, y que Rr es mucho más grande que X,,,. Por lo tanto, la impedancia de entrada sin carga es aproximadamente Xi y X, en serie, es decir:
z x, f xm VNL lz,I = - J3 I,
despejando X, se obtiene la expresión para la reactancia magnetizante, la cual está dada por:
a i

APCNDICE A,- CARACTERlZACl6N DEL MOTOR.
Después de haber realizado esta prueba, se obtuvieron los siguientes datos:
V N L = 2 1 7 W . INL = 1.65 A. PNL= 232 W. f=60Hz.
A.l S.- PRUEBA A ROTOR BLOQUEADO.
Para la realización de esta prueba la flecha del motor se bloquea para impedir que gire, por lo tanto se tiene um=O y s = l . Si se aplicara la tensión especificada a la frecuencia nominal, se tendria una corriente del orden de cinco veces la corriente especificada. Por esta razón 'la tensión se ajusta de tal forma, que la corriente a rotor bloqueado sea igual a la corriente nominal. Además se recomienda que la frecuencia a la que se realiza la prueba sea menor a un 25% de la frecuencia nominal del motor.
Bajo condiciones normales de operación, la frecuencia de la corriente de estator es igual a la frecuencia de alimentación, f,, mientras que la frecuencia de la corriente de rotor es igual a sf,. En la, prueba a rotor bloqueado, se tiene que el deslizamiento es unitario, por lo tanto, las corrientes de estator y rotor están a la misma frecuencia.
I I
FUENTE TRlFASlCA
TENSION Y FRECUENCIA VARIABLES
ROTOR
Fig A 4 - Circwfo para la realización de la prueba a rotor bloqueado
BLOQUEADO
El esquema del circuito para la realización de esta prueba se muestra en la figura A4. Para la realización de esta prueba se utilizó el accionador desarrollado.
a2
APSNDICE A: CARACTERlZACldM DEL MOTOR.
La tensión aplicada a una fase del devanado de estator está dada por:
siendo VBR la tensión a rotor bloqueado, mientras que la impedancia a rotor bloqueado de una fase viene dada por:
donde IBR es el promedio de las tres corrientes de estator y debe ser igual a la corriente nominal. Con deslizamiento unitario RJs = R,, la tensión aplicada es muy baja, por lo tanto el núcleo permanece sin saturación. Dado que X, es mucho mayor que R,+XÍ, el efecto de X, puede despreciarse, y se obtiene la expresión de la impedancia a rotor bloqueado:
Z , , = R , , + j X i , = R , + R , + j X i R (A. 1 O)
donde XBR representa la impedancia a rotor bloqueado a'la frecuencia que se realiza la prueba, y está dada por:
x;3,< = x; +x, (A.l l)
La expresión de la parte real de ZBR es:
ó
donde:
(A.12)
(A. 13)
(A. 14)
Sustituyendo A.2 en A.12 y despejando R, se obtiene la expresión que define la resistencia del rotor, la cual esta dada por.
'BR __ V C D
- I ü R - 2I,, R, = R,, - R - (A. 15)
a3

APENDICE A: CARACTERiZACibN DEL MOTOR.
TIPO DEROTOR Devanado Clase A Clase B Clase C Clase D
La parte imaginaria de ZBR está dada Por
xiR = Iz,( sene,, (A. 16)
X' BR =Jm (A. 17) ó
RELACIÓN DE X, y Xz RESPECTO DE XBR
xi =xZ=o 5 XBR
xi =x2=0 5 XBR
Xi = O 4 x~,, xz=o 6 XBR xi = o 3 XIiR , xz = o 7 XIiR
Xi = Xz = 0.5 XDK
(A. 18)
Si f. es la frecuencia nominal, y ft representa la frecuencia a la cual se realizó la prueba, entonces:
f"
f, x, = - X' BR (A. 19)
dado que las reactancias de dispersión son proporcionales a la frecuencia, y están definidas a fl=fn. La reactancia a rotor bloqueado está dada por:
(A.20)
Una forma aproximada de determinar la relación de XI y X2 respecto a XBR está basada en la experiencia con estas máquinas. La relación para cada tipo de rotor se muestra en la tabla A.2.
x,, = x, + x,
Tabla A.2.- Relación de XI y X, respecio de XBn.
Los datos obtenidos al realizar esta prueba fueron los siguientes:
V s ~ = 2 9 V . IBR = 3.0A. PBR = 130 W.
o f=15Hz. OBR=~OO
a4

APENDiCE A,- CARACTERIZAClbN DEL MOTOR.
A.1.6.- OBtENCIÓN DE LOS PARAMETROS.
A continuación se muestran los datos obtenidos después de realizar las pruebas anteriores.
CD SIN CARGA ROTOR BLOQUEADO Vco=17.7V Vw=217V VBR = 29 V I c ~ = 3 . 0 A Iw= 1.65 A IBR = 3.0 A
Pm=232W PW.=130W f = 60 Hz f = 1 5 H z
@BR = 30'
De acuerdo a estos datos y utilizando las ecuaciones deducidas, se procede a calcular los parámetros del motor:
utilizando la ecuación A.2, la resistencia de estator es:
R, = 2.95n
de A.9, la impedancia a rotor bloqueado es:
de A.lO, la parte real de la impedancia es:
R,, = 4.81R
de A.16 la parte imaginaria es:
Xi = (5.58) sen(30")
Xi = 2.¡9R

APCNDICE A: CARACTERIZACibN DEL MOTOR.
sustituyendo los valores correspondientes en la ecuación 111.19, la reactancia a rotor bloqueado a la frecuencia nominal es:
60 15
X, = - (2.79)
X, = 11.16R
utilizando los datos de la tabla A.2, las reactancias de dispersión de estator y rotor son:
X, = 0.4(11.16)
X, = 4.46R
X, = 0.6(11.16)
X, = 6 70R
a partir de la ecuación A.15, la resistencia de rotor es igual a:
R, = 4 81- 2.95
R, = 1.86R
utilizando la ecuación A.6, la impedancia sin carga es:
z, = 75.93R
mientras que a partir de la ecuación A.7 la reactancia magnetizante es:
X m = 7593-446
X m = 71 47R
los valores de las inductancias de estator, rotor, y magnetizante son respectivamente:
L, = 12mH L, = 18mH L, = 190mH

AP&üICE A.- CARACTERIZAClbN DEL MOTOR.
A continuación se muestran los parámetros del motor obtenidos:
R, = 2.95 R X. = 71.47 0 Rr=1.86R Li=12mH x, = 4.46 n L2 = 18 mH Xz = 6.70 R L, = 190 mH
A.1.7.- CURVAS CARACTERíSTICAS.
A continuación se muestran las curvas caracteristicas del motor utilizado, las cuales se obtienen resolviendo las ecuaciones presentadas en el capitulo I, utilizando los parámetros del motor
N-rn
10
5
O
-5
-10
1 0.8 0.6 0.4 0.2 O -0.2 -0.4 -0.6 -0.8 -1 Fig. A5.- Curva pardeslizamiento.
En la figura A.5 se muestra la curva par-deslizamiento, donde se puede apreciar la similitud con la gráfica de la figura 1.3. Se observan dos puntos de par máximo: uno positivo con un valor aproximado de 8 N-m; y uno negativo, con un valor aproximado de -1 3 N-m. Además se puede apreciar un par de arranque con un valor aproximado de 3 N-m.

&NmCE A,- CARACTERIZACIÓN DEL MOTOR.
La curva corriente de estator-deslizamiento se muestra en la figura A.6. En la figura A.7 se comparan las curvas corriente de estator-deslizamiento y par- deslizamiento, donde se puede apreciar una corriente de arranque de 10 A.
8
6
4
2
O
1 0.9 0.8 07 0.6 0.5 0.4 0.3 0.2 0.1 O Fig. A.7.- Curvas pardeslizamiento. comente de estatordeslizamient.
aa

APGNDICE A - CARACTERiZACibN DEL MOTOR.
N-m,A
10
8
6
. 4
2
O 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 O
Fig. A.8.- Curvas pardeslizamiento, comente de estator-deslizamiento, 2*factor de potencia-deslizamiento.
Con el propósito de apreciar las ventajas de trabajar en la zona de bajos deslizamientos se muestra la figura A8; se comparan las curvas par- deslizamiento, corriente de estator-deslizamiento y factor de potencia- deslizamiento. Pueden apreciarse las características mencionadas en el capítulo l tales como una relación lineal de la corriente contra el par, y un alto factor de potencia.
89

REFERENCIAS.
REFERENCIAS
[I].- G: McPherson, R. D. Laramore, An introduction to electrical machines and transformers. 2nd. ed. (Singapore.: John Wiley & Sons Inc. 1990), pp. 239- 290.
[2].- J. L. APARICIO-MARZO, "Crjterios de diseno de convertidores estáticos para accionamientos regulados en corriente alterna con motores de inducción". (Tesis Doctoral; Madrid: Universidad Politécnica de Madrid, 1987).
(Singapore.: John Wiley & Sons Inc. 1989), pp.-271-284. [3].- P. C. SEN, Princides of electric machines and Dower electronics.
[4].- I. L. KOSOW, Control de máauinas eléctricas. (México, D. F.: Editorial Reverté 1991), pp, 125-149.
[5].- J. L. APARICIO, a. ;>
[6].- G. McPHERSON, et al, OP..
[7].- P. C. SEN, d.
[8].- G. R. SLEMON, "Electrical machines for variable frequency drives", (en: Proceedinas of the IEEE, Vol. 82, No. 8, August 1994), pp. 1123-1240.
[9].- P. VARGAS, "Ventajas del uso de motores eléctricos de alta eficiencia", (en: FIDE. Eneraía racional, Vol. 3, No. 11, Julio de 1994), pp. 26-30.
[lo].- R. D. LORENZ, T. A. LIPO, D. W. NOVOTNY, "Motion control with induction motors", (en: Proceedinas of the IEEE, Vol. 82, No. 8, August 1994), pp. 1215-1240.
[ l I].- J. L. APARICIO MARZO, a [12].- B. K. BOSE, Adiustable speed drive systems. (New York, N. Y.: IEEE Press
1981), pp. 1-21.
[13].- w. (141.- P. N. ENJETI, .P. D. ZIOGAS, J. F. LINDSAY, "Programmed PWM
techniques to eliminate harmonics: a critical evaluation", (en: transactions on industw apPlications, Vol. 26, No. 2, March-April, 1990), pp. 302-31 6.
90

REFERENCIAS.
[15].- D. A. GRANT, “Techniques for pulse dropping in pulse width modulated inverters”, (en: IEE proceedinas, Vol. 128, No. I, January 1981), pp, 67-72.
[16].- M. A. BOOST, P. D. ZIOGAS, “State of the art carrier PWM techniques: a critical evaluation”, (en IEEE Transactions on industrv applications, Vol. 24, No. 2, March-April 1988), pp. 271-280.
(171.- B. K. BOSE, Modern power electronics, (New York, N. Y.: IEEE Press 1992),
[18].- POWEREX, “Technical databook for intelligent power modules”, 1990.
[19].- V. M. CARDENAS-GALINDO, “Diseño e implementación de un convertidor CD-CA monofásico para aplicación en sistemas de alimentación ininterrumpibles”. (Tesis de Maestría; Cuernavaca: Centro Nacional de Investigación y Desarrollo Tecnológico, 1994).
pp. 3-12.
[20].- Disipadores Electrónicos S. A,, “Catálogo de disipadores”:
[21].- POWEREX, OD..
[22].- S. HORTA-MEJíA, “Aplicación de las técnicas de interrupción estática en C.A. al diseño de un nuevo interruptor para el disparo del reactor en una central nuclear”, (Tesis Doctoral; Madrid: Universidad Politécnica de Madrid,
1231.- HOANG LE-HUY, “Microprocessors and digital .IC’s for motion control”, (en: Proceedinas of the IEEE, Vol. 82, No. 8, August 1994), pp. 1140-1 163.
1991 ).
[NI.- J. ALVAREZ-GALLEGOS, M. BONILLA ESTRADA. Introducción a la identificación de procesos. México, D.. F.:. Centro de Investigación y estudios avanzados del IPN, Departamento de Ingeniería Eléctrica. Mayo de 1983, 153 p.
[25].- W. GRESHOCK, J. WEBB, Industrial control .electronics. 2nd. ed. (New
[26].- K. OGATA, Ingeniería de control moderna, la.’Ed. (México, D. F., Prentice
York, N. Y., Macmillan Publishing Company 1993), pp. 402-424.
Hall Hispanoamericana, 1980), pp. 164-200.
[27].- A. B. CORRIPIO, Tuninq of industrial control svstems. (North Carolina.: Instrument Society of America 1990), pp. 65-81.
91

REFERENCIAS.
[28].- K. OGATA, u., pp. 273-280.
[29].- G. McPHERSON, et al, ODcit.
92

. i. .