centro estadual de educação tecnológica paula souza ... filefigura 16 – produto pronto ......
TRANSCRIPT

TRABALHO DE CONCLUSÃO DO CURSO TÉCNICO EM
Posso Ajudar?
Fernanda Paola B. Nascimento Matheus Duarte Domingos
Matheus Gabriel da Silva
Professor Orientador: Salomão Choueri Junior
São Caetano do Sul / SP 2015
Centro Estadual de Educação Tecnológica Paula Souza
GOVERNO DO ESTADO DE SÃO PAULO
ETEC “JORGE STREET”

Posso Ajudar?
Trabalho de Conclusão de Curso apresentado como pré-requisito para obtenção do Diploma de Técnico em Eletrônica
São Caetano do Sul / SP 2015

DEDICATÓRIA A Deus, aos nossos pais, irmãos, professores e todos os amigos que nos ajudaram durante esses três anos.

AGRADECIMENTOS Agradecemos aos nossos pais que nos proporcionaram a experiência de passar três anos de nossas vidas em um curso técnico integrado. Sempre nos apoiando, incentivando e na torcida pela nossa formação. Aos nossos professores, não cabem palavras para explicar a gratidão que temos pelos senhores (as). As horas dedicadas a nós, a experiência que nos transmitiram ao carinho e atenção. Muitas vezes pensávamos que não poderia dar certo, nas dificuldades recebemos deles força necessária para continuarmos o projeto. Acreditaram que nós seriamos capazes e aqui estamos. Professores que fizeram papel de pai e mãe, nos orientando, dando broncas, quando necessário, e se preocupando conosco, sempre. Tuca, Enrico, família Pego, Tia Tati, Dona Elizete, costureira e todos os que torcem por nós... Obrigada.

RESUMO
A bengala Posso Ajudar foi adaptada com dispositivos eletrônicos para auxiliar o
cego no seu dia a dia. A inclusão social é o resultado que almejamos com a
adaptação. Ela é constituída por: uma bengala (convencional), dois sensores
ultrassônicos um para detectar obstáculos aéreos e outro para obstáculos na
superfície, possui também dois motores que recebem informações de um
microcontrolador (ATMEGA328) e transforma as mesmas em vibrações que variam
de intensidade dependendo da distancia do objeto.
Palavras-chave: Segurança; Acessibilidade; Inclusão Social.

LISTA DE FIGURAS
Figura 1 – Título da Figura ........................................... Erro! Indicador não definido.
Figura 2 – Título da Figura ........................................... Erro! Indicador não definido.
Sumário
INTRODUÇÃO .................................................................................................................................................... 15
1. – FUNDAMENTAÇÃO TEÓRICA ................................................................................................................. 9
1.1. - SINAL ULTRASSÔNICO .......................................................................................................................... 9
1.2 – MICROCONTROLADOR ........................................................................................................................ 13
1.3 – O Hardware ........................................................................................ Erro! Indicador não definido. 1.4 - O Software ....................................................................................................................................... 15 1.5- PWM 16 ........................................................................................................................................................ 18
2– PLANEJAMENTO E DESENVOLVIMENTO DO PROJETO ................................................................. 19
2.1.1- DIAGRAMA EM BLOCOS ..................................................................................................................... 20
FIGURA 12 - DIAGRAMA EM BLOCOS ......................................................................................................... 20
3 - DESENVOLVIMENTO DO PROJETO ...................................................................................................... 22
FIGURA 16 – PRODUTO PRONTO ................................................................................................................ 23
3.1- HARDWARE ............................................................................................................................................... 23
4 –CONCLUSÃO ................................................................................................................................................ 27
REFERÊNCIAS .................................................................................................................................................. 28
Introdução
Nosso (Trabalho de Conclusão de Curso) consiste em uma bengala retrátil com dispositivos eletrônicos: microcontrolador, sendo este responsável pela programação e execução dos demais dispositivos envolvidos no projeto, que são uma única pulseira no pulso (carpo) direito, com dois motores vibracais, um na parte inferior do pulso, e a outra na parte superior;. Há também dois componentes primordiais que são: dois sensores ultrassônicos para obstáculos aéreos e na superfície e a Push Botton que inicializará o processamento do microcontrolador e para finalizar uma chave liga/desliga. Na construção da bengala tomou-se cuidado para que a posição dos dois sensores não afete o fechamento da mesma. Através dessa bengala, qual batizamos de Posso Ajudar, o deficiente visual irá se guiar com mais facilidade e segurança pelas ruas, parques, entre outros lugares tanto públicos como privados, pois a parte eletrônica avisa se há ou não obstáculos que podem representar perigo físico para a pessoa cega. Possibilitando um trajeto seguro para a pessoa. Nosso objetivo é de promover mais independência dos portadores da bengala eletrônica, permitindo melhor mobilidade em seu caminho. O usuário terá confiança em andar e entrar em lugares públicos. Vimos que a maior necessidade de um cego hoje é de ter acessibilidade e comodidade em seu trajeto. Com isso vimos que os serviços públicos não lhes oferece uma estrutura suficiente para atendê-los, ocasionando assim acidentes muitas vezes fatais. Noticiários nos mostram diariamente acidentes com deficientes que andam sozinhos e não conseguem fugir de carros, motocicletas e até mesmo de galhos. A percepção deles em relação aos objetos é a nossa ideia de auxilia-los, pois eles necessitam de independência, comodidade e acessibilidade em todos os lugares. O projeto tem um custo acessível e é de uso individual, porém feita de materiais resistentes e seus componentes são recicláveis. O deficiente visual para utilizar precisará apenas de atenção e cautela ao manusear a bengala. Para definição do projeto consultamos nosso orientador e alguns professores da área de Eletrônica, colegas de classe além de conversas e realizamos uma pesquisa de campo com pessoas cegas ou com baixa visão. Os resultados obtidos devem-se às visitas em algumas fundações que atendem o nosso público que é o deficiente visual. A saber: a fundação Dorina Nowill localizada no endereço: R. Dr. Diogo de Faria, 558 - Vila Clementino, São Paulo; e na Associação LaraMara R. Brg. Galvão, 708 - Barra Funda, São Paulo.

9
1. – Fundamentação Teórica
A tecnologia que utilizamos nesse capítulo será abordada de uma maneira geral e
com o intuito de ser de fácil compreensão. A informação técnica de cada
componente será abordada a seguir, a saber, nos capítulos vindouros.
1.1. - SINAL ULTRASSÔNICO
Ondas superiores a 20 000 hertz (Figura 01) são denominadas de ultrassom. Com
isso foi criado um dispositivo eletrônico capaz de realizar o que nós humanos não
conseguimos captar que é essa faixa de frequência. Logo o princípio de operação
desses sensores é exatamente o mesmo do sonar, usado pelo morcego e pelo
golfinho respectivamente para detectar objetos e presas em seu vôo cego e para se
direcionar e se comunicar.
(Disponível em :http://www.ebah.com.br/content/ABAAAA45sAC/ultrassom)
Figura 01 - Espectro de sons
Especificando melhor esse dispositivo que funciona como um detector de objetos e
permite medir distâncias de dois centímetros no mínimo e podendo chegar a
distâncias máximas de até quatro metros com uma precisão de três milímetros.
Estes sensores emitem um sinal ultrassônico que reflete em um objeto e retorna ao
sensor (eco). O sinal de retorno é captado, permitindo-se deduzir a distância do
objeto ao sensor tomando o tempo de trânsito do sinal.

10
Figura 02 – onda ultrassônica
(Disponível em: http://dev.laptop.org/pub/content/wp/pt/Sonar.html)
A velocidade do sinal som no ar é de aproximadamente 340 m/s, logo se o sensor estiver a uma distância “d” do objeto o sinal percorrerá uma distância equivalente a “2d” para sair e retornar ao sensor. Sabendo esses conceitos é possível calcularmos a distância de um objeto pela fórmula:
Disponível em: https://ferpinheiro.wordpress.com/2011/04/29/meu-primeiro-projeto-
arduino-sensor-ultrasonico-hcsr04/
Figura 03 – Formula
1.1.2 – Sensor Ultrassônico
O sensor escolhido para o desenvolvimento do projeto foi o sensor ultrassônico HC-SR04.
(Disponível em: http://eletronicos.mercadolivre.com.br/pecas-componentes-eletricos/sensor-
ultrasonico
11
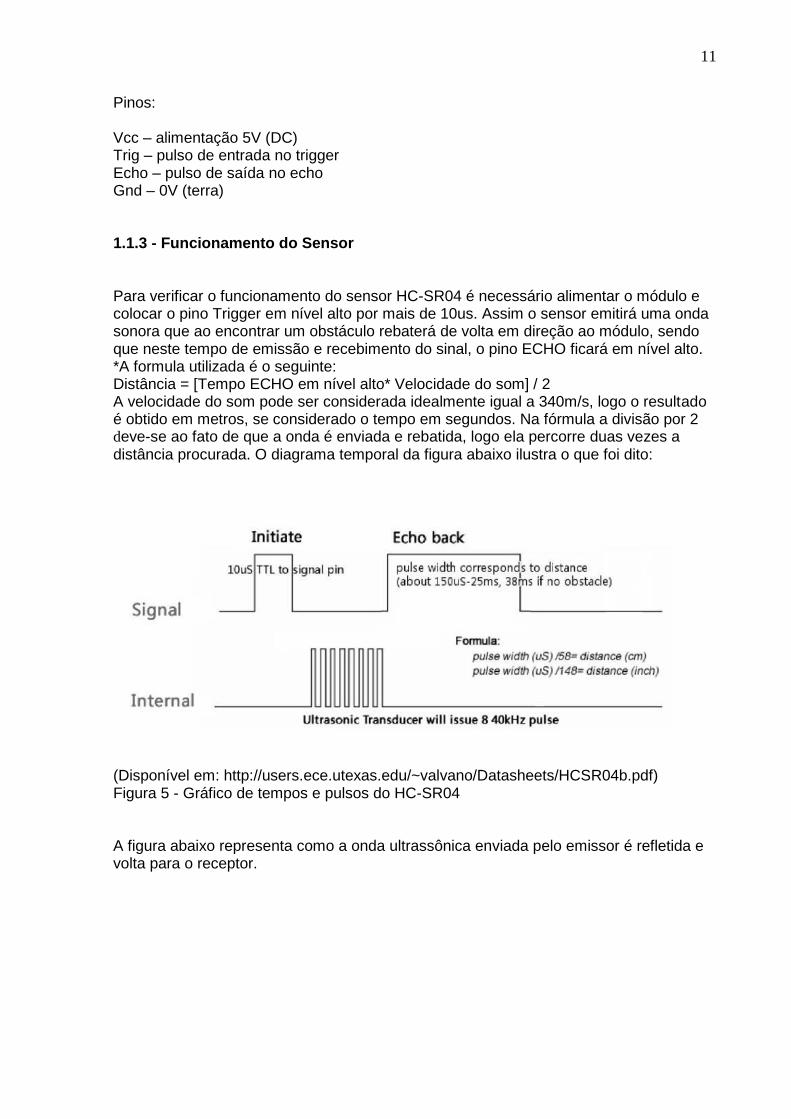
Pinos: Vcc – alimentação 5V (DC) Trig – pulso de entrada no trigger Echo – pulso de saída no echo Gnd – 0V (terra) 1.1.3 - Funcionamento do Sensor Para verificar o funcionamento do sensor HC-SR04 é necessário alimentar o módulo e colocar o pino Trigger em nível alto por mais de 10us. Assim o sensor emitirá uma onda sonora que ao encontrar um obstáculo rebaterá de volta em direção ao módulo, sendo que neste tempo de emissão e recebimento do sinal, o pino ECHO ficará em nível alto. *A formula utilizada é o seguinte: Distância = [Tempo ECHO em nível alto* Velocidade do som] / 2 A velocidade do som pode ser considerada idealmente igual a 340m/s, logo o resultado é obtido em metros, se considerado o tempo em segundos. Na fórmula a divisão por 2 deve-se ao fato de que a onda é enviada e rebatida, logo ela percorre duas vezes a distância procurada. O diagrama temporal da figura abaixo ilustra o que foi dito:
(Disponível em: http://users.ece.utexas.edu/~valvano/Datasheets/HCSR04b.pdf) Figura 5 - Gráfico de tempos e pulsos do HC-SR04 A figura abaixo representa como a onda ultrassônica enviada pelo emissor é refletida e volta para o receptor.

12
(Disponível em: http://www.newtoncbraga.com.br/index.php/robotica/3484-mec081) Figura 6 - Emissão e captação do sinal ultrassônico
(Disponível em:https://docs.google.com/document/d/1Y-
yZnNhMYy7rwhAgyL_pfa39RsB-x2qR4vP8saG73rE/edit?pli=1) Figura 7 - Gama efetiva do HC-SR04
A figura acima representa a gama efetiva alcançada pelo HC-SR04, que chega a cerca de 30°.

13
1.1.4 - Informações Importantes sobre o Componente
Figura 8 - Tabela de informações sobre o componente.
(Disponível em:https://docs.google.com/document/d/1Y-
yZnNhMYy7rwhAgyL_pfa39RsB-x2qR4vP8saG73rE/edit?pli=1)
Figura 9 - Dimensões do HC-SR04
1.2 – Microcontrolador
Um microcontrolador (µC) é um computador em um chip, contendo um processador, memória e periféricos de entrada/saída. Ele é programado para executar funções especificas, ou seja, cria-se um programa e ele fará linha por linha. Ele é acoplado no interior de algum outro dispositivo geralmente um CI (circuito integrado) para que possam controlar as funções ou ações do produto.

14
Uma plataforma de prototipagem eletrônica, criado por: Massimo Banzi, David Cuartielles, Tom Igoe, Gianluca Martino e David Mellis em 2005 com objetivo de permitir o desenvolvimento de controle de sistemas interativos, barato, funcional e fácil de programar além de ser acessível a todos: o projeto foi criado pensando em artistas e amadores, ou seja, não é necessário ter conhecimentos prévios em eletrônica ou programação para poder utilizá-lo. Com o Arduíno é possível também enviar e receber informações de praticamente qualquer outro sistema eletrônico. Desta forma é possível construir, por exemplo, um sistema de captação de dados de sensores, como a plataforma Arduíno utiliza o microcontrolador ATMEGA328 trata-se de uma forma de utilização. Outra característica importante é que todo material (software, bibliotecas, hardware) é open-source, ou seja, pode ser reproduzido e usado por todos sem a necessidade de pagamento de royalties ou direitos autorais.
A plataforma é composta essencialmente de duas partes: O Hardware e o
Software.·.
(Disponível em: http://labdegaragem.com/forum/topics/com-o-m-dulo-bluetooth-hc-
06)
Figura 04 - Estrutura do microcontrolador

15
1.3- Hardware
(Disponível em: http://labdegaragem.com/forum/topics/com-o-m-dulo-bluetooth-hc-06)
Figura 05 – Arduino Uno
Resumidamente o hardware é uma placa eletrônica que, possui todos componentes necessários para a maioria dos projetos; Contém uma eletrônica que permite usar a placa com diversas fontes de energia, baterias e fontes de alimentação; Permite o acoplamento de circuitos externos através de pinos de conexão em posições padronizadas; A eletrônica é baseada em componentes de fácil obtenção, inclusive no mercado brasileiro; O esquema da placa é livre, e pode ser facilmente modificado ou adaptado. A placa é programada, ou seja, escrevemos um software que ficará embutido no chip controlador (firmware).
1.3 - O Software
O Arduíno é um compilador GCC (C e C++) baseado em Wiring e que usa uma interface gráfica construída em Java baseado no projeto Processing. Isso tudo se resume a um programa IDE (ambiente de desenvolvimento integrado) muito simples de usar e de estender com bibliotecas que podem ser facilmente encontradas na internet e até mesmo feitas pelo projetista. Depois de criar o programa e compilar usando a IDE, o código gerado é enviado para a placa onde é gravado dentro do chip controlador. Esse software que roda na placa chama-se FIRMWARE.

16
As funções da IDE do Arduino são basicamente duas: Permitir o desenvolvimento de um software e enviá-lo à placa para que possa ser executado.
(Disponível em: http://labdegaragem.com/forum/topics/com-o-m-dulo-bluetooth-hc-06)
Figura 06 – Ambiente de desenvolvimento do Arduino IDE
1.5- PWM
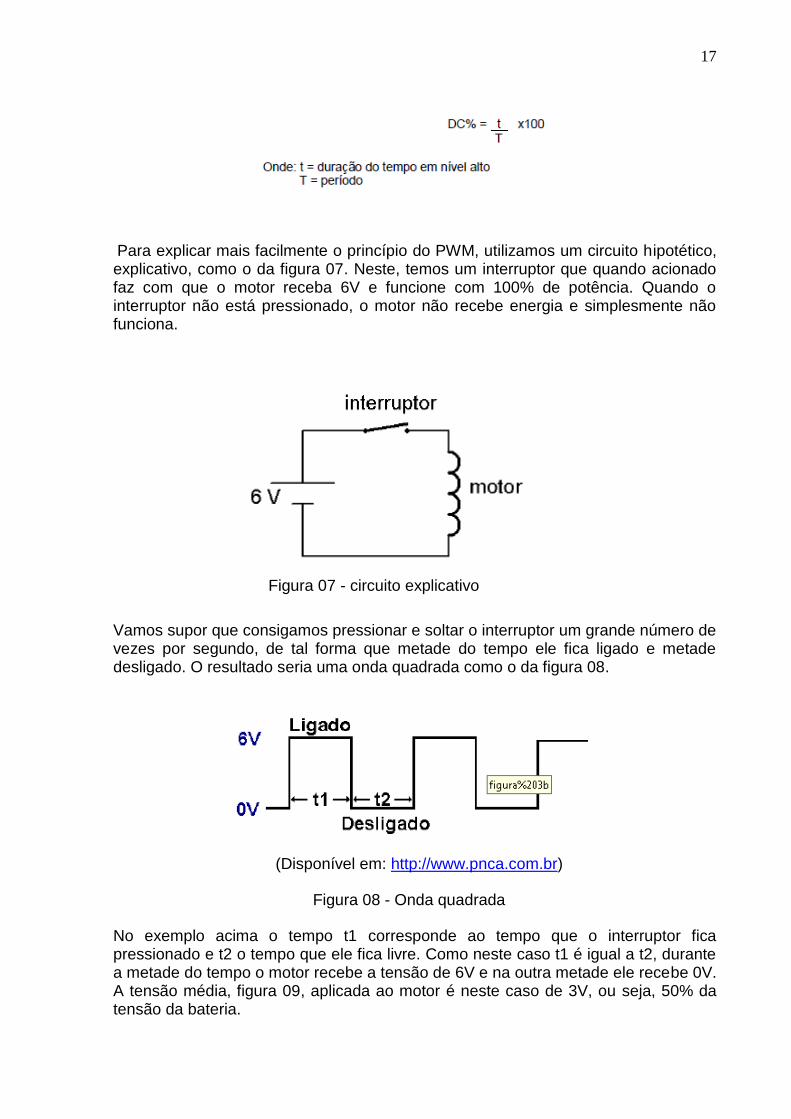
PWM significa "Pulse Width Modulation" ou Modulação de Largura de Pulso, ou seja, é uma tecnologia que consiste em modular pulsos digitais através da largura dos mesmos. Tendo uma referencia média de tensão nesses sinais digitais. Essa tecnologia permite controlar a potencia que será entregue a carga. Por exemplo, controlaremos velocidade de um motor DC (Corrente Contínua) por meio de PWM. Modular a largura do pulso é basicamente, mudar a largura do ciclo de trabalho ou ciclo ativo, em inglês, duty cycle. O ciclo de trabalho em ondas quadradas (sinal que é utilizado em nosso trabalho) é dado por: DC% = t x100 T Onde: t = duração do tempo em nível alto T = período
17
Para explicar mais facilmente o princípio do PWM, utilizamos um circuito hipotético, explicativo, como o da figura 07. Neste, temos um interruptor que quando acionado faz com que o motor receba 6V e funcione com 100% de potência. Quando o interruptor não está pressionado, o motor não recebe energia e simplesmente não funciona.
Figura 07 - circuito explicativo
Vamos supor que consigamos pressionar e soltar o interruptor um grande número de vezes por segundo, de tal forma que metade do tempo ele fica ligado e metade desligado. O resultado seria uma onda quadrada como o da figura 08.
(Disponível em: http://www.pnca.com.br)
Figura 08 - Onda quadrada
No exemplo acima o tempo t1 corresponde ao tempo que o interruptor fica pressionado e t2 o tempo que ele fica livre. Como neste caso t1 é igual a t2, durante a metade do tempo o motor recebe a tensão de 6V e na outra metade ele recebe 0V. A tensão média, figura 09, aplicada ao motor é neste caso de 3V, ou seja, 50% da tensão da bateria.

18
(Disponível em: http://www.pnca.com.br) Figura 09 - Ciclo de trabalho de 50%
É claro que não é possível usar um interruptor em um circuito com PWM, pois não conseguiríamos pressioná-lo na velocidade necessária. Mas o PWM pode ser feito de diversas maneiras, no caso do nosso projeto o PWM foi feito por software. Abaixo temos imagens de outras ondas quadradas moduladas em outros ciclos de trabalho, utilizando a mesma situação exemplo mostradas acima neste capítulo.
(Disponível em: http://www.pnca.com.br)
Figura 10 - Ciclo de trabalho de 30%
(Disponível em: http://www.pnca.com.br) Figura 11 - Ciclo de trabalho de 80%
19
2– Planejamento e desenvolvimento do Projeto
Nós projetamos o nosso projeto com o interesse de obter o melhor resultado
possível para ajudar os nossos usuários. A seguir você poderá acompanhar o que
nós nos realizamos em duas áreas: Mecânica e Eletrônica
2.1-1 Parte Eletrônica
Nosso projeto é fundamentado por quatro partes essenciais: a bengala retrátil,
dois sensores ultrassônicos um microcontrolador (µC) e uma pulseira com dois
motores.
A bengala contém um dispositivo de acionamento, uma push bottom, que permitirá
ligar a bengala. Apenas ligar. Ao ser pressionada, o µC emitirá um pulso com
duração de 5 (cinco) segundos para demonstrar que a bengala está operante.
Os dois sensores ultrassônicos HC-SR04 são dispostos ao longo da bengala, um na
parte mais inferior dela para detectar obstáculos na superfície e o outro em um ponto
mais superior da mesma, detectando obstáculos aéreos.
O µC calculará, através dos resultados obtidos pelos sensores, a distância do objeto,
e através desse cálculo modulará pulsos com diferentes frequências para acionar a
pulseira. Essa modulação será proporcional à frequência, que por sua vez ora será
cada vez mais com um período menor, ora com um período maior. Dependendo do
resultado obtido.
Esse sinal advindo do µC permitirá que a pulseira vibre conforme a frequência e pela
vibração o usuário terá a noção se o empecilho está próximo.
Além de proporcionar a distância, ele também terá um programa de interrupção.
Esse breve programa, verifica se a bengala está sendo inutilizada. Caso a bengala
permaneça 5 (cinco) minutos na mesma posição, ela desligará automaticamente,
tendo o usuário acionar a Push buttom para liga-la novamente.
20
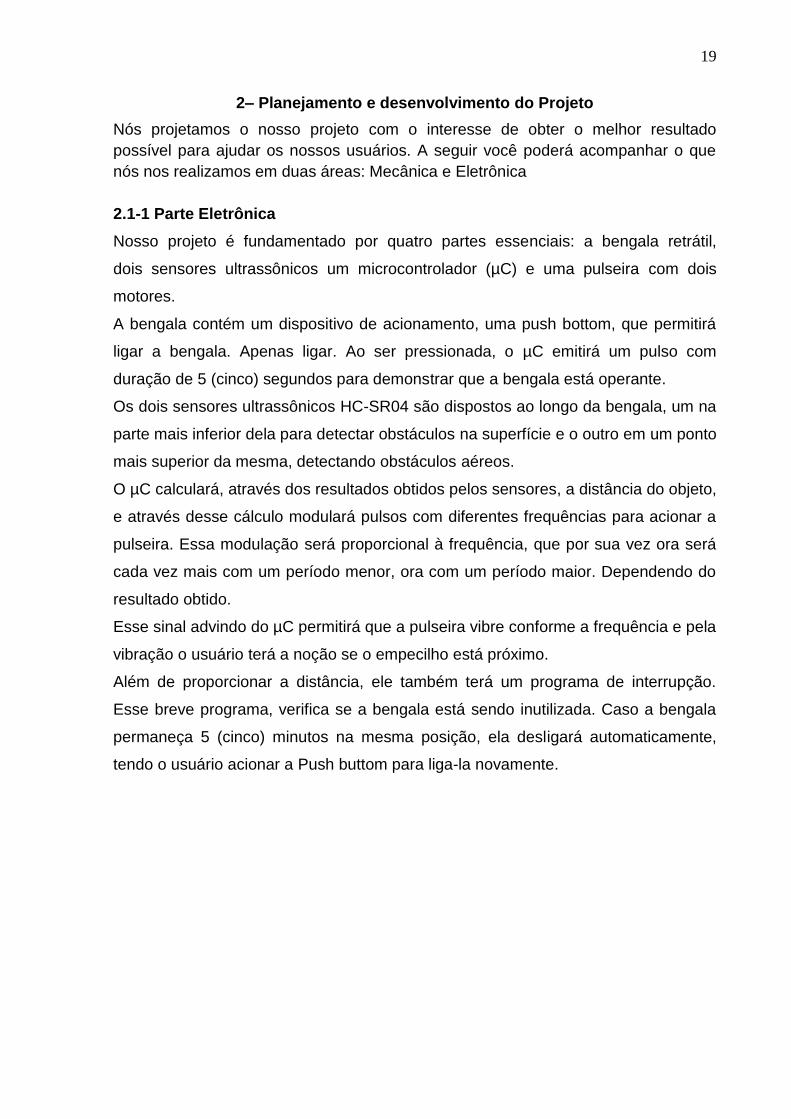
2.1.1- Diagrama em Blocos
O diagrama em blocos mostra todas as entradas e saídas que contém em nosso projeto e por onde passam essas entradas e saídas, no caso no microcontrolador ATMEGA328, como podemos ver no esquema abaixo (Figura 12).
Figura 12 - Diagrama em Blocos
2.1.2- Layout
Na figura abaixo (Figura 13), está o layout da interface de potência para o motor de vibração DC e
a alimentação do mesmo, feito em uma placa virgem.

21
2.2 - Lógica do Projeto A parte lógica da “Posso Ajudar”, é a parte mais complexa do nosso projeto e este capítulo contém tudo que é necessário para entender o funcionamento da parte lógica, como: fluxograma do processo e o programa implementado, bem como a linguagem de programação utilizada. 2.2.1 - Fluxograma do processo O fluxograma (Anexo A) é a representação esquemática do processo funcional da “Posso Ajudar”, ou seja, representa a sequência das operações que ocorrem no processo. Primeiramente a inicialização do software é feita, depois o processo aguarda a leitura da distância feita pelo sensor, para comparar se a distância é maior/igual a um metro, se sim, a distância é convertida em frequência, proporcional à distância e vai para o motor de vibração (PWM) que o usuário terá a percepção do objeto, se a bengala ficar em inutilização ela calcula a distancia por cinco minutos e se não houve distancia diferente da inicial ela ficará em stand bye. 2.3 - Parte Mecânica
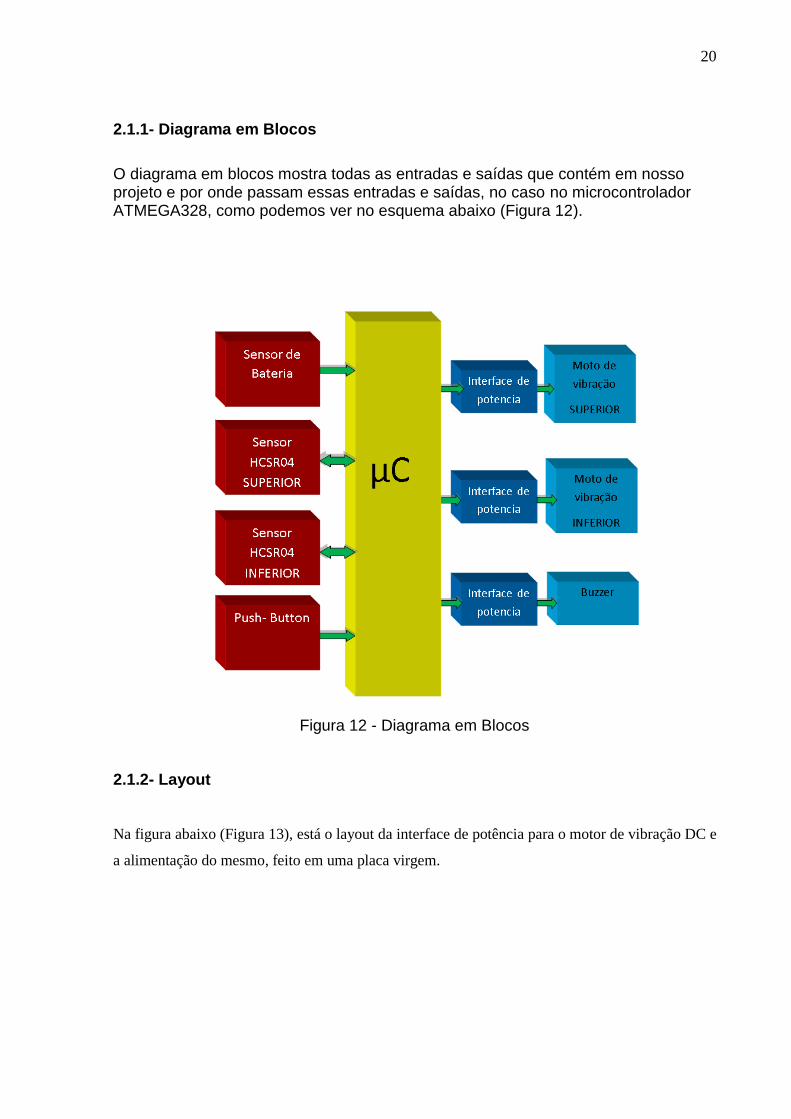
Neste capítulo nós procuramos mostrar para o leitor como as ideias iniciais do nosso projeto ficaria e o seu resultado final. A bengala para deficientes visuais foi comprada. A bengala é do tipo roller, onde se usa o método de rolar a sua ponteira no chão. Utilizamos a bengala roller porque vimos que ela oferece maior comodidade do tipo ponteira fixa, onde usa-se o método de bater no chão a ponteira, além de entendemos que rolar a bengala seria melhor do que bate-la no chão, já que estamos utilizando um sensor que é um dispositivo sensível. 2.3.1 – Croqui No croqui abaixo (Figura 15) é representada a nossa ideia inicial de como ficaria o produto final do nosso projeto. Com a Push- Botton embutida na bengala, e a fiação dentro da bengala.
22
Figura 15 - Croqui 2.6 - Problemas encontrados e soluções adotadas
Nós nos deparamos com diversos problemas, tanto no hardware como no software. A falta de comunicação do sensor com o microcontrolador, a rejeição da biblioteca no Arduino. Para tais problemas nos recorremos a ajuda do nosso orientador Salomão Choueri Junior, e o mesmo se dispôs a nos ajudar com a biblioteca e assim foi feito. E com isso houve a comunicação dos dois sensores e a percepção de obstáculos
3 - Desenvolvimento do Projeto
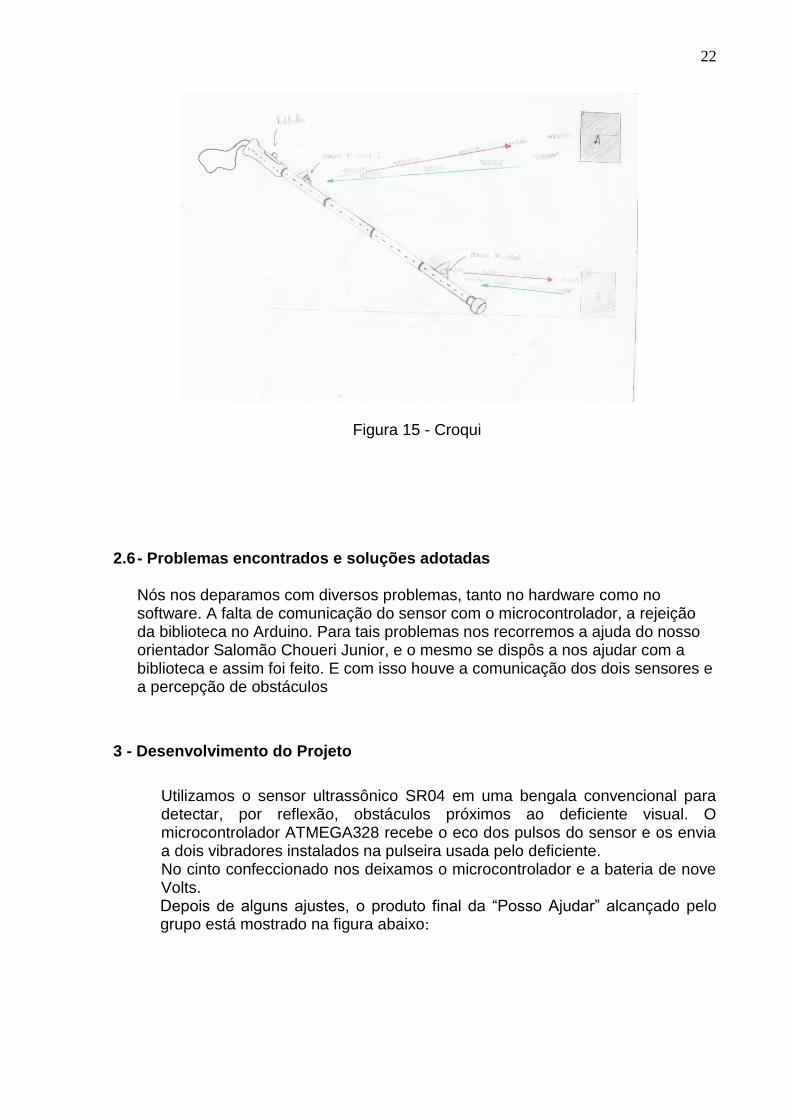
Utilizamos o sensor ultrassônico SR04 em uma bengala convencional para detectar, por reflexão, obstáculos próximos ao deficiente visual. O microcontrolador ATMEGA328 recebe o eco dos pulsos do sensor e os envia a dois vibradores instalados na pulseira usada pelo deficiente. No cinto confeccionado nos deixamos o microcontrolador e a bateria de nove Volts. Depois de alguns ajustes, o produto final da “Posso Ajudar” alcançado pelo grupo está mostrado na figura abaixo:
23
Figura 16 – Produto Pronto
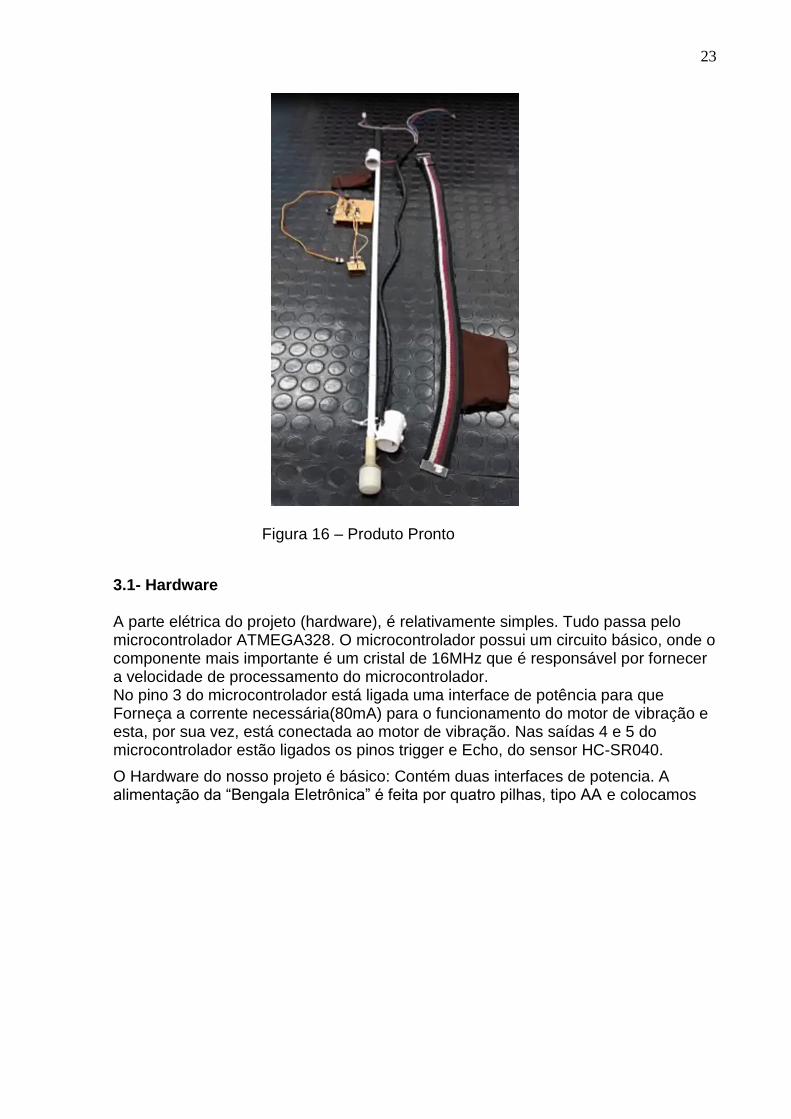
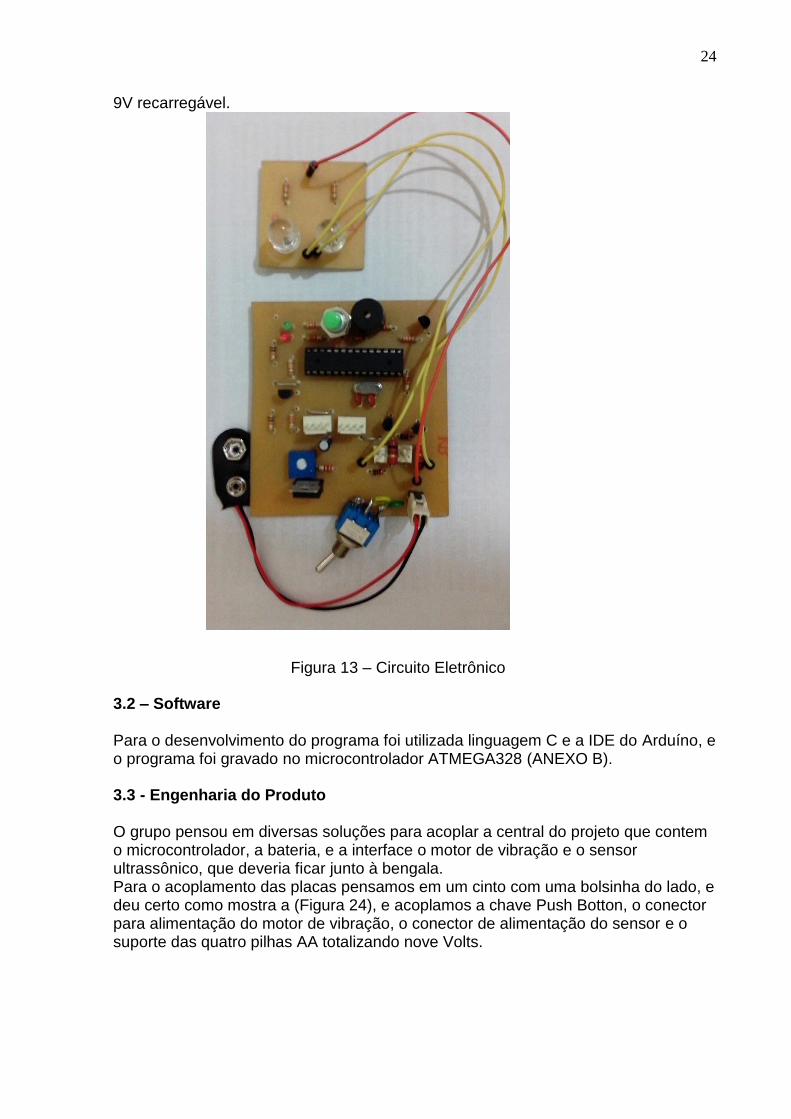
3.1- Hardware A parte elétrica do projeto (hardware), é relativamente simples. Tudo passa pelo microcontrolador ATMEGA328. O microcontrolador possui um circuito básico, onde o componente mais importante é um cristal de 16MHz que é responsável por fornecer a velocidade de processamento do microcontrolador. No pino 3 do microcontrolador está ligada uma interface de potência para que Forneça a corrente necessária(80mA) para o funcionamento do motor de vibração e esta, por sua vez, está conectada ao motor de vibração. Nas saídas 4 e 5 do microcontrolador estão ligados os pinos trigger e Echo, do sensor HC-SR040.
O Hardware do nosso projeto é básico: Contém duas interfaces de potencia. A alimentação da “Bengala Eletrônica” é feita por quatro pilhas, tipo AA e colocamos
24
9V recarregável.
Figura 13 – Circuito Eletrônico
3.2 – Software Para o desenvolvimento do programa foi utilizada linguagem C e a IDE do Arduíno, e o programa foi gravado no microcontrolador ATMEGA328 (ANEXO B).
3.3 - Engenharia do Produto O grupo pensou em diversas soluções para acoplar a central do projeto que contem o microcontrolador, a bateria, e a interface o motor de vibração e o sensor ultrassônico, que deveria ficar junto à bengala. Para o acoplamento das placas pensamos em um cinto com uma bolsinha do lado, e deu certo como mostra a (Figura 24), e acoplamos a chave Push Botton, o conector para alimentação do motor de vibração, o conector de alimentação do sensor e o suporte das quatro pilhas AA totalizando nove Volts.

25
Figura 16 – Cinto Adaptado
Para o deficiente visual perceber a vibração inversamente proporcional à distância do obstáculo e para não vibrar a bengala, optamos por colocar o motor de vibração em uma pulseira. A pulseira vibratória foi feita à partir de um tecido e costurada para fixar o motor de vibração, a pulseira final está representada na figura 00.
Figura 17 - Pulseira (suporte para motores)
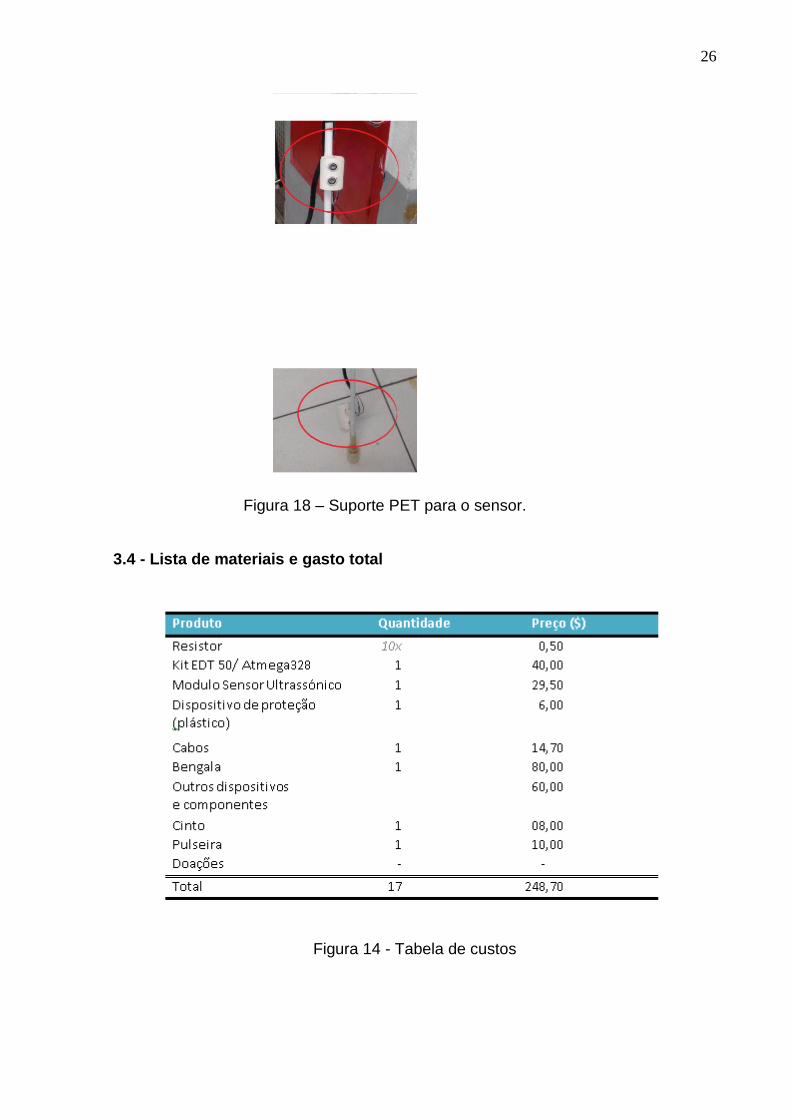
O sensor ultrassônico foi uma preocupação grande do grupo, para acopla-lo à bengala de um modo que ele ficasse protegido e em uma posição que sua gama efetiva não detectasse o chão como obstáculo, influenciando assim no funcionamento do projeto. A partir de pesquisas do funcionamento do sensor ultrassônico, vimos que o ângulo de 30º era a gama efetiva do nosso sensor então projetamos ele a 30º relativos à bengala. O suporte foi feito de garrafa PET com 30° de inclinação em relação à bengala, o encaixe do suporte com a bengala está foi rebitado para ficar muito bem fixado e para a proteção do sensor fizemos uma caixinha e prendemos com enforca gato, que fica na alça da mesma. O suporte final está mostrado nas figuras abaixo.
26
Figura 18 – Suporte PET para o sensor.
3.4 - Lista de materiais e gasto total
Figura 14 - Tabela de custos

27
4 – Conclusão
Concluir o projeto e chegar ao produto final não foi uma tarefa fácil tivemos algumas dificuldades para solucioná-los, mas conseguimos encontrar saídas e resolver esses problemas. O desenvolvimento da “Posso Ajudar” contribuiu imensamente para o desenvolvimento profissional de todos os componentes do grupo, aprendemos tecnologias novas que não aprenderíamos nas aulas normais do curso, como por exemplo, Arduíno e o sensor ultrassônico e no convívio do grupo durante o ano todo aprenderam a lidar com as dificuldades do dia-a-dia causadas pelo convívio em grupo. Os objetivos iniciais traçados pelo grupo foram alcançados, mas melhorias que o grupo vê como complementares no projeto existem, como por exemplo: deixar o sistema todo sem fio, comunicação via Wireless, localização e diminuir o custo.

28
Referências
CRUZ, Eduardo Cesar Alves; JUNIOR, Salomão Choueri. Eletrônica Aplicada. São Paulo:
Editora Érica, 2011.
http://pt.wikipedia.org/wiki/Microcontrolador
http://pt.wikipedia.org/wiki/Arduino
http://blog.filipeflop.com/sensores/sensor-ultrassonico-hc-sr04.html
https://www.youtube.com/watch?v=UAky03NowRA
http://blog.filipeflop.com/sensores/sensor-ultrassonico-hc-sr04.html
http://ebm.ufabc.edu.br/wp-content/uploads/2013/11/Aula-07_Ultrassonografia.pdf

29
Anexo A Fluxograma
2
3
POSSO AJUDAR
PushButton==0
3
LED VERMELHO ACENDE
DELAY 1s
DELAY 0,5s
Medição da distancia nos dois sensores
ultrassônicos HC SR04 pelo NewPing.
MOTORES EM NÍVEL ALTO
DELAY DE 5s
APAGA LED
VERMELHO
Acende o led verde
DELAY 0,5 s
MOTORES EM NÍVEL BAIXO
N
2
Converte valores em cm p/ pulsos PWM na
função Map.
Contador==
10
3
Escreve nos motores e saídas PWM
conforme os parâmetros da função Map.
Contador ++
Anterior =
=distancia1&Ant
erior2 = =
distancia 2.
Contador=0
Atualiza as variáveis “Anterior1
e Anterior2”
3
3
Acionament
o chave
Reset
S

30
Anexo B Programação

31

32

33
1.2 Pesquisa de Campo Perguntas para a pesquisa de campo Nome: Idade: Condição de visão: Cego de nascença – congênito – adquiriu? Você utiliza bengala? Fale a respeito do seu cotidiano: Qual a sua maior dificuldade nas ruas e espaços públicos? Qual a sua maior dificuldade em casa ao lhe dar com os afazeres de casa? Você prefere aparelhos sonoros, vidradores ou vidradores e sonoros? De que forma o nosso projeto te ajudaria?
Resultado:
Nome: Rosimeire
Idade: 35 anos
Condição de visão:
adquiriu a cegueira a pouco mais de cinco anos
Você utiliza bengala? Sim
Fale a respeito do seu cotidiano:
Ela não sai muito, vai para a fundação e lugares restritos.
Qual a sua maior dificuldade nas ruas e espaços públicos?
Buracos na calçada, dejetos de animais dentre outros como arvores e galhos.
Qual a sua maior dificuldade em casa ao lhe dar com os afazeres de casa?
Não tem, pois aprendeu a lhe dar com as situações na fundação.
Você prefere aparelhos sonoros, vidradores ou vidradores e sonoros?
Fones não, vibradores sim.
De que forma o nosso projeto te ajudaria?
Muito, pois me ajudaria a desviar dos obstáculos evitando assim acidentes.
Nome: Ivonete
Idade: 36 anos
Condição de visão: adquiriu a cegueira
Cego de nascença – congênito - adquiriu
Você utiliza bengala? Nunca usou bengala
Fale a respeito do seu cotidiano: Dona de casa, não costuma sair.
Qual a sua maior dificuldade nas ruas e espaços públicos? Calçadas, buracos,
camelos também atrapalham.
Qual a sua maior dificuldade em casa ao lhe dar com os afazeres de casa? Não tem
dificuldades, pois o curso na fundação a ajuda.
Você prefere aparelhos sonoros, vidradores ou vidradores e sonoros? O vibrador e só
o direito.
De que forma o nosso projeto te ajudaria? Ajudaria a lhe dar com os problemas já
citados.

34

35

36

37