cee 271: applied mechanics ii, dynamics lecture 21: ch.16 ... · cee 271: applied mechanics ii,...
TRANSCRIPT

CEE 271: Applied Mechanics II, Dynamics– Lecture 21: Ch.16, Sec.1–4 –
Prof. Albert S. Kim
Civil and Environmental Engineering, University of Hawaii at Manoa
Tuesday, October 30, 2012
1 / 40

PLANAR RIGID BODY MOTION: TRANSLATION andROTATION
Today’s objectives: Studentswill be able to
1 Analyze the kinematics ofa rigid body undergoingplanar translation orrotation about a fixed axis.
In-class activities:• Reading Quiz• Applications• Types of Rigid-Body
Motion• Planar Translation• Rotation About a Fixed
Axis• Concept Quiz• Group Problem Solving• Attention Quiz
2 / 40

READING QUIZ
1 If a rigid body is in translation only, the velocity at points Aand B on the rigid body .(a) are usually different(b) are always the same(c) depend on their position(d) depend on their relative position
ANS: (b)
2 If a rigid body is rotating with a constant angular velocity(ω) about a fixed axis, the velocity vector at point P (rp) is
.(a) ω × rp(b) rp × ω(c) drp/dt(d) All of the above.
ANS: (a)
3 / 40

APPLICATIONS
• Passengers on this amusement ride are subjected tocurvilinear translation since the vehicle moves in a circularpath but they always remains upright.
• If the angular motion of the rotating arms is known, howcan we determine the velocity and accelerationexperienced by the passengers? Why would we want toknow these values?
• Does each passenger feel the same acceleration?4 / 40
APPLICATIONS(continued)
• Gears, pulleys and cams, which rotateabout fixed axes, are often used inmachinery to generate motion andtransmit forces. The angular motion ofthese components must be understoodto properly design the system.
• To do this design, we need to relate the angular motions ofcontacting bodies that rotate about different fixed axes.How is this different than the analyses we did in earlierchapters?
5 / 40

RIGID BODY MOTION (Section 16.1)
• There are cases where an object cannot be treated as aparticle. In these cases the size or shape of the body mustbe considered. Rotation of the body about its center ofmass requires a different approach.
• For example, in the design of gears, cams, and links inmachinery or mechanisms, rotation of the body is animportant aspect in the analysis of motion.
• We will now start to study rigid body motion. The analysiswill be limited to planar motion.
• A body is said to undergo planar motion when all parts ofthe body move along paths equidistant from a fixed plane.
6 / 40

PLANAR RIGID BODY MOTION
• There are three types of planar rigid body motion.
7 / 40

PLANAR RIGID BODY MOTION (continued)
A. Translation: Translation occurs if every line segment on thebody remains parallel to its original direction during themotion. When all points move along straight lines, themotion is called rectilinear translation. When the paths ofmotion are curved lines, the motion is called curvilineartranslation.
8 / 40

PLANAR RIGID BODY MOTION (continued)
B. Rotation about a fixed axis: In this case,all the particles of the body, exceptthose on the axis of rotation, movealong circular paths in planesperpendicular to the axis of rotation.
C. General plane motion: In this case, thebody undergoes bothtranslation and rotation. Translationoccurs within a plane and rotationoccurs about an axis perpendicular tothis plane.
9 / 40
PLANAR RIGID BODY MOTION (continued)
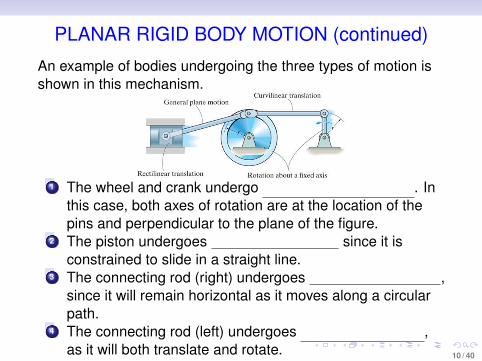
An example of bodies undergoing the three types of motion isshown in this mechanism.
1 The wheel and crank undergo rotation about a fixed axis. Inthis case, both axes of rotation are at the location of thepins and perpendicular to the plane of the figure.
2 The piston undergoes rectilinear translation since it isconstrained to slide in a straight line.
3 The connecting rod (right) undergoes curvilinear translation,since it will remain horizontal as it moves along a circularpath.
4 The connecting rod (left) undergoes general plane motion,as it will both translate and rotate. 10 / 40

RIGID-BODY MOTION: TRANSLATION (Section 16.2)
• The positions of two points A and Bon a translating body can be related by
rB = rA + rB/A
where rA and rB are the absoluteposition vectors defined from the fixedx− y coordinate system, and rB/A isthe relative-position vector between Band A. The velocity at B is
vB = vA +drB/A
dt• Now drB/A/dt = 0 since rB/A is constant.• So, vB = vA, and by following similar logic, aB = aA.• Note, all points in a rigid body subjected to translation
move with the same velocity and acceleration.11 / 40

RIGID-BODY MOTION: ROTATION ABOUT A FIXEDAXIS (Section 16.3)
• When a body rotates about a fixed axis, any pointP in the body travels along a circular path. Theangular position of P is defined by θ.
• The change in angular position, dθ, is called theangular displacement, with units of either radiansor revolutions: 1 revolution = (2π) radians
• Angular velocity, ω, is obtained by taking the timederivative of angular displacement:
ω =dθ
dt(rad/s)
• Similarly, angular acceleration is
α =d2θ
dt2=dω
dtor α = ω(
dω
dθ) rad/s2
12 / 40

RIGID-BODY MOTION: ROTATION ABOUT A FIXEDAXIS (continued)
• If the angular acceleration of the body isconstant, α = αC , the equations forangular velocity and acceleration canbe integrated to yield the set ofalgebraic equations below.
ω = ω0 + αCt (1)θ = θ0 + ω0t+
12αCt
2 (2)ω2 = ω2
0 + 2αC(θ − θ0) (3)
where θ0 and ω0 are the initial values ofthe body’s angular position and angularvelocity. Note these equations are verysimilar to the constant accelerationrelations developed for the rectilinearmotion of a particle.
13 / 40
RIGID-BODY ROTATION: VELOCITY OF POINT P
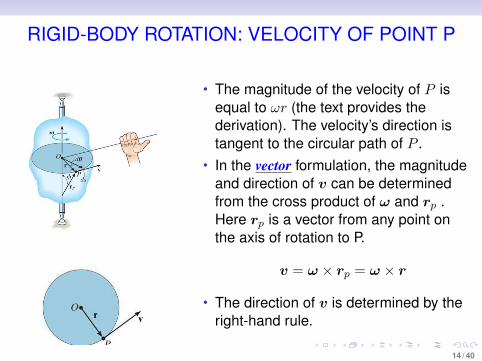
• The magnitude of the velocity of P isequal to ωr (the text provides thederivation). The velocity’s direction istangent to the circular path of P .
• In the vector formulation, the magnitudeand direction of v can be determinedfrom the cross product of ω and rp .Here rp is a vector from any point onthe axis of rotation to P.
v = ω × rp = ω × r
• The direction of v is determined by theright-hand rule.
14 / 40

RIGID-BODY ROTATION: ACCELERATION OFPOINT P
• The acceleration of P is expressed interms of its normal (an) and tangential(at) components. In scalar form, theseare at = αr and an = ω2r.
• The tangential component, at,represents the time rate of change inthe velocity’s magnitude. It is directedtangent to the path of motion.
• The normal component, an, representsthe time rate of change in the velocity’sdirection. It is directed toward the centerof the circular path.
15 / 40
RIGID-BODY ROTATION: ACCELERATION OFPOINT P (continued)
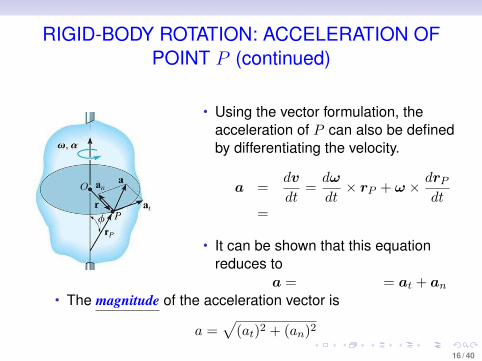
• Using the vector formulation, theacceleration of P can also be definedby differentiating the velocity.
a =dv
dt=dω
dt× rP + ω × drP
dt= α× rP + ω × (ω × rP )
• It can be shown that this equationreduces to
a = α× r − ω2r = at + an• The magnitude of the acceleration vector is
a =√(at)2 + (an)2
16 / 40

ROTATION ABOUT A FIXED AXIS: PROCEDURE
• Establish a sign convention along the axis of rotation.• If a relationship is known between any two of the variables
(α, ω, θ, or t), the other variables can be determined fromthe equations:
ω =dθ
dt, α =
dω
dt, αdθ = ωdω
• If α is constant, use the equations for constant angularacceleration.
• To determine the motion of a point, the scalar equationsv = ωr, at = αr, an = ω2r , and a =
√(at)2 + (an)2
can be used.• Alternatively, the vector form of the equations can be used
(with i, j,k components).
v = ω × rP = ω × ra = at + an = α× rP + ω × (ω × rP ) = α× r − w2r
17 / 40

EXAMPLE
• Given: The motor gives the blade an angularacceleration α = 20e−0.6trad/s2, where t is inseconds. The initial conditions are that whent = 0, the blade is at rest.
• Find: The velocity and acceleration of the tip P of one ofthe blades when t = 3 sec. How many revolutions has theblade turned in 3 sec?
• Plan:1 Determine the angular velocity and displacement of the
blade using kinematics of angular motion.2 The magnitudes of the velocity and acceleration of point P
can be determined from the scalar equations of motion for apoint on a rotating body. Why scalar?
18 / 40

EXAMPLE (Solution)
1. Since the angular acceleration is given as a function of time,α = 20e−0.6t rad/s2 , the angular velocity and displacementcan be found by integration.
ω = ω0 +
∫αdt = 0 +
∫ (20e−0.6t
)dt =
20
−0.6e−0.6t (4)
when t = 3 sec, ω = −5.510 rad/sAngular displacement
θ = θ0 + ω0t+
∫ωdt (5)
= 0 + 0 +20
−0.6
∫e−0.6tdt =
20
(−0.6)2e−0.6t
when t = 3 sec, θ = 9.183 rad = 1.46 rev
Also , when t = 3 sec, α = 20e−0.6(3) = 3.306 rad/s2
19 / 40

EXAMPLE (continued)
2. The velocity of point P on the the fan, at a radius of 1.75 ft,is determined as
vP = ωr = (5.510)(1.75) = 9.64 ft/s
The normal and tangential components of acceleration ofpoint P are calculated as
an = ω2r = (5.510)2(1.75) = 53.13 ft/s2
at = αr = (3.306)(1.75) = 5.786 ft/s2
The magnitude of the acceleration of P is determined by
aP =√(an)2 + (at)2 =
√(53.13)2 + (5.786)2
= 53.4 ft/s2
20 / 40

CONCEPT QUIZ
1. A disk is rotating at 4 rad/s. If it is subjected to a constantangular acceleration of 2 rad/s2, determine theacceleration at B.
(a) (+4i+ 32j) ft/s2
(b) (+4i− 32j) ft/s2
(c) (−4i+ 32j) ft/s2
(d) (−4i− 32j) ft/s2
B
2 ft
A
y
xO
2 rad/s2
ANS: (c)
21 / 40

CONCEPT QUIZ (continued)
2. A Frisbee is thrown and curves to the right. It isexperiencing(a) rectilinear translation.(b) curvilinear translation.(c) pure rotation.(d) general plane motion.
ANS: (d)
22 / 40

GROUP PROBLEM SOLVING
• Given: Starting from rest when gear A isgiven a constant angular acceleration,αA = 4.5 rad/s2. The cord is wrappedaround pulley D which is rigidly attached togear B.
• Find: he velocity of cylinder C and thedistance it travels in 3 seconds.
• Plan:1 The angular acceleration of gear B (and pulley D) can be
related to αA.2 The acceleration of cylinder C can be determined by using
the equations for motion of a point on a rotating body since(at)D at point P is the same as ac.
3 The velocity and distance of C can be found by using theconstant acceleration equations. 23 / 40

GROUP PROBLEM SOLVING (Solution)
1. Gear A and B will have the samespeed and tangential component ofacceleration at the point wherethey mesh. Thus,
at = αArA = αBrB (6)(4.5)(75) = αB(225) (7)
αB = 1.5rad/s2 (8)
Since gear B and pulley D turntogether, αD = αB = 1.5 rad/s2
24 / 40

GROUP PROBLEM SOLVING(continued)
2. Assuming the cord attached to pulley D is inextensible anddoes not slip, the velocity and acceleration of cylinder Cwill be the same as the velocity and tangential componentof acceleration along the pulley D:
aC = (at)D = αDrD = (1.5)(0.125) = 0.1875m/s2
3. Since αA is constant, αD and αC will be constant. Theconstant acceleration equation for rectilinear motion can beused to determine the velocity and displacement ofcylinder C when t = 3 s (s0 = v0 = 0):
vc = v0 + aCt = 0 + 0.1875(3) = 0.563m/s ↑ (9)sc = s0 + v0t+ (0.5)aCt
2
= 0 + 0 + (0.5)0.1875(3)2 = 0.844meter (10)
25 / 40

ATTENTION QUIZ
1 The fan blades suddenly experience anangular acceleration of 2 rad/s2. If theblades are rotating with an initial angularvelocity of 4 rad/s, determine the speedof point P when the blades have turned 2revolutions (when ω = 8.14 rad/s).
(a) 14.2 ft/s(b) 17.7 ft/s
(c) 23.1 ft/s(d) 26.7 ft/s
ANS: (a)2 Determine the magnitude of the acceleration at P when
the blades have turned the 2 revolutions.(a) 0 ft/s2
(b) 3.5 ft/s2(c) 115.95 ft/s2
(d) 116 ft/s 2
ANS: (d)26 / 40

ABSOLUTE MOTION ANALYSIS
Today’s objectives: Studentswill be able to
1 Determine the velocity andacceleration of a rigid bodyundergoing general planemotion using anabsolute motion analysis.
In-class activities:• Reading Quiz• Applications• General Plane Motion• Concept Quiz• Group Problem Solving• Attention Quiz
27 / 40

READING QUIZ
1 A body subjected to general plane motion undergoes a/an(a) translation.(b) rotation.(c) simultaneous translation and rotation.(d) out-of-plane movement.
ANS: (c)
2 In general plane motion, if the rigid body is represented bya slab, the slab rotates(a) about an axis perpendicular to the plane.(b) about an axis parallel to the plane.(c) about an axis lying in the plane.(d) None of the above.
ANS: (a)
28 / 40

APPLICATIONS
• The dumping bin on the truck rotatesabout a fixed axis passing through thepin at A. It is operated by the extensionof the hydraulic cylinder BC.
• The angular position of the bin can bespecified using the angular positioncoordinate θ, and the position of point Con the bin is specified using thecoordinate s.
• As a part of the design process for the truck, an engineerhad to relate the translational velocity at which the hydrauliccylinder extends and the resulting angular velocity of thebin.
29 / 40

APPLICATIONS(continued)
• The large window is opened using ahydraulic cylinder AB.
• The position B of the hydraulic cylinderrod is related to the angular position, θ,of the window.
• A designer has to relate thetranslational velocity at B of thehydraulic cylinder and the angularvelocity and acceleration of the window.How would you go about the task?
30 / 40

APPLICATIONS(continued)
• The position of the piston, x, can be defined as a functionof the angular position of the crank, θ. By differentiating xwith respect to time, the velocity of the piston can berelated to the angular velocity, ω, of the crank. This isnecessary when designing an engine.
• The stroke of the piston is defined as the total distancemoved by the piston as the crank angle varies from 0 to180◦. How does the length of crank AB affect the stroke?
31 / 40

ABSOLUTE MOTION ANALYSIS (Section 16.4)
• The figure below shows the window using a hydrauliccylinder AB.
• The absolute motion analysis method relatesthe position of a point, B, on a rigid bodyundergoing rectilinear motion to the angularposition, θ, of a line contained in the body.
• Once a relationship in the form of sB = f(θ)is established, the velocity and accelerationof point B are obtained in terms of theangular velocity and angular acceleration ofthe rigid body by taking the first andsecond time-derivatives of the positionfunction.
• Usually the chain rule must be used when taking thederivatives of the position coordinate equation.
32 / 40

EXAMPLE I
• Given: The platform P isconstrained to move vertically bythe smooth vertical guides. Thecam C rotates with a constantangular velocity, ω.
• Find: The velocity andacceleration of platform P as afunction of the angle θ of cam C.
• Plan : Use the fixed reference point O and define theposition of the platform, P , in terms of the parameter θ.Take successive time derivatives of the position equation tofind the velocity and acceleration.
33 / 40

EXAMPLE I(continued)
• Solution:
• By geometry, y = r + r sin θ
• By differentiating with respect to time,vP = r cos θ(θ̇) = rω cos θ
• Note that the cam rotates with aconstant angular velocity, ω.
• Differentiating vP to find the acceleration,
aP =d(rω cos θ)
dt= rω(− sin θ)(ω) = −rω2 sin θ
34 / 40
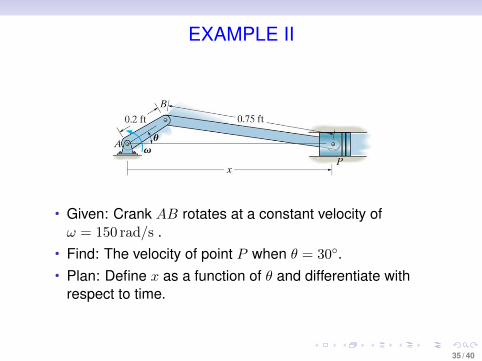
EXAMPLE II
• Given: Crank AB rotates at a constant velocity ofω = 150 rad/s .
• Find: The velocity of point P when θ = 30◦.• Plan: Define x as a function of θ and differentiate with
respect to time.
35 / 40

EXAMPLE II(continued)
• Solution:
xP = 0.2 cos θ +√(0.75)2 − (0.2 sin θ)2 (11)
vP = −0.2ω sin θ + (0.5)[(0.75)2 − (0.2 sin θ)2]−0.5
×(−2)(0.2 sin θ)(0.2 cos θ)ω
= −0.2ω sin θ − [0.5(0.2)2 sin 2θω]√(0.75)2 − (0.2 sin θ)2
(12)
• At θ = 30◦, ω = 150 rad/s and
vP = −18.5 ft/s36 / 40

CHECK YOUR UNDERSTANDING QUIZ
1 The position, s, is given as a function of angular position, θ,as s = 10 sin 2θ . The velocity, v, is(a) 20 cos 2θ(b) 20 sin 2θ(c) 20ω cos 2θ(d) 20ω sin 2θ
ANS: (c)
2 If s = 10 sin 2θ, the acceleration, a, is(a) 20α sin 2θ(b) 20α cos 2θ − 40ω2 sin 2θ(c) 20α cos 2θ(d) −40α sin 2θ
ANS: (b)
37 / 40

GROUP PROBLEM SOLVING
• Given: The circular cam isrotating about the fixed point Owith ω = 4 rad/s, α = 2 rad/s2
with the dimensions shown.• Find: The velocity and
acceleration of the plate whenθ = 30◦.
• Plan: Set the coordinate x to be the distance between Oand the plate. Relate x to the angular position, θ. Thentake time derivatives of the position to find the velocity andacceleration.
38 / 40

GROUP PROBLEM SOLVING (continued)
• Solution:
• Relate x, the distance between O andthe plate, to θ.
x = 120 sin θ + 150(mm)
• Take time derivatives of the position tofind the velocity and acceleration.
• vC = dx/dt = 120 cos θ(θ̇) = 120ω cos θ(mm/s)aC = dvC/dt = 120α cos θ + 120ω(− sin θ)(ω)(mm/s2)
• When θ = 30◦, ω = 4 rad/s, and α = 2rad/s2. Substituting,vC = 120(4) cos 30◦ = 416mm/s(→)aC = 120(2) cos 30◦ + 120(42)(− sin 30◦) = −752 mm/s2(←)
39 / 40

ATTENTION QUIZ
1 The sliders shown below are confined to move in thehorizontal and vertical slots. If vA = 10m/s, determine theconnecting bar’s angular velocity when θ = 30◦.
(a) 10rad/s"
(b) 10rad/s!
(c) 8.7rad/s!
(d) 8.7rad/s"
ANS: (a)
40 / 40