capítulo v: manipuladores -...
TRANSCRIPT

Capítulo V: Manipuladores
5.1 Manipulador de secuencia: B+ C- B- A+ B+ C+ TON1 B- A-Construya el circuito de control electro-neumático mediante el método Paso a Paso Ladder
Figura 5.1.1
Figura 5.1.2 42
m1-1IC1
IN0IN1IN2IN3IN4IN5IN6IN7
COM
1-1OC1OUT0OUT1OUT2OUT3OUT4OUT5OUT6OUT7
COM
1-1OC2OUT0OUT1OUT2OUT3OUT4OUT5OUT6OUT7
COM
problema 1:MANIPULADOR
a0a1
ao
bo
b1
a1
aoa1coc1
b0b1
bo b1
c0c1
co c1
END
RUNG1
1-1OC1.OUT0 m
1-1OC1.OUT0
bo c1 ao 1-1OC1.OUT0
b1 1-1OC1.OUT0
1-1OC1.OUT1
1-1OC1.OUT1
co 1-1OC1.OUT1
1-1OC1.OUT2
1-1OC1.OUT2
bo 1-1OC1.OUT2
1-1OC1.OUT3
1-1OC1.OUT3
a1 1-1OC1.OUT3
1-1OC1.OUT4
1-1OC1.OUT4
b1 1-1OC1.OUT4
1-1OC1.OUT5
1-1OC1.OUT5
c1 1-1OC1.OUT5
1-1OC1.OUT6
1-1OC1.OUT6
TON1.TT 1-1OC1.OUT6
1-1OC1.OUT7
1-1OC1.OUT7
1-1OC3OUT0OUT1OUT2OUT3OUT4OUT5OUT6OUT7
COM
bo 1-1OC1.OUT7
1-1OC3.OUT0
1-1OC3.OUT0
ao 1-1OC3.OUT0 1-1OC3.OUT1
1-1OC3.OUT1
1-1OC1.OUT6
TONTimer ON-DelayTimer T2:1Time BasePresetAccum
1s 10 0
END
RUNG2
1-1OC1.OUT0 1-1OC1.OUT1 1-1OC2.OUT2
b1
1-1OC1.OUT51-1OC1.OUT4
1-1OC1.OUT21-1OC1.OUT11-1OC2.OUT5
1-1OC1.OUT2 1-1OC1.OUT3 1-1OC2.OUT3
1-1OC3.OUT01-1OC1.OUT7
b0c1c0
1-1OC1.OUT41-1OC1.OUT3 1-1OC2.OUT0
a0a1
1-1OC1.OUT61-1OC1.OUT5 1-1OC2.OUT4
1-1OC3.OUT11-1OC3.OUT0 1-1OC2.OUT1
CIRCUITO DE FUERZACIRCUITO DE CONTROL

5.2 Brazo transportadorEn la figura adjunta. Se utilizan 3 cilindros neumáticos, uno para el transporte, otro para
el giro, y otro para la alimentación. El brazo transportador toma una pieza del almacéndespués de cada ciclo de la máquina, retrocede, gira orientándolo hacia arriba y acto seguidointroduce la pieza a trabajar en la mordaza de sujeción.La secuencia del ciclo es: A- B- C- B+ A+ B- C+ B+Construya el circuito de control electro-neumático mediante el método Paso a Paso Ladder.
Figura 5.2.1
Figura 5.2.2 43
a0 b1a1 b0
c0 c1
A+A-
C+C-
END
RUNG1
END
RUNG2
"P1" "m" "a1" "b1" "c1" "P9"( )"P1"
"P1"
m
"P1" "P2"( )"A-"
"a0"( )"P2"
"P2"
"P1"
"P2" "P3"( )"B-"
"b0"( )"P3"
"P3"
"P2"
"c0"( )"P4"
"P4"
"P3"
"b1"( )"P5"
"P5"
"P4"
"P3" "P4"( )"C-"
"P4" "P5"( )"B+"
"P5" "P6"( )"A+"
"a1"( )"P6"
"P6"
"P5"
"b01"( )"P7"
"P7"
"P6"
"c1"( )"P8"
"P8"
"P7"
"b11"( )"P9""P8"
B+B-
"P6" "P7"
b01 b11
"P7" "P8"( )"C+"
"P8" "P9"

5.3 Estación de trabajo de 8 estaciones
El circuito mostrado en la figura adjunta, es una estación de trabajo donde el cuadrotiene las funciones siguientes:
Plato divisor. Entrega intermitente de piezas Estación 1: Entrega, posición y sujetar Estación 2 hasta 7: Mecanizado de la pieza Estación 8: Expulsión de la pieza
Un plato divisor permite ejecutar diversos procesos de trabajo secuenciales. La operaciónde entrega debidamente regulada se efectúa una sola vez, y la expulsión, se puede serregulada o sin regular, también sólo se realiza una vez, independientemente de la cantidadde estaciones de mecanizado instaladas en el plato divisor.
Los platos divisores se prestan para efectuar trabajos de giro intermitente en equiposautomáticos de montaje, embalaje y taladrado.
Se desea que construya el circuito de control electro-neumático empleando el método depaso a paso “LADDER”
Utilice electro-válvulas 4 / 2 posiciones de una solenoide con retorno por resorte.
Figura 5.3.1
44

Figura 5.3.2
45
A0 B1
m
a0 a1
"P1"( )"A0"
B2 B3
B4 B5 B6 B7
1_0 1_1 2_0 2_1 3_0 3_1
4_0 4_1 5_0 5_1 6_0 6_1 7_0 7_1
"P3"
"P2"( )"B1""P23"
END
RUNG2
E
"P5"( )"B2""P6"
"P8"( )"B3""P9"
"P11"( )"B4""P12"
"P14"( )"B5""P15"
"P17"( )"B6""P18"
"P20"( )"B7""P21"
TMS1
m: Pulsador de STA RT
S1: Simula el sensor de posicion S de la piez apara el arranque dle proceso con el cilindro A.Se modela como un Toggle Switch ya que elsensor no permanece un intante prendido, sinoun corto intervalo de tiempo. En el caso real seusaria un sensor.
E: Sensor de expulsion de pieza. Como estesneor esta al final basta modelarlo como unpulsador para el Automation Studio. En el casoreal, se usarian sensores.
TM: Sensor Termico de la Maquina. Cuando sellega a un punto elevado estelleg a un picomandando en pulso (razon de usar un pulsador) yel sistema se detiene al terminar el paso en elque estaba.
Control del Plato Divisor Sistema Electro-Hidraulico
S1 DEBE ESTAR CERRADO PARA QUE FUNCIONE

Figura 5.3.3 46
( )"P1""P1"
"P1"
"P25""m" "a0"
( )"P2""a1" "P1"
"TM""1_0" "2_0" "3_0" "4_0" "5_0" "6_0" "7_0"
"P2"
"1_1"
"P3"
( )"P3""P2"
"a0"
"P4"
"P3"( )"P4"
"P4" "P5"
"P7" "P8"
"P10" "P11"
"P13" "P14"
"P16" "P17"
"P19" "P20"
"P22" "P23"
"P24"
S_ODTS
TV
R
Q
BI
BCD
"TON1"
S5T#3S ""0""0
END
RUNG1
"TON1"
"P5"
"P4"( )"P5"
"2_1"
"P6"
"P5"
( )"P6"
"2_0"
"P7"
"P6"( )"P7"
"TON1"
"P8"
"P7"( )"P8"
"3_1"
"P9"
"P8"
( )"P9"
"3_0"
"P10"
"P9"( )
"P10"
END
RUNG3
"TON1"
"P11"
"P10"( )
"P11"
"4_1"
"P12"
"P11"( )
"P12"
"4_0"
"P13"
"P12"( )
"P13"
"TON1"
"P14"
"P13"( )
"P14"
"5_1"
"P15"
"P14"( )
"P15"
"5_0"
"P16"
"P15"( )
"P16"
"TON1"
"P17"
"P16"( )
"P17"
"6_1"
"P18"
"P17"( )
"P18"
"6_0"
"P19"
"P18"( )
"P19"
"TON1"
"P20"
"P19"( )
"P20"
"7_1"
"P21"
"P20"( )
"P21"
"7_0"
"P22"
"P21"( )
"P22"
"TON1"
"P23"
"P22"( )
"P23"
"P24"
"P23"( )
"P24""E"
"TON1" "P24"( )
"P25"
"S1"

5.4 Manipulador polar central con dos ejes (brazos) horizontales situados a 90ºUn manipulador polar. Se trata de una célula de mecanizado sobre una pieza en forma de
disco. El conjunto esta formado por el manipulador polar central con dos ejes (brazos)horizontales situados a 90º de tal manera que cada uno de cubre un sector.Brazo 1. Mediante una pinza neumática adaptada recoge la pieza de un dispensadorvibratorio. Elevación de la pieza para sacarla de su posición y giro sobre eje polar hasta lamáquina – herramienta. Durante este giro, la muñeca efectúa, así mismo, un giro de 90º y lapieza queda situada en posición horizontal.Brazo 2. Mediante una pinza neumática recoge la pieza terminada de la máquina –herramienta. Elevación de la pieza para la extracción del utillaje y giro sobre el eje polarsituarse sobre la canaleta de salida.
Los movimientos de los brazos se efectúan de manera síncrona al estar unidos por unvertical común.
Los mandos de los ejes de manipulación, en este caso, son neumáticos con regulaciónmecánica de recorridos y con amortiguación final de carrera
Los componentes de este manipulador.1. Manipulador polar compuesto por:- Plato giratorio con amortiguadores hidráulicos fin de carrera.- Elevador – descensor de brazos. - Brazos lineales (2)- Muñeca (90º) - Pinzas (2)2. Jaula o barrera física para protección3. Base soporte de conjunto.4. Dispensador vibratorio de piezas5. Máquina principal.6. Canal de salidas de piezas acabadas.7. Tolva cargadora de dispensador vibratorio.Los ejes de movimiento son: giro de conjunto, elevación – descenso, avance – retroceso debrazos, giro de muñeca y pinzas.Construir, el circuito electro-neumático mediante la programación paso a paso.
Figura 5.4.1 47

Figura 5.4.248
B-B+A-A+
E-E+
I0 I1 D1
g01 g1 g02 g2 g03 g3
a0 a1 b0 b1
e0 e1m
BRAZOS LINEALES
GIROS
PINZAS DE BRAZOS
ELEVACION Y DESCENSODEL BRAZO ROBOTICO
START
D2
G1-G1+ G2-G2+G3-G3+
I-I+ D-D+
MANIPULADOR POLAR (BRAZO ROBOTICO)
brazo izquierdo brazo derecho
conjunto (90º) muñeca izquierda(90º) muñeca derecha(90º)
pinza brazo izquierdo pinza brazo derecho
elevar descender
I+ A+ E+ G1+ E- A- E+ G1- E- I- STOPD+ B+ G2+ B- G2- D- G3+ G3-
SECUENCIA

Figura 5.4.349
END
RUNG2
END
RUNG1
"I0" "D2" "g01" "g02" "g03"
"P1"
"P11"( )"P1""m""P1" "a0" "b0" "e0"
"I1" "D1"
"P2"
"a1" "b1"
"P3"
"e1"
"P4"
"g1" "g2" "g3"
"P5"
"e0"
"P6"
"a0" "b0"
"P7"
"e1"
"P8"
"g01" "g02" "g03"
"P9"
"e0"
"P10"
"I0" "D2"
"P1"
"P2"
"P3"
"P7"
"P4"
"P5"
"P9"
"P6"
"P8"
"P10"
( )"I+"
( )"D+"
( )"A+"
( )"B+"
( )"E+"
( )"G1+"
( )"G2+"
( )"G3+"
( )"E-"
( )"A-"
"P2"
"P3"
"P4"
"P8"
"P5"
"P6"
"P10"
"P7"
( )"B-"
( )"G1-"
( )"G2-"
( )"G3-"
( )"I-"
( )"D-"
"P9"
"P1"
"P2"
"P3"
"P4"
( )"P2"
( )"P3"
( )"P4"
( )"P5"
( )"P6"
( )"P7"
( )"P8"
"P5"
"P6"
"P7"
"P8"
"P9"
( )"P9"
( )"P10"
( )"P11""P10"
AREA DE CONTROL AREA DEACTIVACION

5.5 Manipulador polar de Bidones
La figura adjunta ilustra un manipulador polar. En la vista de planta se puede observar urecipiente cilíndrico vacío que llega por transportador, procedente de una operación delavado interno y debe manipular hasta el transportador de salida después de giro de 180º,para ser colocado con la boca hacia arriba antes de ser conducido a una máquina llenadorade un determinado producto. El manipulador describe varios ejes de movimientos. Girosobre eje vertical (cuerpo)
Avance – retroceso del eje horizontal (brazo)
- Elevación del conjunto para elevar los recipientes y permitir el giro de 180º mediantea. Muñeca giratoriab. Cierre para fijación del recipiente (manos)c. Pinza de aperturad. Prolongadores antideslizantes de fijación (dedos)
Con esta composición la orden de movimientos para hacer la manipulación de losrecipientes puede ser: Electroválvulas: 5/2 Cilindros
- Giro a izquierda G-- Avance del Brazo B+- Cierre de Pinza sobre el bidón P+- Elevación del Conjunto C+- Retroceso del Brazo B-- Giro a derecha y giro de Muñeca 180º(simultaneo) G+ , M+- Avance del Brazo B+- Descenso del Conjunto C-- Abrir Pinza y salida del bidón por arrastre de cinta P-- Retroceso del Brazo B-- Giro a la izquierda de Muñeca la M-
Se desea que construya el circuito electro-neumático mediante la programación ladder.
Considere las siguientes entradas:. pulsador marcha (m). finales de carrera de Giro de base (g0, g1). Brazo (b0, b1); Pinza (p0, p1). Conjunto (c0, c1). Muñeca (m0, m1)
Vista simplificada de un manipulador polar en operación de traspaso de bidones deun transportador a otro con vuelco combinado de 180º
1. Muñeca de 180º2. Transportador de saluda3. Transportador de llegada4. Manipulador de tres ejes de movimientos: Giro, elevación, cambio de alcance5. Pinzas de fijación.
50

Vista simplificada del manipulador polar
Figura 5.5.1Desarrollo: Circuito de Fuerza:
Figura 5.5.251
1-1IC1IN0IN1IN2IN3IN4IN5IN6IN7IN8IN9IN10IN11IN12IN13IN14IN15
COM
1-1OC1OUT0OUT1OUT2OUT3OUT4OUT5OUT6OUT7OUT8OUT9OUT10OUT11OUT12OUT13OUT14OUT15
COM
G-G+ B-B+
P-P+ C-C+ M-M+
G-
B+P+C+B-G+M+C-
P-
M-
g0 g1 b0 b1
p0 p1c0 c1 m0 m1
m
STOP
g0g1b0b1p0p1c0c1m0m1
m.g1.b0.p0.c0.mo
G-P1
g0 b1 p1 c1 b0 g1.m1 b1 c0 p0 b0 m0
B+P2
P+P3
C+P4
B-P5
G+M+P6
B+P7
C-P8
P-P9
B-P10 M-
P11 STOP
P12
MANIPULADOR POLAR DE BIDONES
Esquema del PLCCircuito de Fuerza

Figura 5.5.3 52
1-1IC1IN0IN1IN2IN3IN4IN5IN6IN7IN8IN9IN10IN11IN12IN13IN14IN15
COM
1-1OC1OUT0OUT1OUT2OUT3OUT4OUT5OUT6OUT7OUT8OUT9OUT10OUT11OUT12OUT13OUT14OUT15
COM
G-G+ B-B+ P-P+
C-C+ M-M+
G-
B+P+C+B-G+M+C-
P-
M-
g0 g1 b0 b1 p0 p1
c0 c1 m0 m1
m
STOP
g0g1b0b1p0p1c0c1m0m1
END
RUNG1
P1 1-1IC1.IN1
1-1IC1.IN4
1-1IC1.IN5
1-1IC1.IN7
1-1IC1.IN91-1IC1.IN11
P1
P1 1-1IC1.IN2
END
RUNG2
P1 1-1OC1.OUT1P2
1-1IC1.IN3 P1 P2 P2 P3 1-1OC1.OUT2
P2
1-1IC1.IN6 P3P2
P3
P3 P4 1-1OC1.OUT3
1-1IC1.IN8 P4P3
P4
P4 P5 1-1OC1.OUT4
1-1IC1.IN10 P4 P5
P5
P5 P6 1-1OC1.OUT5
1-1IC1.IN5 P5 P6
P6
P6 P7 1-1OC1.OUT6
1-1IC1.IN4 1-1IC1.IN12 P6 P7
P7
P6 P11 1-1OC1.OUT7
P7 P8
1-1IC1.IN6 P7 P8
P8
P8 P9 1-1OC1.OUT8
1-1IC1.IN9 P8 P9
P9
P9 P10 1-1OC1.OUT9
1-1IC1.IN7 P10P9
P10
P10 P11
1-1IC1.IN5 P10 P11
P11
P11 1-1OC1.OUT10
P12
1-1IC1.IN11P12P11
m.g1.b0.p0.c0.mo
G-P1
g0 b1 p1 c1 b0 g1.m1 b1 c0 p0 b0 m0
B+P2
P+P3
C+P4
B-P5
G+M+P6
B+P7
C-P8
P-P9
B-P10 M-
P11 STOP
P12
MANIPULADOR POLAR DE BIDONES
AREA DE CONTROL AREA DE ACTIVACION
Esquemadel PLC

5.6 Forma básica de un robotLa figura adjunta ilustra la forma básica de un robot que levanta y deposita objetos.El robot tiene tres ejes de movimiento: rotación, tanto para en el sentido de las
manecillas del reloj como en sentido contrario, alrededor de su base; para la extensión o lacontracción del brazo y para subirlo y bajarlo. El mecanismo de sujeción o pinza se abre yse cierra. Estos movimientos se reproducen con cilindros neumáticos accionados porválvulas solenoide e interruptores limitadores (fines de carrera) para indicar sumovimiento.
Se desea que construya el circuito de control electroneumatico empleando el métodoLadder, para el siguiente movimiento accionando el pulsador de marcha (m), Extensióndel embolo (E+). Sujeción de pieza (S+), retracción del embolo (E-), Ascender el cilindro(A+), Soltar la pieza (S-), retracción del embolo (E-), Rotación en sentido contrario de lasmanecillas del reloj (R-), Bajar el cilindro (A-).
Considere las siguientes entradas: pulsador de marcha (m) y finales de carrera: rotaciónde base (r0, r1); extensión del brazo (e0, e1); Ascenso del brazo (a0, a1); Sujeción depieza (s0, s1 ampliación de entrada).
Figura 5.6.1Solución: Circuito de Fuerza
Figura 5.6.2 53
END
RUNG1
"P1"( )"P1"
"P1"
END
RUNG2
"P1" "P2"
"1-1IC2.IN1"
( )"P2"
"P2"
"P2"( )
"1-1OC1.OUT1"
a0 a1 s0 s1
"1-1IC2.IN2"
"P3"
"P3"
"P1"
"P2"( )"P3"
"1-1IC2.IN3"
"P4"
"P3"( )"P4"
"1-1IC2.IN4"
"P5"
"P4"( )"P5"
"1-1IC2.IN5"
"P6"
"P5"
"1-1IC2.IN6"
"P7"
"P6"
( )"P6"
( )"P7"
"P3"( )
"1-1OC1.OUT2""P4"
"P4"( )
"1-1OC1.OUT3""P5"
"P5"( )
"1-1OC1.OUT4""P6"
"P6" "P7"
"P7"( )
"1-1OC1.OUT5""P8"
"P8" "P9"
"P9"( )
"1-1OC1.OUT6""P10"
"P10"( )
"1-1OC1.OUT7""P11"
( )
"1-1OC1.OUT0"
Marcha
RR-RR+
r0 r1 e0 e1
EE-EE+
1-1OC1
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
COM
EE+
SS+
EE-
AA+
SS-SS+AA-AA+
1-1IC2
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
m
"1-1IC2.IN0"
e1
s1
e0
a1
r1
e1
s0
e0
r0
a0
"1-1IC2.IN7"
"P8"
"P7"( )"P8"
"1-1IC2.IN8"
"P9"
"P8"( )"P9"
"1-1IC2.IN9"
"P10"
"P9"( )
"P10"
"1-1IC2.IN10"
"P11"
"P10"( )
"P11"
RR+
SS-
RR-
AA-
"P11"( )
"P12"
"P12"
( )"P13"
"P13"
"P13"
"1-1IC2.IN11"
"P13"
"P13"
"P13"
"P13"
"P13"
"P13"
Parada
Parada
"P13"
"P13"
( )"P14"
"1-1IC2.IN12"
"P14"
Stop_Parada
Stop_Parada
"P14"
"P1"
E+ S+ E- A+ R+ E+ R- A-S- E-
R
E
A
S
Si se quiere hacer una nueva secuenciadespues de pulsar el boton de parada sedebe pulsa Stop_Parada para que el botonMarcha quede habilitado nuevamente.
s0
Secuencia:E+ S+ E- A+ R+ E+ S- E- R- A-
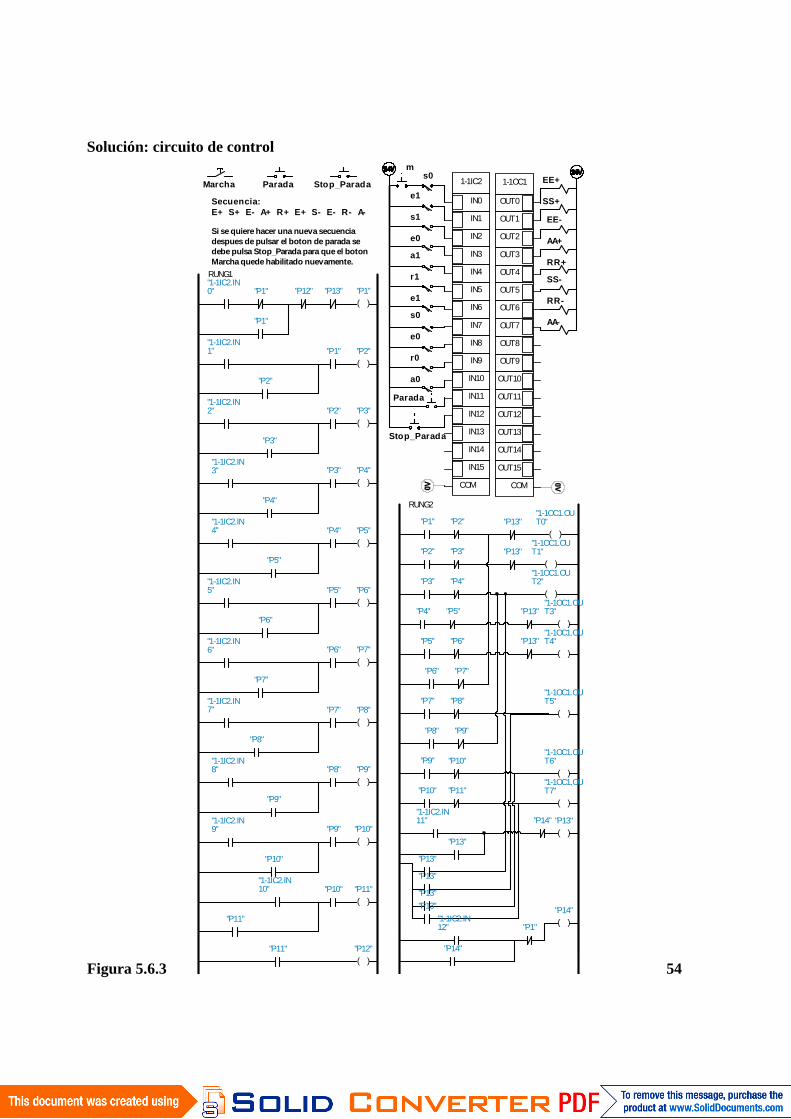
Solución: circuito de control
Figura 5.6.3 54END
RUNG1
"P1"( )"P1"
"P1"
END
RUNG2
"P1" "P2"
"1-1IC2.IN1"
( )"P2"
"P2"
"P2"( )
"1-1OC1.OUT1"
a0 a1 s0 s1
"1-1IC2.IN2"
"P3"
"P3"
"P1"
"P2"( )"P3"
"1-1IC2.IN3"
"P4"
"P3"( )"P4"
"1-1IC2.IN4"
"P5"
"P4"( )"P5"
"1-1IC2.IN5"
"P6"
"P5"
"1-1IC2.IN6"
"P7"
"P6"
( )"P6"
( )"P7"
"P3"( )
"1-1OC1.OUT2""P4"
"P4"( )
"1-1OC1.OUT3""P5"
"P5"( )
"1-1OC1.OUT4""P6"
"P6" "P7"
"P7"( )
"1-1OC1.OUT5""P8"
"P8" "P9"
"P9"( )
"1-1OC1.OUT6""P10"
"P10"( )
"1-1OC1.OUT7""P11"
( )
"1-1OC1.OUT0"
Marcha
RR-RR+
r0 r1 e0 e1
EE-EE+
1-1OC1
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
COM
EE+
SS+
EE-
AA+
SS-SS+AA-AA+
1-1IC2
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
m
"1-1IC2.IN0"
e1
s1
e0
a1
r1
e1
s0
e0
r0
a0
"1-1IC2.IN7"
"P8"
"P7"( )"P8"
"1-1IC2.IN8"
"P9"
"P8"( )"P9"
"1-1IC2.IN9"
"P10"
"P9"( )
"P10"
"1-1IC2.IN10"
"P11"
"P10"( )
"P11"
RR+
SS-
RR-
AA-
"P11"( )
"P12"
"P12"
( )"P13"
"P13"
"P13"
"1-1IC2.IN11"
"P13"
"P13"
"P13"
"P13"
"P13"
"P13"
Parada
Parada
"P13"
"P13"
( )"P14"
"1-1IC2.IN12"
"P14"
Stop_Parada
Stop_Parada
"P14"
"P1"
E+ S+ E- A+ R+ E+ R- A-S- E-
R
E
A
S
Si se quiere hacer una nueva secuenciadespues de pulsar el boton de parada sedebe pulsa Stop_Parada para que el botonMarcha quede habilitado nuevamente.
s0
Secuencia:E+ S+ E- A+ R+ E+ S- E- R- A-