capitulo 3º soluciÓn ecuaciÓn de estado-...
TRANSCRIPT

CAPITULO 3ºSOLUCIÓN ECUACIÓN DE ESTADO-
01
Ing. Diego A. Patiño G. M.Sc, Ph.D.

2
Solución de la Ecuación de EstadoSolución de Ecuaciones de Estado Estacionarias:
para un estado inicial x(0) y entrada u(t), t ≥ 0 dados. Empleando el procedimiento del factor integrante:
Para el caso estacionario (invariante en el tiempo), es decir: A, B, C, Dconstantes se debe determinar la solución x(t) de la ecuación

3
Solución de la Ecuación de Estado
de la integración de esta última ecuación entre 0 y t se obtiene
o lo que es lo mismo
Como la inversa de e−At es eAt y e0 = I, la solución es

4
Solución de la Ecuación de Estado
La ecuación anterior es la solución general de la ecuación de estado. Se conoce como la fórmula de variación de los parámetros. La substitución de dicha solución en la ecuación de salida (y = Cx + Du) genera y(t):
que evidencia la superposición de la respuesta a entrada cero, debida a las condiciones iniciales, y la respuesta en estado cero, debida a la entrada externa únicamente.

5
Solución de la Ecuación de Estado
La respuesta homogénea, para entrada cero es:
La respuesta la determina la matriz de transición de estados.El efecto de la matriz sobre la respuesta se visualiza empleando los retratos de fase.
X(0)C)y(CXYAXX
Atet =
==&

6
Solución de la Ecuación de Estado
Retrato de fase: grafo de varias respuestas a entrada cero en el plano de fase:
Se elige un conjunto de condiciones iniciales en un área de interés en el plano x1 vs x2
Se grafica la solución homogénea como una curva dirigida en el sentido positivo del tiempo.
)()( txtx =&

7
Retratos de fase. λ < 0. Jordan
Para la ecuación:
La solución es de la forma:
El sistema es desacoplado
XX ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
4001&
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛−
−
)0()0(
00
2
14
2
1
xx
ee
xx
t
t

8
Retratos de fase. λ < 0. Jordan
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Diagrama de fase
x1
x2

9
Retratos de fase. λ < 0. Jordan
Valores propios: -1 y -4Vectores propios: [0 1]’ y [1 0]’.Si una condición inicial coincide con una de estas direcciones, también lo hará la solución: es el subespacio invariante.Independiente de la condición inicial las trayectorias tienden al origen [0 0]. Origen: punto de equilibrio estable
Es la tangente a la curva para todo tAxx =&

10
Respuesta paso. λ < 0
Si B = (1 4)´ yC = (1 1) Transfer function:5 s + 8
-------------s^2 + 5 s + 4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Respuesta paso
x1
x2
y

11
Retratos de fase. λ < 0.
Qué representa un cambio de base?
Los vectores propios: [1 -1]’ y [1 2]’
La matriz A nueva:
4;1;3212
21 −=−=⎟⎟⎠
⎞⎜⎜⎝
⎛−−−−
= λλXX&
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=⎟⎟
⎠
⎞⎜⎜⎝
⎛−
= −
1112
31
2111 1MyM
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−== −
4001ˆ AMMA 1

12
Retratos de fase. λ < 0.
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Diagrama de fase

13
Retratos de fase. λ < 0.
Valores propios: -1 y -4Vectores propios: [1 -1]’ y [1 2]’.Si una condición inicial coincide con una de estas direcciones, también lo hará la solución: es el subespacio invariante. Solamente se han rotado los ejesIndependiente de la condición inicial las trayectorias tienden al origen [0 0]. Origen: punto de equilibrio estable
Es la tangente a la curva para todo tAxx =&

14
Retratos de fase. λ < 0.
B y C nuevas son:
La función de transferencia:
La descripción entrada – salida es invariante bajo transformaciones similares.
( ) ( )011112
3111ˆ
75
41
2111ˆ
=⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
C
B
)4)(1(85)(++
+=
ssssH

15
Respuesta paso
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Respuesta paso
Time (sec)
Ampl
itude
La respuesta paso es invariante bajo una transformación similar
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Respuesta paso
x2
X1, y

16
Retratos de fase λ repetidos, < 0
Para valores propios repetidos:
λ1,2 = -2Solo hay un vector propio: (-1 1)’Las trayectorias tienden al origen. No se cortan.Las trayectorias no pueden rotar mas de 180°Para la forma canónica es necesario definir vector propio generalizado
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−=
3111
A

17
Retratos de fase λ repetidos, < 0
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Diagrama de fase

18
Retratos de fase λ repetidos, <0
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.2
0
0.2
0.4
0.6
0.8
1
1.2Respuesta entrada cero

19
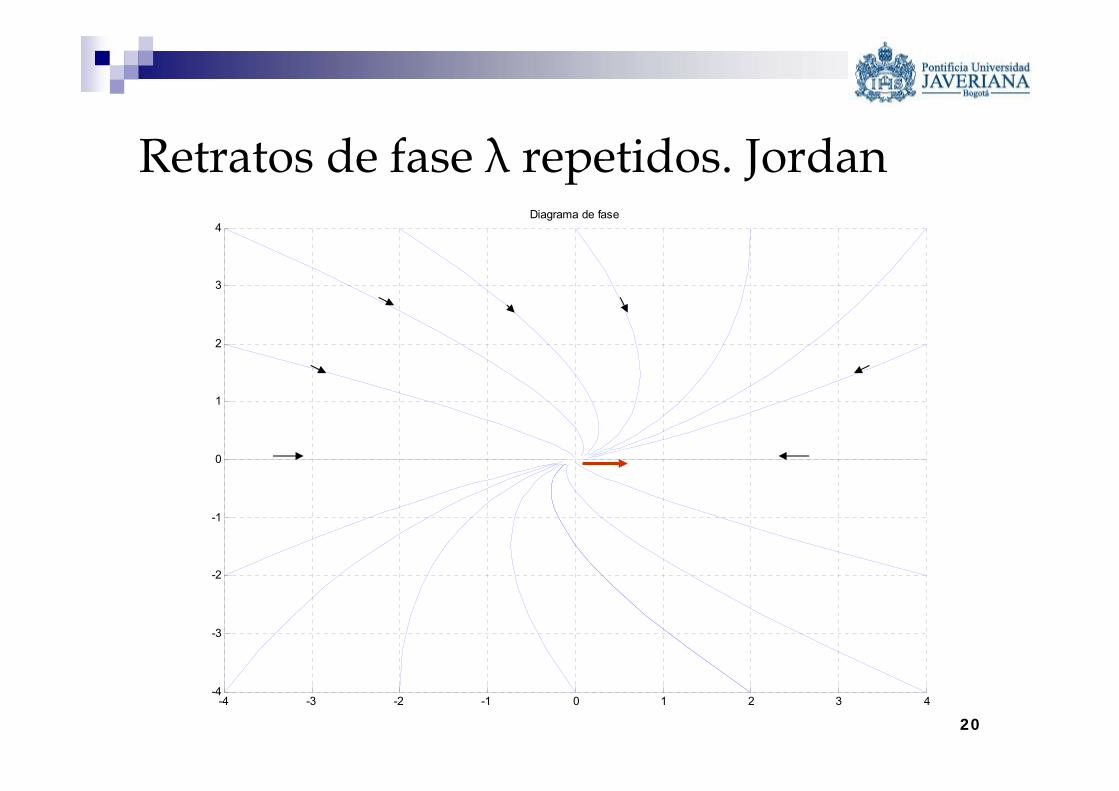
Retratos de fase λ repetidos. Jordan
Para valores propios repetidos:
λ1,2 = -2Solo hay un vector propio: (1 0)’Para la forma canónica es necesario definir vector propio generalizado
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
2012
A
20
Retratos de fase λ repetidos. Jordan
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4Diagrama de fase

21
Retratos de fase. λ > 0
Sistema con valores propios en la parte derecha del plano complejo:
Vectores propios:(1 0)’ y (0 1)’
Soluciones:
2;1;1002
21 −==⎟⎟⎠
⎞⎜⎜⎝
⎛−= λλA
)0(
)0(
22
12
1
xex
xext
t
=
= −

22
Retratos de fase. λ > 0
-4 -3 -2 -1 0 1 2 3 4-30
-20
-10
0
10
20
30Diagrama de fase

23
Retratos de fase. λ > 0
La dirección e2 (0 1)’ diverge: toda solución en esa dirección es creciente.La dirección e1 (1 0)’ tiende hacia el origen.Para sistemas LIT las soluciones sólo se cruzan en el origen.Para un sistema LIT no puede haber dos soluciones LI en el mismo punto, excepto el origen. Las soluciones son suaves: sólo existe una tangente en cada punto

24
Retratos de fase. λ > 0
Los mismos valores propios del caso anterior.Vectores propios:
(-0.8944 0.4472)’(0.4472 -0.8944)’
El mismo retrato de fase rotado
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−=
2223
A

25
Retratos de fase. λ > 0
-6 -4 -2 0 2 4
-10
-8
-6
-4
-2
0
2
4
6
8
10
Diagrama de fase

26
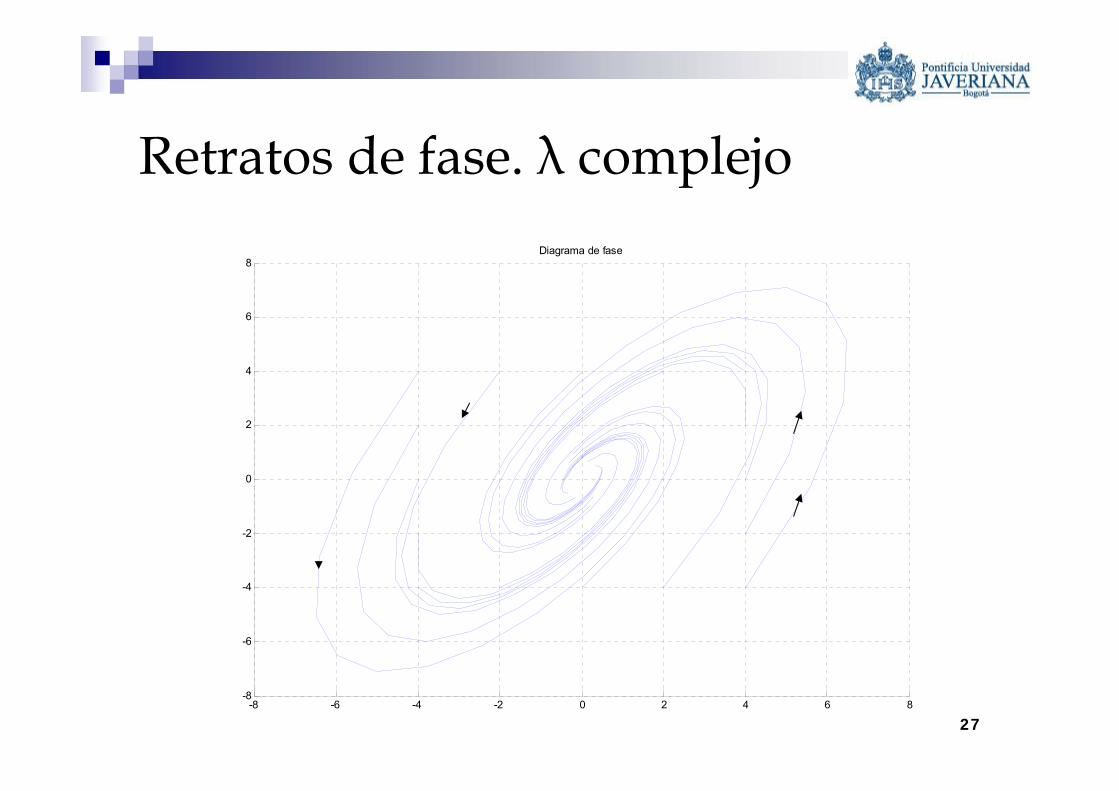
Retratos de fase. λ complejo
Valores propios complejos:
Los λ: -1.0 + 3.0i y -1.0 - 3.0iLos vectores propios:
(0.4082 + 0.4082i 0.8165)’(0.4082 - 0.4082i 0.8165)’
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=4632
A
27
Retratos de fase. λ complejo
-8 -6 -4 -2 0 2 4 6 8-8
-6
-4
-2
0
2
4
6
8Diagrama de fase

28
Retratos de fase. λ complejo
No hay dirección invariante. Los vectores propios complejos no tienen significado geométrico.Las espirales rotan alrededor del origenComo el sistema es estable, parte real de los valores propios negativa, las espirales son hacia adentro.La respuesta a entrada cero en el tiempo es sub -amortiguada

29
Respuesta entrada cero. λ complejo
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-5
-4
-3
-2
-1
0
1
2
3
4Respuesta entrada cero
x1x2

30
Retratos de fase. λ imaginario
Valores propios imaginarios:
Los λ: + 3.0i y - 3.0iLos vectores propios:
(0.169 + 0.503i 0.8452)’(0.169 - 0.503i 0.8452)’
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=1521
A

31
Retratos de fase. λ imaginario
-5 -4 -3 -2 -1 0 1 2 3 4 5-8
-6
-4
-2
0
2
4
6
8Diagrama de fase

32
Retratos de fase. λ imaginario
Los ejes de las elipses están a lo largo de los vectores singulares de la matriz A:
U =-0.2898 -0.9571-0.9571 0.2898
S =5.3028 0
0 1.6972
V =0.9571 -0.2898
-0.2898 -0.9571

33
Solución de la Ecuación de EstadoPara el sistema LIT la solución de la ecuación de estado también se puede calcular en el dominio de la frecuencia empleando la transformada de Laplace:
La matriz de transición de estados:
Ejemplo: Consideremos la ecuación
34
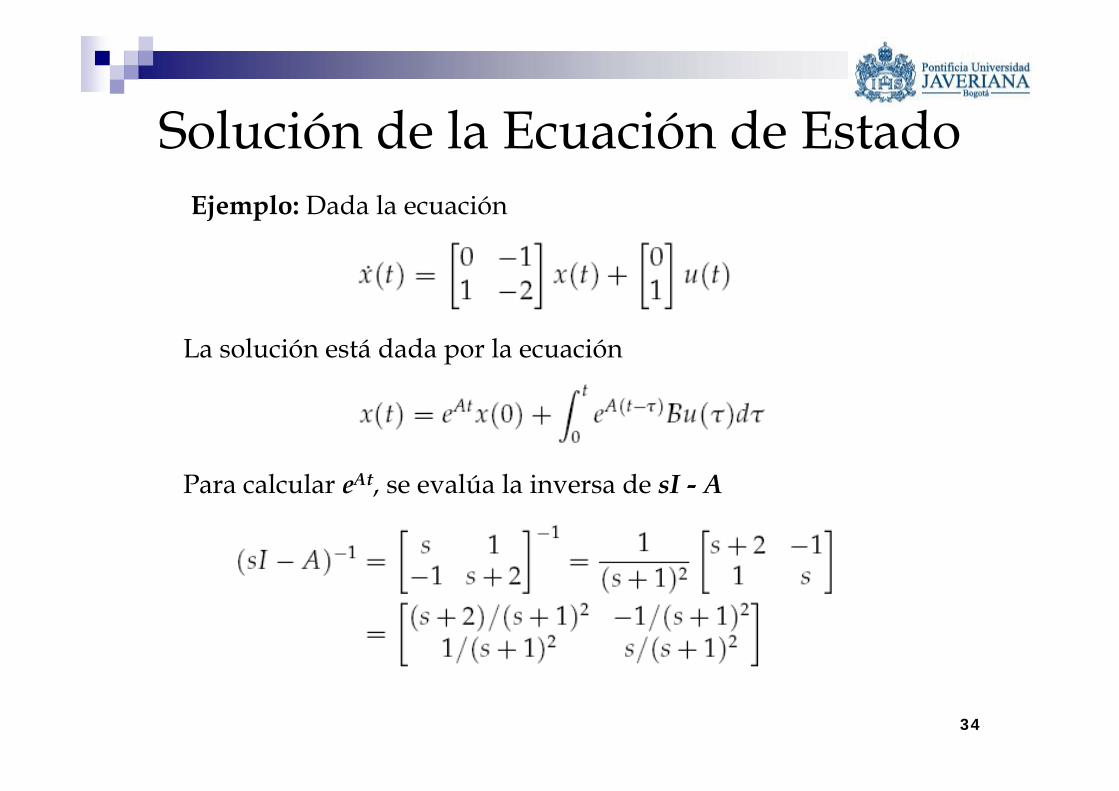
Solución de la Ecuación de Estado
La solución está dada por la ecuación
Para calcular eAt, se evalúa la inversa de sI - A
Ejemplo: Dada la ecuación

35
Solución de la Ecuación de Estado
Empleando la expansión en fracciones simples y usando una tabla de transformada Laplace.
También se puede directamente por la fórmula de variación de los parámetros

36
Solución de la Ecuación de EstadoComportamiento Asintótico de la Respuesta a Entrada Nula
De la forma de eJt donde J está en forma de Jordan se puede deducir el comportamiento asintótico de la respuesta del sistema a condiciones iniciales. Dado un sistema cuya matriz
J = Q−1AQ es

37
Solución de la Ecuación de EstadoLa respuesta a entrada nula de esLa expresión para eAt es:
Cada elemento de eAt será una combinación lineal de los términos
asociados con los valores propios de A y sus multiplicidades.

38
Solución de la Ecuación de EstadoDe los casos analizados se puede deducir que
• Si todos los valores propios de A, repetidos o no, tienen parte real negativa, || eAt || → 0 cuando t → ∞.
• Si algún valor propio de A tiene parte real positiva, || eAt || → ∞cuando t → ∞.
• Si ningún valor propio de A tiene parte real positiva, y los autovalores con parte real cero son de multiplicidad 1, || eAt || ≤ αcuando t → ∞.
• Si A tiene autovalores con parte real cero de multiplicidad 2 o mayor, || eAt || → ∞ cuando t → ∞.

39
Solución de la Ecuación de EstadoEjemplo: Para un oscilador armónico, donde
obtenemos
de donde
Entonces la respuesta a una entrada nula
será oscilatoria.

40
Solución de la Ecuación de EstadoForma Canónica Modal:
La solución de la ecuación de estado pertenece a un espacio vectorial.Los vectores propios de A se pueden emplear como base de dicho espacio vectorial. Esta es la descomposición modal del sistema.Sea {ei } el conjunto de n vectores propios LI, incluyendo vectores propios generalizados. En términos de esta base las soluciones se pueden representar como:
∑=
=n
iii tt
1)()( ex ξ
Los ξ son los modos del sistema, y son funciones del tiempo

41
Solución de la Ecuación de Estado
∑=
=n
iii tt
1)()( eBu β
El término Bu(t) también se puede descomponer como:
Reemplazando en la ecuación original:
[ ] 0)()()(
)()()(11
=−−
+=
+=
∑
∑∑∑
=
===
n
1i
n
1i
iiii
n
iii
n
iiiii
ttt
ttt
eIAI
eAee
BuAxx
βξξ
βξξ
&
&
&

42
Solución de la Ecuación de Estado
[ ]0)()()(
0)()()(
,..,1
=−−
=−−
==
∑=
ttt
ttt
ni
iiii
iiiii
iii
βλξξ
βλξξ
λ
&
&n
1i
e
eAe
Como {ei } es un conjunto de vectores propios Linealmente independientes:
Conjunto de n ecuaciones lineales, escalares, independientes e invariantes:
nittt iiii ,...,1)()()( =+= βλξξ&

43
Solución de la Ecuación de EstadoLos modos son equivalentes a una nueva variable de estado:
DuCMξYBuMAMξMξ
BuAMξξM
Mξx
+=+=
+=
=
−− 11&
&
La nueva matriz M-1AM es diagonal y para valores propios diferentes es desacoplada

44
Solución de la Ecuación de Estado
)0()0(
)()0()(0
1)(ˆˆ
XMξ
BuMξξ
1
AA
−
−−
=
+= ∫t
tt deet τττ
La solución modal:
La solución es sencilla de obtener debido a la forma desacoplada de las ecuaciones.Para regresar a la representación original:
MξX =

45
Solución de la Ecuación de Estado
Descomposición modal permite evaluar :ControlabilidadObservabilidadEstabilidad
Si se retienen los modos dominantes el sistema se puede aproximar por uno de más bajo orden

46
REFERENCIAS
1. CHEN C.T. Linear Systems Theory and Design. 3rd Edition. New York: Oxford University Press. 1999
2. BAY J.S. Fundamentals of Linear State Space Systems, New York: McGraw Hill International Edition,. 1999.