capitulo 2 – procesos estocasticos, definiciones, tipos de procesos
TRANSCRIPT

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
1
FUNCIONES ALEATORIAS
Una variable aleatoria se define como una función que representa gráficamente el resultado de un experimento a los números reales, esto es, X(), donde es un elemento del espacio muestral .
Si la variable aleatoria es a su vez función de otra magnitud (por ejemplo, el tiempo) entonces se llama PROCESO ESTOCASTICO.
Más formalmente, un proceso estocástico es una función de dos variables t y . X(t,) t T y Donde T es un conjunto de parámetros índice (continuos o discretos) y es el
espacio muestral. Hay cuatro posibilidades para X( . , . ):
1) Para cualquier t, X(t,) es una función aleatoria. 2) Para t variando y fija, i X(t,i) es una función del tiempo o realización. 3) Para variando y t fija, t ti X(ti,) es una función variable aleatoria. 4) Para t y fijas, i y t ti X(ti,) es un número. En la práctica hay magnitudes aleatorias que varían sus valores en el proceso del experimento. La magnitud aleatoria que cambia su valor en el proceso de una prueba representa una función aleatoria.
Se puede dar la siguiente definición general: Se llama función aleatoria a aquella cuyo valor, para cada valor del argumento (o de los argumentos) es una variable aleatoria.
Cada función concreta que puede ser registrada durante una sola observación de la función aleatoria se llama realización de la misma.
Si se repiten las pruebas se obtienen diferentes realizaciones de la función aleatoria. Debido a la naturaleza estocástica de las funciones muestras (realizaciones), las propiedades de una colección de realizaciones son descriptas sólo en un sentido estadístico. EJEMPLO DE FUNCIÓN ALEATORIA
Supóngase que se está registrando la potencia eléctrica, mediante un vatímetro, durante las 24 horas del día a la entrada de un consumo (por ejemplo, antes del tablero de entrada de la Universidad de Mendoza). Si cada medida ha sido realizada en intervalos de 10 minutos, al final del día se habrán logrado 144 lecturas de potencia conformando un vector fila de 144 elementos. Si los registros se repiten día a día durante un año, se habrán logrado 360 de estos vectores fila, que apilados uno debajo del otro conformarán una matriz de dimensión 360x144. Conforme a lo expresado en el punto anterior, cada fila está expresando una variación de t (mantenida constante, esto es en cada instante ocurrió el evento ) y por lo tanto representa una realización del proceso estocástico.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
2
Si se representaran gráficamente todas la filas de la matriz, se obtendrían 360 realizaciones que explicarían la función aleatoria X(t) representada mediante la matriz mencionada. Otra forma de visualizar el mismo proceso es a través de las columnas de la matriz. En ese caso, el tiempo permanece constante y varían los eventos . Evidentemente se está en el caso de un conjunto de 144 variables aleatoria, una por cada fila de la matriz a las que se podría realizar un histograma que daría una indicación de la función densidad de probabilidad de cada una de ellas. NOMENCLATURA
Las funciones aleatorias se indicarán con letras latinas mayúsculas (generalmente últimas letras del alfabeto). Las realizaciones, con las minúsculas correspondientes. Con t se designará el argumento de la función aleatoria.
Es posible representar gráficamente un conjunto de realizaciones, pero no una función aleatoria.
Los argumentos de las funciones aleatorias pueden variar ininterrumpidamente en cierta zona o de un modo discreto. Los valores de la función aleatoria de un argumento discreto tienen una secuencia de magnitudes aleatorias llamadas secuencia aleatoria.
La función aleatoria se puede considerar como el conjunto de magnitudes aleatorias Xt que representan los valores de la misma para diferentes valores de t:
X t X( )t ( < t < ) Esto quiere decir que la función aleatoria es equivalente a un conjunto infinito
de variables aleatorias. De acuerdo a la definición el valor de una función aleatoria escalar, para
cualquier valor fijado del argumento t, es una magnitud aleatoria corriente. Se sabe que cualquier magnitud aleatoria se caracteriza por completo por su ley de
distribución. Por lo tanto, la característica completa del valor de la función de la función aleatoria X(t), para cualquier valor fijado de t, es la densidad de probabilidad de este valor, que se designa por f1(x;t).
Aquí, el primer argumento x designa el valor posible de la función aleatoria X(t) para un valor fijo de t. El segundo argumento t sirve de parámetro, del cual depende la densidad de probabilidad f1(x;t).
La densidad unidimensional de probabilidad f1(x;t). no es suficiente, en el caso general, para una característica completa de la función aleatoria. Dicha densidad puede caracterizar solamente a cualquier ordenada, tomada por aislada, de una función aleatoria.
En la práctica, cuando se puede desear hallar derivadas o integrales de funciones aleatorias, es necesario examinar valores próximos de la función (derivada) o muchos valores para un número grande de valores de t (integral).
Durante la derivación es necesario examinar las ordenadas de una función aleatoria no por aislado, sino conjuntamente. De acuerdo con lo expuesto se fijan dos valores del argumento t: t1 y t2. Los valores X(t1) y X(t2) de la función aleatoria correspondientes a los valores mencionados del argumento, pueden caracterizarse por la densidad conjunta de probabilidad f2(x1,x2;t1,t2) que se llama densidad bidimensional de probabilidad de la

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
3
función aleatoria X(t). En los problemas prácticos se encuentran con mayor frecuencia funciones aleatorias
del tiempo, sin embargo, se tiene también que operar también con funciones aleatorias de otros argumentos.
De acuerdo a los conceptos de densidad bivariada, la densidad univariada queda definida por la bivariada:
f1( ),x1 t1 d
x2f2( ),,,x1 x2 t1 t2
La densidad bidimensional de probabilidad de una función aleatoria representa una característica más completa de la misma que la unidimensional, puesto que por la densidad bidimensional se puede determinar la unidimensional.
Pero tampoco la bidimensional es completa. Se puede seguir razonando del mismo modo hasta n dimensiones. De modo que cada densidad de distribución posterior es una característica más completa de la función aleatoria que todas las densidades anteriores.
Para el caso de la función aleatoria normalmente distribuida toda la secuencia infinita de densidades de probabilidad se determina por completo si se conoce la densidad bidimensional de probabilidad.
La característica de probabilidad completa de de una magnitud aleatoria resulta ser muy compleja. En la práctica se simplifica el trabajo, siendo necesario conocer los momentos de primero y segundo orden. ESPERANZA MATEMATICA DE UNA FUNCION ALEATORIA
Fíjese el valor de t y examínese el valor de la función aleatoria (para este valor del argumento) como una magnitud aleatoria corriente. Para esta magnitud aleatoria se puede determinar la esperanza matemática , que hablando en general, dependerá del valor elegido de t. Dando a t todos los valores posibles, se obtendrá cierta función mx(t) a la cual es natural llamarla Esperanza matemática de la función aleatoria X(t). mx(t) = M [ X(t) ] La esperanza matemática de la función aleatoria se puede expresar por su densidad unidimensional de probabilidad:
m x( )t d
x.x f1( ),x t
Según la definición, la esperanza matemática representa el valor medio (pesado en cuanto a probabilidad) de la magnitud aleatoria. Por lo tanto, para cada valor dado de t, la ordenada de la curva mx(t) representa el valor medio de la función aleatoria X(t) para este valor de t.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
4
Así, pues, la esperanza matemática de la función aleatoria no es más que una curva media alrededor de la cual se disponen las realizaciones posibles de la función aleatoria. Ejemplo: Se dispone de una función aleatoria dada por la siguiente expresión:
X ,i k .Ui sin ..tk 180 Ui
Si Ui es un vector de elementos aleatorios tal como el que surge de rnd(1) valores
equiprobables entre 0 y 1. i ..0 9 índice que indicará realización Ui rnd( )1 Vector de elementos aleatorios
La función aleatoria será un conjunto de sinusoides con amplitud y frecuencia
aleatorias. k ..0 90 índice que indica valores dentro de una realización tk .k 4 vector de valores de tiempo para evaluar
X ,i k .Ui sin ..tk
180 Ui Ui La expresión anterior corresponde a una matriz cuyas filas son realizaciones de la
función aleatoria.
Calculando las medias de las realizaciones en cada uno de los puntos de definición, se encuentra la media de la función aleatoria.
El vector M contiene las medias en cada punto considerado de la función aleatoria Mk mean < >X k

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
5
DISPERSION DE UNA FUNCION ALEATORIA
Es evidente que al considerar solamente la esperanza matemática de la función aleatoria, se desprecian todas las desviaciones aleatorias posibles, reduciendo a la media todo el haz de realizaciones posibles de la función aleatoria. Importan también las desviaciones aleatorias respecto de estos valores medios.
Conforme a esto, para caracterizar la fluctuación de las realizaciones de una función en torno a su esperanza matemática, se puede aprovechar la dispersión de dicha función, la cual por definición, va expresada por la densidad unidimensional de probabilidad de la función aleatoria por la fórmula:
Dx(t) = M { [ X(t) - mx(t) ] 2 }} = M { [ X0(t) ] 2 }} D x( )t d
x.x m x( )t 2 f1( ),x t En problemas prácticos a veces es conveniente examinar la desviación standard de
la función aleatoria. ( )t D x( )t
La esperanza matemática y la dispersión (varianza) de la magnitud aleatoria son características numéricas de sus valores para cada valor dado del argumento t.
Ellas en cierto modo determinan la banda que se llena, por las realizaciones posibles de la función aleatoria.
Ejemplo: Continuando con la función anterior, se puede hallar la desviación standard punto por punto:
Sk stdev < >X k el vector S contiene las desviaciones standard en
cada punto considerado de la función aleatoria

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
6
FUNCION DE CORRELACION DE UNA FUNCION ALEATORIA
A pesar de lo expresado anteriormente, la esperanza matemática y la dispersión no determinan la conducta de las realizaciones posibles de la función aleatoria dentro de la banda indicada.
En las siguientes figuras se representan las realizaciones de dos funciones aleatorias con iguales esperanzas matemáticas y dispersiones. Sin embargo, estas se comportan de un modo completamente diferente.
Es obvio que al derivar, por ejemplo, estas dos funciones aleatorias se obtendrán resultados absolutamente diferentes. Por eso, además de la esperanza matemática y de la dispersión de la magnitud aleatoria, se necesita conocer el grado de variabilidad de sus realizaciones, la rapidez de cambio de las mismas al variar el argumento t.
A título de ejemplo, se toman dos valores t1 y t2 del argumento t en los dos gráficos y se separa una realización de la función aleatoria de cada gráfico. En el primer caso, el conocimiento de la ordenada de la realización en el punto t1 habla poco del valor de esta realización en el punto t2, como resultado de una gran intensidad de variación de todas las realizaciones de la función aleatoria entre los puntos t1 y t2.
En el segundo gráfico, el conocimiento del valor de la realización en t = t1 permite indicar más exactamente el valor posible de la realización cuando t = t2.
En otras palabras, en el segundo caso el conocer el valor de la realización en el punto t = t1 prácticamente limita de modo considerable la gama posible de valores de las realizaciones en el punto t = t2.En el primer caso, los valores de las realizaciones posibles de la función aleatoria X(t1) y X(t2) en los puntos t1 y t2 dependen poco uno de otro. En el segundo caso, estos están enlazados por una dependencia más fuerte.
Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
7
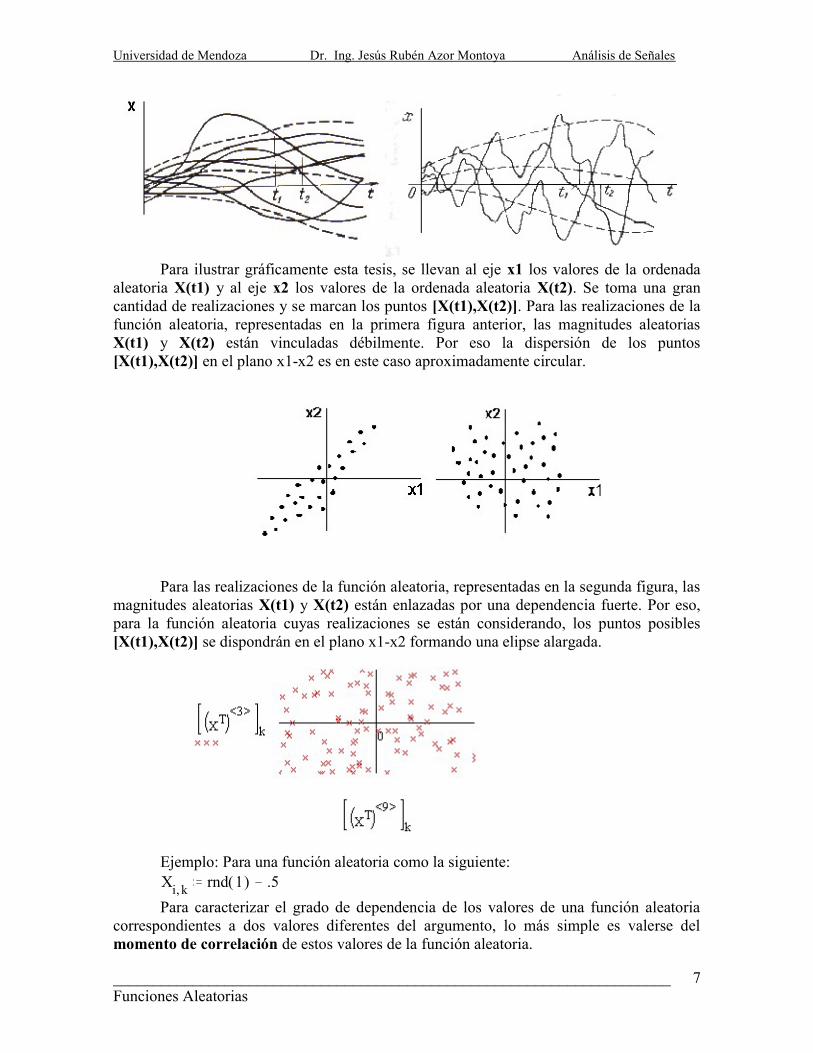
Para ilustrar gráficamente esta tesis, se llevan al eje x1 los valores de la ordenada aleatoria X(t1) y al eje x2 los valores de la ordenada aleatoria X(t2). Se toma una gran cantidad de realizaciones y se marcan los puntos [X(t1),X(t2)]. Para las realizaciones de la función aleatoria, representadas en la primera figura anterior, las magnitudes aleatorias X(t1) y X(t2) están vinculadas débilmente. Por eso la dispersión de los puntos [X(t1),X(t2)] en el plano x1-x2 es en este caso aproximadamente circular.
Para las realizaciones de la función aleatoria, representadas en la segunda figura, las
magnitudes aleatorias X(t1) y X(t2) están enlazadas por una dependencia fuerte. Por eso, para la función aleatoria cuyas realizaciones se están considerando, los puntos posibles [X(t1),X(t2)] se dispondrán en el plano x1-x2 formando una elipse alargada.
Ejemplo: Para una función aleatoria como la siguiente: X ,i k rnd( )1 .5 Para caracterizar el grado de dependencia de los valores de una función aleatoria
correspondientes a dos valores diferentes del argumento, lo más simple es valerse del momento de correlación de estos valores de la función aleatoria.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
8
Se llama Función Aleatoria Centrada a la diferencia entre la función aleatoria y su esperanza matemática: X 0 ( t ) = X ( t ) - mx ( t ) Entonces, el momento de correlación de los valores X(t) y X(t') de la función aleatoria X(t), que corresponden a dos valores arbitrarios elegidos del argumento t , t', se determinará por la fórmula:
kx ( t , t' ) = E [ X 0 ( t ) . X 0 ( t' )] dando a t y t' todos los valores posibles en la zona de variación del argumento de la función aleatoria X ( t ) , se obtiene la función de dos variables t y t' que se denomina Función Correlativa (a veces Autocorrelativa) de la función aleatoria X ( t ).
Así pues, se llama función correlativa de la función aleatoria X ( t ) al momento de correlación de sus valores para dos valores del argumento t, t', considerado como una función de t y t'.
Al coincidir los valores de los argumentos t = t', el segundo miembro de la fórmula anterior representa la esperanza matemática del cuadrado de la función aleatoria centrada, es decir, la dispersión de la función aleatoria X(t).
k ( ),t t D x( )t
Así, la asignación de la función correlativa de una función aleatoria determina también su dispersión.
En el caso más general de todos, para calcular la función correlativa de una función aleatoria se debe conocer la densidad bidimensional de probabilidad:
k x( ),t t´ d
x´d
x..x m x( )t x´ m x( )t´ f2( ),,,x x´ t t´
De esta fórmula y de otra anterior [para calcular mx(t)] se ve que para calcular ambas funciones se necesita conocer la densidad bidimensional (y por consiguiente la unidimensional) de probabilidad. Sin embargo, en muchos problemas prácticos se puede calcular mx(t) y kx(t,t') empleando métodos más simples.
A veces, para caracterizar el enlace entre los valores de una magnitud aleatoria, en vez de la función correlativa, se usa la Función Correlativa Normada que representa el coeficiente de correlación de los valores de la función aleatoria para dos valores del argumento.
La función correlativa normada de una función aleatoria normada de una función aleatoria X(t) se determina por la fórmula:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
9
R x( ),t t´ k x( ),t t´.D x( )t D x( )t´
k x( ),t t´.k x( ),t t k x( ),t´ t´
En lo sucesivo se necesitará examinar todavía el momento inicial de segundo orden de una función aleatoria, el cual se determina como el momento inicial mixto de segundo orden de sus valores para los valores arbitrariamente elegidos t , t' de su argumento.
x( ),t t´ M( ).X( )t X( )t´ k x( ),t t´ .m x( )t m x( )t´ De acuerdo con la definición del momento de correlación de las magnitudes
aleatorias complejas, la función correlativa de una función aleatoria compleja X(t) se determina por:
k x ( t , t' ) = M [ X0 ( t ) . X0 ( t' )* ]
Donde X0 ( t' )* es el conjugado de X0 ( t' ).
PROPIEDADES DE LAS ESPERANZAS MATEMATICAS 1) La esperanza matemática de cualquier magnitud no aleatoria es igual a la propia magnitud:
M( )c c 2) La esperanza matemática del producto de una magnitud no aleatoria por una aleatoria es igual al producto de la primera magnitud por la esperanza matemática de la segunda.
M( ).c Z .c M( )Z 3) La esperanza matemática de la suma de dos magnitudes aleatorias es igual a la suma de sus esperanzas matemáticas.
M( )Z Y M( )Z M( )Y 4) La esperanza matemática de una función lineal de variables aleatorias de la forma:
U= 1
n
i.ai Zi b
es igual a la misma función de las esperanzas matemáticas de estas magnitudes:
m u= 1
n
i.ai mzi b
PROPIEDADES DE LAS DISPERSIONES Y DE LOS MOMENTOS DE CORRELACION

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
10
1) La dispersión de cualquier magnitud no aleatoria es igual a cero y el momento de correlación de dos magnitudes no aleatorias es igual a cero. 2) El momento de correlación del producto de cualquier magnitud aleatoria con otra no aleatoria es siempre igual a cero. 3) La dispersión del producto de una magnitud aleatoria por otra no aleatoria es igual al producto de la dispersión de la magnitud aleatoria por el cuadrado del módulo de la no aleatoria.
D( ).c X .( )c 2 D( )X 4) El momento de correlación de las magnitudes aleatorias:
U .a X V .b Y donde a y b son constantes complejas (para generalizar) arbitrarias y X e Y son magnitudes aleatorias, se determina por la fórmula:
k uv ..a b k xy 5) Si las magnitudes aleatorias U y V representan funciones lineales de las magnitudes aleatorias X1, X2, ... , Xn :
U= 1
n
i.ai Xi b
V
= 1
n
i.ci Xi d
entonces la dispersión de la magnitud aleatoria U y el momento de correlación de las magnitudes aleatorias U y V se determinan por las fórmulas:
D u= 1
n
i = 1
n
j..ai aj kij
k uv
= 1
n
i = 1
n
j..ai cj kij
(48-1) (1)
donde kij es el momento de correlación de las magnitudes aleatorias Xi, Xj (cuando i=j, la magnitud kii representa la dispersión de la magnitud aleatoria Xi) 6) En el caso particular, cuando se trata de magnitudes aleatorias no correlacionadas X1, X2, ... , Xn las magnitudes kij con distintos índices son iguales a cero y las fórmulas anteriores se convierten en:
D u= 1
n
i.ai
2 Di
k uv= 1
n
i..ai cj Di
(48-2) (2)
Donde Di = kii es la dispersión de la magnitud aleatoria Xi (i = 1,...,n) Un caso particular de (48-1) es:
U= 1
n
iXi
luego:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
11
D u= 1
n
i = 1
n
jkij
7) Y si las magnitudes aleatorias X1, X2, ... , Xn no están correlacionadas:
D u= 1
n
iDi
Las dos últimas fórmulas son aplicables para cualesquiera magnitudes aleatorias no correlacionadas. En particular, son válidas para las magnitudes aleatorias independientes. EJEMPLOS DE FUNCIONES ALEATORIAS 1. Se va a considerar la siguiente función aleatoria:
X( )t .U sin( )t .V cos( )t (49-1) (2)
Donde U y V son magnitudes aleatorias no correlacionadas (kuv = 0)cuyas
esperanzas matemáticas son nulas y cuyas dispersiones son iguales a D1 y D2 respectivamente.
Las realizaciones de esta función son sinusoides con diferentes amplitudes y fases iniciales.
En el ejemplo en cuestión la función aleatoria representa la combinación lineal de dos magnitudes aleatorias con los coeficientes sin(t) y cos(t).
nr 100 Número de realizaciones i ..0 nr 1 índice que indica realización vr 90 Valores dentro de una realización k ..0 vr 1 índice que indica valores dentro de una realización tk .k 4 vector de valores de tiempo para evaluar n ..0 11 índice auxiliar Ui
nrnd( )1 6
Vi
nrnd( )1 6
U y V son vectores con valores distribuidos normalmente con media cero y varianza uno. X ,i k .Ui sin .tk
180 .Vi cos .tk 180
matriz cuyas filas son valores de realización
r ..9 18 índice para lograr 10 realizaciones en el siguiente gráfico

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
12
Calculando las medias de las 20 realizaciones en cada uno de los puntos de definición, se encuentra la media de la función aleatoria.
Mk mean < >X k el vector M contiene las medias en cada punto considerado
de la función aleatoria
Del mismo modo se puede hallar la desviación standard punto por punto: Sk stdev < >X k
el vector S contiene las desviaciones standard en cada punto considerado de la función aleatoria
Superponiendo la media y la desviación standard a las realizaciones, queda gráficamente:
Según la teoría, la media de esta función aleatoria es cero y la desviación
standard es uno.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
13
Esto, gráficamente, significa que la mayoría de las realizaciones se centra sobre la media y además se halla concentrada mayoritariamente dentro una franja que tiene un ancho de dos desviaciones standard con eje de dicha franja en la media.
Para hallar la función de correlación, se procede del siguiente modo:
Cki
.< >X 0i
< >X ki
rows( )X El vector C contendrá, punto a punto, los valores
de la función de correlación, que según la teoría es una de tipo cosenoidal. Teóricamente, aplicando una de las propiedades de la esperanza matemática a la
expresión (49-1), se deduce: m x( )t .mu sin( )t .mv cos( )t 0
por ser la esperanzas matemáticas, de ambas magnitudes aleatorias, nulas. Poniendo t = t' en la función aleatoria: X( )t´ .U sin( )t´ .V cos( )t´ Los valores X(t) y X(t') de la función aleatoria examinada, para dos valores
arbitrarios del argumento, son combinaciones lineales de dos magnitudes aleatorias no correlacionadas U y V.
Aplicando la propiedad (48-2) de los momentos de correlación de dos combinaciones lineales de magnitudes aleatorias no correlacionadas, se halla la función correlativa de la función aleatoria X(t).
k ( ),t t´ ..D1 sin( )t sin( )t´ ..D2 cos( )t cos( )t´ En el caso particular, cuando D1 = D2 = D, queda:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
14
k ( ),t t´ .D cos( )t t´ (49-2) (3) ______________________________________________________________________ 2) En un caso más general, cuando:
X( )t= 1
n
i.Xi f i( )t
Donde f1(t), ... , fn(t) son funciones no aleatorias cualesquiera, en el caso más general complejas, y X1, ..., Xn son magnitudes aleatorias cualesquiera con esperanzas matemáticas arbitrarias pero finitas, y momentos de segundo orden.
La esperanza matemática se halla aplicando la propiedad de las esperanzas matemáticas de una función lineal de las magnitudes aleatorias:
m x( )t= 1
n
i.mxi f i( )t
ya que los valores de la función aleatoria que se examina son, para dos valores del argumento arbitrariamente elegidos, funciones lineales de las mismas magnitudes aleatorias, se puede aplicar la propiedad (48-1):
k x( ),t t´= 1
n
i..kij f i( )t f j( )t´
donde kij es el momento de correlación de las magnitudes aleatorias Xi, Xj ( i,j = 1, ... , n y kii = Dxi . ______________________________________________________________________ 3. Generalizando el problema 1, suponer aleatorias no sólo la amplitud y la fase sino
también la frecuencia de las oscilaciones armónicas. Examínese la función aleatoria:
X( )t .U sin( ). t .V cos( ). t Donde U, V y son magnitudes aleatorias independientes, con la particularidad que las
magnitudes U y V tienen medias nulas y las mismas dispersiones D, y la magnitud aleatoria se caracteriza por la densidad de probabilidad f(). La esperanza matemática de la función aleatoria X(t) es idénticamente igual a cero.
Esto se puede demostrar fijando un valor particular de , lo que lleva al primer ejemplo. La fórmula (49-2) determina la función correlativa condicional de la función aleatoria
X(t) para el valor dado de de la frecuencia . k x ( t , t' / ) = M [ X(t) . X(t) / D . cos t - t' ) ] Ahora, para hallar la función correlativa de la función aleatoria X(t) basta

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
15
multiplicar la función correlativa condicional hallada, con el elemento correspondiente de probabilidad f(deintegrar con respecto a todos los valores posibles de de la magnitud aleatoria . Entonces, teniendo en cuenta que la frecuencia de las oscilaciones es, en su esencia, una magnitud positiva, debido a lo cual su densidad de probabilidad f() es igual a cero para 0, se obtiene:
k x( ),t t´ .D d
0
.f( ) cos( ). ( )t t´ Examínese el caso concreto cuando: f( ) .2
. 2 2 En este caso queda:
k x( ),t t´ ...2 D d
0
cos( ). ( )t t´
2 2
Esta integral puede calcularse por muchos procedimientos, quedando: k x( ),t t´ .D e . t t´
(4) Numéricamente, el planteo del problema podría ser: 10 coeficiente f( ) .2
. 2 2 (5)
función densidad de la distribución de frecuencias
La integral de esta función dará la Función Distribución:
F( ) .2atan
Si en esta función se sustituye F() por rnd(1) y se despeja se puede tener un conjunto de valores que tengan la distribución (5).
j ..0 400 índice que dará el tamaño del vector formado Wj . tan .rnd( )1
2 vector
para verificar este hecho se construirá un histograma.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
16
n1 8 número de intervalos k2 ..0 n1 índice para generar n1 intervalos Max 100 m 0 Extremos del intervalo de análisis interk2 m .Max m
n1 k2
vector de intervalos h hist( ),inter W vector que cuenta las frecuencias en cada intervalo k1 ..0 n1 1 índice auxiliar ..,0 0.1 100
Como se puede observar, la distribución de los datos sigue perfectamente la
ecuación (5). Formando la matriz cuyas filas son valores de realización:
nr 100 Número de realizaciones i ..0 nr 1 índice que indica realización vr 90 Valores dentro de una realización k ..0 vr 1 índice que indica valores dentro de una realización tk .k 4 vector de valores de tiempo para evaluar X ,i k .Ui sin ..Wi
tk 180 .Vi cos ..Wi
tk 180
r ..9 12 índice para lograr 4 realizaciones en el siguiente gráfico

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
17
Calculando las medias de las 20 realizaciones en cada uno de los puntos de
definición, se encuentra la media de la función aleatoria. El vector M contiene las medias en cada punto considerado de la función aleatoria Mk mean < >X k
Del mismo modo se puede hallar la desviación standard punto por punto: Sk stdev < >X k
el vector S contiene las desviaciones standard en cada punto considerado de la función aleatoria Superponiendo la media y la desviación standard a las realizaciones, queda gráficamente:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
18
Para hallar la función de correlación, se procede del siguiente modo:
Cki
.< >X 0i
< >X ki
rows( )X El vector C contendrá, punto a punto, los valores de la función de correlación, que
según la teoría es una de tipo exponencial decreciente.
FUNCIONES ALEATORIAS ESTACIONARIAS
Generalmente se llama estacionarios a aquellos procesos y objetos cuyas características no dependen del tiempo de observación, es decir no cambian al decalar arbitrariamente el tiempo (son invariantes con respecto a cualquier decalaje del tiempo).
De acuerdo con lo dicho, se denomina ESTACIONARIA a una función aleatoria X(t) si determinadas características probabilísticas de la función de la función aleatoria X(t+), cualquiera sea , coincide idénticamente con las características correspondientes a X(t).
Es evidente que la esperanza matemática y la dispersión de la función aleatoria estacionaria son constantes y su función correlativa depende sólo de la diferencia de los argumentos t - t'.
En efecto, según la definición general de la estacionariedad, la esperanza matemática y la función correlativa de la función aleatoria X(t) satisfacen las condiciones:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
19
m x( )t m x( )t k x( ),t t´ k x( ),t t´ cualquiera sea Poniendo en la primera tse obtiene:
Poniendo en la segunda t'se obtiene:
k x( ),t t´ k x( ),t t´ 0 La dispersión de la función aleatoria X(t) es igual al valor de su función correlativa
cuando t = t'. Por eso, de lo anterior: D x( )t k x( ),t t k x( ),0 0 D x( )0 cte
Designando la función de una variable t - t' por kx(t-t') , se puede escribir:
k x( ),t t´ k x( )t t´ k x( ) donde t t ́ Ahora bien, si la función aleatoria X(t) es estacionaria, entonces, dondequiera que
se elija un intervalo de longitud dada en el eje de las variables independientes t, los valores de la función aleatoria X(t) tienen en los extremos de este intervalo un mismo momento de correlación kx().
Para todos los problemas prácticos en los que se trata sólo con momentos de los dos primeros órdenes (esperanzas matemáticas y funciones correlativas) basta la constancia de la esperanza matemática y la dependencia de la función de correlación sólo de la diferencia de los argumentos para considerar estacionaria a una función aleatoria.
Por eso, las funciones aleatorias cuyas esperanzas matemáticas son constantes y las funciones correlativas dependen sólo de la diferencia de argumentos se llaman estacionarias en el sentido amplio.
La estacionariedad en el sentido amplio representa el tipo más simple de estacionariedad.
Según la definición dada, la función aleatoria con esperanza matemática variable es no estacionaria incluso si la función de correlación de la misma depende sólo de la diferencia de los argumentos.. Sin embargo, tal estacionariedad es, evidentemente no esencial, puesto que la función aleatoria centrada X0(t) = X(t) - mx(t) es estacionaria siempre que la función correlativa de la función aleatoria X(t) dependa sólo de la diferencia de argumentos.
Como la función correlativa de cualquier función aleatoria es simétrica, es decir no cambia de valor al permutar los valores de los argumentos, entonces la función correlativa de una función aleatoria estacionaria satisface la condición:
Así pues, la función correlativa de una función aleatoria estacionaria es función par

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
20
de la diferencia de los argumentos. Por otro lado, de las propiedades de la función correlativa, aplicadas a funciones
aleatorias estacionarias:
k x( ) k x( )0 D x De modo que, la función correlativa de una función aleatoria estacionaria,
cualquiera sea , no puede ser en magnitud absoluta, mayor que su valor correspondiente en el origen de coordenadas. Ejemplos: 1) En el último ejemplo anterior, había una función correlativa dependiente sólo de la diferencia de argumentos, de la forma:
k x( ) .Dx e . donde t t ́
2) La función aleatoria:
X( )t .U sin( ). t .V cos( ). t
es estacionaria solamente en el caso cuando las dispersiones de las magnitudes aleatorias U y V son iguales. En el caso general de diferentes dispersiones de las magnitudes aleatorias U y V esta función aleatoria no es estacionaria.
Ahora bien, la oscilación armónica de cierta frecuencia, con amplitud y fase aleatorias representa en el caso general una función aleatoria no estacionaria y solo en el caso particular de ser iguales las dispersiones de los coeficientes aleatorios adjuntos al seno y coseno, es una función aleatoria estacionaria. 3) La función aleatoria:
X( )t .U sin( ). t .V cos( ). t es estacionaria cualquiera que sea la densidad de probabilidad de la frecuencia aleatoria de las oscilaciones f() puesto que su esperanza matemática es idénticamente igual a cero, mientras que la función correlativa, determinada por (4) depende sólo de la diferencia de argumentos. 4) Si:
m x( )t a .b t k x( ),t t´ .D e . ( )t t´
entonces la función aleatoria X(t) es no estacionaria. No obstante, esta no estacionariedad no es esencial, puesto que la correspondiente función aleatoria X0(t) es estacionaria.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
21
SEÑALES ALEATORIAS En forma general, una señal es una función de una variable, el tiempo. En el caso de las señales determinísticas, para cada instante de tiempo (variable independiente) existe un valor único de la función (variable dependiente). En cambio, si la señal es aleatoria, existe incertidumbre sobre el valor que tomará en cada instante. La función (o señal) puede ser real o compleja, sin embargo el tiempo siempre tendrá un valor real. Se pueden distinguir cuatro tipos: Señales Periódicas, Señales no Periódicas. Señales Determinísticas, Señales Aleatorias. Señales de Energía, Señales de Potencia. Señales Analógicas, Señales Digitales.
Las señales aleatorias son manifestaciones de procesos eléctricos aleatorios que ocurren en el tiempo. Si v(t) es una señal aleatoria, V es una variable aleatoria que representa los valores de v(t) en los tiempos de observación.
Una señal es de energía si y sólo si tiene una energía positiva y finita en todo el tiempo:
Ev∞T T
2
T2
tv t( )2dlim=
∞∞
tv t( )2 d= 0 Ev ∞ Una señal es de potencia si y sólo si tiene una potencia positiva y finita en todo el
tiempo:
Pv∞T
1T T
2
T2
tv t( )2d
lim= 0 Pv ∞
En general, las señales periódicas son señales determinísticas y de potencia y las señales aleatorias son señales no periódicas y de energía. Bajo ciertas condiciones, se denomina ergodicidad a una relación comprensible de manera intuitiva, entre los promedios estadísticos y los promedios de tiempo que serán obtenidos. Procesos Aleatorios
Una señal aleatoria es la manifestación de un proceso eléctrico aleatorio que tiene lugar en el tiempo. Estos procesos también se llaman procesos estocásticos. Cuando entra el tiempo en cuestión, la descripción completa de un proceso aleatorio se vuelve bastante complicada especialmente si las propiedades estadísticas cambian con el tiempo.
Pero muchos de los procesos aleatorios encontrados en los sistemas de comunicación tienen la propiedad de estacionariedad o incluso ergodicidad, lo que

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
22
conduce a relaciones más simples e intuitivas significativas entre propiedades estadísticas, promedios de tiempo y análisis espectral.
En teoría de la probabilidad, un proceso ergódico estacionario es un proceso estocástico que exhibe tanto estacionariedad como ergodicidad. En esencia, esto implica que el proceso aleatorio no va a cambiar sus propiedades estadísticas con el tiempo y que sus propiedades estadísticas (tales como la media teórica y la varianza del proceso) se pueden deducir a partir de una sola muestra suficientemente larga, (realización) del proceso.
La estacionariedad es una propiedad de un proceso aleatorio que garantiza que sus propiedades estadísticas, como la media, sus momentos y varianza, no van a cambiar con el tiempo. Un proceso estacionario es uno cuya distribución de probabilidad es la misma en todo momento. Se definen varios subtipos de estacionariedad: de primer orden, de segundo orden, de orden n, en sentido amplio y en sentido estricto.
Un proceso ergódico es uno que se ajusta al Teorema Ergódico. El teorema permite que el promedio de tiempo de un proceso conformado sea igual al promedio del ensamble. En la práctica esto significa que el muestreo estadístico se puede realizar en un instante a través de un grupo de procesos idénticos o el muestreado en el tiempo sobre un único proceso sin ningún cambio en el resultado de la medición.
Un ejemplo sencillo de una violación de la ergodicidad es un proceso de medición, el cual es la superposición de dos procesos subyacentes, cada uno con sus propias propiedades estadísticas. Aunque el proceso de medición puede ser estacionario en el largo plazo, no es apropiado considerar que la distribución muestreada sea el reflejo de un solo proceso (ergódica): el promedio de ensamble no tiene sentido.
En esta sección se presentan los conceptos y la descripción del proceso aleatorio y se establecen brevemente a continuación las condiciones implícitas para estacionariedad y ergodicidad. Promedios de Ensamble y funciones de correlación
Una variable aleatoria asigna los resultados de un experimento aleatorio en números X(s) a lo largo de la recta real. A continuación se incluye la variación de tiempo diciendo que: Un proceso aleatorio mapea los resultados experimentales en funciones reales del tiempo. La colección de funciones del tiempo se conocen como ensamble y cada miembro se llama función muestra o realización.
Se representarán los ensambles formalmente por v(t,s). Cuando el proceso en cuestión es eléctrico, las realizaciones son señales aleatorias.
Considérese, por ejemplo, el conjunto de las formas de onda de tensión generadas por el movimiento térmico de los electrones en un gran número de resistencias idénticas. El experimento subyacente podría ser: Elegir una resistencia al azar y observar la forma de onda a través de sus terminales.
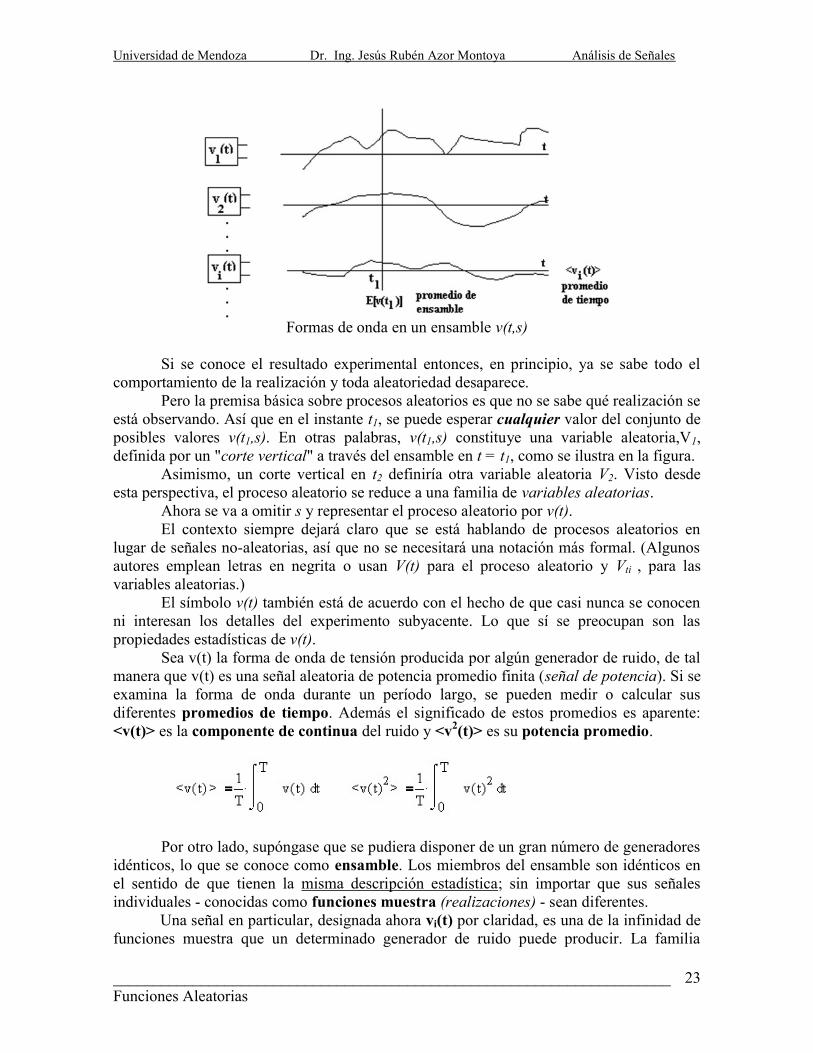
La siguiente figura muestra algunas de las señales aleatorias del conjunto v(t,s) asociado con este experimento. Un resultado en particular (o la elección de la resistencia) se corresponde con la i-ésima realización vi(t) = v(t1,si) teniendo el valor vi(t1) = v(t1,si) en el tiempo t= t1.
Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
23
Formas de onda en un ensamble v(t,s)
Si se conoce el resultado experimental entonces, en principio, ya se sabe todo el comportamiento de la realización y toda aleatoriedad desaparece.
Pero la premisa básica sobre procesos aleatorios es que no se sabe qué realización se está observando. Así que en el instante t1, se puede esperar cualquier valor del conjunto de posibles valores v(t1,s). En otras palabras, v(t1,s) constituye una variable aleatoria,V1, definida por un "corte vertical" a través del ensamble en t = t1, como se ilustra en la figura.
Asimismo, un corte vertical en t2 definiría otra variable aleatoria V2. Visto desde esta perspectiva, el proceso aleatorio se reduce a una familia de variables aleatorias.
Ahora se va a omitir s y representar el proceso aleatorio por v(t). El contexto siempre dejará claro que se está hablando de procesos aleatorios en
lugar de señales no-aleatorias, así que no se necesitará una notación más formal. (Algunos autores emplean letras en negrita o usan V(t) para el proceso aleatorio y Vti , para las variables aleatorias.)
El símbolo v(t) también está de acuerdo con el hecho de que casi nunca se conocen ni interesan los detalles del experimento subyacente. Lo que sí se preocupan son las propiedades estadísticas de v(t). Sea v(t) la forma de onda de tensión producida por algún generador de ruido, de tal manera que v(t) es una señal aleatoria de potencia promedio finita (señal de potencia). Si se examina la forma de onda durante un período largo, se pueden medir o calcular sus diferentes promedios de tiempo. Además el significado de estos promedios es aparente: <v(t)> es la componente de continua del ruido y <v2(t)> es su potencia promedio.
Por otro lado, supóngase que se pudiera disponer de un gran número de generadores idénticos, lo que se conoce como ensamble. Los miembros del ensamble son idénticos en el sentido de que tienen la misma descripción estadística; sin importar que sus señales individuales - conocidas como funciones muestra (realizaciones) - sean diferentes.
Una señal en particular, designada ahora vi(t) por claridad, es una de la infinidad de funciones muestra que un determinado generador de ruido puede producir. La familia

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
24
completa de funciones muestra se simbolizará con v(t). En la figura se puede apreciar las dos clases de promedios que se pueden hallar: 1) Se pueden efectuar mediciones sucesivas en una realización vi(t) para encontrar sus
promedios de tiempo <vi (t)> 2) Se pueden examinar todas las funciones muestra durante un tiempo particular, por
ejemplo t1, y encontrar los promedios de ensamble E[v(t1)]. Obviamente, para una función estacionaria, los promedios de ensamble son los
mismos que los promedios estadísticos en t= t1. En general, los promedios de ensamble pueden diferir de los promedios de tiempo. Esto ocurre cuando las propiedades estadísticas de los generadores varían en el tiempo, ya que la variación en el tiempo sería promediada en el tiempo y no en el ensamble. Sin embargo, muchas de las señales aleatorias en sistemas de comunicaciones provienen de procesos ergódicos, significando esto que los promedios de tiempo y de ensamble son idénticos. O sea, E[v(t)] = < v(t)>. Un proceso ergódico es también estacionario puesto que los promedios de ensamble son independientes del tiempo de observación. En lo sucesivo se tratará con señales aleatorias que son funciones muestra de procesos ergódicos. Por lo que estas señales son de potencia, ya que E[v2(t)] no depende de t, y se pueden hacer los siguientes enunciados: 1) El valor medio v es la componente de continua (CD) de la señal. 2) El valor medio al cuadrado es la potencia de la componente de continua, potencia de CD. 3) El valor cuadrado medio es la potencia promedio total. 4) La varianza v2 es la potencia de la componente variando con el tiempo, es decir, la potencia de CA.
O bien
5) La desviación standard v es la raíz cuadrática media (valor eficaz) de la componente variando con el tiempo, es decir, el valor rms. Las relaciones anteriores sólo se aplican a fuentes ergódicas.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
25
CORRELACION La Función de Autocorrelación, como se vio anteriormente, estaba dada por:
Rv t t´,( ) E v t( ) v t´( )( )= Siendo v(t) una función aleatoria. Además, si la función es estacionaria, Rv depende
del lag (diferencia) = t – t’. Reemplazando en la expresión anterior, queda: Rv τ( ) E v t( ) v t τ+( )( )= El promedio de tiempo que implica la esperanza matemática se pude indicar como:
Rv τ( )∞T
12 T T
Ttv t( ) v t τ+( ) dlim=
Dos son los motivos para considerar la función de autocorrelación de una señal aleatoria: 1) a Rv() le corresponde proporcionar información útil acerca de v(t). 2) según el teorema de Wiener-Kinchine, la descripción del dominio de la frecuencia de una señal aleatoria es su densidad espectral de potencia Gv(f) = F[Rv()]. Se debe notar que Rv() es una función determinística aún cuando v(t) es aleatoria. Para tales procesos la función de autocorrelación exhibe las siguientes propiedades:
La primera propiedad muestra que Rv() está limitada por su valor en el origen,
mientras que la tercera propiedad establece que este límite es igual al valor medio cuadrado llamado potencia promedio total ( ) en el proceso. La segunda propiedad indica que la función autocorrelación tiene simetría par.
Además se verifica que:
dado que la variables aleatoria v(t) es incorrelacionada consigo misma cuando el lag es muy grande, lo que lleva a que v2 =0.
En el caso en que el proceso no sea periódico, de serlo su autocorrelación también es periódica con el mismo período.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
26
Ejemplo 1: Dada la función de autocorrelación para un proceso estacionario:
Rv τ( ) 25 41 6 τ2++=
encontrar el valor medio y la varianza del proceso v(t).
Dado que:
v 2
∞τ25 4
1 6 τ2++lim= 25=
Luego La varianza está dada por:
Potencia promedio total=E[v2(t)] = Rv(0) = 25 + 4 = 29
luego: 2v = 29 – 25 = 4 Ejemplo 2: Sinusoide en fase aleatoria
Supóngase que se tiene un oscilador seteado en alguna amplitud no-aleatoria A y frecuencia , pero no se sabe el ángulo de fase hasta encender el oscilador y observar la forma de onda. Esta situación puede verse como un experimento en el que se tiene que elegir un oscilador al azar desde una gran colección con la misma amplitud y frecuencia pero no hay sincronización de fase. Un oscilador particular que tiene ángulo de fase i genera como realizaciones sinusoides vi(t) = A cos (0t + i), y el ensamble de sinusoides constituye un proceso aleatorio definido por
v(t) = A.cos(0.t + ) =2..f
A y 0 son constantes y es una variable aleatoria con densidad de probabilidad
uniforme con valores comprendidos entre 0 y 2. El siguiente segmento en Matlab crea una arreglo de M=100 filas y N=1000 columnas que simulan (en forma aproximada) a la señal aleatoria. Luego, grafica tres realizaciones. M=100;N=1000;A=2;w0=3; i=1:N;G=rand(1,M);gamma=2*pi*G; for i=1:M, for j=1:N,

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
27
v(i,j)=A*sin(2*pi*(j-1)*w0/N+gamma(i)); end end j=1:N;plot(j,v(1,j),j,v(20,j),j,v(35,j))
Según la teoría:
).0cos(.)( + tAtv )]).(0cos[.)( +++ tAtv )]}).(0cos[.)..0cos(.{)]().([ ++++ tAtAEtvtvE ]}).0.0cos[.)..0cos(.{)( +++ tAtAERv )]}.0cos().2.0.0.2.[cos({)( 2
2 +++ tER Av
Aplicando propiedad distributiva de la esperanza respecto de la suma )]}.0[cos()].2.0.0.2[cos({)( 2
2 EtER Av +++ y el primer término resulta nulo al promediar respecto del tiempo. Luego
R v( ) .A22 cos( ).0
Para hallar la función de correlación desde la simulación, se procede del siguiente modo (agregando al anterior segmento de Matlab): for j=1:N, C(j)=sum(v(:,1).*v(:,j))/M; end j=1:N;Corr(j)=(A^2)/2*cos(2*pi*(j-1)*w0/N); plot(j,C,j,Corr)
En el gráfico de salida se pueden observar la autocorrelación obtenida mediante la
simulación y la teórica (esperada).

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
28
Ejemplo 3: Dada una variable aleatoria A, uniformemente distribuida sobre [0, 1) se construye una señal aleatoria v(t) = A.sin(ωot). Encontrar la función de autocorrelación.
).0cos(.)( tAtv )].(0cos[.)( ++ tAtv )]}.(0cos[.)..0cos(.{)]().([ ++ tAtAEtvtvE )]}.0.0cos[.)..0cos(.{)]().([ ++ tAtAEtvtvE )]}.0.0.0cos().0.0.0.[cos({)]().([ 2
2 ++++ ttttEtvtvE A )]}.0cos().0.0.2].[cos([)]().([ 2
2 +++ tEtvtvE A )]}.0cos().0.0.2.[cos({)]().([ 2
2 +++ tEtvtvE A
Como se puede apreciar, la función de autocorrelación no es sólo función de , sino
que también depende de t. Luego el proceso es no estacionario y sus características estadísticas variarán con t. En la siguiente simulación con Mathcad, se puede apreciar cómo coinciden los resultados “experimentales” y los teóricos.
En el próximo gráfico se ven dos realizaciones.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
29
Ejemplo 4: Dada la función v(t) = a.t +Y, con Y variable aleatoria [0,1) y a= cte. La media se halla del siguiente modo: mv (t) = E[v(t)] = E[a.t] + E[Y] = a.t + ½ La autocorrelación Rv (t1,t2) = E[v(t1). v(t2)] = E[(a.t 1+Y). (a. t2 +Y)] Rv (t1,t2) = E[a.t1. a.t2] + E[a.t1. Y] + E[Y. a.t2] + E[Y.Y] Rv (t1,t2) = a2.E[t1.t2] + a.t1.E[Y] + a.t2.E[Y] + E[Y2] Rv (t1,t2) = a2. t1.t2 + ½.a.(t1+t2) + 1/3 La autocovarianza Cv (t1,t2) = E[(v(t1) - mv (t1)). (v(t2) - mv (t2))] Cv (t1,t2) = E[(v(t1).v(t2)] – E[v(t1).mv (t2)] - E[v(t2).mv (t1)] + E[mv (t1).mv (t2)] Cv (t1,t2) = a2. t1.t2 + ½.a.(t1+t2) + 1/3 - a.t - (a.t1+1/2). (a.t2+1/2) Cv (t1,t2) = a2. t1.t2 + ½.a.(t1+t2) + 1/3 - a.t - a2. t1.t2 - 1/2.a.(t1+t2) -1/4 Cv (t1,t2) = 1/3 – ¼ =1/12

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
30
La varianza: v 2 = Cv (t,t) = 1/12 Valor cuadrático medio: E[v(t)2] = Rv (t,t) = a2. t2 + a.t + 1/3
Una simulación a través de Mathcad coorobora lo expresado anteriormente.
Una de las funciones muestras (realización)
Comportamiento de la media
N 500 i 0 N 1 Cantidad de funciones muestra n 100 j 0 n 1 Valores en cada función muestra a 10
500 constante X i j, a j rnd 1( )+ Función aleatoria
Mj mean X( ) j Media experimental y j a j 0.5+ Media teórica
RxjX( ) 40 X( ) j
rows X( ) t1 40 Autocorrelación experimental
rj a2 t1 j 12 a t1 j+( )+ 1
3+ Autocorrelación teórica

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
31
Comportamiento de la autocorrelación
Comportamiento de la autocovarianza
Comportamiento del valor medio cuadrático
CxjX( ) 40 M40 X( ) j M j
rows X( ) Autocovarianza experimental
rmsjX j X j rows X( ) Valor Cuadrático Medio experimental
RMS j a2 j2 a j+ 13+ Valor Cuadrático Medio teórico

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
32
Teorema de Wiener-Khintchine-Einstein Para un proceso aleatorio estacionario en sentido amplio (WSS) X(t) cuya función
de autocorrelación está dada por RXX(τ ), la Densidad Espectral de Potencia (PSD) del proceso es:
Sxx f( ) F Rxx τ( ) =∞
∞
τRxx τ( ) e j 2 π f τ d= En otras palabras, la función de autocorrelación y la densidad espectral de potencia
forman un par transformado de Fourier. Si bien la mayoría de los procesos aleatorios que se que han considerado son WSS,
para aquellos que no lo son, el citado Teorema necesita ser ajustado ya que la función de autocorrelación para un proceso no estacionario será una función de dos variables.
Para los procesos no estacionarios se escribe el teorema de Wiener-Khintchine-Einstein como:
donde en este caso <> representa un promedio de tiempo con respecto a la variable t. Ejemplo 5: Se considerará el proceso aleatorio senoidal del Ejemplo 2, v(t) = A sin(ωot + ). La función PSD se puede calcular a partir de la Transformada de Fourier de la Función de Autocorrelación hallada en esa oportunidad.
Resultando una densidad espectral de potencia del tipo impulsivo. G v( )t .A2
4 ( )f f0 .A24 ( )f f0
Si a la correspondiente función de autocorrelación del proceso simulado con Mathcad, se le determina la Transformada de Fourier y se grafica, se puede apreciar la concordancia con los resultados teóricos.
N 500 i 0 N 1 Cantidad de funciones muestra n 128 j 0 n 1 Valores en cada función muestra i 2 rnd 1( ) 0.5( ) Fase (variable aleatoria) A 10 Amplitud (constante)

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
33
aquí se pueden apreciar los dos impulsos (de amplitud A2/4) ubicados en f0 = y f0 = - .
Esta señal aleatoria tiene cantidades específicas de potencia promedio concentradas en f = f0 y f = - f0 y no hay densidad espectral en ninguna otra parte.
Además:
d
fG v( )f A22 v2
que se ve que es igual a la potencia promedio total.
Xi j, A sin 2 jn
20i+
Función aleatoria
CxjX( ) 0 M0 X( ) j M j
rows X( ) Autocovarianza experimental
Autocorrelación experimental RxjX( ) 0 X( ) j
rows X( )
FC 1n cfft Rx( ) fft de la función de autocorrelación

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
34
v2 .1T d
0T
tv( )t 2 .1T d
0T
t( ).A cos( ).0 t 2 Para hallar este valor, no hay problema de considerar = 0 y T = 2.. El valor
subintegral es:
F( )t ...1
2 cos( ).0 t sin( ).0 t ..12 0 t
0 A2 Luego el valor buscado es: v2 .1
.2 ( )F( ).2 F( )0 A22
Por último, el hecho que no hay impulso en f = 0 concuerda con: v .1
T d0T
tv( )t .1T d
0T
t.A cos( ).0 t 0
Para una Secuencia Discreta la densidad espectral de potencia (PSD) se define en el dominio z como sigue
Sx z( )
mRxm z m
Si se muestrea un proceso aleatorio estacionario uniformemente se obtiene una secuencia aleatoria estacionaria. El Teorema del Muestreo es válido en términos de PSD: Ejemplo 6: Dada la función de autocorrelación
Con a > 0
Hallar la PSD Sx()
Haciendo z = ej
Rxm a m

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
35
RUIDO Y SU FILTRADO - Ruido Térmico
Lo común es tratar con tensiones de ruido provenientes del movimiento aleatorio de partículas cargadas (por lo general electrones) en medios conductores. El mismo fue identificado por Jonson en 1928.
Este movimiento da lugar a una corriente aleatoria y debido a ella, en bornes de una resistencia aparece una tensión de ruido v(t).
La tensión v(t) es una variable aleatoria gaussiana, que se indicará como vn. La probabilidad de que tome un valor determinado viene dada por la expresión
2
22
)(21 exp)(
nn vvnvp
donde v n es el valor medio y 2 la varianza.
El valor medio de la tensión de ruido es siempre nulo, pero no su valor eficaz. La formula anterior no es práctica para calcular el valor eficaz, hay una manera más fácil: utilizar la densidad espectral de potencia, es decir, la potencia por unidad de frecuencia.
Según la teoría cinética, la energía promedio de una partícula a la temperatura absoluta es proporcional a k. siendo k la constante de Boltzmann.

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
36
Se esperan así valores de ruido térmico que incluyan el producto k. En síntesis, se obtendrá una medida de la potencia de ruido en términos de temperatura.
Cuando una resistencia metálica se encuentra a la temperatura , existe una tensión aleatoria v(t) producida en los terminales a circuito abierto a causa del movimiento aleatorio de los electrones.
De acuerdo al Teorema Central del Límite, v(t) tiene una distribución Gaussiana con media igual a cero y varianza:
v2 v2 ..2 ( ).. k 2
.3 h R
en volts2 donde:
k .1.37 10 23 constante de Boltzmann (en J / ºK) h .6.62 10 34 constante de Planck (en J . seg)
y en grados Kelvin ( ºK ). La presencia de h indica un resultado de mecánica cuántica. Se demuestra en mecánica cuántica que la densidad espectral del ruido térmico
es:
G v( )f ...2 R h fexp .h f
.k 1
en volt2 / Hz
Para f = 0 se presenta una indeterminación de la forma "0/0", para salvarla se aplica
L´Hoppital:
Para representar gráficamente esta función (para frecuencia positivas) se reúne el exponente del denominador en una variable x:
la densidad espectral de potencia en términos de x, queda:
Resultando:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
37
donde se ve que para x=0.1, la densidad espectral de potencia ha caído aproximadamente un 5% respecto del valor en x=0 (máximo). Si se considera la Temperatura de Salón o Temperatura Normal a:
0 .290 K (grados Kelvin o 17 grados Celsius) así:
=.k 0 3.973 10 21 sec watt aproximadamente 4*10-21 w-seg.
Entonces si la resistencia está en 0, Gv(f) es constante de manera esencial para:
0.1 h f
k ψ0= f 0.1 k ψ0h 6.002 1011
Pero este límite superior cae en la porción infraroja del espectro electromagnético, más arriba del punto donde los componentes eléctricos dejan de responder.
Luego, se puede decir que: La densidad espectral de ruido térmico es CONSTANTE.
G v( )f ...2 R k (en volt2 / Hz) Aplicando Thevenin, si R se reemplaza por una resistencia sin ruido de valor R y al
ruido se lo indica por un generador de tensión:
El sombreado se debe a que la fuente es no convencional. Sea una fuente convencional con una impedancia Zs = Rs + j Xs y sea vs la tensión

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
38
a circuito abierto.
Esto es si la carga está acoplada de tal manera que ZL es el conjugado de Zs. La tensión en terminales vale vs / 2 y la potencia disponible es:
Para el caso del resistor térmico visto como fuente de ruido:
Por comparación la densidad espectral disponible en la resistencia de carga es
Ga = 2 R k /4 R = k ψ/2 [w/Hz]
Por lo tanto un resistor térmico entrega una densidad de potencia máxima de k./2 [w/Hz] a una carga adaptada sin importar el valor de R. RUIDO BLANCO Y TEMPERATURA DE RUIDO
Además de los resistores térmicos, hay otros tipos de fuentes que tienen densidad espectral plana sobre un amplio intervalo de frecuencias.
Tal espectro tiene todos los componentes de frecuencia en igual proporción y se lo designa Ruido Blanco. La densidad espectral de ruido blanco se exhibe en general como:
G( )f 2
donde η representa una densidad constante en la notación estándar. El factor 1/2 se incluye para que asocie la mitad de la potencia con la frecuencia positiva y la otra mitad con la negativa. En otras palabras, R.k. es la densidad espectral de potencia de frecuencia

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
39
positiva.
Puesto que se conoce G(f), la función de autocorrelación se obtiene aplicando la
Transformada Inversa de Fourier a la misma.
R( ) d
f.2 e ..j .2 d
fe ..j .2 ( )
(1)
Se observa que R(≠ 0) = 0. De modo que dos muestras diferentes cualesquiera de
una señal de ruido blanco Gaussiano son no correlacionadas y por lo tanto estadísticamente independientes.
El valor de depende de dos factores:
a) el tipo de fuente de ruido b) el tipo de densidad espectral, es decir la tensión cuadrática media, la corriente
cuadrática media o la potencia disponible. Si la fuente es un resistor térmico, entonces las densidades tensión media cuadrática y corriente media cuadrática son:
ηv = 4.R.k.ηi = 4.k.R
donde el tipo de densidad espectral se indica por medio de subíndices.. Además, cualquier tipo de fuente de ruido térmico tiene por la definición la densidad espectral de ruido one-sided disponible 2Ga(f) = k .
Otras fuentes de ruido blanco no térmicas, en el sentido de la potencia disponible, no están relacionadas con la temperatura física. Sin embargo, se puede hablar de la temperatura de ruido N de cualquier fuente de ruido blanco térmico o no térmico por medio de la definición:
N
.2 G 0( )fk
0k
donde 0/2 es la máxima potencia de ruido que la fuente puede entregar por unidad de frecuencia.
Entonces, dada una temperatura de ruido de fuente = k .N (donde N no es

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
40
necesariamente una temperatura física). Por ejemplo, ciertos generadores de ruido electrónico tienen N = 10.0 = 3000 ºK
(2727 ºC) pero es obvio que los dispositivos no pueden estar a estas temperaturas. RUIDO BLANCO FILTRADO
El modelo de ruido blanco resulta razonable siempre y cuando se lo relacione con la salida de un filtro y la densidad espectral sea más o menos constante sobre la banda de paso, una situación muy común en los sistemas de comunicación. Para el estudio del ruido blanco filtrado - o filtrado de señales aleatorias en general - la relación de espectros de potencia de entrada y salida:
G y( )f .( )H( )f 2 G x( )f
es una herramienta básica, donde H(f) es la función de transferencia del filtro. Así, si la entrada a un sistema lineal invariante en el tiempo, es la señal x(t), la salida será una señal aleatoria y(t) con Gy(f) como en la ecuación anterior, y
R y( ) d
f..( )H( )f 2 G x( )f e ..j
Se supone, por consiguiente, que x(t) proviene de un proceso ergódico, en cuyo caso también y(t) será ergódico.
Para ilustrar, si el ruido blanco es la entrada de un filtro pasabajos ideal de ganancia unitaria y de ancho de banda B, entonces:
el espectro de potencia de salida es, de esta manera, una función rectangular y la autocorrelación de la salida es una función sinc, de manera específica:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
41
Una simulación de este proceso se logra a través Matlab: N=10000;M=100;R=randn(M,N);pivote=500;B=50; for j=1:N, C(j)=sum(R(:,pivote).*R(:,j))/M; end G=abs(fft(C)); % densidad espectral de potencia i=B:N-B;G(i)=0; % Filtrado paso-bajo P=abs(ifft(G)); % Funcion de autocorrelacion j=1:N;plot(P(1:500))
Una simulación de este proceso se logra a través Mathcad
N 5000 Número de realizaciones M 100 Número de muestras por realización i 0 M 1 j 0 N 1 índices B 50 ancho de banda R i j, rnd 1( ) 0.5 matriz N x M de ruido blanco (μ=0)
CjR( ) 0 R( ) j
M Función de auto correlación
G cfft C( ) rows C( ) Densidad espectral de potencia Pj if B
2 j N B2 0, Gj, Filtrado paso-bajo
T icfft P( ) rows P( ) Función de autocorrelación del ruido filtrado
0 100 200 3000
10
20
30
Tj
j

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
42
Como se evidencia en la figura, el proceso de filtrado ha dado a lugar a tres cosas:
1) El espectro de potencia no es mayor que el blanco, aunque es constante sobre un intervalo finito de frecuencia.
2) La potencia de salida es finita. En efecto: y2 . B 3) La señal de potencia de salida está incorrelacionada a intervalos aproximados 1/(2.B).
Aunque las conclusiones anteriores tuvieron como base los filtros paso-bajo ideales, se obtienen resultados similares con cualquier filtro real. Se debe notar en forma particular, que el espectro del ruido blanco filtrado se mezcla con el contorno de |H(f)|2. Puesto que el espectro resultante no es mayor que el blanco, al ruido blanco filtrado se lo llama a menudo ruido coloreado.
También sería deseable conocer la descripción probabilística de la señal filtrada, esto es su función de densidad de probabilidad, y de esta observación obtener tanto buenas como malas noticias. Las malas noticias son estas: no hay reglas generales que relacionen a las funciones densidad de probabilidad de entrada y salida, salvo para un caso especial. En este caso especial están las buenas noticias, a saber:
Si la entrada a un sistema lineal invariante en el tiempo, es una señal aleatoria Gaussiana, entonces la salida también es Gaussiana.
Esto proviene del hecho de que cualquier transformación lineal de una variada Gaussiana conduce a otra variada Gaussiana. Pueden cambiarse los promedios estadísticos, pero no el modelo de probabilidad.
Se considera en este caso como una buena noticia, simplemente porque el modelo Gaussiano es válido para muchas (pero no todas) las señales aleatorias que hay en la ingeniería de comunicación. EJEMPLO: RUIDO TERMICO EN UN CIRCUITO RC
Para resumir varios de los temas tratados hasta aquí, se considerará el circuito RC de la figura de la derecha, donde el resistor está a la temperatura

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
43
Sustituyendo este resistor por su modelo de Thevenin, se llega a la figura de la derecha, que es una fuente de ruido blanco con Gx(f) = 2.R.k. [V2/Hz] aplicada a un filtro pasa-bajo RC sin ruido.
Puesto que:
la densidad espectral de salida es:
G y( )f .( )H( )f 2 G x( )f ...2 R k 1 f
B2
con B 1...2 R C
y la autocorrelación de y(t) [antitransformada de Fourier de Gy(f) ] es:
R y( ) ......2 R k B e ...2 B ..k C e
.R C
Gy(f) y Ry() se ven en el siguiente gráfico:
Y ( )1
j C( )R 1
j C( )+X ( ) H f( ) Y f( )
X f( )
1j 2 f C( )
R 1j 2 f C( )+
H f( ) 11 j 2 f C R+ B 1
2 R C
H f( ) 11 j f
B+ H f( ) 1 f
B
2+
12

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
44
La figura de la derecha muestra que el intervalo sobre el que el ruido filtrado tiene una correlación apreciable es aproximadamente igual a la constante de tiempo, RC, del circuito, como se podría sospechar.
Se puede decir además que y(t) es una señal aleatoria gaussiana con y 0 es decir sin componente de CD, puesto que x(t) es gaussiana con valor medio 0, y:
y2 R y( )0 .k
C Como se puede apreciar, este último valor depende de C pero no de R, aunque la
fuente de ruido es el resistor térmico. Si el resistor térmico está a la temperatura ambiente 0 y C = 0.1 F; entonces: k .1.37 10 23 0 290 C .0.1 10 6
=.k 0C 3.973 10 14
y2 .4 10 14 [V2]
Luego, la tensión de salida rms es y = 2.10-7 = 0.2 V . Estos valores excesivamente pequeños son característicos en ruido térmico, lo cual
explica porqué no se nota en situaciones ordinarias. Sin embargo, si la señal recibida en un sistema de comunicación de larga distancia, puede ser del mismo orden de magnitud o incluso menor, lo cual muestra por qué un ruido térmico es una limitación fundamental en la comunicación eléctrica.
Simulando con Mathcad:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
45
Función densidad espectral
Función de autocorrelación ANCHO DE BANDA EQUIVALENTE DE RUIDO
El ruido blanco filtrado por lo general tiene potencia finita. Para enfatizar esta propiedad, se designa a la potencia de ruido promedio con:
N y2 d
f.( )H( )f 2
2 . d0
f( )H( )f 2
Haciéndose notar que la integral depende sólo de la función de transferencia del filtro, por lo que se puede simplificar el análisis de la potencia del ruido definiendo un ancho de banda equivalente de ruido, BN, como:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
46
B N .1 d
0
f( )H( )f 2 donde:
12 ( )H( )f max
es la relación de amplitudes de frecuencia central, es decir la ganancia de tensión. (Esta definición supone que el filtro tiene una frecuencia central significativa). Por lo tanto la potencia de ruido filtrado es:
N .. B N El examen de esta ecuación muestra que el efecto del filtro se ha separado en dos
partes: la selectividad de frecuencia relativa, descripta por medio de BN y la ganancia de potencia (o atenuación), representada por medio de .
En la siguiente figura se ilustra para un filtro pasabanda, que BN es igual al ancho de banda de un filto rectangular ideal que permitiera el paso de tanta potencia de ruido blanco como el filtro en cuestión, siendo iguales sus ganancias máximas.
Por definición, el ancho de banda equivalente de ruido de un filtro ideal es su ancho de banda real. Para filtros prácticos, BN es algo mayor que el ancho de banda a 3 dB; por ejemplo, un filtro pasa-bajos RC tienen BN = 2..B donde BN es aproximadamente 50% mayor que B. Sin embargo, como el filtro resulta ser más selectivo (con características de corte agudo), su ancho de banda de ruido se aproxima al ancho de banda a 3 dB, y para muchas aplicaciones no está muy lejos de la realidad considerarlos iguales.
Resumiendo, si y(t) es un ruido blanco filtrado de valor medio cero, entonces: y 0 y2 y2 N .. B N y N .. B N Esto significa que dada una fuente de ruido blanco, un medidor de potencia
promedio (o un medidor de tensión rms) acusará una lectura:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
47
donde BN es el ancho de banda equivalente de ruido del medidor mismo. Despejando, la densidad de potencia de la fuente se puede deducir por medio de:
siempre y cuando se esté seguro que el ruido es en realidad blanco dentro del intervalo de respuesta de frecuencia del medidor.
EJEMPLO: ANCHO DE BANDA EQUIVALENTE DE RUIDO DE UN FILTRO PASABAJOS RC
Volviendo al filtro pasabajos RC del ejemplo anterior, la frecuencia central del filtro es f=0. Así:
( )H( )0 2 1
La razón de por qué y2 R y( )0 .k
C en el ejemplo anterior es independiente de R resulta ahora aparente si se escribe:
Así, cuando aumenta R aumenta la densidad de ruido (como debe ser) pero disminuye el ancho de banda del ruido BN. Estos dos efectos se cancelan uno al otro en forma precisa, de modo que:
y2 .k
C RUIDO BLANCO Y MEDICIONES DE FILTRO
Dado que el ruido blanco contiene todas las frecuencia en igual proporción, resulta
Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
48
una señal conveniente para mediciones de filtros y para trabajo de diseño experimental.
En consecuencia, las fuentes de ruido blanco con densidad de potencia calibrada han
venido a ser instrumentos del laboratorio standard. A continuación se analizarán algunas de las mediciones que se pueden hacer con estas fuentes. Ancho de Banda Equivalente de Ruido - Supóngase que se conoce la ganancia de un amplificador y se desea conocer su ancho de banda equivalente de ruido. Para hacerlo, se aplica ruido blanco a la entrada y se mide la potencia de salida promedio con un medidor cuya respuesta de frecuencia sea constante de manera esencial dentro de la banda de paso del amplificador. El ancho de banda de ruido será entonces:
B N N.
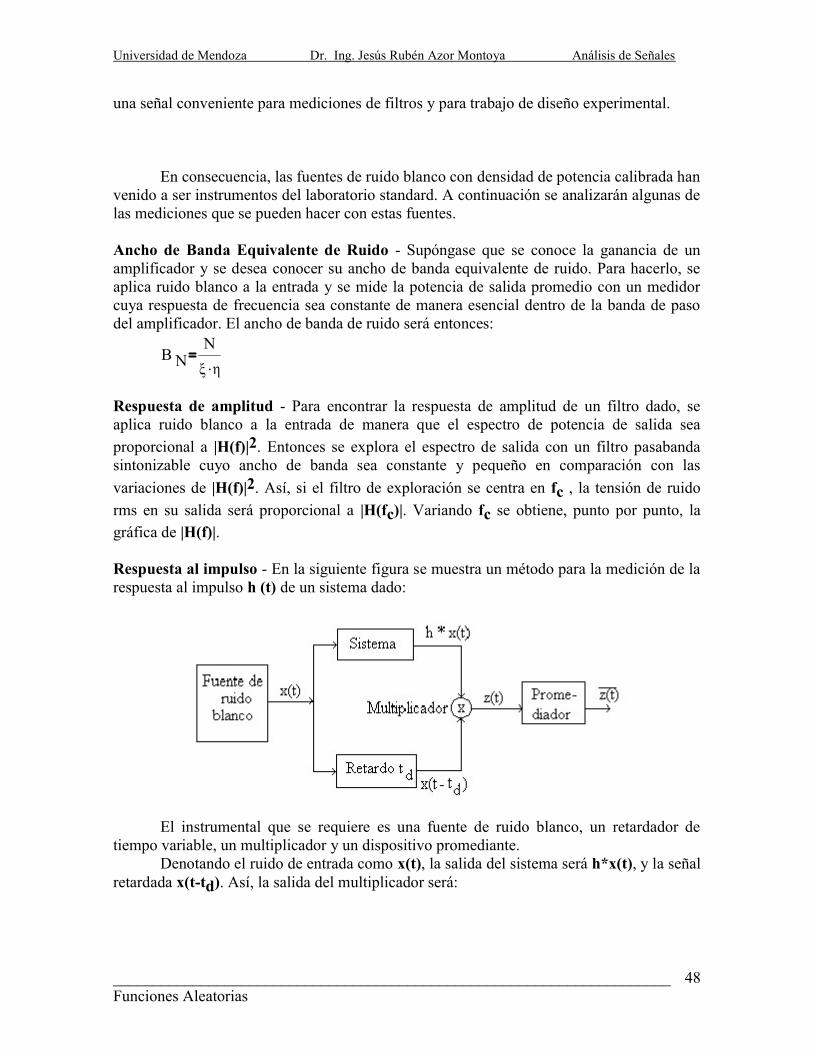
Respuesta de amplitud - Para encontrar la respuesta de amplitud de un filtro dado, se aplica ruido blanco a la entrada de manera que el espectro de potencia de salida sea proporcional a |H(f)|2. Entonces se explora el espectro de salida con un filtro pasabanda sintonizable cuyo ancho de banda sea constante y pequeño en comparación con las variaciones de |H(f)|2. Así, si el filtro de exploración se centra en fc , la tensión de ruido rms en su salida será proporcional a |H(fc)|. Variando fc se obtiene, punto por punto, la gráfica de |H(f)|. Respuesta al impulso - En la siguiente figura se muestra un método para la medición de la respuesta al impulso h (t) de un sistema dado:
El instrumental que se requiere es una fuente de ruido blanco, un retardador de
tiempo variable, un multiplicador y un dispositivo promediante. Denotando el ruido de entrada como x(t), la salida del sistema será h*x(t), y la señal
retardada x(t-td). Así, la salida del multiplicador será:

Universidad de Mendoza Dr. Ing. Jesús Rubén Azor Montoya Análisis de Señales
______________________________________________________________________ Funciones Aleatorias
49
z( )t .x t td ( ).h x( )t .x t td d
.h( ) x( )t
Pero, con x(t) que es el ruido blanco, la ecuación (1) dice que:
R v( ) .f0 G v( )0 ..2 f0= 1
m.G v .m f0 cos ..m o
por lo tanto, h(t) se mide por medio de la variación del retardo de tiempo td.
Se puede cuestionar lo práctico de este método, en forma particular, puesto que h(t) se puede obtener inmediatamente con la aplicación de un impulso (o un pulso breve e intenso) al sistema. En tanto esta sea una conclusión válida para muchas mediciones de filtros, hay muchos sistemas, tales como el procesamiento industrial y sistemas de control, para los cuales no se puede dar una entrada impulsiva, o si se hace, podría dañar o destruir al sistema.