capit18.pdf
TRANSCRIPT

18. Sistemi integrabili
I sistemi integrabili costituiscono un capitolo fondamentale della dinamica hamiltoniana,perche la legge del moto e riconducibile a quadrature. Genericamente il moto e quasiperiodico, cioe ogni coordinata e esprimibile come sovrapposizione di moti armonici confrequenze indipendenti. Esiste inoltre un sistema di coordinate normali, in cui il motodi ciascun piano di fase e periodico poiche corrisponde ad una rotazione uniforme, ed equindi descrivibile tramite una azione costante ed un angolo che varia linearmente con t.Le frequenze di questi moti non sono costanti ma dipendono in generale dalle condizioniiniziali; questo li differenzia dai sistemi lineari come gli oscillatori armonici, per i quali lefrequenze sono fisse. La dipendenza delle frequenze dalle condizioni iniziali e quindi dallaampiezza delle oscillazioni e tipica dei sistemi non lineari. Un sistema integrabile ha dintegrali primi indipendenti, i cui flussi commutano tra loro e con quello dell’hamiltoniana;queste proprieta intrinseche caratterizzano il sistema. Nelle coordinate normali il motoconsiste in rotazioni uniformi su d cerchi o traslazioni uniformi su d tori unidimensionali.La natura di una traslazione sul toro T
d dipende dalle proprieta aritmetiche delle frequenzee varia quindi con la condizione iniziale. Se le frequenze sono razionalmente indipendentil’orbita e densa sul toro T
d, se sono tutte in rapporto razionale l’orbita e chiusa. Ingenerale se r combinazioni lineari delle frequenze a coefficienti interi si annullano l’orbita edensa su T
d−r. Dall’ordine r di risonanza dipende il cambiamento delle orbite per piccoleperturbazioni, poiche il toro T
d−r sopravvive seppure deformato. Per sistemi con d = 2, 3gradi di liberta la geometria delle orbite emerge considerando la sezione dell’orbita con uniperpiano e la successiva proiezione in uno spazio delle fasi di dimensione 2(d−1). L’orbitain questo spazio e una successione di punti e l’applicazione che li genera e detta mappa diPoincare.

354 18. Sistemi integrabili c©88-08- 9820
18.1. EVOLUZIONE DEI SISTEMI INTEGRABILI
Si dicono integrabili quei sistemi per i quali esiste un sistema di coordinate canonicheangolo θ e azione nelle quali l’hamiltoniana assume la forma H = H(). L’indipendenzadi H dagli angoli determina una evoluzione temporale semplice. Detto ω = ∂H/∂ si ha
θ(t) = θ(0) + ω()t, (t) = (0) (18.1.1)
Ogni angolo θi si puo scrivere nella forma θi = θ′i +2π ni dove ni e un intero e 0 ≤ θ′ < 2π.
E spesso usata la seguente notazione θ′i = θi mod2π. Il vettore ω ha come componentile frequenze ωi che caratterizzano il moto periodico di ciascun grado di liberta. Infatti seTi indica la periodicita del moto sul toro unidimensionale da θ′i(t + Ti) = θ′i(t) segue cheTi = 2π/ωi. Le azioni costituiscono d integrali primi del moto indipendenti i cui flussicommutano.Come esempio di sistema integrabile consideriamo un insieme di oscillatori, la cui hamilto-niana in coordinate normali si scrive H = 1
2
∑
i(p2i +ω2
i q2i ), ed in coordinate azione angolo,
vedi (17.7.7), diventaH = ω · (18.1.2)
Un altro sistema integrabile e costituito da un insieme di pendoli orizzontali, detti ancherotatori, ovvero di aste ruotanti attorno ad assi verticali, la cui hamiltoniana e
H =d
∑
i=1
2i2Ai
(18.1.3)
dove Ai sono i momenti di inerzia rispetto all’asse di rotazione. Le frequenze del motoωi = i/Ai sono proporzionali all’azione, che coincide con il momento della quantita dimoto. Gli oscillatori rappresentano un sistema isocrono, i rotatori un sistema anisocrono
perche le frequenze nel primo caso sono fisse, nel secondo dipendono dalle condizioni iniziali.Altri esempi di sistemi integrabili sono quelli per i quali la equazione di Hamilton-Jacobie separabile. Tra questi segnaliamo la particella in un campo centrale la cui hamiltoniana,come proveremo nel paragrafo (23.2), e dato da
H = −mα2
2
1
(1 + 2)2(18.1.4)
dove una azione e il momento della quantita di moto e l’altra e associata al moto radiale.
In un sistema di coordinate qualsiasi, nel quale l’equazione di Hamilton-Jacobi non sia se-parabile, un sistema risulta integrabile se possiede d integrali primi indipendenti i cui flussicommutano. Questa condizione, che verra analizzata nel prossimo paragrafo, richiede cheper un sistema a 2 gradi di liberta si trovi un secondo integrale primo oltre l’hamiltoniana.Un classico esempio e la seguente hamiltoniana di oscillatori con accoppiamento non lineare
H± =1
2(p2
x + p2y + x2 + y2) + x2y ± 1
3y3 (18.1.5)

c©88-08- 9820 18.2. Geometria dello spazio delle fasi 355
Si puo provare che H+ e integrabile perche esiste un integrale primo mentre H− nota comehamiltoniana di Henon-Heiles e non integrabile. Per ogni hamiltoniana integrabile H(q,p)si considera una trasformazione canonica
q = q(θ, ), p = p(θ, ) (18.1.6)
che la trasforma in H(). Le coordinate ed i momenti sono funzioni periodiche degli angolie possono essere sviluppate in serie di Fourier
q =∑
k
qk() eik·θ, p =∑
k
pk() eik·θ, (18.1.7)
La evoluzione temporale delle coordinate e dei momenti si ottiene sostituendo (18.1.1) in(18.1.6) oppure in (18.1.7) ed il moto vien detto quasi periodico. La condizione perche ilmoto risulti periodico con periodo T e che esista un vettore di interi n tale che ωT = 2πn
18.2. GEOMETRIA DELLO SPAZIO DELLE FASI
La geometria dei sistemi integrabili, che e semplice nelle coordinate in cui le simmetriesono esplicite, consente di coglierne gli aspetti intrinseci e di capire i cambiamenti cui ilsistema e soggetto in seguito ad una perturbazione
Sistemi unidimensionali
Ogni sistema ad un solo grado di liberta e integrabile. Se q e una coordinata cartesianalo spazio delle fasi e il piano e le orbite su cui il moto e periodico sono chiuse (librazione).Un tipico esempio e l’oscillatore anarmonico H = 1
2 (p2 + q2) + qm, vedi paragrafo 2.8. Seq e una coordinata angolare lo spazio delle fasi e il piano, che l’identificazione dei punti(q, p) e (q+2nπ, p) trasforma in un cilindro. Sul piano si hanno curve chiuse (librazione) ecurve periodiche (rotazione); sul cilindro diventano entrambe chiuse ma le prime possonoessere deformate fino a ridurle ad un punto le seconde no; un tipico esempio e il pendoloH = 1
2p2 − cos q, vedi paragrafo 2.8.
!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!
q
5555555555555555555555555555555555555555555555555555555555555555555555
q 0 2π
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
p
!!!!!!!!!!!!p
555555555555555555555555555555555555555555555555555555555555
Figura 18.2.1. Orbite nel piano delle fasi per l’oscillatore (lato sinistro) e il pendolo (lato destro) ed
area delimitata uguale a 2π .

356 18. Sistemi integrabili c©88-08- 9820
L’azione e (2π)−1 volte l’area delimitata da una curva chiusa o sottesa nell’intervallo [0, 2π]da una curva periodica nel piano di fase, vedi figura 18.2.1. In 5.B il toro T e stato definitocome il segmento [0, 2π] con gli estremi identificati o come la retta ove si identificano ipunti traslati di 2π n. Le funzioni definite sul toro sono le funzioni periodiche sulla rettareale.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
555555555555555555555555555555555555555555555555555555555555555555555555555555555
j
55555555555555555555555555555555555555555555555555555555555555555555555555555555
j
θ
Figura 18.2.2. Cilindro definito come T×R (lato sinistro) e come S×R (lato destro), con le corrispondenti
orbite; le aree sottese, in tratteggio, valgono 2π .
Cilindri. Definiamo il cilindro come il prodotto diretto del toro per la retta reale T × R.Alle coordinate angolo e azione (θ, ) sul piano di fase corrispondono le coordinate (θ′, )sul cilindro dove
θ′ = θmod2π, θ = θ′ + 2πn, (18.2.1)
Ogni singola orbita e rappresentata come un segmento orizzontale, la cui quota e . Ilcilindro, definito come prodotto diretto del cerchio per la retta S×R e una varieta immersain R
3, parametrizzata da
x = cos θ′, y = sin θ′, z = (18.2.2)
ed e topologicamente equivalente a T × R, vedi figura 18.2.2. La trasformazione
Q =√
2 cos θ′, P = −√
2 sin θ′ (18.2.3)
tra i punti di T × R+ e R2 e biunivoca e conserva le aree; le coordinate Q,P vengono
dette normali. Ad ogni traiettoria sul cilindro, vedi figura 18.2.2, corrisponde un cerchionel piano Q,P , vedi figura 18.2.3. L’hamiltoniana espressa in funzione delle coordinate
normali H = H(P 2+Q2
2 ) e invariante rispetto alle rotazioni nel piano.
I cilindri T×R+ e S×R+ sono in corrispondenza biunivoca tra loro e con il piano R2 delle
coordinate normali. Invece le traiettorie sul piano (θ, ), detto di ricoprimento, sono rettei cui punti in corrispondenza biunivoca con l’asse dei tempi.

c©88-08- 9820 18.2. Geometria dello spazio delle fasi 357
φ
2j
P
Q
Figura 18.2.3. Piano delle coordinate normali.
Sistemi multidimensionali
Un sistema integrabile a d > 1 gradi di liberta si presenta, nelle coordinate azione-angolo,come collezione di sistemi unidimensionali. Lo spazio delle fasi e il prodotto diretto deisingoli spazi; ogni orbita appartiene ad una varieta di dimensione d che e il prodottodiretto delle orbite dei sottosistemi unidimensionali. Le variabili angolo ed azione sono lecoordinate sui cilindri, lo spazio delle fasi e il prodotto diretto di d cilindri che equivale alprodotto diretto di uno spazio euclideo R
d per un toro Td di dimensioni d.
(T × R) × . . .× (T × R) = (T × . . .× T) × (R × . . .× R) = Td × R
d (18.2.4)
Il prodotto di d cilindri definiti da S × R e un toro omeomorfo a Td × R
d.
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
xx
o
o
x x
o
o
φ
φ2
1 o o
x
x
Figura 18.2.4. Diverse rappresentazioni del toro T2.
Tori. Abbiamo dato due definizioni di toro multidimensionale Td come prodotto diretto
di tori unidimensionali che equivale ad un ipercubo con le facce opposte identificate, op-pure come prodotto diretto di cerchi che e rappresentabile come varieta immersa in uno
358 18. Sistemi integrabili c©88-08- 9820
spazio di dimensione non inferiore a d+ 1. Queste due diverse realizzazioni del toro sonotopologicamente equivalenti ossia deformabili con continuita l’una nell’altra come risultaevidente nel caso d = 2 ove il passaggio dal quadrato coi lati identificati alla “ciambella” eillustrato dalla figura 18.2.4. In coordinate normali l’hamiltoniana di un sistema integra-
bile e H = H(P 2
1+Q2
1
2 , . . . ,P 2
d +Q2
d
2 ) e le traiettorie appartenegono ad un toro definito comeprodotto diretto di cerchi. Quindi lo spazio delle fasi coincide con quello definito dallecoordinate azione ed angolo a parte le due diverse realizzazioni del toro.
.
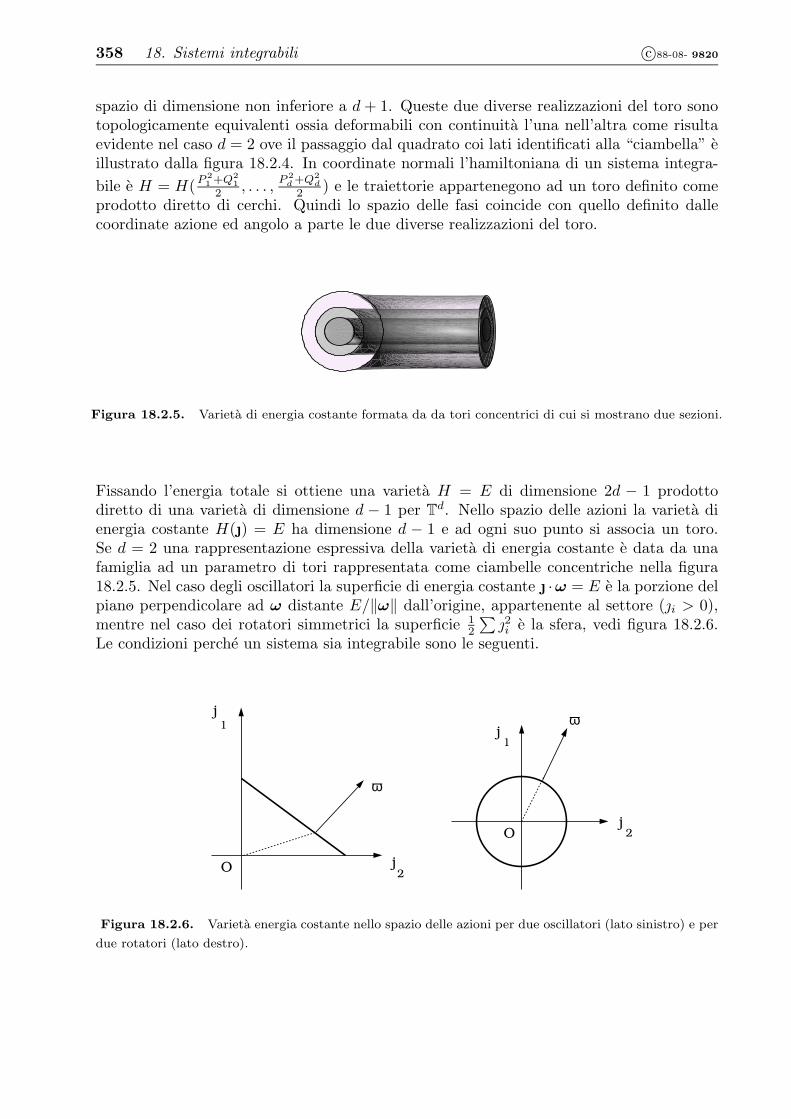
Figura 18.2.5. Varieta di energia costante formata da da tori concentrici di cui si mostrano due sezioni.
Fissando l’energia totale si ottiene una varieta H = E di dimensione 2d − 1 prodottodiretto di una varieta di dimensione d − 1 per T
d. Nello spazio delle azioni la varieta dienergia costante H() = E ha dimensione d − 1 e ad ogni suo punto si associa un toro.Se d = 2 una rappresentazione espressiva della varieta di energia costante e data da unafamiglia ad un parametro di tori rappresentata come ciambelle concentriche nella figura18.2.5. Nel caso degli oscillatori la superficie di energia costante ·ω = E e la porzione delpiano perpendicolare ad ω distante E/‖ω‖ dall’origine, appartenente al settore (i > 0),mentre nel caso dei rotatori simmetrici la superficie 1
2
∑
2i e la sfera, vedi figura 18.2.6.Le condizioni perche un sistema sia integrabile sono le seguenti.
O
j
j
1
2
j2O
ω
ωj1
Figura 18.2.6. Varieta energia costante nello spazio delle azioni per due oscillatori (lato sinistro) e per
due rotatori (lato destro).

c©88-08- 9820 18.3. Risonanze 359
Teorema di Arnold-Liouville. Se H1(q,p), . . . , Hd(q,p) sono d funzioni definite sullospazio delle fasi di un sistema con hamiltoniana H(q,p) = K(H1, . . . , Hd) tali che:
i) siano in involuzione tra loro: [Hi, Hk] = 0ii) grad Hi siano linearmente indipendentiiii) la varieta M di dimensione d definita da Hi(q,p) = Ei per i = 1, . . . , d sia compatta
e connessa
allora la varieta M e topologicamente un toro Td ed e invariante. Se si scelgono gli angoli
(θ1, . . . , θd) come coordinate sul toro, i momenti coniugati sono le variabili d’azione. Nellecoordinate q,p il moto e quasi periodico.
Questo teorema e evidente nel caso di hamiltoniane esplicitamente separabili (17.5.2) al-lorche Hi dipende solo dalle coordinate (qi, pi). Infatti gli Hi sono manifestamente ininvoluzione tra loro e con H poiche
[Hi, H] =∑
k,ℓ
∂Hi
∂xkJkℓ
∂H
∂xℓ=
∑
k,ℓ,m
∂Hi
∂xkJkℓ
∂Hm
∂xℓ
∂K
∂Hm=
∑
m
[Hi, Hm]∂K
∂Hm= 0 (18.2.5)
Un singolo integrale primo Hi(q,p) = Ei individua una varieta di dimensioni 2d − 1nello spazio fasi. Da ii) segue che la intersezione M delle varieta corrispondenti a tutti gliintegrali primi ha dimensione d. Le condizioni di involuzione i) e compattezza iii) implicanoche M sia un toro T
d. Nel caso separabile la condizione di compattezza e verificata se lecurve su ogni piano di fase sono chiuse. L’hamiltoniana H puo coincidere con uno degliintegrali primi H1 = H come accade nel caso del campo centrale e del giroscopio. Gliangoli e le energie non sono coordinate canoniche mentre lo sono gli angoli e le azionidefinite come integrali sui cicli base della forma differenziale p · dq. La dimostrazioneche la varieta compatta di dimensione d e un toro segue da considerazioni topologiche:infatti se indichiamo con Φi = J gradHi i campi vettoriali associati a Hi che generano icorrispondenti flussi hamiltoniani la condizione di involuzione si legge come ortogonalita traΦi e gradHi. Poiche gradHi sono linearmente indipendenti, i campi Φi che appartengono aTM sono linearmente indipendenti e generano d famiglie di traiettorie (cicli base), che nonhanno punti singolari. Cio e possibile solo sul toro come si verifica per d = 2 confrontandole famiglie di curve ortogonali tracciate sul toro e sulla sfera (i punti singolari sono ai poli).
18.3. RISONANZE
L’evoluzione di un sistema integrabile e una traslazione sul toro Td. Nello spazio di rico-
primento Rd la traiettoria e una retta di equazione θ(t) = θ(0)+ωt. La traiettoria sul toro
θ′(t) = θ′(0)+ωt mod 2π appare come una successione di segmenti, i cui estremi successiviappartengono alle facce dell’ipercubo, come mostra la figura 18.3.1. nel caso d = 2. Lanatura della traiettoria dipende dalle proprieta aritmetiche delle frequenze. I casi estremisi hanno con frequenze razionalmente indipendenti e con frequenze proporzionali ad interi.Nel primo l’orbita e densa sul toro, nel secondo l’orbita e chiusa ed il moto e periodico.

360 18. Sistemi integrabili c©88-08- 9820
12π 4π
2π
4π
2θ
θ
Figura 18.3.1. Costruzione di una orbita sul toro T2.
Per un sistema a due gradi di liberta questi sono gli unici due casi possibili. La condizioneperche l’orbita sia chiusa sul toro e quindi periodica e che esista un T tale che θ′(t+ T ) =θ′(t); il minimo tra i numeri reali che verificano la condizione e il periodo del moto. Sullospazio di ricoprimento tale condizione si scrive
θ(t+ T ) = θ(t) + 2π n (18.3.1)
dove n e un vettore a componenti intere. Questo implica che
ω =2π
Tn (18.3.2)
e come conseguenza i rapporti tra tutte le componenti di ω sono razionali. Consideriamoun sistema a due gradi di liberta tale che n = (m,n) con m,n interi primi tra loro e
ω1 =2π
Tm, ω2 =
2π
Tn,
ω1
ω2=m
n(18.3.3)
Gli interi m,n rappresentano il numero di cicli, ossia di escursioni di 2π lungo i due assi,che vengono descritti per chiudere l’orbita. Sul toro come varieta in R
3 l’orbita e un’elicachiusa la cui parametrizzazione e data da (5.B.10). Nella figura 18.3.2 si mostrano esempidi orbite chiuse con m/n = 0/1, 1/1, 2/3
Se il rapporto e irrazionale l’orbita e densa sul toro e la sua chiusura coincide con il toro.Questo caso si ottiene come limite di una successione di frequenze ωj = ω2(mj/nj , 1) il cuirapporto razionale mj/nj converge a ω1/ω2. Siccome mj e nj divergono per → ∞, ancheil corrispondente periodo Tj = nj2π/ω2 diverge. Consideriamo come esempio il caso in cui
c©88-08- 9820 18.3. Risonanze 361
0/1 1/1 2/3θ 1
θ 2
θ 1θ 1
θ 2θ 2
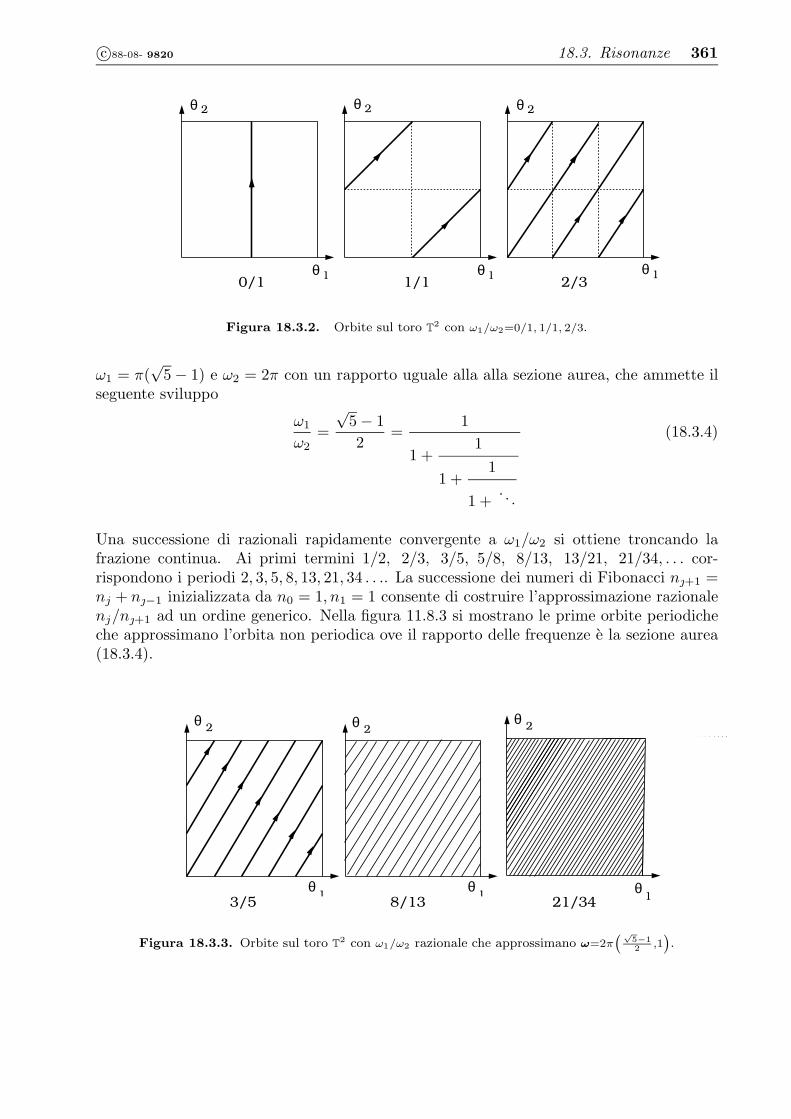
Figura 18.3.2. Orbite sul toro T2 con ω1/ω2=0/1, 1/1, 2/3.
ω1 = π(√
5 − 1) e ω2 = 2π con un rapporto uguale alla alla sezione aurea, che ammette ilseguente sviluppo
ω1
ω2=
√5 − 1
2=
1
1 +1
1 +1
1 +.. .
(18.3.4)
Una successione di razionali rapidamente convergente a ω1/ω2 si ottiene troncando lafrazione continua. Ai primi termini 1/2, 2/3, 3/5, 5/8, 8/13, 13/21, 21/34, . . . cor-rispondono i periodi 2, 3, 5, 8, 13, 21, 34 . . .. La successione dei numeri di Fibonacci n+1 =nj + n−1 inizializzata da n0 = 1, n1 = 1 consente di costruire l’approssimazione razionalenj/n+1 ad un ordine generico. Nella figura 11.8.3 si mostrano le prime orbite periodicheche approssimano l’orbita non periodica ove il rapporto delle frequenze e la sezione aurea(18.3.4).
!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
θ2θ
2θ
2
θ1
θ1
θ1
3/5 8/13 21/34
Figura 18.3.3. Orbite sul toro T2 con ω1/ω2 razionale che approssimano ω=2π
(√5−1
2,1)
.

362 18. Sistemi integrabili c©88-08- 9820
Per sistemi di dimensione d si distinguono d casi facendo corrispondere ad ogni vettore difrequenze ω un intero r compreso tra 0 e d− 1, detto ordine di risonanza.
Definizione. Il vettore delle frequenze si dice non risonante se
ω · k = 0, k ∈ Zd =⇒ k = 0 (18.3.5)
cioe non esiste alcun vettore a componenti intere k ∈ Zd ortogonale a ω. Al crescere di
|k| = |k1|+ . . .+ |kd| il prodotto scalare puo diventare arbitrariamente piccolo. Se decrescecon legge di potenza
|ω · k|−1 ≤ γ|k|η, (18.3.6)
dove γ, η sono due costanti positive, si dice che ω soddisfa una condizione diofantina
Definizione. Se ω e ortogonale a tutti i vettori k appartenenti ad un sottospazio Zr ⊂ Zd
di dimensione r, si dice che ω soddisfa un condizione di risonanza di ordine r.
ω · k = 0, k ∈ Zr, dim Zr = r (18.3.7)
Se d = 3 la condizione di non risonanza si verifica se tutti i rapporti tra le frequenzesono irrazionali, la condizione di risonanza singola r = 1 si verifica se il rapporto tra duefrequenze e razionale, la condizione di risonanza doppia r = 2 se tutti i rapporti tra lefrequenze sono razionali. E sempre possibile fare un cambiamento di coordinate da θ, a ψ, I in modo che il nuovo vettore delle frequenze Ω abbia r componenti nulle, una perciascuna condizione di risonanza. mentre le d−r componenti non nulle siano non risonanti,cioe abbiano rapporti irrazionali.
Proposizione. Se le frequenze sono non risonanti l’orbita e densa sul toro Td ed il moto
e quasi periodico. Se sono risonanti e r e l’ordine di risonanza l’orbita e densa sul toroT
d−r. Se r = d− 1 l’orbita e chiusa ed il moto e periodico.
Per provare quanto enunciato scegliamo in Zr una base e1, . . . , er e altri d − r vettorier+1, . . . , ed linearmente indipendenti che insieme ai primi r formino una base in Z
d. Lamatrice E = (e1, . . . , ed) deve avere determinante 1 affinche la trasformazione sia invertibilein Z
d. Infatti un vettore k ha nella nuova base componenti κi intere se e solo se det E=1.
k =
d∑
i=1
eiκi, (18.3.8)
Detto κ il vettore di componenti κ1, . . . , κd, tenendo conto che (ei)j = Ei riscriviamo(18.3.5) in forma matriciale
k = Eκ, κ = E−1k (18.3.9)
Gli elementi della matrice inversa E−1 sono interi e quindi κ ∈ Z
d.
Le componenti covarianti del vettore ω sulla nuova base e1, . . . , ed sono
Ωi = ω · ei =d
∑
=1
Ekiωk (18.3.10)

c©88-08- 9820 18.3. Risonanze 363
ed indichiamo con Ω il vettore di componenti Ωi. che nella notazione matriciale si scrive
Ω = Eω, (18.3.11)
Le prime r componenti di Ω sono nulle Ω1 = . . . = Ωr = 0 e quindi si ha
ω · k = ω · Eκ = Ω · κ = κr+1Ωr+1 + . . .+ κdΩd (18.3.12)
La trasformazione canonica lineare che definisce i nuovi angoli ψ e le nuove azioni I e
ψ = Eθ, I = E−1 (18.3.13)
La trasformazione (18.3.13) si scrive anche nella forma
ψk = ek · θ, =
d∑
i=1
eiIi (18.3.14)
si puo notare che le nuove azioni ed i primi r angoli sono costanti poiche sono nulle lecorrispondenti frequenze
ψk(t) =
ψk(0) k = 1, . . . r
ψk(0) + tΩk k = r + 1, . . . , d(18.3.15)
L’hamiltoniana di un sistema isocrono non dipende piu dalle prime r azioni
H = ω · = Ω · I = Ωr+1 Ir+1 + . . .+ Ωd Id (18.3.16)
Se il sistema e anisocrono la condizione di risonanza dipende dalle condizioni iniziali.Fissata una azione ∗ cui corrisponde una frequenza ω risonante e detto I = E
−1( − ∗)l’hamiltoniana diventa H = Ω · I + 1
2I · AI + . . . dove A e una matrice simmetrica. Nelpunto I = 0 l’evoluzione degli angoli e dettata da (18.3.15).
Il cambiamento tra gli angoli e una trasformazione del toro in se (automorfismo) solo se det E=1. Dette
ψ′=ψmod 2π e θ′=θmod 2π le coordinate sul toro alla trasformazione diretta Ψ=Eθ sul ricoprimento
corrisponde la trasformazione sul toro
ψ′=Eθmod 2π=E(θ′+2πk) mod 2π=Eθ′
qualunque sia la matrice intera E. Ma la trasformazione inversa
θ′=θmod 2π=E−1ψmod 2π=E
−1(ψ′+2πk) mod 2π=E−1ψ′
e ancora definita sul toro solo se E−1
k e un vettore intero per qualsiasi k.

364 18. Sistemi integrabili c©88-08- 9820
18.4. ERGODICITA
Si consideri uno spazio delle fasi E ed un flusso St; se su E e definita una misura µ invarianterispetto al flusso, tale cioe che
µ(A) = µ(
St(A))
(18.4.1)
per ogni insieme A misurabile ed ogni t reale, allora si dice che (E , St, µ) costituiscono unsistema dinamico. La misura µ va interpretata come misura di probabilita e pertanto deveessere positiva e normalizzata µ(E) = 1, vedi anche paragrafo 24.A. Se E e una varietacompatta e St preserva i volumi, la misura di probabilita e
µ(A) =Vol (A)
Vol (E)(18.4.2)
I sistemi hamiltoniani con spazio delle fasi compatto sono esempi di sistemi dinamici percheil teorema di Liouville assicura che il flusso preserva i volumi.
Medie spaziali e temporali. La media spaziale di una variabile dinamica f(x) e definita da
〈f〉S
=
∫
Ef(x)µ(dx) (18.4.3)
dove con µ(dx) indichiamo la misura di un parallelepipedo infinitesimo con vertice in x elati definiti dalle componenti del vettore dx. La media temporale e data da
〈f〉T(x) = lim
t→∞1
t
∫ t
0
f(Sτ (x))dτ (18.4.4)
Notiamo che la media temporale dipende in generale dal punto iniziale della traiettoria.
Definizione. Se la media temporale di una qualsiasi variabile dinamica non dipende dax, tranne al piu un insieme di misura nulla, il sistema si dice ergodico.
Si possono dare altre definizioni equivalenti di sistema ergodico, poiche valgono le seguentiproprieta.
Proprieta A. Un sistema e ergodico se e solo se le media temporale di una qualsiasivariabile dinamica e uguale alla media spaziale, tranne al piu un insieme di punti conmisura nulla.
La condizione sufficiente e ovvia. La condizione necessaria segue dal teorema di Birkhoff
〈f〉S
=
∫
E〈f〉
T(x)µ(dx) (18.4.5)
Se quindi 〈f〉T(x) e costante quasi ovunque da (18.4.5) segue che 〈f〉
T(x) = 〈f〉
S.

c©88-08- 9820 18.4. Ergodicita 365
Un sistema ergodico e dunque un sistema la cui orbita esplora tutto lo spazio delle fasi pert→ ∞ tranne insiemi di misura nulla. Questa proprieta fa sı che la media temporale possaessere sostituita con la media spaziale. Per sistemi dinamici piu complessi delle traslazionisul toro, la media temporale e spesso non calcolabile mentre lo e la media spaziale. Lacondizione di ergodicita non e compatibile con la esistenza di integrali primi che dannouna foliazione dello spazio delle fasi in sottospazi invarianti ed in generale con l’esistenza disottospazi invarianti che non siano insiemi di misura 1 o 0. Un sistema i cui soli sottospaziinvarianti abbiano misura 0 oppure 1 si dice metricamente indecomponibile. Se l’orbita diun sistema ergodico esplora tutto lo spazio delle fasi risulta densa su E .
Proprieta B. Condizione necessaria e sufficiente perche un sistema sia ergodico e che nonabbia integrali primi non banali (che non siano funzioni costanti ovunque tranne su insiemidi misura nulla).
Proprieta C. Condizione necessaria e sufficiente perche un sistema sia ergodico e che siametricamente indecomponibile.
La condizione necessaria e evidente sia per B sia per C. Infatti se f(x) e un integraleprimo allora 〈f〉
T(x) = f(x) e l‘ergodicita implica f(x) = 〈f〉
S, cioe che f sia una funzione
banale in quanto costante. Nel secondo caso la variabile dinamica f(x) = χA(x) data dallafunzione caratteristica dell’insieme A
χA(x) =
1 se x ∈ A
0 se x 6∈ A(18.4.6)
ha come media spaziale la misura di A. L’invarianza St(A) = A implica che χA(x) siaintegrale primo e l’ergodicita impone che sia zero o 1 su E tranne insiemi di misura nullae quindi µ(A) vale 0 od 1.
Proprieta D. Se un sistema e ergodico le orbite St(x) per tutti gli x di E , tranne uninsieme di misura nulla, sono dense e la loro chiusura coincide con E .
Supponiamo per assurdo che esista un insieme E∗ di punti di misura non nulla tali cheogni orbita St(x) con x ∈ E∗ abbia intersezione nulla con un insieme A di misura positiva.Allora la media temporale di χA(x) e nulla poiche χA(St(x)) = 0 per ogni t. La mediaspaziale e invece
〈χA〉S=
∫
EχA(x)µ(dx) = µ(A) > 0 (18.4.7)
Quindi media spaziale e temporale differiscono per tutti i punti iniziali in E∗ e cio con-traddice l’ipotesi di ergodicita. Quindi µ(E∗) = 0, puo cioe esistere al piu un insieme dimisura nulla di punti iniziali la cui orbita non risulta densa. I sistemi integrabili sono perogni fissato valore delle azioni sistemi dinamici sul toro T
d e sono ergodici soltanto se lefrequenze risultano non risonanti.

366 18. Sistemi integrabili c©88-08- 9820
Traslazioni sul toro
Le traslazioni sul toro Td
St(θ) = θ + ω t mod2π (18.4.8)
con misura invariante definita da (18.4.2) costituiscono un sistema dinamico. Se f(θ)e una variabile dinamica sul toro la corrispondente variabile dinamica definita sul suoricoprimento R
d e la funzione periodica di periodo 2π uguale a f(θ) per 0 ≤ θi ≤ 2π.La media spaziale della variabile dinamica e definita da
〈f〉S
=
∫
Td
f(θ)µ(dθ) = (2π)−d
∫ 2π
0
dθ1 . . .
∫ 2π
0
dθdf(θ1, . . . , θd) (18.4.9)
e la media temporale da
〈f〉T(θ) = lim
t→∞1
t
∫ t
0
f(ωτ + θ)dτ (18.4.10)
Se le frequenze sono non risonanti e f(θ) e un polinomio trigonometrico di grado K
f(θ) =∑
|k|≤K
fkeik·θ, |k| = |k1| + . . .+ |kd| (18.4.11)
la media spaziale e temporale coincidono. Infatti la media spaziale e
〈f〉S
= f0 (18.4.12)
poiche la media spaziale di eik·θ e nulla per k 6= 0
〈eik·θ〉S
= (2π)−d
∫ 2π
0
eik1θ1dθ1 . . .
∫ 2π
0
eikdθddθd = 0 se k 6= 0 (18.4.13)
La media temporale vale
〈f〉T(θ) = lim
t→∞1
t
∫ t
0
f(ωt′ + θ)dt′ = f0 + limt→∞
1
t
∑
0<|k|≤K
fkeik·θ e
ik·ω t − 1
ik · ω (18.4.14)
Poiche i denominatori sono diversi da 0 per l’ipotesi di non risonanza, il limite per t→ ∞e uguale a f0. quindi uguale alla media spaziale, per tutte le condizioni iniziali θ. Se lefrequenze soddisfano una condizione di risonanza di ordine r il cambiamento di coordinate(18.3.15) permette di definire un nuovo sistema dinamico costituito dalle traslazioni sultoro T d−r con frequenze non risonanti; questo sistema e dunque ergodico e l’orbita e densasu T
d−r. Questo dimostra la proposizione enunciata alla fine del precedente paragrafo.

c©88-08- 9820 18.5. Mappa di Poincare 367
18.5. GEOMETRIA DELLA MAPPA DI POINCARE
Lo studio della dinamica di sistemi con d ≥ 2 gradi di liberta si confronta con la difficoltadi analizzare strutture geometriche in spazi a 2d dimensioni. Un metodo che consente diabbassare la dimensionalita e la sezione di Poincare. Si considera la sezione geometricadell’orbita con l’iperpiano qd = 0 con un preciso orientamento pd > 0 e la si proiettasull’iperpiano qd = pd = 0. La corrispondenza tra punti successivi dell’orbita nell’iperpianoqd = pd = 0 definisce la mappa di Poincare.La sezione e successiva proiezione di una superficie di energia costante definisce un dominiodi R
2(d−1), compatto se tale e H(q,p) = E, cui appartengono le orbite di energia E. Lasezione con una superficie f(q,p) = 0 si riconduce alla sezione con un iperpiano scegliendoun nuovo sistema di coordinate canoniche ove Qd = f(q,p).
Mappa stroboscopica Per un’hamiltoniana con d − 1 gradi di liberta e con dipendenzaperiodica dal tempo H(q,p, t) si costruisce la mappa stroboscopica, che trasforma unpunto dell’orbita all’istante t = t0 + nT nel punto all’istante t = t0 + (n + 1)T . Questamappa, come per le equazioni lineari (vedi paragrafi 10.4 e 10.6) dipende da t0, non da n.
Mappe di oscillatori
Per l’oscillatore forzato, la cui hamiltoniana e H = ω(p2 + q2)/2 + λq cos(Ωt), la mappastroboscopica e una rotazione R(ωT ), vedi paragrafo 10.4. Per un sistema di due oscillatoriarmonici disaccoppiati la mappa di Poincare e ancora una rotazione. Se l’hamiltoniana eH = 1
2 (p2x + ω2
xx2) + 1
2 (p2y + ω2
yy2) scelto l’istante iniziale in modo che si abbia y(0) = 0,
la sezione con l’iperpiano y = 0 tale che py > 0 avviene agli istanti tn = 2πnω−1y poiche
y(t) = py(0)ω−1x sin(ωyt).
p
ω
y xp
ω
ωy ωx
y
y
x
x
Figura 18.5.1. Mappa di Poincare per oscillatori con sezione y=0, py>0.
I punti dell’orbita nello spazio di sezione x, px, py, appartengono ad una ellisse che giacenel piano py = py(0). La successiva proiezione x(tn), px(tn) sul piano x, px e ancora ad

368 18. Sistemi integrabili c©88-08- 9820
una ellisse. Se scaliamo le coordinate in modo che l’ellisse diventi un cerchio ponendo
x′n = ω1/2x x(tn), p′n = ω
−1/2x px(tn) la mappa di Poincare e la rotazione di un angolo
ωx(tn − tn−1) ossia
x′n+1
p′n+1
= R
(
2πωx
ωy
)
x′n
p′n
(18.5.1)
Poiche i moti sui due piani di fase sono disaccoppiati l’orbita della mappa e formatadai punti dell’orbita di H sul piano x, px presi agli istanti in cui l’orbita sul piano y, py
attraversa l’asse py positivo, vedi figura 18.5.1. L’orbita della mappa e discreta o densasull’ellisse se il rapporto tra le frequenze e razionale oppure irrazionale. La superficie dienergia costante e un elissoide in R
4, la sua intersezione con l’iperpiano di sezione y = 0con il vincolo py > 0, e un semielissoide ΣE ∈ R
3, vedi figura 18.5.2.
ΣE
:p2
x
2+ ω2
x
x2
2+p2
y
2= E, py > 0 (18.5.2)
La proiezione di ΣE
sul piano x, px e il dominio
p2x
2+ ω2
x
x2
2≤ E (18.5.3)
il cui bordo e una ellisse. La corrispondenza tra i punti dell’orbita e la sua proiezione sulpiano x, px e biunivoca; per tale ragione e d’uso riferire la mappa di Poincare e l’orbitacorrispondente al piano xy.
ΣE
x
py
px
Figura 18.5.2. Sezione ΣE
di una superficie di energia costante con l’iperpiano y=0 e proiezione delle
orbite sul piano xpx per due oscillatori disaccoppiati.

c©88-08- 9820 18.5. Mappa di Poincare 369
Superfici invarianti e integrali primi
La geometria delle orbite sulla sezione di Poincare si ottiene esaminando gli integrali primidel moto, dati dalle due azioni invarianti che coincidono con le energie degli oscillatori
Jx =p2
x + ω2xx
2
2ωx, Jy =
p2y + ω2
yy2
2ωy, H = ωxJx + ωyJy (18.5.4)
Le superfici Jx = cx, Jy = cy sono cilindri la cui intersezione e il toro T2. La superficie di
energia costante H = E e foliata da una famiglia ad un parametro di tori e la sua proiezionesu Σ
Ee un semielissoide foliato in ellissi, ottenute come intersezione con le superfici Σx
oppure Σy definite dai dai due invarianti
ΣE
:p2
y
2+p2
x + ω2x
2= E, Σx :
p2x + ω2
xx2
2ωx= cx Σy : py = (2cy)1/2 (18.5.5)
L’elissoide ΣE
i cilindri Σx ed i piani Σy sono mostrati nella figura 18.5.3. 18-5-3.
p px x
py
py
x x
Figura 18.5.3. Superfici nello spazio di sezione: ΣE ,Σy (lato sinistro), ΣE ,Σx (lato destro).
Mappe di oscillatori accoppiati
Se gli oscillatori sono accoppiati quadraticamente, si disaccoppiano passando a coordinatenormali X,Px, Y, Py e la sezione di Poincare Y = 0, Py > 0 e quella analizzata sopra. Lasezione con l’iperpiano y = 0, py > 0 e diversa e le orbite proiettate sul piano x, px hannouna struttura piu complessa rispetto alle precedenti. Consideriamo l’hamiltoniana (13.4.1)che riscriviamo
H =p2
x + x2
2+p2
y + y2
2+xy
2(18.5.6)

370 18. Sistemi integrabili c©88-08- 9820
Le frequenze sono ωx = 1/√
2, ωy =√
2/√
3 e gli invarianti che in coordinate normali sonoJx = (P 2
x +X2)/2 e Jy = (P 2y + Y 2)/2 nelle coordinate iniziali diventano
ωxJx =1
4
[
(px − py)2 +1
2(x− y)2
]
, ωyJy =1
4
[
(px + py)2 +3
2(x2 + y2)
]
(18.5.7)
Nell’iperpiano di sezione y = 0, py > 0 le superfici definite dagli invarianti 4ωxJx =cx, 4ωyJy = cy sono cilindri obliqui
4ωxJx =x2
2+ (px − py)2 = cx, 4ωyJy =
3x2
2+ (px + py)2 = cy (18.5.8)
mentre la superficie di energia costante e la semisfera x2 + p2x + p2
y = 2E, py > 0. Il puntofisso non e piu nell’origine e la proiezione di ΣE ∩ Σx sul piano x, px e formata da duecurve disgiunte come mostra la figura 18.5.4. Questa differenza non sorprende se si notache mentre Y (t) e periodica y(t) e quasiperiodica.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
py
px
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCx
x
px
Figura 18.5.4. Superfici ΣE , Σx nello spazio di sezione per oscillatori accoppiati e proiezione sul piano x,px.
Mappe sul toro
Per un sistema integrabile l’intersezione dell’orbita con il toro Td−1 specificato da φ′d = 0
avviene agli istanti tn = tn−1+ 2πω−1d e definisce la mappa di Poincare φ′i(tn+1) = φ′(tn)+
2πωk/ωdmod 2π, la cui orbita e densa se ω e non risonante.

c©88-08- 9820 18.6. Analisi delle frequenze 371
18.6. ANALISI DELLE FREQUENZE
Se un sistema non si presenta in forma esplicitamente integrabile o tale che la equazionedi Hamilton-Jacobi risulti separabile, non si riescono a valutare analiticamente le azioni egli angoli. E tuttavia possibile una strategia numerica, nota come analisi in frequenza, checonsiste nel determinare le frequenze del moto per ogni data condizione iniziale q(0),p(0)e quindi i coefficienti dello sviluppo di Fourier di ogni coordinata e di ogni momento. Datoun sistema hamiltoniano H ogni orbita quasi periodica e rappresentabile come sviluppo diFourier nella forma
q(t) =∑
k
akeik·ωt, p(t) =
∑
k
bkeik·ωt (18.6.1)
dove le frequenze ω ed i coefficienti ak,bk dipendono dalle condizioni iniziali. Nel casoin cui il sistema sia integrabile tutte le orbite, tranne le separatrici, sono quasi periodichee rappresentabili nella forma (18.1.7) dove gli angoli θ sono le coordinate sul toro T
d.Confrontando (18.1.7) e (18.1.1) con la (18.6.1) si vede che i coefficienti dello sviluppo diFourier sono, a meno di un fattore di fase, i coefficienti dello sviluppo che rappresenta iltoro nelle coordinate q,p cioe ak = qk()eik·θ(0)) e bk = pk()eik·θ(0)).Attraverso l’analisi di Fourier di una coordinata o momento qualsiasi e possibile deter-minare le frequenze. L’algoritmo, che e stato brevemente descritto nella appendice 10.B,consiste nel costruire un trasformata di Fourier discreta F (ω) di un segnale F (t) noto agliistanti tn = n∆t con 0 ≤ n ≤ N − 1 e nel determinare le frequenze attraverso la ricercadei massimi di |F (ω)|. Se le frequenze sono ben separate si puo raggiungere un precisioneN−4 sul calcolo delle frequenze usando un filtro di Henning. Note le frequenze ω, il calcolodei coefficienti ak, bk e un problema lineare.Se le frequenze ω sono non risonanti (18.6.1) fornisce una parametrizzazione del toro,poiche l’orbita e densa sul toro T
d e ivi le medie spaziali e temporali coincidono. Percalcolare l’azione partiamo dalla parametrizzazione del toro q(θ), p(θ) data da (18.6.1)dove ωt e sostituito da θ. Da (17.7.11) si ha
m =1
2π
∮
Γm
p · dq =1
2π
∫ 2π
0
d∑
ℓ=1
pℓ∂qℓ∂θm
dθm (18.6.2)
Poiche il risultato deve essere indipendente dal valore degli altri angoli θn con n 6= m, peril teorema di Poincare-Cartan, possiamo mediare su di essi e scrivere
m =1
2π
∫ 2π
0
∑
ℓ=1
dpℓ∂qℓ∂θm
dθ1 · · · dθd =∑
ℓ
∑
k, k′
(ak)ℓ (bk′)ℓikm
2π
∫ 2π
0
ei(k+k′)·θdθ1 · · · dθd =
d∑
ℓ=1
∑
k
ikm(ak)ℓ (bk′)ℓ δk+k′ =∑
k
ikm ak · b−k
(18.6.3)

372 18. Sistemi integrabili c©88-08- 9820
Poiche la somma su ciascun ki e tra −∞ e +∞ possiamo cambiare k in −k senza alterareil risultato. Per la stessa ragione la somma di km ak · a−k e nulla. Tenendo conto chea−k = a∗
kpoiche sia le coordinate sia i momenti sono funzioni reali, il risultato si scrive
m =1
2
∑
km(iak ·b−k− ia−k ·bk +ak ·a−k +bk ·b−k) =1
2
∑
k
km |ak− ibk|2 (18.6.4)
oppure in forma compatta definendo ck = ak − ibk i coefficienti dello sviluppo di Fourierdi q − ip.
q(t) − ip(t) =∑
k
ckeik·ωt =
1
2
∑
k
k |ck|2 (18.6.5)
Per i sistemi integrabili l’insieme delle condizioni iniziali sulla superficie di energia costante,cui corrispondono frequenze risonanti, ha misura nulla. Infatti se H ha un hessiano nonnullo esiste una biezione tra azioni e frequenze e la misura delle frequenze risonanti e nulla.Per i sistemi quasi integrabili il complementare dei tori non risonanti, costituito dalle orbiterisonanti o caotiche, ha misura finita. Una efficace rappresentazione dei tori non risonantisi ottiene nello spazio delle azioni J. Le orbite risonanti vi appaiono come canali vuoti,quelle caotiche come insiemi vuoti di natura irregolare, vedi figura 18.6.1.
0.55 0.80.15
0.4
0 0.05
0
0.05
0 0.050
0.05
J1
J2
Figura 18.6.1. Linee di risonanza nel piano delle frequenze ν1=ωx/ωz , ν2=ωy/ωz date da ν1k1+ν2k2+k3=0
con ki interi e con |k1|+|k2|≤6 (lato sinistro). I tre cerchietti a partire dall’alto corrispondono a frequenze
non risonanti, in risonanza doppia, in risonanza semplice rispettivamente. Tori non risonanti (lato destro)
nel piano delle azioni J1,J2 per la mappa di Poincare di di oscillatori anarmonici con dipendenza dal tempo
impulsiva H= 1
2ωx(x2+p2
x)+ 1
2ωy(y2+p2
y)+(xy2− 1
3x3)
∑
nδ(t−n) (vedi mappa di Henon paragrafo 21.2). I
rapporti tra frequenze lineari ωx, ωy e la frequenza ωz=2π della forza impulsiva sono ν1=0.205, ν2=1
2(√
5−1).
I canali corrispondono alle risonanze non lineari. Per il canale maggiore della risonanza (5,0,1) si mostra
il risultato teoria perturbativa risonante all’ordine 6 (linea tratteggiata) e all’ordine 8 (linea continua).