calculo - volume 2 - mauricio vilches
TRANSCRIPT

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 1/407
CÁLCULO: VOLUME II
MAURICIO A. VILCHES - MARIA LUIZA CORRÊA
Departamento de Análise - IMEUERJ

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 2/407
2
Copyright by Mauricio A. VilchesTodos os direitos reservados
Proibida a reprodução parcial ou total

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 3/407
3
PREFÁCIO
"Por favor, poderia me dizer que caminho devo seguir agora?Isso depende bastante de até onde você quer chegar."Lewis Carrol - Alice no País das Maravilhas
Esta notas são a continuação natural do livro CÁLCULO: VOLUME I, queé pré-requisito para este livro. Da mesma forma que o Cálculo Diferenciale Integral de uma variável, os conceitos centrais do Cálculo Diferencial eIntegral de várias variáveis são relativamente profundos e não se espera
que possam ser assimilados de uma só vez. Neste nível, o importante éque o leitor desenvolva a habilidade de calcular e adquira a compreensãogeométrica dos problemas. Esperamos que o livro permita ao leitor umacesso rápido e agradável ao Cálculo Diferencial e Integral de uma variável.Não podemos deixar de recomendar aos alunos a utilização, criteriosa, dossoftwares de Cálculo existente no mercado, pois eles são um complementoútil ao aprendizado da disciplina. IntroduDesejamos agradecer aos nossos colegas do Departamento de Análise e doIME-UERJ que, de algum modo, nos motivaram e deram condições paraescrever estas notas e à Sra. Sonia Maria Alves pela digitação. Certamente,todos os erros são exclusivamente de responsabilidade dos autores. central
Mauricio A. Vilches - Maria Luiza CorrêaRio de Janeiro

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 4/407
4

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 5/407
Conteúdo
1 GEOMETRIA ANALÍTICA 111.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Espaços Euclidianos . . . . . . . . . . . . . . . . . . . . . . . . 111.3 O Espaço Euclidiano Tridimensional . . . . . . . . . . . . . . . 111.4 Sistema de Coordenadas Ortogonais no Espaço . . . . . . . . 131.5 Produto Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.6 Norma Euclidiana de um Vetor . . . . . . . . . . . . . . . . . . 15
1.7 Ângulos Diretores e Co-senos Diretores . . . . . . . . . . . . . 171.7.1 Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.8 Produto Vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . 191.8.1 Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.9 Distância em R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.10 Retas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.10.1 Paralelismo e Perpendicularismo . . . . . . . . . . . . . 251.10.2 Forma Simétrica da Equação da Reta . . . . . . . . . . . 261.10.3 Distância de um Ponto a uma Reta . . . . . . . . . . . 27
1.11 Planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.11.1 Ângulo entre Planos . . . . . . . . . . . . . . . . . . . . 291.11.2 Paralelismo e Perpendicularismo entre Planos . . . . . 301.11.3 Distância de um Ponto a um Plano . . . . . . . . . . . 32
1.12 Generalizações . . . . . . . . . . . . . . . . . . . . . . . . . . . 331.12.1 Produto Escalar . . . . . . . . . . . . . . . . . . . . . . . 34
1.13 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2 SUPERFÍCIES QUÁDRICAS 412.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.2 Superfícies Quádricas . . . . . . . . . . . . . . . . . . . . . . . . 422.3 Elipsóide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.1 Esferas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.4 Hiperbolóide de uma folha . . . . . . . . . . . . . . . . . . . . 462.5 Hiperbolóide de duas folhas . . . . . . . . . . . . . . . . . . . . 48
5

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 6/407
6 CONTEÚDO
2.6 Parabolóide Elítico . . . . . . . . . . . . . . . . . . . . . . . . . 502.7 Parabolóide Hiperbólico . . . . . . . . . . . . . . . . . . . . . . 522.8 Cone Elítico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.9 Cilindros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.10 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3 FUNÇÕES DE VÁRIAS VARIÁVEIS 653.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.2 Domínio e Imagem . . . . . . . . . . . . . . . . . . . . . . . . . 713.3 Gráfico de Funções de Várias Variáveis . . . . . . . . . . . . . 753.4 Conjuntos de nível . . . . . . . . . . . . . . . . . . . . . . . . . 763.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4 CONJUNTOS ABERTOS, FECHADOS E FRONTEIRA 954.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 954.2 Bolas Abertas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 954.3 Conjuntos Abertos . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.4 Conjunto Fronteira . . . . . . . . . . . . . . . . . . . . . . . . . 984.5 Conjuntos Fechados . . . . . . . . . . . . . . . . . . . . . . . . . 100
5 LIMITES E CONTINUIDADE 1015.1 Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.2 A não existência de um limite . . . . . . . . . . . . . . . . . . . 1065.3 Continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6 DERIVADAS PARCIAIS 1176.1 Definições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1176.2 Generalizações . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236.3 Interpretação Geométrica das Derivadas Parciais . . . . . . . . 1236.4 Derivadas Parciais como Taxa de Variação . . . . . . . . . . . 1266.5 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . 1306.6 Aproximação Linear . . . . . . . . . . . . . . . . . . . . . . . . 1376.7 Derivadas Parciais de Ordem Superior . . . . . . . . . . . . . . 1436.8 Regra da Cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . 1526.9 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
7 DERIVADA DIRECIONAL 165
7.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1657.2 Derivada Direcional como Taxa de Variação . . . . . . . . . . . 1697.3 Gradiente de uma Função . . . . . . . . . . . . . . . . . . . . . 170

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 7/407
CONTEÚDO 7
7.4 Observações Geométricas sobre Gradientes . . . . . . . . . . . 1757.5 Funções Implícitas . . . . . . . . . . . . . . . . . . . . . . . . . 1837.6 Gradiente e Conjuntos de Nível . . . . . . . . . . . . . . . . . . 1867.7 Gradiente e Curvas de Nível . . . . . . . . . . . . . . . . . . . 1877.8 Ângulo entre Curvas . . . . . . . . . . . . . . . . . . . . . . . . 1907.9 Gradiente e Superfícies de Nível . . . . . . . . . . . . . . . . . 192
7.10 Ângulo entre Superfícies . . . . . . . . . . . . . . . . . . . . . 1997.11 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
8 MÁXIMOS E MÍNIMOS 2098.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2098.2 Determinação dos Extremos Locais . . . . . . . . . . . . . . . . 215
8.2.1 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . 2218.3 Problemas de Otimização . . . . . . . . . . . . . . . . . . . . . 227
8.3.1 Mínimos Quadrados . . . . . . . . . . . . . . . . . . . . 2318.4 Máximos e Mínimos Absolutos . . . . . . . . . . . . . . . . . . 236
8.5 Método dos Multiplicadores de Lagrange . . . . . . . . . . . . 2408.6 Determinação dos Extremos Condicionados . . . . . . . . . . 2428.7 Problemas de Otimização . . . . . . . . . . . . . . . . . . . . . 249
8.7.1 Generalização do Método . . . . . . . . . . . . . . . . . 2578.8 Método de Lagrange e Álgebra Linear . . . . . . . . . . . . . . 2588.9 Eliminação do Parâmetro . . . . . . . . . . . . . . . . . . . . . 2608.10 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
9 INTEGRAÇÃO DUPLA 2719.1 Integração Dupla sobre Retângulos . . . . . . . . . . . . . . . . 271
9.2 Significado Geométrico da Integral Dupla . . . . . . . . . . . . 2729.3 Integrais Iteradas . . . . . . . . . . . . . . . . . . . . . . . . . . 2759.4 Teorema de Fubini . . . . . . . . . . . . . . . . . . . . . . . . . 2779.5 Extensão do Teorema de Fubini . . . . . . . . . . . . . . . . . . 2829.6 Integração Dupla sobre Regiões mais Gerais . . . . . . . . . . 2849.7 Regiões Elementares . . . . . . . . . . . . . . . . . . . . . . . . 284
9.7.1 Regiões de tipo I . . . . . . . . . . . . . . . . . . . . . . 2849.7.2 Regiões de tipo II . . . . . . . . . . . . . . . . . . . . . . 2859.7.3 Regiões de tipo III . . . . . . . . . . . . . . . . . . . . . 285
9.8 Extensão da Integral Dupla . . . . . . . . . . . . . . . . . . . . 288
9.9 Integral Dupla e Volume de Sólidos . . . . . . . . . . . . . . . 2899.9.1 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . 2909.10 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 8/407
8 CONTEÚDO
10 MUDANÇA DE COORDENADAS 30310.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30310.2 Jacobiano da Mudança de Coordenadas . . . . . . . . . . . . . 30510.3 Mudança de Coordenadas e Integrais Duplas . . . . . . . . . . 30710.4 Mudança Linear de Coordenadas . . . . . . . . . . . . . . . . . 30810.5 Mudança Polar de Coordenadas . . . . . . . . . . . . . . . . . 314
10.6 Regiões Limitadas por Círculos . . . . . . . . . . . . . . . . . . 31610.7 Aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32410.8 Exercícios de Mudança de Coordenadas . . . . . . . . . . . . . 32710.9 Outras Aplicações da Integral Dupla . . . . . . . . . . . . . . . 33910.10 Massa Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34010.11Momento de Massa . . . . . . . . . . . . . . . . . . . . . . . . . 340
10.11.1 Centro de Massa . . . . . . . . . . . . . . . . . . . . . . 34110.12Momento de Inércia . . . . . . . . . . . . . . . . . . . . . . . . . 34310.13Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
11 INTEGRAÇÃO TRIPLA 349
11.1 Integração Tripla sobre Paralelepípedos . . . . . . . . . . . . . 34911.2 Integrais Triplas sobre Regiões mais Gerais . . . . . . . . . . . 353
11.2.1 7.2.1 Regiões Elementares no Espaço . . . . . . . . . . . 35311.2.2 Regiões de tipo I . . . . . . . . . . . . . . . . . . . . . . 35411.2.3 Regiões de tipo II . . . . . . . . . . . . . . . . . . . . . . 35411.2.4 Regiões de tipo III . . . . . . . . . . . . . . . . . . . . . 35511.2.5 Região de tipo IV . . . . . . . . . . . . . . . . . . . . . . 355
11.3 Extensão da Integral Tripla . . . . . . . . . . . . . . . . . . . . 35711.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
12 MUDANÇA DE COORDENADAS 36512.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36512.2 Coordenadas Cilíndricas . . . . . . . . . . . . . . . . . . . . . 36712.3 Coordenadas Esféricas . . . . . . . . . . . . . . . . . . . . . . . 37512.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
13 APÊNDICE 38713.1 Limite e Continuidade . . . . . . . . . . . . . . . . . . . . . . . 38713.2 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . 38713.3 Integração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
14 RESPOSTAS 39914.1 Capítulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39914.2 Capítulo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 9/407
CONTEÚDO 9
14.3 Capítulo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40114.4 Capítulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40114.5 Capítulo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40114.6 Capítulo 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40214.7 Capítulo 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40314.8 Capítulo 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
14.9 Capítulo 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40314.10 Capítulo 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
Bibliografia 405

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 10/407
10 CONTEÚDO
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 11/407
Capítulo 1
GEOMETRIA ANALÍTICA
1.1 Introdução
Neste capítulo estabeleceremos os conceitos básicos para o estudo do Cál-culo em várias variáveis. Não pretendemos fazer um estudo detalhado devetores ou de Geometria Analítica, mas recomendamos aos leitores, consul-tar a bibliografia como complemento necessário deste capítulo.
1.2 Espaços Euclidianos
O espaço euclidiano n-dimensional (n ∈ N) é o produto cartesiano de nfatores iguais a R:
Rn = R× R× . . . . . . × R.
1. Se n = 1, R1 = R é a reta coordenada.
2. Se n = 2, R2 é o plano ccordenado.
3. Se n = 3, R3 é o espaço coordenado tridimensional.
1.3 O Espaço Euclidiano Tridimensional
O espaço euclidiano tridimensional é definido pelo conjunto:
R3 = {(x,y,z ) / x, y, z ∈ R}.
11

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 12/407
12 CAPÍTULO 1. GEOMETRIA ANALÍTICA
Logo, os elementos de R3 são ternos ordenados. Dados (x,y,z ) ∈ R3 e(x1, y1, z 1) ∈ R3, tem-se (x,y,z ) = (x1, y1, z 1) se, e somente se, x = x1, y = y1
e z = z 1.
Em R3 podem ser definidas duas operações.
Definição 1.1. Dados (x,y,z ), (x1, y1, z 1) ∈ R3 e β ∈ R, definimos:
1. Adição de elementos de R3:
(x,y,z ) + (x1, y1, z 1) = (x + x1, y + y1, z + z 1).
2. Multiplicação de elementos de R3 por escalares de R:
β (x,y,z ) = (β x, β y, β z ).
Estas duas operações satisfazem às seguintes propriedades:
Proposição 1.1. Dados x, y, z e 0 = (0, 0, 0) elementos de R3 e α, β ∈ R;
então:
1. x + y = y + x
2. (x + y) + z = x + (y + z)
3. x + 0 = 0 + x = x.
4. α (β x) = (α β )x
5. β (x + y) = β x + β y
6. (α + β )x = α x + β x
7. 1 · x = x · 1 = x
8. ∃ − x ∈ R3 tal que x + (−x) = (−x) + x = 0.
9. Se x = (x,y,z ), então −x = (−x, −y, −z )
Observação 1.1. Em geral, um conjunto onde são definidas as operaçõesde adição e multiplicação por um número real (escalar), como na definiçãoanterior, satisfazendo às propriedades anteriores é chamado espaço vetorialsobre R e seus elementos são chamados vetores. Logo, R3 é um espaçovetorial (de dimensão 3) sobre R.
De forma analoga, R2 é um espaço vetorial de dimensão 2 sobre R.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 13/407
1.4. SISTEMA DE COORDENADAS ORTOGONAIS NO ESPAÇO 13
1.4 Sistema de Coordenadas Ortogonais no Es-paço
Escolhamos três retas mutuamente perpendiculares e denotemos por 0 oponto de interseção das retas, chamado origem. Estas retas, ditas eixos co-ordenados, são designadas como o eixo dos x, eixo dos y e eixo dos z , res-pectivamente.Os eixos dos x e dos y formam um plano horizontal e o eixo dos z é orto-gonal a este plano. Os planos que contem os eixos coordenados, chamadosplanos coordenados, são: plano xy se contem os eixos dos x e dos y ; planoxz se contem os eixos dos x e dos z e plano yz se contem os eixos dos y e dosz .
Os planos coordenados dividem o espaço em oito partes chamadas octantes.Um terno ordenado de números reais (x,y,z ) está associado a um únicoponto P do sistema de coordenadas.
A distância do ponto P ao plano yz é a coordenada x de P , a distância doponto P ao plano xz é a coordenada y de P e a distância do ponto P aoplano xy é a coordenada z de P . Estas três coordenadas são as coordenadasretangulares do ponto P e determinam uma correspondência um a um entreternos ordenados e pontos do sistema de coordenadas. Ao 0 está associadoo terno (0, 0, 0).
P
x
y
z
0
(x,y)
Figura 1.1:
Observações 1.1.
1. Os elementos de R3 são denominados pontos ou vetores, com o se-guinte cuidado: (x,y,z ) ∈ R3 é um vetor que tem a origem em (0, 0, 0)e extremidade em (x,y,z ).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 14/407
14 CAPÍTULO 1. GEOMETRIA ANALÍTICA
2. (x,y,z ) e é também chamado vetor posição de (x,y,z ).
3. Para ter uma melhor distinção denotaremos os vetores de forma dife-rente da dos pontos. Por exemplo 0 = (0, 0, 0) é o vetor nulo.
(x,y,0)
(x,y,z)
z
x
0 y
Figura 1.2:
Dados P 1 = (x1, y1, z 1) e P 2 = (x2, y2, z 2), o vetor v determinado por−−→P 1P 2 é:
v = P 2 − P 1 = (x2 − x1, y2 − y1, z 2 − z 1)
O vetor v =−→OP é o vetor posição do ponto P .
Exemplos 1.1.
[1] Se P 1 = (3, 2, 1) e P 2 = (−2, 1, −5), determine−−→P 1P 2.
Da definição:
−−→P 1P 2 = (−2, 1, −5) − (3, 2, 1) = (−5, −1, −6).
[2] Se P 1 = (√
2, 1, π) e P 2 = (2, 1, 2 π), determine−−→P 1P 2.
Da definição:
−−→P 1P 2 = (2, 1, 2 π) − (
√ 2, 1, π) = (2 −
√ 2, 0, π).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 15/407
1.5. PRODUTO ESCALAR 15
1.5 Produto Escalar
Definição 1.2. Sejam u = (u1, u2, u3) e v = (v1, v2, v3) vetores em R3. Oproduto escalar de u e v, denotado por u · v (ou < u, v >) é definido por:
u · v = u1 v1 + u2 v2 + u3 v3
Analogamente se define o produto escalar de vetores em R2.
Proposição 1.2. Sejam v, u, w ∈ R3 e β ∈ R, então:
1. v · v ≥ 0
2. v · v = 0 se e somente se, v = 0.
3. v · u = u · v.
4. v
· 0 = 0.
5. (β u) · v = u · (β v) = β ( u · v).
6. w · ( u + v) = ( w · u) + ( w · v).
As propriedades podem ser provadas diretamente da definição.
Definição 1.3. O vetor v é ortogonal a w se e somente se
v· w = 0
O vetor 0 é o único vetor ortogonal a todos os vetores de R3. Se w ∈ R2 e w = (x, y), então os vetores (−y, x) e (y, −x) são ortogonais a w.
1.6 Norma Euclidiana de um Vetor
Definição 1.4. Seja v = (v1, v2, v3) ∈ R3. A norma euclidiana de v é denotadapor v e definida por:
v = √ v · v =
v21 + v
22 + v
23
O vetor v é dito unitário se v = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 16/407
16 CAPÍTULO 1. GEOMETRIA ANALÍTICA
Proposição 1.3.
1. Se w = 0 não é unitário, então o vetor definido por:
v = w
w
,
é unitário e tem a mesma direção de w.
2. Se θ é o ângulo formado pelos vetores v e u, então:
v · u = v u cos(θ).
A propriedade 1, pode ser provada diretamente da definição. A segunda,aplicamos a lei dos co-senos ao triângulo da figura, temos:
u− v2 = u2 + v2 − 2 u v cos(θ).
v
u-v
O
u
θ
Figura 1.3:
u2 = u · u; temos:
u− v · u− v
= u · u+ v · v− 2 u v cos(θ); logo,
u · u− u · v− v · u + v · v = u · u + v · v− 2 u v cos(θ);
então, u · v = u v cos(θ).
Três vetores de R3
tem um destaque especial, a saber:
i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 17/407
1.7. ÂNGULOS DIRETORES E CO-SENOS DIRETORES 17
0
k
j
i
Figura 1.4: Os vetores i, j e k.
Os vetores i, j e k são unitários e mutuamente ortogonais. O conjunto{ i, j, k} é dito a base canônica do R3. Para todo v = (v1, v2, v3) ∈ R3 te-mos:
v = v1
i + v2
j + v3
k
1.7 Ângulos Diretores e Co-senos Diretores
Os ângulos diretores de um vetor não nulo v = (v1, v2, v3) são os ângulos α,β e γ , no intervalo [0, π] que v forma com os eixos coordenados.
γ
α
β
y
z
x
Figura 1.5:
Os co-senos desses ângulos diretores, cos(α), cos(β ) e cos(γ ) são chamadosco-senos diretores do vetor v. Pelas propriedades do produto escalar, temos:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 18/407
18 CAPÍTULO 1. GEOMETRIA ANALÍTICA
cos(α) = v · i
v i = v1 v =
v1 v21 + v2
2 + v23
,
cos(β ) = v · j
v j=
v2 v =
v2
v21 + v2
2 + v23
e
cos(γ ) = v · k
v k=
v3 v =
v3 v21 + v2
2 + v23
.
O vetor v fica univocamente determinado conhecendo seu comprimento eseus ângulos diretores. De fato:
v1 = v cos(α), v2 = v cos(β ) e v3 = v cos(γ ).
Note que cos2(α) + cos2(β ) + cos2(γ ) = 1.
Exemplos 1.2.
[1] Sejam v = (1, 2, 3) e w = (−2, 1, 3). Determine v · w e os vetores unitáriosnas direções de v e w, respectivamente.
Primeiramente calculamos v · w = −2 + 2 + 9 = 9. Agora devemos determi-nar:
v
v e
w
w.
v =√
1 + 4 + 9 =√
14 e w =√
4 + 1 + 9 =√
14; logo,
1√ 14
, 2√
14,
3√ 14
e − 2√
14,
1√ 14
, 3√
14
,
são os vetores unitários nas direções de v e w, respectivamente.
[2] Sejam v = (x, −2, 3) e u = (x,x, −5). Determine o valor de x para que ve u sejam ortogonais.
Da definição v e u são ortogonais se v · u = 0; então, v · u = x2−2 x−15 = 0,equação que tem soluções x = 5 e x = −3; logo: v = (5, −2, 3) e u =(5, 5, −5) são ortogonais e v = (−3, −2, 3) e u = (−3, −3, −5) são ortogonais.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 19/407
1.8. PRODUTO VETORIAL 19
[3] Sejam P 1 = (3, −2, −1), P 2 = (1, 4, 1), P 3 = (0, 0, 1) e P 4 = (−1, 1, −1).Determine o ângulo formado pelos vetores
−−→P 1P 2 e
−−→P 3P 4.
Sejam v =−−→P 1P 2 = (1 − 3, 4 + 2, 1 + 1) = (−2, 6, 2) e w =
−−→P 3P 4 = (−1, 1, −2).
O ângulo formado por v e w é:
cos(θ) =
v
· w
v w = 2
33 .
[4] Calcule os co-senos diretores de u = (−2, 1, 2).
Como u = 3, cos(α) = −2
3, cos(β ) =
1
3 e cos(γ ) =
2
3.
1.7.1 Trabalho
Suponha que uma força constante F move uma partícula de um ponto P atéum ponto Q. O trabalho realizado pela partícula é dado por:
W = F · −→P Q
Se a unidade de comprimento é dada em metros e a força é dada em New-tons, o trabalho é dado em Joules (J ).
Exemplos 1.1.
Uma força dada por F = (1, 2, 3) move uma partícula do ponto (1, 1, 1) aoponto (4, 2, 3); logo: W = (1, 2, 3) · (3, 1, 2) = 3 + 2 + 6 = 11 J .
1.8 Produto VetorialDefinição 1.5. Dados v = (v1, v2, v3) e w = (w1, w2, w3) vetores em R3, oproduto vetorial de v e w, denotado por v× w é definido por:
v × w =
v2 v3w2 w3
i−v1 v3w1 w3
j +
v1 v2w1 w2
k
Logo, da definição segue:
v × w =
v2 w3 − v3 w2
i +
v3 w1 − v1 w3
j +
v1 w2 − v2 w1
k.
Proposição 1.4. Sejam v, w e u vetores do R3 e β ∈ R. Então:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 20/407
20 CAPÍTULO 1. GEOMETRIA ANALÍTICA
1. v× v = 0.
2. 0 × v = v× 0 = 0.
3. v× w = − w × v.
4. v× ( w + u) = v × w + v× u.
5. β v× w = v × β w = β ( v× w).
6.
v
× w
=
v
w
sen(θ), onde θ é o ângulo formado por v e w.
7. Os vetores v e w são paralelos se e somente se v× w = 0.
8. O vetor v × w é ortogonal aos vetores v e w.
9. A área do paralelogramo determinado por v e w é v× w.
v
w
θ
Figura 1.6:
10. Identidade de Lagrange: v× w2 = v2 w2 − ( v · w)2.
11.
u · ( v× w) =
u1 u2 u3
v1 v2 v3w1 w2 w3
12. O volume do paralelepípedo determinado pelos vetores u, v e w édado por
V = | u · ( v× w)|.
Prova: As provas seguem diretamente das definições.
De fato, vejamos por exemplo:
7. Se v× w = 0 o ângulo formado pelos vetores é zero ou π; logo, os vetores
são paralelos.9. A base do paralelogramo é v e sua altura é w sen(θ), onde θ é oângulo entre v e w.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 21/407
1.8. PRODUTO VETORIAL 21
10. v × w2 = v2 w2 sen2(θ) = v2 w2 (1 − cos2(θ)) = | v2 w2 −( v · w)2.
12. A área da base é A = v × w; seja θ o ângulo formado por u e v × w;logo, a altura do paralelepípedo é h = u |cos(θ)|; então, V = | u · ( v× w)|.
Exemplos 1.2.
[1] Sejam v = (−3, −2, 2) e w = (−1, 1, 2). Calcule v × w, ( w × v) × v e( w × v) × u.
Da definição e das propriedades temos:
v× w = (−6, 4, −5) e ( w× v)× v = (2, −27, −24) e ( w× v)× w = (−13, −18, 2).
[2] Calcule i× j, i× k, j × k e ( i× j) × ( j× k).
Da definição temos: i × j = (0, 0, 1) = k, i × k = (0, −1, 0) = − j, j × k =
(1, 0, 0) = ie ( i× j) × ( j × k) = k× i = j.
[3] Calcule a área do triângulo determinado por P = (2, 2, 0), Q = (−1, 0, 2)e R = (0, 4, 3).
A área do triângulo é a metade da área do paralelogramo determinado por u =
−→P Q e v =
−→P R; logo:
A = u× v
2 =
(−10, 5, −10)2
= 15
2 .
[4] Calcule o volume do paralelepípedo determinado pelos vetores u =(2, −3, 4), v = (1, 2, −1) e w = (3, −1, 2).
Como v× w = (3, −5, −7), temos V = | u · ( v × w)| = | − 7| = 7.
[5] Determine o valor de k tal que u = (2, −1, 1), v = (1, 2, −3) e w = (3, k, 5)sejam coplanares.
Se u, v e w são coplanares, então, u · ( v × w) = 0; caso contrário, determi-nariam um paralelepípedo e, portanto, os vetores não poderiam ser copla-nares.
v× w = (10 + 3 k, −14, k − 6);
logo, u · ( v × w) = 7 k + 28; resolvendo 7 k + 28 = 0, temos k = −4.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 22/407
22 CAPÍTULO 1. GEOMETRIA ANALÍTICA
1.8.1 Torque
Se uma força F age num ponto de um corpo rígido, de vetor posição r,então essa força tende a girar o corpo em torno de um eixo que passa pelaorigem do vetor posição e é perpendicular ao plano de r e F . O vetor torque(relativo à origem) é dado por:
τ = r × F .
O torque fornece uma medida do efeito de um corpo rígido ao rodar emtorno de um eixo. A direção de τ indica o eixo de rotação.
Exemplos 1.3.
[1] Uma força F = (2, 5, 8) age num ponto de um corpo rígido, de coorde-nadas (1, 1, 2). Calcule o torque.
Da definição r = (1, 1, 2); logo, τ = r×
F = (1, 1, 2)×
(2, 5, 8) = (−
2,−
4, 3).A direção de (−2, −4, 3) indica o eixo de rotação.
[2] Um parafuso é apertado aplicando uma força de 300 N com uma chavede 0.45 m de comprimento fazendo um ângulo de
π
4 como na figura. Deter-
mine o módulo do torque em torno do centro do parafuso.
Figura 1.7:
Comos τ = r × F = r F sen(α); temos que r = 0.45, F = 300 e
senπ
4
=
√ 2
2 , temos, τ = 67.5
√ 2 J .
1.9 Distância emR3
Definição 1.6. Sejam P 1 = (x1, y1, z 1) e P 2 = (x2, y2, z 2) pontos do R3. Adistância entre P 1 e P 2 é denotada e definida por:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 23/407
1.10. RETAS 23
d0(P 1, P 2) =
(x1 − x2)2 + (y1 − y2)2 + (z 1 − z 2)2
Em particular, se P = (x,y,z ):
d0(0, P ) = −→0P =
x2 + y2 + z 2
Proposição 1.5. Sejam P 1, P 2 e P 3 pontos do R3, então:
1. d0(P 1, P 2) > 0
2. d0(P 1, P 2) = 0 ⇐⇒ P 1 = P 2.
3. d0(P 1, P 2) = d0(P 2, P 1)
4. Desiguladade triangular:
d0(P 1, P 3) ≤ d0(P 1, P 2) + d0(P 2, P 3).
1.10 Retas
Sejam P = (x1, y1, z 1) um ponto e v = (v1, v2, v3) um vetor em R3. A reta quepassa pelo ponto P e tem direção v é dada, parametricamente, por:
P (t) = P + t v, t ∈ R
Em coordenadas:
x(t) = x1 + t v1
y(t) = y1 + t v2
z (t) = z 1 + t v3, t ∈ R.
Dados P 1 = (x1, y1, z 1) e P 2 = (x2, y2, z 2) em R3, vamos obter a equação dareta que passa por P 1 e P 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 24/407
24 CAPÍTULO 1. GEOMETRIA ANALÍTICA
P
1
2
z
O
x
y
P
Figura 1.8: A reta que passa por P 1 e P 2.
A direção da reta é dada por v =−−→P 1P 2; logo, as equações paramétricas são:
x(t) = x1 + t (x2 − x1)
y(t) = y1 + t (y2 − y1)
z (t) = z 1 + t (z 2
−z 1), t
∈R.
Exemplos 1.4.
[1] Determine a equação da reta que passa pelo ponto (1, −1, 1) e tem a di-reção do vetor (2, 1, 3). Ache outro ponto da reta.
Sejam P = (1, −1, 1) e v = (2, 1, 3); logo,
x(t) = 1 + 2 t
y(t) = −1 + t
z (t) = 1 + 3 t,
t ∈ R. Fazendo, por exemplo, t = 1 na equação da reta, temos que (3, 0, 4) éum ponto da reta.
-2.5
0
2.5
5
-20
2
-5
0
5
-2.5
0
2.5
5
-2
Figura 1.9: A reta do exemplo [1].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 25/407
1.10. RETAS 25
[2] Determine a equação da reta que passa pelos pontos P 1 = (−2, −1, 3) eP 2 = (3, 2, 7).
A direção da reta é v =−−→P 1P 2 = (5, 3, 4); logo a equação é:
x(t) = −2 + 5 t
y(t) = −
1 + 3 t
z (t) = 3 + 4 t, t ∈ R.
-5
0
5
-50
5
-5
0
5
-5
0
5
-5
Figura 1.10: A reta do exemplo [2].
1.10.1 Paralelismo e Perpendicularismo
Sejam l1 e l2 retas de direções v1 e v2, respectivamente; então:
1. l1 é paralela a l2 se, e somente se, v1 × v2 = 0.
2. l1 é perpendicular a l2 se, e somente se, v1
· v2 = 0.
A prova segue diretamente das definições.
Exemplos 1.5.
[1] As retas
x = 1 + 2 t
y = −3 + 6 t
z = 1 + 4 t
e
x = 4 − t
y = −3 t
z = −5 − 2 t
são paralelalas. De fato, v1 = (2, 6, 4), v2 = (−1, −3, −2) e v1 × v2 = 0.
[2] As retas
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 26/407
26 CAPÍTULO 1. GEOMETRIA ANALÍTICA
x = 1 + 2 t
y = −3 + 6 t
z = 1 + 4 t
e
x = 5 − t
y = 3 + t
z = −5 − t
são perpendiculares. De fato, v1 = (2, 6, 4), v2 = (−1, 1, −1) e v1 · v2 = 0.
[3] As retas
x = 1 + 2 t
y = −2 + 3 t
z = 4 + t
e
x = 5 t
y = 3 + 2 t
z = −3 + 3 t
não são paralelas nem perpendiculares e não se intersectam. Tais retas sãoditas reversas.
-5
0
5
10
-50
5
-5
0
5
-5
0
5
10
-50
Figura 1.11: As retas do exemplo [3].
1.10.2 Forma Simétrica da Equação da RetaEliminando o parâmetro t na equação da reta, obtemos a forma simétrica daequação da reta:
x − x1
v1=
y − y1v2
= z − z 1
v3
sendo os vi = 0 (1 ≤ i ≤ 3). Se, por exemplo, v1 = 0, obtemos:
x = x1,
y
−y1
v2 =
z
−z 1
v3 ;
os outros casos são análogos.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 27/407
1.11. PLANOS 27
1.10.3 Distância de um Ponto a uma Reta
Seja P um ponto que não pertence à reta que passa pelos pontos Q e R. Adistância do ponto P à reta é:
d1 = v× w
v
onde v =−→QR e w =
−→QP . A prova deste fato fica como exercício.
Exemplos 1.6.
[1] Ache a distância do ponto P = (2, 1, −1) à reta que passa pelos pontosQ = (2, 0, 1) e R = (−2, −2, 1).
Como v =−→QR = (−4, −2, 0), w =
−→QP = (0, 1, −2); logo,
d1 = v
× w
v = 24
5 .
1.11 Planos
Definição 1.7. Sejam o vetor n = 0 e o ponto P 0 = (x0, y0, z 0) ∈ R3, fixado.O conjunto de todos os pontos P = (x,y,z ) ∈ R3 tais que:
n · −−→P 0P = 0
é chamado plano passando por P 0 e tendo normal n. Em particular, se n = (a,b,c), o plano passando por P 0 e de normal n, tem a equação emcoordenadas:
a (x − x0) + b (y − y0) + c (z − z 0) = 0
Exemplos 1.7.
[1] Determine a equação do plano que passa pelo ponto (1, −1, 1) e é normalao vetor (−1, 2, 3).
Sejam P 0 = (1, −1, 1) e n = (−1, 2, 3); então:
−1 (x − 1) + 2 (y + 1) + 3 (z − 1) = −x + 2 y + 3 z.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 28/407
28 CAPÍTULO 1. GEOMETRIA ANALÍTICA
A equação é −x + 2 y + 3 z = 0.
-1
0
1
-1
0
1
-1
0
1
-1
0
1
-1
0
Figura 1.12: Exemplo [1].
[2] Ache a equação do plano que passa pelo ponto (1, −1, −1) e é normal aovetor (3, 2, −3).
Sejam P 0 = (1, −1, −1) e n = (3, 2, −3); então: 3 (x−1)+2(y +1)−3 (z +1) =
3 x + 2 y − 3 z − 4.A equação é 3 x + 2 y − 3 z = 4.
-3
0
3
-3
0
2
-3
0
3
-3
0
2
Figura 1.13: Exemplo [2].
Considerando a equação do primeiro grau nas variáveis x, y e z :
a x + b y + c z + d = 0,
onde a, b e c ∈ R não são todas nulas, o subconjunto do R3:
P = {(x,y,z ) ∈ R3
/ a x + b y + c z + d = 0}é o plano com vetor normal n = (a,b,c).
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 29/407
1.11. PLANOS 29
Por simplicidade usaremos a expressão plano a x + b y + c z + d = 0 em lugarde, o plano de equação a x + b y + c z + d = 0.
Exemplos 1.8.
Determine a equação do plano que passa pelos pontos P 1 = (1, 1, 1),P 2 = (2, 0, 0) e P 3 = (1, 1, 0).
Qualquer vetor normal ao plano deve ser ortogonal aos vetores v =−−→P 1P 2 e
w =−−→P 2P 3, que são paralelos ao plano.
Logo, o vetor normal ao plano é n = v × w, donde n = (1, 1, 0); logo, aequação do plano é x + y + d = 0; como (2, 0, 0) pertence ao plano, temos:d = −2 e a equação é x + y − 2 = 0.
-10
1
-1
0
1
2
-1
0
1
Figura 1.14:
1.11.1 Ângulo entre Planos
Definição 1.8. O ângulo entre dois planos é o menor ângulo formado pelos
vetores normais aos planos.
Logo, se n1 e n2 são os vetores normais aos planos, então:
cos(θ) = n1 · n2
n1 n2
Exemplos 1.9.
[1] Determine o ângulo entre os planos 5 x−2 y+5 z = 12 e 2 x+y−7 z = −11.
Os vetores normais aos planos são n1 = (5, −2, 5) e n2 = (2, 1, −7), respecti-vamente; logo, cos(θ) =
n1 · n2
n1 n2 = −1
2 e θ =
2 π
3 rad.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 30/407
30 CAPÍTULO 1. GEOMETRIA ANALÍTICA
-1-0.5
0 0.51
-1
-0.50
0.51
1
1.5
2
-1-0.5
0 0.5
1
-0.50
.
Figura 1.15:
[2] Determine o ângulo entre os planos x + y − z = 0 e x − 2 y + 2 z = 0.
Os vetores normais aos planos são n1 = (1, 1, −1) e n2 = (1, −2, 2), respecti-vamente; logo:
cos(θ) = n1 · n2
n1
n2
= − 1√
3
e θ = arccos(− 1√ 3
) rad.
-1-0.5
0
0.51
-1
-0.50
0.51
-2
-1
0
1
2
-1-0.5
0
0.5
1
-0.50
.
Figura 1.16:
1.11.2 Paralelismo e Perpendicularismo entre Planos
Definição 1.9. Dois planos são paralelos se, e somente se, seus vetores nor-mais, respectivamente n1 e n2, são paralelos, isto é:
n1 × n2 = 0
Dois planos são perpendiculares se, e somente se, seus vetores normais, res-pectivamente n1 e n2, são ortogonais, isto é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 31/407
1.11. PLANOS 31
n1 · n2 = 0.
Proposição 1.6. Os planos a x + b y + c z = d e a1 x + b1 y + c1 z = d1 são:
1. paralelos, se existe k ∈ R tal que a = k a1, b = k b1 e c = k c1;
2. perpendiculares, se a a1 + b b1 + c c1 = 0.
A prova segue das definições.
Exemplos 1.10.
Determine a equação do plano paralelo ao plano 3 x + y − 6 z + 8 = 0 e quepassa pelo ponto P = (0, 0, 1).
O vetor normal ao plano é n = (3, 1, −6); logo, a equação do plano é:
3 x + y − 6 z + d = 0;
como o ponto P pertence ao plano temos −6 + d = 0, logo, a equação doplano é
3 x + y − 6 z + 6 = 0.
Observações 1.2.
1. O plano:
a x + b y + d = 0
é perpendicular ao plano xy.
2. O plano:
b y + c z + d = 0
é perpendicular ao plano yz .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 32/407
32 CAPÍTULO 1. GEOMETRIA ANALÍTICA
3. O plano:
a x + c z + d = 0
é perpendicular ao plano xz .
Figura 1.17: Planos coordenados.
1.11.3 Distância de um Ponto a um Plano
Definição 1.10. A distância do ponto P 0 = (x0, y0z 0) ao plano a x + b y + c z +d = 0 é dada por:
d2 = |a x0 + b y0 + c z 0 + d
|√ a2 + b2 + c2
Exemplos 1.11.
[1] Determine a distância do ponto (1, 1, −5) ao plano:
12 x + 13 y + 5 z + 2 = 0.
Aplicando diretamente a fórmula: d2 =
√ 2
13
.
[2] Determine a distância entre os planos paralelos: x + 2 y − z = 8 e 4 x +8 y − 4 z = 10.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 33/407
1.12. GENERALIZAÇÕES 33
A distância entre dois planos paralelos é a distância entre um ponto qual-quer do plano x + 2 y − z = 8 ao plano 4 x + 8 y − 4 z = 10.
O ponto (1, 4, 1) pertence ao plano x + 2 y − z = 8. A distância do ponto(1, 4, 1) ao plano 4 x + 8 y − 4 z = 10 é:
d2 = |4 + 32 − 4 − 10|
√ 16 + 64 + 16=
11
2 √ 6.
Em geral, se a x + b y + c z = d e a x + b y + c z = d1 são planos paralelos, adistânciaentre os planos é:
d3 = |d1 − d|√
a2 + b2 + c2
1.12 Generalizações
Podemos fazer as seguintes generalizações para Rn, n ≥ 3.
Os pontos x ∈ Rn são x = (x1, x2, x3,....,xn) onde xi ∈ R.
Dados x,y ∈ Rn, dizemos que:
x = y ⇐⇒ xi = yi,
para todo i = 1,....,n. (0, ......., 0) é a origem do Rn.
Em Rn podem ser definidas duas operações.
Dados x = (x1, x2, x3,....,xn),y = (y1, y2, y3,....,yn) ∈ Rn e β ∈ R:
Adição de elementos de Rn:
x + y = (x1 + y1, x2 + y2, ........, xn + yn).
Multiplicação de elementos de Rn por escalares de R:
β · x = (β · x1, β · x2, .........., β · xn).
Estas duas operações satisfazem as propriedades análogas às enunciadaspara R3.
Logo, Rn é um espaço vetorial de dimensão n sobre R.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 34/407
34 CAPÍTULO 1. GEOMETRIA ANALÍTICA
Os elementos do Rn são denominados pontos ou vetores, com o seguintecuidado:
v ∈ Rn
é um vetor que tem a origem em (0, ......., 0) e extremidade em v.
Para ter uma melhor distinção denotaremos os vetores de forma diferenteda utilizada para os pontos. Por exemplo, 0 = (0, ......., 0) é o vetor nulo.
1.12.1 Produto Escalar
Se u = (u1, u2, u3,....,un) e v = (v1, v2, v3,....,vn) são vetores doRn, o produtoescalar de u e v, denotado por u · v é definido por:
u · v = u1 · v1 + u2 · v2 + ......... + un · vn.
O produto escalar tem as seguintes propriedades:
1. (β u) · v = u · (β v) = β ( u · v).
2. w · ( u + v) = ( w · u) + ( w · v).
3. v é ortogonal a w se, e somente se, u · v = 0.
Norma euclidiana: Se v ∈ Rn não é nulo:
v =√
v · v.
Distância: Se x = (x1, x2,....,xn) e y = (y1, y2,....,yn) são pontos do Rn,então:
d(x,y) = x− y =
(x1 − y1)2 + (x2 − y2)2 + ........ + (xn − yn)2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 35/407
1.13. EXERCÍCIOS 35
1.13 Exercícios
1. Determine v =−−→P 1P 2, se:
(a) P 1 = (1, 2, 1), P 2 = (−5, 3, 1)
(b) P 1 = (
−3, 2,
−1), P 2 = (15, 2, 6)
(c) P 1 = (12, 222, 1), P 2 = (5, 23, 11)
(d) P 1 = (4, 24, 18), P 2 = (−25, 23, 11)
(e) P 1 = (9, 3, 1), P 2 = (9, −3, 2)
(f) P 1 = (0, 12, −11), P 2 = (5, 2, 16)
(g) P 1 = (1, 1, 1), P 2 = (5, 3, 0)
(h) P 1 = (14, −12, 11), P 2 = (−1, 9, −1)
(i) P 1 = (−6, −4, 1), P 2 = (−2, 2, −6)
(j) P 1 = (4,−
2, 20), P 2 = (3, 9, 9)
(k) P 1 = (−16, 14, 1), P 2 = (2, −2, 6)
(l) P 1 = (3, 3, 1), P 2 = (6, −9, 3)
(m) P 1 = (6, −4, 6), P 2 = (4, 2, 6)
(n) P 1 = (11, 23, 2), P 2 = (3, 0, 3)
(o) P 1 = (2, 2, −6), P 2 = (1, −4, −2)
2. Determine v · w e os vetores unitários nas direções de v e w, se:
(a) v = (1, 2, 1), w = (−5, 3, 1)
(b) v = (−3, 2, −1), w = (1, 2, −6)
(c) v = (2, −2, 2), w = (−2, 2, 1)
(d) v = (4, 1, 8), w = (−2, −23, −1)
(e) v = (√
5, −3, 6), w = (−9, −3, 2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)
(h) v = (
−1,
−1,
−1), w = (7,
−3, 2)
(i) v = (4, −2, 11), w = (−1, 0, −1)
(j) v = (−6, −4, 1), w = (−2, 2, −6)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 36/407
36 CAPÍTULO 1. GEOMETRIA ANALÍTICA
(k) v = (4/3, −1, 1), w = (−2/5, 5, −1)
(l) v = (4/5, 4, 1/6), w = (2/3, −1, 3/4)
3. Determine o ângulo formado pelos vetores v e w, se:
(a) v = (−1, 2, −1), w = (−5, 3, 1)(b) v = (−1, −2, −1), w = (1, −2, −6)
(c) v = (2, −2, −2), w = (−1, 2, 1)
(d) v = (1, 1, −8), w = (−2, −3, −1)
(e) v = (5, −2, −6), w = (−8, 3, −2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)
(h) v = (−1, −1, −1), w = (7, −3, 2)
(i) v = (4, −2, −1), w = (1, 0, 1)(j) v = (−6, −4, 1), w = (−2, 2, 0)
4. Determine o valor k tal que os seguintes vetores sejam ortogonais:
(a) v = (3, −2 k, 4), w = (1, 2, 5)
(b) v = (−1, 1, k), w = (1, −1, 1)
(c) v = (−k, −1, −1), w = (3, 0, 1)
(d) v
= (k, 1, k), w
= (−2, k, −k)
5. Determine v× w, se:
(a) v = (−1, 2, −1), w = (−5, 3, 1)
(b) v = (−1, −2, −1), w = (1, −2, −6)
(c) v = (2, −2, −2), w = (−1, 2, 1)
(d) v = (1, 1, −8), w = (−2, −3, −1)
(e) v = (5,
−2,
−6), w = (
−8, 3,
−2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 37/407
1.13. EXERCÍCIOS 37
(h) v = (−1, −1, −1), w = (7, −3, 2)
(i) v = (4, −2, −1), w = (1, 0, 1)
(j) v = (−6, −4, 1), w = (−2, 2, 0)
(k) v = (0, 1, −1), w = (2, 0, 1)
(l) v = (1, 0, 1), w = (3, 2, 1)
(m) v = (3, 1, 2), w = (−6, 2, −1)
(n) v = (1, 4, 2), w = (−1, 2, −1)
(o) v = (1/3, 2, 1), w = (4, 2/4, 3)
(p) v = (1/2, 1, 3/5), w = (4/3, 2, −1/5)
6. Determine o valor de k tais que os seguintes vetores sejam coplanares:
(a) u = (1, 2, −3), v = (1, k, 1) e w = (3, 2, 1)
(b) u = (−1, k, 2), v = (3, 2, 5) e w = (−1, 0, 1)
(c) u = (1, k, 0), v = (1, 2, 1) e w = (1, 0, k)
(d) u = (0, 1, −1), v = (k, 0, 1) e w = (1, 1, 2 k)
7. Determine a área do triângulo P QR, se:
(a) P = (1, −1, 2), Q = (0, 3, −1), R = (3, −4, 1)
(b) P = (−3, 0, 5), Q = (2, −1, −3), R = (4, 1, −1)
(c) P = (4, 0, 0), Q = (0, 5, 0), R = (0, 0, 2)(d) P = (−1, 2, 0), Q = (0, 2, −3), R = (5, 0, 1)
8. Determine o volume do paralelepípedo formado por−→P Q,
−→P R e
−→P T :
(a) P = (0, 0, 0), Q = (1, −1, 2), R = (0, 3, −1), T = (3, −4, 1)
(b) P = (2, 1, −1), Q = (3, 0, 2), R = (4, −2, 1), T = (5, −3, 0)
9. Determine d(P 1P 2), se:
(a) P 1 = (1, 2, 1), P 2 = (−5, 3, 1)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 38/407
38 CAPÍTULO 1. GEOMETRIA ANALÍTICA
(b) P 1 = (−3, 2, −1), P 2 = (15, 2, 6)
(c) P 1 = (12, 222, 1), P 2 = (5, 23, 11)
(d) P 1 = (4, 24, 18), P 2 = (−25, 23, 11)
(e) P 1 = (9, 3, 1), P 2 = (9, −3, 2)
(f) P 1 = (0, 12,
−11), P 2 = (5, 2, 16)
(g) P 1 = (1, 1, 1), P 2 = (5, 3, 0)
(h) P 1 = (1, 1, −1), P 2 = (7, 3, 1)
(i) P 1 = (14, −12, 11), P 2 = (−1, 9, −1)
(j) P 1 = (−6, −4, 1), P 2 = (−2, 2, −6)
(k) P 1 = (4, −2, −6), P 2 = (4, −9, 4)
(l) P 1 = (2, −4, 5), P 2 = (2, −2, −4)
(m) P 1 = (9, −3, 2), P 2 = (6, 9, 1)
(n) P 1 = (9, 0, 5), P 2 = (−
5, 2, 1)
10. Verifique que para todo v e w ∈ Rn; tem-se:
(a) | v · w| ≤ v w(b) v + w ≤ v + w(c) 2 u2 + 2 v2 = u + v2 + u− v2(d) u + v u− v = u2 + v2
(e) 4 u · v = u + v2 − u− v2
11. Sejam P 1 = (2, 9, 8), P 2 = (6, 4, −2) e P 3 = (7, 15, 7).
Verifique que−−→P 1P 2 e
−−→P 1P 3 são ortogonais e determine um ponto P
tal que P 1, P 2, P e P 3 formem um retângulo.
12. Sejam P 1 = (5, 0, 7) e P 2 = (2, −3, 6). Determine o ponto P sobre
a reta que liga P 1 a P 2 tal que:
−−→P 1P = 3
−−→P P 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 39/407
1.13. EXERCÍCIOS 39
13. Determine a equação do plano passando pelos pontos P 1, P 2 e
P 3, sendo:
(a) P 1 = (−3, 0, 2), P 2 = (6, 1, 4), P 3 = (−5, 1, 0)
(b) P 1 = (2, 1, 4), P 2 = (1, −1, 2), P 3 = (4, −1, 1)
(c) P 1 = (1, 1, 1), P 2 = (0, −1, 1), P 3 = (2, −1, −1)(d) P 1 = (1, −1, 1), P 2 = (1, −1, −1), P 3 = (3, −1, 1)
(e) P 1 = (3, −4, 2), P 2 = (3, 3, −3), P 3 = (2, −5, 2)
(f) P 1 = (2, 3, 1), P 2 = (−3, 2, 6), P 3 = (−4, 2, 5)
(g) P 1 = (1/2, 1/3, −2), P 2 = (1, 1, 1), P 3 = (1/4, 2, −1/5)
(h) P 1 = (1, 1, 2), P 2 = (1/2, −1, 1/3), P 3 = (4/5, 0, 1/5)
14. Determine a equação do plano passando pelo ponto P = (3, −1, 2),
perpendicular à reta determinada por P 1 = (2, 1, 4) e P 2 = (−3, −1, 7).Ache a distância do ponto P ao plano.
15. Verifique que a interseção dos planos x + y − 2 z = 1 e x + 3 y − x = 4é uma reta. Ache a distância do ponto P = (1, 0, 1) a essa reta.
16. Determine a equação do plano paralelo ao plano 2 x + 3 y − 6 z = 3 eque passa pelo ponto P = (1, 1, 1).
17. Determine o plano perpendicular à reta x
2
= y − 2
2
= z + 1 e que passa
pelo ponto P = (1, 3, −1).
18. Determine a equação do plano perpendicular aos planos
x + 2 y − 7 z = 0 e x − y − z = 5 e que passa pela origem.
19. Determine a equação do plano ortogonal ao vetor (2, 3, 6) e que passapelo ponto (1, 5, 3).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 40/407
40 CAPÍTULO 1. GEOMETRIA ANALÍTICA

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 41/407
Capítulo 2SUPERFÍCIES QUÁDRICAS
2.1 Introdução
Em R3 temos dois tipos de objetos de nosso interesse: os sólidos e as super-fícies.
De forma intuitiva podemos dizer que os sólidos são os objetos de R3 quepossuem volume e as superfícies são objetos de R3 que possuem área, mastem espessura irrelevante.
Para leitores com conhecimentos mais profundos, podemos dizer que umsólido é um objeto de dimensão 3 em R3 e as superfícies são objetos de di-mensão 2 em R3.
Os sólidos nos permitem modelar, por exemplo, depósitos de combustíveis,
turbinas de aviões ou carros. As superfícies nos permitem modelar, porexemplo, folhas de papel, membranas ou lâminas de metal. As definiçõesmatemáticas destes objetos estão fora do contexto destas notas e, por isso,ficaremos com estas idéias intuitivas.
Do Cálculo de uma variável, conhecemos os sólidos de revolução. Porexemplo, o sólido de revolução obtido girando em torno do eixo dos y aregião limitada pelo gráfico de:
(x − b)2 + y2 = a2, 0 < a < b.
Veja o seguinte desenho:
41

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 42/407
42 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
Figura 2.1: Uma superfície em R3.
Os planos são exemplos de superfícies. A seguir definiremos um novo tipode superfície: as superfícies quádricas.
2.2 Superfícies Quádricas
Sabemos que o conjunto de todos os pontos (x, y) ∈ R2 que satisfazem aequação geral do segundo grau nas variáveis x e y é uma seção cônica: pa-rábola, elipse, hipérbole ou alguma forma degenerada dessas curvas, comoum ponto ou um par de retas. Em R3, a equação geral do segundo grau nasvariáveis x, y e z é F (x,y,z ) = 0, onde:
F (x,y,z ) = A x2 + B y2 + C z 2 + D x y + E x z + F y z + G x + H y + I z + J,
onde os coeficientes dos termos de segundo grau não são todos nulos, demodo que o grau da equação é 2. O subconjunto Q ⊂ R3, definido por:
Q = {(x,y,z ) ∈ R3 / F (x,y,z ) = 0}
é chamado superfície quádrica ou quádrica central.
Usando rotações e translações é possível mostrar que existem os seguintestipos de superfícies quádricas não degeneradas:
1) Elipsóides.
2) Hiperbolóide elítico ou de uma folha.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 43/407
2.3. ELIPSÓIDE 43
3) Hiperbolóide de duas folhas.
4) Parabolóide elítico.
5) Parabolóide hiperbólico.
6) Cones.
7) Cilindros.
Observações 2.1.
1. Apresentaremos as equações que definem as quádricas centradas naorigem. As outras formas mais gerais podem ser determinadas a partirde translações e rotações.
2. Uma forma básica de esboçar uma superfície quádrica é determinaros interseptos com os eixos coordenados e desenhar suas seções retas,ou seja, as interseções da superfície com os planos coordenados, tam-
bém chamadas traços da quádrica. As quádricas centrais apresentamsimetrias em relação a cada um dos planos coordenados.
3. Se na equação que define a quádrica substituimos x por −x e a equa-ção não se altera, a quádrica é simétrica em relação ao plano yz ; sesubstituimos y por −y e a equação não se altera, a quádrica é simétricaem relação ao plano xz ; se substituimos z por −z e a equação não se
altera, a quádrica é simétrica em relação ao plano xy e se substitui-mos (x,y,z ) por (−x, −y, −z ) e a equação não se altera, a quádrica ésimétrica em relação à origem
2.3 Elipsóide
A equação que representa o elipsóide de centro na origem é:
x2
a2 +
y2
b2 +
z 2
c2 = 1,
onde a, b, c ∈ R não são nulos.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 44/407
44 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
Figura 2.2: O elipsóide.
Interseções com os eixos coordenados:
Não difícil ver que:
(±
a, 0, 0), (0,±
b, 0) e (0, 0,±
c)
são as interseções com os eixos coordenados.
Simetrias:
A equação não se altera se substituimos (x,y,z ) por (−x, −y, −z ); logo, oelipsóide tem simetria em relação à origem.
Traços do elipsóide:No plano xy é a elipse:
x2
a2 +
y2
b2 = 1.
No plano yz é a elipse:
y2
b2 +
z 2
c2 = 1.
No plano xz é a elipse:
x2
a2 +
z 2
c2 = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 45/407
2.3. ELIPSÓIDE 45
Figura 2.3: O elipsóide e seus traços.
2.3.1 Esferas
Em particular se a = b = c, na equação do elipsóide, temos:
x2 + y2 + z 2 = a2
equação que representa a esfera de centro na origem e raio a.
Figura 2.4: A esfera e seus traços.
Em geral, a equação do elipsóide centrado no ponto (x0, y0, z 0) é:
(x − x0)2
a2 +
(y − y0)2
b2 +
(z − z 0)2
c2 = 1
Em particular, a equação que representa a esfera de centro em (x0, y0, z 0) eraio a é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 46/407
46 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
(x − x0)2 + (y − y0)2 + (z − z 0)2 = a2
2.4 Hiperbolóide de uma folha
A equação que representa o hiperbolóide de uma folha de centro na origemé:
x2
a2 +
y2
b2 − z 2
c2 = 1
onde a, b, c ∈ R não são nulos.
Figura 2.5: Hiperbolóide de uma folha.
Interseções com os eixos coordenados:
Não difícil ver que:
(±a, 0, 0) e (0, ±b, 0).
são as interseções com os eixos coordenados.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 47/407
2.4. HIPERBOLÓIDE DE UMA FOLHA 47
Simetrias:
Na equação não se altera se substituimos (x,y,z ) por (−x, −y, −z ); logo, ohiperbolóide tem simetria em relação à origem.
Traços do hiperbolóide de uma folha:
No plano xy é a elipse:
x2
a2 +
y2
b2 = 1.
No plano yz é a hipérbole:
y2
b2 − z 2
c2 = 1.
No plano xz é a hipérbole:
x2
a2 − z 2
c2 = 1.
Figura 2.6: Hiperbolóide de uma folha e seus traços.
As equações:x2
a2 − y2
b2 +
z 2
c2 = 1 e − x2
a2 +
y2
b2 +
z 2
c2 = 1,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 48/407
48 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
representam também hiperbolóides de uma folha. No primeiro caso o eixodo hiperbolóide é o eixo dos y e no segundo caso o eixo dos x. O termonegativo na equação indica o eixo do hiperbolóide.
Figura 2.7: Outros hiperbolóides de uma folha.
2.5 Hiperbolóide de duas folhasA equação que representa o hiperbolóide de duas folhas de centro na origemé:
−x2
a2 − y2
b2 +
z 2
c2 = 1
onde a, b, c ∈ R não são nulos.
Figura 2.8: Hiperbolóide de duas folhas.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 49/407
2.5. HIPERBOLÓIDE DE DUAS FOLHAS 49
Interseções com os eixos coordenados:
Não difícil ver que:
(0, 0, c) e (0.0 − c),
são as interseções com os eixos coordenados.
Simetrias:
A equação não se altera se substituimos (x,y,z ) por (−x, −y, −z ); logo, ohiperbolóide de duas folhas tem simetria em relação à origem.
Traços do hiperbolóide de duas folhas:
No plano xy: nenhuma.
No plano yz é a hipérbole:
−y2
b2 +
z 2
c2 = 1.
No plano xz é a hipérbole:
−x2
a2 +
z 2
c2 = 1.
Figura 2.9: Hiperbolóide de duas folhas e seus traços.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 50/407
50 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
As equações:
x2
a2 − y2
b2 − z 2
c2 = 1 e − x2
a2 +
y2
b2 − z 2
c2 = 1,
representam também hiperbolóides de duas folhas. No primeiro caso o eixodo hiperbolóide é o eixo dos x e no segundo caso o eixo dos y. O termopositivo na equação indica o eixo do hiperbolóide.
Figura 2.10: Outros hiperbolóides de duas folhas.
2.6 Parabolóide Elítico
A equação que representa o parabolóide elítico de centro na origem é:
x2
a2 +
y2
b2 − z
c = 0
onde a, b, c ∈ R não são nulos. Para c > 0, as parábolas tem a concavidadevoltada para cima. Para c > 0, o parabolóide "abre"para cima. De formaanáloga, se c < 0, o parabolóide "abre"para baixo.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 51/407
2.6. PARABOLÓIDE ELÍTICO 51
Figura 2.11: Parabolóides elíticos.
Interseções com os eixos coordenados:
(0, 0, 0) é o único ponto de interseção.
Simetrias:
a equação não se altera se substituimos x e y por −x e −y; logo, o parabo-lóide tem simetria em relação aos planos yz e xz .
Traços do parabolóide elítico:
No plano xy: o ponto (0, 0, 0).
No plano yz é a parábola:
y2
b2 − z
c = 0.
No plano xz é a parábola:
x2
a2 − z
c = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 52/407
52 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
Figura 2.12: Parabolóide elítico e seus traços.
2.7 Parabolóide HiperbólicoA equação que representa o parabolóide hiperbólico de centro na origem é:
x2
a2 − y2
b2 − z
c = 0
onde a, b, c ∈ R não são nulos. Para c < 0, as parábolas (traços no plano yz e xz ) tem a concavidade voltada para baixo.
Figura 2.13: Parabolóide hiperbólico.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 53/407
2.7. PARABOLÓIDE HIPERBÓLICO 53
Interseções com os eixos coordenados:
(0, 0, 0) é o único ponto de interseção.
Simetrias:
a equação não se altera se substituimos x e y por −x e −y; logo, o parabo-lóide hiperbólico tem simetria em relação aos planos yz e xz .
Traços do parabolóide hiperbólico:
No plano xy: é um par de retas que se intersectam na origem.
No plano yz é a parábola:
y2
b2 +
z
c = 0.
No plano xz é a parábola:
x2
a2 − z
c = 0.
Figura 2.14: Parabolóide hiperbólico e seus traços.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 54/407
54 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
2.8 Cone Elítico
A equação que representa o cone elítico de centro na origem é:
x2
a2 +
y2
b2 − z 2
c2 = 0
onde a, b, c ∈ R não são nulos.
Figura 2.15: Cone elítico.
Interseções com os eixos coordenados:
(0, 0, 0) é o único ponto de interseção.
Simetrias:a equação não se altera se substituimos (x,y,z ) por (−x, −y, −z ); logo, ocone elítico tem simetria em relação à origem.
Traços do cone elítico:
No plano xy é a origem.
No plano yz :
y2
b2 − z 2
c2 = 0,
duas retas que se intersectam na origem.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 55/407
2.9. CILINDROS 55
No plano xz :
x2
a2 − z 2
c2 = 0,
duas retas que se intersectam na origem.
Figura 2.16: Cone elítico e seus traços.
O traço em um plano z = k paralelo ao plano xy tem a equação:
x2
a2 +
y2
b2 =
k2
c2,
que representa uma elipse.
2.9 CilindrosSe C é uma curva plana e L é uma reta não situada no mesmo plano dacurva, então o conjunto de todas as retas paralelas a L e que intersectam C é chamado cilindro.
A curva C é dita diretriz do cilindro e cada reta que passa por C paralela a Lé chamada geratriz do cilindro. De acordo com a observação, o cilindro degeratrizes paralelas ao eixo dos z e tendo como diretriz uma elipse no planoxy centrada na origem, tem equação:
x2
a2 +
y2
b2 = 1
e é chamado cilindro elítico. ( a, b não são nulos).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 56/407
56 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
Figura 2.17: Cilindro elítico.
Se por exemplo a equação é:
y2
b2 − z
c = 0
obtemos o chamado cilindro parabólico. ( b, c não são nulos). Desenho àesquerda. Se por exemplo a equação é:
y3
b2 − z
c = 0
obtemos o chamado cilindro cúbico. ( a, c não são nulos). Desenho à direita.
Figura 2.18: Cilindro parabólico e cúbico, respectivamente.
Em geral, se na equação que descreve uma quádrica falta uma variável, elarepresenta um cilindro, com geratrizes paralelas à variável que falta.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 57/407
2.9. CILINDROS 57
Exemplos 2.1.
[1] Ache a natureza da quádrica 9 x2 − 18 x + 9 y2 + 4 z 2 + 16 z − 11 = 0.Completando os quadrados:
9 x2 − 18 x + 9 y2 + 4 z 2 + 16 z − 11 = (x − 1)2
4 +
y2
4 +
(z + 2)2
9 − 1;
a equação representa um elipsóide centrado no ponto (1, 0, −2).
[2] Determine a equação da esfera concêntrica à esfera
x2 + y2 + z 2 + 4x + 2y − 6z + 10 = 0
e que passa pelo ponto (−4, 2, 5).
Como as esferas são concêntricas, completamos os quadrados para determi-nar o centro da esfera dada:
x2 + y2 + z 2 + 4x + 2y − 6z + 10 = (x + 2)2 + (y + 1)2 + (z − 3)2 − 4;
então, o centro é (−2, −1, 3) e a equação é:
(x + 2)2 + (y + 1)2 + (z − 3)2 = a2.
Para determinar a usamos o fato de que o ponto (−4, 2, 5) pertence à esfera;logo a2 = 17. A equação é:
(x + 2)2 + (y + 1)2 + (z
−3)2 = 17.
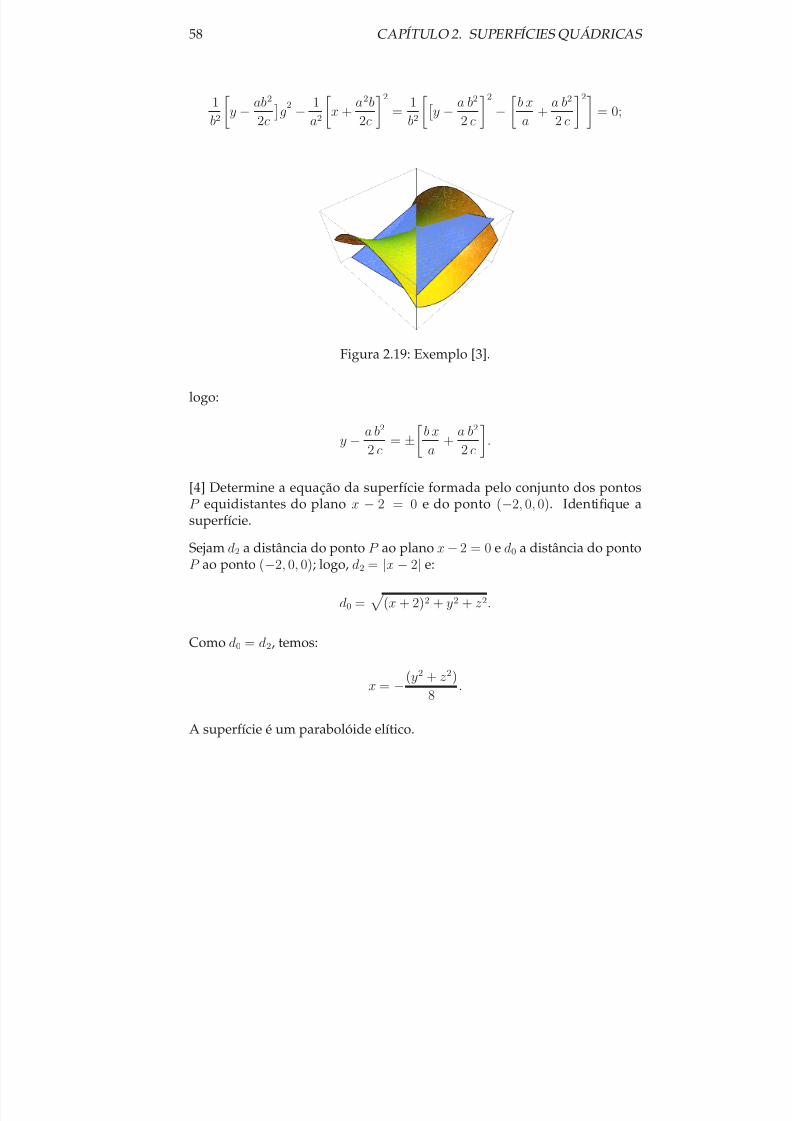
[3] Verifique que a interseção do parabolóide hiperbólico y2
b2 − x2
a2 =
z
c com
o planoz = b x + a y é formada por duas retas. Para determinar a interseção, deve-mos resolver o sistema de equações :
y2
b2 − x2
a2 = z
c
b x + a y = z.
Igualando as equações por z :
y2
b2 − a y
c
−
x2
a2 + b x
c
= 0; completando os
quadrados:
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 58/407
58 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
1
b2
y − ab2
2c
g2 − 1
a2
x +
a2b
2c
2=
1
b2
y − a b2
2 c
2−
b x
a +
a b2
2 c
2 = 0;
Figura 2.19: Exemplo [3].
logo:
y − a b2
2 c = ±
b x
a +
a b2
2 c
.
[4] Determine a equação da superfície formada pelo conjunto dos pontosP equidistantes do plano x − 2 = 0 e do ponto (−2, 0, 0). Identifique a
superfície.Sejam d2 a distância do ponto P ao plano x − 2 = 0 e d0 a distância do pontoP ao ponto (−2, 0, 0); logo, d2 = |x − 2| e:
d0 =
(x + 2)2 + y2 + z 2.
Como d0 = d2, temos:
x =−
(y2 + z 2)
8 .
A superfície é um parabolóide elítico.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 59/407
2.9. CILINDROS 59
Figura 2.20: Exemplo [4].
[5] Determine a equação da superfície formada pelo conjunto dos pontos P equidistantes das retas L1, que passa pela origem na direção (1, 0, 0) e, L2
que passa pelo ponto (0, 1, 0) na direção (0, 0, 1). Identifique a superfície.
Sejam d1(P, Li) as distâncias do ponto P às retas Li (i = 1, 2); como:
d1(P, L1) = d1(P, L2),
temos:
y = (x2 − z 2)
2 .
A superfície é um parabolóide hiperbólico.
Figura 2.21: Exemplo [5].
[6] Mostre que se o ponto P 0 = (x0, y0, z 0) pertence ao parabolóide hiper- bólico definido por z = y2 − x2, então, as retas L1 que passa pelo ponto

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 60/407
60 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
P 0 na direção (1, 1, 2 (y0 − x0)) e L2 que passa pelo ponto P 0 na direção(−1, −1, −2 (y0 − x0)) estão contidas no parabolóide hiperbólico.
Consideremos a reta L1. Temos:
x(t) = x0 + t
y(t) = y0 + t
z (t) = z 0 + 2 t (y0 − x0);
logo,
y(t)2 − x(t)2 = (y20 − x2
0) + 2 t (y0 − x0) = z 0 + 2 t (y0 − x0) = z (t).
Para L2 o procedimento é análogo.
Os objetos sólidos do R3 que utilizaremos neste texto são definidos atravésde inequações.
Exemplos 2.2.
[1] R = {(x,y,z ) ∈ R3/a ≤ x ≤ b, c ≤ y ≤ d, p ≤ z ≤ q } = [a, b]×[c, d]×[ p, q ].O conjunto R representa um paralelepípedo retangular.
[2] B = {(x,y,z ) ∈ R3/ x2 + y2 + z 2 ≤ r2, r > 0}. O conjunto B representauma bola sólida de centro na origem e raio r ou o conjunto de todos osvetores de norma menor ou igual a r.
[3] C = {(x,y,z ) ∈ R3/x2 + y2 ≤ r2, 0 ≤ z ≤ h, h > 0}. O conjunto C é umaporção do cilindro circular reto de altura h e raio r.
[4] F é o sólido obtido pela revolução de uma região do plano fechada elimitada por uma curva:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 61/407
2.9. CILINDROS 61
Figura 2.22: Sólido em R
3
.
Note que todos estes conjuntos possuem volume.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 62/407
62 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS
2.10 Exercícios
1. Determine a natureza das seguintes quádricas:
(a) 4x2 + 9y2 + z 2 = 36
(b) z −
4(x2 + y2) = 0
(c) 4x2 + 9y2 − z 2 = 36
(d) x2 − y2 + z 2 = 0
(e) x2
36 +
z 2
25 − 4y = 0
(f) x2
36 − z 2
25 − 9y = 0
(g) x2 + 16z 2 − 4y2 + 16 = 0
(h) x2 − 2x + y2 + z 2 = 0
(i) x2 + y2 = 2 y
(j) x2 + y2 = 4 x
2. Utilizando a técnica dos traços, esboce o gráfico de cada quádrica doexercício [1].
3. Determine a natureza da curva obtida pela projeção no plano xy dainterseção de :
(a) z + x2 = 1 e z − x2 − y2 = 0.
(b) x = 2 e x = y2 + z 2.
(c) z = 8 − 5x2 − 3y2 e z = 3x2 + 5y2.
4. Determine os valores de k tais que a interseção do plano x + k y = 0com a quádrica y2 − x2 − z 2 = 1 seja uma elipse e uma hipérbole,respectivamente.
5. Verifique que 2x−2z −y = 10 intersecta 2z = x2
9 +y2
4 num único pontoe determine o ponto.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 63/407
2.10. EXERCÍCIOS 63
6. Determine a, b, c e d de modo que os pontos dados pertençam à quá-drica:
a x2 + b y2 + c z 2 + d = 0,
onde:
(a) (1, 1, −1), (2, 1, 0), (5, −5, 3).
(b) (2, −1, 1), (−3, 0, 0), (1, −1, −2).
(c) (1, 2, −1), (0, 1, 0), (2, 1, −2).
7. Determine a equação da superfície definida pelo conjunto dos pontosP = (x,y,z ) tais que a distância de P ao eixo dos x é o dobro dadistância de P ao plano yz . Identifique a superfície.
8. Determine a equação da superfície definida pelo conjunto dos pontosP = (x,y,z ) tais que a distância de P ao eixo dos y é 34 da distância de
P ao plano xz . Identifique a superfície.
9. Determine a equação da superfície definida pelo conjunto dos pontosP = (x,y,z ) tais que a distância de P ao ponto (0, 0, 1) é igual à dis-tância de P ao plano y = −1. Identifique a superfície.
10. Verifique que o ponto P = (1, 3, −1) pertence ao parabolóide hiperbó-lico definido por 4 x2 − z 2 = y e determine as equações das duas retasque passam por P e estão contidas no parabolóide.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 64/407
64 CAPÍTULO 2. SUPERFÍCIES QUÁDRICAS

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 65/407
Capítulo 3
FUNÇÕES DE VÁRIASVARIÁVEIS
3.1 Introdução
Como no Cálculo de uma variável, neste capítulo estudaremos uma dasnoções centrais da Matemática, o conceito de função.
Uma função de várias variáveis reais é uma regra que descreve como umaquantidade é determinada por outras quantidades, de maneira única.
Através das funções de várias variáveis poderemos modelar uma grandequantidade de fenômenos dos mais diversos ramos da Ciência.
Definição 3.1. Seja A ⊂ Rn. Uma função f definida no subconjunto A comvalores em R é uma regra que associa a cada u ∈ A um único número real
f (u
).
Observação 3.1.
1. Os elementos de u ∈ A são chamados variáveis independentes dafunção e os elementos w = f (u) são chamados variáveis dependentesda função.
2. A notação que utilizaremos é:
f : A ⊂ Rn −→ R
u −→ f (u).
65

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 66/407
66 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
3. Se n = 3, denotamos a variável independente por u = (x,y,z ) e afunção por:
w = f (x,y,z ),
4. Se n = 2, denotamos a variável independente por u = (x, y) e a funçãopor:
z = f (x, y),
z é chamada variável dependente da função .
Exemplos 3.1.
[1] O número de indivíduos Q de uma certa colônia de fungos depende
essencialmente da quantidade N de nutrientes (gr), da quantidade H deágua (cm3), da temperatura T (0C ) e da presença de uma certa proteina L(ml). Experimentalmente foi obtida a seguinte tabela:
N H T L Q
10 1 10 0.1 1520 3.5 14 0.4 2030 5.6 16 0.8 2222 8 21 0.1 2125 5.1 12 0.8 1510 1.4 30 1.6 1250 7.3 35 0.9 17
Q possivelmente não tem uma formulação matemática explícita, mas é umafunção bem definida:
Q = Q(N ,H,T ,L).
[2] O volume V de um cilindro é função do raio r de sua base e de sua alturah:
V (r, h) = π r2 h.
Logo, um cilindro de altura h = 10 cm e raio r = 2 cm tem volume:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 67/407
3.1. INTRODUÇÃO 67
V (2, 10) = π 22 × 10 = 40 π cm3,
aproximadamente, 125.663 cm3
[3] Um tanque para estocagem de oxigênio líquido num hospital deve tera forma de um cilindro circular reto de raio r e de altura l m (m =metros),
com um hemisfério em cada extremidade. O volume do tanque é descritoem função da altura l e do raio r.
r
l
Figura 3.1: O tanque do exemplo [3].
O volume do cilindro é π l r2
m3
e o dos dois hemisférios é 4 π r3
3 m3
; logo, ovolume total é:
V (l, r) = π
4 r3
3 + l r2
m3.
Por exemplo, se a altura for 8 m e o raio r = 1 m, o volume é:
V (8, 1) = 28 π
3 m3.
[4] O índice de massa corporal humano (IMC) é expresso por:
IMC (P, A) = P
A2,
onde P é o peso em quilos e A a altura em m. O IMC indica se uma pes-soa está acima ou abaixo do peso ideal, segundo a seguinte tabela da OMS(Organização Mundial da Saude):
Condição IMC
Abaixo do peso < 18.5
Peso normal 18.5
≤IMC
≤25
Acima do peso 25 ≤ IMC ≤ 30Obeso > 30

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 68/407
68 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Por exemplo, uma pessoa que mede 1.65 m e pesa 98 quilos, tem:
IMC (98, 1.65) = 35.9;
logo segundo a tabela está obeso. Agora uma pessoa que mede 1.80 m epesa 75 kg, tem
IMC (98, 1.75) = 23.1;
logo, segundo a tabela tem peso normal.
[5] Da lei gravitacional universal de Newton segue que dada uma partículade massa m0 na origem de um sistema de coordenadas x y z , o módulo daforça F exercida sobre outra partícula de massa m situada no ponto (x,y,z )é dado por uma função de 5 variáveis independentes:
Figura 3.2: Exemplo [5].
F (m0,m,x,y,z ) = g m0 m
x2 + y2 + z 2,
onde g é a constante de gravitação universal.
[6] (Lei de Gay - Lussac) A lei de um gás ideal confinado é dada por:
P V = k T,
onde P é a pressão em N/u3 (N =Newton, u=unidades de medida), V é ovolume em u3, T é a temperatura em graus e k > 0 uma constante quedepende do gás.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 69/407
3.1. INTRODUÇÃO 69
Podemos expressar o volume do gás em função da pressão e da tempera-tura; a pressão do gás em função do volume e da temperatura ou a tempe-ratura do gás em função da pressão e do volume:
V (P, T ) = k T
P ,
P (V, T ) = k T
V e
T (P, V ) = P V
k .
[7] Quando um poluente é emitido por uma chaminé de h metros de altura,a concentração do poluente, a x quilômetros da origem da emissão e a ymetros do chão pode ser aproximada por:
P (x, y) = a
x2 eh(x,y) + ek(x,y)
,
onde h(x, y) = − b
x2
y − h2 e k(x, y) = − b
x2
y + h2.
O poluente P é medido em µg/m (µg=microgramas), onde a e b são cons-tantes que dependem das condições atmosféricas e da taxa de emissão dopoluente. Sejam a = 200 e b = −0.002. Por exemplo, para uma chaminé de10 m, a contaminação a 1 km de distância e a uma altura de 2 m é:
P (1000, 2) = 0.004 µg/m.
[8] Lei do fluxo laminar de Poiseuille: Fluxo sanguíneo através de um vaso,como artérias ou veias. Como as quantidades envolvidas são pequenas,podemos considerar que vasos tem formato cilíndrico não elástico.
R
Figura 3.3: Fluxo laminar de Poiseuille.
Denotemos por R o raio e l o comprimento, medidos em cm. Devido africção nas paredes do vaso, a velocidade v do sangue é maior ao longo do

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 70/407
70 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
eixo central do vaso e decresce se a distância d (cm) do eixo à parede crescee é zero na parede. v é uma função de quatro variáveis:
v(P,R,l,d) = P (R2 − d2)
4 l η ,
onde η é a viscocidade do sangue e P a diferença entre a pressão da entrada
e a da saída do sangue no vaso, medida em dina/cm2. Experimentalmente,para o sangue humano numa veia: η = 0.0027. Por exemplo, se l = 1.675,R = 0.0075, P = 4 × 103 e d = 0.004, tem-se:
v(4 × 103, 1.675, 0.004)) = 8.89994 cm/seg.
[9] Médicos dos desportos desenvolveram empiricamente a seguinte fór-mula para calcular a área da superfície de uma pessoa em função de seupeso e sua altura:
S (P, A) = 0.0072 P 0.425 A0.725,
onde P é o peso em quilogramas, A é a altura em cm e S é medido emm2. Uma pessoa que pesa 50 quilos e mede 160 cm deve ter uma área dasuperfície corporal: S (50, 160) = 1.5044 m2.
[10] Um circuito elétrico simples é constituído de 4 resistores como na figura:
R R R
R
E
1 2 3
4
Figura 3.4: Circuito elétrico.
A intensidade da corrente I neste circuito é função das resistências Ri, onde(i = 1, 2, 3, 4) e da tensão da fonte E ; logo:
I (R1, R2, R3, R4, E ) = E
R1 + R
2 + R
3 + R
4
.
[11] A produção P ( valor monetário dos bens produzido no ano) de umafábrica é determinada pela quantidade de trabalho (expressa em operários

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 71/407
3.2. DOMÍNIO E IMAGEM 71
por horas trabalhadas no ano) e pelo capital investido (dinheiro, comprade maquinarias, matéria prima, etc.). A função que modela a produção échamada de Cobb-Douglas e é dada por:
P (L, K ) = A K α L1−α,
onde L
é a quantidade de trabalho, K
é o capital investido, A
e α
são cons-tantes positivas (0 < α < 1).
A função de produção de Cobb-Douglas tem a seguinte propriedade paratodo n ∈ N:
P (n L , n K ) = A n K α L1−α,
isto é, para acréscimos iguais na quantidade de trabalho e de capital inves-tido obtemos o mesmo acréscimo na produção.
Por exemplo, se o capital investido é de R$600.000 e são empregados 1000
operários/hora, a produção é dada pela seguinte função de Cobb-Douglas:P (L, K ) = 1.01 L
34 K
14 ;
então, P (1000, 600.000) = 4998.72.
3.2 Domínio e Imagem
De forma análoga ao Cálculo de uma variável, os conjuntos Domínio e Ima-gem de uma função são relevantes para o estudo das funções de várias va-
riáveis.Definição 3.2. Seja f : A ⊂ Rn −→ R uma função.
1. O conjunto de todas as variáveis independentes u ∈ Rn tais que f (u)existe é chamado domínio de f e é denotado por Dom(f ).
2. O conjunto dos z ∈ R tais que f (u) = z e u ∈ Dom(f ) é chamadoimagem de f e é denotado por Im(f ).
Observação 3.2. Na prática o domínio de uma função é determinado pelocontexto do problema.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 72/407
72 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Exemplos 3.2.
[1] O volume V de um cilindro é função do raio r de sua base e de sua alturah. Logo,
V (r, h) = π r2 h.
Como o raio e a altura de um cilindro devem ser positivos, temos que:
Dom(f ) = {(r, h) ∈ R2 / r > 0, h > 0} = (0, +∞) × (0, +∞) eIm(f ) = (0, +∞).
No caso de não estar considerando a função como volume, teríamos que:
Dom(f ) = I m(f ) = R2.
[2] Seja z = f (x, y) =
1 − x2
− y2
.Note que f é definida se, e somente se:
1 − x2 − y2 ≥ 0,
ou seja x2 + y2 ≤ 1; logo:
Dom(f ) = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
Por outro lado 0 ≤ z =
1 − x2 − y2 ≤ 1; logo, Im(f ) = [0, 1].
1
1
Figura 3.5: Exemplo [2].
[3] Seja z = f (x, y) = x
x − y.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 73/407
3.2. DOMÍNIO E IMAGEM 73
Note que f é definida se o denominador x − y = 0; então, x = y e,
Dom(f ) = {(x, y) ∈ R2/x = y} = R2 − {(x, x)/x ∈ R}.
1
1
Figura 3.6: Exemplo [3].
[4] Seja z = f (x, y) = arcsen(x + y).
Note que arcsen(u) é definido se −1 ≤ u ≤ 1; logo, −1 ≤ x + y ≤ 1 o queacontece, se, e somente se, y ≤ 1 − x e −1 − x ≤ y; então:
Dom(f ) = {(x, y) ∈ R2/ − 1 − x ≤ y ≤ 1 − x}.
1
1
Figura 3.7: Exemplo [4].
[5] Seja z = f (x, y) = ln(y − x).
Note que a função logarítmica ln(u) é definida se u > 0; logo, y − x > 0 e f
é definida em todo o semi-plano definido por:
{(x, y) ∈ R2/y > x}.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 74/407
74 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
1
1
Figura 3.8: Exemplo [5].
[6] Seja z = f (x, y) = y x2 + y2 − 1
.
Note que o quociente é definido se x2 + y2 − 1 > 0; logo, a função é definidaem todo o plano menos a região determinada por x2 + y2 ≤ 1.
1
1
Figura 3.9: Exemplo [6].
[7] Seja w = f (x,y,z ) = y
x2 + y2 + z 2 − 1.
Note que a raiz quadrada está definida se, e somente se:
x2 + y2 + z 2 − 1 ≥ 0;
logo, a função é definida em todo R3 menos a região determinada por:
x2 + y2 + z 2 < 1.
De outro modo, todo o espaço menos os vetores de R3 de norma menor que1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 75/407
3.3. GRÁFICO DE FUNÇÕES DE VÁRIAS VARIÁVEIS 75
Observação 3.3. Da mesma forma que no caso de uma variável, as funçõespolinomiais de grau n , de várias variáveis tem Dom(f ) = Rn e a Im(f )depende do grau do polinômio.
[8] Se f (x,y,z ) = x5 + y3 − 3 x y z 2 − x2 + x2 y z + z 5 − 1, então, Im(f ) = R.
Se g(x, y) = x2
+ y2
− 2 x y, então Im(f ) = [0, +∞).
3.3 Gráfico de Funções de Várias Variáveis
Definição 3.3. Seja f : A ⊂ Rn −→ R uma função. O gráfico de f é oseguinte subconjunto de Rn+1:
G(f ) = {(x, f (x)) ∈ Rn+1/x ∈ Dom(f )} ⊂ Rn × R
Observações 3.1.
1. Se n = 2 e x = (x, y); então:
G(f ) = {(x,y,f (x, y))/(x, y) ∈ Dom(f )}.
G(f ) é, em geral, uma superfície em R3.
2. Por exemplo, o gráfico da função :
f (x, y) =
1 se x, y ∈ Q
0 se x, y /∈ Q,
não é uma superfície.
3. Se n = 3, x = (x,y,z ) e G(f ) é uma "hipersuperfície"em R4.
4. Para n = 2, a projeção do gráfico de f sobre o plano xy é exatamenteDom(f ).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 76/407
76 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Figura 3.10: Esboço do gráfico de uma função , ponto a ponto.
Figura 3.11: Gráfico de uma função.
3.4 Conjuntos de nívelDefinição 3.4. O conjunto de nível de f com valor c ∈ R é definido por:
{x ∈ Dom(f )/f (x) = c}
Em particular:
1. Se n = 2, o conjunto de nível c é dito curva de nível c de f :
C c = {(x, y) ∈ Dom(f )/f (x, y) = c}

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 77/407
3.4. CONJUNTOS DE NÍVEL 77
2. As curvas de nível são obtidas pelas projeções no plano xy, das curvasobtidas pela interseção do plano z = c com a superfície G(f ).
-2 -1 0 1 2
-2
-1
0
1
2
Figura 3.12: Curvas de nível e gráficos, respectivamente.
3. Se n = 3, o conjunto de nível c é dito superfície de nível c de f :
S c = {(x,y,z ) ∈ Dom(f )/f (x,y,z ) = c}
4. No caso n = 3, G(f ) ⊂ R4; portanto, somente poderemos exibir esbo-ços de suas seções.
5. Se z = T (x, y) é a temperatura em cada ponto de uma região do plano,as curvas de nível correspondem a pontos de igual temperatura. Neste
caso, as curvas são chamadas isotermas.
0.0 0.5 1.0 1.5 2.0 2.5 3.0
1.0
0.5
0.0
0.5
1.0
1.5
2.0
Figura 3.13: Curvas Isotermais.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 78/407
78 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
6. Se z = P (x, y) é o potencial elétrico em cada ponto (x, y) de uma regiãodo plano, as curvas de nível correspondem a pontos de igual potencialelétrico. Neste caso, as curvas são chamadas equipotenciais.
-4 -2 0 2 4
-4
-2
0
2
4
x
y
Figura 3.14: Curvas Equipotenciais.
Outra aplicação importante das curvas de nível é o esboço de gráficos defunção de duas variáveis:
A construção do esboço do G(f )
O esboço do grá fico de uma função é feita assim:
1. Uma vez dado o valor da "altura"z = c obtemos uma curva plana.
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 3.15:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 79/407
3.4. CONJUNTOS DE NÍVEL 79
2. Elevando cada curva, sem esticá-la ou incliná-la obtemos o contornoaparente de G(f ).
Figura 3.16:
3. Auxiliado pelas seções (como no caso das quádricas), podemos esbo-çar G(f ) de forma bastante fiel.
Figura 3.17:
4. Note que curvas de nível muito espaçadas, significa que o gráficocresce lentamente; duas curvas de nível muito próximas significa queo gráfico cresce abruptamente.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 80/407
80 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Figura 3.18:
Exemplos 3.1.
[1] Se T (x, y) = x + y2 − 1 representa a temperatura em cada ponto de umaregião do plano, as curvas de nível ou isotermas são T (x, y) = c, isto é:
x + y
2
− 1 = c, c ∈ R.
Temos uma família de parábolas:
c x + y2 − 1 = c
0 x + y2 = 11 x + y2 = 2
-1 x + y2 = 0
2 x + y2 = 3-2 x + y2 = −1

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 81/407
3.4. CONJUNTOS DE NÍVEL 81
0.0 0.5 1.0 1.5 2.0 2.5 3.0
2
1
0
1
2
Figura 3.19: Esboco das curvas de nível de T = T (x, y).
[2] Esboce o gráfico de z = f (x, y) = x2 − y2.
Note que Dom(f ) = R2.
Interseções de G(f ) com os eixos coordenados: somente a origem.
Simetrias: a equação:z = x2 − y2
não se altera se substituimos x e y por −x e −y; logo, tem simetria em relaçãoaos planos yz e xz .
Curvas de nível:
Fazendo z = c, temos: x2 − y2 = c.
Se c < 0, temos x2 − y2 = c, que são hipérboles que intersectam o eixo dos y.
Se c = 0, temos y = ±x, que são duas retas passando pela origem.
Se c > 0, temos x2
− y2
= c, que são hipérboles que intersectam o eixo dos x.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 3.20: Curvas de nível.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 82/407
82 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Traços:
No plano xy: um par de retas que se intersectam na origem.
No plano yz : a parábola: y2 + z = 0.
No plano xz : a parábola: x2
−z = 0.
Logo z = f (x, y) = x2 − y2 é um parabolóide hiperbólico.
Figura 3.21: Gráfico.
[3] Esboce o gráfico de z = f (x, y) = x + y2.
Note que Dom(f ) = R2.
Interseções de G(f ) com os eixos coordenados: somente a origem.
Simetrias: a equação:
z = x + y2
não se altera se substituimos y por −y; logo, tem simetria em relação aoplano xz .
Curvas de nível:
Fazendo z = c, temos y2 = c − x, que é uma família de parábolas com focono eixo dos y, para todo c ∈ R.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 83/407
3.4. CONJUNTOS DE NÍVEL 83
-2 -1 0 1 2
-2
-1
0
1
2
Figura 3.22: Curvas de nível.
Traços:
No plano yz é a parábola: y2 − z = 0. No plano xz é a reta: x − z = 0.
Logo z = f (x, y) = x + y2 é um cilindro parabólico.
Figura 3.23: Gráfico.
[4] Esboce o gráfico de z = f (x, y) = ln(x2 + y2).
Note que Dom(f ) = R2 − {(0, 0)}.
Interseções com os eixos coordenados: (0, ±1, 0), (±1, 0, 0).
Simetrias: a equação:
z = ln(x2 + y2)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 84/407
84 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
não se altera se substituimos x e y por −x e −y; logo, tem simetria em relaçãoaos planos yz e xz .
Curvas de nível.
Fazendo z = c, temos:
x2 + y2 = ec,
para todo c ∈ R. As curvas de nível são círculos centrados na origem deraios ec/2; se c → −∞, o raio tende para zero e se c → +∞, o raio cresce.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 3.24: Curvas de nível.
A superfície tem o aspecto de um funil.
Figura 3.25: Gráfico.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 85/407
3.4. CONJUNTOS DE NÍVEL 85
[5] Esboce o gráfico de z = f (x, y) = sen(x).
Note que Dom(f ) = R2.
Como na equação falta a variável y, o gráfico de f é um cilindro de diretriz
z = sen(x) no plano xz e geratriz paralela ao eixo dos y.
Figura 3.26: Gráfico.
[6] Esboce as superfícies de nível do gráfico de w = f (x,y,z ) = x − y + z + 2.
Note que Dom(f ) = R3
.
Superfícies de nível:
Fazendo w = c, temos:
x − y + z = c − 2,
que representa uma família de planos paralelos de normal (1, −1, 1), paraqualquer c.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 86/407
86 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Figura 3.27: Superfícies de nível.
[7] Esboce as superfícies de nível do gráfico de w = f (x,y,z ) = z − x2 − y2.
Note que Dom(f ) = R3.
Superfícies de nível:
Fazendo w = c, temos:
z = x2 + y2 + c,
que para cada c é a equação de um parabolóide circular com eixo no eixodos z .
Figura 3.28: Superfícies de nível.
[8] Esboce as superfícies de nível do gráfico de w = f (x,y,z ) = x2 − y2 + z 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 87/407
3.4. CONJUNTOS DE NÍVEL 87
Superfícies de nível:
Fazendo w = c temos:
x2 − y2 + z 2 = c.
Se c < 0, é um hiperbolóide de duas folhas: x2
−y2 + z 2 = c.
Figura 3.29: Hiperbolóide de duas folhas.
Se c = 0, é um cone circular: x2 − y2 + z 2 = 0.
Figura 3.30: Cone circular.
Se c > 0, é um hiperbolóide de uma folha: x2 − y2 + z 2 = c; etc.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 88/407
88 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
Figura 3.31: Hiperbolóide de uma folha.
Em alguns casos é mais conveniente esboçar as curvas nível do que o gráficoda função.
[9] Considere a função de Cobb-Douglas:
P (L, K ) = 1.01 L34 K
14 .
As curvas de nível de P para diversas produções são esboçadas, indicandoas possibilidades de L e K para cada produção.
0.0 0.5 1.0 1.5 2.0
0.0
0.5
1.0
1.5
2.0
Figura 3.32: Curvas de nível da função de Cobb-Douglas.
[10] Sabemos que o índice de massa corporal é dado por:
IMC (P, A) = P A2
.
As curvas de nível de ICM indicam as possibilidades de:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 89/407
3.4. CONJUNTOS DE NÍVEL 89
10 ≤ P ≤ 200 e 0.5 ≤ A ≤ 2.5.
50 100 150 200
0.5
1.0
1.5
2.0
2.5
Figura 3.33: Curvas de nível da função da massa corporal.
De forma análoga ao caso de uma variável, nem toda superfície em R3 é o
gráfico de uma função de duas variáveis. A condição necessária e suficientepara que uma superfície em R3 seja o gráfico de uma função z = f (x, y)é que toda reta paralela ao eixo dos z intersecte a superfície em um únicoponto. A esfera x2 + y2 + z 2 = 1 não pode ser gráfico de uma função de duasvariáveis, mas os hemisférios da esfera são gráficos das funções:
z = f 1(x, y) =
1 − x2 − y2 e z = f 2(x, y) = −
1 − x2 − y2.
Em geral, toda equação de tres variáveis que represente uma superfície éuma superfície de nível de alguma função de tres variáveis. As superfíciesquádricas são superfícies de algum nível de funções de três variáveis.
Exemplos 3.2.
[1] Seja x2 + y2 + z 2 = 1; então: x2 + y2 + z 2 = 1 é superfície de nível c = 0para
f (x,y,z ) = x2 + y2 + z 2 − 1,
x2 + y2 + z 2 = 1 é superfície de nível c = 1 para
g(x,y,z ) = x2 + y2 + z 2
e x2+y2+z 2 = 1 é superfície de nível c = 30 para h(x,y,z ) = x2+y2+z 2+29.
[2] Seja z = f (x, y), considere h(x,y,z ) = z − f (x, y); então, G(f ) é umasuperfície de nivel zero de h.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 90/407
90 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
3.5 Exercícios
1. Determine o volume em função de h e r.
(a) Um depósito de grãos tem formato de um cilindro circular reto dealtura h e raio r, com teto cônico.
(b) Um depósito de gás tem formato de um cilindro circular reto dealtura h e raio r, com teto uma semi-esfera.
2. Se f (x, y) = x5 −y5−4 x2 y3−3 x3 y2 + x y2 + x2 −y2−x + y + 1, calcule:
(a) f (0, 0)
(b) f (1, 1)
(c) f (x, x)
(d) f (y, −y)
(e) f (x2, √ x y)(f) f (1, h)
(g) f (h, 0)
(h) f (x + h, y) − f (x, y)
h
(i) f (x, y + h) − f (x, y)
h
3. Se f (x,y,z ) = (x y z )2, calcule:
(a) f (0, 0, 0)
(b) f (1, 1, π)
(c) f (x,x,x)
(d) f (y,z,z )
(e) f (x2,√
x y z , z 3 y)
(f) f (x + h, y,z ) − f (x,y,z )
h
(g)
f (x, y + h, z )
−f (x,y,z )
h
(h) f (x,y,z + h) − f (x,y,z )
h

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 91/407
3.5. EXERCÍCIOS 91
(i) f (x + h, y + h, z + h) − f (x,y,z )
h
4. Determine Dom(f ) se:
(a) f (x, y) =
x − yx + y
(b) f (x, y) = x2 − y2
x − y
(c) f (x, y) = x + y
x y
(d) f (x, y) = 16 − x2 − y2
(e) f (x, y) = |x|e y
x
(f) f (x, y) = |x| − |y|(g) f (x, y) = x − y
sen(x) − sen(y)
(h) f (x, y) =√
y − x +√
1 − y
(i) f (x,y,z ) = x y z − x4 + x5 − z 7
(j) f (x,y,z ) = sen(x2 − y2 + z 2)
(k) f (x,y,x) = y
z x
(l) f (x,y,z ) = x2 sec(y) + z
(m) f (x,y,z ) = ln(x2 + y2 + z 2
−1)
(n) f (x,y,z ) =
1 − x2 − y2 − z 2
(o) f (x,y,z ) = ex2+y2+z2
(p) f (x,y,z ) = 3
1 − x2 − y2 − z 2.
5. Esboce Dom(f ) no plano de cada função do exercício [4].
6. Seja x ∈ Rn. Uma função f (x) é dita homogênea de grau n ∈ Z separa todo t > 0, f (tx) = tn f (x). Verifique que as seguintes funçõessão homogêneas e determine o grau:
(a) f (x, y) = 3 x2 + 5 x y + y2

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 92/407
92 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
(b) f (x, y) = 2
x2 + y2
(c) f (x, y) =
x2 + y2 sen(y
x), x = 0
(d) f (x,y,z ) = x
y3 +
y
z 3 +
z
x3
(e) f (x,y,z ) =
1
x + y + z
(f) f (x,y,z ) = x2 e−y
z
7. Esboce as curvas de nível de f , para os seguintes c:
(a) f (x, y) =
100 − x2 − y2, c = 0, 8, 10.
(b) f (x, y) =
x2 + y2, c = 0, 1, 2, 3, 4
(c) f (x, y) = 4 x2 + 9 y2, c = 0, 2, 4, 6
(d) f (x, y) = 3x − 7y, c = 0, ±1, ±2(e) f (x, y) = x2 + xy, c = 0, ±1, ±2, ±3
(f) f (x, y) = x2
y2 + 1, c = 0, ±1, ±2, ±3
(g) f (x, y) = (x − y)2, c = 0, ±1, ±2, ±3
(h) f (x, y) = ln(x2 + y2 − 1), c = 0, ±1
(i) f (x, y) = x
x2 + y2 + 1, c = ±1, ±2
(j) f (x, y) = ex2+y2 , c = 1, 2
8. Esboce as superfícies de nível de f , para os seguintes c:
(a) f (x,y,z ) = −x2 − y2 − z 2, c = 0, ±1, ±2
(b) f (x,y,z ) = 4x2 + y2 + 9z 2, c = 0, ±12 , ±1
(c) f (x,y,z ) = x2 + y2 + z , c = 0, ±1, ±2
(d) f (x,y,z ) = x − y2 + z 2, c = 0, ±1, ±2
(e) f (x,y,z ) = x y z , c = 0, ±1, ±2
(f) f (x,y,z ) = e−(x2+y2+z2), c = 0, ±1, ±2
9. Esboce o gráfico das seguintes funções, utilizando as curvas de nívelde f :

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 93/407
3.5. EXERCÍCIOS 93
(a) f (x, y) = x − y − 2
(b) f (x, y) = x2 + 4 y2
(c) f (x, y) = x y
(d) f (x, y) = 2 x2 − 3 y2
(e) f (x, y) = |y|(f) f (x, y) =
16 − x2 − y2
(g) f (x, y) =
9 x2 + 4 y2
(h) f (x, y) = e−(x2+y2)
(i) f (x, y) = 1 −
x2 + y2
(j) z = 1 + y2 − x2
(k) z = x2
(l) z =
1 + x2 + y2
(m) z = y3
(n) z = sen(x)
(o) z = ey
10. Função de DuBois-DuBois: Em Medicina, às vezes, se utiliza a se-guinte função para determinar a superfície corporal de uma pessoa:
S (P, h) = 0.0072 P 0.425 h0.725,
que estabelece uma relação entre a área da superfície S (m2) de umapessoa, o seu peso P (Kg) e sua altura h (cm).
(a) Se uma criança pesa 15 kg e mede 87 cm, qual é sua superfíciecorporal?
(b) Esboce as curvas de nível da função S .
(c) Esboce o gráfico de S .
11. De forma análoga ao que ocorre no Cálculo de uma variável, dadas f
e g funções definidas em A ⊂ Rn, definimos:
f + g
(u) = f (u) + g(u).
f g
(u) = f (u) g(u);
em particular,
λ f
(u) = λ f (u), para todo λ ∈ R.
f
g
(u) =
f (u)
g(u) ,
se g(u) = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 94/407
94 CAPÍTULO 3. FUNÇÕES DE VÁRIAS VARIÁVEIS
(a) Calcule: f + g, f g, e f
g, se:
i. f (x, y) = x3−x y2−x2 y−y3+x2+y2 e g(x, y) = x2 y+x y2−x3.
ii. f (x, y) = x y2 − x4 y3 e g(x, y) =
x2 + y2 + x y
(b) Calcule: f + g, f g, e f g , se
i. f (x,y,z ) = x y z − x2 z 2 e g(x,y,z ) = x y z − y2 z 2.
ii. f (x,y,z ) =
x y + z − x2 − y2 e g(x,y,z ) = x5 − y2 z 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 95/407
Capítulo 4
CONJUNTOS ABERTOS,FECHADOS E FRONTEIRA
4.1 Introdução
Lembremos que nos conceitos estudados no Cálculo de uma variável, osintervalos, fechados, abertos, tem um papel fundamental nas definições eteoremas.
A continuação apresentaremos alguns conceitos sobre certos tipos de con- juntos em várias variáveis, que tem um papel análogo aos intervalos emuma variável.
4.2 Bolas Abertas
Definição 4.1. Sejam r > 0 e x0 ∈ Rn. A bola aberta de centro x0 e raio r édenotada por B(x0, r) e definida por:
B(x0, r) = {x ∈ Rn/x− x0 < r}.
Observações 4.1.
1. Se n = 2; x0 = (x0, y0) e x = (x, y); logo:
x− x0 =
(x − x0)2 + (y − y0)2
e:
95

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 96/407
96 CAPÍTULO 4. CONJUNTOS ABERTOS, FECHADOS E FRONTEIRA
B(x0, r) = {(x, y) ∈ R2/(x − x0)2 + (y − y0)2 < r2}2. O conjunto B(x0, r) é o "interior"de um círculo centrado em (x0, y0) e
raio r , ou equivalentemente, o conjunto dos vetores no plano de ori-gem em (x0, y0) e norma menor que r. Neste caso, o conjunto B(x0, r)é chamado disco aberto de centro (x0, y0) e raio r.
B(x,r)
x0
0y r
(x ,y )00
Figura 4.1: Disco aberto.
3. Analogamente, se n = 3; x0 = (x0, y0, z 0) e x = (x,y,z ):
B(x0, r) = {(x,y,z ) ∈ R3/(x − x0)2 + (y − y0)2 + (z − z 0)2 < r2}
4. O conjunto B(x0, r) é o "interior"de uma esfera "sólida"centrada em(x0, y0, z 0) e raio r, ou equivalentemente, o conjunto dos vetores noespaço de origem em (x0, y0, z 0) e norma menor que r.
B(x,r)
r
x
Figura 4.2: Bola aberta.
5. Observe que em ambos os casos a desigualdade é estrita.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 97/407
4.3. CONJUNTOS ABERTOS 97
4.3 Conjuntos Abertos
Definição 4.2. A ⊂ Rn é dito aberto em Rn se para todo x ∈ A, existe B(x, r)tal que B(x, r) ⊂ A.
A
Figura 4.3: Conjunto aberto.
Estes conjuntos são a generalização natural de intervalos abertos em R. Por
definição, o conjunto vazio e Rn são conjuntos abertos em Rn.
Exemplos 4.1.
[1] Pela definição, {x} não é aberto em Rn, pois toda bola ou disco aberto decentro x não está contido em {x}.Em geral, os conjuntos do tipo {x1, x2, x3, ....., xn / xi ∈ Rn} não são abertos.
[2] R "pensado"como a reta {(x, 0) / x ∈ R} ⊂ R2 não é aberto no plano, poisqualquer disco aberto centrado em (x, 0) não está contido em R.
x
Figura 4.4: Exemplo [2].
[3] A = (a, b)
×(c, d)
é aberto emR2
.De fato, para todo (x, y) ∈ A, a < x < b e c < y < d, denote por ε omenor número do conjunto {|x − a|, |x − b|, |y − c|, |y − d|}, onde | | é a

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 98/407
98 CAPÍTULO 4. CONJUNTOS ABERTOS, FECHADOS E FRONTEIRA
distância entre números reais. Então, por exemplo, considerando r = ε
6,
temos, B((x, y), r) ⊂ A. Logo A é um conjunto aberto.
A
c
d
a b
Figura 4.5: Exemplo [3].
[4] A = R2 ⊂ R3 não é aberto no espaço, pois qualquer bola aberta centradaem (x,y, 0) não está contida em R2.
[5] B(x0, r) é um conjunto aberto. De fato, denotando por d(x,y) a distânciaentre os pontos x, y em Rn, se x ∈ B(x0, r) então d(x,x0) < r; tomandor1 = r − d(x,x0) < r, temos: B(x, r1) ⊂ B(x0, r).
Será útil dar um nome especial para um conjunto aberto que contenha umponto dado x. A tal conjunto chamaremos de vizinhança do ponto x.
4.4 Conjunto Fronteira
Definição 4.3. Seja A ⊂ Rn
. Um ponto x
∈ Rn
é dito ponto da fronteira oudo bordo de A se toda vizinhança de x intersecta A e Rn − A.
A
x
Figura 4.6: Bordo de A.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 99/407
4.4. CONJUNTO FRONTEIRA 99
Denotamos o conjunto dos pontos da fronteira do conjunto A por ∂A. Umconjunto é aberto se A ∩ ∂A = φ.
Exemplos 4.2.
[1] Se A = B(x, r) então ∂A = {y/d(x,y) = r
}; logo o conjunto C =
{y/d(x,y) ≤ r} não é aberto.
A C
Figura 4.7: Exemplo [2].
[2] Seja A = {(x, y) ∈ R2/x > 0}; este conjunto corresponde ao primeiro e aoquarto quadrantes sem incluir a reta x = 0 e é aberto no plano; de fato, seja(x, y) ∈ A e escolhamos r = x > 0; se (x1, y1) ∈ B((x, y), r) temos:
|x − x1| =
(x − x1)2 ≤
(x − x1)2 + (y − y1)2 < r = x.
Logo x1 > 0 e B((x, y), r) ⊂ A; note que ∂A = {(0, y)/y ∈ R}.
Figura 4.8: Exemplo [2].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 100/407
100 CAPÍTULO 4. CONJUNTOS ABERTOS, FECHADOS E FRONTEIRA
4.5 Conjuntos Fechados
Definição 4.4. Um conjunto A ⊂ Rn é dito fechado em Rn se ∂A ⊂ A.
Exemplos 4.3.
[1] Rn é também um conjunto fechado.[2] A = {(x, y) ∈ R2/ x2 + y2 < r2, r > 0} não é fechado, pois sua fronteira é:
∂A = {(x, y) ∈ R2/x2 + y2 = r2, r > 0}.
Logo ∂A ⊂ A.
[3] O sólido W = {(x,y,z ) ∈ R3/ x2 + y2 + z 2 ≤ r2, r > 0} é fechado pois suafronteira é:
∂W = {(x,y,z ) ∈ R3
/x2
+ y2
+ z 2
= r2
, r > 0}.Logo ∂W ⊂ W . Em geral, todos os sólidos são fechados.
[4] A = [a, b] × [c, d] é um conjunto fechado, pois ∂A é o retângulo formadopelas retas x = a, x = b, y = c e y = d.
Nos próximos parágrafos apresenteremos uma caracterização mais eficientedos conjuntos abertos e fechados.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 101/407
Capítulo 5
LIMITES E CONTINUIDADE
5.1 Limites
Seja f : A ⊂ Rn −→ R uma função e x0 ∈ A ∪ ∂A.
Observação 5.1. Intuitivamente, x0 ∈ A∪∂A significa que se x0 não pertencea A deve estar arbitrariamente "próximo"de A.
Definição 5.1. O limite de f quando x aproxima-se de x0 é L quando paratodo ε > 0, existe δ > 0 tal que x ∈ B(x0, δ ) ∩ A implica |f (x) − L| < ε.
Notação:
limx
→x0
f (x) = L
Equivalentemente, limx→x0
f (x) = L quando para todo ε > 0, existe δ > 0 talque:
0 < x− x0 < δ, implica em |f (x) − L| < ε.
Observações 5.1.
1. Se n = 2: Consideramos x = (x, y), x0 = (x0, y0) e o vetor x − x0 =(x − x0, y − y0) a norma do vetor x − x0 é:
x− x0 =
(x − x0)2 + (y − y0)2.
Usamos a seguinte notação:
101

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 102/407
102 CAPÍTULO 5. LIMITES E CONTINUIDADE
lim(x,y)→(x0,y0)
f (x, y) = L
2. Se n = 3: Consideramos x = (x,y,z ), x0 = (x0, y0, z 0) a norma do vetorx− x0 é:
x− x0 =
(x − x0)2 + (y − y0)2 + (z − z 0)2.
Usamos a seguinte notação:
lim(x,y,z)→(x0,y0,z0)
f (x,y,z ) = L
Exemplos 5.1.
Verifique que lim(x,y)→(1,2)
(x + 2 y) = 5. De fato:
|x + 2 y − 5| = |x − 1 + 2 (y − 2)| ≤ |x − 1| + 2 |y − 2|≤
(x − 1)2 + (y − 2)2 + 2
(x − 1)2 + (y − 2)2
≤ 3 (x, y) − (1, 2).
Dado ε > 0, seja δ = ε
3; (x, y) − (1, 2) < δ implica em |x + 2 y − 5| < 3 δ = ε.
Logo:
lim(x,y)→(1,2)
(x + 2 y) = 5.
As propriedades dos limites são análogas às dos limites de funções de umavariável e suas provas seguem diretamente da definição.
Teorema 5.1. Seja f : A ⊂ Rn −→ R uma função. Se o limite de f quando xaproxima-se de x0 existe, então ele é único.
Este teorema permite fazer simplificações no cálculo de limites.
Proposição 5.1. Sejam f, g : A ⊂ Rn −→ R, x0 ∈ A ∪ ∂A e c ∈ R, tal que
limx→x0f (x
) = L e limx→x0g(x
) = M , então:
1. limx→x0
c f (x) = c · L,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 103/407
5.1. LIMITES 103
2. limx→x0
(f (x) + g(x)) = L + M,
3. limx→x0
(f (x) · g(x)) = L · M,
4. limx→x0
f (x)
g(x) =
L
M se M = 0.
5. Em particular, se P = P (x) é um polinômio de várias variáveis:
limx→x0
P (x) = P (x0).
6. Se f (x) = P (x)Q(x)
é uma função racional:
limx→x0
P (x)
Q(x) =
P (x0)
Q(x0),
se x0 ∈ Dom(f ).
Observação 5.2. Do teorema, podemos concluir que se duas curvas passampelo ponto de abcissa x0 e originam valores diferentes para o limite de umafunção quando restrita às curvas, então o limite da função quando x se apro-xima de x0 não existe. Veja o exemplo [2].
Exemplos 5.1.
[1] Calcule lim(x,y)→(0,0)
x3
+ 2 x2
+ x y2
+ 2 y2
x2 + y2 .
Analogamente ao procedimento adotado no cálculo de limites de funçõesde uma variável, temos: x3 + 2 x2 + x y2 + 2 y2 = (x + 2)(x2 + y2), logo:
lim(x,y)→(0,0)
x3 + 2 x2 + x y2 + 2 y2
x2 + y2 = lim
(x,y)→(0,0)(x + 2) = 2.
[2] Calcule lim(x,y)→(0,0)
2 x y
x2 + y2.
Observemos que f é definida em R2
− {(0, 0)
}. Consideremos o seguinte
família de retas que passam pela origem: y = k x; f calculada para y = k x é
f (x,kx) = 2k
1 + k2 e:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 104/407
104 CAPÍTULO 5. LIMITES E CONTINUIDADE
lim(x,kx)→(0,0)
f (x , k x) = 2 k
1 + k2.
Figura 5.1: Exemplo [2].
Logo, sobre cada reta que passa pela origem, f tem um valor constante,mas que depende do coeficiente angular k, de cada reta. O limite da funçãof depende do percurso do ponto (x, y) quando ele tende à origem. Porexemplo, considere k = 0 e k = 1. Como o limite de f , se existe, é único,podemos afirmar que o limite de f no ponto (0, 0) não existe.
-0.1 -0.05 0 0.05 0.1
-0.1
-0.05
0
0.05
0.1
Figura 5.2: Curvas de nível e o gráfico de f .
[3] Calcule lim(x,y)→(0,0)
x2 y
x4 + y2.
Sejam a reta y = 0 e a parabóla y = x2. Então, f (x, 0) = 0 e:
lim(x,0)−→(0,0)
x2y
x4 + y2 = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 105/407
5.1. LIMITES 105
Por outro lado, f (x, x2) = 12 e:
lim(x,x2)−→(0,0)
x2y
x4 + y2 =
1
2.
Logo, o limite não existe. Veja as curvas de nível do G(f ):
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 5.3: Curvas de nível e o gráfico de f .
[4] Calcule lim(x,y)→(0,0)
sen(x2 + y2)
x2 + y2 .
Do cálculo em uma variável sabemos que limx−→0
sen(x)
x = 1. Logo, para todo
ε > 0, existe δ > 0 tal que 0 < |x| < δ < 1, implicasen(x)
x − 1 < ε. Por outro
lado se v = (x, y), então v2 = x2 + y2 e:
lim(x,y)→(0,0)
sen(x2
+ y2
)x2 + y2 = lim
v→0sen(v
2
)v2 ;
se 0 < v < δ , então 0 < v2 < δ 2 < δ pois 0 < δ < 1, e
|f (v) − 1| =sen(v2)
v2 − 1 < ε.
Logo,
lim(x,y)
→(0,0)
sen(x2 + y2)
x2 + y2 = 1.
Observemos que as curvas de nível e o gráfico de f são bem "comporta-dos"numa vizinhança de (0.0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 106/407
106 CAPÍTULO 5. LIMITES E CONTINUIDADE
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 5.4: Curvas de nível e gráfico, respectivamente.
[5] Calcule lim(x,y)→(0,0)
x2 y
x2 + y2.
A função f é definida em R2 − {(0, 0)}. Consideremos a família de retasy = k x; f calculada em y = k x é f (x , k x) = k x
1+k2. Logo:
lim(x,y)→(0,0)
x2 y
x2 + y2 = lim
(x,kx)→(0,0)
k x
k2 + 1 = 0.
Mas, isto não nos garante que o limite:
lim(x,y)→(0,0)
f (x, y) = 0.
Temos que utilizar a definição de limite. De fato, como x2 ≤ x2 + y2 e |y| ≤ x2 + y2, temos: x2y
x2 + y2
= x2 |y|x2 + y2
≤ (x2 + y2)
x2 + y2
x2 + y2 =
x2 + y2,
Tomando δ = ε, concluimos que x2 y
x2+y2
< ε, se 0 <
x2 + y2 < δ . Portanto,
lim(x,y)→(0,0)
x2 y
x2 + y2 = 0.
5.2 A não existência de um limite
A seguir, apresentaremos uma observação e um algoritmo para verificar anão existência de um limite, gentilmente cedidos pela Professora Patrícia

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 107/407
5.2. A NÃO EXISTÊNCIA DE UM LIMITE 107
Nunes da Silva do Departamento de Análise do IME-UERJ.
Consideremos o seguinte exemplo:
lim(x,y)→(0,0)
f (x, y) = lim(x,y)→(0,0)
x3
x2 + y.
É fácil verificar que:x3
x2 + y
tende a zero, se nos aproximamos da origem ao longo de retas ou curvas dotipo y = xk. No entanto, o limite acima não existe. Para determinar umacurva segundo a qual o valor do limite de f quando (x, y) se aproxima daorigem seja diferente de zero, devemos proceder do seguinte modo:
i) Procuramos uma curva da forma y(x) = α(x) − x2 com α(x) = 0. Temos:
f (x, y(x)) = f (x, α(x) − x2) = x3
α(x).
Como queremos nos aproximar da origem, a escolha de α(x) deve ser talque:
limx→0
y(x) = limx→0
(α(x) − x2) = 0.
Por outro lado, desejamos que x3
α(x) não se aproxime de zero. Por exemplo,
se α(x) = x3, temos:
lim(x,y)→(0,0) f (x, x3 − x2) = lim(x,y)→(0,0)
x3
x3 = 1.
ii) Agora, vamos generalizar esta idéia.
Devemos calcular o limite de uma função f quando (x, y) se aproxima deum ponto (x0, y0) e encontramos várias curvas ao longo das quais a funçãotende a zero. Sabemos que a função é dada pelo quociente de duas funçõesque se anulam em (x0, y0), isto é:
lim(x,y)
→(x0,y0)
f (x, y) = lim(x,y)
→(x0,y0)
p(x, y)
q (x, y), tal que
p(x0, y0) = q (x0, y0) = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 108/407
108 CAPÍTULO 5. LIMITES E CONTINUIDADE
Além disso, a função q = q (x, y) se anula ao longo de uma curva γ (x) quepassa pelo ponto (x0, y0) e, nesta curva, p = p(x, y) só se anula no ponto(x0, y0). Isto é:
γ (x0) = y0, q (x, γ (x)) = 0 e p(x, γ (x)) = 0,
para todo x = x0. Para encontrar uma curva ao longo da qual a função f não tende a zero devemos proceder do seguinte modo:
i) Procuramos uma curva da forma y(x) = γ (x) + α(x) com α(x) = 0.
ii) Avaliamos a função f (x, γ (x) + α(x)).
iii) Analisamos a função f (x, γ (x)+α(x)) a fim de determinar uma expressãoconveniente para α(x).
Exemplos 5.2.
Verifique que lim(x,y)→(0,0)
x3 + y3
x − y não existe.
Considere p(x, y) = x3 + y3, q (x, y) = x − y e p(0, 0) = q (0, 0) = 0.
i) Seja γ (x) = x, γ (0) = 0, q (x, γ (x)) = 0, p(x, γ (x)) = 2 x3 = 0 se x = 0. Sejay(x) = x + α(x) com α(x) = 0.
ii) Por outro lado:
f (x, x+α(x)) = x3 + (x + α(x))3
x − x − α(x) =
x3 + (x + α(x))3
−α(x) = − x3
α(x)− (x + α(x))3
α(x) .
Seja α(x) = x3; logo:
f (x, x + x3) = −1 − (1 + x2)3
e:
lim(x,y)→(0,0)
f (x, x + x3) = −1 − 1 = −2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 109/407
5.3. CONTINUIDADE 109
Figura 5.5: Projeção do G(f ), no plano xy.
5.3 Continuidade
Seja A ⊂ Rn e f : A ⊂ Rn −→ R uma função.
Definição 5.2. f é contínua em x0 ∈ A quando:
1. limx→x0
f (x) existe
2. limx→x0
f (x) = f (x0)
Equivalentemente, f contínua em x0, quando para todo ε > 0 existe δ > 0
tal que se:
x− x0 < δ, então |f (x) − f (x0)| < ε.
Definição 5.3. Dizemos que f é contínua em A se f é contínua em cadax0 ∈ A.
Exemplos 5.2.
[1] Se P = P (x
) é uma função polinomial de várias variáveis, então P écontínua em qualquer ponto do Rn.
[2] A seguinte função não é contínua na origem:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 110/407
110 CAPÍTULO 5. LIMITES E CONTINUIDADE
f (x, y) =
2 x y
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
De fato:
lim(x,y)→(0,0)
f (x, y) = lim(x,kx)→(0,0)
2 k
k2 + 1 =
2 k
k2 + 1
isto é, o limite não existe pois depende de k; logo, f não é contínua.
[3] A seguinte função é contínua na origem:
f (x, y) =
x2y
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
De fato:
lim(x,y)→(0,0)
x2y
x2 + y2 = f (0, 0) = 0.
Veja os desenhos da curvas de nível e gráfico de f , respectivamente:
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 5.6: Exemplo [3].
[4] Considere a função f (x, y) = arctgy
x
, f não é contínua no conjunto
A = {(0, y)/ y ∈ R}. Veja o gráfico e as curvas de nível de f :

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 111/407
5.3. CONTINUIDADE 111
-0.2 -0.1 0 0.1 0.2
-0.2
-0.1
0
0.1
0.2
Figura 5.7: Exemplo [4].
Observação 5.3. As propriedades das funções contínuas são análogas às dasfunções contínuas de uma variável. Suas provas seguem diretamente dadefinição.
Proposição 5.2. Sejam f, g : A ⊂ Rn −→ R funções contínuas no ponto x0.
Então:1. f + g e f · g são contínuas em x0.
2. Se f (x0) = 0 então 1
f é contínua em x0.
As provas seguem da definição.
Exemplos 5.3.
[1] As função elementares são contínuas nos pontos onde estão definidas.[2] As funções racionais nos pontos onde os polinômios do denominadornão se anulam, são contínuas.
[3] A função f (x, y) = x3 + y
x2 + 1 é contínua em R2.
Proposição 5.3. Sejam f : A ⊂ Rn −→ R uma função contínua no pontox0 ∈ A e g : I ⊂ R −→ R uma função tal que f (A) ⊂ I de modo que g ◦ f esteja bem definida. Se g é contínua em f (x0), então g ◦ f é contínua em x0.
Prova: Segue da definição.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 112/407
112 CAPÍTULO 5. LIMITES E CONTINUIDADE
Exemplos 5.4.
[1] A função f (x,y,z ) = (x2 + z 2 + y4)4 + sen(z 2) é contínua em R3.
A função f é a soma de duas funções contínuas:
f 1(x,y,z ) = (x2 + z 2 + y2)4 e f 2(x,y,z ) = sen(z 2).
f 1 é a composta da função h(x,y,z ) = x2 + z 2 + y2 e g(u) = u4, ambascontínuas e f 2 é a composta de h(x,y,z ) = z 2 e g(u) = sen(u), tambémcontínuas.
[2] A função:
h(x,y,z ) = (x2 + z 2 + y4)4 + sen(z 2)
x2 + y2 + z 2
é contínua em R3 − {(0, 0, 0)}.
De fato, escrevendo:
h(x,y,z ) = f (x,y,z )
g(x,y,z ),
onde f é a função do exemplo anterior e g(x,y,z ) = x2 + y2 + z 2 que écontínua e não nula, exceto na origem. Pela propriedade ii) temos que h écontínua em A = R3 − {(0, 0, 0)}.
[3] A função:
f (x) =
x
= x2
1 + x22 + ....... + x2
n
é contínua para todo x ∈ Rn. Em particular:
f (x1, x2, x3,.....,xn) ≥
x2i = |xi|,
para todo x ∈ Rn.
[4] Seja v = (x, y), então: x2 y
x2+y2
≤ v2 v v2 = v. Como lim
v→ 0 v = 0
temos
lim(x,y)→(0,0)
x2 y
x2 + y2 = 0 e lim(x,y)→(0,0)
x2 y
x2 + y2 = 0.
[5] Determine o valor de A para que a seguinte função seja contínua:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 113/407
5.3. CONTINUIDADE 113
f (x, y) =
sen(
x2 + y2) x2 + y2
se (x, y) = (0, 0)
A se (x, y) = (0, 0).
Seja v = (x, y); então,
lim(x,y)→(0,0)
sen(
x2 + y2) x2 + y2
= lim v→ 0
sen( v) v = 1;
logo, A = 1.
A seguinte proposição não será provada, pois ela decorre de um teorema,que fica fora do contexto destas notas.
Proposição 5.4. Seja h : Rn −→ R uma função contínua; então:
1. A = {x ∈ Rn / 0 < h(x)} é aberto em Rn.
2. F = {x ∈ Rn / 0 ≤ h(x)} é fechado em Rn.
3. ∂A = {x ∈ Rn / h(x) = 0}.
Exemplos 5.5.
[1] Os planos em R3 são conjuntos fechados. De fato, considere:
h(x,y,z ) = a x + b y + c z − d.
A função h é contínua em R
3
.[2] O sólido W = {(x,y,z ) ∈ R3/ x2 + y2 + z 2 ≤ r2, r > 0} é um conjuntofechado. De fato, considere:
h(x,y,z ) = x2 + y2 + z 2 − r2.
A função h é contínua em R3 e pela proposição W é fechado.
[3] A parábola A = {(x, y) ∈ R2/y = x2} é um conjunto fechado. De fato,considere:
h(x, y) = y−
x2.
A função é contínua em R2 e pela proposição A é fechado.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 114/407
114 CAPÍTULO 5. LIMITES E CONTINUIDADE
5.4 Exercícios
1. Utilizando as propriedades de limite, calcule:
(a) lim(x,y)→(0,1)
x3y
(b) lim(x,y)→(0,1)
exy
(c) lim(x,y)→(0,0)
xy
x2 + y2 + 2
(d) lim(x,y)→(0,0)
sen(xy)
xy
(e) lim(x,y)→(1,1)
x3y + y3 + 3
(f) lim(x,y)→(0,0)
sen2(xy)
(xy)2
(g) lim(x,y)→(1,1)
ln(|1 + x2 y3|)
(h) lim(x,y,z)→(1,2,6)
1x
+ 1
y +
1
z
2. Verifique se os limites das seguintes funções dadas existem no ponto(0, 0):
(a) f (x, y) = x2
x2 + y2
(b) f (x, y) = x3 + y3
x2 + y
(c) f (x, y) = 6x2y2 + 2xy3
(x2 + y2)2
(d) f (x, y) = x2
y2
x3 + y3
(e) f (x, y) = x3 + y3
(x2 + y)2
(f) f (x, y) = x4 + 3 x y2
x2 + y2
3. Verifique que os limites das seguintes funções existem se(x, y) → (0, 0):
(a) f (x, y) = x3 + y3
x2 + y2(b) f (x, y) =
xy x2 + y2
4. Verifique que:
(a) lim(x,y)→(0,0)
1 − cos√
x y
x = 0
(b) lim(x,y)→(0,0)
sen(x2 + y2)
1 − cos
x2 + y2
= 2

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 115/407
5.4. EXERCÍCIOS 115
5. Verifique que: limx→0
limy→0
x2
x2 + y2
= limy→0
limx→0
x2
x2 + y2
.
6. Seja: f (x, y) =
xsen1
y
se y = 0
0 se y = 0.. Verifique que:
(a) lim(x,y)→(0,0)
f (x, y) = 0
(b) limx→0
limy→0
f (x, y) = lim
y→0
limx→0
f (x, y).
7. Discuta a continuidade das seguintes funções:
(a) f (x, y) = xy
x2 + y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(b) f (x, y) =
x2y
x4 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(c) f (x, y) =
x + y
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(d) f (x, y) = x3 + y3
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(e) f (x, y) =
x3 y3
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(f) f (x, y) =
sen(x + y)
x + y se (x, y) = (0, 0)
2 se (x, y) = (0, 0).
(g) f (x,y,z ) = x z − y2
x2 + y2 + z 2 se (x,y,z ) = (0, 0, 0)
0 se (x,y,z ) = (0, 0, 0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 116/407
116 CAPÍTULO 5. LIMITES E CONTINUIDADE
8. Usando a composição de funções, verifique que as seguintes funçõessão contínuas:
(a) f (x, y) =
x2 + y2
(b) f (x, y) = xy
x2 + y2 + 1
(c) f (x, y) =
x4 + y4 + 1
(d) f (x, y) = sen(x2y + y2x)
(e) f (x, y) = sen(xy)
x2 + y2 ; x, y = 0
(f) f (x, y) = cos3(xy3)
(g) f (x, y) = 1 3 − sen(xy)
; x, y = 0
(h) f (x, y) = sech3(xy3)
(i) f (x,y,z ) = ln(
x2 + y2 + z 2 − 1)
(j) f (x,y,z ) = 1
x2 − y2 − z + 1
9. Calcule o valor de a para que a função
f (x, y) =
x2 y2 y2 + 1 − 1
se (x, y) = (0, 0)
a − 4 se (x, y) = (0, 0),
seja contínua.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 117/407
Capítulo 6
DERIVADAS PARCIAIS
6.1 Definições
Neste capítulo, apresentamos um dos conceitos centrais do Cálculo em Vá-rias Variáveis, as derivadas parciais e a diferenciação de funções.
Definição 6.1. Sejam A ⊂ R3 um conjunto aberto e f : A −→ R uma função.
1. A derivada parcial de f em relação à variável x , no ponto
(x,y,z ) ∈ A é denotada por ∂f
∂x(x,y,z ) e definida por:
∂f
∂x(x,y,z ) = lim
t−→0
f (x + t, y,z ) − f (x,y,z )
t
se o limite existe.
2. A derivada parcial de f em relação à variável y , no ponto
(x,y,z ) ∈ A é denotada por ∂f
∂y(x,y,z ) e definida por:
∂f
∂y(x,y,z ) = lim
t−→0
f (x, y + t, z ) − f (x,y,z )
t
se o limite existe.
3. A derivada parcial de f em relação à variável z , no ponto
(x,y,z ) ∈ A é denotada por ∂f
∂z (x,y,z ) e definida por:
117

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 118/407
118 CAPÍTULO 6. DERIVADAS PARCIAIS
∂f
∂z (x,y,z ) = lim
t−→0
f (x,y,z + t) − f (x,y,z )
t
se o limite existe.
Observações 6.1.
1. De forma análoga são definidas as derivadas parciais para funções deduas variáveis.
2. Observe que o conjunto A deve ser aberto, pois para todo x ∈ A énecessário que x + t ei ∈ A, onde i = 1, 2, 3; o que é verdadeiro se|t| < η (η > 0 pequeno). Veja a bibliografia.
Exemplos 6.1.
[1] Se z = f (x, y) = x y, calcule suas derivadas parciais.
Estamos no caso n = 2:
∂f
∂x(x, y) = lim
t−→0
f (x + t, y) − f (x, y)
t = lim
t−→0
(x + t) y − x y
t = lim
t−→0
t y
t = y,
∂f
∂y(x, y) = lim
t−→0
f (x, t + y) − f (x, y)
t = lim
t−→0
x (t + y) − x y
t = lim
t−→0
t x
t = x.
[2] Se w = f (x,y,z ) = x2 y z 2, calcule suas derivadas parciais.
Estamos no caso n = 3:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 119/407
6.1. DEFINIÇÕES 119
∂f
∂x(x,y,z ) = lim
t−→0
f (x + t, y,z ) − f (x,y,z )
t = lim
t−→0
(x + t)2 y z 2 − x2 y z 2
t
= limt−→0
2 x y z 2 t + t2yz 2
t = 2 x y z 2,
∂f
∂y(x,y,z ) = lim
t−→0
f (x, t + y, z ) − f (x,y,z )
t = lim
t−→0
x2 (t + y) z 2 − x2 y z 2
t
= limt−→0
t x2 z 2
t = x2 z 2,
∂f
∂z (x,y,z ) = lim
t−→0
f (x,y,t + z ) − f (x,y,z )
t = lim
t−→0
x2 y (t + z )2 − x2 y z 2
t
= limt−→0
t2 x2 y + 2 t x2 y z
t = 2 x2 y z.
Observação 6.1.
1. Seja y = c, fixado e consideremos g(x) = f (x, c); logo:
g′(x) = limt−→0
g(x + t) − g(x)
t = lim
t−→0
f (x + t, c) − f (x, c)
t =
∂f
∂x(x, c).
2. Se h(y) = f (c, y), então:
h′(y) = limt−→0
h(y + t) − h(y)
t = lim
t−→0
f (c, y + t) − f (c, y)
t =
∂f
∂y(c, y).
Analogamente para mais variáveis.
3. Consequentemente, para derivar parcialmente uma função em relaçãoa x, as demais variáveis são consideradas como constantes e a deriva-ção é feita como em R.
4. Em relação às outras variáveis o procedimento é análogo. Assim, to-das as regras de derivação estudadas para funções em R podem seraplicadas.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 120/407
120 CAPÍTULO 6. DERIVADAS PARCIAIS
Exemplos 6.1.
[1] Se z = f (x, y) =
x2 + y2, calcule suas derivadas parciais.
Calculemos, primeiramente, a derivada parcial de f em relação a x. Pelaobservação anterior consideramos z =
√ x2 + c, onde c = y2; derivando
como em R:
∂f
∂x(x, y) =
x√ x2 + c
= x
x2 + y2;
analogamente para y: fazemos c = x2:
∂f
∂y(x, y) =
y c + y2
= y
x2 + y2.
[2] Se z = f (x, y) = (x2 + y2) cos(x y), calcule suas derivadas parciais noponto (1, π).
Calculemos, primeiramente, a derivada parcial de f em relação a x. Pela ob-servação anterior consideramos z = (x2 + c2) cos(c x), onde y = c; derivandocomo em R:
∂f
∂x(x, y) =
(x2 + c2) cos(c x))′ = 2 xcos(c x) − c (x2 + c2) sen(c x)
= 2 xcos(x y) − y (x2 + y2) sen(x y);
analogamente para y: fazemos z = (c2 + y2) cos(c y):
∂f ∂y (x, y) =
(c2 + y2) cos(c y)′ = 2 y cos(c y) − c (c2 + y2) sen(c y)
= 2 ycos(x y) − x (x2 + y2) sen(x y));
∂f
∂x(1, π) = −2,
∂f
∂y(1, π) = −2 π.
[3] Se w = f (x,y,z ) = ln(x2 + y2 + z 2), calcule suas derivadas parciais.
Calculemos, primeiramente, a derivada parcial de f em relação a x.Seja w = ln(x2 + c), onde c = y2 + z 2; derivando como em R, temos:
∂f
∂x (x,y,z ) = 2 x
x2 + c = 2 x
x2 + y2 + z 2 ;
analogamente para y: fazemos c = x2 + z 2 e para z : c = x2 + y2:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 121/407
6.1. DEFINIÇÕES 121
∂f
∂y(x,y,z ) =
2 y
y2 + c =
2 y
x2 + y2 + z 2
e:
∂f
∂z (x,y,z ) = 2 z
c + z 2 = 2 z
x2 + y2 + z 2 .
[4] Se w = f (x,y,z ) = senx y
z
, calcule suas derivadas parciais.
Calculemos, primeiramente, a derivada parcial de f em relação a x:
Seja w = sen(c x), onde c = y
z ; derivando:
∂f
∂x(x,y,z ) = c cos(c x) =
y
z cosx y
z
;
analogamente para y; fazemos c = xz e para z ; fazemos c = x y:
∂f
∂y(x,y,z ) = c cos(c y) =
x
z cosx y
z
e
∂f
∂z (x,y,z ) = −c z −2cos(
c
z ) = −x y
z 2 cosx y
z
.
De forma análoga ao Cálculo de uma variável, as derivadas parciais de umafunção são funções e, portanto, podemos calcula-lás em pontos de seus do-mínios.
[5] Seja f (x, y) = ln (x2 + y2 + 1); então:
∂f
∂x(x, y) =
2 x
x2 + y2 + 1 e
∂f
∂y(x, y) =
2 y
x2 + y2 + 1.
Temos duas novas funções:
g(x, y) = 2 x
x2 + y2 + 1 e h(x, y) =
2 y
x2 + y2 + 1.
Logo,:
g(1, 1) = h(1, 1) = 2
3, g(3, −2) =
3
7 e h(1, −2) = −2
7.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 122/407
122 CAPÍTULO 6. DERIVADAS PARCIAIS
2
0
2
2
0
2
0
1
2
3
Figura 6.1: Gráfico de f .
Figura 6.2: Gráficos de g e h, respectivamente.
Observações 6.2.
1. A não existência das derivadas parciais de uma função contínua deduas variáveis num ponto indica que o gráfico da função apresenta"arestas"nesse ponto.
2. De fato, seja z = f (x, y) =
x2 + y2; então, as derivadas parciais exis-tem, exceto na origem.
Figura 6.3: Gráfico de f (x, y) =
x2 + y2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 123/407
6.2. GENERALIZAÇÕES 123
6.2 Generalizações
Definição 6.2. Seja A ⊂ Rn um conjunto aberto, x = (x1, x2,...,xn) ∈ A ef : A −→ R uma função. A derivada parcial de f em relação à j-ésimavariável no ponto x ∈ A é denotada por ∂f
∂xj(x) e definida por:
∂f
∂x j(x) = limt−→0
f (x1,...,x j + t, .., xn)−
f (x1,....,xn)
t ,
se o limite existe.
Fazendo j = 1,...,n, temos as derivadas parciais de f em relação à primeira,à segunda, à terceira, ......., à n-ésima variáveis, respectivamente. Denotandopor e j = (0, ...., 1, ....0) o vetor que tem todas as componentes zero exceto a
j-ésima, que é igual a 1, temos:
∂f
∂x j
(x) = limt−→
0
f (x + te j) − f (x)
t
.
6.3 Interpretação Geométrica das Derivadas Par-ciais
O gráfico de uma função de duas variáveis z = f (x, y) é, em geral, umasuperfície em R3. A interseção desta superfície com um plano paralelo aoplano xz , que passa pelo ponto (0, y0, 0) é uma curva plana (ou um ponto)que satisfaz às condições:
z = f (x, y)y = y0.
Como a curva é plana, podemos considerá-la como o gráfico de uma funçãode uma variável, a saber: g(x) = f (x, y0). Logo, o coeficiente angular da retatangente à curva no ponto x0, relativa ao plano, é:
g′(x0) = ∂f
∂x(x0, y0)
Analogamente, a curva plana definida pela interseção do gráfico de f com
o plano que passa por (x0, 0, 0) paralelo ao plano yz pode ser definida porh(y) = f (x0, y). Logo, o coeficiente angular da reta tangente à curva noponto y0, relativa ao plano, é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 124/407
124 CAPÍTULO 6. DERIVADAS PARCIAIS
h′(y0) = ∂f
∂y(x0, y0)
Desenhos à esquerda e à direita, respectivamente:
Figura 6.4:
Figura 6.5:
Exemplos 6.2.
[1] Seja z = f (x, y) = x2 + y2. Determine a equação da reta tangente àinterseção do gráfico de f com o plano de equação y = 2, no ponto (2, 2, 8).
Pela observação anterior: z = x2 + 4; logo, z = g(x) = x2 + 4 e a equação dareta tangente é: z − g(x0) = g ′(x0)(x − x0), onde x0 = 2, ou seja: z − 4x = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 125/407
6.3. INTERPRETAÇÃO GEOMÉTRICA DAS DERIVADAS PARCIAIS 125
-2
0
2
-2
0
2
0
2
4
6
-2
0
2
4
Figura 6.6: Exemplo [1].
[2] Seja z = f (x, y) = y2. Determine a equação da reta tangente à interseçãodo gráfico de f com o plano de equação x = x0, no ponto (x0, 1, 1).
Pela observação anterior: z = y2; logo z = h(y) = y2 e a equação da retatangente é: z − h(y0) = h′(y0) (y − y0), onde y0 = 1, ou seja: z − 2y + 1 = 0.
1
Figura 6.7: Exemplo [2].
Dos parágrafos anteriores temos:Proposição 6.1. Seja f : A ⊂ R2 −→ R uma função tal que as derivadas parciaisexistam no conjunto aberto A, então:
∂f
∂x(a, b) = g ′(a) se g(x) = f (x, b)
∂f
∂y(a, b) = h′(b) se h(y) = f (a, y)
A prova segue das definições e observações anteriores. Esta proposição seestende naturalmente para n ≥ 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 126/407
126 CAPÍTULO 6. DERIVADAS PARCIAIS
Exemplos 6.3.
[1] Se f (x, y) = 4
x4 + y4, calcule ∂f
∂x(0, 0) e
∂f
∂y(0, 0).
Seja g(x) = f (x, 0) = x e h(y) = f (0, y) = y ; logo g ′(x) = 1 e h′(y) = 1; então:
∂f
∂x (0, 0) =
∂f
∂y (0, 0) = 1.
[2] Se f (x, y) = x2
(x2 + y2 ln(y2 + 1))−5 etg(x2 y+y3 x2), calcule ∂f
∂x(1, 0).
Seja g(x) = f (x, 0) = x−3 e g ′(x) = −3 x−4; logo:
∂f
∂x(1, 0) = g ′(1) = −3.
[3] Se f (x,y,z ) = cos(x + y + z )
ln(x2 + y2 + z 2), calcule
∂f
∂x(π, 0, 0).
Seja g(x) = f (x, 0, 0) = cos(x)
2 ln(x) e g ′(x) = −x ln(x) sen(x) + cos(x)
2 ln2(x) ; logo:∂f
∂x(π, 0, 0) = g ′(π) =
1
2 π ln2(π).
6.4 Derivadas Parciais como Taxa de Variação
As derivadas parciais também podem ser interpretadas como taxa de vari-ação ou razão instantânea.
De fato, sejam A ⊂ R2 aberto e f : A −→ R uma função tal que as derivadas
parciais existem no ponto (x0, y0).
Definição 6.3. A derivada parcial ∂f
∂x(x0, y0) é a taxa de variação de f ao
longo da reta que passa pelo ponto (x0, y0) e na direção e1 = (1, 0).
Observações 6.3.
1. Isto é, a taxa de variação de f ao longo d a reta:
c(t) = (x0, y0) + t (1, 0) = (x0 + t, y0),
tal que (|t| pequeno).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 127/407
6.4. DERIVADAS PARCIAIS COMO TAXA DE VARIAÇÃO 127
2. De forma análoga interpretamos a outra derivada parcial: ∂f
∂y(x0, y0) é
a taxa de variação de f ao longo da reta que passa pelo ponto (x0, y0)e na direção e2 = (0, 1), isto é, d(t) = (x0, y0) + t (0, 1) = (x0, y0 + t), (|t|pequeno).
0
0+t
0 0+t
e
e
2
1
Ay
y
x x
d(t) d(t)
c(t)
c(t)
Figura 6.8:
3. Isto é, as derivadas parciais medem a velocidade da variação parcialda função em relação a cada variável, quando as outras estão fixadas.
Exemplos 6.4.
[1] A lei de um gás ideal confinado é P V = 8 T , onde P é a pressão emN/cm2, V é o volume em cm3 e T é a temperatura em graus. Se o volume
do gás é de 150 cm3
e a temperatura é de 100o
, pede-se:(a) Determine a taxa de variação da pressão em relação à temperatura parao volume fixo de 150 cm3.
(b) Determine a taxa de variação do volume em relação à pressão para atemperatura fixa de 100o.
(a) Escrevamos a pressão em função do volume e da temperatura:
P (V, T ) = 8 T
V ; então,
∂P
∂T (V, T ) =
8
V ;
logo,∂P
∂T (150, T ) ∼= 0.0533 N/cm2/kal.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 128/407
128 CAPÍTULO 6. DERIVADAS PARCIAIS
A variação da pressão em relação à temperatura cresce a uma razão de
0.0533 N/cm2/kal. Note que ∂P
∂T não depende de T .
(b) Escrevemos o volume em função da pressão e da temperatura:
V (P, T ) = 8 T
P ; então,
∂V
∂P (P, T ) =
−8
T
P 2.
Por outro lado, P = 8 T
V e para T = 100 e V = 150, obtemos P =
16
3 ; logo:
∂V
∂P (
16
3 , 100) = −28.13 cm3/N.
A variação do volume em relação à pressão diminui a uma razão de:
28.13 cm3/N.
[2] O potencial elétrico no ponto (x,y,z ) é dado por:
V (x,y,z ) = x x2 + y2 + z 2
,
onde V é dado em volts e x, y e z em cm. Determine a taxa de variaçãoinstantânea de V em relação à distância em (1, 2, 3) na direção do:
(a) eixo dos x;
(b) eixo dos y;
(c) eixo dos z .
(a) Devemos calcular ∂V
∂x(1, 2, 3). Seja g(x) = f (x, 2, 3) =
x√ x2 + 13
; então:
∂V ∂x
(x, 2, 3) = g ′(x) = 13(x + 13)3/2
,
logo; ∂V
∂x(1, 2, 3) =
13
14√
14volts/cm.
(b) Devemos calcular ∂V
∂y (1, 2, 3): Seja h(y) = f (1, y, 3) =
1 y2 + 10
; então:
∂V
∂y = h′(y) = − y
(y2 + 10)3/2,
logo; ∂V
∂y
(1, 2, 3) =
− 1
7 √ 14
volts/cm.
(c) Devemos calcular ∂V
∂z (1, 2, 3): Seja k(z ) = f (1, 2, z ) =
1√ z 2 + 5
; então:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 129/407
6.4. DERIVADAS PARCIAIS COMO TAXA DE VARIAÇÃO 129
∂V
∂z = k ′(z ) = − z
(z 2 + 5)3/2,
logo; ∂V
∂z (1, 2, 3) = − 3
14√
14volts/cm.
[3] Quando materiais tóxicos são despejados ou manipulados num aterropodem ser liberadas partículas contaminadas para a atmosfera circundante.Experimentalmente, a emissão destas partículas pode ser modelada pelafunção:
E (V, M ) = K × 0.00032 V 1.3 M −1.4,
onde E é a emissão (quantidade de partículas liberadas na atmosfera por to-nelada de solo manipulado), V é a velocidade média do vento (mph=metrospor hora), M é a umidade contida no material (dada em porcentagem) e K é uma constante que depende do tamanho das partículas. Calcule a taxa devariação da emissão para uma partícula tal que K = 0.2, V = 10 e M = 13
em relação:
(a) ao vento;
(b) à umidade.
10 20 30 40 50
10
20
30
40
50
Figura 6.9: Curvas de nível de E .
(a) Calculamos ∂E
∂V (10, 13): Então,
∂E
∂V (V, M ) = 0.000122 V 0.3 M −1.4; logo,
∂E
∂V (10, 13) = 0.00001496.
(b) Calculamos ∂E
∂M (10, 13): Então,
∂E
∂M (V, M ) = −0.000291 V 1.3 M −2.4; logo,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 130/407
130 CAPÍTULO 6. DERIVADAS PARCIAIS
∂E
∂M (10, 13) = −0.00001234.
Interprete os resultados obtidos no último exemplo.
6.5 DiferenciabilidadeNo caso de uma variável sabemos que se uma função é derivável numponto, ela é contínua no ponto. Gostaríamos de ter um comportamento aná-logo para funções de várias variáveis; no entanto, a existência das derivadasparciais não garante a continuidade da função.
De fato, a existência de ∂f
∂x depende do comportamento da função f so-
mente na direção do eixo dos x e a existência de ∂f
∂y depende do comporta-
mento da função f somente na direção do eixo dos y. Por exemplo, sabemosque a função:
f (x, y) =
2 x y
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0),
não é contínua na origem. No entanto, as derivadas parciais existem emtodos os pontos, inclusive na origem. De fato, sejam g(x) = f (x, 0) = 0 eh(y) = f (0, y) = 0; logo:
∂f
∂x(0, 0) = g ′(0) = 0 e
∂f
∂y(0, 0) = h′(0) = 0.
As derivadas parciais para (x, y) = (0, 0) são:
∂f
∂x =
2 y3 − 2 x2 y
(x2 + y2)2 e
∂f
∂y =
2 x3 − 2 x y2
(x2 + y2)2 .
Em uma variável, a existência da derivada de uma função num ponto, ga-rante que nas proximidades desse ponto o gráfico da função fica bastantepróximo da reta tangente a esse gráfico no ponto considerado. Seguiremosesta idéia para estender o conceito de diferenciabilidade para funções devárias variáveis. Correspondendo à reta tangente num ponto do gráfico deuma função em R temos o "plano tangente"num ponto do G(f ) e este planodeve ser uma "boa"aproximação para o G(f ) numa vizinhança do ponto.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 131/407
6.5. DIFERENCIABILIDADE 131
Definição 6.4. Seja f : A ⊂ Rn −→ R uma função definida no conjuntoaberto A. Dizemos que f é diferenciável no ponto x0 ∈ A se existem asderivadas parciais de f em x0 e:
limh→0f (x) − f (x0) −
n
j=1
∂f ∂xj
(x0)h j
h = 0,
onde h = x − x0, h j é a componente j-ésima de h e x ∈ A.
Para n = 2, este limite expressa o que pensamos ao dizer que:
f (x0, y0) + ∂f
∂x(x0, y0) (x − x0) +
∂ f
∂y(x0, y0) (y − y0),
é uma boa aproximação para f numa vizinhança de x0 = (x0, y0).
Definição 6.5. f é diferenciável em A
⊂Rn, se é diferenciável em cada ponto
de A.
Exemplos 6.2.
Considere a função:
f (x, y) =
x2y
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0),
f é contínua em (0, 0); suas derivadas parciais são:
∂f
∂x(0, 0) =
∂f
∂y(0, 0) = 0,
∂f
∂x(x, y) =
2 x y3
(x2 + y2)2
e:
∂f
∂y(x, y) =
x2 (x2 − y2)
(x2 + y2)2 .
Agora, apliquemos a definição de diferenciabilidade para f no ponto (0, 0):
lim(x,y)−→(0,0) |f (x, y)
|(x, y) = lim(x,y)−→(0,0) |x2y
|(x2 + y2)
x2 + y2 ;
considere y = k x, k > 0:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 132/407
132 CAPÍTULO 6. DERIVADAS PARCIAIS
lim(x,k x)→(0,0)
|x2y|(x2 + y2)
32
= lim(x,kx)→(0,0)
|kx3|(x2 + k2x2)
32
= lim(x,kx)→(0,0)
±k
(1 + k2)32
= ± k
(1 + k2)32
;
o limite depende de k; logo f não é diferenciável em (0, 0).
Figura 6.10: Gráfico de f .
Observação 6.2. Aplicar diretamente a definição de função diferenciávelpode ser, em muitos casos, bastante complicado. Por isso, apresentamoso seguinte teorema:
Teorema 6.1. Seja f : A ⊂ Rn −→ R uma função definida no conjuntoaberto A tal que existem todas as derivadas parciais em cada ponto de A ecada uma delas é contínua no ponto x0 ∈ A. Então f é diferenciável em x0.
Observação 6.3. O teorema estabelece apenas uma condição suficiente, ouseja, nem todas as funções diferenciáveis num pontox0 devem ter derivadasparciais contínuas numa vizinhança de x0. Para a prova do teorema, veja oapêndice.
Exemplos 6.5.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 133/407
6.5. DIFERENCIABILIDADE 133
[1] Considere a seguinte função
f (x, y) =
x2y2
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
As derivadas parciais são:
∂f
∂x(0, 0) =
∂f
∂y(0, 0) = 0,
∂f
∂x(x, y) =
2xy4
(x2 + y2)2 e
∂f
∂y(x, y) =
2x4y
(x2 + y2)2.
As derivadas parciais existem em todo ponto. Aplicaremos o teorema paraprovar a diferenciabilidade de f no ponto (0, 0). Para isto provaremos queas derivadas parciais são contínuas no ponto (0, 0).
lim(x,y)
→(0,0)
∂f
∂x(x, y) = lim
(x,y)
→(0,0)
2xy4
(x2 + y2)2 =
∂f
∂x(0, 0) = 0.
De fato, |x| ≤
x2 + y2 e y4 ≤ (x2+y2)2; logo, |2x y4|(x2+y2)2
≤ 2
x2 + y2; se δ = ε2,
teremos 2 x y4
(x2 + y2)2 < ε se 0 <
x2 + y2 < δ . Analogamente para a outra
derivada parcial.
Figura 6.11: Exemplo [1].
[2] Os polinômios em várias variáveis são claramente diferenciáveis emtodo ponto de Rn.
[3] A função z = f (x, y) =
x2 + y2 é diferenciável em R2 − {(0, 0)}. Defato:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 134/407
134 CAPÍTULO 6. DERIVADAS PARCIAIS
∂f
∂x =
x x2 + y2
e ∂f
∂y =
y x2 + y2
e ambas são funções contínuas em R2 − {(0, 0)}.
Definição 6.6. Uma função é dita de classe C 1 em A quando existem asderivadas parciais em cada ponto de A e estas são contínuas. Logo f declasse C 1 implica em f diferenciável.
Proposição 6.2. Se f e g são funções de classe C 1 no ponto x0, então:
1. f + g é de classe C 1 em x0.
2. f g é de classe C 1 em x0.
3. Se g(x0) = 0,
f
g é de classe C
1
em x
0.
As provas seguem da aplicação direta da definição.
Exemplos 6.6.
[1] As função definidas por polinômios de várias variáveis são de classe C 1.
[2] A função f (x, y) = xy2 + y
x2 + y2 + 1 é diferenciável em todo R2. De fato,
escrevendo:
f (x, y) = f 1(x, y) + f 2(x, y)
f 3(x, y),
onde f 1(x, y) = xy2, f 2(x, y) = y e f 3(x, y) = x2 + y2 + 1, vemos que as trêsfunções são diferenciáveis em todo o plano, pois são polinômios e f 3 nãose anula em nenhum ponto do plano. Pelas propriedades anteriores, f édiferenciável em R2.
Teorema 6.2. Se f é diferenciável no ponto x0, então f é contínua em x0.
Para a prova, veja o apêndice. Se f é de classe C 1, então f é diferenciável eportanto f é contínua.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 135/407
6.5. DIFERENCIABILIDADE 135
Observações 6.4.
1. O plano tangente ao gráfico de uma função f num ponto é o planoque contem todas as retas tangentes ao gráfico de f que passam peloponto.
2. Se todas as retas tangente a esse ponto não são co-planares, então di-zemos que o plano tangente não existe.
3. Nos próximos parágrafos daremos uma justificativa para a seguintedefinição:
Definição 6.7. Seja f : A ⊂ R2 −→ R uma função diferenciável no ponto(x0, y0). A equação do plano tangente ao G(f ) no ponto (x0, y0, f (x0, y0)) é:
z = f (x0, y0) +
∂f
∂x (x0, y0) (x − x0) +
∂ f
∂y (x0, y0) (y − y0)
Figura 6.12: Plano tangente ao G(f ).
Segue, de imediato, que os vetores normais ao plano tangente no ponto(x0, y0, z 0), onde z 0 = f (x0, y0), são:
n(x0, y0, z 0) = ±
∂f
∂x(x0, y0),
∂f
∂y(x0, y0), −1

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 136/407
136 CAPÍTULO 6. DERIVADAS PARCIAIS
Exemplos 6.7.
[1] Determine a equação do plano tangente ao gráfico de:
z = (x2 + y2 + 1) e−(x2+y2)
no ponto (0, 0, 1).
Observemos que f (x, y) = (x2 + y2 + 1) e−(x2+y2) é uma função diferenciávelem R2. Sejam g(x) = f (x, 0) = (1 + x2) e−x2 e h(y) = f (0, y) = (1 + y2) e−y2;logo, g ′(x) = −2 x3 e−x2 e h′(y) = −2 y3 e−y2 e:
∂f
∂x(0, 0) = g ′(0) = 0;
∂f
∂y(0, 0) = h′(0) = 0
e f (0, 0) = 1. A equação do plano tangente no ponto (0, 0, 1) é:
z = 1.
Figura 6.13: Plano tangente do exemplo [1].
[2] Determine a equação do plano tangente ao gráfico de z = x − 6 y2 nospontos (1, 1, f (1, 1)) e (−1, −1, f (−1, −1)).
Como f é diferenciável em R2: f (1, 1) = −5 e f (−1, −1) = −7. Por outrolado:
∂f
∂x(x, y) = 1,
∂f
∂y(x, y) = −12 y.
As equações dos planos tangente ao G(f ) nos pontos (1, 1, −5) e(−1, −1, −7) são:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 137/407
6.6. APROXIMAÇÃO LINEAR 137
z = x − 12 y + 6 e z = x + 12 y + 6,
respectivamente.
Figura 6.14: Plano tangente do exemplo [2].
[3] Determine a equação do plano tangente ao gráfico de z = ex−y + x y2 noponto (1, 1, 2).
Note que f é diferenciável em R2:
f (1, 1) = 2, ∂f
∂x(x, y) = ex−y + y2 e
∂f
∂y(x, y) = −ex−y + 2 x y.
A equação do plano tangente ao G(f ) no ponto (1, 1, 2) é:
z = 2 x + y − 1.
Os vetores normais no ponto (1, 1, 2) são n = (2, 1, −1) e n = (−2, −1, 1).
6.6 Aproximação Linear
Como em Cálculo I, podemos usar a "boa"aproximação do plano tangenteao gráfico numa vizinhança de um ponto para efetuar cálculos numéricosaproximados.
Definição 6.8. Seja f diferenciável no ponto x0. A aproximação linear de f ao redor de x0 é denotada por l e definida como:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 138/407
138 CAPÍTULO 6. DERIVADAS PARCIAIS
1. se n = 2 e z 0 = f (x0, y0):
l(x, y) = z 0 + ∂ f
∂x(x0, y0)(x − x0) +
∂f
∂y(x0, y0)(y − y0)
2. se n = 3, x0 = (x0, y0, z 0) e w0 = f (x0):
l(x,y,z ) = w0 + ∂f
∂x(x0) (x − x0) +
∂f
∂y(x0) (y − y0) +
∂ f
∂z (x0) (z − z 0)
Seja ε > 0 pequeno. Para todo x ∈ B(x0, ε), o erro da aproximação é:
E (x) = |f (x) − l(x)|e satisfaz:
limx−→x0
E (x)x− x0 = 0.
Em outras palavras l(x) aproxima f (x) numa vizinhança de x0. A funçãol(x) também é chamada linearização de f numa vizinhança de x0.
Exemplos 6.8.
[1] Suponha que não dispomos de calculadora ou de outro instrumento decálculo e precisamos resolver os seguintes problemas:
(a) Se:
T (x, y) = x ex y
representa a temperatura num ponto (x, y) numa certa região do plano, cal-cular as seguintes temperaturas T (1.0023, 0.00012) e T (0.00012, 1.0023).
(b) Se:
ρ(x,y,z ) = ln(
x2 + y2 + z 2)
representa a densidade de um ponto (x,y,z ) numa certa região do espaçoque não contem a origem, determine ρ(1.005, 0.007, 1.01).
(c) Calcule, aproximadamente, o valor de
√ 1.01
2
+ 4.01
2
+ 8.002
2
.(a) Como (1.0023, 0.00012) está perto de (1, 0) acharemos a linearização de T numa vizinhança de (1, 0). Isto é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 139/407
6.6. APROXIMAÇÃO LINEAR 139
l(x, y) = T (1, 0) + ∂ T
∂x(1, 0) (x − 1) +
∂ T
∂y (1, 0) y
= 1 + ∂T
∂x(1, 0) x +
∂ T
∂y (1, 0) y − ∂ T
∂x(1, 0).
∂T ∂x
(x, y) = ex y (1 + x y) e ∂T ∂y
(x, y) = ex y x2; então, numa vizinhança do
ponto (1, 0), temos:
x ex y ≃ x + y.
O ponto (1.0023, 0.00012) está perto do ponto (1, 0), logo:
1.0023 × e1.0023×0.00012 ≃ 1.0023 + 0.00012 = 1.00242.
1
1
Figura 6.15: Vista de x ex y e x + y ao redor de (1, 0).
Analogamente, como (0.00012, 1.0023) está perto de (0, 1) acharemos a line-arização de T numa vizinhança de (0, 1). Isto é:
l(x, y) = T (0, 1) + ∂ T
∂x(0, 1) x +
∂ T
∂y (0, 1) (y − 1)
= ∂T
∂x(0, 1) x +
∂ T
∂y (0, 1) y − ∂ T
∂y (0, 1)
= x.
Então, numa vizinhança do ponto (0, 1), temos:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 140/407
140 CAPÍTULO 6. DERIVADAS PARCIAIS
x ex y ≃ x.
Logo: T (0.00012, 1.0023) ≃ 0.00012.
(b) Devemos determinar a linearização de ρ numa vizinhança de (1, 0, 1).Isto é:
l(x,y,z ) = ρ(1, 0, 1) + ∂ρ
∂x(1, 0, 1) (x − 1) +
∂ ρ
∂y(1, 0, 1) y +
∂ρ
∂z (1, 0, 1) (z − 1).
Temos:
∂ρ
∂x(x,y,z ) =
x
x2 + y2 + z 2,
∂ρ
∂y(x,y,z ) =
y
x2 + y2 + z 2 e
∂ρ
∂z (x,y,z ) =
z
x2 + y2 + z 2.
Então, numa vizinhança do ponto (1, 0, 1), temos:
ln(
x2 + y2 + z 2) ≃ x + z + ln(2)
2 − 1.
Logo: ρ(1.005, 0.007, 1.01) ≃ 0.354.
(c) Seja a função f (x,y,z ) =
x2 + y2 + z 2.Consideremos o ponto (x0, y0, z 0) = (1, 4, 8) e determinemos a linearizaçãode f numa vizinhança do ponto (1, 4, 8):
l(x,y,z ) = f (1, 4, 8)+
∂f
∂x (1, 4, 8) (x−1)+
∂f
∂y (1, 4, 8) (y−4)+
∂f
∂z (1, 4, 8) (z −8).
Temos:
∂f
∂x(x,y,z ) =
x
f (x,y,z ),
∂f
∂y(x,y,z ) =
y
f (x,y,z )e
∂f
∂z (x,y,z ) =
z
f (x,y,z ).
Logo, f (1, 4, 8) = 9, ∂f ∂x
(1, 4, 8) = 19
, ∂f ∂y
(1, 4, 8) = 49
e ∂f ∂z
(1, 4, 8) = 89
; então,
numa vizinhança do ponto (1, 4, 8), temos:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 141/407
6.6. APROXIMAÇÃO LINEAR 141
x2 + y2 + z 2 ≃ 1
9 (x + 4 y + 8 z ),
Em particular, no ponto (1.01, 4.01, 8.002):
1.012 + 4.012 + 8.0022 ≃ 1
9 (1.01 + 4 × (4.01) + 8 × (8.002)) ≃ 9.0073.
[2] Lei de gravitação de Newton. A força de atração entre dois corpos demassa m e M , respectivamente, situados a uma distância r é dada por:
F (m,M,r) = G m M
r2 ,
onde G é a constante de gravitação. Determinemos a linearização da função
F ao redor do ponto (m0, M 0, r0).∂F
∂m(m,M,r) =
G M
r2 ,
∂F
∂M (m,M,r) =
G m
r2
e:
∂F
∂r (m,M,r) = −2 G m M
r3 ;
logo, no ponto (m0, M 0, r0), temos:
l(m,M,r) = G
r30(M 0 r0 m + m0 r0 M − 2 m0 M 0 r + m0 M 0 r0).
Por exemplo, se m0 = 1, M 0 = 2 e r0 = 1, temos que:
F (m,M,r) ≃ G (2 m + M − 4 r + 2),
para todo (m,M,r) numa vizinhança de (1, 2, 1).
[3] Um depósito de material radioativo tem o formato de um cilindro circu-
lar reto e deve possuir altura no lado interno igual a 6 cm, raio interno com2 cm e espessura de 0.1 cm. Se o custo de fabricação do depósito é de 10 cvpor cm3. (cv= centavos), determine o custo aproximado do material usado.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 142/407
142 CAPÍTULO 6. DERIVADAS PARCIAIS
Figura 6.16: Depósito de material radioativo.
O volume exato do depósito é a diferença entre os volumes dos cilindrosC 1 e C , onde C 1 tem raio r1 = 2.1 e altura h1 = 6.2 e C tem raio r = 2 ealtura h = 6. Determinemos a aproximação linear do volume do cilindro:V (r, h) = π r2 h. Como V (2, 6)) = 24 π,
∂V
∂r (r, h) = 2 π r h e
∂V
∂h(r, h) = π r2;
então, numa vizinhança do ponto (2, 6), temos: l(r, h) = 4 π(6 r + h − 12). Ovolume de C 1 é V C 1
∼= l(2.1, 6.2) = 27.2 π e o volume total é V =
27.2 π −24 π
cm3 = 3.2 π cm3. Logo o custo aproximado é de 10 × 3.2 π ∼= 100.58 cv.
O argumento desenvolvido neste parágrafo se generaliza facilmente paramais de 3 variáveis:
[4] Suponha que 4 resistores num circuito são conectados em paralelo; aresistência R do circuito é dada por:
R(r1, r2, r3, r4) =
1
r1+
1
r2+
1
r3+
1
r4
−1.
Determine a linearização de R numa vizinhança do ponto (10, 20, 40, 10),onde os ri são medidos em Ohms. Seja x = (r1, r2, r3, r4):
∂R
∂r1(x) =
(R(r1, r2, r3, r4))2
r21,
∂R
∂r2(x) =
(R(r1, r2, r3, r4))2
r22,
∂R
∂r3(x) =
(R(r1, r2, r3, r4))2
r23,
∂R
∂r4(x) =
(R(r1, r2, r3, r4))2
r24.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 143/407
6.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 143
Logo, numa vizinhança do ponto (10, 20, 40, 10), temos:
R(r1, r2, r3, r4) ≃ 1
121 (16 r1 + 4 r2 + r3 + 16 r4).
6.7 Derivadas Parciais de Ordem Superior
Seja f : A ⊂ R2 −→ R uma função tal que suas derivadas parciais existemem todos os pontos (x, y) ∈ A. As derivadas parciais são, em geral, fun-ções de x e y e podemos perguntar se as derivadas parciais destas funçõesexistem:
∂f
∂x, ∂f
∂y : A ⊂ R2 −→ R.
Definição 6.9. As derivadas parciais de segunda ordem de f são definidase denotadas por:
∂
∂x
∂f
∂x
(x, y) = lim
t→0S
∂f ∂x (x + t, y) − ∂f
∂x (x, y)
t
∂
∂x
∂f
∂y
(x, y) = lim
t→0
∂f ∂y
(x + t, y) − ∂f ∂y
(x, y)
t
∂
∂y ∂f
∂x (x, y) = lim
t→0
∂f ∂x (x, y + t) − ∂f
∂x (x, y)
t
∂
∂y
∂f
∂y
(x, y) = lim
t→0
∂f ∂y
(x, y + t) − ∂f ∂y
(x, y)
t ,
se os limites existem.
As notações usuais são:
∂
∂x ∂f
∂x (x, y) =
∂ 2f
∂x2(x, y)
∂
∂x ∂f
∂y (x, y) =
∂ 2f
∂x∂y(x, y)
∂
∂y
∂f
∂x
(x, y) =
∂ 2f
∂y∂x(x, y)
∂
∂y
∂f
∂y
(x, y) =
∂ 2f
∂y2(x, y)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 144/407
144 CAPÍTULO 6. DERIVADAS PARCIAIS
Exemplos 6.9.
[1] Calcule as derivadas parciais de segunda ordem de:
f (x, y) = x2 y3.
Primeiramente, calculamos as de primeira ordem:∂f
∂x = 2 x y3 e
∂f
∂y = 3 x2 y2; logo:
∂ 2f
∂x2 =
∂
∂x
∂f
∂x
=
∂
∂x
2 x y3
= 2 y3,
∂ 2f
∂y2 =
∂
∂y
∂f
∂y
=
∂
∂y
3 x2 y2
= 6 x2 y,
∂ 2f
∂x∂y
= ∂
∂x
∂f
∂y =
∂
∂x3 x2 y2 = 6 x y2,
∂ 2f
∂y∂x =
∂
∂y
∂f
∂x
=
∂
∂y
2 x y3
= 6 x y2.
[2] Calcule as derivadas parciais de segunda ordem de:
= f (x, y) = ln(x2 + y2).
Primeiramente, calculamos as de primeira ordem:
∂f
∂x = 2x
x2 + y2 e ∂f
∂y = 2y
x2 + y2 ; logo:
∂ 2f
∂x2 =
∂
∂x
2x
x2 + y2
=
2 (y2 − x2)
(x2 + y2)2 ,
∂ 2f
∂y2 =
∂
∂y
2y
x2 + y2
=
2(x2 − y2)
(x2 + y2)2,
∂ 2f
∂x∂y =
∂
∂x 2 y
x2 + y2 = −4xy
(x2 + y2)2,
∂ 2f
∂y∂x =
∂
∂y
2 x
x2 + y2
=
−4 x y
(x2 + y2)2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 145/407
6.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 145
Em geral, se f : A ⊂ Rn −→ R é uma função tal que suas derivadas parci-ais existem em todos os pontos x ∈ A, definimos as derivadas parciais desegunda ordem de f da seguinte forma:
∂
∂x j ∂f
∂xi (x) = lim
t→0
∂f ∂xi
(x + te j ) − ∂f ∂xi
(x)
t ,
se os limites existem. A notação é ∂
∂x j
∂f
∂xi
(x) =
∂ 2f
∂x j ∂xi(x). Logo, defini-
mos n2 funções:
∂
∂x j
∂f
∂xi
: A ⊂ Rn −→ R.
Se n = 2 temos 4 derivadas parciais de segunda ordem e se n = 3 temos 9derivadas parciais de segunda ordem. Se i = j :
∂
∂xi
∂f
∂xi
(x) =
∂ 2f
∂x2i
(x).
Analogamente, definimos as derivadas de ordem 3, 4, etc. Por exemplo,para i, j, k = 1....n:
∂ 3f
∂x j ∂xi∂xk(x) =
∂
∂x j
∂ 2f
∂xi∂xk
(x).
Primeiramente, calculamos as de primeira ordem:
Exemplos 6.10.
[1] Calcule as derivadas parciais de segunda ordem de:
f (x,y,z ) = x y z.
Calculemos as de primeira ordem:
∂f
∂x = y z ,
∂f
∂y = x z e
∂f
∂z = x y, logo:
∂ 2f
∂x2 =
∂
∂x(y z ) = 0,
∂ 2f
∂y2 =
∂
∂y(x z ) = 0,
∂ 2f
∂z 2 =
∂
∂z (x y) = 0,
∂ 2f
∂x∂y =
∂
∂x(x z ) = z,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 146/407
146 CAPÍTULO 6. DERIVADAS PARCIAIS
∂ 2f
∂x∂z =
∂
∂x(x y) = y,
∂ 2f
∂y∂x =
∂
∂y(y z ) = z,
∂ 2f
∂y∂z =
∂
∂y(x y) = x,
∂ 2f
∂z∂x =
∂
∂z (y z ) = y,
∂ 2f ∂z∂y
= ∂ ∂z
(x z ) = x.
[2] Calcule as derivadas parciais de segunda ordem de:
f (x,y,z ) = sen(x y z ).
Calculemos as de primeira ordem:
∂f
∂x = y z cos(x y z ),
∂f
∂y = x z cos(x y z ) e
∂f
∂z = x y cos(x y z ); logo:
∂ 2f ∂x2
== −y2 z 2 sen(x y z ),
∂ 2f
∂y2 = −x2 z 2 sen(x y z ),
∂ 2f
∂z 2 = −x2 y2 sen(x y z ),
∂ 2f
∂x∂y = z cos(x y z )−x y z 2 sen(x y z ),
∂ 2f
∂x∂z = y cos(x y z )−x y2 z sen(x y z ),
∂ 2f ∂y∂x
= z cos(x y z )−x y z 2 sen(x y z ),
∂ 2f
∂y∂z = x cos(x y z )−x2 yzs en(x y z ),
∂ 2f
∂z∂x = y cos(x y z )−x y2 z sen(x y z ),
∂ 2f
∂z∂y = x cos(x y z )−x2 yzs en(x y z ).
[3] Equação de Laplace: Seja u = u(x, y) uma função duas vezes diferenciá-vel num conjunto aberto do plano. A equação de Laplace é:
∂ 2u
∂x2 +
∂ 2u
∂y2 = 0.
A equação de Laplace está associada a fenômenos estacionários, isto é, in-dependentes do tempo, como por exemplo potenciais eletrostáticos. As so-luções desta equação são chamadas funções harmônicas. A função u(x, y) =sen(x) ey é harmônica. De fato:
∂ 2u
∂x2 = −sen(x) ey e
∂ 2u
∂y2 = sen(x) ey.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 147/407
6.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 147
0 2 4 6 8
1
2
3
4
5
6
Figura 6.17: Curvas de nível da função u(x, y) = sen(x) ey.
[4] Equação da onda: Seja u = u(x, t) uma função duas vezes diferenciávelnum conjunto aberto do plano. A equação homogênea da onda é:
∂ 2u
∂t2
= c2 ∂ 2u
∂x2
,
onde c > 0 (c é chamada a velocidade de propagação da onda). u(x, t)descreve o deslocamento vertical de uma corda vibrante. A função :
u(x, t) = (x + c t)n + (x − c t)m, n, m ∈ N
satisfaz à equação da onda. De fato.
∂ 2u
∂x2 = m (m − 1) (x − c t)m−2 + n (n − 1) (x + c t)n−2,
∂ 2u
∂t2 = c
2
(m (m − 1) (x − c t)
m
−2
+ n (n − 1) (x + c t)
n
−2
).
Figura 6.18: Gráfico de z = u(x, t) para c = 16, n = m = 3.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 148/407
148 CAPÍTULO 6. DERIVADAS PARCIAIS
Analogamente, a função:
u(x, t) = sen(x + c t) + cos(x − c t)
2 satisfaz à equação da onda. De fato.
∂ 2u
∂x2 = −1
2 (sen(x + c t) + cos(x − c t)),
∂ 2
u∂t2
= −c2
2 (sen(x + c t) + cos(x − c t)).
Figura 6.19: Gráfico de z = u(x, t) para c = 2.
Definição 6.10. A função f : A −→ R é de classe C 2 quando existem as de-rivadas parciais até a segunda ordem em todos os pontos de A e as funções
∂
∂x j
∂f
∂xi
: A ⊂ Rn → R
são contínuas, para todo i, j.
Notamos que nos exemplos estudados sempre verificamos que:
∂
∂x j
∂f
∂xi
=
∂
∂xi
∂f
∂x j
.
Isto é consequencia do seguinte teorema.
Teorema 6.3. (Schwarz) Se f : A ⊂ Rn −→ R é uma função de classe C 2 noponto x0 ∈ A, então para todo i, j = 1.....n tem-se:
∂
∂x j
∂f
∂xi(x0)
= ∂
∂xi
∂f
∂x j(x0)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 149/407
6.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 149
Para a prova veja o apêndice.
Exemplos 6.3.
Consideremos a função: f (x, y) =
x y (x2 − y2)
x2 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
Figura 6.20: Gráfico de f .
Se (x, y) = (0, 0), f (x, y) possui derivadas parciais de todas as ordens; em(0, 0) as derivadas parciais de f (x, y) existem e são todas nulas:
∂f
∂x =
y (x4 − y4 + 4x2y2)
(x2 + y2)2 e
∂f
∂y =
x (x4 − y4 − 4x2y2)
(x2 + y2)2 .
Para todo y
= 0, f (0, y) = 0, ∂f
∂x (0, y) =
−y, ∂f
∂y (0, y) = 0 e:
∂ 2f
∂x∂y(0, y) = −1,
∂ 2f
∂y∂x(0, y) = 0.
Logo, a função não é de classe C 2.
Observações 6.5.
1. Em geral, as funções "bem comportadas", como as polinomiais, expo-nenciais e a maioria das funções utilizadas neste livro são de classeC 2.
2. A seguir apresentamos os gráficos e as curvas de nível da função declasse C 2:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 150/407
150 CAPÍTULO 6. DERIVADAS PARCIAIS
f (x, y) = (x2 − y2) e−(x2+y2)
2
e de suas derivadas parciais de primeira e segunda ordem mistas, res-pectivamente:
Figura 6.21: Gráficos de f e ∂f ∂x
, respectivamente.
Figura 6.22: Gráficos de ∂f ∂y
e ∂ 2f ∂x∂y
, respectivamente.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 151/407
6.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 151
2 1 0 1 2
2
1
0
1
2
2 1 0 1 2
2
1
0
1
2
Figura 6.23: Curvas de diversos níveis de f e ∂f ∂x
, respectivamente.
2 1 0 1 2
2
1
0
1
2
2 1 0 1 2
2
1
0
1
2
Figura 6.24: Curvas de diversos níveis de ∂f ∂y
e ∂ 2f ∂x∂y
, respectivamente.
O teorema de Schwarz também é valido para derivadas mistas de ordemsuperior a dois. De fato, se as terceiras derivadas de f são contínuas (f declasse C 3), temos:
∂ 3f
∂x∂x∂y =
∂
∂x
∂ 2f
∂x∂y
=
∂
∂x
∂ 2f
∂y∂x
=
∂ 3f
∂x∂y∂x.
Por outro lado, fazendo g = ∂f ∂x
:
∂ 3f
∂x∂y∂x =
∂ 2g
∂x∂y =
∂ 2g
∂y∂x =
∂ 3f
∂y∂x∂x.
Fica como exercício determinar as outras igualdades. Em geral, f é de classe
C k (k ≥ 1), no conjunto aberto A se as derivadas parciais até ordem k exis-tem e são contínuas em A. f e de classe C ∞ se é de classe C k para todok ≥ 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 152/407
152 CAPÍTULO 6. DERIVADAS PARCIAIS
6.8 Regra da Cadeia
Teorema 6.4. Se n = 2, z = f (x, y) é uma função de classe C 1, x = x(r, s) ey = y(r, s) são funções tais que suas derivadas parciais existem, então:
∂z
∂r
= ∂z
∂x
∂x
∂r
+ ∂ z
∂y
∂y
∂r
e ∂z
∂s
= ∂z
∂x
∂x
∂s
+ ∂ z
∂y
∂y
∂s
r
x
z
y
rs s
Figura 6.25: A regra da cadeia para n = 2.
Em particular, se x = x(t) e y = y(t) são deriváveis, então:
dz
dt =
∂z
∂x
dx
dt +
∂z
∂y
dy
dt
x
z
y
t
Figura 6.26: Caso particular da regra da cadeia para n = 2.
Se n = 3, w = f (x,y,z ) é uma função de classe C 1, x = x(r,s,t), y = y(r,s,t)e z = z (r,s,t) são tais que as derivadas parciais existem, então:
∂w
∂r =
∂w
∂x
∂x
∂r +
∂w
∂y
∂y
∂r +
∂w
∂z
∂z
∂r,
∂w
∂s =
∂w
∂x
∂x
∂s +
∂w
∂y
∂y
∂s +
∂w
∂z
∂z
∂s
e
∂w
∂t =
∂w
∂x
∂x
∂t +
∂ w
∂y
∂y
∂t +
∂ w
∂z
∂z
∂t

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 153/407
6.8. REGRA DA CADEIA 153
x
w
y z
r r s t r s tts
Figura 6.27: A regra da cadeia para n = 3.
Em particular, se x = x(t), y = y(t) e z = z (t) são deriváveis, então:
x y
t
z
w
Figura 6.28: Caso particular da regra da cadeia para n = 3.
dw
dt =
∂w
∂x
dx
dt +
∂ w
∂y
dy
dt +
∂ w
∂z
dz
dt
Exemplos 6.11.
[1] Calcule dw
dt se w = f (x,y,z ) = x y z onde x = x(t) = t2, y = y(t) = t e
z = z (t) = t4.
dw
dt =
∂w
∂x
dx
dt +
∂ w
∂y
dy
dt +
∂w
∂z
dz
dt,
∂w
∂x = y z = t × t4 = t5,
∂w
∂y = x z = t2 × t4 = t6 e
∂w
∂z = x y = t2 × t = t3. Por
outro lado, temos que dx
dt = 2 t,
dy
dt = 1 e S
dz
dt = 4 t3; então;
dw
dt = 2 t6 + t6 + 4 t6 = 7 t6.
Observe que podemos obter o mesmo resultado fazendo a composição das
funções:
w = f (t2, t , t4) = t2 × t × t4 = t7, então dw
dt = 7 t6.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 154/407
154 CAPÍTULO 6. DERIVADAS PARCIAIS
Pode explicar por que isto ocorre?
[2] Seja w = f (x,y,z ) = x2 + y2 + 2 z 2, se:
x(ρ,α,θ) = ρsen(α) cos(θ),
y(ρ,α,θ) = ρsen(α) sen(θ) e
z (ρ,α,θ) = ρ cos(α).
Calcule ∂w
∂ρ, ∂w
∂α e
∂w
∂θ .
∂w
∂ρ =
∂w
∂x
∂x
∂ρ +
∂w
∂y
∂y
∂ρ +
∂w
∂z
∂z
∂ρ =
= 2 xsen(α) cos(θ) + 2 ysen(α) sen(θ) + 4 z cos(α);
logo, utilizando a definição das funções x, y e z temos:
∂w
∂ρ = 2 ρsen2(α)
cos2(θ) + sen2(θ)
+ 4 ρcos2(α) = 2 ρ + 2 ρcos2(α).
Como antes, se fazemos w = f (ρ,α,θ) = ρ2 + ρ2cos2(α), obtemos:
∂w
∂ρ = 2 ρ + 2 ρcos2(α),
∂w
∂α = −2 ρ2cos(α) sen(α) e
∂w
∂θ = 0.
[3] Em um instante dado, o comprimento de um lado de um triângulo re-tângulo é 10 cm e cresce à razão de 1 cm/seg; o comprimento do outro lado é
12 cm e decresce à razão de 2 cm/seg. Calcule a razão de variação da medidado ângulo agudo oposto ao lado de 12 cm, medido em radianos, no instantedado.
x
y
θ
Figura 6.29: Exemplo [3].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 155/407
6.8. REGRA DA CADEIA 155
Sejam x = x(t) e y = y(t) os lados no instante t e θ = arctg
yx
o ângulo em
questão; pela regra da cadeia:
dθ
dt =
∂θ
∂x
dx
dt +
∂θ
∂y
dy
dt = − y
x2 + y2
dx
dt +
x
x2 + y2
dy
dt;
temos x = 10,
dx
dt = 1; y = 12,
dy
dt = −2, pois y decresce. Substituindoestes valores na expressão anterior
dθ
dt = − 8
61; logo, decresce à razão de
8
61 rad/seg.
[4] A resistência R, em Ohms, de um circuito é dada por R = E
I , onde I é
a corrente em ampères e E é a força eletromotriz, em volts. Num certo ins-tante, quando E = 120 volts e I = 15 ampères, E aumenta numa velocidadede 0.1 volts/seg e I diminui à velocidade de 0.05 ampères/seg. Determinea taxa de variação instantânea de R.
Como R = R(E, I ) = E I . Sejam E = E (t) a força eletromotriz no instante t
e I = I (t) a corrente no instante t. Pela regra da cadeia:
dR
dt =
∂R
∂E
dE
dt +
∂ R
∂I
dI
dt =
1
I
dE
dt +− E
I 2 dI
dt.
Temos E = 120, dE
dt = 0.1, I = 15,
dI
dt = −0.05, pois I decresce. Substituindo
estes valores na expressão anterior:
dR
dt =
1
30 Ohm/seg.
[5] A lei de um gás ideal confinado é P V = k T , onde P é a pressão, V éo volume, T é a temperatura e k > 0 constante. O gás está sendo aquecidoà razão de 2 graus/min e a pressão aumenta à razão de 0.5 kg/min. Se emcerto instante, a temperatura é de 200 graus e a pressão é de 10 kg/cm2, achea razão com que varia o volume para k = 8.
Escrevemos o volume do gás em função da pressão e da temperatura:
V (P, T ) = 8 T
P = 8 T P −1.
Sejam P = P (t) a pressão do gás no instante t e T = T (t) a temperatura do
gás no instante t. Pela regra da cadeia e usando que dT
dt = 2 e
dP
dt = 0.5:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 156/407
156 CAPÍTULO 6. DERIVADAS PARCIAIS
dV
dt =
∂V
∂T
dT
dt +
∂ V
∂P
dP
dt =
4
P (4 − T
P ).
Como T = 200 e P = 10, substituindo estes valores na expressão anterior:
dV
dt
=
−
32
5
cm3/min.
O volume decresce à razão de 32
5 cm3/min.
[6] De um funil cônico escoa água à razão de 18 πcm3/seg. Se a geratrizfaz com o eixo do cone um ângulo α = π
3, determine a velocidade com que
baixa o nível de água no funil, no momento em que o raio da base do volumelíquido é igual a 6 cm.
r
h
α
Figura 6.30: Funil.
Sejam r = r(t) o raio do cone no instante t, h = h(t) a altura do cone no
instante t. O volume do cone é V (r, h) = r2hπ
3 . Devemos calcular
dh
dt.
dV dt
= ∂V ∂r
drdt
+ ∂V ∂h
dhdt
= π3
2rh dr
dt + r2 dh
dt
;
sabemos que:dV
dt = 18π e tg(α) = r/h, logo r = h tg(π/3) =
√ 3 h e
dr
dt =
√ 3
dh
dt e:
18 π = π
3
2rh
dr
dt + r2
dh
dt
= π r2
dh
dt.
Logo, temos dh
dt =
18
r2 =
1
2 cm/seg.
[7] Suponha que z = f b x2
2 − a y3
3
é diferenciável, a, b ∈ R. Então, f satis-
faz à equação:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 157/407
6.8. REGRA DA CADEIA 157
a y2 ∂z
∂x + b x
∂z
∂y = 0.
De fato, seja u = b x2
2 − a y3
3 ; então, z = f (u). Pela regra da cadeia:
∂z
∂x = dz
du
∂u
∂x = f ′(u) b x e ∂z
∂y = dz
du
∂u
∂y = −f ′(u) a y2;
logo, a y2 ∂z
∂x + b x
∂z
∂y = f ′(u) (a b x y2 − a b x y2) = 0.
[8] Equação da onda: Seja u = u(x, t) de classe C 2. A equação homogêneada onda é dada por:
∂ 2u
∂t2 = c2
∂ 2u
∂x2,
A solução (chamada de d’Alambert) desta equação é dada por:
u(x, t) = f (x + c t) + g(x − c t),
onde f e g são funções reais de uma variável duas vezes diferenciáveis. Defato, pela regra da cadeia:
∂ 2u
∂x2 = f ′′(x + c t) + g′′(x − c t) e
∂ 2u
∂t2 = c2 (f ′′(x + c t) + g′′(x − c t)),
ou seja:
∂ 2u
∂t2 = c2
∂ 2u
∂x2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 158/407
158 CAPÍTULO 6. DERIVADAS PARCIAIS
6.9 Exercícios
1. Calcule as derivadas parciais das seguintes funções:
(a) z = x2 y − x y2
(b) z = x3 y3
(c) z = x2 y3 − 3 x4 y4
(d) z = arctg(x2 + y)
(e) z = sec(x2 y)
(f) z = senh(√
x y)
(g) z = x y
x + y
(h) z = x − y
x + y
(i) z =
1 x2 + y2
(j) z = tg( 4
y
x)
(k) z = arcsec( x
y3)
(l) z = cos(x y4)
(m) w = x y z + z sen(x y z )
(n) w = exyz2
(o) w = x + y + z x2 + y2 + z 2
(p) w = arctg(x + y + z )
(q) w = arcsec(x y z )
(r) w = argsenh(x y z )
(s) w = x2 y3 z 4
(t) w = cos(x y + z x)
(u) w = 6√
x y z
(v) w = ln(x2
y3
z 4
)
(w) w = x y + z x
1 + x2 + y3 z 4
(x) w = sen(ln(x y z 2))
(y) w = ex2 y3 z4
(z) w = cos(ln(x y z 2))
2. Seja ∂w
∂x +
∂ w
∂y +
∂ w
∂z = 0. Verifique se as seguintes funções satisfazem
à equação:(a) w = ex−y +cos(y−z )+
√ z − x
(b) w = sen(ex + ey + ez)
(c) w = ln(ex + ey + ez)
(d) w = cos(x2 + y2 + z 2)
3. Ligando-se em paralelo n resitências R1, R2, ........, Rn a resistência to-tal R é dada por
1
R =
n
i=1
1
Ri.
Verifique que: ∂R
∂Ri= R
Ri
2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 159/407
6.9. EXERCÍCIOS 159
4. Determine a equação do plano tangente ao gráfico da função f noponto P se:
(a) z = x2 + y, P = (1, 1, f (1, 1)).
(b) z = x2 − y2, P = (0, 0, 0).
(c) z = x2
+ 4 y2
, P = (2, 1, f (2, 1)).(d) z = x2 y + y3, P = (−1, 2, f (−1, 2)). .
(e) z = x
x2 + y2, P = (3, −4, f (3, −4)).
(f) z = sen(x y), P = (1, π, 0).
(g) z = x2 + 4 y2
5 , P = (3, −2, 5).
(h) z = 4 − x y
x + y , P = (2, 2, f (2, 2)).
(i) z = x ex2
−y2
, P = (2, 2, f (2, 2)).(j) z = 3 x3 y − x y, P = (1, −1, f (1, −1)).
(k) z = 1
x y, P = (1, 1, f (1, 1)).
(l) z = cos(x) sen(y), P = (0, π
2, f (0,
π
2)).
5. Determine o plano tangente ao gráfico de z = x y que passa pelospontos (1, 1, 2) e (−1, 1, 1).
6. Determine o plano tangente ao gráfico de z = x2 + y2 que seja paraleloao plano z − 2 x − y = 0.
7. Verifique que o plano tangente ao gráfico de z = x2 − y2 na origemintersecta o gráfico segundo duas retas.
8. Determine a linearização das seguintes funções, ao redor dos pontosdados:
(a) f (x, y) = sen(x y), (0, 1).
(b) f (x,y,z ) = 4
x2 + y2 + z 2, (1, 0, 0).
(c) f (x,y,z ) = x y z , (1, 1, 1).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 160/407
160 CAPÍTULO 6. DERIVADAS PARCIAIS
(d) f (x,y,z ) = (x y)z, (12, 10, 1).
(e) f (x,y,z ) = x y3 + cos(π z ), (1, 3, 1)
(f) f (x,y,z ) = x2 − y2 − z 2 + x y z , (1, 1, 0)
9. Calcule, aproximadamente:
(a) 4√ 1.00222 + 0.00232 + 0.000982.
(b) 0.98 × 0.99 × 1.02.
(c) 3.001 × (2.0023)3 × cos((1.002) π).
(d) (12.03 × 10.04)1.08.
(e) 8.99 × √ 9.99 − 1.013
(f) 1.0023 × 2.99313 + cos(1.00012π).
10. Calcule as derivadas parciais de segunda e terceira ordem de:
(a) z = x3 y − 2 x2 y2 + 5 x y − 2 x
(b) z = x cos(x y) − y sen(x y)
(c) z = cos(x3 + x y)
(d) z = arctg(x2 − 2 x y)
(e) z = ex2+y2
(f) w = x2y3 z 4
(g) w = cos(x + y + z )
(h) w = x3 y2 z + 2 (x + y + z )
(i) w = x3 − y3
x2 + y3
(j) w = exyz
(k) w = log4(x2 + y z + x y z )
(l) w = exy2z3
11. Verifique que as funções dadas satisfazem à equação de Laplace:
∂ 2f
∂x2 +
∂ 2f
∂y2 = 0.
(a) f (x, y) = e−x cos(y).
(b) f (x, y) = ln(
x2 + y2).(c) f (x, y) = arctgy
x
, x > 0.
12. Verifique que as funções dadas satisfazem à equação de Laplace emdimensão 3:
∂ 2f
∂x2 +
∂ 2f
∂y2 +
∂ 2f
∂z 2 = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 161/407
6.9. EXERCÍCIOS 161
(a) f (x,y,z ) = x2 + y2 − 2 z 2. (b) f (x,y,z ) = e3x+4ycos(5z ).
13. Usando a regra da cadeia para z = f (x, y) e w = f (x,y,z ), calcule dz
dt
e dw
dt :
(a) z = x2 + 2y2, x = sen(t), , y = cos(t)
(b) z = arctg(y
x), x = ln(t), y = et
(c) z = tg(x
y), x = t, y = et
(d) z = exy , x = 3t + 1, y = t2
(e) z = x2cos(y) − x, x = t2, y = 1t
(f) z = ln(x) + ln(y) + xy, x = et, y = e−t
(g) w = xyz , x = t2, y = t3, z = t4
(h) w = e−xy2sen(z ), x = t, y = 2t, z = 3t
(i) w = x2 + y2 + z 2, x = et, y = etcos(t), z = etsen(t)
(j) w = x2 + y2
1 + x2 + y2 + z 2, x = cos(t), y = sen(t), z = et
(k) w = x + y + z
x2 + y2 + z 2, x = cos(t), y = sen(t), z = et
(l) w = (x2 − y2) ln(
z 3
x2
−y2
), x = cosh(t), y = senh(t), z = t
14. Usando a regra da cadeia para z = f (x, y) e w = f (x,y,z ), calcule:
∂z
∂t, ∂z
∂s e
∂w
∂t ,
∂w
∂s e
∂w
∂r .
(a) z = x2 − y2, x = 3t − s, y = t + 2s
(b) z = ey
x , x = 2scos(t), y = 4ssen(t)
(c) z = x2 + y2, x = cosh(s) cos(t), y = senh(s) sen(t)
(d) z = x2y−2, x = s2 − t, y = 2st
(e) z = cosh(y
x), x = 3t2s, y = 6tes

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 162/407
162 CAPÍTULO 6. DERIVADAS PARCIAIS
(f) ) z =
1 + x2 + y2, x = set, y = se−t
(g) z = arcsen(3x + y), x = s2, y = sen(st)
(h) w = xey, x = arctg(rst), y = ln(3rs + 5st)
(i) w = x2 + y2 + z 2, x = rcos(s), y = rsen(t)sen(s), z = rcos(t)
(j) w = x2 + y2 + z 2, x = tg(t), y = cos(r), z = sen(s)
(k) w = xy + yz + zx, x = tr, y = st, z = ts
(l) w = log5(xy + yz + zx), x = t2r, y = st2, z = t2s
15. Se o raio r e a altura h de um tanque cônico decrescem à razão de0.3 cm/h e 0.5 cm/h respectivamente, determine a razão de decresci-mento do volume do tanque quando r = 6 cm e h = 30 cm.
16. Num certo instante, a altura de um cone é 30 cm eoraiodabaseé 20 cm
e cresce à razão de 1 cm/seg. Qual é a velocidade com que a altura au-menta no instante em que o volume cresce à razão de 20003 π cm3/seg?
17. Considere a lei de um gás ideal confinado, para k = 10. Determinea taxa de variação da temperatura no instante em que o volume dogás é de 120 cm3 e o gás está sob pressão de 8 din/cm2, sabendo queo volume cresce à razão de 2 cm3/seg e a pressão decresce à razão de0.1 din/cm2.
18. Se z = f (x, y) é diferenciável, x = rcos(θ) e y = rsen(θ), verifique:
∂z
∂x =
∂z
∂rcos(θ) − ∂z
∂θ
sen(θ)
r e
∂z
∂y =
∂z
∂rsen(θ) +
∂ z
∂θ
cos(θ)
r .
19. Sejam f (x, y) e g(x, y) funções diferenciáveis tais que:
∂f
∂x =
∂g
∂y e
∂f
∂y = −∂g
∂x.
Se x = rcos(θ), y = rsen(θ) verifique que:
∂f
∂r =
1
r
∂g
∂θ e
∂g
∂r = −1
r
∂f
∂θ.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 163/407
6.9. EXERCÍCIOS 163
20. Verifique que se w = f (x,y,z ) é diferenciável e homogênea de grau n,então:
x ∂f
∂x + y
∂f
∂y + z
∂f
∂z = nf (x,y,z ).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 164/407
164 CAPÍTULO 6. DERIVADAS PARCIAIS

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 165/407
Capítulo 7
DERIVADA DIRECIONAL
7.1 Introdução
Suponha que estamos numa ladeira de uma montanha e desejamos deter-minar a inclinação da montanha na direção do eixo dos z . Se a montanhafosse representada pelo gráfico da função z = f (x, y), então, já saberíamosdeterminar a inclinação em duas direções diferentes, a saber, na direção do
eixo dos x utilizando ∂f
∂x(x, y) e na direção do eixo dos y utilizando
∂f
∂y(x, y).
Neste parágrafo veremos como utilizar derivada para determinar a incli-nação em qualquer direção; para isto definimos um novo tipo de derivadachamada direcional. Este conceito generaliza o de derivada parcial, isto é,as derivadas parciais de uma função podem ser obtidas como casos particu-lares das derivadas direcionais.
Definição 7.1. Sejam A ⊂ Rn aberto, f : A ⊂ Rn −→ R uma função, x ∈ Ae v um vetor unitário em Rn. A derivada direcional de f no ponto x e nadireção v é denotada por:
∂f
∂ v(x)
e definida por:
∂f
∂ v(x) = lim
t−→0
f (x + t v) − f (x)
t ,
se o limite existe.
165

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 166/407
166 CAPÍTULO 7. DERIVADA DIRECIONAL
Observações 7.1.
1. Se n = 3, A ⊂ R3 aberto, f : A ⊂ R3 −→ R uma função, x = (x,y,z ) ∈A e v = (v1, v2, v3) um vetor unitário em R3.
2. A derivada direcional de f no ponto (x,y,z ) e na direção v é denotada
por: ∂f ∂ v
(x,y,z ) e definida por:
∂f
∂ v(x,y,z ) = lim
t−→0
f (x + t v1, y + t v2, z + t v3) − f (x,y,z )
t
se o limite existe.
3. Analogamente para n = 2:
∂f
∂ v(x, y) = lim
t−→0
f (x + t v1, y + t v2) − f (x, y)
t
se o limite existe.
Exemplos 7.1.
[1] A função:
f (x, y) =
x2 y
x4 + y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0),
não é contínua na origem. No entanto, as derivadas direcionais no ponto(0, 0) e em qualquer direção v = (v1, v2) existem.
De fato:
f
(0, 0) + t (v1, v2)− f (0, 0) = f
t v1, t v2
=
t v21 v2
t2 v41 + v2
2 ;
então:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 167/407

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 168/407
168 CAPÍTULO 7. DERIVADA DIRECIONAL
A derivada direcional é a generalização natural das derivadas parciais. Defato, se v = e1 = (1, 0, 0), então, a derivada direcional de f na direção v é aderivada parcial de f em relação a x:
∂f
∂ e1(x,y,z ) = lim
t→0
f (x + t, y,z ) − f (x,y,z )
t =
∂f
∂x(x,y,z ).
Analogamente se v = e2 = (0, 1, 0) e v = e3 = (0, 0, 1):∂f
∂ e2(x,y,z ) =
∂f
∂y(x,y,z ) e
∂f
∂ e3(x,y,z ) =
∂f
∂z (x,y,z ).
A definição para n = 2 é análoga.
Observações 7.2.
1. Notemos que na definição de derivada direcional o vetor v deve serunitário. A razão disto é a seguinte: se o vetor não fosse unitário, aderivada direcional não dependeria somente do ponto e da direção,mas também do comprimento do vetor.
2. Para n = 2, v determina a direção do plano secante que intersecta ográfico de f .
Figura 7.1:
3. Pode acontecer que a derivada direcional de uma função num pontonuma certa direção exista e a derivada direcional da mesma função nomesmo ponto em outra direção não exista.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 169/407
7.2. DERIVADA DIRECIONAL COMO TAXA DE VARIAÇÃO 169
7.2 Derivada Direcional como Taxa de Variação
De forma análoga ao que ocorre com as derivadas parciais, a derivada dire-cional de f no ponto x ∈ A na direção v exprime a taxa de variação de f aolongo da reta:
c(t) = x + t vou, equivalentemente, a taxa de variação de f em relação à distância, noplano xy, na direção v.
y0
y0 +t
x0 x
0+t
Ae
e
2
1
v
c(t)
Figura 7.2:
Novamente, a existência de todas as derivadas direcionais de uma funçãonum ponto não garante a continuidade da função no ponto, pois, equivalea aproximar-se do ponto por retas.
Exemplos 7.1.O potencial elétrico numa região do espaço é dado por:
V (x,y,z ) = x2 + 4 y2 + 9 z 2.
Ache a taxa de variação de V no ponto (2, −1, 3) e na direção de (2, −1, 3)para a origem.
O vetor (2, −1, 3) não é unitário; logo, v = (2, −1, 3)
(2, −1, 3) = 1√
14
2, −1, 3.
Então:
f
x + 2 t√
14, y − t√
14, z +
3 t√ 14
=
x + 2 t√
14
2+ 4
y − t√ 14
2+ 9
z + 3 t√
14
2;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 170/407
170 CAPÍTULO 7. DERIVADA DIRECIONAL
e,
f
x+ 2 t√
14, y− t√
14, z +
3 t√ 14
−f (x,y,z ) = 1
14 t
89 t+2√
14(2 x−4 y+27 z )
.
Logo, ∂f
∂ v = limt−→0
1
14
89 t + 2 √ 14(2 x − 4 y + 27 z )
=
√ 14
7 (2 x − 4 y + 27 z ).Então:
∂f
∂ v(2, −1, 3) =
89√
14
7 .
Se f é diferenciável no ponto x0, então, f possui todas as derivadas direcio-nais em x0. A recíproca é falsa. Procure exemplos.
7.3 Gradiente de uma FunçãoDefinição 7.2. Sejam A ⊂ Rn aberto, x ∈ A e f : A ⊂ Rn −→ R uma funçãotal que as derivadas parciais existem em x. O gradiente de f no ponto x éo vetor do Rn denotado por ∇f (x) e definido por:
∇f (x) = ∂f
∂x1
(x), ∂f
∂x2
(x), . . . , ∂f
∂xn
(x)
.
Observações 7.3.
1. Equivalentemente:
∇f (x) = ∂f
∂x1(x) e1 +
∂f
∂x2(x) e2 + ............ +
∂f
∂xn(x) en.
2. Se n = 3, A ⊂ R3 aberto, f : A ⊂ R3 −→ R uma função, o pontox = (x,y,z ) ∈ A o gradiente de f no ponto (x,y,z ) é definido por:
∇f (x,y,z ) =∂f
∂x(x,y,z ),
∂f
∂y(x,y,z )
∂f
∂z (x,y,z )

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 171/407
7.3. GRADIENTE DE UMA FUNÇÃO 171
3. Analogamente para n = 2:
∇f (x, y) =∂f
∂x(x, y),
∂f
∂y(x, y)
.
4. A rigor ∇f é uma função que associa a cada ponto x ∈ A ⊂ Rn umúnico vetor ∇f (x) ∈ Rn. Este tipo de função é chamado campo devetores. O nome se justifica se expressarmos graficamente ∇f do se-guinte modo: em cada ponto x ∈ A desenhamos um vetor com origemem x e com o comprimento e direção de ∇f (x).
A
Figura 7.3: O gradiente como campo de vetores.
Exemplos 7.2.
[1] Se f (x, y) = x2 + y2; então, ∇f (x, y) = (2 x, 2 y).
(x, y) ∇f (x, y) ∇f (x, y)(0, 0) (0, 0) 0(1, 0) (2, 0) 2(x, 0) (2x, 0) 2x(0, y) (0, 2y) 2y
(1, 1) (2, 2) 2√ 2(x, y) (2x, 2y) 2 (x, y)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 172/407
172 CAPÍTULO 7. DERIVADA DIRECIONAL
À medida que o ponto se afasta da origem o comprimento do gradientecresce e fica igual a duas vezes a distância do ponto à origem.
Figura 7.4: Esboço de ∇f e das curvas de nível de f .
[2] Se f (x, y) = x2
−y2; então,
∇f (x, y) = (2 x,
−2 y).
(x, y) ∇f (x, y) ∇f (x, y)(0, 0) (0, 0) 0(1, 0) (2, 0) 2(x, 0) (2x, 0) 2x(0, y) (0, −2y) 2y
(1, 1) (2, −2) 2√
2(x, y) (2x, −2y) 2 (x, y)
À medida que o ponto se afasta da origem o comprimento do gradiente
cresce ficando igual a duas vezes a distância do ponto à origem.
Figura 7.5: Esboço de ∇f e das curvas de nível de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 173/407
7.3. GRADIENTE DE UMA FUNÇÃO 173
[3] Se f (x, y) = sen(x) sen(y); então:
∇f (x, y) = (cos(x) sen(y),sen(x) cos(y)).
Figura 7.6: Esboço de ∇f e das curvas de nível de f .
[4] Se f (x,y,z ) = x2 − y2 + z 2, então:
∇f (x,y,z ) = (2 x, −2 y, 2 z )
e:
∇f (x,y,z ) = 2
x2 + y2 + z 2.
Figura 7.7: Esboço de ∇f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 174/407
174 CAPÍTULO 7. DERIVADA DIRECIONAL
Proposição 7.1. Se f é uma função de classe C 1, então:
∂f
∂ v(x) = ∇f (x) · v
Para a prova, veja o apêndice.
Se n = 2, qualquer vetor unitário v pode ser escrito na forma:
v =
cos(θ),sen(θ)
,
onde θ é o ângulo diretor de v. Logo:
∂f
∂ v(x, y) = cos(θ)
∂f
∂x(x, y) + sen(θ)
∂f
∂y(x, y)
Exemplos 7.3.
[1] Calcule as derivadas direcionais de z = f (x, y) = ln(
x2 + y2) na dire-ção do vetor (1, 1).
O ângulo formado por (1, 1) e o eixo positivo dos x é θ = π4
, logo:
∂f
∂ v(x, y) = cos(
π
4)
x
x2 + y2 + sen(
π
4)
y
x2 + y2 =
√ 2
2
x + y
x2 + y2
.
[2] Calcule as derivadas direcionais de w = f (x,y,z ) = x y z na direção dovetor (1, 2, 2).
Consideremos o vetor unitário v = (1, 2, 2)
(1, 2, 2) =1
3, 2
3, 2
3
; logo:
∂f
∂ v(x,y,z ) =
y z , x z , x y · 1
3, 2
3, 2
3
=
y z + 2 x z + 2 x y
3 .
[3] Calcule as derivadas direcionais de w = f (x,y,z ) = ex + y z na direçãodo vetor (−1, 5, −2).
O vetor (−1, 5, −2) não é unitário; logo v = 1√
30
(−1, 5, −2).
∂f
∂ v(x,y,z ) =
1√ 30
(ex, z , y) · (−1, 5, −2) = −ex + 5 z − 2 y√
30.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 175/407
7.4. OBSERVAÇÕES GEOMÉTRICAS SOBRE GRADIENTES 175
7.4 Observações Geométricas sobre Gradientes
Sejam f : A ⊂ Rn −→ R uma função diferenciável tal que ∇f = 0, v umvetor unitário e α o ângulo formado por v e ∇f . Então:
∇f
· v =
∇f
v
cos(α) =
∇f
cos(α);
como cos(α) atinge o máximo em α = 0, então:
∂f
∂ v ≤ ∇f .
Note que, se α = 0, então, ∇f e v são paralelos com a mesma direção.
Se consideramos o vetor unitário v = ∇f
∇f , então,
∂f ∂ v
= ∇f · ∇f ∇f = ∇f 2
∇f = ∇f .
Logo, temos a igualdade quando derivamos na direção de ∇f .
Proposição 7.2. Se ∇f = 0, então:
1. A taxa máxima de crescimento de f no ponto x0 ocorre na direção e nosentido do gradiente. Analogamente, a taxa mínima de crescimento de
f no ponto x0 ocorre na direção contrária a do gradiente.
2. O valor máximo de ∂f
∂ v no ponto x0 é ∇f (x0).
3. Se ∇f (x) = 0, então, ∂f
∂ v = 0 para todo v.
O gradiente de f no ponto x0 indica a direção, no plano xy (Dom(f )), demaior crescimento de f numa vizinhança do ponto x0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 176/407
176 CAPÍTULO 7. DERIVADA DIRECIONAL
Figura 7.8:
Exemplos 7.4.
[1] Se:
T (x, y) = 100 x y
x2 + 4 y2 + 4
é a temperatura em graus Celsius, sobre uma lâmina metálica, x e y medidosem cm, determine a direção de crescimento máximo de T a partir do ponto(1, 1) e a taxa máxima de crescimento de T , nesse ponto.
Pela proposição anterior, no ponto (1, 1), a função cresce mais rapidamente
na direção de ∇T (1, 1) e a taxa máxima de crescimento nesta direção é∇T (1, 1).
∇T (x, y) = 100
(4 + x2 + 4 y2)2
y (4 − x2 + 4 y2), x (4 + x2 − 4 y2)
;
∇T (1, 1) = 100
92
7, 1
e ∇T (1, 1) = 500
√ 2
92∼= 8.729o por centímetro.
A solução apresentada pode ser enganosa, pois, apesar de o gradiente apon-
tar na direção de maior crescimento da temperatura, não necessariamenteindica o lugar mais quente da lâmina, isto é, o gradiente nos dá uma solu-ção num pequeno aberto ao redor do ponto (1, 1); se mudamos este ponto

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 177/407
7.4. OBSERVAÇÕES GEOMÉTRICAS SOBRE GRADIENTES 177
a direção de maior crescimento muda. Desenhos do gradiente ao redor doponto (1, 1) numa região do plano, respectivamente:
0.5 1 1.5 2
0.5
1
1.5
2
0 0.5 1 1.5 2
0
0.5
1
1.5
2
Figura 7.9:
[2] Suponha que o potencial numa lâmina plana é dado por:
V (x, y) = 80 − 20 x e−x2+y2
20
em volts, x e y em cm.
(a) Determine a taxa de variação do potencial em qualquer direção paralelaao eixo dos x.
(b) Determine a taxa de variação do potencial em qualquer direção paralelaao eixo dos y.
(c) Determine a taxa de variação do potencial na direção do vetor (1, 1).
(d) Qual é a taxa máxima de variação do potencial no ponto (1, 2)?(e) Em que direção, a partir da origem, o potencial aumenta e diminui?
(a) Qualquer direção paralela ao eixo dos x é dada pelo vetor v = (1, 0);logo:
∂V
∂ v(x, y) =
∂V
∂ x(x, y) = 2 (x2 − 10) e−
x2+y2
20 .
(b) Analogamente, qualquer direção paralela ao eixo dos y é dada pelo vetorv = (0, 1); logo:
∂V ∂ v (x, y) = ∂V ∂ y (x, y) = 2 x y e−x2+y2
20 .
(c) O vetor (1, 1) não é unitário; normalizando o vetor obtemos:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 178/407
178 CAPÍTULO 7. DERIVADA DIRECIONAL
v =
√ 2
2 (1, 1)
e calculamos:
∂V
∂ v(x, y) =
∇V (x, y)
·v.
Então:
∇V (x, y) =
∂V
∂ x(x, y),
∂V
∂ y(x, y)
= 2 e−
x2+y2
20 (x2 − 10, x y);
∂V
∂ v(x, y) =
√ 2 ∇V (x, y) · (1, 1) =
√ 2 e−
x2+y2
20 (x2 + x y − 10).
(d) A taxa máxima do potencial no ponto (1, 2) é
∇V (1, 2)
.
∇V (x, y) = 2 e−x2−y2
20
100 + x4 + x2 (y2 − 20);
logo:
∇V (1, 2) = 2
√ 85
4√
e volts.
(e) A direção do gradiente é aquela onde o potencial cresce mais rapida-mente. Logo, temos que ∇V (0, 0) = (−20, 0). A partir da origem o potencialcresce mais rapidamente na direção do vetor (−20, 0) e decresce mais rapi-
damente na direção do vetor −∇V (0, 0) = (20, 0). Veja o seguinte desenho:
Figura 7.10: Exemplo [3].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 179/407
7.4. OBSERVAÇÕES GEOMÉTRICAS SOBRE GRADIENTES 179
[3] A temperatura do ar em certa altitude é dada por:
f (x,y,z ) = x y2 z 3 + x2 y z 3 + x2 y3 z.
Um avião está localizado no ponto (−1, 2, 1). Em que direção deve voar paraque o motor resfrie o mais rapidamente possível?
De todas as direções possíveis, a direção do gradiente é aquela onde a fun-ção cresce mais rapidamente. Logo, o avião deverá voar na direção contráriaa do gradiente.
∂f
∂x(x, y) = y z (2 x y2 + 2 x z 2 + y z 2),
∂f
∂y(x, y) = x z (3 x y2 + x z 2 + 2 y z 2),
frac∂f∂z (x, y) = x y (x y2 + 3 x z 2 + 3 y z 2),
e:
∇f (−1, 2, 1) = (−16, 9, 2).
O avião deverá voar na direção de (16, −9, −2).
[4] Uma lâmina metálica está situada no plano xy de modo que a tempe-
ratura T = T (x, y), em graus Celsius, em cada ponto, seja proporcional àdistância do ponto à origem. Se a temperatura no ponto (3, 4) é de 150oC ,pede-se:
(a) Ache a taxa de variação de T no ponto (3, 4) na direção (−1, 1).
(b) Em que direções a taxa de variação é zero?
Note que T (x, y) = k
x2 + y2; então, 150 = T (3, 4) = 5 k; logo k = 30 e:
T (x, y) = 30 x2 + y2 e o gradiente ∇
T (x, y) = 30
x2 + y2
(x, y).
Logo, ∇T (3, 4) = 6 (3, 4). Esboço de ∇f :

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 180/407
180 CAPÍTULO 7. DERIVADA DIRECIONAL
Figura 7.11: Exemplo [4].
(a) (−1, 1) não é unitário; logo, v =− 1√
2,
1√ 2
; então,
∂T ∂ v
(3, 4) = ∇T (3, 4) · v = 3 √ 2.
(b) Seja v = (a, b) tal que a2 + b2 = 1; ∂T
∂ v(3, 4) = 0 se (3, 4) · (a, b) = 0; logo,
obtemos o seguinte sistema:
a2 + b2 = 1
3 a + 4 b = 0,
com solução a = ±4
5 e b = ∓3
5. As direções solicitadas são (4, −3) e (−4, 3).
[5] A equação da superfície de uma montanha é:
z = f (x, y) = 1200 − 3 x2 − 2 y2,
onde as distâncias são medidas em metros. Suponha que os pontos do eixopositivo dos x estão a leste e os pontos do eixo positivo dos y ao norte e queum alpinista está no ponto (−10, 5, 850).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 181/407
7.4. OBSERVAÇÕES GEOMÉTRICAS SOBRE GRADIENTES 181
Figura 7.12: Exemplo [5].
(a) Qual é a direção da parte que tem a inclinação mais acentuada?
(b) Se o alpinista se mover na direção leste, ele estará subindo ou descendoe qual será sua velocidade?
(c) Se o alpinista se mover na direção sudoeste, ele estará subindo ou des-cendo e qual será sua velocidade?
(d) Em que direção ele estará percorrendo um caminho plano?
Sabemos que ∂f
∂ v atinge o máximo valor se:
v = ∇f (x, y)
∇f (x, y) e ∂f
∂ v = ∇f (x, y).
(a) ∇f (x, y) = (−6 x, −4 y) e ∇f (−10, 5) = (60, −20). A direção da parte que
tem a inclinação mais acentuada é (3, −1).
Figura 7.13: Esboço de ∇f e das curvas de nível de f

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 182/407
182 CAPÍTULO 7. DERIVADA DIRECIONAL
Um vetor unitário no plano se escreve v = (cos(α),sen(α)), onde α é o ân-gulo formado pelo vetor e o eixo dos x.
(b) O vetor unitário na direção leste é v = (cos(0),sen(0)) = (1, 0); veja odesenho:
L
N
O
Figura 7.14:
∂f ∂ v
(−10, 5) = ∂f ∂x
(−10, 5) = 60.
O alpinista estará subindo a uma razão de 60 m/min.
(c) O vetor na direção sudoeste é (−1, −1); logo, o vetor unitário nesta dire-
ção é dado por: v = (−√
2
2 , −
√ 2
2 ); veja o desenho:
O
S
Figura 7.15:
∂f
∂ v(−10, 5) = ∇f (−10, 5) · v = −20
√ 2.
O alpinista estará descendo a uma razão de 20 √ 2 m/min.
(d) Seja v = (cos(α),sen(α)) vetor unitário. Devemos determinar α tal que:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 183/407
7.5. FUNÇÕES IMPLÍCITAS 183
∂f
∂ v(−10, 5) = ∇f (−10, 5) · v = 0,
que é equivalente a 3 cos(α) − sen(α) = 0; logo tg(α) = 3. Utilizando aseguinte identidade trigonométrica:
sen2
(α) = tg2(α)
1 + tg2(α) ,
obtemos sen(α) = ±3√
10
10 e cos(α) =
1 − sen2(α) = ±√
10
10 . O alpinista
estará percorrendo um caminho plano na direção de (1, 3) ou de (−1, −3).
7.5 Funções Implícitas
Sejam A ⊂ R2 um conjunto aberto, f : A −→ R2 e c ∈ R fixado. A equaçãof (x, y) = c define y implicitamente como função de x, quando existe g :
I −→ R tal que y = g(x) e f (x, g(x)) = c. Isto significa que:
f −1(c) = {(x, y) ∈ A / f (x, y) = c}é o gráfico de g.
Em geral uma equação do tipo f (x, y) = c quando define y em função dex o faz apenas localmente (ou seja numa vizinhança de um ponto). Comoveremos nos exemplos, nem sempre uma equação do tipo f (x, y) = c definealguma função implicitamente. Para isto, basta considerar c /∈ Im(f ).
Exemplos 7.5.
[1] Seja f (x, y) = x2 + y2. Se c = −1, f não define implicitamente nehumafunção. Se c = 0, então x = 0 e y = 0 e f não define implicitamente nenhumafunção definida num intervalo não degenerado. Se c = 1, f não defineimplicitamente nehuma função. Considerando x ∈ I = (−1, 1), podemosdefinir:
g1(x) =√
1 − x2 se A1 = {(x, y) ∈ R2 / y > 0},
e
g2(x) = −√ 1 − x2 se A2 = {(x, y) ∈ R2 / y < 0}.
[2] Seja f (x, y) = x y e c ∈ R; então, f define implícitamente:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 184/407
184 CAPÍTULO 7. DERIVADA DIRECIONAL
y = g(x) = c
x se x = 0.
Nosso objetivo é dar condições suficientes para que seja possível obter umafunção definida implicitamente. Exceto para as equações mais simples, por
exemplo, lineares, quadráticas, esta questão não é simples. O estudo dasfunções definidas implicitamente tem muitas aplicações não só na Matemá-tica como em outras Ciências.
[3] A lei de Gay-Loussac para gases ideais confinados: P V = k T , onde P éa pressão, V o volume e T a temperatura.
[4] O sistema:
x2 + y2 + z 2 = 1
x + y + z = 0,
estabelece uma relação entre as coordenadas de um ponto da esfera unitáriacentrada na origem.
No estudo das funções definidas implicitamente surgem dois problemas:1. Dada f (x, y) = c, f de classe C k, (k > 1), em que casos existe g definidaimplicitamente por f (x, y) = c?2. Se existe g diferenciável definida implicitamente por f (x, y) = c, como
calcular a derivada de g?
Teorema 7.1. (Função Implícita)Sejam A ⊂ R2 um conjunto aberto, f :A −→ R de classe C k e c ∈ R fixo. Se (x0, y0) ∈ A é tal que f (x0, y0) = c e∂f
∂y(x0, y0) = 0, então, existe um retângulo aberto I 1×I 2 centrado em (x0, y0)
tal que f −1(c) ∩ I 1 × I 2
é o gráfico da função g : I 1 −→ I 2 de classe C k e:
g′(x) = −∂F
∂x (x, g(x))∂F
∂y (x, g(x))
.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 185/407
7.5. FUNÇÕES IMPLÍCITAS 185
Ix
g(x)
1
I2
f=c
Figura 7.16:
O teorema da função implícita é um teorema de existência; isto é, não indicacomo determinar a função definida implícitamente. O teorema tem con-sequências geométricas profundas. Se f satisfaz às hipóteses do teorema,então f −1(c) é localmente uma curvas de classe C k. Veja [EL] na bibliografia.Nós, essencialmente, utilizaremos a fórmula para o cálculo das derivadas.
Exemplos 7.6.
[1] Se y = f (x) é definida implicitamente por ex−y + x2 − y = 1, calcule y ′.
Seja f (x, y) = ex−y +x2−y−1; f é de classe C k e ∂f
∂y(x0, y0) = −ex0−y0 −1 = 0
para todo (x0, y0) ∈ R2; então:
y′ = ex−y + 2 x
ex
−y + 1
.
[2] Se y = f (x) é definida implicitamente por x2 + y2 = 1, calcule y ′.
Seja f (x, y) = x2 + y2, f é de classe C k e ∂f
∂y(x0, y0) = −2 y0 = 0 para todo
(x0, y0) ∈ R2 tal que y0 = 0; então:
y′ = −x
y.
[3] Seja f (x, y) = (x − 2)3 y + x ey−1. Não podemos afirmar que f (x, y) = 0define implicitamente uma função de x num retângulo aberto centrado em(1, 1). De fato, f (1, 1) = 0, f é de classe C k mas:
∂f
∂y(1, 1) = (x − 2)3 + x ey−1(1,1)
= 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 186/407
186 CAPÍTULO 7. DERIVADA DIRECIONAL
0 0.5 1 1.5 2
0
0.5
1
1.5
2
Figura 7.17: Curvas de nível de f num retângulo centrado em (1, 1).
Para n > 2 o teorema da função implícita também é válido. A seguir, apres-sentamos a versão para n = 3:
Teorema 7.2. (Função Implícita) Sejam A ⊂ R3 um conjunto aberto, f :
A −→ R de classe C k
e c ∈ R fixo.Se (x0, y0, z 0) ∈ A é tal que f (x0, y0, z 0) = c e ∂f
∂z (x0, y0, z 0) = 0, então, existe
um paralelepípedo aberto I 1×I 2×I 3 centrado em (x0, y0, z 0) tal que f −1(c)∩I 1 × I 2 × I 3
é o gráfico da função g : I 1 × I 2 −→ I 3 de classe C k tal quez = g(x, y) e:
∂g
∂x = −
∂f
∂x(x , , y , g(x, y))
∂f
∂z (x,y,g(x, y))
e ∂g
∂y = −
∂f
∂y(x , , y , g(x, y))
∂f
∂z (x,y,g(x, y))
.
Novamente o teorema implica em que toda superfície de classe C k é local-mente o gráfico de alguma função de classe C k. Veja [EL] na bibliografia.
7.6 Gradiente e Conjuntos de Nível
Sabemos que ∇f aponta na direção para a qual f cresce o mais rapidamente,mas nas curvas de nível a função f permanece constante, isto é, ao andar-mos por uma curva de nível, os valores de f são constantes; logo, a derivada
direcional nessa direção será zero (sem variação):∂f
∂ v(x0) = ∇f (x0) · v = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 187/407
7.7. GRADIENTE E CURVAS DE NÍVEL 187
Em geral, considere uma função f : A ⊂ Rn −→ R diferenciável.
Proposição 7.3. Seja x0 ∈ A tal que ∇f (x0) = 0. Então ∇f (x0) é perpendi-cular ao conjunto de nível de f que passa pelo ponto x0.
Para a prova, veja o apêndice.
Então, se ∇f (x0) = 0, temos que ∇f (x0) é perpendicular a cada elementodo conjunto:
{x ∈ Dom(f ) / f (x) = f (x0)}.
Sc3
S
Sc2
c1
Figura 7.18: O gradiente perpendicular aos conjuntos de nível.
7.7 Gradiente e Curvas de NívelSeja a função f : A ⊂ R2 −→ R diferenciável e as curvas de nível c de f :
C c = {(x, y) ∈ R2/f (x, y) = c}.
Se (x0, y0) ∈ C c tal que ∇f (x0, y0) = 0. Pela proposição 7.3, segue que aequação da reta tangente à curva de nível f (x, y) = f (x0, y0) é
∇f (x0, y0) · (x − x0, y − y0) = 0
ou:
∂f
∂x(x0, y0)(x − x0) +
∂f
∂y(x0, y0)(y − y0) = 0

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 188/407
188 CAPÍTULO 7. DERIVADA DIRECIONAL
e a equação da reta normal é:
∂f
∂x(x0, y0)(y − y0) − ∂f
∂y(x0, y0)(x − x0) = 0
Exemplos 7.7.
[1] Determine as equações da reta tangente e da reta normal no ponto (x0, y0)da elipse centrada na origem.
A equação da elipse centrada na origem é x2
a2 +
y2
b2 = 1, (a, b = 0). Consi-
deremos:
f (x, y) = x2
a2 +
y2
b2 − 1;
então, ∇f (x0, y0) = 2
x0
a2, y0
b2 ; as equações das retas tangente e normal são,
respectivamente: b2 x0 x + a2 y0 y = a2 b2,
b2 x0 y − a2 y0 x = (b2 − a2) x0 y0.
Em particular, se a = b temos um círculo de raio a e as equações da retatangente e da reta normal são, respectivamente,
x0 x + y0 y = a2
x0 y − y0 x = 0.
[2] Determine a equação da reta tangente à elipse x2
16 + y2
9 = 1, que é paralelaà reta x + y = 0.
Seja f (x, y) = x2
16 +
y2
9 e g(x, y) = x + y. Pelo exercício anterior para a = 4 e
b = 3, temos:
9 x x0 + 16 y y0 = 144;
esta reta deve ser paralela à reta x + y = 0; logo, os vetores normais devemser paralelos, isto é, devemos resolver o sistema:
∇f (x0, y0) = λ∇g(x0, y0)x20
16 +
y20
9 = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 189/407
7.7. GRADIENTE E CURVAS DE NÍVEL 189
Ou, equivalentemente:
(1) x0 = 8 λ
(2) 2 y0 = 9 λ
(3) x2
0
16 +
y20
9 = 1.
Fazendo (1) = (2) e utilizando (3), temos: (x0, y0) = ±165
, 95
; logo, no
ponto16
5 ,
9
5
, temos x + y = 5 e no ponto
− 16
5 , −9
5
, temos
x + y = −5.
-4 -2 2 4
-4
-2
2
4
Figura 7.19: Exemplo [2].
[3] Determine a equação da reta normal à parábola y2 = −8 x que passa peloponto (
−5, 0).
Primeiramente, observamos que o ponto (−5, 0) não pertence à parábola.Seja:
f (x, y) = y2 + 8 x;
logo, ∇f (x, y) = 2(4, y). A equação da reta normal no ponto (x0, y0) é:
−x y0 + 4 y − 4 y0 + x0 y0 = 0.
Como esta reta deve passar por (−5, 0), temos x0 = −1 ou y0 = 0. Como oponto (x0, y0) pertence à parábola y2
0 =
−8 x0. Se y0 = 0, então a equação é:
y = 0. Se x0 = −1, então y0 = ±2 √ 2 e as equações são:
2 y −√
2 x = 5√
2 e 2 y +√
2 x = −5√
2,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 190/407
190 CAPÍTULO 7. DERIVADA DIRECIONAL
nos pontos (−1, 2√
2) e (−1, −2√
2), respectivamente.
-5 -4 -3 -2 -1
-4
-2
2
4
Figura 7.20: Exemplo [3].
7.8 Ângulo entre Curvas
Sejam as curvas de nível:
C 1 = {(x, y) ∈ R2 / F (x, y) = 0} e C 2 = {(x, y) ∈ R2 / G(x, y) = 0}
que se intersectam no ponto (x0, y0). O ângulo compreendido entre elas édefinido como o menor ângulo formado pelas retas tangentes a essas duascurvas no ponto (x0, y0), o qual é equivalente ao ângulo α formado pelas res-pectivas normais no ponto (x0, y0). Logo, se ∇F (x0, y0) = 0 e ∇G(x0, y0) = 0,temos que o ângulo α, formado por C 1 e C 2 é dado por:
cos(α) = ∇F (x0, y0) · ∇G(x0, y0)
∇F (x0, y0) ∇G(x0, y0)As curvas são ortogonais se:
∇F (x0, y0) · ∇G(x0, y0) = 0,
ou seja:
∂F
∂x
∂G
∂x
+ ∂ F
∂y
∂G
∂y
= 0
onde as derivadas parciais são calculadas no ponto (x0, y0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 191/407
7.8. ÂNGULO ENTRE CURVAS 191
Exemplos 7.8.
[1] Determine o ângulo entre as curvas x y = −2 e y2 = −4 x no ponto(−1, 2).
Sejam f (x, y) = x y + 2 e g(x, y) = 4 x + y2, ambas funções diferenciáveis;
então,∇f (x, y) = (y, x) e ∇g(x, y) = (4, 2 y). Logo,
cos(α) = ∇f (−1, 2) · ∇g(−1, 2)
∇f (−1, 2) ∇g(−1, 2)
e cos(α) =
√ 10
10 .
-2 -1
-2
2
Figura 7.21:
[2] Determine o ângulo entre as curvas x2 + y2 = 8 e 3 x2 − y2 = 8 no ponto(−2, 2).
Sejam f (x, y) = x2 + y2 e g(x, y) = 3 x2 − y2, ambas funções diferenciáveis;então, ∇f (x, y) = 2 (x, y) e ∇g(x, y) = = 2 (3 x, −y). Logo,
cos(α) = ∇f (−2, 2) · ∇g(−2, 2)
∇f (
−2, 2)
· ∇g(
−2, 2)
e cos(α) =
√ 5
5 .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 192/407
192 CAPÍTULO 7. DERIVADA DIRECIONAL
-2 -1 1 2
-3
-2
-1
1
2
3
Figura 7.22:
O gráfico de uma função y = f (x) pode ser considerado como a curva denível zero de F (x, y) = y − f (x); então:
∇F (x, y) = (
−f ′(x), 1); logo, y
−y0
= f ′(x) (x−
x0
).
7.9 Gradiente e Superfícies de Nível
Neste caso, o conjunto de nível c de f são as superfícies de nível c de f .(c ∈ R):
S c = {(x,y,z ) ∈ R3/f (x,y,z ) = c}Da proposição 7.3, segue que a equação do plano tangente à superfície de
nívelS c de f , no ponto (x0, y0, z 0) é:
∇f (x0, y0, z 0) · (x − x0, y − y0, z − z 0) = 0
se ∇f (x0, y0, z 0) = 0, ou, equivalentemente:
∂f
∂x(x0, y0, z 0) (x − x0) +
∂ f
∂y(x0, y0, z 0) (y − y0) +
∂ f
∂z (x0, y0, z 0) (z − z 0) = 0
Logo, a reta normal ao plano tangente deve ter a direção do gradiente e asequações paramétricas desta reta no ponto (x0, y0, z 0) são:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 193/407
7.9. GRADIENTE E SUPERFÍCIES DE NÍVEL 193
x(t) = x0 + t ∂f
∂x(x0, y0, z 0)
y(t) = y0 + t ∂f
∂y(x0, y0, z 0)
z (t) = z 0 + t ∂f
∂z (x0, y0, z 0), t ∈ R.
Como ∇f (x0, y0, z 0) é normal ao plano tangente a S c no ponto (x0, y0, z 0), ovetor normal unitário a S c em qualquer ponto (x,y,z ) é:
n(x,y,z ) = ∇f (x,y,z )
∇f (x,y,z ) .
Exemplos 7.9.
[1] Determine o vetor normal unitário à superfície sen(x y) = ez no ponto(1, π
2 , 0).Seja f (x,y,z ) = sen(x y)−ez . A superfície do exemplo é a superfície de nívelzero de f ;
S 0 = {(x,y,z ) ∈ R3/f (x,y,z ) = 0}.
Logo, ∇f (x,y,z ) = (y cos(x y),xcos(x y), −ez) e ∇f (1, π2 , 0) = (0, 0, −1) é o
vetor normal unitário à superfície S .
0.0
0.5
1.0
1.5
1.5
2.02
1
0
Figura 7.23: Exemplo [1].
[2] Determine o vetor normal unitário à superfície z = x2 y2 + y + 1 no ponto(0, 0, 1).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 194/407
194 CAPÍTULO 7. DERIVADA DIRECIONAL
Seja f (x,y,z ) = x2 y2 + y − z . A superfície do problema é a superfície denível −1 de f ;
S −1 = {(x,y,z ) ∈ R3/f (x,y,z ) = 0}.
Logo, ∇f (x,y,z ) = (2 x y2, 2 x2 y + 1, −1) e ∇f (0, 0, 1) = (0, 1, −1); então,
n(0, 0, 1) = 1√
2(0, 1, −1).
1.0
0.5
0.0
0.5
1.01.0
0.5
0.0
0.5
1.0
0
1
2
3
Figura 7.24: Exemplo [2].
Observação 7.1. Esta definição de plano tangente é mais geral que a dadaanteriormente.
De fato, se z = g(x, y) é uma função nas condições da proposição, entãoo gráfico de g pode ser definido como a superfície de nível zero da novafunção f (x,y,z ) = g(x, y) − z . Note que:
∇f =∂g
∂x, ∂g
∂y, −1
,
que é exatamente, o vetor normal ao plano tangente ao gráfico de f no ponto(x,y,g(x, y)).
Note que os vetores tangentes ao gráfico de f em (x,y,g(x, y)) são:
vx =
1, 0, ∂g
∂x
e vy =
0, 1, ∂g
∂y
.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 195/407
7.9. GRADIENTE E SUPERFÍCIES DE NÍVEL 195
Figura 7.25:
Lembramos, que todas as superfícies definidas por equações em três variá-veis, como as quádricas, podem ser consideradas como superfícies de algumnível de uma função de tres variáveis.
Exemplos 7.10.
[1] Seja f uma função de classe C 1 tal que f (1, 1, 2) = 1 e ∇f (1, 1, 2) =(2, 1, 3).A equação f (1, 1, 2) = 1 define implícitamente uma função g? No caso afir-mativo, determine a equação do plano tangente ao gráfico de g no ponto(1, 1, 2).
Como ∇f (1, 1, 2) = (2, 1, 3); então, temos que ∂f
∂x(1, 1, 2) = 2,
∂f
∂y(1, 1, 2) = 1
e∂f ∂z
(1, 1, 2) = 3. Pelo teorema da função implícita, existe z = g(x, y) de classe
C 1 no ponto (1, 1), g(1, 1) = 2 e:
∂g
∂x(1, 1) =
∂f
∂x(1, 1, 2))
∂f
∂z (1, 1, 2))
= −2
3 e
∂g
∂y(1, 1) = −
∂f
∂y(1, 1, 2)
∂f
∂z (1, 1, 2)
= −1
3.
Logo, a equação do plano tangente ao gráfico de g no ponto (1, 1, 2) é:
z = g(1, 1) + ∂g
∂x (1, 1) (x − 1) + ∂g
∂y (1, 1) (y − 1) = 6
−2 x
−y
3 ;
equivalentemente, 3 z + 2 x + y = 6.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 196/407
196 CAPÍTULO 7. DERIVADA DIRECIONAL
[2] O cone x2 + y2 − z 2 = 0 pode ser considerado como a superfície de nívelc = 0 da função f (x,y,z ) = x2 + y2 − z 2. Determinaremos as equações doplano tangente e da reta normal à superfície no ponto (1, 1,
√ 2):
∇f (1, 1,√
2) · (x − 1, y − 1, z −√
2) = 0.
Temos ∇
f (x,y,z ) = (2 x, 2 y,
−2 z ) e
∇f (1, 1,
√ 2) = 2(1, 1,
−
√ 2); então, a
equação do plano tangente é x + y − √ 2z = 0 e a reta normal passando por(1, 1,
√ 2) tem equações paramétricas:
x = 1 + 2 t
y = 1 + 2 t
z =√
2 − 2√
2 t;
o plano tangente à superfície contem a reta na direção (1, 1,√
2) perpendi-cular ao ∇f (1, 1,
√ 2).
-2
-1
0
1
2
-2
-1
0
1
2
0
0.5
1
1.5
2
-2
-1
0
1
2
-1
0
1
Figura 7.26:
[3] Determine a equação do plano tangente à superfície 3 x y + z 2 = 4 noponto (1, 1, 1).
Considere f (x,y,z ) = 3 x y + z 2. Logo, superfície de nível c = 4 de f é3 x y + z 2 = 4. No ponto (1, 1, 1) a equação do plano tangente à superfície denível de f é dada por:
∇f (1, 1, 1) · (x − 1, y − 1, z − 1) = 0; ∇f (x,y,z ) = (3 y, 3 x, 2 z ) e
∇f (1, 1, 1) = (3, 3, 2);
então, a equação é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 197/407
7.9. GRADIENTE E SUPERFÍCIES DE NÍVEL 197
3 x + 3 y + 2 z = 8.
[4] Determine:
(a) O vetor normal unitário a 5 x2 + y2 − 2 z 2
5 = 10 nos pontos (1, 0, 0) e
(1,√
5, 0).
(b) A equação do plano tangente à superfície 5 x2 + y2 − 2 z 2
5 = 10 no ponto
(1,√
5, 0).
(a) Seja f (x,y,z ) = 5 x2 + y2 − 2 z 2
5 ; ∇f (x,y,z ) = (10 x, 2 y, −4 z
5 ). Então:
n1 = ∇f (1, 0, 0)
∇f (1, 0, 0) = (1, 0, 0) e n2 = ∇f (1,
√ 5, 0)
∇f (1,√
5, 0) =
√ 30
30 (5,
√ 5, 0).
(b) No ponto (1, √ 5, 0), teremos:
5 x +√
5 y = 10.
Figura 7.27:
[5] Determine as equações dos planos tangentes à superfície
x2 + y2
4 + z
2
9 = 1
paralelos ao plano x + y + z = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 198/407
198 CAPÍTULO 7. DERIVADA DIRECIONAL
Como o plano x + y + z = 0 é paralelo aos planos tangentes à superfície, en-tão os vetores normais a ambos os planos devem ser paralelos; logo, existeλ = 0 tal que ∇f (x0, y0, z 0) = λ(1, 1, 1), para algum (x0, y0, z 0) na superfície.
Como ∇f (x0, y0, z 0) = (2x0, y0
2 ,
2
9z 0). Devemos resolver o sistema:
2 x0 = λ
y0 = 2λ
2 z 0 = 9λ,
sendo x02 +
y20
4 +
z 209
= 1; logo λ = ±
2
7; obtemos, assim, os pontos:
p = ±
2
7
12
, 2, 9
2
.
Logo:
∇f p
= ±√ 147
1, 1, 1
;
então, as equações dos planos tangentes nestes pontos, são:
x + y + z = ±√
14.
[6] Determine a equação do plano tangente no ponto (x0, y0, z 0) à superfíciedefinida por:
A x2 + B y2 + C z 2 = D
onde A, B, C, D ∈ R.
Consideremos f (x,y,z ) = A x2 + B y2 + C z 2 − D; logo, temos que:
∇f (x0, y0, z 0) = (2 A x0, 2 B y0, 2 C z 0)
e a equação do plano tangente no ponto (x0, y0, z 0) é:
A x0 x + B y0 y + C z 0 z = D
onde usamos o fato de que (x0, y0, z 0) pertence à superfície. Em particular, oplano tangente no ponto (x0, y0, z 0) de:
1. um elipsóide centrado na origem é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 199/407
7.10. ÂNGULO ENTRE SUPERFÍCIES 199
x0 x
a2 +
y0 y
b2 +
z 0 z
c2 = 1
2. um parabolóide hiperbólico centrado na origem é:
2 x0x
a2 −2
y0y
b2 − z
c = 0
7.10 Ângulo entre Superfícies
Em diversas áreas da ciência é importante saber determinar o ângulo for-mado pela interseção de duas superfícies num ponto dado. O ângulo entreduas superfícies num ponto comum é o menor ângulo formado pelas nor-mais a essas superfícies nesse ponto.
Figura 7.28: Interseção de superfícies.
Suponha que as superfícies são definidas por:
F (x,y,z ) = 0 e G(x,y,z ) = 0
e tem um ponto comum (x0, y0, z 0). Consideremos as funções:
w = F (x,y,z ) e w = G(x,y,z )
tais que existam os gradientes e sejam não nulos neste ponto.
As superfícies são as superfícies de nível c = 0 de w = F (x,y,z ) e w =G(x,y,z ), respectivamente. ∇F (x0, y0, z 0) e ∇G(x0, y0, z 0) são os vetores nor-mais às superfícies de nível:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 200/407
200 CAPÍTULO 7. DERIVADA DIRECIONAL
S 1 = {(x,y,z ) ∈ R3 / F (x,y,z ) = 0}
e:
S 2 =
{(x,y,z )
∈R3 / G(x,y,z ) = 0
},
respectivamente. Se ∇F (x0, y0, z 0) = 0 e ∇G(x0, y0, z 0) = 0, temos que oângulo α, formado por S 1 e S 2 é dado por:
cos(α) = ∇F (x0, y0, z 0) · ∇G(x0, y0, z 0)
∇F (x0, y0, z 0) ∇G(x0, y0, z 0)
As superfícies são ortogonais no ponto (x0, y0, z 0) se:
∂F
∂x
∂G
∂x +
∂F
∂y
∂G
∂y +
∂F
∂z
∂G
∂z = 0
onde as derivadas parciais são calculadas no ponto (x0, y0, z 0).
Exemplos 7.11.
[1] Determine o ângulo formado pelas superfícies:
z − exy + 1 = 0 e z − ln(
x2 + y2) = 0
no ponto (0, 1, 0).
Sejam F (x,y,z ) = z − exy + 1 e G(x,y,z ) = z − ln(
x2 + y2);
∇F (x,y,z ) = (−y exy, −x exy, 1),
∇G(x,y,z ) = ( −x
x2 + y2, −y
x2 + y2, 1),
∇F (0, 1, 0) = (
−1, 0, 1) e
∇G(0, 1, 0) = (0,
−1, 1);
logo, ∇F (0, 1, 0) · ∇G(0, 1, 0) = 1; então, cos(α) = 1
2 e α =
π
3.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 201/407
7.10. ÂNGULO ENTRE SUPERFÍCIES 201
Figura 7.29: Superfícies do exemplo [1].
[2] Determine o ângulo formado pelas superfícies:
x y + y z − 4 z x = 0 e 3 z 2 − 5 x + y = 0
no ponto (1, 2, 1).Sejam F (x,y,z ) = x y + y z − 4 z x e G(x,y,z ) = 3 z 2 − 5 x + y
∇F (x,y,z ) = (y − 4 z, x + z, y − 4 x), ∇G(x,y,z ) = (−5, 1, 6 z ),
∇F (1, 2, 1) = (−2, 2, −2), ∇G(1, 2, 1) = (−5, 1, 6);
logo, ∇F (1, 2, 1) · G(1, 2, 1) = 0; então, cos(α) = 0 e:
α = π
2.
[3] Reta tangente à interseção de duas superfícies.
Seja C a curva (ou ponto) dada pela interseção das superfícies de nível:
S 1 = {(x,y,z ) ∈ R3 / F (x,y,z ) = 0} e S 2 = {(x,y,z ) ∈ R3 / G(x,y,z ) = 0}.
Sejam w = F (x,y,z ), w = G(x,y,z ) duas funções tais que as derivadasparciais existam e P = (x0, y0, z 0) um ponto comum às duas superfícies.
Considere os vetores:
N1 = ∇F (x0, y0, z 0) e N2 = ∇G(x0, y0, z 0),

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 202/407
202 CAPÍTULO 7. DERIVADA DIRECIONAL
N1 é normal à S 1 no ponto P e N2 é normal à S 2 no ponto P . Logo N1
e N2 são normais a C no ponto P . Se N1 e N2 não são paralelas, então ovetor tangente a C no ponto P tem a mesma direção que N1 ×N2 no pontoP (produto vetorial dos vetores normais). Como isto vale para qualquerponto P da interseção, temos que se N1 ×N2 = (a,b,c), então a equação naforma parámetrica da reta tangente a C no ponto P é:
x = x0 + t a
y = y0 + t b
z = z 0 + t c, t ∈ R.
Por exemplo, determinemos a equação da reta tangente à interseção dasseguintes superfícies 3 x2 + 2 y2 + z 2 = 49 e x2 + y2 − 2 z 2 = 10 no ponto(3, −3, 2).
Sejam F (x,y,z ) = 3 x2 + 2 y2 + z 2−49 e G(x,y,z ) = x2 + y2−2 z 2−10: então:
N1 = ∇F (3, −3, 2) = 2 (9, −6, 2) e N2 = ∇G(3, −3, 2) = 2 (3, −3, −4)
logo, (9, −6, 2) × (3, −3, −4) = 3 (10, 14, −3); a equação, na forma paramé-trica, da reta tangente pedida é:
x = 3 + 10 t
y = −3 + 14 t
z = 2 − 3 t.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 203/407
7.11. EXERCÍCIOS 203
7.11 Exercícios
1. Calcule o gradiente das seguintes funções:
(a) z = 2 x2 + 5 y2
(b) z =
1
x2 + y2
(c) w = 3 x2 + y2 − 4 z 2
(d) w = cos(x y) + sen(y z )
(e) w = ln(x2 + y2 + z 2)
(f) w = cos(2 x) cos(3 y) senh(4 x)
(g) w = x y ez + y z ex
(h) w = x y
z
(i) w = ln(x
2
+ y
2
+ z
2
+ 1)(j) w =
1
x2 + y2 + z 2 + 1
(k) w = log6(x + y2 + z 3)
(l) w = x y2 z 3
x2 + y2 + z 2 + 1
2. Determine a derivada direcional da função dada na direção v:
(a) z = 2 x2
+ 5 y2
, v = (cos(π2 ),sen(
π2 )).
(b) z = 1
x2 + y2, v = (1, 1).
(c) z = x2y3, v = 1
5 (3, −4).
(d) z = x2 + x y + y2 + 3 x − 3 y + 3, v = 1√
5(1, 2).
(e) z = y2 tg2(x), v = 1
2 (−
√ 3, 1).
(f) w = 3 x2
+ y2
− 4 z 2
, v = (cos(
π
3 ),cos(
π
4 ),cos(
2π
3 ).
(g) w = cos(x y) + sen(y z ), v = (−1
3, 2
3, 2
3).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 204/407
204 CAPÍTULO 7. DERIVADA DIRECIONAL
(h) w = ln(x2 + y2 + z 2), v =
√ 3
3 (1, −1, −1).
(i) w = cos(2 x) cos(3 y) senh(4 z ), v =
√ 3
3 (1, −1, 1).
(j) w = x y ez + y z ex, v = (2, 2, 1).
(k) w =
x y
z , v = (1, 1, 1).(l) w = x sen(y) + y sen(z ) + z sen(x), v = (1, 1, 1).
(m) w = exyz , v = (1, 1, 1).
(n) w = e1+x2+y2+z2 , v = (1, 0, 1).
(o) w = arcsec(x y z ), v = (0, 0, 1).
(p) w = 1
x +
2
y +
3
z , v = (1, 1, 1).
(q) w = 1
x2 +
2
y2 +
3
z 3, v = (1, 1, 1).
(r) w = sen(log3(x + y + z )), v = (2, 1, 2).
3. Determine o valor máximo da derivada direcional de f no ponto dadoP e a direcão em que ocorre:
(a) z = 2 x2 + 3 y2, P = (1, −1).
(b) z =
4 − x2 − y2, P = (1, 1).
(c) z = x y, P = (1, 0).
(d) z = e
2y
arctg(
y
3 x), P = (1, 3).(e) w = sen(x y) + cos(y z ), P = (−3, 0, 7).
(f) w = ex cos(y) + ey cos(z ) + ez cos(x), P = (0, 0, 0).
(g) w = 2 x y z + y2 + z 2, P = (2, 1, 1).
(h) w = exyz , P = (1, 1, 1).
(i) w = cosh(x y z ), P = (1, 0, 1).
(j) w =
x2 + y2 + z 2 + 1, P = (1, 1, 1).
4. Verifique as seguintes identidades:
(a) ∇(f + g) = ∇f + ∇g

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 205/407
7.11. EXERCÍCIOS 205
(b) ∇(f g) = f ∇g + g ∇f
(c) ∇f
g
=
g ∇f − f ∇g
g2 se g = 0
5. Se f (x, y) = 2 e−x2+e−3y2 é a altura de uma montanha na posição (x, y),
em que direção, partindo de (1, 0) se deveria caminhar para subir amontanha mais rapidamente?.
6. Em que direção a derivada direcional de f (x, y) = x2 − y2
x2 + y2 no ponto
(1, 1) é zero?.
7. Uma função tem derivada direcional igual a 2 na direção do vetor(2, 2), no ponto (1, 2) é igual a −3 na direção do vetor (1, −1), nomesmo ponto. Determine o gradiente d função no ponto (1, 2).
8. Verifique que os gráficos de z = x2 + y2 e z = −x2 − y2 − xy3 sãotangentes na origem.
9. Uma lámina de metal está situada num plano de modo que a tempe-ratura T = T (x, y) num ponto (x, y) é inversamente proporcional ádistância do ponto á origem. Sabendo que a temperatura no pontoP = (3, 4) é 100oC , determine:
(a) A taxa de variação de T no ponto P e na direção o vetor (1, 1).
(b) A direção em que T aumenta mais rapidamente no ponto P .
(c) A direção em que T decresce mais rapidamente no ponto P .(d) A direção em que a taxa de variação é zero..
10. Determine o plano tangente e a reta normal às superfícies no ponto P :
(a) x2 + x y2 + y3 + z + 1 = 0, P = (2, −3, 4).
(b) x2 + 2 x y + y2 + z − 7 = 0, P = (1, −2, 6).
(c) x2 − y2 − z 2 = 1, P = (3, 2, 2).
(d) x2 + y2
−z 2 = 25, P = (5, 5, 5).
(e) x − y − z 2 = 3, P = (3, 4, 2).
(f) 3√
x2 + 3
y2 + 3√
z 2 = 3√
a2, P = (x0, y0, z 0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 206/407
206 CAPÍTULO 7. DERIVADA DIRECIONAL
(g) ln( y
2 z ) − x = 0, P = (0, 2, 1).
(h) x2
a2 − y2
b2 +
z 2
c2 = 1, P = (x0, y0, z 0).
(i) x2
a2 − y2
b2 − z 2
c2 = 1, P = (x0, y0, z 0).
(j) x2
a2 + y
2
b2 − z
2
c2 = 1, P = (x0, y0, z 0).
11. Um nave está perto da órbita de um planeta na posição (1, 1, 1). Sa- bendo que a temperatura da blindagem da nave em cada ponto é dadapor T (x,y,z ) = e−(x2+3y2+2z2) graus, determine a direção que a navedeve tomar para perder temperatura o mais rapidamente possível.
12. Determine a equação do plano tangente à x2 − 2 y2 − 4 z 2 = 16 e que éparalelo ao plano 4 x − 2 y + 4 z = 5.
13. A densidade de uma bola esférica de centro na origem, num ponto(x,y,z ) é proporcional ao quadrado da distn̂cia do ponto á origem. Efetuando um deslocamento a partir do ponto (1, 2, 3) do interior da
bola, na direção do vetor (1, 1/2, −1), a densidade aumenta ou dimi-nui? Justifique.
14. Determine o ângulo entre as seguintes superfícies no ponto P .
(a) x2 y2 + 2 x + z 2 = 16, 3 x2 + y2 − 2 z = 9 e P = (2, 1, 2).
(b) x2
+3 y2
+2 z 2
= 9, x2
+y2
+z 2
−8 x−8 y−6 z +24 = 0 e P = (2, 1, 1).(c) 3 x2 + 2 y2 − 2 z = 1, x2 + y2 + z 2 − 4 y − 2 z + 2 = 0 e P = (1, 1, 2).
(d) z − x2 − y2 + 2 x y = 0, z − x2 + y2 = 0 e P = (0, 0, 0).
(e) x2 − y2 = 1, 3 x2 + y2 − 2 z = 9 e P = (1, 0, 0).
(f) x2 − 2 y z + y3 = 4, x2 + (4 c − 2) y2 − c z 2 + 1 = 0 e P = (1, −1, 2),(c ∈ R).
15. Determine o ponto (ou pontos) em que o gradiente da função :f (x, y) = ln(x + y−1) é igual a (1,
−16/9).
16. Determine a equação da reta tangente à interseção das seguintes su-perfícies: x2 − y = 0 e y + z 2 = 16 no ponto (4, 16, 0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 207/407
7.11. EXERCÍCIOS 207
17. Determine o ângulo entre os gradientes da função : f (x, y) = ln(y
x)
nos pontos (1/2, 1/4) e (1, 1).
18. Sejam as seguintes superfícies x2 + y2 + z 2 = 6 e 2 x2 + 3 y2 + z 2 = 9.
(a) Determine as equações dos planos tangentes a cada superfície noponto (1, 1, 2), respectivamente.
(b) Determine o ângulo entre as superfícies no ponto (1, 1, 2).
(c) Determine a equação da reta tangente à interseção das superfíciesno ponto (1, 1, 2).
19. O potencial V associado a um campo elétrico E é dado por:
V (x, y) = 1
x2 + y2
.
Sabendo que E = −grad(V ), determine E (4, 3). Em que direção, apartir do ponto (4, 3) a taxa de variação do potencial é máxima?
20. Sejam φ, η e ψ funções de uma variável real com derivadas de segundaordem satisfazendo:
φ′′(x) + λ2 φ(x) = 0 e ψ′′(t) + c2 λ2 ψ(t) = 0,
sendo λ, c constantes. Verifique que u(x, t) = φ(x) ψ(t) é solução daequação da onda.
21. Verifique que w(x, t) = 1√ t e−
x2
4kt , t > 0 e k constante, é solução daequação do calor:
∂w
∂t − k
∂ 2w
∂x2 = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 208/407
208 CAPÍTULO 7. DERIVADA DIRECIONAL
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 209/407
Capítulo 8MÁXIMOS E MÍNIMOS
8.1 Introdução
Definição 8.1. Sejam A ⊂ Rn
um conjunto aberto, f : A ⊂ Rn
−→ R umafunção e ε > 0 (pequeno).
1. Um ponto x0 é um ponto de mínimo local de f se existe B(x0, ε), talque:
f (x0)
≤f (x), para todo x
∈B(x0, ε)
2. Um ponto x0 é um ponto de máximo local de f se existe B(x0, ε), talque:
f (x) ≤ f (x0), para todo x ∈ B(x0, ε)
3. Em ambos os casos, x0 é dito extremo relativo ou local de f e f (x0) édito valor extremo de f .
209

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 210/407
210 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.1:
Exemplos 8.1.
[1] Se z = f (x, y) = x2 + y2, então, (0, 0) é ponto de mínimo local de f .
De fato, x2
+ y2
≥ 0, para todo (x, y) ∈ R2
.
0 = f (0, 0) ≤ f (x, y) = x2 + y2, para todo (x, y) ∈ Dom(f )
e o valor mínimo é z = 0, que é atingido na origem.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.2: Exemplo [1].
[2] Se z = f (x, y) = −x2; então {(0, y) ∈ R2/y ∈ R} é um conjunto infinitode pontos de máximo locais de f .
De fato, −x2 ≤ 0, para todo (x, y) ∈ R2 e f (0, y) = 0. Logo f (x, y) ≤ f (0, y)para todo (x, y) ∈ R2. Então, f atinge seu valor máximo 0 em qualquerponto da reta {(0, y) ∈ R2/y ∈ R}.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 211/407
8.1. INTRODUÇÃO 211
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.3: Exemplo [2].
Teorema 8.1. Seja f : A ⊂ Rn −→ R uma função de classe C 1, definida noaberto A e x0 ∈ A um ponto extremo local de f . Então ∇f (x0) = 0̃.
Para a prova, veja o apêndice.
Definição 8.2.
1. Um ponto x0 tal que ∇f (x0) = 0 é dito ponto crítico de f e f (x0) édito valor crítico de f . Caso contrário, x0 é dito ponto regular de f ef (x0) valor regular de f .
2. Um ponto crítico que não é máximo local nem mínimo local é cha-mado de ponto de sela.
Para n = 3, ∇f (x,y,z ) = 0̃ é equivalente a resolver o seguinte sistema deequações:
∂f
∂x (x,y,z ) = 0
∂f
∂y(x,y,z ) = 0
∂f
∂z (x,y,z ) = 0.
Analogamente para n = 2:
∂f
∂x(x, y) = 0
∂f
∂y(x, y) = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 212/407
212 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
Agora, podemos enunciar o Teorema da função implícita de uma formamais geométrica:Seja f uma função de classe C k (k > 0) definida num aberto deRn. Para todovalor regular c de f , o conjunto f −1(c) ( se não for vazio) é uma superfície(curva) de classe C k.
Exemplos 8.2.[1] Seja z = f (x, y) = x2 + y2. Então ∇f (x, y) = (2 x, 2 y) e:
2 x = 0
2 y = 0;
a única solução do sistema é x = 0 e y = 0; (0, 0) é ponto crítico de f .
[2] Seja z = f (x, y) = 4 x y2 − 2 x2 y − x.
(1) ∂f
∂x(x, y) = 4 y2
−4 x y
−1 = 0
(2) ∂f
∂y(x, y) = 8 x y − 2 x2 = 0;
o sistema é equivalente a:(1) 4 y2 − 4 x y = 1
(2) 2 x (4 y − x) = 0;
de (2): as soluções são x = 0 ou 4y − x = 0.
Se x = 0, então, de (1), 4 y2 = 1, y = ±1
2 e (0, ±1
2 ) são os pontos críticos. Se4 y = x, então, de (1), 3 x2 = −4, que não tem solução real.
[3] Seja f (x, y) = xy
8 +
1
x +
1
y, x, y = 0.
(1) ∂f
∂x = y
8 − 1
x2 = 0
(2) ∂f
∂y = x
8 − 1
y2 = 0;
como x, y = 0, tirando o valor de uma das variáveis em (1) e subtituindoem (2), obtemos a solução x = y = 2. Logo (2, 2) é o ponto crítico de f .
[4] Seja f (x, y) = 2 (x2 + y2) e−(x2+y2).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 213/407
8.1. INTRODUÇÃO 213
(1) ∂f
∂x = 4xe−(x2+y2)(1 − x2 − y2) = 0
(2) ∂f
∂y = 4ye−(x2+y2)(1 − x2 − y2) = 0,
que é equivalente ao sistema:(1) x (1 − x2 − y2) = 0
(2) y (1 − x2 − y2) = 0;
de (1) e (2), as soluções do sistema são: x = y = 0 e x2 + y2 = 1. Observe queesta função tem uma curva de pontos críticos. Os pontos críticos são (0, 0) eos pontos do círculo {(x, y) ∈ R2/ x2 + y2 = 1}.
Figura 8.4: Exemplo [4].
[5] Seja f (x, y) = (x2 − y2) e−x2+y2
2 .
(1) ∂f
∂x = e−
(x2+y2)2 (2 x − x (x2 − y2)) = 0
(2) ∂f
∂y = e−
(x2+y2)2 (−2 y − y (x2 − y2)) = 0,
que é equivalente ao sistema:(1) x (2 − x2 + y2) = 0
(2) y (−2 − x2 + y2) = 0;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 214/407
214 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
de (1) e (2), as soluções do sistema são: (0, 0), (±√ 2, 0) e (0, ±√
2), que sãoos pontos críticos de f .
Figura 8.5: Exemplo [5].
[6] Seja f (x, y) = x2 − y2
x2 + y2 + 1.
(1) ∂f
∂x =
2 x (1 + 2 y2)
x2 + y2 + 1 = 0
(2) ∂f
∂y =
2 y (1 + 2 x2)
x2 + y2 + 1 = 0,
que é equivalente ao sistema:
(1) x = 0
(2) y = 0;
a única solução do sistema é: (0, 0), que é o ponto crítico de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 215/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 215
Figura 8.6: Exemplo [6].
[7] Seja f (x,y,z ) =4√
3 x y z
3 + x + y + z . O sistema ∇f (x,y,z ) = 0 é equivalente a:
(1) y z (3 − 3 x + y + z ) = 0
(2) x z (3 + x − 3 y + z ) = 0
(3) x y (3 + x + y − 3 z ) = 0;
de (1), (2) e (3), temos que o sistema tem como únicas soluções (0, 0, 0) e(3, 3, 3) , que são os pontos críticos de f .
8.2 Determinação dos Extremos Locais
Seja f : A ⊂ R2
−→ R. Para dimensão 2, o fato de que ∇f (x0) = 0 implicaem que o plano tangente ao gráfico de f no ponto x0 seja paralelo ao plano
xy, fato análogo ao que ocorre em dimensão 1.
Teorema 8.2. Seja a família de funções:
f (x, y) = A x2 + 2 B x y + C y2,
tal que A, B, C ∈ R e não são todas simultaneamente nulas. Denotemospor ∆ = A C − B2.
1. Se ∆ > 0 e A > 0, então (0, 0) é ponto de mínimo de f .
2. Se ∆ > 0 e A < 0, então (0, 0) é ponto de máximo de f .
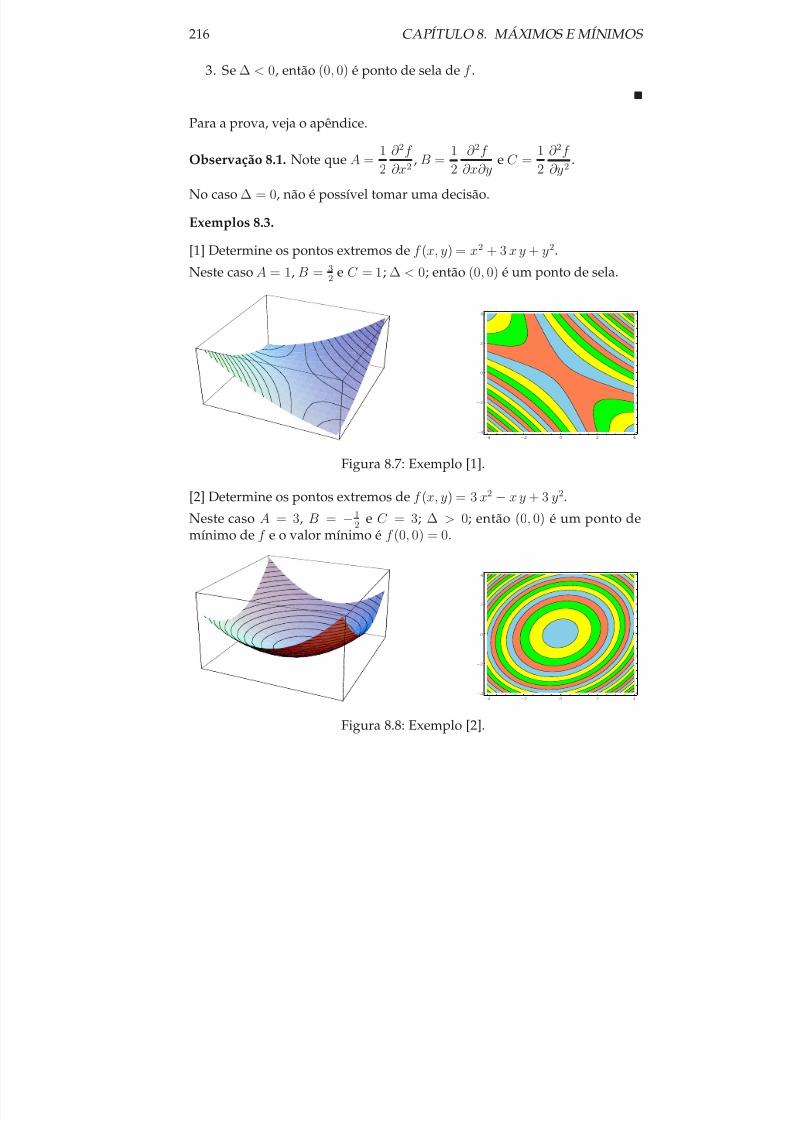
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 216/407
216 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
3. Se ∆ < 0, então (0, 0) é ponto de sela de f .
Para a prova, veja o apêndice.
Observação 8.1. Note que A = 1
2
∂ 2f
∂x2
, B = 1
2
∂ 2f
∂x∂y
e C = 1
2
∂ 2f
∂y2
.
No caso ∆ = 0, não é possível tomar uma decisão.
Exemplos 8.3.
[1] Determine os pontos extremos de f (x, y) = x2 + 3 x y + y2.
Neste caso A = 1, B = 32 e C = 1; ∆ < 0; então (0, 0) é um ponto de sela.
-4 -2 0 2 4
-4
-2
0
2
4
Figura 8.7: Exemplo [1].
[2] Determine os pontos extremos de f (x, y) = 3 x2 − x y + 3 y2.
Neste caso A = 3, B = −1
2 e C = 3; ∆ > 0; então (0, 0) é um ponto demínimo de f e o valor mínimo é f (0, 0) = 0.
-4 -2 0 2 4
-4
-2
0
2
4
Figura 8.8: Exemplo [2].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 217/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 217
Denotemos por:
∆ = det(H (x, y))
onde:
H (x, y) =
∂ 2f
∂x2
∂ 2f
∂x∂y
∂ 2f
∂y∂x
∂ 2f
∂y2
e as derivadas parciais são calculadas no ponto (x, y). A matriz H (x, y) échamada de matriz Hessiana de f .
Teorema 8.3. Sejam f uma função de classe C 2 definida num conjunto aber-to U
⊂R2 e (x0, y0)
∈U um ponto crítico de f e denotemos por:
A(x, y) = ∂ 2f
∂x2(x, y) e ∆(x, y) = det
H (x, y)
.
1. Se A(x0, y0) > 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de mínimo localde f em U .
2. Se A(x0, y0) < 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de máximo localde f em U .
3. Se ∆(x0, y0) < 0, então (x0, y0) é ponto de sela de f em U .
4. Se ∆(x0, y0) = 0, nada se pode concluir.
Para a prova, veja o apêndice.
Observações 8.1.
1. Se (x0, y0) é ponto de mínimo local de f , então as curvas de nível e ográfico de f numa vizinhança de (x0, y0) e (x0, y0, f (x0, y0)), respecti-vamente, são da forma:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 218/407
218 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.9:
2. Se (x0, y0) é ponto de máximo local de f , então as curvas de nível e ográfico de f numa vizinhança de (x0, y0) e (x0, y0, f (x0, y0)), respecti-vamente, são da forma:
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.10:
3. Se (x0, y0) é ponto de sela de f , então as curvas de nível e o gráfico def numa vizinhança de (x0, y0) e (x0, y0, f (x0, y0)), respectivamente, sãoda forma:
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.11:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 219/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 219
4. Se f é uma função contínua no ponto (x0, y0) e se as derivadas parci-ais de f não existem no ponto (x0, y0), mesmo assim é possível queeste ponto seja extremo e deve ser examinado separadamente. Porexemplo, f (x, y) =
x2 + y2 é contínua em R2 e as derivadas parci-ais na origem não existem. Por outro lado 0 ≤
x2 + y2, para todo
(x, y) ∈ R2 e f (0, 0) = 0 ≤ f (x, y), para todo (x, y) ∈ R2; logo, (0, 0) é
ponto de mínimo local de f . Veja o exercício 6).
Figura 8.12:
5. No Cálculo em uma variável, se uma função contínua possui dois pon-tos de máximo local, necessariamente deve existir um ponto de mí-nimo local. No caso de várias variáveis, uma função pode ter doispontos de máximo e não possuir nenhum ponto de mínimo. De fato:
Exemplos 8.1.
Seja f (x, y) = −(x2
− 1)2
− (x2
y − x − 1)2
; claramente f é contínua em R2
.Determinemos os pontos críticos:
∂f
∂x = −2
2 x (x2 − 1) + (1 − 2x y) (1 + x − x2 y)
= 0
∂f
∂y = 2 x2 (1 + x − x2 y) = 0.
Resolvendo o sistema obtemos os pontos críticos (−1, 0) e (1, 2).
A(x, y) = 2 + 4 y + 12 x y − 12 x2 (y2 + 1)
∆(x, y) = −8 x2 (2 + 6 x + x2 (5 − 7 y) − 9 x3 y + x4 (5 y2 − 3));

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 220/407
220 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
logo, A(−1, 0) = −10 e ∆(−1, 0) = 16; A(1, 2) = −26 e ∆(1, 2) = 16. Ambosos pontos são de máximo local de f e f não possui pontos de mínimo.
Figura 8.13: Desenhos do gráfico de f ao redor dos pontos de máximo locale o gráfico de f
-1.4 -1.2 -1 -0.8 -0.6
-0.4
-0.2
0
0.2
0.4
0.6 0.8 1 1.2 1.4
1.6
1.8
2
2.2
2.4
-1 -0.5 0 0.5 1 1.5
-1
0
1
2
3
Figura 8.14: As respectivas curvas de níveis.
Pode existir um ponto de sela quando existem dois pontos de máximo oude mínimo. De fato, seja:
f (x, y) = x4 + y4 − 4 x y + 1;
claramente f é contínua em R2. Os pontos críticos são (0, 0), (−1, −1) e (1, 1)
e (0, 0) é ponto de sela, (−1, −1) e (1, 1) são pontos de mínimo local de f .Se consideramos g(x, y) = −f (x, y), o ponto (0, 0) é ponto de sela e (−1, −1)e (1, 1) são pontos de máximo local de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 221/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 221
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Figura 8.15: Curvas de nível e gráfico de f (x, y) = x4 + y4 − 4 x y + 1
8.2.1 Exemplos
[1] Classifique os pontos críticos de f (x, y) = x2 + y2 + x2 y + 4.
Determinemos os pontos críticos: Resolvemos o sistema:
∂f
∂x = 2 x + 2 x y = 2 x (1 + y) = 0
∂f
∂y = 2 y + x2 = 0,
que é equivalente a: x (1 + y) = 0
2 y + x2 = 0.
Os pontos críticos são (0, 0), (√ 2, −1) e (−√ 2, −1).
H (x, y) =
2 (y + 1) 2 x
2 x 2
.
A(x, y) = 2 (y + 1), ∆(x, y) = 4 (1 + y − x2).
Ptos. Críticos A ∆ T ipo V alor
(0, 0) 2 4 mín 4(√ 2, −1) 0 −8 sela
(−√
2, −1) 0 −8 sela

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 222/407

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 223/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 223
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 8.17: Curvas de nível e gráfico do examplo [2].
[3] Classifique os pontos críticos de f (x, y) = (x2 − y2) e−(x2+y2
2 ).
Sabemos que f possui os seguintes pontos críticos: (0, 0), (√
2, 0), (−√ 2, 0),
(0,√
2) e (0, −√ 2).
H (x, y) = e−(x2+y2
2 )
2 − 5 x2 + y2 + x4 − x2 y2 (x2 − y2) x y
(x2
−y2) x y (5 y2 + x2 y2
−y4
−x2
−2
A(x, y) = e−(
x2+y2
2 ) (2 − 5 x2 + y2 + x4 − x2 y2),
Ptos. Críticos A ∆ T ipo V alor
(0, 0) > 0 < 0 sela(√
2, 0) < 0 > 0 máx 2 e−1
(−
√ 2, 0) < 0 > 0 máx 2 e−1
(0, √ 2) > 0 > 0 mín −2 e−1
(0, −√
2) > 0 > 0 mín −2 e−1

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 224/407
224 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.18: Curvas de nível e gráfico do examplo [3].
[4] Classifique os pontos críticos de f (x, y) = x4 + y4 − 2 (x − y)2.
Determinemos os pontos críticos:
(1) ∂f
∂x = 4 (x3 − x + y) = 0
(2) ∂f
∂y = 4 (y3 + x − y) = 0;
somando as equações ((1) + (2)): y = −x; de (2) obtemos que y = 0 ouy = ±√
2 e temos as seguintes soluções: (0, 0), (√
2, −√ 2) e (−√
2,√
2).
A(x, y) = 12 x2
−4, ∆(x, y) =
−48 (x2 + y2
−3 x2 y2).
Pts. Críticos A ∆ T ipo V alor
(0, 0) < 0 0 ?(√
2, −√
2) > 0 > 0 mín −8
(−√
2,√
2) > 0 > 0 mín −8
Analisemos separadamente o ponto crítico (0, 0):
A(0, 0) < 0 e ∆(0, 0) = 0;
logo, o teorema não pode ser aplicado, mas examinaremos o sinal de f numavizinhança de (0, 0): f (0, 0) = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 225/407
8.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 225
Aproximando-se de (0, 0) pela reta y = x, temos f (x, x) = 2 x4 > 0.
Aproximando-se pelo eixo dos x, (y = 0), temos f (x, 0) = x2 (x2 − 2) < 0 sex2 < 2; logo f toma valores positivos e negativos numa vizinhança de (0, 0);então (0, 0) não é ponto de máximo nem de mínimo.Nas curvas de nível de f , podem ser observados os pontos de mínimo eperto de (0, 0) não aparecem pontos de sela ou extremos:
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.19: Curvas de nível e gráfico do examplo [4].
[5] Classifique os pontos críticos de f (x, y) = 1 − 3
x2 + y2.
Determinemos os pontos críticos:
(1)
∂f
∂x = − 2 x
3 3
(x2 + y2)2 = 0
(2) ∂f
∂y = − 2 y
3 3
(x2 + y2)2= 0.
As derivadas parciais em (0, 0) não existem; logo, não tem pontos críticos.A função é contínua em (0, 0); logo, apresenta uma "quina"na origem. Poroutro lado:
1 = f (0, 0) ≥ f (x, y) = 1 − 3
x2
+ y2
para todo (x, y) ∈ R2; então (0, 0) é um ponto de máximo de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 226/407
226 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
-2 -1 0 1 2
-2
-1
0
1
2
Figura 8.20: Curvas de nível e gráfico do examplo [5].
[6] Determine os pontos extremos de f (x, y) = x2 − 2 x y + y2.
Determinemos os pontos críticos:
∂f
∂x = 2 (x − y) = 0
∂f
∂y = 2 (y − x) = 0.
Resolvendo o sistema obtemos y = x e os pontos críticos de f são os pontosda reta y = x. A(x, y) = 2 e ∆(x, y) = 0.
Como antes, notamos que: f (x, x) = 0 e f (x, y) = (x − y)2 > 0 se x = y ; logoos pontos críticos (x, x) são pontos de mínimos locais.
-2
-1
0
1
2 -2
-1
0
1
2
-1
0
1
2
Figura 8.21: Curvas de nível e gráfico do examplo [6].
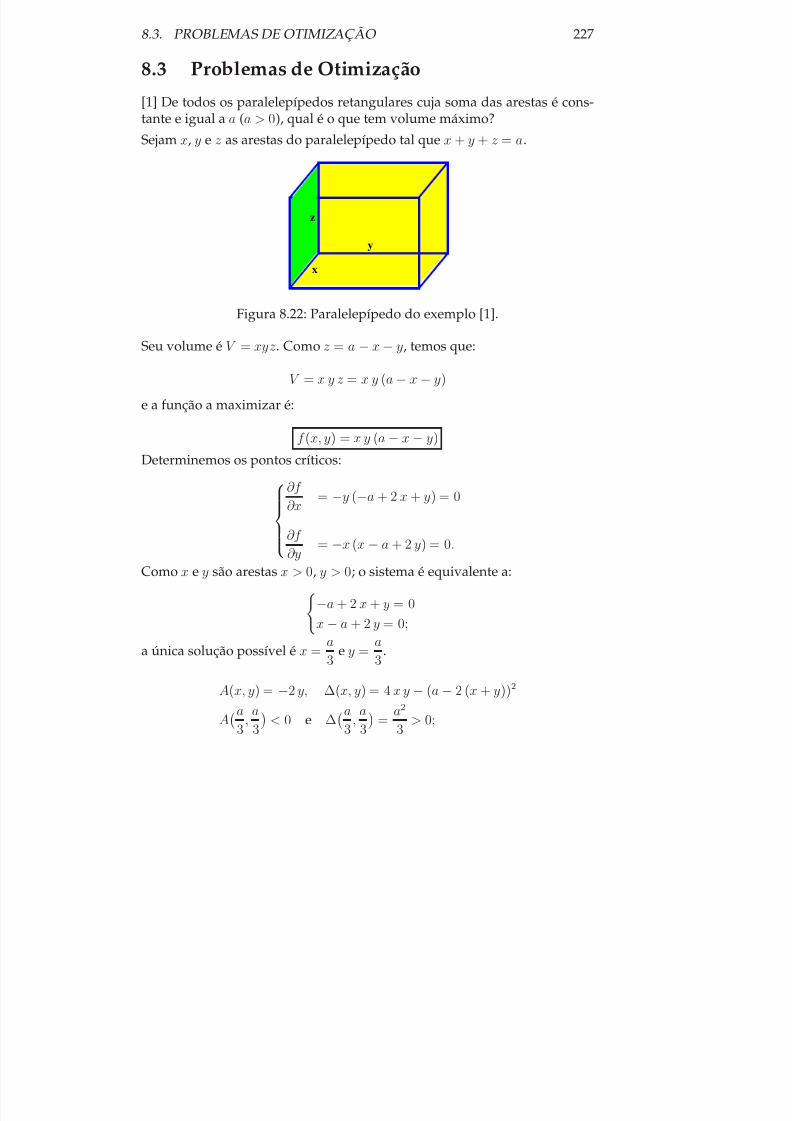
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 227/407
8.3. PROBLEMAS DE OTIMIZAÇÃO 227
8.3 Problemas de Otimização
[1] De todos os paralelepípedos retangulares cuja soma das arestas é cons-tante e igual a a (a > 0), qual é o que tem volume máximo?
Sejam x, y e z as arestas do paralelepípedo tal que x + y + z = a.
x
y
z
Figura 8.22: Paralelepípedo do exemplo [1].
Seu volume é V = xyz . Como z = a − x − y, temos que:
V = x y z = x y (a − x − y)
e a função a maximizar é:
f (x, y) = x y (a − x − y)
Determinemos os pontos críticos:
∂f
∂x = −y (−a + 2 x + y) = 0
∂f
∂y = −x (x − a + 2 y) = 0.
Como x e y são arestas x > 0, y > 0; o sistema é equivalente a:−a + 2 x + y = 0
x − a + 2 y = 0;
a única solução possível é x = a
3 e y =
a
3.
A(x, y) = −2 y, ∆(x, y) = 4 x y − (a − 2 (x + y))
2
Aa
3, a
3
< 0 e ∆a
3, a
3
=
a2
3 > 0;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 228/407
228 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
logoa
3, a
3
é ponto de máximo. As arestas são x =
a
3, y =
a
3 e z =
a
3; logo o
volume é:
V = a3
27.
O paralelepípedo é um cubo.
[2] Determine a distância mínima da origem ao plano x + 3y + z = 6.
Note que o plano não passa pela origem.
Figura 8.23: Exemplo [2].
O quadrado da distância da origem ao ponto (x,y,z ) é dada por:
d2 = x2 + y2 + z 2;
o ponto (x,y,z ) pertence ao plano; logo, z = 6−
x−
3y e minimizaremos aseguinte função:
f (x, y) = x2 + y2 + (6 − x − 3 y)2.
Determinemos os pontos críticos:
∂f
∂x = 2 (2 x + 3 y − 6) = 0
∂f
∂y = 2 (3 x + 10 y − 18) = 0;
o sistema tem uma única solução: 6
11, 18
11
, que é o ponto crítico de f .
Por outro lado, A(x, y) = 4 e ∆(x, y) = 44. Em particular,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 229/407
8.3. PROBLEMAS DE OTIMIZAÇÃO 229
A 6
11, 18
11
> 0, e ∆ 6
11, 18
11
> 0;
então 6
11, 18
11
é um ponto de mínimo local de f ; z =
6
11; logo,
d =
6√
11
11 .[3] Determine o valor máximo da soma dos co-senos dos ângulos de umtriângulo.
Devemos maximizar:
w = cos(x) + cos(y) + cos(z ),
onde x, y, z são os ângulos do triângulo dado. Mas, x + y + z = π; logoz = π − x − y.
f (x, y) = cos(x) + cos(y) + cos(π − (x + y)) = cos(x) + cos(y) − cos(x + y).
Determinemos os pontos críticos:
(1) ∂f
∂x = −sen(x) + sen(x + y) = 0
(2) ∂f
∂y = −sen(y) + sen(x + y) = 0;
fazendo (1)
−(2), temos sen(x) = sen(y); então, x = y ou x = π
−y.
(a) Se x = y , da primeira equação obtemos:
sen(x) − sen(2 x) = 0;
logo sen(x) = 0 ou cos(x) = 1
2. Se sen(x) = 0, x = 0 ou x = π, o que é
impossível. Se cos(x) = 1
2, x =
π
3; como x = y, tem-se y =
π
3, logo o ponto
crítico éπ
3, π
3
.
(b) se x = π
−y, da segunda equação obtemos; sen(y) = 0; logo y = 0 ou
y = π, o que é impossível.
Portanto, π
3, π
3
é o único ponto crítico de f . Por outro lado:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 230/407
230 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
A(x, y) = −cos(x) + cos(x + y),
∆(x, y) = cos(x) (cos(y) − cos(x + y)) − cos(y) cos(x + y),
A
π
3, π
3 < 0 e ∆
π
3, π
3 > 0;
logo,
π3
, π3
é um ponto de máximo local para f . Como z = π −x−y, z = π
3e o valor máximo da soma é:
cosπ
3
+ cosπ
3
+ cosπ
3
=
3
2.
[4] Uma caixa retangular tem três faces nos planos coordenados e um vérticeP = (x,y,z ) no primeiro octante sobre a superfície x2 + y2 + z = 1. Calculeo volume da maior caixa com essas características.
O volume da caixa é V = xyz onde x, y e z são os comprimentos das arestasda caixa; z = 1
−x2
−y2. Seja f (x, y) = x y (1
−x2
−y2). Determinemos os
pontos críticos:
∂f
∂x = y (1 − 3 x2 − y2) = 0
∂f
∂y = x (1 − x2 − 3 y2) = 0;
x e y são arestas, logo x > 0, y > 0 e o sistema é equivalente a:
1 − 3 x2 − y2 = 0
1 − x2
− 3 y2
= 0;
logo, o único ponto crítico admissível é: 1
2, 1
2
, pois x e y são comprimentos
das arestas da caixa (x > 0 e y > 0).
A(x, y) = −6 x y,
∆(x, y) = 36 x2y2 − (1 − 3 x2 − 3 y2)2,
A1
2, 1
2
= −3
2 e ∆1
2, 1
2
=
35
4 ;
então
12
, 12
é um ponto de máximo, z = 1
2 e V = 1
8 u.v.
[5] De todos os triângulos de perímetro fixado, determine o de maior área.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 231/407
8.3. PROBLEMAS DE OTIMIZAÇÃO 231
Sejam x, y e z os lados do triângulo. Usando a fórmula de Heron, o qua-drado da área do triângulo é: A2 = s (s−x) (s−y) (s−z ), onde 2 s = x+y+z .Maximizemos a função:
f (x, y) = s (s − x) (s − y) (x + y − s).
Determinemos os pontos críticos:
∂f
∂x = (s − y)(2s − 2x − y) = 0
∂f
∂y = (s − x)(2s − x − 2y) = 0;
como s = x e s = y , obtemos: x = 2s
3 e y =
2s
3 .
Por outro lado:
A(x, y) = −2 s (s − y),
∆(x, y) = −s2 (5 s2 − 8 s (x + y) + 4 (x2 + x y + y2)),
A2s
3 ,
2s
3
< 0, ∆2s
3 ,
2s
3
> 0;
logo, 2s
3 ,
2s
3 é ponto de máximo e z = 2s
3 . O triângulo é equilátero.
8.3.1 Mínimos Quadrados
Suponha que numa experiência realizada foram coletados os seguintes pa-res de dados (x1, y1), (x2, y2), . . ., (xn−1, yn−1), (xn, yn), tais que os xi não sãotodos iguais.A teoria subjacente à experiência sugere que os dados devem estar ao longode uma reta y = a x + b.Devido a erros experimentais, os pontos não são colineares. O método dos
mínimos quadrados consiste em determinar a reta que melhor se ajusta aosdados, ou seja, consiste em determinar a e b de modo que a soma dos desviosverticais seja mínima.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 232/407
232 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
xi
(x i ,yi)
Figura 8.24:
Dados os pontos (xi, yi), (1 ≤ i ≤ n) o ponto sobre a reta y = a x + b queestá mais próximo (distância vertical) dos pontos dados tem coordenadas(xi, a xi + b); logo o quadrado da distância vertical a estes pontos é:
E 2i = ((a xi + b) − yi)2, 1 ≤ i ≤ n.
Minimizaremos a função:
f (a, b) = E 21 + E 22 + . . . + E 2n =n
i=1
((a xi + b) − yi)2.
Calculando as derivadas parciais ∂f ∂a
, ∂f ∂b
e igualando a zero, obtemos o sis-tema:
an
i=1
x2i + b
ni=1
xi =n
i=1
xiyi
a
ni=1
xi + n b =
ni=1
yi.
Este é um sistema linear, que tem uma única solução que minimiza f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 233/407
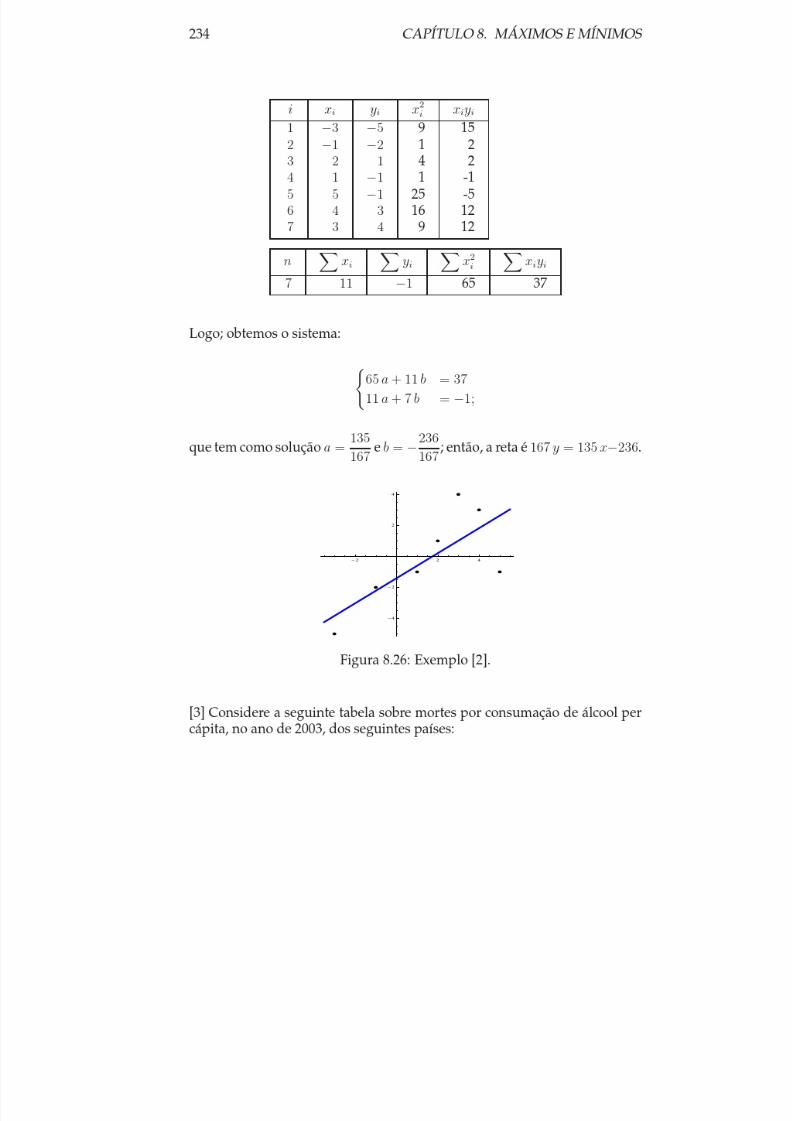
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 234/407

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 235/407
8.3. PROBLEMAS DE OTIMIZAÇÃO 235
País l/p MortesA 250 95B 300 120C 350 165
D 370 167E 400 170F 470 174
i) Suponha que existe uma correlação linear entre os dados da tabela e utilizeo método dos mínimos quadrados para determinar a reta de melhor ajusteà tabela.
ii) Se num país a consumação foi de 550 litros per cápita no ano de 2003,
utilizando i), determine a possível mortalidade.
i) Determinamos a reta que fica a menor distância vertical dos pontos:
(250, 95), (300, 120), (350, 165), (370, 167), (400, 170) e (470, 174).
n
xi
yi
x2
i
xiyi
6 2140 891 792800 329070
Logo, obtemos o sistema:
792800 a + 2140 b = 329070
2140 a + 6 b = 891,
que tem como solução a = 846
2215 e b =
10875
886 ; então, a reta é:
y = 846x
2215 +
10875
886 .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 236/407
236 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
100 200 300 400 500
100
150
200
Figura 8.27: Exemplo [3] i).
ii) Se x = 550,
y = 196995
886 ≃ 222.34.
8.4 Máximos e Mínimos Absolutos
Definição 8.3. Sejam f : A ⊂ Rn −→ R uma função e x0 ∈ A.
1. O ponto x0 é um ponto de mínimo absoluto de f em A se f (x0) ≤ f (x),para todo x ∈ A.
2. O ponto x0 é um ponto de máximo absoluto de f em A se f (x) ≤ f (x0),para todo x
∈A.
Exemplos 8.4.
[1] Seja f : R2 −→ R definida por f (x, y) = x2 + y2.
Como x2 + y2 ≥ 0 para todo (x, y) ∈ R2 e f (0, 0) = 0, temos que f (x, y) ≥f (0, 0) para todo (x, y) ∈ R2. Logo (0, 0) é ponto de mínimo absoluto de f .
[2] Seja f : R2 −→ R definida por f (x, y) = −
x2 + y2.
Como − x2 + y2 ≤ 0 para todo (x, y) ∈ R2 e f (0, 0 ) = 0, temos que ef (x, y) ≤ f (0, 0) para todo (x, y) ∈ A. Logo (0, 0) é ponto de máximo abso-luto de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 237/407
8.4. MÁXIMOS E MÍNIMOS ABSOLUTOS 237
Figura 8.28: Desenhos do exemplo [1] e [2], respectivamente.
Nos parágrafos anteriores estabelecemos condições para que um ponto sejaum ponto de máximo local (ou de mínimo local) de f . Agora nosso objetivoé verificar a existência de pontos de máximos e mínimos absolutos de f edeterminar tais pontos. Do Cálculo de uma variável conhecemos o teoremade Weierstrass que nos garante a existência de pontos extremos absolutos;no teorema, é fundamental que a função contínua a estudar esteja definidaem um intervalo fechado e limitado. A seguir daremos algumas definiçõesque estendem as características dos intervalos fechados e limitados a Rn eenunciaremos o teorema que garantirá a existência de máximos e mínimosabsolutos.
Definição 8.4. Um conjunto A ⊂ Rn é dito limitado se existe uma constantec > 0 tal que x ≤ c, para todo x ∈ A.
Equivalentemente, se A está contido na bola B(0, c). Lembramos que o con- junto A ⊂ Rn é fechado em Rn se ∂A ⊂ A. Veja o Capítulo III. Intuitiva-mente, uma superfície é fechada e limitada se ela separa o espaço em duasregiões, uma "interior"e outra "exterior"à supefície. É o caso de uma esferaem R3.
Exemplos 8.5.
[1] A = {(x,y,z ) ∈ R3/ x2 + y2 + z 2 ≤ r2, r > 0} é fechado, pois sua fronteiraé:
∂A = {(x,y,z ) ∈ R3/x2 + y2 + z 2 = r2, r > 0}.
Logo ∂A ⊂ A. Claramente A é limitado.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 238/407
238 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
[2] A = {(x, y) ∈ R2/ x2 + y2 < r2, r > 0} não é fechado, pois sua fronteira é:
∂A = {(x, y) ∈ R2/x2 + y2 = r2, r > 0}.
Logo ∂A ⊂ A. A é limitado
[3] A = [a, b] × [c, d] é um conjunto fechado e limitado, pois ∂A é o retânguloformado pelas retas x = a, x = b, y = c e y = d.
[4] Os planos em R3 são fechados e não limitados.
Teorema 8.4. (Weierstrass) Seja f : A ⊂ Rn −→ R uma função contínua noconjunto A fechado e limitado. Então, existem pontos de máximo e mínimoabsoluto de f em A, isto é, existem x0, x1 ∈ A tais que f (x0) ≤ f (x) ≤ f (x1)para todo x ∈ A.
Exemplos Importantes
[1] Sejam A = {(x, y) ∈ R2/x2 + y2 < 1} e f : A ⊂ R2 −→ R definida porf (x, y) = y .
i) f é diferenciável em R2; logo, é diferenciável em A; por outro lado∇f (x, y) = (0, 1); então, a função não possui pontos críticos e portanto nãopossui pontos extremos em A (nem em R2).
ii) Suponhamos que agora, f tome valores no conjunto:
B = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
O conjunto B é fechado e limitado; f é, claramente, contínua; o teorema deWeierstrass nos asegura a existência de pontos extremos absolutos de f emB.
iii) Por i) os pontos extremos de f devem estar em ∂B = {(x, y) ∈ R2/x2 +y2 = 1}. De fato, a função f associa a cada par ordenado sua ordenada;então:
−1 = f (0, −1) ≤ f (x, y) ≤ f (0, 1) = 1,
para todo (x, y) ∈ B. Logo (0, −1) e (0, 1) são pontos de mínimo e máximo
absolutos de f
em B
. Note que estes pontos não são pontos críticos
de f
.A seguir faremos algumas considerações geométricas sobre o exemplo, queserão importantes nos parágrafos seguintes. Consideremos g(x, y) = x2 +

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 239/407
8.4. MÁXIMOS E MÍNIMOS ABSOLUTOS 239
y2 − 1; então ∇g(x, y) = (2 x, 2 y); logo, não é difícil ver que os únicos pon-tos onde ∇g(x, y) e ∇f (x, y) são paralelos são os nos pontos de mínimo emáximo (0, −1) e (0, 1).
g(0,1)
∆g(0,-1)
∆
∆f(x,y)
-1
1
f=c
Figura 8.29: Mínimo e máximo de g.
Se um extremo absoluto de f ocorre em A − ∂A, então, também é um ex-tremo local de f ; logo, um extremo absoluto que não seja um extremo local,necessariamente está na ∂ A. Portanto, para determinar um extremo abso-luto, primeiramente determinamos os extremos locais e, então, compara-mos o maior e o menor desses valores com os valores de f ao longo da ∂A.Logo podem ocorrer pontos extremos de f na fronteira e estes extremosnão serem pontos críticos de f .
[2] Seja f : A ⊂ Rn −→ R uma função definida por f (x, y) = x2 + 2 x y −4 (x
−2 y), onde A = [0, 1]
×[0, 2]. O conjunto A é fechado e limitado e f
contínua; logo, f tem pontos de máximos e de mínimos absolutos. Pontoscríticos de f em A − ∂A:
∂f
∂x = 2 x + 2 y − 4 = 0
∂f
∂y = 2 x + 8 = 0,
(−4, 6) é o único ponto crítico de f e (−4, 6) /∈ A. Portanto, os pontos demáximo e mínimo de f são atingidos na ∂A.
Análise dos pontos da ∂ A: ∂ A = L1 ∪ L2 ∪ L3 ∪ L4, onde Li (1 ≤ i ≤ 4) sãoos lados do retângulo A:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 240/407
240 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
L
LL
1
2
3
4
L
A
Figura 8.30:
A função :
g(y) = f (1, y) = 10 y − 3; 0 ≤ y ≤ 2,
expressa f restrita a L2. O menor valor de g é atingido em y = 0 e o maiorvalor de g em y = 2. Portanto, (1, 0) é ponto de mínimo de f e (1, 2) é pontode máximo de f , quando restrita a L2. A função :
h(x) = f (x, 2) = x2 + 16; 0 ≤ x ≤,
representa f restrita a L3. (0, 2) é ponto de mínimo de f restrita a L3. Ana-logamente, A função f restrita a L1 e L4 tem pontos de máximo (0, 0) e(0, 2) respectivamente e pontos de mínimo (1, 0) e (0, 0) respectivamente.f (0, 0) = 0,f (1, 0) = −3, f (1, 2) = 17 e f (0, 2) = 16.
P f (P )
(1,0) −3(1,2) 17
(0,2) 16(0,0) 0
Conclusão: O valor máximo de f em A é 17 e é atingido no ponto (1, 2) e ovalor mínimo de f em A é −3 e é atingido no ponto (1, 0).
O método que estudaremos a seguir é devido a Lagrange e proporcionauma condição necessária para a existência de pontos extremos sujeitos auma restrição. Tais pontos extremos são ditos condicionados.
8.5 Método dos Multiplicadores de LagrangeAntes de apresentar o método, examinemos o seguinte exemplo:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 241/407
8.5. MÉTODO DOS MULTIPLICADORES DE LAGRANGE 241
Exemplos 8.3.
Determine os pontos extremos de f (x, y) = x2 + y2 tais que y = x + 1.
Considere a função g(x, y) = y − x − 1 e o conjunto de nível zero de g:
S ={
(x, y)∈R2/y
−x
−1 = 0
}.
O conjunto de nível S é uma reta passando por (−1, 0) e (0, 1). As curvas denível c de f são
x2 + y2 = c.
Para c > 0 são círculos concêntricos. Quanto menor a distância entre ascircunferências e a origem, menor será o valor de f . Desejamos encontrar ospontos extremos de f (x, y) quando (x, y) ∈ S , ou seja, devemos determinarqual a circunferência que intersectando S está a menor distância da origem.
Figura 8.31:
Observando o desenho vemos que a circunferência que tangencia a reta S éa que está mais próxima da origem. No ponto de tangência, o vetor normalà circunferência é também normal à reta S , logo, ∇f (x, y) = (2 x, 2 y) devese múltiplo de ∇g(x, y) = (−1, 1), ou seja, (2 x, 2 y) == λ(−1, 1), λ ∈ R. Equivalentemente:
2 x = −λ
2 y = λ;
resolvendo o sistema e como y = x + 1, obtemos as soluções:
x = −1
2 e y =
1
2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 242/407
242 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
Logo, ∇f (−1
2, 1
2) = ∇g(x, y). A função f (x, y) = x2 + y2 atinge seu menor
valor sobre a reta S no ponto− 1
2, 1
2
. De fato:
f (x, y) − f (−1
2, 1
2) = x2 + y2 − 1
2 = x2 + (x + 1)2 − 1
2 = 2 (x +
1
2)2 ≥ 0.
Figura 8.32:
8.6 Determinação dos Extremos Condicionados
Sejam f, g : A
⊂Rn
−→R funções diferenciáveis e A
⊂Rn um aberto. Para
determinar os pontos extremos de f restrito à condição g(x) = 0, formamosa combinação linear:
Φ(x) = f (x) + λ g(x)
onde λ ∈ R. Consideremos o sistema de n + 1 equações:
∂ Φ
∂xr(x) = 0 r = 1, 2,.....,n
g(x) = 0.
Note que ∂ Φ∂λ
(x) = g(x). Lagrange provou que a solução do problema éobtida resolvendo o sistema.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 243/407
8.6. DETERMINAÇÃO DOS EXTREMOS CONDICIONADOS 243
Teorema 8.5. Sejam f, g : A ⊂ Rn −→ R funções de classe C 1. Denotemospor S um conjunto de nível de g. Se f tem um ponto de máximo ou demínimo x0 ∈ S e ∇g(x0) = 0, então existe λ ∈ R tal que:
∇f (x0) = λ ∇g(x0)
Para a prova, veja o apêndice.
Interpretemos o teorema em R2. Suponha que desejamos determinar o valormáximo de f restrito às curvas de nível g(x, y) = 0. Façamos f (x, y) = ci,que representa para cada ci uma curva de nível de f . Se por exemplof (x, y) = c0 intersecta a curva g(x, y) = 0 transversalmente, isto é, de modoque, uma não seja tangente à outra ou, ∇f e ∇g sejam linarmente indepen-dentes no ponto de interseção, é possível verificar que para valores próxi-mos de c0 as curvas de nível de f continuam intersectando g(x, y) = 0.
g(x,y)<0
∆
∆
g(p)
f(p)
g(x,y)=0
p
f=c
f=c2
f=c1
Figura 8.33:
Então, procuramos o maior ci tal que f (x, y) = ci seja tangente a g(x, y) = 0num ponto (x0, y0). Em tal ponto as curvas de nível de f e g tem a mesmareta tangente e, portanto, a mesma reta normal, isto é, os vetores ∇f e ∇gdevem ser paralelos no ponto (x0, y0). Analogamente para n = 3. Do teo-rema anterior, segue que se f possui um ponto de máximo ou mínimo emx0 ∈ S c então ∇f (x0) é ortogonal a S c no ponto x0. O teorema nos diz quepara determinar os pontos extremos condicionados devemos resolver o se-guinte sistema de n + 1 equações e n + 1 incognitas:
∇f (x) = λ ∇g(x)
g(x) = c.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 244/407
244 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
Se n = 3, temos 4 equações:
∂f
∂x(x,y,z ) = λ
∂g
∂x(x,y,z )
∂f
∂y(x,y,z ) = λ
∂g
∂y(x,y,z )
∂f
∂z (x,y,z ) = λ
∂g
∂z (x,y,z )
g(x,y,z ) = c.
Analogamente para n = 2:
∂f
∂x(x, y) = λ
∂g
∂x(x, y)
∂f ∂y
(x, y) = λ ∂g∂y
(x, y)
g(x, y) = c.
A diferença entre os problemas de máximos e mínimos não condicionados eos condicionados é que nos últimos não temos critérios simples para distin-guir os pontos de mínimo dos de máximo. Cada ponto obtido pelo metódode Lagrange deve ser examinado separadamente, utilizando os dados doproblema e/ou, argumentos geométricos.
Exemplos 8.6.[1] Determine os pontos extremos da função f (x, y) = x y tais que x2+y2 = 1.
Utilizando o método de Lagrange, devemos resolver o sistema:∇f (x, y) = λ ∇g(x, y)
x2 + y2 = 1.
Logo,
(y, x) = λ (2 x, 2 y)
x2 + y2 = 1, que é equivalente a:
(1) y = 2 λ x
(2) x = 2 λ y
(3) x2 + y2 = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 245/407
8.6. DETERMINAÇÃO DOS EXTREMOS CONDICIONADOS 245
De (1) e (2) obtemos y (1 − 4 λ2) = 0. Se y = 0, utilizando (3), temos, x = ±1;
se λ = 1
2, temos, y = x; de (3), temos x = ± 1√
2e y = ± 1√
2. Por outro lado:
(x, y) f (x, y)
(±1, 0) 0
(
±1/
√ 2,
∓1/
√ 2)
−1/2
(±1/√ 2, ±1/√ 2) 1/2
Logo± 1√
2, ∓ 1√
2, −1
2
são pontos de mínimo e± 1√
2, ± 1√
2, 1
2
são pontos
de máximo.
-1 -0.5 0 0.5 1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
Figura 8.34: Exemplo [1].
[2] Determine os pontos extremos da função f (x, y) = x2 + 2 y2 tais quex2 + y2 ≤ 1.
Determinemos os pontos extremos da função f no conjunto fechado e limi-tado:
D = {(x, y) ∈ R2/g(x, y) ≤ 0}, onde g(x, y) = x2 + y2 − 1.
Se x2 + y2 < 1, ∇f (x, y) = (2 x, 4 y); logo, (0, 0) é o único ponto crítico de f .Se x2 + y2 = 1, por Lagrange, devemos resolver o sistema:
(2 x, 4 y) = λ (2 x, 2 y)
x2 + y2 = 1,
que é equivalente a: x = λ x
2 y = λ y
x2 + y2 = 1
, ou:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 246/407
246 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
(1) x (1 − λ) = 0
(2) y (2 − λ) = 0
(3) x2 + y2 = 1,
de (1), x = 0 ou λ = 1 e de (2) y = 0 ou λ = 2; de (3), x e y , não podemser ambos zero; logo, de (1) e (3) e de (2) e (3) obtemos os pontos (0,
±1),
(±1, 0).
Em x2 + y2 < 1, temos:
f (0, 0) = 0 ≤ x2 + 2 y2 = f (x, y).
Em x2 + y2 = 1, temos:
f (±1, 0) = 1, f (0, ±1) = 2;
então (0, 0) é ponto de mínimo e (0, ±1) são pontos de máximo.
Figura 8.35: Exemplo [2].
[3] Determine os pontos extremos da função f (x,y,z ) = x2 + y2 + z 2 tais que3 x − 2 y + z − 4 = 0.
Sejam:
g(x,y,z ) = 3 x − 2 y + z − 4, ∇f (x,y,z ) = (2 x, 2 y, 2 z )
e:
∇g(x,y,z ) = (3, −2, 1).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 247/407
8.6. DETERMINAÇÃO DOS EXTREMOS CONDICIONADOS 247
Devemos resolver o sistema:
∇f (x,y,z ) = λ ∇g(x,y,z )
3x − 2y + z − 4 = 0,
ou, equivalentemente,
(1) 2 x = 3λ
(2) 2 y = −2λ
(3) 2 z = λ
(4) 3 x −2y + z − 4 = 0.
Fazendo 3 × (1) − 2 × (2) + (3) e utilizando (4), obtemos
λ = 4
7, x =
6
7, y = −4
7, z =
2
7
e6
7, −4
7, 2
7
é o ponto extremo.
[4] Determine os pontos extremos da função f (x,y,z ) = x y z tais que:
x2 + y2
12 +
z 2
3 = 1.
Sejam:
g(x,y,z ) = x2 + y2
12 +
z 2
3 − 1,
∇f (x,y,z ) = (y z , x z , x y) e
∇g(x,y,z ) =
2 x, y
6, 2 z
3
.
Devemos resolver o sistema:
∇f (x,y,z ) = λ ∇g(x,y,z )
x2
+ y2
12 + z 2
3 = 1
ou, equivalentemente,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 248/407
248 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
(1) y z = 2 xλ
(2) x z = y
6λ
(3) x y = 2
3 zλ
(4) x2
+
y2
12 +
z 2
3 = 1;
multiplicando (1) por x, (2) por y e (3) por z obtemos:
(1′) x y z = 2 x2λ
(2′) x y z = y2
6 λ
(3′) x y z = 2
3z 2λ
(4) x2 + y2
12 +
z 2
3 = 1
somando (1′) + ( 2′) + ( 3′) e tendo em vista (4), temos 3 x y z = 2 λ (x2 + y2
12 +
z 2
3 ) = 2λ; substituindo x y z por
2λ
3 a em (1′), (2′) e (3′):
λ (3x2 − 1) = 0
λ (y2 − 4) = 0
λ (z 2 − 1) = 0
Se λ = 0, x = ±√ 33 , y = ±2 e z = ±1. Se λ = 0, x, y e z podem ser nulos aos
pares: x = y = 0 e z = ±√ 3, x = z = 0 e y = ±2
√ 3, y = z = 0 e x = ±1. Os
pontos extremos de f são:
(±√
3
3 , ±2, ±1), (0, 0, ±
√ 3), (0, ±2
√ 3, 0) e (±1, 0, 0).
(x,y,z ) f (x,y,z ) Ponto
(√ 3/3, 2, 1) 2√ 3/3 máximo(−
√ 3/3, −2, −1) −2
√ 3/3 mínimo

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 249/407
8.7. PROBLEMAS DE OTIMIZAÇÃO 249
8.7 Problemas de Otimização
[1] De todos os paralelepípedos retangulares cuja soma das arestas é cons-tante e igual a 4 a (a > 0), qual é o que tem volume máximo?
Sejam x, y e z as arestas do paralelepípedo; seu volume é V (x,y,z ) = x y z tal que x + y + z = a. Seja g(x,y,z ) = x + y + z .
∇V (x,y,z ) = λ ∇g(x,y,z )
g(x,y,z ) = a,
ou, equivalentemente:
(1) y z = λ
(2) x z = λ
(3) x y = λ
(4) x + y + z = a.
Fazendo (1) = (2) obtemos x = y e fazendo (2) = (3) obtemos y = z ; logo,x = y = z ; de (4), temos x = y = z =
a
3 e:
V a
3, a
3, a
3
=
a3
27
é o volume máximo.
[2] Determine as dimensões do paralelepípedo retangular de volume má-ximo sabendo que as 3 faces do paralelepípedo estão nos planos coordena-dos e um vértice pertence ao plano
x
a
+ y
b
+ z
c
= 1 (a, b, c > 0). Calcule o
volume.O volume é V (x,y,z ) = x y z . Seja g(x,y,z ) =
x
a +
y
b +
z
c − 1; então,
∇V (x,y,z ) = λ ∇g(x,y,z )x
a +
y
b +
z
c = 1,
ou, equivalentemente,
(1) a y z = λ
(2) b x z = λ
(3) c x y = λ
(4) x
a +
y
b +
z
c = 1;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 250/407
250 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
fazendo (1) = (2), como x, y, z = 0, temos y = b x
a ; analogamente, fazendo
(1) = (3), temos z = c x
a , de (4) obtemos que x =
a
3, y =
b
3 e z =
c
3. O ponto
de máximo é 1
3 (a,b,c) e:
V = V a
3 , b
3 , c
3
= a b c
27 .
[3] Determine a distância mínima entre a superfície 4 x2 + y2 − z = 0 e oponto (0, 0, 8).
Como antes utilizamos o quadrado da distância: f (x,y,z ) = x2+y2+(z −8)2.Consideramos g(x,y,z ) = 4x2 + y2 − z ; então,
(1) 2 x = 8 λ x
(2) 2 y = 2 λ y
(3) 2 (z − 8) = −λ
(4) 4 x2 + y2 = z,
ou, equivalentemente,
(1) x (1 − 4λ) = 0
(2) y (1 − λ) = 0
(3) 2 (z − 8) = −λ
(4) 4x2 + y2 = z ;
temos: x = 0 e λ = 1; y = 0 e λ = 14
; x = 0 e y = 0.
Se x = 0 e λ = 1, de (3) temos z = 15
2 ; de (4) temos y = ±
15
2 ; logo,
obtemos os pontos
0, ±
15
2 ,
15
2
.
Se y = 0 e λ = 1
4, de (3) temos z =
63
8 ; de (4) temos x = ±3
√ 14
8 ; logo,
obtemos os pontos ± 3
√ 14
8
, 0, 63
8.
Se x = 0 e y = 0 de (4), obtemos z = 0 e λ = 16; logo, obtemos o ponto(0, 0, 0).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 251/407
8.7. PROBLEMAS DE OTIMIZAÇÃO 251
(x,y,z ) f (x,y,z ) Ponto
(0, 0, 0) 64
(0,
± 15/2, 15/2) 31/4
(±3√
14/8, 0, 63/8) 127/64 mínimo
A distância mínima é 1.4 u.m. (u.m.=unidades de medida); os pontos:
± 3√
14
8 , 0,
63
8
são de mínimo.
[4] Se a temperatura sobre uma esfera de raio 1 é dada por T (x,y,z ) = xz +yz , determine os pontos em que a temperatura é mais baixa e os pontos emque a temperatura é mais alta.
Seja g(x,y,z ) = x2 + y2 + z 2 − 1; então,
(1) z = 2 λ x
(2) z = 2 λ y
(3) (x + y) = 2 λ z
(4) x
2
+ y
2
+ z
2
= 1,
Fazendo (1) + (2) e substituindo em (3), obtemos z (2λ2 − 1) = 0 e z = 0 ou
λ = ±√
2
2 .
Se z = 0, de (1) e (2) temos x = y = 0, o que é impossível, ou λ = 0; de (3),
obtemos x = −y e de (4), y = ∓√
2
2 ; logo, √
2
2 , −
√ 2
2 , 0
e − √
2
2 ,
√ 2
2 , 0
são pontos extremos.
Se λ = ±√
2
2 , de (1) e (2) temos x = y e de (3), z = ±√ 2x; de (4), obtemos
x = y = ±1
2 e z = ±
√ 2
2 ; logo± 1
2, ±1
2, ±
√ 2
2
são pontos extremos.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 252/407
252 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
(x,y,z ) T (x,y,z ) Temperatura
(±1/2, ±1, 2, ±√
2/2)√
2/2 máxima
(
±
√ 2/2,
∓
√ 2/2, 0) 0 mínima
[5] Se a densidade na placa x y + x z + y z = a, (x, y, z = 0) é dada porD(x,y,z ) = x y z , determine os pontos da placa onde a densidade é máximae onde é mínima.
Seja g(x,y,z ) = x y + x z + y z − a:
(1) y z = λ (y + z )
(2) x z = λ (x + z )
(3) x y = λ (x + y)
(4) x y + x z + y z = a;
multiplicando (1) por x, (2) por y, (3) por z e somando, temos:
3 x y z = λ(2 x y + 2 x z + 2 y z ) = 2 a λ,
onde, na última igualdade utilizamos (4); substituindo λ por 3 x y z
2a no sis-
tema, obtemos:
(1) 3 x (y + z ) = 2 a
(2) 3 y (x + z ) = 2 a
(3) 3 z (x + y) = 2 a.
Igualando (1) a (2) obtemos x = y e igualando (2) a (3) obtemos z = y;
logo x = y = z ; de (4) temos x = ±
a
3 e os pontos extremos são: ±
a
3, ±
a
3, ±
a
3
.
(x,y,z ) D(x,y,z ) Densidade
( a/3, a/3, a/3) a√
3a/9 máxima
(−
a/3, −
a/3, −
a/3) −a√
3a/9 mínima

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 253/407
8.7. PROBLEMAS DE OTIMIZAÇÃO 253
[6] Determine a equação do elipsóide x2
a2 +
y2
b2 +
z 2
c2 = 1 que passa pelo
ponto (1, 2, 3) e tem menor volume.
Note que as incógnitas são a, b e c. Seja V = f (a,b,c) = 4a b c π3
o volume doelipsóide. Como o ponto (1, 2, 3) pertence à superfície:
1
a2 +
4
b2 +
9
c2 = 1;
logo, consideramos g(a,b,c) = 1
a2 +
4
b2 +
9
c2 − 1; então,
(1) 4 π
3 a b c = − 2
a2 λ
(2) 4 π
3 a b c = − 8
b2 λ
(3) 4 π
3 a b c =
−18
c2 λ
(4) 1
a2 +
4
b2 +
9
c2 = 1,
fazendo (1) = (2) e como λ = 0, obtemos que b2 = 4 a2; fazendo (2) = (3),obtemos 4 c2 = 9 b2; logo, c2 = 9 a2 e de (4): a2 = 3, b2 = 12 e c2 = 27; aequação do elipsóide é:
x2
3 +
y2
12 +
z 2
27 = 1.
[7] Um depósito cilíndrico de aço fechado deve conter 2 litros de um fluido.Determine as dimensões do depósito de modo que a quantidade de materialusada em sua construção seja mínima.
Sejam x e y o raio e a altura do cilindro, respectivamente. Devemos minimi-zar a área total do cilindro, incluindo as tampas:
f (x, y) = 2 π x2 + 2 π x y , sendo π x2 y = 2.
Denote por g(x, y) = πx2y − 2, ∇f (x, y) = (4πx + 2πy, 2πx) e ∇g(x, y) =(2πxy,πx2). O sistema é:
(1) 2 x + y = λ x y
(2) 2 x = λ x2
(3) π x2 y = 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 254/407
254 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
De (2), x(2 − λx) = 0 e λx = 2; logo, de (1), y = 2x; ou seja, a altura éigual ao diâmetro da base; de (3) obtemos: x = π− 1
3 e y = 2π−13 , que são as
coordenadas do ponto de mínimo (por que ?). f (π−13 , 2π−
13 ) = 6 3
√ π.
[8] Um fio de cobre de comprimento a, deve ser dividido em 3 partes tais queo produto dos comprimentos das partes seja máximo. Determine o produto.
Se x, y e z são os comprimentos das partes, então devemos maximizarf (x,y,z ) = x y z tal que x + y + z = a. O sistema é:
(1) y z = λ
(2) x z = λ
(3) x y = λ
(4) x + y + z = a.
Fazendo (1) = (2) e (2) = (3), obtemos x = y = z ; de (4) x = a
3 = y = z ;
( a3
, a3
, a3
) é o ponto de máximo e f (a3
, a3
, a3
) = a3
27.
[9] Determine os pontos da curva x6 + y6 = 1 mais afastados e os maispróximos da origem.
Novamente utilizamos o quadrado da distância da origem ao ponto (x, y);isto é, f (x, y) = x2 + y2, sendo x6 + y6 = 1. Seja g(x, y) = x6 + y6 − 1. Osistema é:
(1) x = 3 λ x5
(2) y = 3 λ y5
(3) x6 + y6 = 1,
ou, equivalentemente,
(1) x (1 − 3λx4) = 0
(2) y (1 − 3λy4) = 0
(3) x6 + y6 = 1.
Se x = 0, de (3) obtemos y =
±1 e em (2), λ =
1
3
; se y = 0, de (3) obtemos
x = ±1 e em (1), λ = 13
; os pontos são (±1, 0) e (0, ±1). Se x, y = 0, o sistemafica:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 255/407
8.7. PROBLEMAS DE OTIMIZAÇÃO 255
(1) (1 − 3λx4) = 0
(2) (1 − 3λy4) = 0
(3) x6 + y6 = 1.
Fazendo (2)-(1), λ(x4 − y4) = 0, λ = 0 e y = ±x; de (3) obtemos:
2−1/6, 2−1/6
,
2−1/6, −2−1/6
, − 2−1/6, 2−1/6
e − 2−1/6, −2−1/6
,
onde λ = 2
23
3 .
(x, y) f (x, y) Ponto
(±1, 0) 1 mínimo
(0,
±1) 1 mínimo
2−1/6, 2−1/6
22/3 máximo
2−1/6, −2−1/6
22/3 máximo
− 2−1/6, 2−1/6
22/3 máximo
− 2−1/6, −2−1/6
22/3 máximo
-1 -0.5 0.5 1
-1
-0.5
0.5
1
Figura 8.36:
O método de Lagrange não é restrito a duas ou três variáveis. O métodosó depende de uma função e uma restrição. É o que mostrará o exemplo aseguir.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 256/407
256 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
[10] Determine o valor máximo da raiz n-ésima de um produto de n núme-ros positivos tal que a soma dos números seja constante. Conclua que
n√
x1 x2 .......... xn ≤ 1
n
ni=1
xi.
Sejam x = (x1, x2, x3, ........., xn), onde, xi > 0 para todo i = 1, 2.......n, e :
f (x) = n√
x1 x2 .......... xn,
tal que: x1 + x2 + x3 + ....... + xn = a. Denotando por g(x) = x1 + x2 + x3 +....... + xn − a, então, ∇g(x) = (1, 1, 1, ......, 1).
Cálculo do gradiente de f : Se denotamos f (x) = n
u(x) onde u(x) =x1 x2 . . . . xn, então:
∂f
∂xi=
∂u∂xi
n(u(x))n−1n
= x1 x2 ...xi−1 xi+1 ...xn
n(u(x))n−1n
;
para não escrever demais, denote por K (x) = n(u(x))n−1
n ; o sistema é:
x2 x3 ...xn = λK (x) (1)
x1 x3 ...xn = λK (x) (2)
x1 x2 x4 ...xn = λK (x) (3)
. .
. .
. .
. .
. .x1 x3 ...xn−2 xn = λK (x) (n − 1)
x1 x3 ...xn−2 xn−1 = λK (x) (n)
x1 + x2 + x3 + ....... + xn = a (n + 1).
Fazendo (1) = (2), temos x1 = x2; de (2) = (3), x2 = x3; assim, em geral,igualando as equações ( j) = ( j + 1) com j = 1,...,n − 1, obtemos x j = x j+1 ex1 = x2 = x3 = .... = xn; usando a equação (n + 1) temos:
x1 = x2 = x3 = ...... = xn = a
n,
e f (an ,
an , .....,
an ) =
an que é o valor máximo. Em particular,
f (x) ≤ f (a
n, a
n, .....,
a
n) =
a
n;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 257/407
8.7. PROBLEMAS DE OTIMIZAÇÃO 257
por outro lado, a =n
i=1
xi; portanto:
n√
x1 x2 .......... xn ≤ 1
n
ni=1
xi.
8.7.1 Generalização do MétodoSeja S um conjunto de nível definido por:
g1(x0) = c1
g2(x0) = c2
g3(x0) = c3
. .
. .
. .
gk(x0) = ck.
S é, em geral, interseção de superfícies. O teorema pode ser generalizadoda seguinte forma: Se f tem um ponto de máximo ou mínimo em x0 ∈ S i,para todo i, então, devem existir constantes λ1, λ2 ...... λk tais que:
∇f (x0) = λ1∇g1(x0) + λ2∇g2(x0) + ........... + λk∇gk(x0).
Devemos resolver o sistema:
∇f (x0) = λ1∇g1(x0) + λ2∇g2(x0) + ........... + λk∇gk(x0)
g1(x0) = c1g2(x0) = c2
g3(x0) = c3
. .
. .
. .
gk(x0) = ck.
Exemplos 8.4.
[1] Determine o ponto da interseção dos planos x+y +z = 1 e 3x+2y +z = 6mais próximo da origem.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 258/407
258 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
Sejam f (x,y,z ) = x2 + y2 + z 2, g1(x,y,z ) = x + y + z − 1 e g2(x,y,z ) =3x + 2y + z − 6; temos:
2 x = λ1 + 3 λ2 (1)
2 y = λ1 + 2 λ2 (2)
2 z = λ1 + λ2 (3)x + y = 1 − z (4)
3x + 2y = 6 − z, (5)
fazendo (1) + (2) + (3) obtemos, usando (4) e (5), o seguinte sistema:
3 λ1 + 6 λ2 = 2
3 λ1 + 8 λ2 = 10;
logo λ2 = 4 e λ1 = −22
3 e x =
7
3, y =
1
3 e z = −5
3. A distância é:
5√
3
3 .
8.8 Método de Lagrange e Álgebra Linear
Utilizamos o Método dos Multiplicadores de Lagrange para determinar oscandiadatos a pontos extremos de uma função f : A ⊂ Rn −→ R, de classeC 1, restrita ao conjunto:
B = {u ∈ A / g(u) = k},
onde g : A ⊂ Rn −→ R é uma função de classe C 1.
Não é difícil ver que uma curva de nível de f é tangente a uma curva denível de g, no ponto p ∈ A, se e somente se ∇f ( p) é paralelo a ∇g( p), se∇g( p) = 0:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 259/407
8.8. MÉTODO DE LAGRANGE E ÁLGEBRA LINEAR 259
g=c
g=d
f=k
g=r
Figura 8.37: Curvas de níveis de f e g, respectivamente.
Isto é, existe λ ∈ R tal que:
∇f ( p) = λ
∇g( p).
Assim, para determinar os pontos extremos, devemos resolver o sistema:
(1)
∇f ( p) = λ ∇g( p)
g(u) = k.
De forma análoga podemos estender o problema de determinar os candia-datos a pontos extremos de uma função f : A ⊂ Rn −→ R de classe C 1,restrita ao conjunto:
B =
{u
∈A / g(u) = k1, h(u) = k2
},
onde g, h : A ⊂ Rn −→ R, são funções de classe C 1.
Se ∇g(u)×∇h(u) = 0, para todo u ∈ B, então o ponto p ∈ B é ponto extremode f , se {∇f ( p), ∇g( p), ∇h( p)} é um conjunto ld. Logo, existem λ, µ ∈ R taisque:
∇f ( p) = λ ∇g( p) + µ ∇h( p),
Assim, para determinar os pontos extremos, devemos resolver o sistema:
(2) ∇f ( p) = λ ∇g( p) + µ ∇h( p)
g(u) = k1
h(u) = k2

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 260/407
260 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
g=d
h=k
f=c
p
Figura 8.38: Curvas de níveis de f e g, respectivamente.
8.9 Eliminação do Parâmetro
Os parâmtros λ e µ nos sistemas (1) e (2) do parágrafo anterior, são essenci-almente utilizados para ter consistência e assim poder determinar suas pos-síveis soluções. Por outro lado, os valores dos parâmetros não são impor-tantes no problema que desejamos resolver, portanto não tem um interesseprático para serem determinados.
Dependendo do problema,muitas vezes é preferível eliminar os parâmetrosdos sistemas (1) e (2). A forma de eliminar os parâmetros é trivial, para isto
basta utilizar Álgebra Linear básica.
Se n = 2, os vetores ∇f ( p) e ∇g( p) são ld. se, e somente se o determinanteda matriz:
M =
∂f
∂x
∂f
∂y
∂g
∂x
∂g
∂y
é nulo, onde as derivada parciais são calculadas em (x, y) ∈ A. Assim, emvez de resolver o sistema (1), resolvemos o sistema:
(1′) det(M ) = 0
g(x, y) = 0
No caso n = 3, com uma restrição, podemos eliminar trivialmente o parâ-metro λ do sistema. Fazendo:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 261/407
8.9. ELIMINAÇÃO DO PARÂMETRO 261
M =
i j j
∂f
∂x
∂f
∂y
∂f
∂z
∂g
∂x
∂g
∂y
∂g
∂z
onde as derivada parciais são calculadas em (x,y,z ) ∈ A. Como antes, emvez de resolver o sistema (1), resolvemos o sistema:
(1′′)
det(M ) = 0
g(x,y,z ) = c
No caso n = 3, com duas restrições, podemos eliminar trivialmente os parâ-metros λ e µ do sistema. Fazendo:
M =
∂f ∂x
∂f ∂y
∂f ∂z
∂g
∂x
∂g
∂y
∂g
∂z
∂h
∂x
∂h
∂y
∂h
∂z
onde as derivada parciais são calculadas em (x,y,z ) ∈ A. Como antes, emvez de resolver o sistema (2), resolvemos o sistema:
(2′)
det(M ) = 0
g(x,y,z ) = k1
h(x,y,z ) = k2
Finalmente, a eliminação dos parâmetros pode ser estendida, de forma to-talmente análoga às anteriores, a n restrição, pois sempre teremos que, se
p ∈ B é um ponto extremo de f , então o conjunto:
{∇f ( p), ∇g1( p), ∇g2( p), . . . , ∇gn( p)}
é um conjunto ld.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 262/407

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 263/407
8.9. ELIMINAÇÃO DO PARÂMETRO 263
M =
i j k
2 x 2 y 2 z
x
32
y
18
2 z
25
Logo:
det(M ) =11 y z
225
i − 39 x z
400
j +7 x y
144
k
Devemos resolver o sistema:
y z = 0
x z = 0
x y = 0x2
64 +
y2
36 +
z 2
25 = 1
o qual pode ser resolvido facilmente. Os pontos candidatos a pontos extre-mos são:
(0, 0, ±5), (0, ±6, 0), (±8, 0, 0).
Logo:
f (0, 0, ±5) = 25,
f (0, ±6, 0) = 36
f (0, 0, ±8) = 64.Então:
Os pontos 0, 0, 5) e (0, 0, −5) são de mínimo.
Os pontos (8, 0, 0) e (−8, 0, 0) são de máximo.
[3] Determine os pontos extremos de f (x,y,z ) = x3 + y3 + z 3, sujeitos àsseguintes condições x2 + y2 + z 2 = 1 e x + y + z = 1.
Sejam g(x,y,z ) = x2 + y2 + z 2 − 1 e h(x,y,z ) = x + y + z − 1, então:
M =
3 x2 3 y2 3 z 2
2 x 2 y 2 z
1 1 1

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 264/407
264 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
Logo:
det(M ) = 6 x2y − 6 x2z + 6 xz 2 − 6 xy2 + 6 y2z − 6 yz 2
= (6 y − 6 z ) x2 +
6 z 2 − 6 y2
x + 6 y2z − 6 yz 2,
fatorando, temos que:
det(M ) = 6 (y − z ) (x − z ) (x − y) .
Devemos resolver o sistema:
(y − z ) (x − z ) (x − y) = 0
x2 + y2 + z 2 = 1
x + y + z = 1,
o qual pode ser resolvido facilmente,. Os pontos candidatos a pontos extre-
mos são:
(1, 0, 0), (0, 1, 0), (0, 0, 1), (−1
3, 2
3, 2
3), (
2
3, −1
3, 2
3), (
2
3, 2
3, −1
3).
Logo:
f (1, 0, 0) = f (0, 1, 0) = f (0, 0, 1) = 1,
f (−1
3, 2
3, 2
3) = f (
2
3, −1
3, 2
3) = f (
2
3, 2
3, −1
3) =
5
9.
Então:Os pontos (1, 0, 0), (0, 1, 0) e (0, 0, 1) são de máximo.
Os pontos (−1
3, 2
3, 2
3), (
2
3, −1
3, 2
3) e (
2
3, 2
3, −1
3) são de mínimo.
Note que o sistema original sería:
3 x2 = 2 x λ + µ
3 y2 = 2 y λ + µ
3 x2 = 2 z λ + µ
x2 + y2 + z 2 = 1x + y + z = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 265/407
8.10. EXERCÍCIOS 265
8.10 Exercícios
1. Determine os pontos críticos de:
(a) z = e1+x2+y2
(b) z = 3x2 + 2xy + 2x + y2 + y + 4
(c) z = (x2 − 1) (y2 − 4)
(d) z = x2y − 8 x − 4 y
(e) z = 1
x − 64
y + xy
(f) z = 1
x2 + y2 + 1
(g) z = 2 x + 2 y + 1
x2 + y2 + 1
(h) z = x5 + y5 − 5x − 5y
(i) z = x2
−4 x y + y2 + 1
(j) z = x4 + x y + y2 − 6 x − 5 y
(k) z = 3 x2 + x y − y2 + 1
(l) w = log4(x2 + y2 + z 2 + 1)
(m) w = x2 + y3 + z 4
(n) w =
x2 + y2 + z 2
2. Determine se a origem é ponto de mínimo, de máximo ou sela de:
(a) z = x2.(b) z = x2 − 4y2
(c) z = −x2 + 2xy − y2
(d) z = x4 + y4
(e) z = x3 + y3
(f) z = 4xy − 3x2 + 4y2
(g) z = 2x2 + y2
−3xy
(h) z = 5x2 + y2 − 4xy
(i) z = x2 − y2 + 6xy
(j) z = −x2 + y2 − xy
(k) z = xy
4 − x2 − y2
2
(l) z = 7y2
−xy
3. Classifique os pontos críticos de:
(a) z = e1+x2+y2
(b) z = 3x2 + 2xy + 2x + y2 + y
(c) z = (x2 − 1)(y2 − 4)
(d) z = x2y − 8x − 4y
(e) z = 1
x − 64
y + xy
(f) z = 1
x2 + y2 + 1
(g) z = 2x + 2y + 1
x2 + y2 + 1
(h) z = x5 + y5 − 5x − 5y
(i) z = x2−4xy + 4y2−x + 3y + 1
(j) z = x4 + xy + y2 − 6x − 5y
(k) z = (x−
2)2 + (y−
3)2
(l) z = x − y2 − x3
(m) z = x2 + y3

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 266/407
266 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
(n) z = 3x4 − 4x2y + y2
(o) z = x2 + y2 + x y + x
(p) z = 1 + x2 + y2
(q) z = 1 + x2 − y2
(r) z = x3 + 3 x2 + 4 x y + y2
(s) z = x2
y2
(1 − x − y)
(t) z = x y − ln(x2 + y2)
(u) z = 2 − (x + 2)2 + (y + 1)2
(v) z = (x − 1)2 + 2 (y + 2)2 + 3
(w) z = ey + ex − ex+y
(x) z = x sen(y), 0 ≤ x, y ≤ π.
4. Determine a reta que melhor se ajusta aos seguintes pontos:
(a) (0, 0), (1, 1) e (2, 3).
(b) (0, 0), (1
2, 1
4), (1, 1), (
3
2, 9
2) e (2, 4).
(c) (−2, −4), (−1, −2), (1, 1), (2, 3), (4, 2) e (3, 5).
(d) (−5, −4), (−3, −2), (−1, −1), (0, 0), (1, 1), (2, 3), (4, 2) e (3, 5).
5. Calcule os pontos de z 2 − xy = 1 mais próximos da origem.
6. Determine a menor distância de x2 − 4y = 0 ao ponto (0, b).
7. Determine o valor máximo do produto de três numeros positivos taisque
2 x y + x z + 3 y z = 72.
8. Determine a distância mínima entre 4x2 + 4y − z = 0 e o ponto (0, 0, 8).
9. Se os vértices de um triângulo são (0, 0), (2, 1) e (1, 3), determine oponto P do triângulo tal que a soma dos quadrados das distâncias aosvértices seja mínima.
10. Determine as dimensões do paralelepípedo de volume máximo, comlados paralelos aos eixos coordenados, inscrito no elipsóide:
x2
a2 +
y2
b2 +
z 2
c2 = 1.
11. Ache a equação do plano que passa por (1, 2, 1) e forma com os planoscoordenados o tetraedro de volume mínimo.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 267/407
8.10. EXERCÍCIOS 267
12. Uma calha deve ser construída com uma folha de aço, de largura a ecomprimento b. Se a seção da calha é um trapézio isósceles, qual deveser a largura da base e a inclinação das faces para que sua capacidadeseja máxima?
13. Uma aplicação num doente de x miligramas de um remédio A e y mi-ligramas de um medicamento B ocasiona uma resposta R = R(x, y) =x2 y3 (c − x − y), (c > 0). Que quantidade de cada remédio dará amelhor resposta?
Multiplicadores de Lagrange
1. Determine os pontos extremos de:
(a) z = 25 − x2 − y2 tais que x2 + y2 − 4 y = 0.
(b) z = x2 + 2 x y + y2 tais que x − y = 3.
(c) z = 4 x2 + 2 y2 + 5 tais que x2 + y2 − 2 y = 0.(d) w = x2 + y2 + z 2 tais que 3 x − 2 y + z − 4 = 0.
(e) w = x + y + z tais que x2 − y2 + z 2 = 4.
(f) w = (x + y + z )2 tais que x2 + 2 y2 + 3 z 2 = 1.
2. Determine os pontos extremos de: w = x2 + y2 + z 2 tais que:
x2 + y2 + z 2 ≤ 1.
3. Determine a menor distância de y = x2 ao ponto (0, b), b > 0.
4. Determine o maior e o menor valor de xy tal que 2 x + y = 2, x e ypositivos.
5. Determine o maior e o menor valor de x2 + y2 tal que x4 + y4 = 1.
6. Determine o maior valor de 2 y − x tal que y = sen(x), 0 ≤ x ≤ 2π.
7. Determine os valores máximos e mínimos de f (x,y,z ) = x + 2 y + z se
x2 + y2 = 1 e y + z = 1.
8. Seja 0 < p < q . Determine o máximo e mínimo de x p + y p + z p tal quexq + yq + z q = 1, x, y e z não negativos.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 268/407
268 CAPÍTULO 8. MÁXIMOS E MÍNIMOS
9. Determine os valores extremos de z = cos2(x) + cos2(y) se 4x + 4y = π.
10. Determine as dimensões do retângulo de menor perímetro e de área16 cm2.
11. De todos os triângulos de perímetro fixo, determine o de maior área.
12. Determine o valor máximo de:
(a) f (x,y,z ) = x + y + z tal que x2 + y2 + z 2 = a2 e conclua que:
(x + y + z )2 ≤ 3 (x2 + y2 + z 2).
(b) f (x,y,z ) = x y z tal que x + y + x = s e conclua que: 3 3√
xyz ≤x + y + z .
(c) f (x,y,z ) = x y z tal que x2 +y2+z 2 = s, x, y e z positivos; concluaque:
3√
x y z ≤
x2 + y2 + z 2
3 .
13. Se a temperatura em qualquer ponto (x,y,z ) do espaço é dada por:
T (x,y,z ) = 100 x2 y z,
determine a temperatura máxima e a temperatura mínima sobre x2 +
y2
+ z 2
≤ 4.
14. Determine o ponto P na elipse x2+2 y2 = 6 eoponto Q na reta x+y = 4tal que a distância de P a Q seja a menor possível.
15. Determine os pontos mais afastados da origem tais que x2 +4 y2 +z 2 =4 e x + y + z = 1.
16. Determine as dimensões do paralelepípedo retangular de área total2 a2 cuja diagonal seja mínima.
17. Dentre todos os triângulos de área S determine o que tem o perímetromenor.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 269/407
8.10. EXERCÍCIOS 269
18. Determine as dimensões do cilindro de maior volume inscrito numaesfera de raio R.
19. Dentre todos os triângulos retângulos de área S determine o que temhipotenusa mínima.
20. Determine o maior produto que podem ter 10 números positivos se asoma é 10 k, k ∈ N.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 270/407
270 CAPÍTULO 8. MÁXIMOS E MÍNIMOS

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 271/407
Capítulo 9
INTEGRAÇÃO DUPLA
9.1 Integração Dupla sobre Retângulos
Denotemos por:
R = [a, b] × [c, d] = {(x, y) ∈ R2/a ≤ x ≤ b, c ≤ y ≤ d}um retângulo em R2.
Consideremos P 1 = {x0, x1,....,xn} e P 2 = {y0, y1,....,yn} partições de or-dem n de [a, b] e [c, d] respectivamente, tais que:
a = x0 < x1 < . . . . . . < xn = b e c = y0 < y1 < . . . . . . < yn = d
e xi+1 − xi = b − a
n , y j+1 − y j =
d − c
n .
a b
c
d
x x
R
i i+1
y j+1
y j
Rij
Figura 9.1: Partição de R.
O conjunto P 1 × P 2 é denominada partição do retângulo R de ordem n.
271

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 272/407
272 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Sejam os n2 sub-retângulos Rij = [xi, xi+1] × [y j, y j+1] e cij ∈ Rij arbitrário(i, j = 0,....,n − 1). Considere a função limitada f : R −→ R. A soma
S n =n−1i=0
n−1 j=0
f (cij) ∆x ∆y,
onde ∆x =
b
−a
n e ∆y =
d
−c
n é dita soma de Riemann de f sobre R.Definição 9.1. Uma função f : R −→ R limitada é integrável sobre R se
limn→+∞
S n,
existe independente da escolha de cij ∈ Rij e da partição; em tal caso deno-tamos este limite por:
R
f (x, y) dxdy,
que é denominada integral dupla de f sobre R.Teorema 9.1. Toda f : R −→ R contínua é integrável.
A prova deste teorema pode ser vista em [EL].
9.2 Significado Geométrico da Integral Dupla
Se f é contínua e f (x, y) ≥ 0 para todo (x, y) ∈ R, a existência da integraldupla de f sobre R tem um significado geométrico direto. Consideramos osólido W
⊂R3 definido por:
W = {(x,y,z ) ∈ R3 / a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f (x, y)}
Figura 9.2: O sólido W .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 273/407
9.2. SIGNIFICADO GEOMÉTRICO DA INTEGRAL DUPLA 273
W é fechado e limitado superiormente pelo gráfico de z = f (x, y), inferi-ormente por R e lateralmente pelos planos x = a, x = b, y = c, y = d. Sedenotamos por V (W ) o volume de W , então:
V (W ) =
R
f (x, y) dxdy
De fato, escolhendo cij como o ponto onde f atinge seu máximo sobre Rij
(pois R é fechado, limitado e f é contínua), então f (cij )×∆x×∆y é o volumedo paralelepípedo de base Rij e altura f (cij).
Figura 9.3: Partição e os paralelepípedos de W , respectivamente.
S n =
n−1i=0
n−1 j=0
f (cij ) ∆x ∆y
é o volume do sólido circunscrito a W . Analogamente se eij é o ponto ondef atinge seu mínimo sobre Rij (pois R é fechado, limitado e f é contínua),então:
sn =n−1i=0
n−1 j=0
f (eij) ∆x ∆y
é o volume do sólido inscrito em W . Como f é integrável, os limites dassomas de Riemann S n e sn independem da escolha de cij e eij :
limn→∞
S n = limn→∞
sn =
R
f (x, y) dxdy.
Em outras palavras os volumes dos sólidos inscritos e circunscritos a W ,tendem ao mesmo limite. Portanto, é razoável chamar este limite de volumede W .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 274/407
274 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Figura 9.4: Reconstrução do sólido.
Figura 9.5: Reconstrução do sólido.
Figura 9.6: Reconstrução do sólido.
Novamente notamos que é possível mostrar rigorosamente que o signifi-cado geométrico da integral dupla independe da escolha da partição e dospontos cij e eij .
A integral dupla tem propriedades análogas às das integrais das funções deuma variável.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 275/407
9.3. INTEGRAIS ITERADAS 275
Proposição 9.1.
1. Linearidade da integral dupla. Se f e g são funções integraveis sobreR então para todo α, β ∈ R, α f + β g é integrável sobre R, e:
R
α f (x, y)+β g(x, y)
dxdy = α
Rf (x, y) dxdy+β
Rg(x, y) dxdy.
2. Se f e g são integráveis sobre R e g(x, y) ≤ f (x, y), para todo (x, y) ∈ R,então:
R
g(x, y) dxdy ≤
R
f (x, y) dxdy.
3. Se R é subdividido em k retângulos e f é integrável sobre cada Ri, i =1,...,k então f é integrável sobre R e,
R
f (x, y) dxdy =k
i=1
Ri
f (x, y) dxdy.
9.3 Integrais Iteradas
Uma integral iterada de f sobre R é uma integral do tipo:
d
c b
a
f (x, y) dxdy.
Para calculá-la fixamos y e calculamos a integral b
a
f (x, y) dx como integral
de uma veriável em x; o resultado é uma função de y que é novamenteintegrada em y, com limites de integração c e d.
A integral b
a
d
c
f (x, y) dy
dx é calculada de forma análoga.
Exemplos 9.1.
[1] Calcule 20
31
x2y dy
dx.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 276/407
276 CAPÍTULO 9. INTEGRAÇÃO DUPLA
31
x2y dy = x2
31
y dy = 4x2 e 20
31
x2y dy
dx =
20
4x2 dx = 32
3 .
[2] Calcule π
0 π
0 cos(x + y) dx
dy. π
0
cos(x + y) dx = sen(x + y)x=π
x=0 = sen(y + π) − sen(y),
e π
0
π
0
cos(x + y) dx
dy =
π
0
(sen(y + π) − sen(y)) dy = −4.
[3] Calcule 1
−1 1
−2(x2 + y2) dxdy.
1−2
(x2 + y2) dx =x3
3 + x y2
x=1
x=−2= 3 + 3 y2
e 1−1
1−2
(x2 + y2) dx
dy =
1−1
(3 + 3 y2) dy = 8.
[4] Calcule π3
π
6
4
0
ρ2 eρ3 sen(φ) dρdφ.
40
ρ2 eρ3 sen(φ) dρ = sen(φ)
40
ρ2 eρ3 dρ = sen(φ) eρ3
3
4
0
;
logo: 40
ρ2 eρ3 sen(φ) dρ == sen(φ) e64 − 1
3
e
π3π6
40 ρ
2
eρ3
sen(φ) dρ
dφ =
e64
−1
3 π3
π6
sen(φ) dφ
logo:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 277/407
9.4. TEOREMA DE FUBINI 277
π3
π6
40
ρ2 eρ3 sen(φ) dρ
dφ =
(e64 − 1) (√
3 − 1)
6 .
[5] Calcule 10
√
1−y2
0
1 − y
2
dx
dy. √ 1−y2
0
1 − y2 dx = 1 − y2
e:
e
10
√ 1−y2
0
1 − y2 dx
dy =
10
(1 − y2) dy = 2
3.
[6] Seja a função f : [0, 1] × [0, 1] −→ R definida por:
f (x, y) =
1 se x ∈ Q
2 y se x /∈ Q.
Então:
10
dy =
10
dy = 1 se x ∈ Q 10
2 y dy = 1 se x /∈ Q.
Logo, 1
0
1
0
dydx = 1.
Por outro lado 10
f (x, y) dx não existe, exceto quando y = 1
2; logo, 1
0
10
dx
dy
não existe. Em geral, nada garante a existência das integrais iteradas.
9.4 Teorema de Fubini
O seguinte teorema fundamental relaciona a integral dupla com as integraisiteradas, o que facilitará seu cálculo.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 278/407
278 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Teorema 9.2. (Fubini): Seja f : R −→ R contínua sobre R. Então:
R
f (x, y) dxdy =
d
c
b
a
f (x, y) dx
dy =
b
a
d
c
f (x, y) dy
dx
Prova: Veja o apêndice.
Observações 9.1.
1. Uma visualização geométrica do teorema de Fubini pode ser feita u-sando o princípio de Cavalieri: “ Dado um sólido, se denotamos porA(y) a área da seção transversal ao sólido, medida a uma distância y deum plano de referência, o volume do sólido é dado por: V =
dc A(y) dy,
onde c e d são as distâncias mínima e máxima ao plano de referência”.
2. Se f é uma função contínua e f (x, y) ≥ 0 em todo R, então:
R
f (x, y) dxdy
representa o volume do sólido W :
W = {(x,y,z ) ∈ R3 /a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f (x, y)}.
c
Rb
d
a
Figura 9.7:
3. Se intersectamos o sólido por um plano paralelo ao plano yz a umadistância x da origem, obtemos uma seção plana que tem como área

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 279/407
9.4. TEOREMA DE FUBINI 279
A(x) = d
c f (x, y) dy. Pelo princípio de Cavalieri, o volume total dosólido é:
R
f (x, y) dxdy =
b
a
A(x) dx =
b
a
d
c
f (x, y) dy
dx.
4. Analogamente, se intersectamos o sólido por um plano paralelo aoplano xz a uma distância y da origem obtemos uma seção plana deárea A(y) = b
a f (x, y) dx e pelo princípio de Cavalieri:
R
f (x, y) dxdy =
d
c
A(y) dy =
d
c
b
a
f (x, y) dx
dy.
Exemplos 9.2.
[1] Calcule
R
dxdy, onde R = [a, b] × [c, d]. R
dxdy =
b
a
d
c
dy
dx =
b
a
(d − c) dx = (b − a) (d − c);
numericamente a integral dupla
R
dxdy, corresponde a área de R ou ao
volume do paralelepípedo de base R e altura 1.
[2] Calcule
R
f (x, y) dxdy, onde R = [a, b] × [c, d] e f (x, y) = h, h constante
positiva. R
f (x, y) dxdy = h
R
dxdy = h × A(R) = h (b − a) (d − c),
onde a última igualdade expressa o volume do paralelepípedo de base R ealtura h.
[3] Calcule
R
(x y + x2) dxdy, onde R = [0, 1] × [0, 1].
R(x y + x2) dxdy = 1
0 1
0
(x y + x2) dx dy = 1
0 x2 y
2 +
x3
3 x=1
x=0
dy
=
10
y
2 +
1
3
dy =
7
12.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 280/407
280 CAPÍTULO 9. INTEGRAÇÃO DUPLA
O número 7
12 representa o volume do sólido limitado superiormente pelo
gráfico da função f (x, y) = x y + x2 e pelos planos coordenados. ((x, y) ∈[0, 1] × [0, 1]).
0
1
0
1
Figura 9.8: Exemplo [4].
[4] Calcule
R
x y2 dxdy, onde R = [−1, 0] × [0, 1].
R
x y2 dxdy =
10
0−1
x y2 dx
dy = −1
2
10
y2dy = −1
6.
[5] Calcule
R
sen(x + y) dxdy, onde R = [0, π] × [0, 2π].
R
sen(x + y) dxdy =
2π
0
π
0
sen(x + y) dx
dy
=
2π
0
(cos(y) − cos(y + π)) dy = 0.
[6] Calcule o volume do sólido limitado superiormente por z = 1 − y einferiormente pelo retângulo definido por 0 ≤ x ≤ 1 e 0 ≤ y ≤ 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 281/407
9.4. TEOREMA DE FUBINI 281
0.00.5
1.0
0.0
0.5
1.0
0.0
0.5
1.0
Figura 9.9: Sólido do exemplo [6].
O sólido está limitado superiormente pelo plano z = 1 − y e inferiormentepelo retângulo R = [0, 1] × [0, 1]; então, o volume V é:
V =
R(1 − y) dxdy = 10
10
(1 − y) dx
dy = 10
(1 − y) dy = 12 u.v.
[7] Calcule o volume do sólido limitado por z = x2 + y2 e pelos planos x = 0,x = 3, y = 0 e y = 1.
Figura 9.10: Sólido do exemplo [7].
R = [0, 3] × [0, 1]. O volume é:
V =
R(x2
+ y2
) dxdy = 10 3
0 (x2
+ y2
) dx
dy = 10 ( 9 + 3y
2
) dy = 10 u.v.
u.v. =unidades de volume.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 282/407
282 CAPÍTULO 9. INTEGRAÇÃO DUPLA
[8] Calcule o volume do sólido limitado por z = 1−y2 e pelos planos x = −1,x = 1, y = −1 e y = 1.
Figura 9.11: Sólido do exemplo [8].
R = [−1, 1] × [−1, 1]. O volume é:
V =
R
(1 − y2) dxdy =
1
−1
1
−1(1 − y2) dx
dy = 2
1
−1(1 − y2) dy =
8
3 u.v.
9.5 Extensão do Teorema de Fubini
Antes de estudar a integral dupla em regiões mais gerais enunciaremos umagenereralização do teorema 9.1.
Definição 9.2. Seja A ⊂ R, R = [a, b]×[c, d]. O conjunto A ⊂ R tem conteúdonulo se existe um número finito de sub-retângulos Ri
⊂ R, (1
≤ i
≤ n) tais
que A ⊂ R1 ∪ R2 ∪ . . . ∪ Rn−1 ∪ Rn e:
limn→+∞
ni=1
|Ri| = 0;
onde |Ri| é a área de Ri.
Exemplos 9.3.
[1] Se A = { p1, p2, ......., pm}, pi ∈ R, (1 ≤ i ≤ m). O conjunto A tem conteúdo
nulo. Utilizando uma partição de ordem n de R como antes, temos:
|Ri| = (b − a) (d − c)
n2 ,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 283/407
9.5. EXTENSÃO DO TEOREMA DE FUBINI 283
1 ≤ i ≤ n. Como cada ponto pode estar no máximo em quatro sub-retângulos, então:
0 <
ni=1
|Ri| ≤ 4 m (b − a) (d − c)
n2 .
Logo limn→+∞
ni=1
|Ri| = 0.
[2] ∂R tem conteúdo nulo.
b
c
d
x xai i+1
y j+1
yRRij
j
Figura 9.12: ∂R.
Os pontos de ∂R estão distribuido em 4 n − 4 sub-retângulos Rij :
0 <n
i=1
|Ri| ≤ (4 n − 4) (b − a) (d − c)
n2 ≤ 4 (b − a) (d − c)
n ,
pois n−1n < 1. Logo:
limn→+∞
ni=1
|Ri| = 0.
É possível provar que o gráfico de uma função contínua f : [a, b] −→ R temconteúdo nulo.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 284/407
284 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Figura 9.13: G(f ).
Teorema 9.3. Se f : R −→ R é uma função limitada e o conjunto onde f é descontínua tem conteúdo nulo, então f é integra´ vel sobre R.
Prova: Veja [EL] na bibliografia.
9.6 Integração Dupla sobre Regiões mais Gerais
Definiremos três tipos especiais de subconjuntos do plano, que serão utili-zados para estender o conceito de integral dupla sobre retângulos a regiõesmais gerais
9.7 Regiões ElementaresSeja D ⊂ R2.
9.7.1 Regiões de tipo I
D é uma região de tipo I se pode ser descrita por:
D = {(x, y) ∈ R2/a ≤ x ≤ b, φ1(x) ≤ y ≤ φ2(x)}
sendo φi : [a, b] −→ R (i = 1, 2) funções contínuas tais que φ1(x) ≤ φ2(x)para todo x ∈ [a, b].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 285/407
9.7. REGIÕES ELEMENTARES 285
a b
D
D
ba
φ
φ
φ
φ
1
2
2
1
Figura 9.14: Regiões de tipo I.
9.7.2 Regiões de tipo II
D é uma região de tipo II se pode ser descrita por:
D = {(x, y) ∈ R2/c ≤ y ≤ d, ψ1(y) ≤ x ≤ ψ2(y)}
sendo ψi : [c, d] −→ R (i = 1, 2) funções contínuas tais que ψ1(y) ≤ ψ2(y)para todo y ∈ [c, d].
D
d
c
ψ Dψ
ψ 1 2
ψ
1 2
Figura 9.15: Regiões de tipo II.
9.7.3 Regiões de tipo III
D é uma região de tipo III se pode ser descrita como região de tipo I ou detipo II.
Observações 9.2.
1. As regiões de tipos I, II ou III são chamadas elementares.
2. As regiões elementares são fechadas e limitadas.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 286/407
286 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Exemplos 9.4.
[1] A região limitada pelas curvas y = x2 e y = 4 x − x2 pode ser descritacomo de tipo I:
A interseção das curvas é dada pela solução do sistema:
y = x2
y = 4 x − x2,
do qual obtemos: x = 0 e x = 2; logo, D = {(x, y) ∈ R2 / 0 ≤ x ≤ 2, x2 ≤y ≤ 4x − x2}.
0.5 1.0 1.5 2.0
1
2
3
4
5
Figura 9.16: Região de tipo I.
[2] Seja a região D limitada pelas seguintes curvas: y2 − x = 1 e y2 + x = 1.
A região pode ser descrita por:
D =
{(x, y)
∈R2 /
−1
≤y
≤1, y2
−1
≤x
≤1
−y2
};
D é uma região de tipo II.
1.0 0.5 0.5 1 .0
1.0
0.5
0.5
1.0
Figura 9.17: Região de tipo II.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 287/407
9.7. REGIÕES ELEMENTARES 287
[3] A região D limitada pela reta x + y = 2 e pelos eixos coordenados, noprimeiro quadrante, pode ser descrita como de tipo II:
D = {(x, y) ∈ R2/0 ≤ y ≤ 2, 0 ≤ x ≤ 2 − y}.
0.5 1.0 1.5 2.0
0.5
1.0
1.5
2.0
Figura 9.18: Região de tipo III.
[4] A região D limitada pelas curvas y = x−1 e y2 = 2 x+6, pode ser descritacomo de tipo II.
A interseção das curvas é dada pela solução do sistema:y = x − 1
y2 = 2 x + 6,
do qual obtemos: x = −1 e x = 5; logo:
D = {(x, y) ∈ R2/ − 2 ≤ y ≤ 4, y2
2 − 3 ≤ x ≤ y + 1}.
1 2 3
1
2
3
1 2 3
1
2
3
Figura 9.19: Região de tipo II.
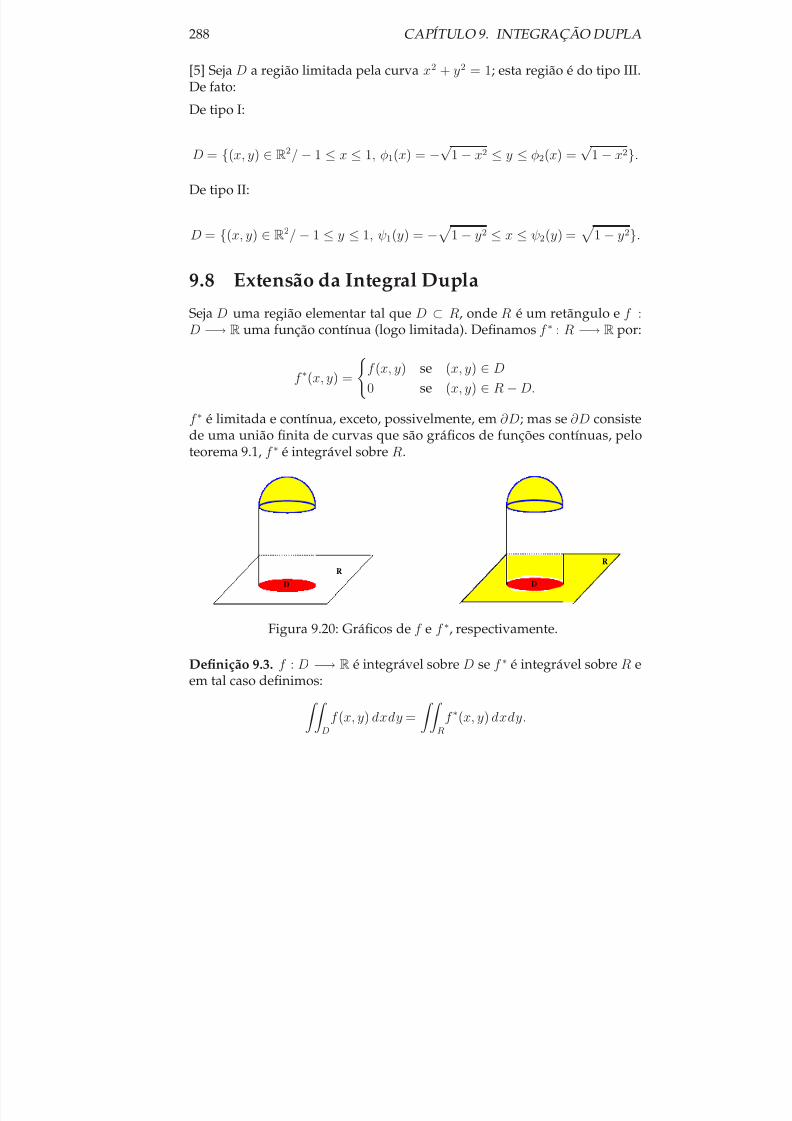
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 288/407
288 CAPÍTULO 9. INTEGRAÇÃO DUPLA
[5] Seja D a região limitada pela curva x2 + y2 = 1; esta região é do tipo III.De fato:
De tipo I:
D = {(x, y) ∈ R2/ − 1 ≤ x ≤ 1, φ1(x) = −√
1 − x2 ≤ y ≤ φ2(x) =√
1 − x2}.
De tipo II:
D = {(x, y) ∈ R2/ − 1 ≤ y ≤ 1, ψ1(y) = −
1 − y2 ≤ x ≤ ψ2(y) =
1 − y2}.
9.8 Extensão da Integral Dupla
Seja D uma região elementar tal que D ⊂ R, onde R é um retãngulo e f :D −→ R uma função contínua (logo limitada). Definamos f ∗ : R −→ R por:
f ∗(x, y) =
f (x, y) se (x, y) ∈ D
0 se (x, y) ∈ R − D.
f ∗ é limitada e contínua, exceto, possivelmente, em ∂D; mas se ∂D consistede uma união finita de curvas que são gráficos de funções contínuas, peloteorema 9.1, f ∗ é integrável sobre R.
D
R
R
D
Figura 9.20: Gráficos de f e f ∗, respectivamente.
Definição 9.3. f : D −→ R é integrável sobre D se f ∗ é integrável sobre R eem tal caso definimos:
D
f (x, y) dxdy =
R
f ∗(x, y) dxdy.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 289/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 289
Se R1 é outro retângulo tal que D ⊂ R1 e f ∗1 : R1 −→ R é definida comoantes, então:
R
f ∗(x, y) dxdy =
R1
f ∗1 (x, y) dxdy,
pois f ∗ = f ∗1 = 0 onde R e R1 diferem.
R
D
R
f* =f* =0
1
1
Figura 9.21:
Logo,
Df (x, y) dxdy não depende da escolha do retângulo.
9.9 Integral Dupla e Volume de Sólidos
Proposição 9.2. Se f : D −→ R é uma função contínua e limitada sobre D,então:
1. Se D é uma região de tipo I: D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)
f (x, y) dy
dx
2. Se D é uma região de tipo II:
D
f (x, y) dxdy =
d
c
ψ2(y)
ψ1(y)
f (x, y) dx
dy
Para a prova, veja o apêndice.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 290/407
290 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Corolário 9.4. Se f (x, y) = 1 em todo D, então:
D
dxdy = Área(D)
De fato, se D é de tipo I, temos
Ddxdy = b
a
φ2(x) − φ1(x)
dx = A(D).
Se f (x, y) ≥ 0 e é contínua em D, podemos novamente interpretar a integraldupla de f sobre D como o volume do sólido W limitado superiormentepelo gráfico de f e inferiormente por D.
W = {(x,y,z ) ∈ R3/(x, y) ∈ D, 0 ≤ z ≤ f (x, y)}
D é a projeção de W sobre o plano xy e:
V (W ) =
Df (x, y) dxdy
9.9.1 Exemplos
[1] Calcule 10
1y
ex2dx
dy. A integral não pode ser calculada na ordem
dada. Observe que:
Dex2dxdy =
1
0 1
y
ex2 dxdy.
A região D, onde está definida a integral, é de tipo II: 0 ≤ y ≤ 1 e y ≤ x ≤ 1.
1
1
1
1
Figura 9.22: A região D.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 291/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 291
A região D é de tipo III; logo, D também é de tipo I. De fato: 0 ≤ x ≤ 1 e0 ≤ y ≤ x e:
D
ex2 dxdy =
10
x
0
ex2
dy
dx =
10
x ex2
dx = 1
2(e − 1).
[2] Calcule 10
1x
sen(y)
y dy
dx.A região D, onde está definida a integral é de tipo I: 0 ≤ x ≤ 1 e x ≤ y ≤ 1.Por outro lado, D é de tipo III, logo D também é de tipo II: 0 ≤ y ≤ 1 e0 ≤ x ≤ y:
1
1
1
1
Figura 9.23: A região D.
10
1x
sen(y)
y dy
dx =
10
y
0
sen(y)
y dx
dy =
10
sen(y) dy = 1 − cos(1).
[3] Calcule
D
1 − y2 dxdy, onde D é a região limitada por x2 + y2 = 1 no
primeiro quadrante.
1
1
1
1
Figura 9.24: A região D.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 292/407
292 CAPÍTULO 9. INTEGRAÇÃO DUPLA
Consideramos D como região de tipo II:
D = {(x, y) ∈ R/0 ≤ y ≤ 1, 0 ≤ x ≤
1 − y2}.
Pela proposicão:
D
1 − y2 dxdy = 1
0
√ 1−y2
0
1 − y2 dx
dy = 1
0
(1 − y2) dy = 23
.
Note que se escrevemos D como região de tipo I, a integração é muito maiscomplicada.
[4] Calcule
D
(x + y)2 dxdy, se D é a região limitada por y = x, 2 y = x + 2
e o eixo dos y.
1 2
1
1 2
1
Figura 9.25: A região D.
As retas se intersectam no ponto (2, 2). Escrevendo D como região de tipo I:
0 ≤ x ≤ 2, x ≤ y ≤ x2 + 1.
D
(x + y)2 dxdy =
20
x2+1
x
(x + y)2 dy
dx
= 1
3
20
3x
2 + 13 − 8x3
dx = 21
6 .
[5] Determine o volume do sólido limitado por y − x + z = 1 e pelos planoscoordenados.
Para ter uma visão geométrica do problema, fazemos o desenho do sólido,que é limitado superiormente pelo plano que passa pelos pontos (0, 0, 1),(0, 1, 0), (−1, 0, 0) e inferiormente pelo plano z = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 293/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 293
-1
1
-1
1
Figura 9.26: O sólido e a região, respectivamente.
A integral dupla representa o volume do sólido limitado superiormente
pelo gráfico da função z = f (x, y) = 1 + x − y e, inferiormente pela região Dprojeção de W no plano xy.
W = {(x,y,z ) ∈ R3 / (x, y) ∈ D, 0 ≤ z ≤ 1 + x − y},
onde D ={
(x, y)∈R2/
−1
≤x
≤0, 0
≤y ≤
x + 1}
é região do tipo I. Seuvolume é:
V (W ) =
D
(1 + x − y) dxdy =
0−1
x+1
0
(1 + x − y) dy
dx
= 1
2
0−1
(x + 1)2dx = 1
6 u.v.
[6] Determine o volume do sólido limitado por z = 2 x+1, x = y2 e x−y = 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 294/407
294 CAPÍTULO 9. INTEGRAÇÃO DUPLA
-2
0
2
4-2
0
2
4
0
1
2
3
4
5
-2
0
2
4
0
1
2
3
-2
0
2
4
-2
0
2
4
0
1
2
3
4
5
-2
0
2
4
Figura 9.27: O sólido do exemplo [6].
1 2
-1
1
1 2
-1
1
Figura 9.28: A região D.
Observe que z = f (x, y) = 2 x + 1 e
V (W ) =
D
(2 x + 1) dxdy,
onde D é a projeção do sólido no plano xy . Considerando D como regiãodo tipo II, ela é definida por:
D ={
(x, y)∈R2 /
−1
≤y ≤
2, y2
≤x
≤y + 2
}.
O volume é:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 295/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 295
V (W ) =
D
(2x + 1) dxdy =
2−1
y+2
y2(2 x + 1) dx
dy
=
2−1
(5 y + 6 − y4) dy = 189
10 u.v.
[7] Calcule o volume do sólido que está acima do plano xy e é limitado porz = x2 + 4 y2 e x2 + 4 y2 = 4.
O gráfico de z = x2 + 4 y2 é um parabolóide elítico e o de x2 + 4 y2 = 4 é umcilindro elítico.
-2
-1
0
1
2
x
-0.50
0.51
y
0
1
2
3
z
-2
-1
0
1x
.50
.
-2
-1
0
1
2
x
-1-0.5
0 0.5
1
y
0
1
2
3
z
-2
-1
0
1x
1-0.5
0 .
Figura 9.29: O sólido do exemplo [7].
1-1 2
-1
1
1-1 2
-1
1
Figura 9.30: A região do exemplo [7].
Pela simetria do sólido, calculamos o volume no primeiro octante e multi-plicamos o resultado por 4.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 296/407
296 CAPÍTULO 9. INTEGRAÇÃO DUPLA
1 2
1
1 2
1
Figura 9.31: A região D.
D é a projeção do cilindro no plano xy . D é do tipo I: 0 ≤ x ≤ 2 e 0 ≤ y ≤√ 4 − x2
2 e,
V = 4
D
(x2 + 4y2) dxdy = 4
20
√ 4−x2
2
0
(x2 + 4 y2) dy
dx
= 2 20
x2
√ 4 − x2
+
(4
−x2)
32
3
dx = 4 π u.v.
[8] Calcule a área da região plana limitada pelas curvas y = x2 e y = 4 x−x2.
Os pontos de interseção das curvas são: (0, 0) e (2, 4).
0.5 1.0 1.5 2.0
1
2
3
4
5
Figura 9.32: A região D.
D é do tipo I: 0 ≤ x ≤ 2 e x2 ≤ y ≤ 4x − x2.
A =
D
dxdy =
20
4x−x2
x2
dy
dx = 2
20
(2x − x2) dx = 8
3 u.a.
[9] Calcule o volume do sólido obtido pela interseção dos cilindros: x2+y2 =a2 e x2 + z 2 = a2, a = 0.O sólido é simétrico em relação à origem.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 297/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 297
Figura 9.33: Interseção dos cilindros.
Calculamos o volume da porção do sólido no primeiro octante e multiplica-mos o resultado por 8.
Figura 9.34: O sólido no primeiro octante.
Claramente D é região do tipo I: 0 ≤ x ≤ a e 0 ≤ y ≤ √ a2 − x2. A altura do
sólido W é dada por z = f (x, y) =√
a2 − x2 e:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 298/407
298 CAPÍTULO 9. INTEGRAÇÃO DUPLA
V = 8
D
√ a2 − x2 dxdy
= 8 a
0 √
a2−x2
0
√ a2 − x2dydx
= 8
a
0
(a2 − x2) dx = 16 a3
3 .
[10] Calcule o volume do sólido limitado por 3 x + 4 y = 10, z = x2 + y2 esituado acima do plano xy, no primeiro octante.
01
23
0
1
2
3
0
2
4
6
8
0
2
1 2 3
1
2
1 2 3
1
2
Figura 9.35: Sólido e região do exemplo [10], respectivamente.
D é uma região do tipo II: 0 ≤ y ≤ 5
2 e 0 ≤ x ≤ 10
−4y
3 ; logo:
V =
D
(x2 + y2) dxdy =
52
0
10−4 y3
0
(x2 + y2) dx
dy
= − 2
81
52
0
[2 y − 5][43 y2 − 80 y + 100] dy
= − 2
81
52
0
[86 y3 − 375 y2 + 600 y − 500] dy = 15625
1296 u.v.
[11] Calcule o volume do sólido limitado por z − x y = 0, z = 0, y = x2 ey2 − x = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 299/407
9.9. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 299
Figura 9.36: Sólido do exemplo [11].
D é uma região do tipo I: 0 ≤ x ≤ 1 e x2 ≤ y ≤ √ x,
1
1
1
1
Figura 9.37: Região D.
Logo:
V =
D
x y d x d y =
10
√ xx2
x y d y
dx =
1
2
10
[x2 − x5] dx = 1
12 u.v.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 300/407
300 CAPÍTULO 9. INTEGRAÇÃO DUPLA
9.10 Exercícios
1. Calcule
R
f (x, y) dxdy, se:
(a) f (x, y) = x2 y3 e R = [0, 1] × [0, 1]
(b) f (x, y) = (x + y)2 (x2 − y2) e R = [0, 1] × [0, 1](c) f (x, y) = x2 + 4 y e R = [0, 2] × [0, 3]
(d) f (x, y) = x2
y2 + 1 e R = [−1, 1] × [−1, 1]
(e) f (x, y) = ex y (x2 + y2) e R = [−1, 3] × [−2, 1]
(f) f (x, y) = x y − y2 e R = [0, 5] × [0, 4]
(g) f (x, y) = 5 x y2 e R = [1, 3] × [1, 4]
(h) f (x, y) = 2 x + c2 y e R = [−2, 2] × [−1, 1]
(i) f (x, y) = x2
− y2
e R = [1, 2] × [−1, 1].
2. Calcule o volume do sólido limitado superiormente pelo gráfico dafunção e inferiormente pelo retângulo dado:
(a) z =
9 − y2 e R = [0, 4] × [0, 2]
(b) z = x2 + y2 e R = [−2, 2] × [−3, 3]
(c) z = y2 − x2 e R = [−1, 1] × [1, 3]
(d) z = 2 x + 3 y + 6 e R = [
−1, 2]
×[2, 3]
(e) z = a cos(2 θ) + b sen(2 α) e R = [0, π2 ] × [0, π
2 ]
(f) z = x sen(y) e R = [0, π] × [0, π]
3. Calcule as seguintes integrais mudando a ordem de integração:
(a) 10
1y
tg(x2) dx
dy
(b) 2
1
x
1
x2
y2
dydx
(c) 10
√ 1−x2
0
1 − y2 dy
dx
(d) 10
1x
sen(y2) dy
dx
(e) 1
0
y
3y
ex2 dx dy
(f) 30
9y2
y cos(x2) dx
dy

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 301/407
9.10. EXERCÍCIOS 301
4. Calcule as seguintes integrais sabendo que D é limitada pelas curvasdadas:
(a)
D
ydxdy; y = 2 x2 − 2, y = x2 + x
(b)
Dx y d x d y;
x2
a2 + y2
b2 = 1, x, y ≥ 0
(c)
D
xdxdy; x − y2 = 0, x = 1
(d)
D
dxdy
x2 + 1; y − x2 = 0, y = 1
(e)
D
(x2 + y2) dxdy; y = 0, y = x − 1 e x = 1, x = 0
(f)
Dex+y dxdy; y = 0, y = x e x − 1 = 0
(g)
D
xcos(y) dxdy; y = 0, y = x2 e x = 1
(h)
D
4 y3 dxdy; y = x − 6 e y2 = x
(i)
D
(y2 − x) dxdy; y2 = x e x = 3 − 2 y2
(j)
D
(x2 + 2 y) dxdy; y = 2 x2 e y = x2 + 1
(k)
D
(1 + 2 x) dxdy; x = y2 e y + x = 2
(l)
D
dxdy; y2 = x3 e y = x

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 302/407
302 CAPÍTULO 9. INTEGRAÇÃO DUPLA

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 303/407
Capítulo 10MUDANÇA DE COORDENADAS
10.1 Introdução
Seja D∗ ⊂ R
2
uma região elementar no plano uv e:
x, y : D∗ −→ R,
onde x = x(u, v) e y = y(u, v) são funções contínuas e com derivadas parci-ais contínuas num retângulo aberto R tal que D∗ ⊂ R. Estas duas funçõesdeterminam uma transformação do plano uv no plano xy. De fato:
T : D∗ −→ R2,
onde T (u, v) = (x(u, v), y(u, v)). A transformação T é também denotada por:
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Denotemos a imagen de D∗ por T como D = T (D∗), contida no plano xy.
303

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 304/407
304 CAPÍTULO 10. MUDANÇA DE COORDENADAS
TD* D
y
x
v
u
Figura 10.1: Mudança de coordenadas.
Exemplos 10.1.
Seja D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)).
Determinemos D = T (D∗) no plano xy.
x = r cos(t)
y = r sen(t);
logo: x2 + y2 = r2 ≤ 1; então D = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
π2
L D
t
1 r
* D
x
y
1
T
Figura 10.2:
Definição 10.1. Uma transformação T é injetiva em D∗ se:
T (u1, v1) = T (u2, v2)
implica em u1 = u2 e v1 = v2, para todo (u1, v1), (u2, v2) ∈ D∗.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 305/407
10.2. JACOBIANO DA MUDANÇA DE COORDENADAS 305
No exemplo 10.1, temos que:
D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)).
A transformação T não é injetiva: De fato, T (0, t1) = T (0, t2) = (0, 0) parat1 = t2. Observe que:
T (L) = (0, 0), onde L = {(0, t)/0 ≤ t ≤ 2 π}.
Mas se D∗ = (0, 1] × (0, 2π], T é injetiva.
10.2 Jacobiano da Mudança de Coordenadas
Seja T : D∗ −→ D uma transformação definida por:
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Considere a seguinte matriz:
J =
∂x
∂u
∂x
∂v
∂y
∂u
∂y
∂v
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗. J é cha-mada matriz Jacobiana (de Jacobi) da transformação T .
Definição 10.2. O determinante da matriz J , dito jacobiano de T , é deno-tado e definido por:
∂ (x, y)
∂ (u, v) = det(J ) =
∂x
∂u
∂y
∂v − ∂x
∂v
∂y
∂u
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗.
Observação 10.1. A importância da matriz Jacobiana de uma transformaçãodeverá ser estudada com mais rigor, em disciplinas mais avançadas. Porenquanto citaremos a seguinte proposição, sem prova:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 306/407
306 CAPÍTULO 10. MUDANÇA DE COORDENADAS
Proposição 10.1. Se:
∂ (x, y)
∂ (u, v)(u0, v0) = 0, (u0, v0) ∈ D∗,
então existe uma vizinhança do ponto (u0, v0) tal que a restrição de T a estavizinhança é injetiva.
Exemplos 10.2.
[1] No exemplo 10.1, temos que:
D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)). Logo,
∂ (x, y)
∂ (r, t) = r.
Note que para todo (r, t) ∈ L temos ∂ (x, y)
∂ (r, t) = 0.
[2] Seja o quadrado D∗ = [0, 1] × [0, 1] e T (u, v) = (u + v, u − v).x = u + v
y = u − v.
Se u = 0, então y = −x; se v = 0, então y = x, se u = 1; então y = 2 − x e sev = 1, então y = x − 2.
A região D = T (D∗) é a região do plano xy limitada pelas curvas y = x,y = −x, y = x − 2 e y = 2 − x. O jacobiano:
∂ (x, y)∂ (u, v)
= −2.
1
1
1 2
1
1
Figura 10.3: Regiões D∗ e D, respectivamente.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 307/407
10.3. MUDANÇA DE COORDENADAS E INTEGRAIS DUPLAS 307
[3] Seja D∗ a região limitada pelas curvas u2 − v2 = 1, u2 − v2 = 9, u v = 1 eu v = 4 no primeiro quadrante, sendo T (u, v) = (u2 − v2, u v).
Determinemos T (D∗) = D, fazendo:x = u2 − v2
y = u v;
se u2 − v2 = 1, então x = 1; se u2 − v2 = 9, então x = 9, se u v = 1, entãoy = 1 e se u v = 4, então y = 4
1 2 3
1
2
1 2 3
1
2
1 5 9
1
4
Figura 10.4: Regiões D∗ e D, respectivamente.
∂ (x, y)
∂ (u, v) = 2(u2 + v2), que não se anula em D∗.
10.3 Mudança de Coordenadas e Integrais Duplas
O seguinte teorema nos ensina o comportamento das integrais duplas sobmudanças de coordenadas.
Teorema 10.1. Sejam D e D∗ regiões elementares no plano, T uma transfor-mação de classe C 1 e injetiva em D∗. Suponha que T (D∗) = D. Então, paratoda função integrável f sobre D temos:
D
f (x, y) dxdy =
D∗
f (u, v)
∂ (x, y)
∂ (u, v)
dudv
onde: ∂ (x, y)
∂ (u, v)
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 308/407
308 CAPÍTULO 10. MUDANÇA DE COORDENADAS
é o valor absoluto do determinante Jacobiano e a função nas novas coorde-nadas f (u, v) = f (x(u, v), y(u, v)).
Em particular a área de D é:
A(D) = D dxdy = D∗∂ (x, y)
∂ (u, v) dudv
Observações 10.1.
1. É possível mostrar que o teorema anterior é ainda válido se T não éinjetiva num subconjunto de conteúdo nulo de D∗, como no caso de L,no exemplo 1.
2. Observe que podemos ir do plano uv ao plano xy e vice-versa, pois T é bijetiva.
10.4 Mudança Linear de Coordenadas
Consideremos a seguinte transformação:
x = x(u, v) = a1 u + b1 vy = y(u, v) = a2 u + b2 v
onde a1 b2 − a2 b1 = 0. Como:
∂ (x, y)
∂ (u, v) = |a1b2 − a2b1|,
do teorema anterior, segue:
Corolário 10.2. Se f (u, v) = f (a1 u + b1 v, a2 u + b2 v), então:
D
f (x, y) dxdy = |a1b2 − a2b1|
D∗
f (u, v) dudv
Em particular, a área de D é:
A(D) = |a1b2 − a2b1| A(D∗)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 309/407
10.4. MUDANÇA LINEAR DE COORDENADAS 309
Observação 10.2. Note que as inversas são:
u = u(x, y) = b2 x − b1 y
a1b2 − a2b1
v = v(x, y) = −a2 x + a1 y
a1b2 −
a2b1
,
e que:
∂ (u, v)
∂ (x, y)
=∂ (x, y)
∂ (u, v)
−1
.
Exemplos 10.3.
[1] Seja D a região limitada pelas curvas y = 2 x, y = x, y = 2 x−2 e y = x+1,calcule:
D
xydxdy.
A presença dos termos 2 x − y e y − x sugerem a seguinte mudança:u = 2 x − y
v = y − x.
A nova região D∗ é limitada pelas seguintes curvas: u = 0, u = −2, v = 0 e
v = 1.
1 2 3
1
2
3
4
1 2 3
1
2
3
4
2 1
1
Figura 10.5: Regiões D e D∗, respectivamente.
Note que:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 310/407
310 CAPÍTULO 10. MUDANÇA DE COORDENADAS
x = u + v
y = u + 2 v,
logo, ∂ (x, y)
∂ (u, v) = 1 e f (u, v) = (u + v) (u + 2 v) = u2 + 3 u v + 2 v2. Então:
D
x y d x d y =
10
0−2
(u2 + 3 u v + 2 v2) du
dv = 1.
[2] Seja D a região limitada pela curva y + x = 2 e pelos eixos coordenados,calcule:
Dey−x
x+y dxdy.
A presença dos termos x + y e x − y sugerem a seguinte mudança:
u = x + y
v = y − x.
D é limitada pelas curvas x = 0, y = 0 e x + y = 2; então, D∗ é limitada pelascurvas u = v, u = −v e u = 2, respectivamente.
1 2
1
2
1 2
1
2
1 2
2
2
Figura 10.6: Regiões D∗ e D, respectivamente.
∂ (u, v)
∂ (x, y)
= 2 e∂ (x, y)
∂ (u, v)
= 1
2, f (u, v) = e
vu ; então:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 311/407
10.4. MUDANÇA LINEAR DE COORDENADAS 311
D
ey−x
x+y dxdy = 1
2
D∗
evu dudv =
1
2
20
u
−u
evu dv
du
= 1
2
20
u evu
v=u
v=−u
du
= e − e−12
2
0
u du
= e − e−1.
[3] Determine a área da região D limitada pela curva fechada
(2 x − 4 y + 7)2 + (x − 5 y)2 = 16.
Considere a mudança:
u = 2 x − 4 yv = x − 5 y.
D∗ é a região limitada pela curva (u+7)2+v2 = 16 que é um círculo centradoem (−7, 0) de raio 4.
-10 -5 1
-3
1
-10 -5 1
-3
1
14 12 10 8 6 4 2
6
4
2
2
4
6
Figura 10.7: Regiões D∗ e D, respectivamente.
∂ (u, v)
∂ (x, y)
= 6; então∂ (x, y)
∂ (u, v)
= 1
6 e:
A(D) = 1
6 D∗
dudv = 1
6A(D∗) =
8
3πu.a.
[4] Seja D a região limitada pela curva y + x = 1 e pelos eixos coordenados,calcule:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 312/407
312 CAPÍTULO 10. MUDANÇA DE COORDENADAS
D
cosx − y
x + y
dxdy.
A presença dos termos x + y e x − y sugerem a seguinte mudança:
u = x−
y
v = x + y.
1
1
1
1
1-1
1
1-1
1
Figura 10.8: Regiões D∗ e D, respectivamente.
D∗ é a região limitada pelas seguintes curvas: u = v, u = −v e v = 1,∂ (x, y)
∂ (u, v)
= 1
2 e
f (u, v) = cosu
v
; então:
Dcosy −
x
x + y
dxdy = 1
2
D∗cosu
v
dudv
= 1
2
10
v
−v
cosu
v
du
dv
= 1
2
10
v
sen(1) − sen(−1)
dv = sen(1)
10
v dv
= sen(1)
2 .
[5] Seja D a região limitada pelas curvas y − 2 x = 2, y + 2 x = 2, y − 2 x = 1e y + 2 x = 1, calcule:
D
y + 2 x
(y − 2 x)2 dx dy.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 313/407
10.4. MUDANÇA LINEAR DE COORDENADAS 313
A presença dos termos y + 2 x e y − 2 x sugerem a seguinte mudança:u = y + 2 x
v = y − 2 x.
D∗ é a região limitada pelas seguintes curvas: u = 1, u = 2, v = 1 e v = 2.
-0.5-1 10.5
1
2
-0.5-1 10.5
1
2
1 2
1
2
1 2
1
2
Figura 10.9: Regiões D∗ e D, respectivamente.∂ (x, y)
∂ (u, v)
= 1
4 e f (u, v) =
u
v2; então:
D
y + 2 x
(y − 2 x)2 dxdy =
1
4
D∗
u
v2 dudv
= 1
4
21
21
u
v2 du
dv
= 3
16.
[5] Seja D a região limitada pelas curvas y + x = 1, y + x = 4, x − y = −1 ex − y = 1, calcule:
D
(x + y)2 ex−y dxdy.
A presença dos termos y + x e y − x sugerem a seguinte mudança:
u = x + y
v = x − y.
D∗ é a região limitada pelas seguintes curvas: u = 1, u = 4, v = −1 e v = 1.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 314/407
314 CAPÍTULO 10. MUDANÇA DE COORDENADAS
0.5 1.0 1.5 2.0 2.5 3.0
0.5
1.0
1.5
2.0
2.5
3.0
1 2 3 4
1.0
0.5
0.5
1.0
Figura 10.10: Regiões D∗ e D, respectivamente.
∂ (x, y)
∂ (u, v)
= 1
2 e f (u, v) = u2 ev; então:
D(x + y)2 ex−y dxdy = 1
2 D∗
u2 ev dudv
= 1
1
1
−1
4
1
u2 ev du
dv
= 21
2 (e − e−1).
10.5 Mudança Polar de Coordenadas
Um ponto P = (x, y) em coordenadas retangulares tem coordenadas polares(r, θ) onde r é a distância da origem a P e θ é o ângulo formado pelo eixodos x e o segmento de reta que liga a origem a P .
r
x
y
θ
P’
r
P
Figura 10.11: Mudança polar de coordenadas.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 315/407
10.5. MUDANÇA POLAR DE COORDENADAS 315
A relação entre as coordenadas (x, y) e (r, θ) é dada por:
r =
x2 + y2
θ = arctgy
x
x = 0.
Ou, equivalentemente:
x = rcos(θ)
y = r sen(θ).
Esta mudança é injetiva em:
D∗ = {(r, θ)/r > 0, θ0 < θ < θ0 + 2π},
com θ0 =constante.
Note que a região circular D = {(x, y) /x2
+ y2
≤ a2
} corresponde, em coor-denadas polares, à região retangular:
D∗ = {(r, θ) /0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π} = [0, a] × [0, 2 π].
Exemplos 10.4.
[1] A cardióide é uma curva de equação cartesiana x2 + y2 =
x2 + y2 − y;em coordenadas polares fica r = 1 − sen(θ), r ≥ 0.
-1 1
-1
-2
Figura 10.12: Cardióide.
[2] A lemniscata de Bernoulli é uma curva de equação cartesiana:
(x2 + y2)2 = a2 (x2 − y2);
em coordenadas polares fica r2 = a2 cos(2θ).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 316/407
316 CAPÍTULO 10. MUDANÇA DE COORDENADAS
Figura 10.13: Lemniscata.
[3] O cilindro circular reto de raio a, em coordenadas cartesianas é definidocomo o seguinte conjunto:
C = {(x,y,z ) ∈ R3/ x2 + y2 = a2, a ≥ 0};
em coordenadas polares:
C ∗ = {(r,θ,z ) ∈ R3/r = a, 0 ≤ θ ≤ 2 π}.
Calculemos o jacobiano da mudança de coordenadas polares:∂ (x, y)
∂ (u, v)
= r > 0.
Do teorema anterior, segue:
Corolário 10.3. Se f (r, θ) = f (rcos(θ),rsen(θ)), então:
Df (x, y) dxdy =
D∗
r f (r, θ) drdθ
Esta igualdade ainda é válida se D∗ = {(r, θ)/r ≥ 0, θ0 ≤ θ ≤ θ0 + 2π}.
Em particular a área de D é:
A(D) =
D
dxdy =
D∗
r dr dθ
10.6 Regiões Limitadas por Círculos
Seja a > 0. A região D, limitada pelo círculo x2 + y2 = a2, em coordenadas
polares é dada por:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π}.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 317/407
10.6. REGIÕES LIMITADAS POR CÍRCULOS 317
Figura 10.14: A região D.
Neste caso:
D
f (x, y) dxdy =
2π
0
a
0
r f (r, θ) dr
dθ
A região D, limitada pelo círculo (x−
a)2 + y2
≤a2, em coordenadas polares
é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 acos(θ), −π
2 ≤ θ ≤ π
2}.
Figura 10.15: A região D.
Neste caso:
D
f (x, y) dxdy =
π2
−π2
2 acos(θ)
0
r f (r, θ) dr
dθ
A região D, limitada pelo círculo x2 + (y −a)2 ≤ a2, em coordenadas polaresé:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 318/407
318 CAPÍTULO 10. MUDANÇA DE COORDENADAS
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 asen(θ), 0 ≤ θ ≤ π}.
Figura 10.16: A região D.
Neste caso:
D
f (x, y) dxdy = π
0
2asen(θ)
0r f (r, θ) dr
dθ
Exemplos 10.5.
[1] Calcule
D
(x2 + y2) dxdy, onde D é a região limitada pelas curvas:
x2 + y2 = 1, x2 + y2 = 4, y = x e y =
√ 3 x
3 ,
no primeiro quadrante.
1 2
1
1 2
1
Figura 10.17: A região D.
Usando coordenadas polares, a nova região D∗ no plano rθ é determinadapor:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 319/407
10.6. REGIÕES LIMITADAS POR CÍRCULOS 319
D∗ = {(r, θ) /1 ≤ r ≤ 2, π
6 ≤ θ ≤ π
4}.
Como x2 + y2 = r2, temos:
D
(x2 + y2) dxdy =
D∗
r3 drdθ =
π4
π6
2
1
r3 dr
dθ =
5 π
16 .
[2] Calcule
D
ln(x2 + y2) dxdy, onde D é a região limitada pelas curvas:
x2 + y2 = a2 e x2 + y2 = b2, (0 < a < b).
Usando coordenadas polares temos que D∗ está determinada por:
a ≤ r ≤ b e 0 ≤ θ ≤ 2π.
Por outro lado, ln(x2 + y2) = 2 ln(r),
D
ln(x2 + y2) dxdy =
D∗
2 r ln(r) drdθ
= 4 π b
ar ln(r) dr
= π (r2(2 ln(r) − 1))
b
a
= π (2 b2 ln(b) − 2 a2 ln(a) + a2 − b2).
[3] Determine o volume do sólido situado acima do plano xy e limitadopelos gráficos de z = x2 + y2 e x2 + y2 = 2 y.
O gráfico de z = x2 + y2 é um parabolóide centrado na origem e o do cilin-dro circular reto x2 + y2 = 2y que é centrado em (0, 1, 0) e de raio 1, pois,podemos escrever x2 + y2 − 2 y = x2 + (y − 1)2 − 1.
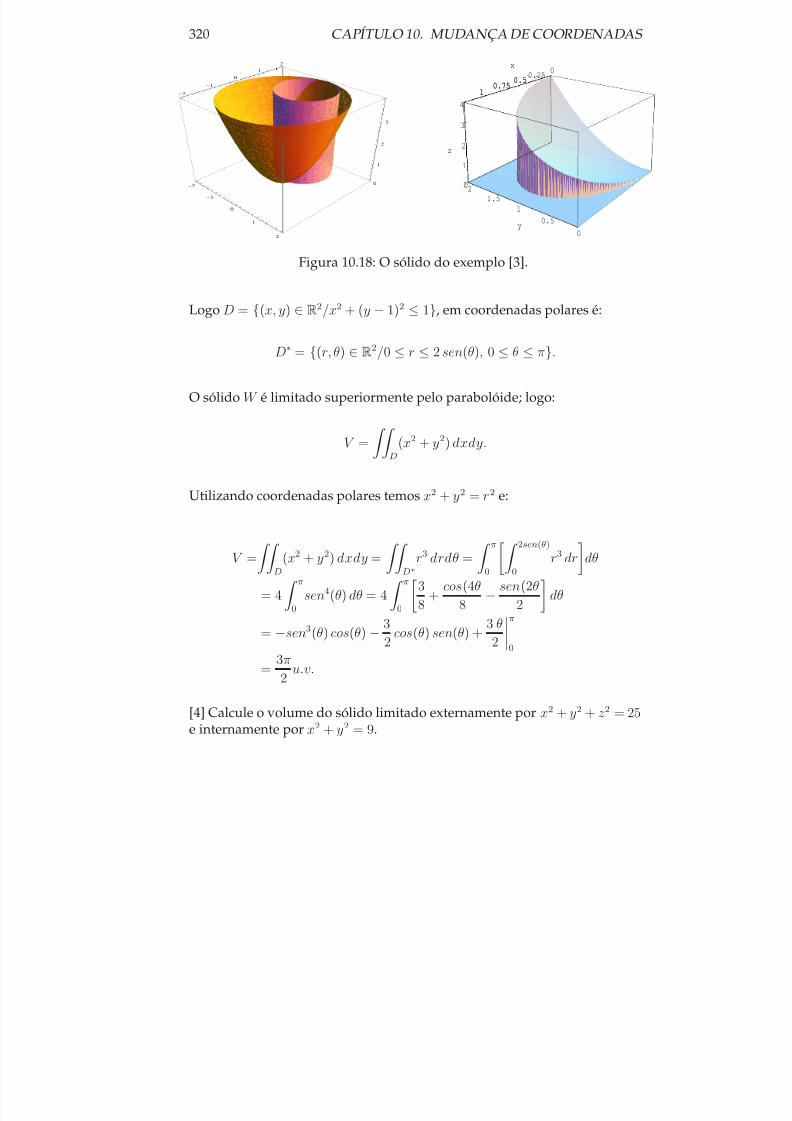
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 320/407
320 CAPÍTULO 10. MUDANÇA DE COORDENADAS
2
1
0
1
2
2
1
0
1
2
0
1
2
3
00.25
0.50.75
1
x
0
0.5
1
1.5
2
y
0
1
2
3
4
z
.0.5
0.751
Figura 10.18: O sólido do exemplo [3].
Logo D = {(x, y) ∈ R2/x2 + (y − 1)2 ≤ 1}, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 sen(θ), 0 ≤ θ ≤ π}.
O sólido W é limitado superiormente pelo parabolóide; logo:
V =
D
(x2 + y2) dxdy.
Utilizando coordenadas polares temos x2 + y2 = r2 e:
V =
D
(x2 + y2) dxdy =
D∗
r3 drdθ =
π
0
2sen(θ)
0
r3 dr
dθ
= 4
π
0
sen4(θ) dθ = 4
π
0
3
8 +
cos(4θ
8 − sen(2θ
2
dθ
= −sen3(θ) cos(θ) − 3
2 cos(θ) sen(θ) +
3 θ
2
π
0
= 3π
2 u.v.
[4] Calcule o volume do sólido limitado externamente por x2 + y2 + z 2 = 25e internamente por x2 + y2 = 9.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 321/407
10.6. REGIÕES LIMITADAS POR CÍRCULOS 321
01
23
45x
01
2 3
y
0
1
2
3
4
z
01
23
4
1
Figura 10.19: O sólido do exemplo [4].
3 5
3
5
3 5
3
5
Figura 10.20: A região D.
Pela simetria do sólido, calculamos o volume no primeiro octante e multi-plicamos o resultado por 8.
V = 8
D
25 − x2 − y2 dxdy,
onde D é a projeção do sólido no plano xy. Usando coordenadas polaresobtemos a nova região D∗ definida por:
D∗ = {(r, θ) / 3 ≤ r ≤ 5, 0 ≤ θ ≤ π
2}
e 25 − x2 − y2 =√
25 − r2:
V = 8
D
25 − x2 − y2 dxdy = 8
π2
0
53
r√
25 − r2 dr
dθ =
256π
3 u.v.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 322/407
322 CAPÍTULO 10. MUDANÇA DE COORDENADAS
[5] Calcule +∞0
e−x2 dx.
Esta integral é muito utilizada em Estatística. Seja R = [−a, a] × [−a, a].Então:
Re−
(x2+y2)
dxdy = a
−a a
−ae−x2
e−y2
dy
dx = a
−ae−x2
dx a
−ae−y2
dy
.
O gráfico de f (x, y) = e−(x2+y2) é:
Figura 10.21:
Se denotamos por L(a) =
a
−a
e−u2du = 2
a
0
e−u2du, temos:
L2(a) =
R
e−(x2+y2) dxdy.
Sejam D e D1 regiões elementares tais que D ⊂ R ⊂ D1 onde D é a regiãolimitada pelo círculo inscrito em R e D1 é a região limitada pelo círculocircunscrito a R:
R
D1
D
Figura 10.22:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 323/407
10.6. REGIÕES LIMITADAS POR CÍRCULOS 323
Como f (x, y) = e−(x2+y2) é contínua em D1 e e−(x2+y2) > 0, para todo x, y, D
e−(x2+y2) dxdy ≤ L2(a) ≤
D1
e−(x2+y2) dxdy.
Usando coordenadas polares, D é definida por 0 ≤ r ≤ a e 0 ≤ θ ≤ 2π, D1 édefinida por 0
≤r
≤√
2 a e 0≤
θ≤
2π:
e−(x2+y2) = e−r2
e:
2π
0
a
0
r e−r2 dr
dθ = π (1 − e−a2);
então,
π (1 − e−
a2
) ≤ L(a) ≤ π (1 − e−2a2
).
Como:
lima→+∞
a
0
e−u2du =
+∞0
e−u2du,
temos:
+∞0
e−u2du =
√ π
2 .
[6] Se D = {(x, y) ∈ R2/1 ≤ (x−y)2 + (x + y)2 ≤ 4, y ≤ 0, x + y ≥ 0}, calcule:
D
ex+y
x−y
(x − y)2dxdy.
Usamos mudança linear: u = x − y
v = x + y.
Logo, a nova região D∗ é limitada pelas curvas u2+ v2 = 1, u2 + v2 = 4, v ≤ ue 0 ≤ v:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 324/407
324 CAPÍTULO 10. MUDANÇA DE COORDENADAS
1 2
1
2
1 2
1
2
Figura 10.23: Região D.
∂ (u, v)
∂ (x, y) = 2 então
∂ (x, y)
∂ (u, v) =
1
2 e
D
ex+y
x−y
(x − y)2dxdy =
1
2
D∗
evu
u2 du dv.
Usando coordenadas polares obtemos a região D∗∗ definida por: 1
≤ r
≤ 2
e 0 ≤ θ ≤ π4
:
1
2
D∗
evu
u2 dudv =
1
2
D∗∗
r etg(θ)
r2 cos2(θ) dr dθ =
ln(2)
2 (e − 1).
10.7 Aplicação
Seja D região do tipo II, limitada por curvas de equações (em forma polar):r = g(θ) e r = h(θ) e definida por:
D = {(r, θ)/g(θ) ≤ r ≤ h(θ), θ1 ≤ θ ≤ θ2},
onde g, h : [θ1, θ2] −→ R são funções contínuas tais que 0 ≤ g(θ) ≤ h(θ).
D
h
g
y
x
θ1
θ2
r
θ
D*
θ2
θ1
Figura 10.24:
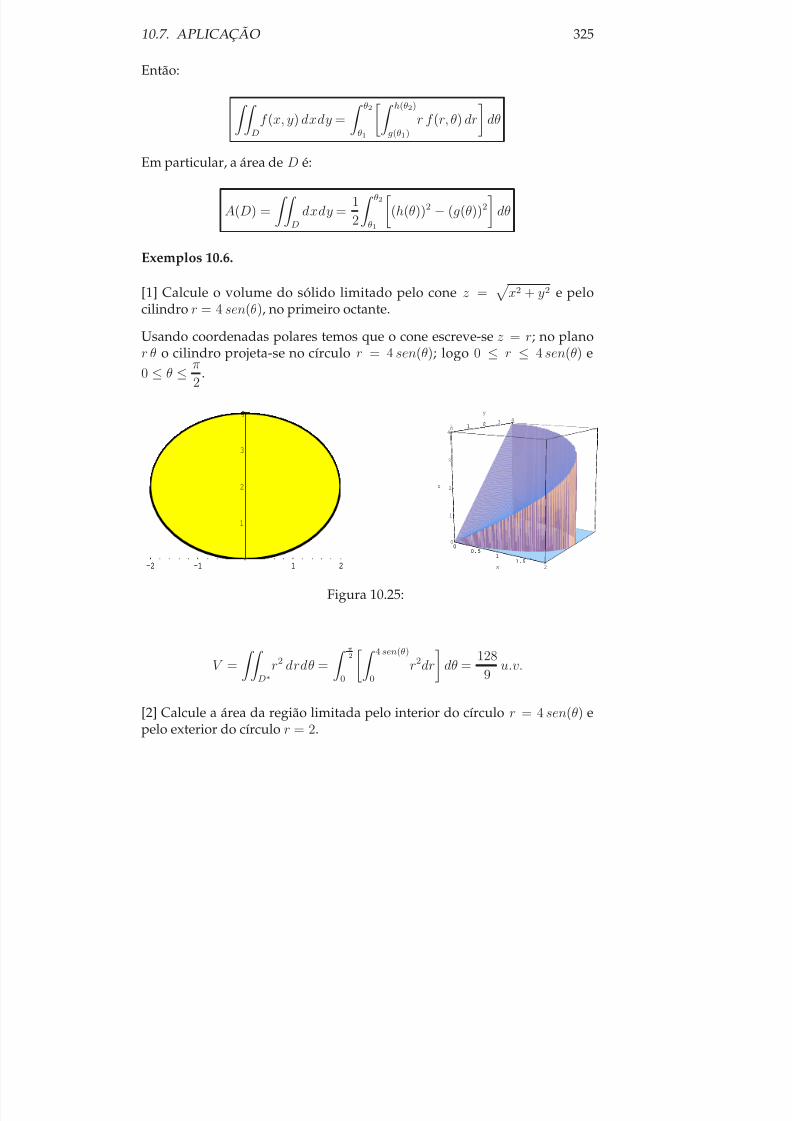
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 325/407
10.7. APLICAÇÃO 325
Então:
D
f (x, y) dxdy =
θ2
θ1
h(θ2)
g(θ1)
r f (r, θ) dr
dθ
Em particular, a área de D é:
A(D) =
D
dxdy = 1
2
θ2
θ1
(h(θ))2 − (g(θ))2
dθ
Exemplos 10.6.
[1] Calcule o volume do sólido limitado pelo cone z =
x2 + y2 e pelocilindro r = 4 sen(θ), no primeiro octante.
Usando coordenadas polares temos que o cone escreve-se z = r; no planor θ o cilindro projeta-se no círculo r = 4 sen(θ); logo 0 ≤ r ≤ 4 sen(θ) e0 ≤ θ ≤ π
2.
-2 -1 1 2
1
2
3
4
-2 -1 1 2
1
2
3
4
00.5
11.5
2x
0 1 2 3 4
y
0
1
2
3
4
z
00.5
11.5
1
Figura 10.25:
V =
D∗
r2 drdθ =
π2
0
4 sen(θ)
0
r2dr
dθ =
128
9 u.v.
[2] Calcule a área da região limitada pelo interior do círculo r = 4 sen(θ) epelo exterior do círculo r = 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 326/407
326 CAPÍTULO 10. MUDANÇA DE COORDENADAS
-2 2
-2
2
-2 2
-2
2
Figura 10.26:
Os círculos se intersectam em: θ = π6 e θ = 5π
6 e:
A(D) = 1
2
5π6
π6
(16 sen2(θ)
−4) dθ = 2π
3
+ 2√
3u.a.
[3] Calcule a área da região limitada por r = 2(1 + sen(θ)).
-2 -1 1 2
1
2
3
4
Figura 10.27:
0 ≤ θ ≤ 2 π. Logo:
A(D) = 2
2π
0
(1 + sen(θ))2dθ = 6πu.a.
[4] Calcule a área da região limitada por r = sen(3θ).
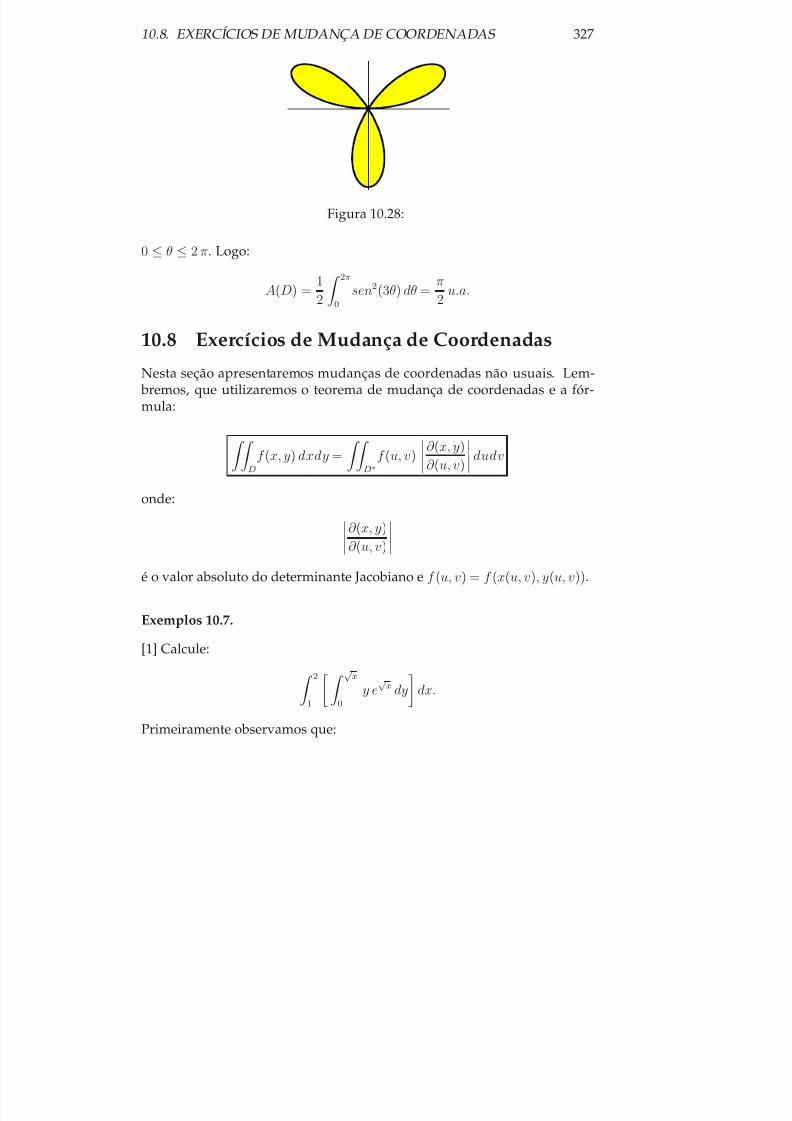
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 327/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 327
Figura 10.28:
0 ≤ θ ≤ 2 π. Logo:
A(D) = 1
2
2π
0
sen2(3θ) dθ = π
2 u.a.
10.8 Exercícios de Mudança de CoordenadasNesta seção apresentaremos mudanças de coordenadas não usuais. Lem-
bremos, que utilizaremos o teorema de mudança de coordenadas e a fór-mula:
D
f (x, y) dxdy =
D∗
f (u, v)
∂ (x, y)
∂ (u, v)
dudv
onde: ∂ (x, y)
∂ (u, v)
é o valor absoluto do determinante Jacobiano e f (u, v) = f (x(u, v), y(u, v)).
Exemplos 10.7.
[1] Calcule:
21
√ x
0 y e
√ x
dy
dx.
Primeiramente observamos que:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 328/407
328 CAPÍTULO 10. MUDANÇA DE COORDENADAS
21
√ x0
y e√
x dy
dx =
D
y e√
x dxdy,
onde D = {(x, y) / 1 ≤ x ≤ 2, 0 ≤ y ≤ √ x}; D é região de tipo I.
1 2
1
Figura 10.29: A região D.
Utilizemos a mudança de coordenadas:
x = u2
y = v;=⇒
x = 1 =⇒ u = 1
x = 2 =⇒ u =√
2
y = 0 =⇒ v = 0
y =√
x =⇒ v = u.
Logo, D∗ ={
(u, v) / 1≤
u≤
√ 2, 0
≤v ≤
u}
.
1 2
1
Figura 10.30: A região D∗.
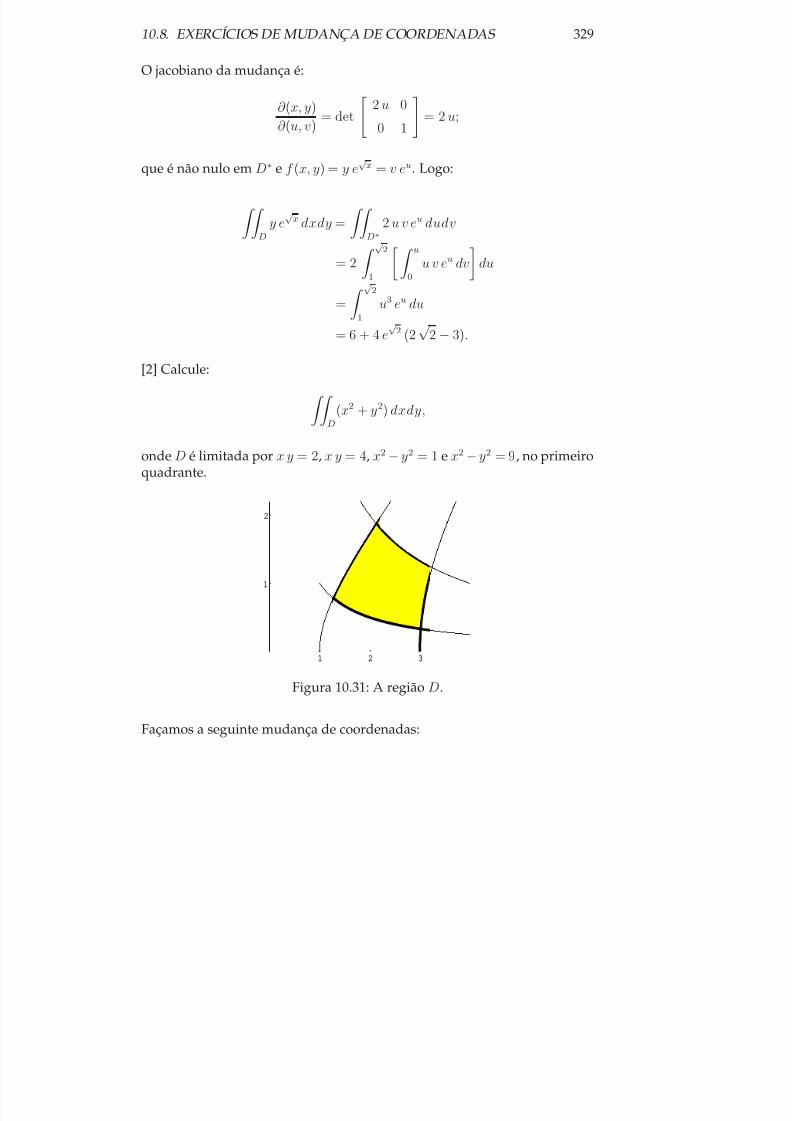
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 329/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 329
O jacobiano da mudança é:
∂ (x, y)
∂ (u, v) = det
2 u 0
0 1
= 2 u;
que é não nulo em D∗ e f (x, y) = y e
√ x
= v eu
. Logo:
D
y e√
x dxdy =
D∗
2 u v eu dudv
= 2
√ 21
u
0
u v eu dv
du
=
√ 21
u3 eu du
= 6 + 4 e√ 2 (2
√ 2
−3).
[2] Calcule:
D
(x2 + y2) dxdy,
onde D é limitada por x y = 2, x y = 4, x2 − y2 = 1 e x2 − y2 = 9, no primeiroquadrante.
1 2 3
1
2
1 2 3
1
2
Figura 10.31: A região D.
Façamos a seguinte mudança de coordenadas:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 330/407
330 CAPÍTULO 10. MUDANÇA DE COORDENADAS
u = x2 − y2
v = 2 x y.=⇒
x y = 2 =⇒ v = 4
x y = 4 =⇒ v = 8
x2 − y2 = 1 =⇒ u = 1
x2 − y2 = 9 =⇒ u = 9.
Então D∗ = [1, 9] × [4, 8]. Por outro lado:
∂ (u, v)
∂ (x, y) = det
2 x −2 y
2 y 2 x
= 4 (x2 + y2) =⇒ ∂ (x, y)
∂ (u, v) =
1
4 (x2 + y2);
logo:
(x2 + y2)
∂ (x, y)
∂ (u, v)
= 1
4,
e:
D
(x2 + y2) dxdy = 14
D∗
dudv
= 1
4
91
84
dv du
= 8.
[3] Calcule: D
(y + 2 x2) (y − x2) dxdy,
onde D é limitada por x y = 1, x y = 2, y = x2
e y = x2
− 1, no primeiroquadrante.
0.5 1.0 1.5 2.0
0.5
1.0
1.5
2.0
Figura 10.32: A região D.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 331/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 331
Façamos a seguinte mudança de coordenadas:
u = x y
v = y − x2 =⇒
x y = 1 =⇒ u = 1
x y = 2 =⇒ u = 2
y = x2 =⇒ v = 0
y = x2
−1 =
⇒v =
−1.
Então D∗ = [1, 2] × [−1, 0]. O jacobiano da mudança é:
∂ (u, v)
∂ (x, y) = det
y x
−2 x 1
= y + 2 x2 =⇒ ∂ (x, y)
∂ (u, v) =
1
y + 2 x2.
Então:
(y + 2 x2) (y − x2)
∂ (x, y)
∂ (u, v)
= v,
logo:
D
(y + 2 x2) (y − x2) dxdy =
D∗
vdudv
=
0−1
21
vdudv
= −1
2.
[4] Calcule:
D e−
x2
−x y
−y2
dxdy,
onde D é limitada por x2 + y2 + x y ≤ 1.
1 1
1
1
Figura 10.33: A região D.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 332/407
332 CAPÍTULO 10. MUDANÇA DE COORDENADAS
Completando os quadrados:
x2 + y2 + x y =
x + y
2
2+√
3 y
2
2.
Utilizemos a mudança linear de coordenadas:
u = x + y2
v =
√ 3 y
2
A região é dada por D∗ = {(u, v) / u2 + v2 ≤ 1}. Por outro lado, o jacobianoda mudança é:
∂ (u, v)
∂ (x, y) = det
1
1
2
0
√ 3
2
=√
3
2 =⇒ ∂ (x, y)
∂ (u, v) =
2√
3
3 .
Então:
D
e−x2−x y−y2dxdy = 2
√ 3
3
D∗
e−(u2+v2) dudv.
Utilizando coordenadas polares, temos que D∗∗ = {(r, θ) / 0 ≤ r ≤ 1, 0 ≤θ ≤ 2 π} e:
D
e−x2−x y−y2dxdy = 2 √ 33
D∗
e−(u2+v2) dudv
= 2
√ 3
3
D∗∗
e−r2 rdrdθ
= 2
√ 3
3
10
2π
0
r e−r2 dθdr
= 2 π
√ 3
3 (1 − e−1).
[5] Calcule: D
(x2 − y2) exy dxdy,

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 333/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 333
onde D é limitada por x y = 1, x y = 4, y = x e y = x + 2 no primeiroquadrante.
0.5 1.0 1.5 2.0 2.5 3.0
1
2
3
4
Figura 10.34: A região D.
Façamos a seguinte mudança de coordenadas:
u = x y
v = −x + y.=⇒
x y = 1 =⇒ u = 1
x y = 4 =⇒ u = 4
−x + y = 0 =⇒ v = 0
−x + y = 2 =⇒ v = 2.
Logo a região D∗ = [1, 4] × [0, 2]:
1 4
2
Figura 10.35: A região D∗.
O jacobiano da mudança é:
∂ (u, v)
∂ (x, y) = det
y x
−1 1
= x + y =⇒ ∂ (x, y)
∂ (u, v) =
1
x + y;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 334/407
334 CAPÍTULO 10. MUDANÇA DE COORDENADAS
observe que como x, y > 0, temos:
(x2 − y2) exy
∂ (x, y)
∂ (u, v)
= (x − y) (x + y) exy
x + y = (x − y) exy = −v eu.
Então:
D
(x2 − y2) exy dxdy = −
D∗
v eu dudv
= − 41
20
v eu dv du
= 2 (e − e4).
[6] Calcule:
D
ex3+y3
xy dxdy,
onde D = {(x, y) / y2 − 2 x ≤ 0, x2 − 2 y ≤ 0}.
2
2
Figura 10.36: A região D.
Façamos a seguinte mudança de coordenadas:x = u2 v
y = u v2.
Então: y2 − 2 x ≤ 0 =⇒ 0 ≤ v ≤ 3√
2
x2 − 2 y ≤ 0 =⇒ 0 ≤ u ≤ 3√
2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 335/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 335
A região D∗ = [0, 3√
2] × [0, 3√
2]. Por outro lado:
x3 + y3
xy = u3 + v3 e∂ (x, y)
∂ (u, v)
= 3 u2 v2.
Então:
D
ex3+y3
xy dxdy =
D∗
3 u2 v2 eu3+v3 dudv
= 3
D∗
u2 v2 eu3
ev3 dudv
= 3
3√ 20
3√ 20
u2 v2 eu3
ev3 du
dv
=
3√ 20
v2 ev3
eu3
3√ 2
0 dv
= (e2 − 1)
3√ 2
0
v2 ev3 dv
= 1
3 (e2 − 1)2.
[7] Calcule: D
x3 y3
1 − x4 − y4 dxdy,
onde D ={
(x, y) / x4 + y4
≤1}
, no primeiro quadrante.
1 1
1
1
Figura 10.37: A região D.
Façamos a seguinte mudança de coordenadas:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 336/407
336 CAPÍTULO 10. MUDANÇA DE COORDENADAS
x =
rcos(θ)
y =
r sen(θ).
O jacobiano da mudança é:
∂ (x, y)
∂ (r, θ) = 1
4
sen(θ)
cos(θ)
Então:
x3 y3
1 − x4 − y4
∂ (x, y)
∂ (r, θ)
= 1
4 cos(θ) sen(θ) r3
√ 1 − r2
Logo, D∗ = {(r, θ) / 0 ≤ r ≤ 1, 0 ≤ θ ≤ π
2} e:
D
x3 y3
1 − x4 − y4 dxdy = 14
D∗
cos(θ) sen(θ) r3 √ 1 − r2 drdθ
= 1
4
10
r3√
1 − r2 dr
π/2
0
cos(θ) sen(θ) dθ
= 1
60.
[8] Determine a área da região limitada por y2 = 2 p x, y2 = 2 q x, x2 = 2 r y ex2 = 2 s y tais que 0 < p < q e 0 < r < s.
Figura 10.38: A região D.
Façamos a seguinte mudança de coordenadas:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 337/407
10.8. EXERCÍCIOS DE MUDANÇA DE COORDENADAS 337
u = y2
2 x
v = x2
2 y
=⇒
y2 = 2 p x =⇒ u = p
y2 = 2 q x =⇒ u = q
x2 = 2 r y =⇒ v = r
x2 = 2 s y =⇒ v = s.
Então D∗ = [ p, q ] × [r, s]. Por outro lado:
∂ (u, v)
∂ (x, y) = det
− y2
2x2
y
x
x
y − x2
2y2
= −3
4 =⇒∂ (x, y)
∂ (u, v)
= 4
3.
Então:
A(D) =
D
dxdy =
D∗
4
3 dudv =
4
3 (q − p) (s − r).
[9] Determine a área da região limitada por:
x
a +
y
b = 1,
x
a +
y
b = 4,
y = b x
a e y =
9 b x
a , tal que a, b > 0.
Figura 10.39: A região D.
Façamos a seguinte mudança de coordenadas:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 338/407
338 CAPÍTULO 10. MUDANÇA DE COORDENADAS
u =
a y
b x
v = x
a +
y
b
=⇒
a y = b x =⇒ u = 1
a y = 9 b x =⇒ u = 3 x
a +
y
b = 1 =⇒ v = 1
xa
+ yb
= 4 =⇒
v = 4.
Então D∗ = [1, 3] × [1, 4]. Não é difícil calcular a inversa da transformaçãode coordenadas:
x = a v2
(1 + u)2
y = b u2 v2
(1 + u)2.
Logo:
∂ (x, y)
∂ (u, v) = det
− 2 v2 a
(1 + u)32 v a
(1 + u)2
2 u v2 b
(1 + u)32 u2 v b
(1 + u)2
= −4 a b u v3
(1 + u)4.
E:
A(D) = D
dxdy = D∗
4 a b u v3
(1 + u)4 dudv
=
31
41
4 a b u v3
(1 + u)4 dv
du
= 255 a b
31
u
(1 + u)4 du
= 935 a b
64 .
[10] Calcule o volume do sólido limitado pelo elipsóide:
x2
a2 + y2
b2 + z 2
c2 = 1;
onde a, b, c = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 339/407
10.9. OUTRAS APLICAÇÕES DA INTEGRAL DUPLA 339
Pela simetria do sólido calculamos o volume relativo ao primeiro octante;logo:
V = 8 c
D
1 −
x2
a2 +
y2
b2
dxdy.
A região D é limitada pela porção de elipse x2
a2 +
y2
b2 = 1 no primeiro qua-
drante. Usemos a seguinte mudança:
x = a r cos(θ)
y = b r sen(θ);
o determinante Jacobiano da mudança é:
∂ (x, y)
∂ (r, θ) = a cos(t)
−ar sin(t)
b sin(t) br cos(t)
= a b r.
Por outro lado:
1 −
x2
a2 +
y2
b2
=
√ 1 − r2.
A região D∗ = [0, 1] × [0, π
2]:
V = 8 a b c
D∗
r√
1 − r2 drdθ = 4 a b c π
10
r√
1 − r2 dr = 4 a b c π
3 u.v.
Em particular, se a = b = c, temos uma esfera de raio a e V = 4 π a3
3 u.v.
10.9 Outras Aplicações da Integral Dupla
Como em uma variável, outras aplicações, além do cálculo de volumes, po-dem ser definidas através de integrais duplas, tais como, massa total, centrode massa e momento de inércia.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 340/407
340 CAPÍTULO 10. MUDANÇA DE COORDENADAS
10.10 Massa Total
Suponha que uma lâmina fina tem a forma de uma região elementar D econsideremos que a massa está distribuida sobre D com densidade conhe-cida, isto é, existe uma função z = f (x, y) > 0 em D que representa a massapor unidade de área em cada ponto (x, y) ∈ D. Se a lâmina é feita de ma-
terial homogêneo, a densidade é constante. Neste caso a massa total dalâmina é o produto da densidade pela área da lâmina.
Quando a densidade f varia de ponto a ponto em D e f é uma função inte-grável sobre D, a massa total M (D) de D é dada por:
M (D) =
D
f (x, y) dxdy
10.11 Momento de MassaO momento de massa de uma partícula em torno de um eixo é o produto desua massa pela distância (na perpendicular) ao eixo. Então, os momentosde massa da lâmina D em relação ao eixo dos x e dos y são respectivamente:
M x =
D
y f (x, y) dx dy, M y =
D
x f (x, y) dxdy
x
y (x,y) D
Figura 10.40:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 341/407
10.11. MOMENTO DE MASSA 341
10.11.1 Centro de Massa
O centro de massa da lâmina é definido por (x, y), onde:
x = M yM (D)
, y = M xM (D)
Fisicamente (x, y) é o ponto em que a massa total da lâmina poderia estarconcentrada sem alterar seu momento em relação a qualquer dos eixos. Sef (x, y) = k, (k > 0) em todo D, (x, y) é chamado centróide de D. Neste casoo centro de massa é o centro geométrico da região D.
Exemplos 10.8.
[1] Calcule o centro de massa do retângulo [0, 1]×[0, 1] se a densidade é dadapela função: f (x, y) = ex+y.
A massa total de D = [0, 1] × [0, 1] é:
M (D) =
1
0
1
0
ex+y dx
dy = e2 − 2e + 1.
Os momentos de massa respectivos são:
M x =
10
10
y ex+y dx
dy = e − 1 e M y =
10
10
x ex+y dx
dy = e − 1
e o centro de massa de D é ( 1
e − 1,
1
e − 1).
[2] Determine o centro de massa da região limitada por um semicírculo Dde raio a centrado na origem, sabendo que sua densidade em cada ponto éproporcional à distância do ponto à origem.
Exe
Figura 10.41:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 342/407
342 CAPÍTULO 10. MUDANÇA DE COORDENADAS
f (x, y) = k
x2 + y2. Calculamos a massa total usando coordenadas pola-res. A nova região D∗ é definida por: 0 ≤ r ≤ a e 0 ≤ θ ≤ π;
x2 + y2 = r:
M (D) = k
π
0
a
0
r2 dr
dθ =
k π a3
3 .
Os momentos de massa respectivos são:
M x =
a
0
π
0
r3 cos(θ) dθ
dr = 0 e M y =
a
0
π
0
r3 sen(θ) dθ
dr =
a4
2 ;
o centro de massa de D é (0, 3 a
2 k π).
[3] Determine o centróide da região limitada pelas curvas y = x2 e y =4 x − x2.
1 2
4
2
1 2
4
2
Figura 10.42:
Neste caso f (x, y) = 1 para todo (x, y) ∈ D, onde:
D = {(x, y) ∈ R2/0 ≤ x ≤ 2, x2 ≤ y ≤ 4 x − x2}
e M (D) = A(D) = 8
3. Esta área já foi calculada anteriormente.
M x =
20
4x−x2
x2y dy
dx =
16
3 e M y =
20
4x−x2
x2x dy
dx =
8
3;
o centróide de D é (2, 1).
[4] Determine o centro de massa da região limitada pelas curvas y = x + x2,y = 0 e x = 2 se a densidade em cada ponto é Exe f (x, y) = y
1+x.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 343/407
10.12. MOMENTO DE INÉRCIA 343
M (D) =
20
x(x+1)
0
y
1 + xdy
dx =
1
2
20
(x3 + x2) dx = 10
3 ,
M x = 20 x(x+1)
0
y2
1 + xdy
dx =
1
2 20 (x
4
+ x3
) dx =
412
45 ,
M y =
20
x(x+1)
0
x y
1 + xdy
dx =
1
3
20
(x5 + 2 x4 + x3) dx = 26
5 ;
o centro de massa de D é (39
25, 206
75 ).
10.12 Momento de Inércia
Sejam L uma reta no plano, D uma lâmina como antes e δ (x, y) = d((x, y), L),onde d é a distância no plano e (x, y) ∈ D.
D
L(x,y)
δ
Figura 10.43:
Se f (x, y) é a densidade em cada ponto de D, o momento de inércia dalâmina em relação à reta L é:
I L = D
δ 2(x, y) f (x, y) dxdy
Em particular, se L é o eixo dos x:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 344/407
344 CAPÍTULO 10. MUDANÇA DE COORDENADAS
I x =
D
y2 f (x, y) dxdy
Se L é o eixo dos y:
I y =
Dx2 f (x, y) dxdy
O momento de inércia polar em relação à origem é:
I 0 = I x + I y =
D
(x2 + y2) f (x, y) dxdy
O momento de inércia de um corpo em relação a um eixo é sua capacidadede resistir à aceleração angular em torno desse eixo.
Exemplos 10.9.
[1] Determine o momento de inércia polar da região limitada pelas curvasy = ex, x = 1, y = 0 e x = 0, se a densidade em cada ponto é f (x, y) = x y.
I x =
D
xy3 dxdy =
10
ex
0
x y3 dy
dx =
1
64(3 e4 + 1),
I y =
D
yx3 dxdy =
10
ex
0
y x3 dy
dx =
1
16(e2 + 3);
logo, o momento de inércia polar é:
I 0 = I x + I y = 1
64(3 e4 + 4 e2 + 13).
[2] Uma lâmina fina com densidade constante k é limitada por x2 + y2 = a2
e x2 + y2 = b2, (0 < a < b). Calcule o momento de inércia polar da lâmina.
Usando coordenadas polares, a nova região é definida por: a ≤ r ≤ b e0 ≤ θ ≤ 2 π e o momento de inércia polar é:
I 0
= k 2π
0 b
a
r3 drdθ = k (b4 − a4)π
2 .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 345/407
10.13. EXERCÍCIOS 345
10.13 Exercícios
1. Determine o volume dos seguintes sólidos:
(a) Limitado superiormente por z = x2 + y2 e inferiormente pela re-gião limitada por y = x2 e x = y2.
(b) Limitado superiormente por z = 3 x2 + y2 e inferiormente pelaregião limitada por y = x e x = y2 − y.
(c) Limitado por y2 + z 2 = 4 , x = 2 y, x = 0 e z = 0, no primeirooctante.
(d) Limitado por z = x2 + y2 + 4 , x = 0, y = 0, z = 0 e x + y = 1.
(e) Limitado por x2 + y2 = 1 , y = z , x = 0 e z = 0, no primeirooctante.
2. Calcule a área da região limitada pelo eixo dos y e as curvas y = sen(x)
e y = cos(x).3. Calcule a área das regiões limitadas pelas seguintes curvas:
(a) y = x2, y = 2x + 54
(b) y = −x2 − 4, y = −8
(c) y = 5 − x2, y = x + 3
(d) x = y2, y = x + 3, y =−2, y = 3
(e) y3 = x, y = x
(f) y = −x2 − 1, y = −2x − 4
(g) x = y2 + 1, y + x = 7
(h) y = 4 − x2, y = x2 − 14
4. Determine o centro de massa da lâmina plana R, no plano xy e densi-dade dada f :
(a) R é limitado por x2 + y2 =1 no primeiro quadrante ef (x, y) = x y
(b) R é limitado por y = x ey = x2 e f (x, y) = x2 + y2
5. Definimos o valor médio de f sobre a região D por:
V M = 1
A
D f (x, y) dxdy,
onde A é a área de D. Calcule V M se:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 346/407
346 CAPÍTULO 10. MUDANÇA DE COORDENADAS
(a) f (x, y) = x2, e D do retângulo de vértices (0, 0), (4, 0), (4, 2) e (0, 2)
(b) f (x, y) = x2 y2 e D do retângulo de vértices (0, 0), (4, 0), (4, 2) e(0, 2)
(c) f (x, y) = x2 y2 e D do triângulo de vértices (0, 0), (4, 0), e (0, 2)
(d) f (x, y) = x2 y2 e D do triângulo de vértices (−1, 0), (1, 0), e (0, 1)
Mudanças de Variáveis
1. Utilizando a mudança de variáveis: x = u + v e y = u − v, calcule:
10
10
x2 + y2
dx
dy.
2. Utilizando a mudança de variáveis: x + y = u e x − y = v, calcule:
D
x + y2 (x − y)2 dxdy,
onde D é limitado pelo quadrado de vértices (1, 0), (2, 1) e (0, 1).
3. Utilizando a mudança de variáveis: u = x − y e v = x + y, calcule:
D
x2 − y2
sen2(x + y) dxdy,
onde D = {(x, y)/ − π ≤ x + y ≤ π, −π ≤ x − y ≤ π}.
4. Utilizando coordenadas polares, calcule as seguintes integrais duplas:
(a)
D
ex2+y2 dxdy, sendo D = {(x, y)/x2 + y2 ≤ 1}
(b)
D
ln(x2 + y2) dxdy, sendo D = {(x, y)/x ≥ 0, y ≥ 0, a2 ≤ x2 +
y2 ≤ b2}
(c)
D
sen(
x2 + y2)
x2 + y2
dxdy, sendo D limitadas por x2 + y2 = π2
4 e
x2 + y2 = π2
5. Calcule a área da região limitada pelas seguintes curvas: x = 4 − y2 ex + 2 y − 4 = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 347/407
10.13. EXERCÍCIOS 347
6. Utilizando coordenadas polares, calcule a área da região limitada pe-las curvas:
(a) r = 1 e r = 2cos(θ)√ 3
(fora a circunferência r = 1).
(b) r = 2 (1 + cos(θ)) e r = 2 cos(θ).
(c) r = 2 (1−
cos(θ)) e r = 2.
7. Calcule
D
sen(x2 + y2) dxdy, sendo D o disco unitário centrado na
origem.
8. Sendo dadas a parábola y2 = x+1 e a reta x+y = 1, calcule o momentode inércia em relação a cada eixo e o momento de inércia polar.
9. Calcule
D
(x2 − y2) dxdy, onde D é a região limitada por x2 + y2 ≤ 1,
y ≥ 0 e x2 + y2 = 2.
10. Calcule
D
y + 1
x2 + (y + 1)2 dxdy, onde D é a região limitada por x2 +
y2 ≤ 1 e y ≥ 0.
11. Calcule
D
y ln(x + y)
x2 dxdy, onde D é a região limitada por x+y = 1,
x + y = 2, y = x e y = 0.
12. Determine a área da região limitada por x2 + 3 y2 − 2 x − 6 y + 1 = 0.
13. Determine a área da região limitada por x y = 4, x y = 8, x y3 = 5 e
x y
3
= 15.14. Calcule
D
cos(x + 2 y) sen(x − y) dxdy, onde D é a região limitada
por y = x, x + 2 y = 2 e y = 0.
15. Calcule
D
x + y
x − 2 y dxdy, onde D é a região limitada por y = 0,
2 y = x e y = 1 − x.
16. Determine o momento de inércia polar da região limitada por x2−y2 =1, x2 − y2 = 9, x y = 2 e x y = 4.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 348/407
348 CAPÍTULO 10. MUDANÇA DE COORDENADAS

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 349/407
Capítulo 11INTEGRAÇÃO TRIPLA
11.1 Integração Tripla sobre Paralelepípedos
Este capítulo é totalmente análogo ao anterior.
Sejam R ⊂ R3 o paralelepípedo retangular definido por:
R = [a, b] × [c, d] × [ p, q ]
e a função limitada w = f (x,y,z ) definida em R.
Consideremos as seguintes partições de ordem n dos intervalos: [a, b], [c, d]
e [ p, q ]:
a = x0 < x1 < ...... . . . . . . < xn = b
c = y0 < y1 < ...... . . . . . . < yn = d
p = z 0 < z 1 < ...... . . . . . . < z n = q.
Subdividamos R em n3 sub-paralelepípedos:
Rijk = [xi, xi+1] × [y j, y j+1] × [z k, z k+1].
349

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 350/407
350 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
b
c d
a
p
q
R
Figura 11.1: Subdivisão de R.
Denotemos por:
∆x = b − an , ∆y = d − cn , ∆z = q − pn .
Escolhamos cijk ∈ Rijk e formemos a seguinte soma de Riemann:
S n =n−1i=0
n−1 j=0
n−1k=0
f (cijk )∆x ∆y ∆z.
Definição 11.1. Se limn→+∞
S n existe e é independente da escolha dos cijk ∈ Rijk
e da partição, denominamos este limite de integral tripla de f sobre R e a
denotamos por:
limn→+∞
S n =
R
f (x,y,z ) dxdydz
Em tal caso f é dita integrável sobre R.
Teorema 11.1. Se f é contínua em R, então f é integrável sobre R.
Para a prova do teorema veja [EL].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 351/407
11.1. INTEGRAÇÃO TRIPLA SOBRE PARALELEPÍPEDOS 351
Observação 11.1.
No capítulo anterior vimos que se:
f : [a, b] × [c, d] −→ R,
f (x, y) ≥ 0 e contínua para todo (x, y) ∈ [a, b] × [c, d], a integral dupla:
R
f (x, y) dxdy
representa o volume do sólido:
W = {(x,y,z ) ∈ R3 / (x, y) ∈ [a, b] × [c, d], 0 ≤ z ≤ f (x, y)}.
Para integrais triplas esta interpretação geométrica não é conveniente, poiso gráfico de f é um subconjunto de R4 o qual não é possível visualizar.
Mas se f (x,y,z ) = 1 para todo (x,y,z ) ∈ R:
R
dxdydz
representa o volume de R (veja o exemplo 1). Isto se justifica, pois a somade Riemann correspondente:
S n =n−1i=0
n−1 j=0
n−1k=0
∆x ∆y ∆z
é a soma dos volumes dos n3 sub-paralelepípedos formado pela partição;então:
limn→+∞ S n
é exatamente o volume de R.
A integral tripla tem propriedades análogas às das integrais duplas.
Proposição 11.1. Seja x = (x,y,z ) ∈ R.
1. Linearidade da integral tripla. Se f e g são funções integráveis sobreR, então para todo α, β ∈ R, α f + β g é integrável sobre R, e:
R
α f (x
) + β g(x
)
dxdydz = α
Rf (x
) dxdydz + β
Rg(x
) dxdydz
onde x = (x,y,z ).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 352/407
352 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
2. Se f e g são integráveis sobre R e g(x) ≤ f (x), para todo x ∈ R, então:
R
g(x) dxdydz ≤
R
f (x) dxdydz
3. Se R é subdividido em k paralelepípedos e f é integrável sobre cada
Ri, i = 1,...,k então f é integrável sobre R e,
R
f (x) dxdydz =k
i=1
Ri
f (x) dxdydz
A prova segue diretamente das definições.
Observações 11.1.
1. A noção de conteúdo nulo poder ser estendida ao paralelepípedo R deforma completamente análoga ao caso do retângulo; mudando sub-retângulos por sub-paralelepípedos e área por volume.
2. Como antes, o teorema é válido se o conjunto de descontinuidades def é de conteúdo nulo.
3. Para integrais triplas continua valendo o teorema de Fubini. Agoratemos 3 ! = 6 possíveis integrais iteradas.
Teorema 11.2. (Fubini) Seja f : R −→ R contínua em R. Então:
R
f (x,y,z ) dxdydz =
b
a
d
c
q
p
f (x,y,z ) dz
dy
dx
=
q
p
d
c
b
a
f (x,y,z ) dx
dy
dz
=
d
c
b
a
q
p
f (x,y,z ) dz
dx
dy
= b
a
q
p
d
c f (x,y,z ) dy
dz
dx
= ..................

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 353/407
11.2. INTEGRAIS TRIPLAS SOBRE REGIÕES MAIS GERAIS 353
A prova do teorema de Fubini para integrais triplas é completamente aná-loga à das integrais duplas, que pode ser vista no apêndice.
Exemplos 11.1.
[1] Calcule R
dxdydz , onde R = [a, b]
×[c, d]
×[ p, q ].
R
dxdydz =
b
a
q
p
d
c
dy
dz
dx = (d − c) (q − p) (b − a),
que é o volume de R.
[2] Calcule
R
xyz dx dy dz , onde R = [0, 1] × [1, 2] × [0, 3].
R
xyzdxdydz =
21
10
30
xyz dz
dx
dy =
9
2
21
10
x y d x
dy =
27
8 .
[3] Calcule
R
sen(x + y + z ) dxdydz , onde R = [0, π] × [0, π] × [0, π].
R
sen(x + y + z ) dxdydz =
π
0
π
0
π
0
sen(x + y + z ) dz
dx
dy = −8.
[4] Calcule
R
(x2 + y2 + z 2 + x y z ) dxdydz , onde R = [0, 1] × [0, 1] × [0, 1].
R
(x2
+ y2
+ z 2
+ x y z ) dxdydz = 10
10
10
(x2
+ y2
+ z 2
+ xyz ) dz
dx
dy
=
10
10
(x2 + y2 + 1
3 +
1
2 x y)) dx
dy
=
10
(2
3 +
y
4 + y2) dy =
9
8.
11.2 Integrais Triplas sobre Regiões mais Gerais
11.2.1 7.2.1 Regiões Elementares no Espaço
De forma análoga ao estudado no capítulo das integrais duplas definidasem regiões mais gerais. Consideremos W ⊂ R3.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 354/407
354 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
11.2.2 Regiões de tipo I
A região W é do tipo I se pode ser descrita por:
W ={
(x,y,z )∈R3/(x, y)
∈D, f 1(x, y)
≤z ≤
f 2(x, y)}
onde D é a região elementar do plano, projeção de W no plano xy e f 1, f 2 :D −→ R contínuas, sendo f 1 ≤ f 2.
D
W
z=f
z=f
2
1
Figura 11.2: Região de tipo I.
11.2.3 Regiões de tipo II
W é do tipo II se pode ser descrita por:
W = {(x,y,z ) ∈ R3/(x, z ) ∈ D, g1(x, z ) ≤ y ≤ g2(x, z )}
onde D é a região elementar do plano, projeção de W no plano xz e g1, g2 :D −→ R contínuas, sendo g1 ≤ g2.
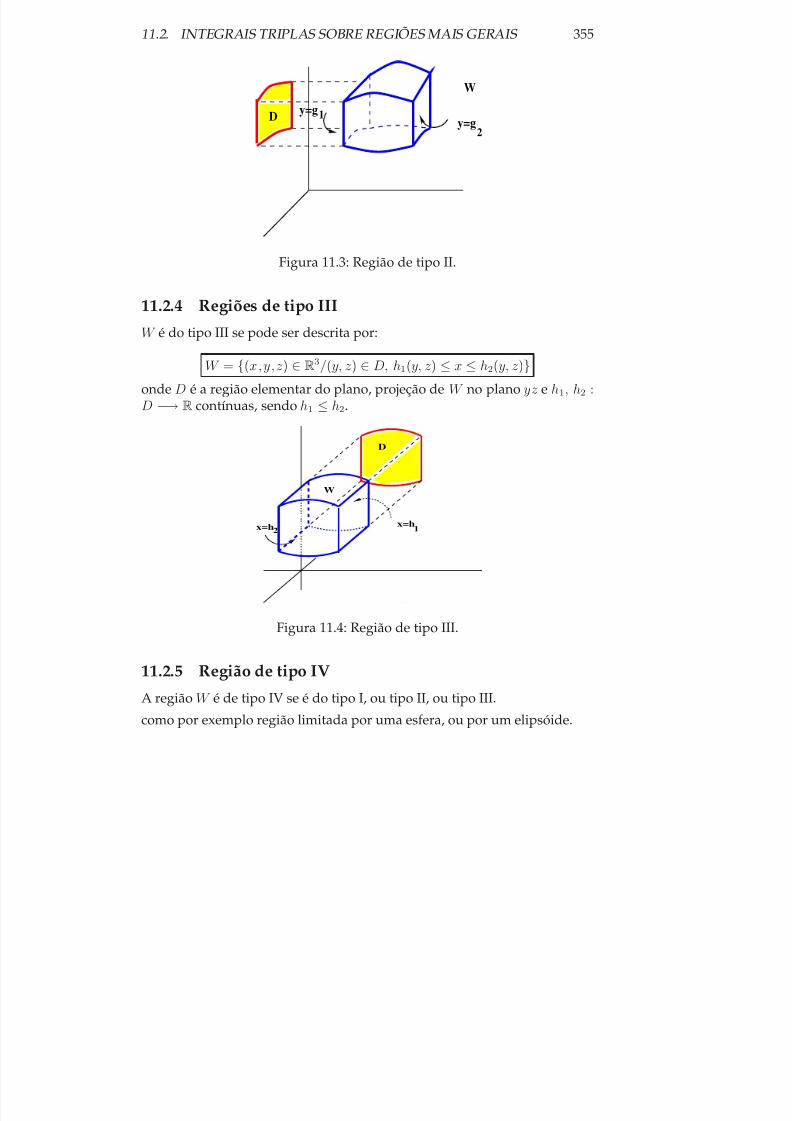
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 355/407
11.2. INTEGRAIS TRIPLAS SOBRE REGIÕES MAIS GERAIS 355
W
y=gy=g
2
1D
Figura 11.3: Região de tipo II.
11.2.4 Regiões de tipo III
W é do tipo III se pode ser descrita por:
W = {(x,y,z ) ∈ R3/(y, z ) ∈ D, h1(y, z ) ≤ x ≤ h2(y, z )}onde D é a região elementar do plano, projeção de W no plano yz e h1, h2 :D −→ R contínuas, sendo h1 ≤ h2.
W
D
x=hx=h 12
Figura 11.4: Região de tipo III.
11.2.5 Região de tipo IV
A região W é de tipo IV se é do tipo I, ou tipo II, ou tipo III.como por exemplo região limitada por uma esfera, ou por um elipsóide.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 356/407
356 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
Observações 11.2.
1. Em qualquer dos casos anteriores, W é chamada região elementar doespaço.
2. As regiões W são conjuntos fechados e limitados em R
3
.
Alguns exemplos de regiões elementares:
Figura 11.5: Região elementar.
De tipo III:
Figura 11.6: Região elementar.
Em geral:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 357/407
11.3. EXTENSÃO DA INTEGRAL TRIPLA 357
Figura 11.7: Região elementar.
11.3 Extensão da Integral Tripla
Seja W uma região elementar em R3 tal que W
⊂ R, R um paralelepípedo
como antes. Se f : W −→ R é uma função contínua, definamos f ∗ : R −→ Rpor
f ∗(x,y,z ) =
f (x,y,z ) se (x,y,z ) ∈ W
0 se (x,y,z ) ∈ R − W.
Se ∂W tem conteúdo nulo, então, f ∗ é integrável sobre R e definimos a inte-gral tripla de f sobre W como:
W
f (x,y,z ) dxdydz = Rf ∗(x,y,z ) dxdydz.
Em tal caso dizemos que f é integrável sobre W . A integral não depende daescolha do paralelepípedo R.
Proposição 11.2. Seja f : W ⊂ R3 −→ R contínua.
1. Se W é do tipo I:
W
f (x,y,z ) dxdydz =
D
f 2(x,y)
f 1(x,y)
f (x,y,z ) dz
dxdy
2. Se W é do tipo II:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 358/407
358 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
W
f (x,y,z ) dxdydz =
D
g2(x,z)
g1(x,z)
f (x,y,z ) dy
dxdz
3. Se W é do tipo III:
W
f (x,y,z ) dxdydz =
D
h2(y,z)
h1(y,z)
f (x,y,z ) dx
dy dz
Observação 11.2.
Observe que em todos os casos anteriores D é uma região elementar doplano e, portanto, pode ser do tipo I, II ou III; dependendo do tipo continu-amos com a integral dupla.
Volume : Em particular, se f (x,y,z ) = 1 para todo (x,y,z ) ∈ W , então:
W
dxdydz = V (W )
onde V (W ) é o volume de W .
Exemplos 11.2.
[1] Calcule I =
20
4−x2
0
x
0
sen(2 z )
4 − z dy dz dx.
Note que:
I =
D
x
0
sen(2 z )
4 − z dy
dz dx,
onde:
D = {(x, z ) / 0 ≤ x ≤ 2, 0 ≤ z ≤ 4 − x2}.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 359/407
11.3. EXTENSÃO DA INTEGRAL TRIPLA 359
0.5 1.0 1.5 2.0
1
2
3
4
Figura 11.8:
Calculamos primeiro:
x
0
sen(2 z )4 − z
dy = xsen(2 z )4 − z
;
a seguir, precisamos calcular:
I =
D
xsen(2 z )
4 − z dz dx,
onde consideramos D = {(x, z ) / 0 ≤ x ≤ √ 4 − z, 0 ≤ z ≤ 4} como umaregião de tipo III; logo,
I =
40
√ 4−z
0
xsen(2 z )
4 − z dxdz =
40
sin(2 z )
2 dz =
1 − cos(8)
4 .
[2] Calcule o volume do sólido limitado superiormente por z + x2 = 9 einferiormente z + y = 4, tal que y = 0 e y = 4.
O sólido W é limitado superiormente por z = 9 − x2 e inferiormente porz = 4 − y. O sólido W é do tipo I.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 360/407
360 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
x
y
z
Figura 11.9: Sólido do exemplo [2].
W = {(x,y,z ) ∈ R3/(x, y) ∈ D, 4 − y ≤ z ≤ 9 − x2},
Determinação de D: A região D é a projeção de W no plano xy ; para de-terminar D basta eliminarmos z das equações ou, equivalentemente achar ainterseção de ambas as superfícies:
z = 9 − x2
z = 4 − y;
obtemos x2 = y + 5 e D = {(x, y) ∈ R2/ − √ y + 5 ≤ x ≤ √
y + 5, 0 ≤ y ≤ 4}.
3 2 1 1 2 3
4
2
2
4
Figura 11.10: A região D.
Logo, V (W ) =
W
dxdydz =
40
√ y+5
−√ y+5
9−x2
4−y
dz
dx
dy; então:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 361/407
11.3. EXTENSÃO DA INTEGRAL TRIPLA 361
V (W ) =
40
√ y+5
−√ y+5
5 − x2 + y
dx
dy =
40
5x − x3
3 + x y
√ y+5
−√ y+5
dy
=
4
3 40 (y + 5)
3
2 dy =
8
15 (y + 5)
5
24
0
= 648
5 − 40
√ 5
3 u.v.
[3] Calcule
W
xdxdydz onde W é limitado por z = x2 + y2, z = 2, no
primeiro octante.
Se considerarmos W como região de tipo II, W é definida por 0 ≤ y ≤√ z − x2 e D é a projeção de W no plano xz ; fazendo y = 0 obtemos a pa-
rábola z = x2 e z = 2; logo, D é definida por 0 ≤ x ≤ √ z e 0 ≤ z ≤ 2,
logo:
W = {(x,y,z ) / 0 ≤ x ≤ √ z, 0 ≤ y ≤
√ z − x2, 0 ≤ z ≤ 2}.
0
1
2
3x
0
12
3y
0
1
2
3
4
z
0
1
2
0
12
1
2
1
1
2
1
Figura 11.11: O sólido e a região do exemplo [2].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 362/407
362 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
W
xdxdydz =
20
√ z0
√ z−x2
0
x dy
dx
dz
=
2
0
√ z
0 x√
z − x2
dx
dz
= 13
2
0
z 32 dz
= 8
√ 2
15 .
Se consideramos W como região I:
W = {(x,y,z ) / 0 ≤ x ≤√
2, 0 ≤ y ≤√
2 − x2, x2 + y2 ≤ z ≤ 2}.
1
1
Figura 11.12: A região do exemplo [2], no plano xy.
√ 20
√ 2−x2
0
√ 2x2+y2
x dz
dy
dx =
8√
2
15 .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 363/407
11.4. EXERCÍCIOS 363
11.4 Exercícios
1. Calcule as seguintes integrais:
(a) 3
0 2
0 1
0
(x2 + y2 + z 2) dxdydz
(b)
1
−1
1
−1
1
−1x2 y2 z 2 dxdydz
(c) 10
x
0
xy
0
xdzdydx
(d) 40
π
0
1−x
0
x2 sen(y) dzdxdy
(e) π
2
0
y
0
1y
0
sen(y) dzdxdy
(f) 1−2
x
0
y
0
x2 z 4 dzdydx
2. Considere o sólido limitado por x + y + z = 3, x + y − z = 1 e os planoscoordenados. Calcule o volume do sólido, fazendo:
(a)
dz
dy
dx
(b) dxdydz
(c)
dy
dx
dz
(d)
dx
dz
dy
3. Calcule
W
xdxdydz se W é o paralelepípedo limitado pelos pla-
nos x = 2, y = 3 e z = 1.
4. Calcule
W
z 2 dxdydz se W é o sólido limitado pelo cilindro x2 +
y2 = 1 e pelos planos z = 0 e z = 4.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 364/407
364 CAPÍTULO 11. INTEGRAÇÃO TRIPLA
5. Calcule
W
dxdydz
(x + y + z + 1)3 se W é o sólido limitado pelo plano
x + y + z = 1 e pelos planos coordenados.
6. Calcule
W
(x3+y3+z 3) dxdydz se W é o sólido limitado pela esfera:
(x − a)2
+ (y − a)2
+ (z − a)2
= a2
.
7. Calcule
W
z
x2 + y2 dxdydz se W é o sólido limitado pelo cilin-
dro x2 + y2 = 2 x e os planos y = 0, z = 0 e z = a.
8. Determine o volume do sólido limitado pelos planos 4 y + 2 x + z = 8,x = 0, y = 0 e z = 0.
9. Determine o volume do sólido limitado por z = 9−x2, z = 5−y, y = 0e y = 5.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 365/407
Capítulo 12
MUDANÇA DE COORDENADAS
12.1 Introdução
Sejam W ∗ uma região elementar no espaço e x, y e z as seguintes funções:
x, y, z : W ∗ −→ R,
onde x = x(u,v,w), y = y(u,v,w) e z = z (u,v,w) são funções contínuase com derivadas parciais contínuas num paralelepípedo aberto R tal queW ∗ ⊂ R, Estas três funções determinam uma transformação do espaço uvwno espaço xyz . De fato:
T : W ∗ −→ R3,
onde T (u,v,w) = (x(u,v,w), y(u,v,w), z (u,v,w)).
A transformação T é também denotada por:
x = x(u,v,w)
y = y(u,v,w)
z = z (u,v,w), (u,v,w) ∈ W ∗
Denotemos a imagem de W ∗ por T como W = T (W ∗), contida no espaçoxyz .
Definição 12.1.
1. T é injetiva em W ∗ se
T ((u1, v1, w1)) = T ((u2, v2, w2))
365

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 366/407
366 CAPÍTULO 12. MUDANÇA DE COORDENADAS
para todos (u1, v1, w1), (u2, v2, w2) ∈ W ∗ implica em u1 = u2, v1 = v2 ew1 = w2.
2. O determinante Jacobiano de T é denotado e definido por:
∂ (x,y,z )
∂ (u,v,w) = det
∂x
∂u
∂x
∂v
∂x
∂w
∂y
∂u
∂y
∂v
∂y
∂w
∂z
∂u
∂z
∂v
∂z
∂w
,
onde as derivadas parciais são calculadas no ponto (u,v,w) ∈ W ∗.
Teorema 12.1. Sejam W e W ∗ regiões elementares no espaço, T uma trans-formação de classe C 1 e injetiva em W ∗. Suponha que T (W ∗) = W . Entãopara toda função integrável f sobre W temos:
W
f (x,y,z ) dxdydz =
W ∗
f (u,v,w)
∂ (x,y,z )
∂ (u,v,w)
dudvdw
onde f (u,v,w) = f (x(u,v,w), y(u,v,w), z (u,v,w)) e:
∂ (x,y,z )
∂ (u,v,w)
é o valor absoluto do determinante Jacobiano.
Observação 12.1. Novamente, é possível mostrar que o teorema anterior éainda válido se T não é injetiva num subconjunto de W ∗ que seja de con-teúdo nulo.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 367/407
12.2. COORDENADAS CILÍNDRICAS 367
12.2 Coordenadas Cilíndricas
Se P = (x,y,z ) é um ponto no espaço xyz , suas coordenadas cilíndricas são(r,θ,z ), onde (r, θ) são as coordenadas polares da projeção de P no plano xye são definidas por:
x = rcos(θ),y = rsen(θ),
z = z,
ou, explicitamante r =
x2 + y2, z = z e:
θ =
arctgy
x
se x, y > 0,
π + arctgy
x
se x < 0,
2π + arctgy
x se x > 0, y < 0.
Se x = 0, então θ = π
2 quando y > 0 e θ =
3π
2 quando y < 0. Se x = y = 0, θ
não é definido.
(x,y,z)
rθ
(x,y,0)
Figura 12.1: Coordenadas cilíndricas.
Esta transformação é injetiva no seguinte subconjunto:
{(r,θ,z )/r > 0, θ0 < θ < θ0 + 2π, z ∈ (−∞, +∞)}e o jacobiano da transformação é:
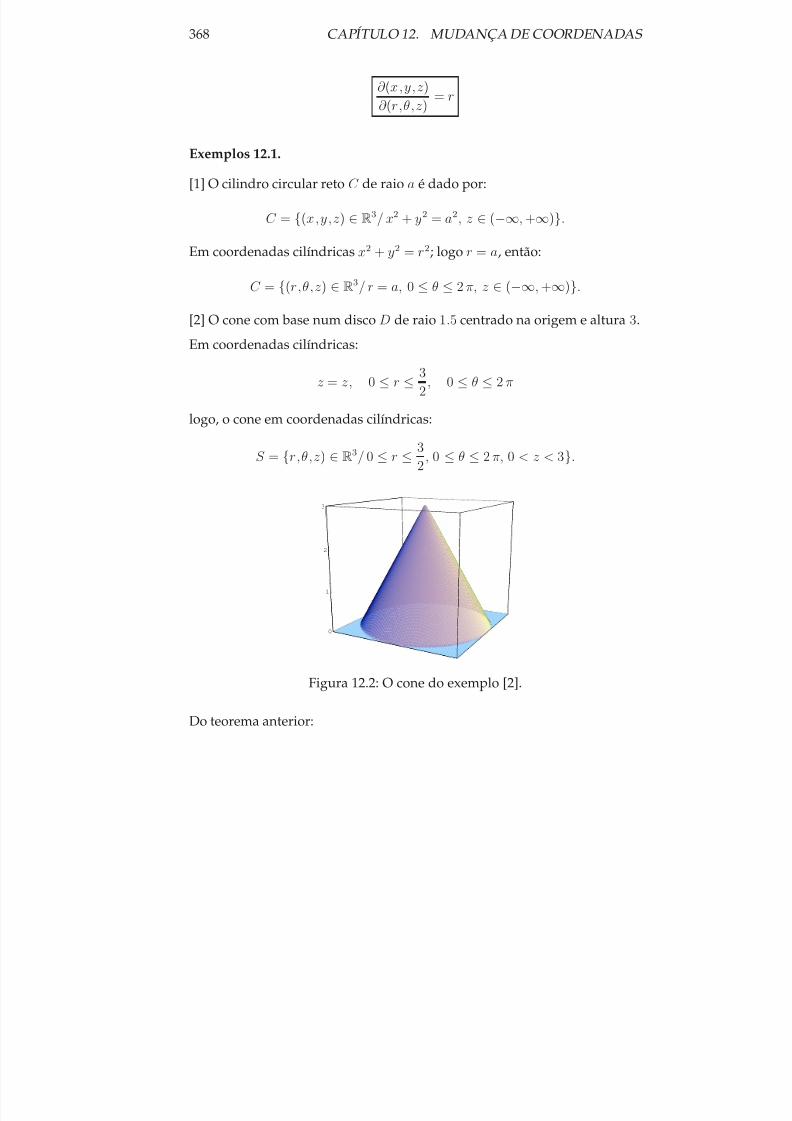
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 368/407
368 CAPÍTULO 12. MUDANÇA DE COORDENADAS
∂ (x,y,z )
∂ (r,θ,z ) = r
Exemplos 12.1.
[1] O cilindro circular reto C de raio a é dado por:
C = {(x,y,z ) ∈ R3/ x2 + y2 = a2, z ∈ (−∞, +∞)}.
Em coordenadas cilíndricas x2 + y2 = r2; logo r = a, então:
C = {(r,θ,z ) ∈ R3/ r = a, 0 ≤ θ ≤ 2 π, z ∈ (−∞, +∞)}.
[2] O cone com base num disco D de raio 1.5 centrado na origem e altura 3.
Em coordenadas cilíndricas:
z = z, 0 ≤ r ≤ 3
2, 0 ≤ θ ≤ 2 π
logo, o cone em coordenadas cilíndricas:
S = {r,θ,z ) ∈ R3/ 0 ≤ r ≤ 3
2, 0 ≤ θ ≤ 2 π, 0 < z < 3}.
0
1
2
3
Figura 12.2: O cone do exemplo [2].
Do teorema anterior:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 369/407
12.2. COORDENADAS CILÍNDRICAS 369
Corolário 12.2. Seja f (r,θ,z ) = f (rcos(θ),rsen(θ), z ); então:
W
f (x,y,z ) dxdydz =
W ∗
r f (r,θ,z ) dr dz dθ
Esta igualdade ainda é válida se
W ∗ = {(r,θ,z )/r ≥ 0, θ0 ≤ θ ≤ θ0 + 2π, z ∈ (−∞, +∞)}.
Em particular, se f (x,y,z ) = 1 para todo (x,y,z, ) ∈ W , então:
V (W ) =
W ∗
rdzdrdθ.
Exemplos 12.2.
[1] Determine o volume do sólido limitado por x2 + y2 = a2
, z = 0
e z = b
;a, b = 0.
O sólido W é um cilindro centrado na origem, de raio a e altura z onde0 ≤ z ≤ b. Usando coordenadas cilíndricas obtemos a nova região W ∗
definida por:
W ∗ = {(r,θ,z ) / 0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π, 0 ≤ z ≤ b} = [0, a] × [0, 2π] × [0, b].
V (W ) = W
rdzdrdθ = b
0
2π
0
a
0
r dr dθ dz = π a2 b u.v.
[2] Calcule
W
xdxdydz , onde W é limitado superiormente por z = 4 e
inferormente por z = x2 + y2, tal que x = 0 e y = 0.
O sólido W é definido por:
W = {(x,y,z )/(x, y) ∈ D, x2 + y2 ≤ z ≤ 4}.
Para determinar D resolvemos o sistema:z = x2 + y2
z = 4=⇒ x2 + y2 = 4.
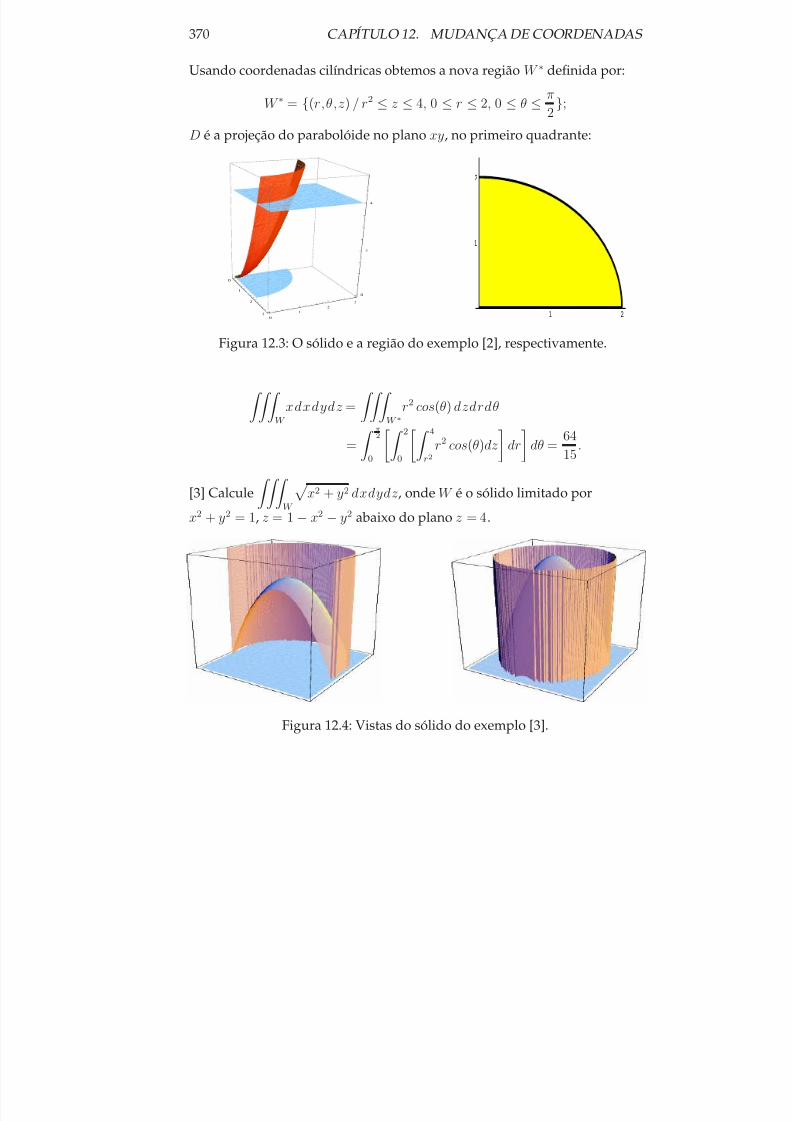
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 370/407
370 CAPÍTULO 12. MUDANÇA DE COORDENADAS
Usando coordenadas cilíndricas obtemos a nova região W ∗ definida por:
W ∗ = {(r,θ,z ) / r2 ≤ z ≤ 4, 0 ≤ r ≤ 2, 0 ≤ θ ≤ π
2};
D é a projeção do parabolóide no plano xy, no primeiro quadrante:
0
1
2
3
0
1
2
3
0
2
4
1 2
2
1
1 2
2
1
Figura 12.3: O sólido e a região do exemplo [2], respectivamente.
W
xdxdydz =
W ∗
r2 cos(θ) dzdrdθ
=
π2
0
20
4r2
r2 cos(θ)dz
dr
dθ =
64
15.
[3] Calcule
W x2 + y2 dxdydz , onde W é o sólido limitado por
x2
+ y2
= 1, z = 1 − x2
− y2
abaixo do plano z = 4.
Figura 12.4: Vistas do sólido do exemplo [3].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 371/407
12.2. COORDENADAS CILÍNDRICAS 371
W é determinado por 1 − x2 − y2 ≤ z ≤ 4. A projeção no plano xy é limitadapor x2 + y2 ≤ 1.
1-1
-1
1
1-1
-1
1
Figura 12.5: A região D.
Usando coordenadas cilíndricas obtemos a nova região W ∗ determinadapor:
W ∗ = {(r,θ,z ) / 1 − r2 ≤ z ≤ 4, 0 ≤ r ≤ 1, 0 ≤ θ ≤ 2 π};
logo:
W
x2 + y2 dxdydz =
2π
0
10
41−r2
r2 dz
dr
dθ =
12 π
5 .
[4] Se W é limitado por z =
8 − x2 − y2 e z =
x2 + y2, calcule:
W
zdxdydz.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 372/407
372 CAPÍTULO 12. MUDANÇA DE COORDENADAS
Figura 12.6: O sólido do exemplo [4].
W é determinado por:
W =
{(x,y,z ) / (x, y)
∈D, x2 + y2
≤z
≤ 8 −x2
−y2
}.
Onde D, no plano xy, é limitada por x2 + y2 ≤ 4. Usando coordenadascilíndricas obtemos a nova região W ∗ determinada por:
W ∗ = {(r,θ,z ) / 0 ≤ r ≤ 2, 0 ≤ θ ≤ 2 π, r ≤ z ≤√
8 − r2};
logo:
W
zdxdydz =
20
2π
0
√ 8−r2
r
r z d z
dθ
dr = 8 π.
[5] Determine o volume do sólido limitado por uma esfera de raio a.
Pela simetria do sólido calculamos o volume da calota superior da esfera emultiplicamos o resultado por 2. O sólido é definido por:
W {(x,y,z ) / (x, y) ∈ D, 0 ≤ z ≤
a2 − x2 − y2},
onde D, no plano xy, é limitada por x2 + y2 = a2. Usando coordenadascilíndricas temos que o novo sólido é definido por:
W ∗ = {(r,θ,z ) / 0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π, 0 ≤ z ≤ √ a2 − r2};
logo:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 373/407
12.2. COORDENADAS CILÍNDRICAS 373
V (W ) = 2
W
dxdydz = 2
a
0
2π
0
√ a2−r2
0
r dz
dθ
dr =
4
3π a3u.v.
[6] Determine o volume do sólido limitado por:
z =
1 − x2 − y2 e z + 1 =
x2 + y2.
Figura 12.7: O sólido do exemplo [6].
W é definido por:
W = {(x,y,z ) / (x, y) ∈ D,
x2 + y2 − 1 ≤ z ≤ 1 − x2 − y2},
onde D, no plano xy é limitada por x2 + y2 = 1. Usando coordenadas cilín-dricas temos que o novo sólido é definido por:
W ∗ = {(r,θ,z ) / 0 ≤ r ≤ 1, 0 ≤ θ ≤ 2 π, r − 1 ≤ z ≤√
1 − r2};
logo:
V (W ) =
W dxdydz = 2 10
2π
0
√ 1−r2
r−1 r dz
dθ
dr = πu.v.
[7] Determine o volume do sólido limitado por z = 9−x2−y2 e z = 1+x2+y2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 374/407
374 CAPÍTULO 12. MUDANÇA DE COORDENADAS
Figura 12.8: O sólido do exemplo [7].
W é definido por:
W = {(x,y,z ) / (x, y) ∈ D, 1 + x2 + y2 ≤ z ≤ 9 − x2 − y2},
onde D, no plano xy é limitada por x2 + y2 = 4. Usando coordenadas cilín-dricas temos que o novo sólido é definido por:
W ∗ = {(r,θ,z ) / 0 ≤ r ≤ 2, 0 ≤ θ ≤ 2 π, 1 + r2 ≤ z ≤ 9 − r2};
logo:
V (W ) = W
dxdydz = 2π
0 2
0 9−r2
1+r2r dz drdθ = 16 πu.v.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 375/407
12.3. COORDENADAS ESFÉRICAS 375
12.3 Coordenadas Esféricas
Seja P = (x,y,z ) um ponto no espaço xyz . Suas coordenadas esféricas são(ρ,θ,φ) onde ρ é a distância do ponto P à origem, θ é o ângulo formado peloeixo positivo dos x e o segmento de reta que liga (0, 0, 0) a (x,y, 0) e φ é oângulo formado pelo eixo positivo dos z e o segmento de reta que liga P à
origem:
x = ρcos(θ) sen(φ)
y = ρsen(θ) sen(φ)
z = ρcos(φ),
onde ρ =
x2 + y2 + z 2 > 0, 0 ≤ θ < 2 π e 0 ≤ φ ≤ π, o que define umaregião no espaço ρθφ.
(x,y,z)
(x,y,0)
θ
φ
Figura 12.9: Coordenadas esféricas.
O jacobiano da transformação é:
∂ (x,y,z )
∂ (ρ,θ,φ) = −ρ2 sen(φ)
Exemplos 12.3.
[1] Em coordenadas esféricas uma esfera de raio a, centrada na origem é:
S = {(ρ,φ,θ) ∈ R3/ρ = a, 0 ≤ φ ≤ π, 0 ≤ θ ≤ 2 π}.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 376/407
376 CAPÍTULO 12. MUDANÇA DE COORDENADAS
[2] Os cones circulares com eixos coincidentes com o eixo dos z são caracte-rizados por:
S = {(ρ,φ,θ) ∈ R3 / ρ ∈ [0, +∞), φ = c0, 0 ≤ θ ≤ 2 π},
onde c0 ∈ R.
Casos particulares:
Se c0 = 0 e φ = 0, S representa o semi-eixo positivo dos z .
Se c0 = π e φ = π, S representa o semi-eixo negativo dos z .
Se c0 = π
2 e φ =
π
2, S representa o plano xy.
Se 0 < c0 < π
2 e φ = c0, o cone "abre"para cima.
Se π
2 < c0 < π e φ = c0, o cone "abre"para baixo.
[3] O sólido limitado por x2 + y2 + z 2
≥1 e x2 + y2 + z 2
≤4 em coordenadas
esféricas é dado por:
W = {(ρ,φ,θ) ∈ R3 / ρ ∈ [1, 2], 0 ≤ φ ≤ π, 0 ≤ θ ≤ 2 π}.
2
1
0
1
2
2 1 0 1 2
2
1
0
1
2
Figura 12.10: Sólido do exemplo [3].
Do teorema anterior:
Corolário 12.3. Seja f (ρ,θ,φ) = f (ρcos(θ)sen(φ), ρsen(θ)sen(φ), ρcos(φ)), en-tão:
W
f (x,y,z ) dxdydz =
W ∗
ρ2sen(φ) f (ρ,θ,φ) dρdθdφ

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 377/407
12.3. COORDENADAS ESFÉRICAS 377
Esta igualdade ainda é válida se
W ∗ = {(ρ,θ,φ) / ρ ∈ [0, +∞), 0 ≤ θ ≤ 2 π, 0 ≤ φ ≤ π}.
Em particular, se f (x,y,z ) = 1 para todo (x,y,z, ) ∈ W , então:
V (W ) =
W ∗ρ2sen(φ) dρdθdφ
Exemplos 12.4.
[1] Calcule o volume do sólido limitado por uma esfera de raio a centradana origem.
O sólido é definido por x2 + y2 + z 2 ≤ a2. Utilizando coordenadas esféricas:
W ∗ = {(ρ,φ,θ) / 0 ≤ ρ ≤ a, 0 ≤ φ ≤ π, 0 ≤ θ ≤ 2 π} = [0, a] × [0, π] × [0, 2π]
W
dxdydz =
a
0
π
0
2π
0
ρ2sen(φ) dθ
dφ
dρ
= 2π
a
0
π
0
ρ2sen(φ) dφ
dρ
= 2
3πa3
π
0
sen(φ) dπ
= 4
3πa3u.v.
[2] Se W é o sólido limitado por x2 + y2 + z 2 = 1, calcule: W
e√
(x2+y2+z2)3dxdydz.
Usando coordenadas esféricas temos:
W ∗ = {(ρ,φ,θ) / 0 ≤ ρ ≤ 1, 0 ≤ θ ≤ 2 π, 0 ≤ φ ≤ π}.
Por outro lado e√
(x2+y2+z2)3 = eρ3

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 378/407
378 CAPÍTULO 12. MUDANÇA DE COORDENADAS
W
e(x2+y2+z2)32 dxdydz =
10
π
0
2π
0
ρ2 eρ3 sen(φ) dθ
dφ
dρ
= 2π
10
π
0 ρ2eρ3sen(φ)
dφ
dρ
= 4π
1
0
ρ2eρ3 dρ
= 4
3π(e − 1).
[3] Se W é o sólido limitado inferiormente por z =
x2 + y2 e superior-
mente por x2 + y2 + (z − 1
2)2 =
1
4, calcule
W
x2 + y2 + z 2dxdydz.
0.5
0.0
0.5
0.5
0.0
0.5
0.0
0.5
1.0
Figura 12.11: Sólido do exemplo [3].
A esfera x2 + y2 + (z − 1
2)2 =
1
4, em coordenadas esféricas, tem como equa-
ção:
ρ = cos(φ)
e o cone:
φ = π
4;

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 379/407
12.3. COORDENADAS ESFÉRICAS 379
então:
W ∗ = {(ρ,φ,θ) / 0 ≤ ρ ≤ cos(φ), 0 ≤ φ ≤ π
4, 0 ≤ θ ≤ 2 π}
Logo:
W
x2 + y2 + z 2dxdydz = π40
cos(φ)
0
2π
0ρ3 sen(φ) dθ
dρ
dφ
= 2π
π4
0
cos(φ)
0
ρ3 sen(φ) dρ
dφ
= π
2
π4
0
cos4(φ) sen(φ) dφ
= π
10(1 −
√ 2
8 ).
[4] Calcule W
e(x2+y2+z2)32 dxdydz onde W é o sólido limitado pela esfera
centrada na origem de raio 4 e os cones z =
3(x2 + y2) e z =
x2 + y2
3 .
2
0
2
2
0
2
0
1
2
Figura 12.12: Sólido do exemplo [4].
Usando coordenadas esféricas a equação da esfera x2 + y2 + z 2 = 16 é ρ = 4
e as dos cones z =
3(x2 + y2) e z =
x2 + y2
3 são, φ = π
6 e φ = π
3,
respectivamente.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 380/407
380 CAPÍTULO 12. MUDANÇA DE COORDENADAS
A região no espaço ρθφ é definida por:
W ∗ = {(ρ,φ,θ) / 0 ≤ ρ ≤ 4, 0 ≤ θ ≤ 2π, π
6 ≤ φ ≤ π
3}
Logo:
W
e(x2+y2+z2) 32 dxdydz =
2π
0
π3
π6
4
0
ρ2 eρ3 sen(φ) dρ
dφ
dθ
= π
3 (√
3 − 1)(e64 − 1).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 381/407
12.4. EXERCÍCIOS 381
12.4 Exercícios
1. Faça a mudança de variável necessária para calcular as seguintes inte-grais:
(a) 2−2 √ 4−x2
−√ 4−x2
4x2+y2
xdzdydx.
(b) 20
√ 4−x2
0
√ 16−x2−y2
0
x2 + y2 dzdydx.
(c) 1−1
√ 1−x2
−√ 1−x2
1+√ 1−x2−y2
1
xdz dy dx.
(d) 10
√ 1−x2
0
√ 1−x2−y2
0
x2 + y2 + z 2 dzdydx.
2. Calcule:
W
xdxdydz , onde W é o sólido limitado pelos planos x =
0, y = 0, z = 2 e pelo parabolóide z = x2 + y2.
3. Calcule:
W
xdxdydz , onde W é o sólido limitado pelo parabolóide
x = 4 z 2 + 4 y2 e pelo plano x = 4.
4. Calcule: W
6 xydxdydz , onde W está acima da região plana limi-
tada pelas curvas y = √ x, y = 0, x = 1 e abaixo do plano z = 1 + x + y.
5. Calcule:
W
xydxdydz , onde W é o tetraedro de vértices (0, 0, 0),
(1, 0, 0), (0, 2, 0) e (0, 0, 3).
6. Determine o volume:
(a) do sólido limitado pelo cilindro x = y2 e pelos planos z = 0 e
x + z = 1.(b) do sólido limitado pelo cilindro y = cos(x) e pelos planos z = y,x = 0, x = π
2 e z = 0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 382/407
382 CAPÍTULO 12. MUDANÇA DE COORDENADAS
7. O valor médio de uma função w = f (x,y,z ) sobre a região W é defi-nido por:
V M = 1
vol(W )
W
f (x,y,z ) dxdydz.
Determine o valor médio da função f (x,y,z ) = x y z sobre o cubo comlados de comprimento L que está no primeiro octante com um vérticena origem e arestas paralelas aos eixos coordenados.
Calcule, usando coordenadas cilíndricas
8.
W
x2 + y2 dxdydz , onde W é a região contida dentro do cilindro
x2 + y2 = 16 e entre os planos z = −5 e z = 4.
9.
W
x2 + y2
dxdydz , onde W é o cone
x2 + y2 ≤ z ≤ 1.
10.
W
1 +
x2 + y2
dxdydz , onde:
W = {(x,y,z ) ∈ R3 /
x2 + y2 ≤ z ≤ 1}.
Calcule, usando coordenadas esféricas
11.
W
x2 + y2 + z 2 dxdydz , onde W é o sólido limitado por abaixo
pelo cone ρ = π
6 e acima pela esfera ρ = 2.
12.
W
x2 + y2 + z 2
dxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ 1}.
13. W
dxdydz x2 + y2 + z 23
, onde W é o sólido limitado pelas esferas:
x2 + y2 + z 2 = a2 e x2 + y2 + z 2 = b2, (a < b).

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 383/407
12.4. EXERCÍCIOS 383
14.
W
dxdydz
z 2 , onde W é o sólido limitado pelas superfícies
z =
x2 + y2, z =
1 − x2 − y2 e z =
4 − x2 − y2.
15. W x2 + y2 + z 2 dxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ 2 z , 1 ≤ z }.
16. Calcule o volume do sólido limitado:
(a) Por z = 4 − x2 − y2 e pelo plano xy.
(b) Por z = x2 + y2 e x2 + y2 + z 2 = 2.
(c) Por z = x2 + 9 y2 e z = 18
−x2
−9 y2.
(d) Por z = 2 x2 + 2 y2 e z = 48 − x2 − y2.
17. Calcule
W
x2
a2 +
y2
b2 +
y2
c2
dxdydz , onde a, b, c > 0 e o sólido de-
finido por:
W = {(x,y,z ) ∈ R3 / x2
a2 +
y2
b2 +
y2
c2 ≤ 1}.
18. Calcule
W
x y z d x d y d z , onde W é formado pelo primeiro octante
do elipsóide do exercício anterior, (x, y, z ≥ 0).
19. Utilizando coordenadas cilíndricas, calcule:
(a)
W
(x2 + y + z 2)3 dxdydz , onde W é o sólido limitado pelo ci-
lindro x2 + z 2 = 1 e pelos planos y = 0 e y = 1.
(b)
W (x2
+ y2
) dxdydz , onde W é o sólido limitado pela superfí-cie 2 z = x2 + y2 e o plano z = 2.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 384/407
384 CAPÍTULO 12. MUDANÇA DE COORDENADAS
(c)
W
dxdydz , onde W é o sólido limitado por x2+y2+z 2 = 2 R z ,
x2 + y2 = z 2 e que contem o ponto (0, 0, R).
20. Utilizando coordenadas esféricas, calcule:
(a)
W (x2 + y2) dxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ a2, z ≥ 0}.
(b)
W
1 + (x2 + y2 + z 2)3/2 dxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ 1}.
(c)
W
x2
+ y2
+ z 2
dxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ x}.
(d)
W
adxdydz , onde:
W = {(x,y,z ) ∈ R3 / x2 + y2 + z 2 ≤ 1, x ≥ 0}.
21. Calcule o volume do sólido limitado:
(a) pelo cilindro x2 + 4 y2 = 4 e pelos planos z = 0 z = x + 2
(b) pelo parabolóide z = x2 + y2 e pelo plano z = x
(c) pelos parabolóides z = 9 x2 + y2 e z = 18 − 9 x2 − y2
(d) pelas superfícies z =
x2 + y2 e z = x2 + y2
(e) pela superfície z = 4 − 4 x2 − y2 e o plano xy
(f) pelos cilindros x2
+ z 2
= 1 e y2
+ z 2
= 1.
(g) pelos planos z = 0, y = 0, z = x e pelo cilindro x2 + y2 = 9

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 385/407
12.4. EXERCÍCIOS 385
22. Se W é um sólido não homogêneo com densidade em cada ponto dadapor w = f (x,y,z ), a massa de W é definida por:
M W =
W
f (x,y,z ) dxdydz.
As coordenadas do centro de massa do sólido W são definidas por:
x =
W
x f (x,y,z ) dxdydz
M W ,
y =
W
y f (x,y,z ) dxdydz
M W
e:
z =
W
z f (x,y,z ) dxdydz
M W
(a) Calcule a massa de W = {(x,y,z ) ∈ R3 / x2 + y2 ≤ 9, 0 ≤ z ≤9 − x2 − y2} se a densidade é f (x,y,z ) = z
(b) Calcule o centro de massa do sólido limitado por z 2 = x y, x = 5,y = 5 e z = 0 se a densidade é f (x,y,z ) = 1
(c) Calcule o centro de massa do sólido limitado pela esfera x2 + y2 +z 2 = a2 e situado acima do plano z = 0, sabendo que a densidadeem cada ponto é proporcional á distância do ponto ao centro daesfera.
(d) Se a densidade num ponto de uma estrla esférica gaseosa é dadapor f = C e−(ρ/R)3 , onde C > 0, R é o raio da estrela e ρ é adistância do ponto ao centro da estrela. Calcule a massa da estrela
23. Se W é um sólido não homogêneo com densidade em cada ponto dadapor w = f (x,y,z ), então os momentos de inércia em torno dos eixoscoordenados são definido por:
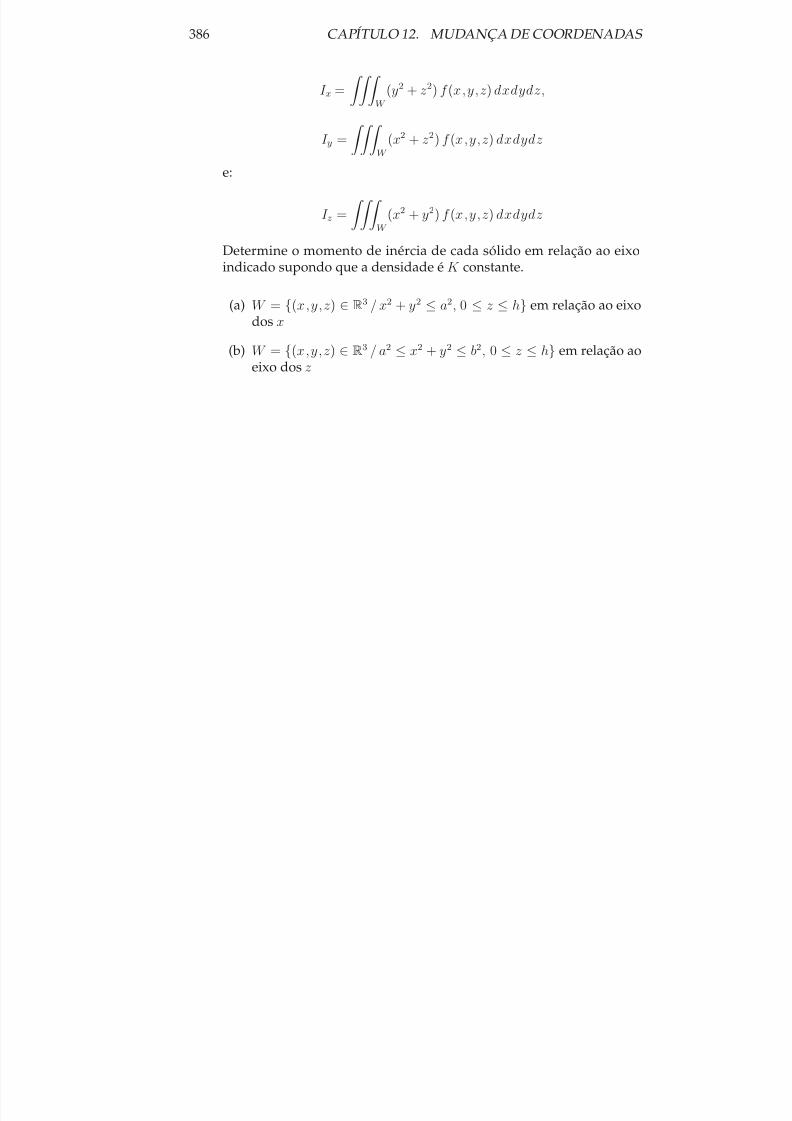
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 386/407
386 CAPÍTULO 12. MUDANÇA DE COORDENADAS
I x =
W
(y2 + z 2) f (x,y,z ) dxdydz,
I y =
W
(x2 + z 2) f (x,y,z ) dxdydz
e:
I z =
W
(x2 + y2) f (x,y,z ) dxdydz
Determine o momento de inércia de cada sólido em relação ao eixoindicado supondo que a densidade é K constante.
(a) W = {(x,y,z ) ∈ R3 / x2 + y2 ≤ a2, 0 ≤ z ≤ h} em relação ao eixodos x
(b) W = {(x,y,z ) ∈ R3 / a2 ≤ x2 + y2 ≤ b2, 0 ≤ z ≤ h} em relação aoeixo dos z

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 387/407
Capítulo 13
APÊNDICE
13.1 Limite e Continuidade
Teorema 13.1. Seja f : A ⊂ Rn −→ R uma função. Se o limite de f quandox aproxima-se de x0 existe, então ele é único.
Suponha que limx→x0
f (x) = L e limx→x0
f (x) = M . Então, para todo ε > 0 existe
δ > 0 tal que 0 < x− x0 < δ implica em |f (x) − L| < ε
2 e |f (x) − M | <
ε
2.
Como x0 ∈ A ∪ ∂A, podemos escolher x ∈ A tal que 0 < x− x0 < δ , o queacarretará:
|L − M | ≤ |L − f (x)| + |f (x) − M | < ε
2 +
ε
2 = ε.
Como ε é arbitrário, L = M .
13.2 DiferenciabilidadeTeorema 13.2. Seja f : A ⊂ Rn −→ R uma função definida no conjuntoaberto A tal que existem todas as derivadas parciais em cada ponto de A ecada uma delas é contínua no ponto x0 ∈ A. Então f é diferenciável em x0.
Faremos a prova do teorema para n = 2. O caso geral é análogo. Sejamx0 = (x0, y0) e h = (h, k) tal que x0 + h ∈ A.Denotemos por M = f (x0 + h, y0 + k) − f (x0, y0); então:
M = (f (x0 + h, y0 + k)−
f (x0, y0 + k)) + (f (x0, y0 + k)−
f (x0, y0)).
Definamos a função g(t) = f (x0 + t h , y0+ k), t ∈ [0, 1]; pelo teorema do valormédio para funções de uma variável, existe θ1 ∈ (0, 1) tal que
387

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 388/407
388 CAPÍTULO 13. APÊNDICE
g(1) − g(0) = g ′(θ1),
ou equivalentemente:
f (x0 + h, y0 + k)
−f (x0, y0 + k) = h
∂f
∂x
(x0 + θ1 h, y0 + k).
Definamos a função h(t) = f (x0, y0 + t k), t ∈ [0, 1]; pelo teorema do valormédio para funções de uma variável, existe θ2 ∈ (0, 1) tal que
h(1) − h(0) = h′(θ2)
ou:
f (x0, y0 + k) − f (x0, y0) = k ∂f
∂y(x0, y0 + θ2 k).
Então M = h
∂f
∂x (x0 + θ1 h, y0 + k) + k
∂f
∂y (x0, y0 + θ2 k), ou:
f (x0 + h, y0 + k) − f (x0, y0) = h ∂f
∂x(x0 + θ1 h, y0 + k) + k
∂f
∂y(x0, y0 + θ2 k).
Denote por:
K = f (x0 + h, y0 + k) − f (x0, y0) − h ∂f
∂x(x0, y0) − k
∂f
∂y(x0, y0),
L = (∂f
∂x(x0 + θ1 h, y0 + k) − ∂f
∂x(x0, y0))
S = (∂f
∂y(x0, y0 + θ2 k) − ∂f
∂y(x0, y0)). Então
|K |√ h2 + k2
≤ |h|√ h2 + k2
|L| + |k|√
h2 + k2|S |.
0 ≤ |h|√ h2 + k2
≤ 1 e 0 ≤ |k|√ h2 + k2
≤ 1.
Pela continuidade das derivadas parciais no ponto x0 , segue que f é dife-
renciável no ponto x0.
Proposição 13.1. Se f é diferenciável no ponto x0, então f é contínua em x0.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 389/407
13.2. DIFERENCIABILIDADE 389
(n = 2). O caso geral é análogo. Devemos provar, que para todo ε > 0 existeδ > 0 tal que: |f (x, y)−f (x0, y0)| < ε se 0 < x−x0 < δ . Se f é diferenciávelno ponto x0, então, para ε1 = 1 existe δ 1 > 0 tal que:
|f (x, y) − f (x0, y0) − ∂ f
∂x(x0)(x − x0) − ∂ f
∂y(x0)(y − y0)| < x− x0,
se 0 < x− x0 < δ 1. Denotaremos por:
k(x, y) = (∂f
∂x(x0, y0) (x − x0) +
∂f
∂y(x0, y0) (y − y0)); então:
|f (x, y) − f (x0, y0)| = |f (x, y) − f (x0, y0) − k(x, y) + k(x, y)|≤ |f (x, y) − f (x0, y0) − k(x, y)| + |k(x, y)|< x− x0 + |k(x, y)|.
Por outro lado,∂f
∂x(x0)(x − x0) ≤ ∂f
∂x(x0) (x − x0)2 + (y − y0)2,
∂f
∂y(x0)(y − y0) ≤ ∂f
∂y(x0) (x − x0)2 + (y − y0)2.
Denotemos por M o maior entre |∂f
∂x(x0)| e |∂f
∂y(x0)|.
Teremos: |k(x, y)| ≤ 2 M x− x0; então:
|f (x, y) − f (x0, y0)| < (2 M + 1) x− x0.
Dado ε > 0, seja δ = min{δ 1, ε
2 M + 1}; se x− x0 < δ , temos
f (x, y) − f (x0, y0) < ε.
Teorema 13.3. (Schwarz)Se f : A ⊂ Rn −→ R é uma função de classe C 2 noponto x0, então para todo i, j = 1.....n tem-se:
∂
∂x j ∂f
∂xi (x0)
=
∂
∂xi ∂f
∂x j (x0)
,
para i = j .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 390/407
390 CAPÍTULO 13. APÊNDICE
Faremos a prova do teorema para n = 2. O caso geral é análogo. Conside-remos x0 = (x0, y0). Sejam ε > 0 tal que (x0 − ε, x0 + ε) × (y0 − ε, y0 + ε) ⊂ Ae t ∈ (−ε, ε). Definamos as funções:
φ(t) = f (x0 + t, y0 + t) − f (x0 + t, y0) − f (x0, y0 + t) + f (x0, y0) er(x) = f (x, y0 + t) − f (x, y0);
então φ(t) = r(x0 + t) − r(x0). Aplicando o teorema do valor médio parafunções de uma variável à função: r(x) onde x ∈ [x0, x0 + t], existe θ1 ∈ (0, 1)tal que r(x0 + t) − r(x0) = t r′(x0 + t θ1) ou:
φ(t) = t (∂f
∂x(x0 + t θ1, y0 + t) − ∂f
∂x(x0 + t θ1, y0)).
As funções ∂f
∂x e
∂f
∂y são contínuas no ponto (x0, y0). Aplicando o teorema
do valor médio para funções de uma variável a:
m(y) = ∂f
∂x (x0 + t θ1, y), y ∈ [y0, y0 + t],
existe θ2 ∈ (0, 1) tal que:
m(y0 + t) − m(y0) = t ∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2)
ou:
φ(t) = t2 ∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2).
De forma análoga para s(y) = f (x0 + t, y)
−f (x0, y), obtemos:
φ(t) = t2 ∂ 2f
∂x∂y(x0 + t θ3, y0 + t θ4), θ3, θ4 ∈ (0, 1),
e:∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2) =
∂ 2f
∂x∂y(x0 + t θ3, y0 + t θ4);
fazendo t −→ 0 e lembrando que as derivadas parciais de segunda ordemsão contínuas, provamos o teorema.
Proposição 13.2. Se f é uma função de classe C 1 então:
∂f
∂ v(x) = ∇f (x) · v.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 391/407
13.2. DIFERENCIABILIDADE 391
Seja g(t) = f (x + t v1, y + t v2, z + t v3); g é uma função derivável de umavariável; utilizando a regra da cadeia, derivamos g:
g′(0) = ∂f
∂ x v1 +
∂ f
∂ y v2 +
∂f
∂ y v3 = ∇f (x,y,z ) · v;
por outro lado ∂f
∂ v (x,y,z ) = g ′(0).Definição 13.1.
1. Uma curva diferenciável parametrizada γ pasando por x0 em Rn édeterminada por n funções diferenciáveis:
xi : I ⊂ R −→ R,
i = 1, 2,...,n tal que γ (t) = (x1(t), x2(t), ........, xn(t)) e γ (t0) = x0, ondeI ⊂ R.
2. A derivada de γ é γ ′(t) = (x′
1(t), x′
2(t), ........, x′
n(t)).
3. Uma curva parametrizada γ em A ⊂ Rn é tal que γ (I ) ⊂ A.
Proposição 13.3. Seja (x0, y0, z 0) ∈ S c. Suponha que ∇f (x0, y0, z 0) = 0, então∇f (x0, y0, z 0) é normal ao plano tangente a S c no ponto (x0, y0, z 0).
Seja γ uma curva sobre a superfície S c tal que γ (t0) = (x0, y0, z 0), para algumt0 ∈ R. Então f (γ (t)) = c, pois γ pertence à S c.
d
dt(f (γ (t))
t=t0
= 0 e ∇f (γ (t)) · γ ′(t) = 0;
logo: ∇
f (x0, y0, z 0)·
γ ′(t0) = 0.Isto é válido para qualquer curva em S c passando por (x0, y0, z 0).
Teorema 13.4. Seja f : A ⊂ Rn −→ R uma função diferenciável definida noaberto A e x0 um ponto extremo local de f . Então
∇f (x0) = 0.
Suponha que x0 é ponto de máximo de f . Para todo v ∈ Rn a função realh(t) = f (x0+t v) possui um ponto de máximo em t = 0; pela regra da cadeia:
0 = d
dth(t)|t=0 = ∇f (x0) · v
e a igualdade vale para todo v; então ∇f (x0) = 0. A prova é análoga se x0 éponto de mínimo local de f .

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 392/407
392 CAPÍTULO 13. APÊNDICE
Teorema 13.5. Seja a família de funções:
f (x, y) = A x2 + 2 B x y + C y2,
tal que A, B, C ∈ R e não são todas simultaneamente nulas. Denotemospor ∆ = A C − B2.
1. Se ∆ > 0 e A > 0, então (0, 0) é ponto de mínimo de f .
2. Se ∆ > 0 e A < 0, então (0, 0) é ponto de máximo de f .
3. Se ∆ < 0, então (0, 0) é ponto de sela de f .
Suponha que ∆ > 0; logo A = 0.
f (x, y) = A
x + B y
A
2+
1
A∆ y2;
ambas as parcelas tem o mesmo sinal que A e f (x, y) = 0 se e somente se:x +
B y
A = 0
y = 0;
então f (x, y) = 0 se e somente se x = y = 0.
1. Se A > 0, temos 0 = f (0, 0) < f (x, y) e (0, 0) é ponto de mínimo de f .
2. Se A < 0, temos f (x, y) < f (0, 0) = 0 e (0, 0) é ponto de máximo de f .
3. Suponha que ∆ < 0 e A= 0; denotando por E =
√ B2 − AC
A , temos:
f (x, y) = A
x + B y
A
− E y
x + B y
A
+ E y
;
f (x, y) = 0 se, e somente se: y = A x
A E − B ou y = − A x
A E + B;
logo, f (x, y) > 0 se y > A x
A E − B ou y > − A x
A E + B e
f (x, y) < 0 se y < A x
A E − B ou y < − A x
A E + B.
Portanto, numa vizinhança de (0, 0) f toma valores negativos e positivos.
Se A = 0, então f (x, y) = 2 B x y + C y2; logo B = 0, caso contrário ∆ = 0;então:f (x, y) = y (2 B x + C y);

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 393/407
13.2. DIFERENCIABILIDADE 393
portanto: f (x, y) > 0 se, e somente sey > 0 e B x + C y > 0 ouy < 0 e B x + C y < 0.
f (x, y) < 0 se, e somente sey > 0 e B x + C y < 0ouy < 0 e B x + C y > 0.
Teorema 13.6. Sejam z = f (x, y) uma função de classe C 2 definida numconjunto aberto U ⊂ R2 e (x0, y0) ∈ U um ponto crítico de f . Denotemospor:
A(x, y) = ∂ 2f
∂x2(x, y), B(x, y) =
∂ 2f
∂x∂y(x, y), C (x, y) =
∂ 2f
∂y2(x, y) e
∆(x, y) = A(x, y) C (x, y)
−B2(x, y).
Então:
1. Se A(x0, y0) > 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de mínimo localde f em U .
2. Se A(x0, y0) < 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de máximo localde f em U .
3. Se ∆(x0, y0) < 0, então (x0, y0) é ponto de sela de f em U .
4. Se ∆(x0, y0) = 0, nada se pode concluir.
Seja θ ∈ [0, 2 π]. Consideramos a seguinte função de uma variável:
h(r) = f (x0 + r cos(θ), y0 + r sen(θ));
h(r) descreve o comportamento de f ao longo da reta que passa pelo ponto(x0, y0) e na direção (cos(θ),sen(θ)). Denotemos por a = x0 + r cos(θ) eb = y0 + r sen(θ); usando a regra da cadeia, derivemos a função h:
h′(r) =
∂f
∂x (a,b) cos(θ) +
∂ f
∂y (a,b) sen(θ);
então, r = 0 é ponto crítico de h. Derivando novamente:

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 394/407
394 CAPÍTULO 13. APÊNDICE
h′′(r) = ∂ 2f
∂x2(a,b) cos2(θ) + 2
∂ 2f
∂x∂y(a,b) cos(θ) sen(θ) +
∂ 2f
∂y2(a,b) sen2(θ).
Fazendo A = ∂ 2f
∂x2(x0, y0), B =
∂ 2f
∂x∂y(x0, y0), C =
∂ 2f
∂y2(x0, y0), x = cos(θ) e
y = sen(θ), obtemos:
h′′(0) = A x2 + 2 B x y + C y2
Como A > 0 e ∆ > 0, pelo teorema anterior h′′(0) > 0; então h possui umponto de mínimo em r = 0. O argumento vale para todo θ ∈ [0, 2 π]. Logo f possui um ponto de mínimo local em (x0, y0). Os demais casos ficam comoexercícios.
Teorema 13.7. Sejam f, g : A ⊂ Rn −→ R funções de classe C 1. Denotemospor S um conjunto de nível de g. Se f tem um ponto de máximo ou de
mínimo x0 ∈ S e ∇g(x0) = 0, então existe λ ∈ R tal que ∇f (x0) = λ ∇g(x0).
Faremos a prova para n = 2, o caso n = 3 é análogo. Suponha que a curva denível de g se escreva na forma paramétrica γ (t) = (x(t), y(t)) e que γ ′(t) =
(x′(t), y′(t)) = 0; consideremos a seguinte função de uma variável β (t) =f (γ (t)) = f (x(t), y(t)) tal que t ∈ (a, b). Como f possui um ponto extremoem x0, então, existe t0 ∈ (a, b) tal que β possui um ponto extremo em t0;logo, β ′(t0) = 0 e pela regra da cadeia:
β ′(t) = ∂f
∂x(x(t), y(t))
dx
dt +
∂f
∂y(x(t), y(t))
dy
dt = ∇f (x(t), y(t)) γ ′(t).
Denotando x0 = (x(t0), y(t0)) e calculando β ′(t0) = 0; temos, ∇f (x0)·γ ′(t0) =0; portanto ∇f (x0) e γ ′(t0) = 0 são ortogonais. Como ∇f é ortogonal àscurvas de nível de f , no ponto x0 as curvas de nível de g e de f devem sertangentes e ∇f (x0) = λ ∇g(x0).
13.3 Integração
Teorema 13.8. (Fubini) Seja f : R −→ R2 contínua sobre R. Então:
R
f (x, y) dxdy = d
c
b
af (x, y) dx
dy = b
a
d
cf (x, y) dy
dx,
onde R = [a, b] × [c, d].

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 395/407
13.3. INTEGRAÇÃO 395
Fixemos x0 ∈ [a, b] e consideremos a função f x0 : [c, d] −→ R definida porf x0(y) = f (x0, y), para todo y ∈ [c, d]. Como f x0 é contínua em [c, d], é inte-
grável em [c, d]; definamos A(x0) =
d
c
f (x0, y) dy. Provaremos que a fun-
ção: A : [a, b] −→ R é integrável em [a, b] e:
b
a A(x) dx =
Rf (x, y) dxdy.
Como antes, seja c = y0 < y1 < ..... < yn = d uma partição de ordem n de[c, d] tal que ∆y = d−c
n ; logo:
A(x) =
n−1k=0
yk+1
yk
f (x, y) dy.
Pelo teorema do valor médio para integrais, temos:
yk+1
yk
f (x, y) dy = f (x, y∗k(x)) (yk+1 − yk),
onde y∗k(x) ∈ [yk, yk+1] (y∗k(x) possívelmente depende de x); então:
A(x) =n−1k=0
f (x, y∗k(x)) (yk+1 − yk).
Pela definição de integral para funções de uma variável: b
a
d
c
f (x, y) dy
dx =
b
a
A(x) dx = limn→+∞
n−1k=0
A( p j) (x j+1 − x j ),
onde a = x0 < x1 < ..... < xn = b é uma partição de ordem n de [a, b] tal que∆x =
b − a
n e p j ∈ [x j, x j+1].
Considere c jk = ( p j , yk( p j)) ∈ R jk , logo A( p j) =n−1k=0
f (c jk ) (yk+1 − yk) e
b
a
d
c
f (x, y) dy
dx =
b
a
A(x) dx = limn→+∞
n−1 j=0
A( p j ) (x j+1 − x j)
= limn→+∞
n−1
j=0
n−1
k=0
f (c jk ), (yk+1 − yk) (x j+1 − x j )
=
R
f (x, y) dxdy.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 396/407
396 CAPÍTULO 13. APÊNDICE
De forma análoga prova-se que d
c
b
a
f (x, y) dx
dy =
R
f (x, y) dxdy.
Proposição 13.4. Se f : D −→ R é contínua e limitada sobre D, então:
1. Se D é uma região de tipo I:
D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)
f (x, y) dy
dx.
2. Se D é uma região de tipo II:
D
f (x, y) dxdy =
d
c
ψ2(y)
ψ1(y)
f (x, y) dx
dy.
Se R = [a, b]×[c, d] e D ⊂ R, podemos utilizar todos os resultados anteriores.Em particular para integrais iteradas. De fato,
D
f (x, y) dxdy =
R
f ∗(x, y) dxdy =
b
a
d
c
f ∗(x, y) dy
dx
=
d
c
b
a
f ∗(x, y) dx
dy.
Suponha que D é uma região de tipo I definida por: φi : [a, b] −→ R, i = 1, 2.
Consideremos b
a
d
c
f ∗(x, y) dy
dx.
φ
1
2
φc
dR
D
bxa
Figura 13.1:
Fixando x ∈ [a, b], f ∗ é limitada e contínua, exceto, possivelmente em doispontos, logo a integral d
c
f ∗(x, y) dy existe.
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 397/407
13.3. INTEGRAÇÃO 397
Mas f ∗(x, y) = 0 se c < y < φ1(x) e φ2(x) < y < d.
d
c
f ∗(x, y) dy =
φ2(x)
φ1(x)
f ∗(x, y) dy =
φ2(x)
φ1(x)
f (x, y) dy,
pois f = f ∗ em D. Então, se D é de tipo I:
D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)
f (x, y) dy
dx.
Se D é do tipo II, a prova é análoga.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 398/407
398 CAPÍTULO 13. APÊNDICE

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 399/407
Capítulo 14
RESPOSTAS
Respostas dos Exercícios Ímpares
14.1 Capítulo 1
[1] a) (−6, 1, 0) b) (18, 0, 7) c) (−7, −199, 10) d) (−29, −1, −7) e) (0, −6, 1)f) (5, −10, 27) g) (4, 2, −1) h) (6, 2, 2)i) (−15, 21, −12) j) (−1, 11, −11)k) (18, −16, 5) l) (3, −12, 2) m) (−2, 6, 0)n) (−8, −23, 1) o) (−1, −6, 0)
[3] a) arccos(10/√
210) b) arccos(9/√
246) c) arccos(−2√
2/3)d) arccos(3/2
√ 231) e) arccos(−34/
√ 5005) f) arccos(10/
√ 210)
g) arccos(−2√
2/7) h) arccos(−6/√
186)i) arccos(3/
√ 42) j) arccos(2/
√ 106)
[5] a) (5, 6, 7) b) (10, −7, 4) c) (2, 0, 2)k) (1, −2, −2) m) (−5, −9, 12) p) (−7/5, 9/10, −1/3)
[7] a) 9√ 3
2 b)
√ 10162
c)√
141
d)√ 4012
.[9]a)
√ 37 b)
√ 373 c) 5
√ 1590 d) 9
√ 11
e)√
37 f)√
854 g)
(21)
h) 2√
11 i) 9√
10 j)√
111.[11] P = (11, 10, −3)[13]
a) 4x − 14y − 11z + 34 = 0 b) 2x + 7y − 6z − 21 = 0, c) 4x − 2y + 4z − 36 = 0g) 76x + 33y − 20z − 89 = 0.
399
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 400/407
400 CAPÍTULO 14. RESPOSTAS
Quádricas
[1] a) elipsóide; b) parabolóide circular; c) hiperbolóide de uma folha; d)cone elítico;e) parabolóide elítico; f) parabolóide hiperbólico; g) hiperbolóide de duasfolhas; h) esfera.
[3] a) elipse ; b) e b) círculo. [5] (9, −2, 5).
14.2 Capítulo 2
[1] a) V = 4πr2h3
m3
[3] a) 0 b) π2 c) x6 d) y2z 4 e) x5y3z 7
f) y2z 2(h + 2x) g) x2z 2(h + 2y), h) x2y2(h + 2z ),i) (yh+yz +xy+xh+h2+xz +zh)(yzh+2yzx+yh2+yhx+h3+h2x+h2z +zhx).[7]
a) -2 - 1 0 1 2
-2
-1
0
1
2
b) -2 - 1 0 1 2
-2
-1
0
1
2
c) 1.0 0.5 0.0 0.5 1.0
1.0
0.5
0.0
0.5
1.0
d) 2 1 0 1 2
2
1
0
1
2
e) 2 1 0 1 2
2
1
0
1
2
f ) 2 1 0 1 2
2
1
0
1
2
g) 2 1 0 1 2
2
1
0
1
2
h) 1.5 2.0 2.5 3.0
2
1
0
1
2
i) 2 1 0 1 2
2
1
0
1
2
j) 2 1 0 1 2
2
1
0
1
2
[9]
a) b) c) d)
e) f ) g) h)

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 401/407
14.3. CAPÍTULO 4 401
i) j) k) l)
m) n)
14.3 Capítulo 4
[1] a) c) 0 b) d) f) 1 e) 5 g) ln(2) h) 5/3 [7] a) b) d) contínua c) f) g) descontínua[9] a = 4
14.4 Capítulo 5
[1] a) (2x − y)y e x(x − 2y) b) 3x2y3 e 3x3y2
c) 2x y3(1 − 6x2y) e 3x2y2(1 − 4x2y)d) (2x)/(1 + (x2 + y)2) e 1/(1 + (x2 + y)2)e) 2xsec(x2 + y) tg(x2 + y) e sec(x2 + y) tg(x2 + y)f) (y cosh(
√ xy))/(2
√ xy) e (xcosh(
√ xy))/(2
√ xy)
n) exyz2 yz 2, exyz2 xz 2 e) 2 exyz2 xyz o) (−x2 + y2 + z 2 − 2x(y + z ))/(x2 + y2 + z 2)2,
(x2
+ y2
+ z 2
− 2y(x + y + z ))/(x2
+ y2
+ z 2
)2
e(x2 + y2 + z 2 − 2z (x + y + z ))/(x2 + y2 + z 2)2
r) (yz )/
1 + x2y2z 2, (xz )/
1 + x2y2z 2 e (xy)/
1 + x2y2z 2
x) cos(ln(xyz 2))/x, cos(ln(xyz 2))/y e 2 cos(ln(xyz 2))/z [9] a) 1.001 b) 0.989 c) 11.031 d) 177.238 e) 26.909[13] a) −2 cos(t) sin(t) b) et(ln(t) t − 1)/(t(ln(t)2 + e2t))c) (1 + tg(te−t)2)(e−t − t e−t)d) (3 t2 + 2 (3t + 1)t) e(3t+1)t2) g) 9t8 i) 4e2t j) −2e2t/(2 + e−2t)2 l) 3/2t[15] 42 cm3/h [16] 2 cm/seg [17] 0.4 cm3/seg
14.5 Capítulo 6[1] a) (4x, 5) b) −2 (x/((x2 + y2)2), y/((x2 + y2)2))
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 402/407
402 CAPÍTULO 14. RESPOSTAS
d) (−sen(xy) y, −sen(xy) x + cos(yz ) z,cos(yz ) y)e) 2 (x/(x2 + y2 + z 2), y/(x2 + y2 + z 2), z/(x2 + y2 + z 2)g) (y ez + yz ex, x ez + z ex, x y ez + y ex) h) (y/z, x/z, −xy/(z 2))i) (1/x, 1/y, 1/z ) j) −2/((x2 + y2 + z 2 + 1)2) (x/((x2 + y2 + z 2 + 1)2), y , z )k) 1/((x + y2 + z 3) (1/(ln(2) + ln(3))), 2y/(ln(2) + ln(3))), 3z 2/(ln(2) + ln(3))))
[3] a) 2 √ 13, (4, −6) b) 1, −1/2 (√ 2, √ 2)c) 1, (0, 1) d) e6/6√
10 + 9π2 + 6π, (−e6/2, e6 (3π + 1)/6)f)
√ 3, (1, 1, 1) h) e
√ 3, (e,e,e) i) 0, (0, 0) j)
√ 3/2, (1/2, 1/2, 1/2) g) 2
√ 19,
(2, 6, 6)
[5] (−4 e−1, 0) [9] 4 x − 2 y + 4 z − 5 = 0 [11]
x = 4
y = 16
z = 8 t
[7]√ 22
(−1, 5) [9] (a) − 28√ 2 (b) (−3, −4) (c) (3, 4) (d) (4, −3) [11] na direção do
vetor (1, 3, 2).[13] diminui [15] (
−1/3, 3/4), (7/3,
−3/4) [17] cos(α) = 3/
√ 10
[19] (−4/5, −3/5), (4/5, 3/5)
14.6 Capítulo 7
[1] a) (0, 0) b) (−1/4, −1/4) c) (1, 2), (1, −2), (−1, 2),(−1, −2) e (0, 0)d) (−2, −2), (2, 2) e) (−1/4, 16) f) (0, 0) g) (1/2, 1/2), (−1, −1)h) (1, 1), (1, −1), (−1, 1) e (−1, −1) i) (0, 0) j) (1, 2) k) (0, 0)l) (0, 0, 0) m) (0, 0, 0) n) (0, 0, 0)[3] a) b) um ponto mínimo c) um ponto de máximo, 4 pontos de sela d) 2
pontos de selag) um ponto de máximo e um ponto mínimo n) s) um ponto mínimo t) x) 2pontos de selaw) um ponto de sela[5] os pontos (0, 0, ±1) [7] (6, 2, 4) [9] P = (1, 4/3) [10] a
√ 3
3 , b
√ 3
3 , c
√ 3
3
[11] 12x + y + 2z = 6[13] c/3 mg de A e c/2 mg de B
Multiplicadores de Lagrange
[1] (a) (0, 0) máx. e (0, 4) mín. (b) (3/2,−
3/2) mín. (c) (0, 2) máx. e (0, 0) mín.
(d) (6/7, −4/7, 2/7) (e) (2, −2, 2) máx. e (−2, 2, −2) mín. (f) ±
322
(1, 2, 2/3)
[2] (0, 0, ±1), (±1, 0, 0) e (0, ±1, 0) máx. e (0, 0, 0) mín.

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 403/407
14.7. CAPÍTULO 8 403
[3]
b − 1/4 [4] Valor máx 1/2 e valor mín 0
[5]√
2 e 1 [7] Valor máx 1 +√
2 e valor mín 1 − √ 2 [9] π
8 + kπ2
e π8 − kπ
2
[11] triângulo equilátero [13] 200 u.t. e -200 u.t. (u.t.=unidades de tempera-tura)[15] 1
2 (1 − √
7, 0, 1 +√
7) e 12 (1 +
√ 7, 0, 1 − √
7) [17] triângulo equilátero[19] triângulo retângulo isósceles ( cada cateto =
√ 2S ). [20] 10k
14.7 Capítulo 8
[1] (a)1/12 (b) 0 (c) 44 (d) π/3 (e) 20 e3/9 + 4 e−1 + 91 e−6/36+ 5 e2/4 (f) −20/3(g) 420 (h) 0 (i) 4
[3] (a) − ln(cos(1))2
(b) 5/6 (c) 2/3 (d) 1−cos(1)2
(f) sen(81)4
(e) e9−16
[4] (a) 27/20 (b) a2b2/8 (c) 4/5 (d) π − 2 (e) 1/6 (f) (e−1)22
(g) 1−cos(1)2
(h) 500/3(i) −24/5(j) 12/5 (k) 189/10 (l) 1/10
14.8 Capítulo 9
[1] (a) 6/35 (b) 44/35 (c) 16/3 (d) 13/6 (e) 1/3[3] (b) 32/3 (c) 9/2 (d) 113/6 (e) 1/2 (f) 32/3 (g) 125/6 (h) 72[5] (a) 16/3 (b) 64/9 (c) 32/45 (d) 1/90
Mudanças de Variáveis
[1] 1 [2] 20/3 [3] zero [4] (c) 3π [5] 4/3 [6] (a) 1/18 (3√
3 − π) (b) 5π (c) 8 − π
[7] π (1 − cos(1))
14.9 Capítulo 10
[1] a) 28 b) 8/27 c) 1/10 d) π (cos(4) − 1)(3π − 4)/12 e) 1 f) 19/10[3] 6 [4] 81π [5] (8ln(2) − 5)/16 [6] 57πa6/5 [7] 8a2/9[8] 32/3 [9] 1688/15
14.10 Capítulo 11
[1] (a) 0 (b) 8π2/3 − 2√
3π (c) pi2/8 (d) π/8 [2] (a) 8√
2/15 (b) 16π/3 (c) 65/28(d) 1/10

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 404/407
404 CAPÍTULO 14. RESPOSTAS
[3] (a) 8/15 u. v. (b) π/8 u.v. [4] L3/8 [5] (a) 384π (b) π/10 (c) π/2[6] (a) 4(2 − √
3)π (b) 4π/5 (c) 4πln(b/a) (d) 2(√
2 − 1)π (e) (53 − 16√
2)π/30[7] (a) 8π u. v. (b) (4
√ 2/3 − 7/6)π u. v. (c) 27π u. v. (d) 256π u. v.
[8] 4πabc/3 [9] (abc)2/48 [10] (a) 3π/2 (b) 16π/3 (c) πR3
[11] (a) 4πa5/15 (b) 8π(2√
2 − 1)/9 (c) π/10 (d) 2πa/3[12] (a) 4π (b) π/16 (c) 27π (d) π/6 (e) 4π (f) 16/3 (g) 9
[13] (a) 243π/2 (b) x = y = 3 e z = 45/32 (c) x = y = 0 e z = 2a/5 (d)4CπR3(1 − e−1)/3[14] (a) kπa4h/2 (b) kπ(b4 − a4)h/2

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 405/407
Bibliografia
[TA] T. Apostol: Mathematical Analysis: A Modern Approach to Advan-ced Calculus, Reading, Mass, Addison-Wesley Pub. Co.
[EL] E. Lima: Curso de Análise, Vol. II , Ed. Universitaria.
[MW] J. Marsden- A. Weinstein: Calculus, Vol. II e III , Springer-Verlag.
[VC] M. Vilches - M. Corrêa: Cálculo: Volume I , edição online
www.ime.uerj.br/∼calculo.
405

8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 406/407
Índice
Área, 289Ângulos Diretores, 17
Aproximação Linear, 137Exemplos, 138
Centro de Massa, 341Conjunto Limitado, 237Conjuntos Abertos, 97Conjuntos de nível, 76Conjuntos Fechados, 100Conteúdo Nulo, 352Conteúdo nulo, 282Continuidade, 109
Definição, 109
Derivada Direcional, 165Como Taxa de Variação, 169Definação, 165
Derivadas Parciais, 117
Como Taxa de Variação, 126definição, 117Generalizações, 123Interpretação Geométrica, 123
Derivadas Parciais de Ordem Supe-rior, 143
Determinação dos Extremos Condi-cionados, 242
Diferenciabilidade, 130Definição, 130
Domínio e Imagem, 71
Equaçãode Laplace, 146
de Onda, 147de ondas, 157
Fronteira de um Conjunto, 98Função
integrável, 272, 350Função Implícita
Teorema, 186Funções, 65
Definição, 65variável dependente, 65variável independente, 65
Funções de Classe C 1, 134Funções de Classe C 2, 148
Teorema de Schaerz, 148Funções Implícitas, 183
Geometria Analítica, 11, 23, 41Coordenadas, 13Distância, 22Espaços Euclidianos, 11Forma Simétrica, 26Generalizações, 33Introdução, 11
Gráfico, 75Gradiente, 170
Ângulo de Interseção, 190, 199Conjuntos de Nível, 186Curvas de Nível, 187Geometria do, 175
Superfícies de Nível, 192
Hessiana, 217
406
8/20/2019 Calculo - Volume 2 - Mauricio Vilches
http://slidepdf.com/reader/full/calculo-volume-2-mauricio-vilches 407/407
ÍNDICE 407
Integração Dupla, 271aplicação, 324, 339centro de massa, 341extensão, 288linearidade, 275massa total, 340
momento de inércia, 343momento de massa, 340mudança de coordenadas, 303partição, 271propriedades, 275regiões elementares, 284significado geométrico, 272sobre Retângulos, 271soma de Riemann, 272teorema de Fubini, 277volume, 289
Integração Tripla, 349extensão, 357linearidade, 351mudança de coordenadas, 365propriedades, 351sobre paralelepípedos, 349soma de Riemann, 350teorema de Fubini, 352
Integração Triplasregiões elementares, 353
Integrais Iteradas, 275 Jacobiano, 305, 365
LeiGay - Lussac, 68Newton, 68
leide Poiseuille, 69
Limites, 101fi
Exemplos, 221Introdução, 209Otimização, 227
Máximos e Mínimos Absolutos, 236Teo de Weierstrass, 238
Momento de Inércia, 343
Mudança Cilíndrica, 367Mudança de Coordenadascilíndrica, 367esférica, 375linear, 308polar, 314
Mudança Esférica, 375Mudança Linear, 308Mudança Polar, 314Mudanças de Coordenadas, 303, 365
integral dupla, 307
integral tripla, 366 jacobiano, 305, 365
Multiplicadores de Lagrange, 240Generalização, 257Otimização, 249
Norma Euclidiana , 15
Partição, 349Plano Tangente, 135Planos, 27
Ângulos entre Planos, 29Paralelismo e Perp, 30Ponto Crítico, 211Ponto de Sela, 211Produto Escalar, 15, 34
Vetores Ortogonais, 15Produto Vetorial, 19
Torque, 22
Regiões Elementares 284