c2 process models part ii
TRANSCRIPT

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 1/40
C h ư ơ n g 1
C h ư ơ n g 1
18/08/2006
Ch ng : Mô hình quá trình
phần II
ĐĐiiềềuu khikhiểểnn ququáá trtrììnhnh
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 2/40
2Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
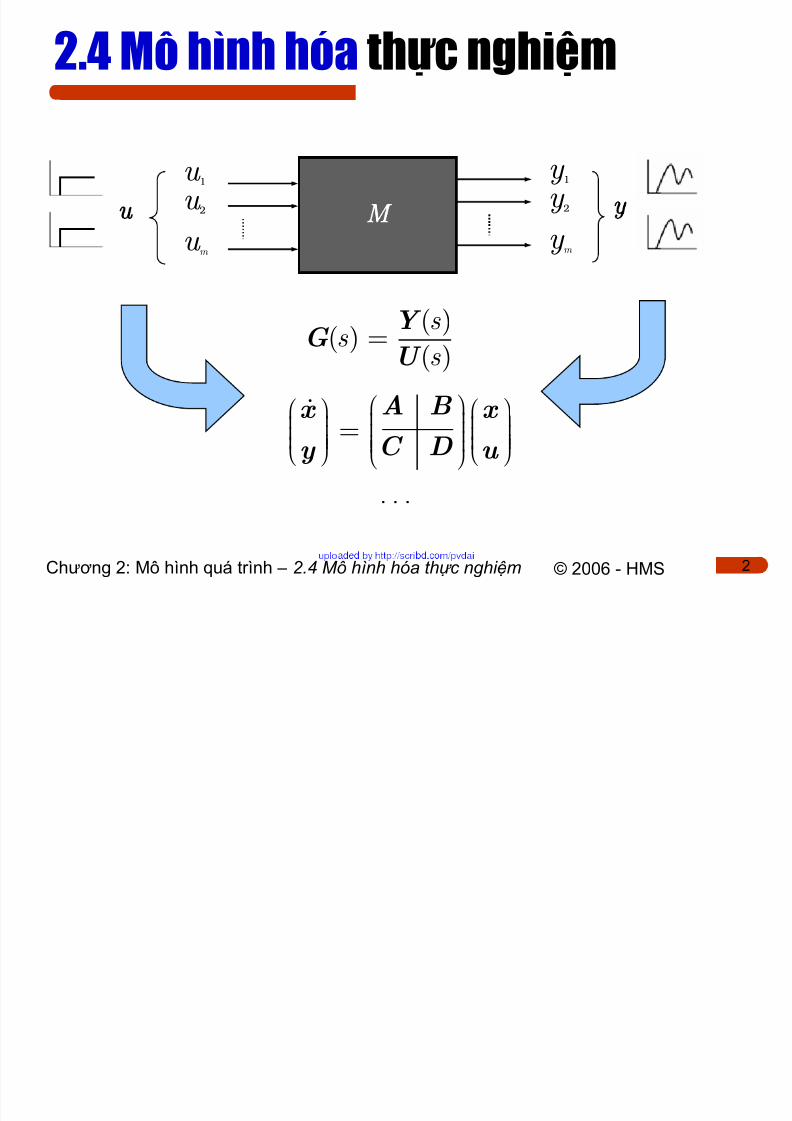
2.4 Mô hình hóa thự c nghiệm
u 1
u 2u m
y 1
y 2y m
y
( )( )( )s
s s
=Y
G U
⎞⎛⎞ ⎞⎛ ⎛⎟⎜⎟ ⎟⎜ ⎜⎟=⎟ ⎟⎜⎜ ⎜⎟⎟ ⎟⎜⎟ ⎟⎜ ⎜⎟⎜⎝ ⎝⎠ ⎠⎝ ⎠ A B x x
C D y u
. . .

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 3/40
3Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Ví dụ minh họa ₫ơ n giản
Giả thiế t: y = a 0 + a 1u Đặt = [a 0 , a 1]
T
Dãy số liệu thự c nghiệm: = [u1, u2, u3]T = [y1, y2, y3]
T
Hệ phương trình:
Nghiệm tối ưu:
u y
1 10
2 21
3 3
1 u y1 u y
1 u y
a
a
Φ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
1( )T T −= Φ Φ Φ yθ
u
y
××
×
u1 u2 u3
y 1
y 2
y 3
Chỉ n giản là xấp xỉ a thức?

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 4/40
4Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Có một vài v ấ n ₫ề trong ví dụ …
T ạ i sao lạ i lấ y 3 cặ p số liệu mà không phả i là 2, 4,5, 6, …?
Nế u số liệu đo không chính xác thì sao?
Làm sao biế t tr ướ c đượ c y = a 0 + a 1u. Nế u là khác thì sao?
Ta đã bỏ qua y ế u t ố thờ i gian. Cái chúng ta cầ nquan tâm không chỉ là quan hệ t ĩnh, mà quantr ọng hơ n chính là đặ c tính động học của hệthống! (nghĩa là quan hệ giữ a u(t) và y(t))
…
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 5/40
5Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Định ngh ĩa nhận dạng
Phươ ng pháp xây dự ng mô hình toán học trên cơ sở các số liệu vào-ra thự c nghiệm đượ c gọi là mô
hình hóa th ự c nghi ệ m hay nh ậ n d ạ ng h ệ th ố ng
(system identification ).
Theo IEC 60050-351: “Nh ậ n d ạ ng h ệ th ố ng là
nh ữ ng th ủ t ụ c suy lu ậ n m ộ t mô hình toán h ọ c bi ể udi ễ n ₫ặ c tính t ĩ nh và ₫ặ c tính quá ₫ộ c ủ a m ộ t h ệ th ố ng t ừ ₫ áp ứ ng c ủ a nó ₫ố i v ớ i m ộ t tín hi ệ u ₫ầ uvào xác ₫ị nh rõ, ví d ụ hàm b ậ c thang, m ộ t xungho ặ c nhi ễ u t ạ p tr ắ ng ”.
Theo Lofti A. Zadeh: Trên cơ sở quan sát số liệu vào/ra thự c nghiệm, các định các tham số của môhình t ừ một lớ p các mô hình thích hợ p, sao cho
sai số là nhỏ nhấ t.

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 6/40
6Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Các yế u tố cơ bản của nhận dạng
Số liệu vào/ra thự c nghiệm: — Xác định như thế nào? Trong điều kiện nào? — Dạ ng nhiễu (nhiễu quá trình, nhiễu đo), độ lớ n của
nhiễu? Dạ ng mô hình, cấ u trúc mô hình
— Mô hình phi tuy ế n/tuy ế n tính, liên t ục/gián đoạ n hàm
truy ền đạ t/không gian tr ạ ng thái, … — Bậ c mô hình, thờ i gian tr ễ
Chỉ tiêu đánh giá chấ t lượ ng mô hình
— Mô phỏng và so sánh v ớ i số liệu đo như thế nào? Thuậ t toán xác định tham số
— R ấ t đa dạ ng -> thuậ t toán nào phù hợ p v ớ i bài toán nào?

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 7/40
7Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Các bướ c tiế n hành
1. Thu thậ p, khai thác thông tin ban đầ u v ề quá trình (“apriori” information )2. L ự a chọn phươ ng pháp nhậ n dạ ng (tr ự c tuy ế n/
ngoạ i tuy ế n, vòng hở /vòng kín, chủ động/bị động,thuậ t toán nhậ n dạ ng, ...).
3. L ấ y số liệu thự c nghiệm cho t ừ ng cặ p biế n vào/ra, x ử lý thô các số liệu nhằ m loạ i bỏ nhữ ng giá tr ị đo
kém tin cậ y.4. Quy ế t định v ề dạ ng mô hình và giả thiế t ban đầ u v ề cấ u trúc mô hình
5. L ự a chọn thuậ t toán và xác định các tham số mô
hình6. Mô phỏng, kiểm chứ ng và đánh giá mô hình7. Quay lạ i một trong các bướ c 1-4 nế u cầ n
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 8/40
8Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Phân loại các phươ ng pháp nhận dạng
Theo dạ ng mô hình sử dụng: phi tuy ế n/tuy ế ntính, liên t ục/gián đoạ n, mô hình thờ i gian/t ầ n số
Theo dạ ng số liệu thự c nghiệm: chủ động/bị động Theo mục đích sử dụng mô hình: tr ự c tuy ế n,
ngoạ i tuy ế n
Theo thuậ t toán ướ c lượ ng mô hình: — bình ph ươ ng t ố i thi ể u (least squares , LS), — phân tích t ươ ng quan (correlation analysis ), phân tích ph ổ
(spectrum analysis
), — ph ươ ng pháp l ỗ i d ự báo ( prediction error method , PEM) — ph ươ ng pháp không gian con (subspace method ).
Nhậ n dạ ng vòng hở /vòng kín
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 9/40
9Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
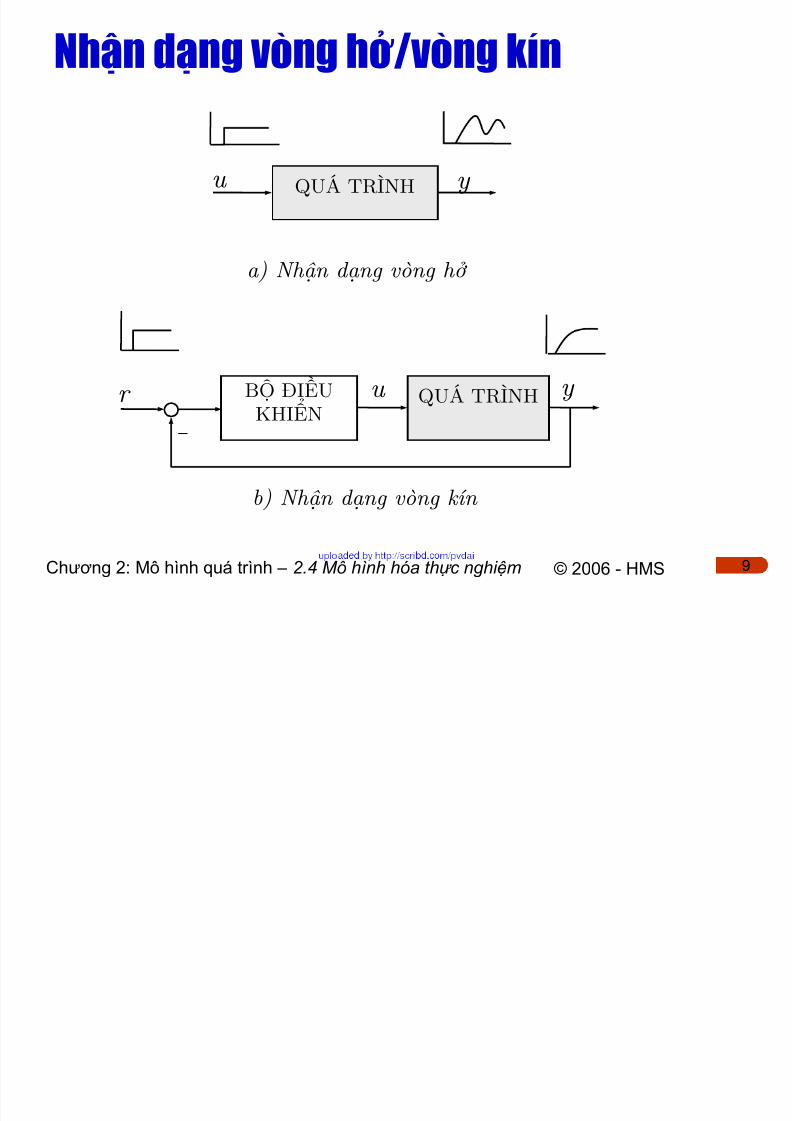
Nhận dạng vòng hở /vòng kín
QUÁ TRÌNHu y
a) Nhận dạng vòng hở
QUÁ TRÌNHBỘ ĐIỀU
KHIỂN
u y r
b) Nhận dạng vòng kín
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 10/40
10Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Đánh giá và kiểm chứ ng mô hình
T ốt nhấ t: Bộ số liệu phục v ụ kiểm chứ ng khác bộsố liệu phục v ụ ướ c lượ ng mô hình
Đánh giá trên miền thờ i gian:
— h là chu k ỳ trích mẫ u tín hiệu (chu k ỳ thu thậ p số liệu) — k là bướ c trích mẫ u tín hiệu (bướ c thu thậ p số liệu) – y là giá tr ị đầ u ra đo đượ c thự c nghiệm
— là giá tr ị đầ u ra dự báo trên mô hình Đánh giá trên miền t ầ n số
2
1
1ˆ[ ( ) ( )]
N
k
y kh y khN
ε =
= −∑
ˆ y
ˆ ( ) )max 100%
( )
G j G jE
G jω
ω ω
ω ∈
⎧ ⎫− (⎪ ⎪= ×⎨ ⎬
⎪ ⎪⎩ ⎭O
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 11/40
11Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
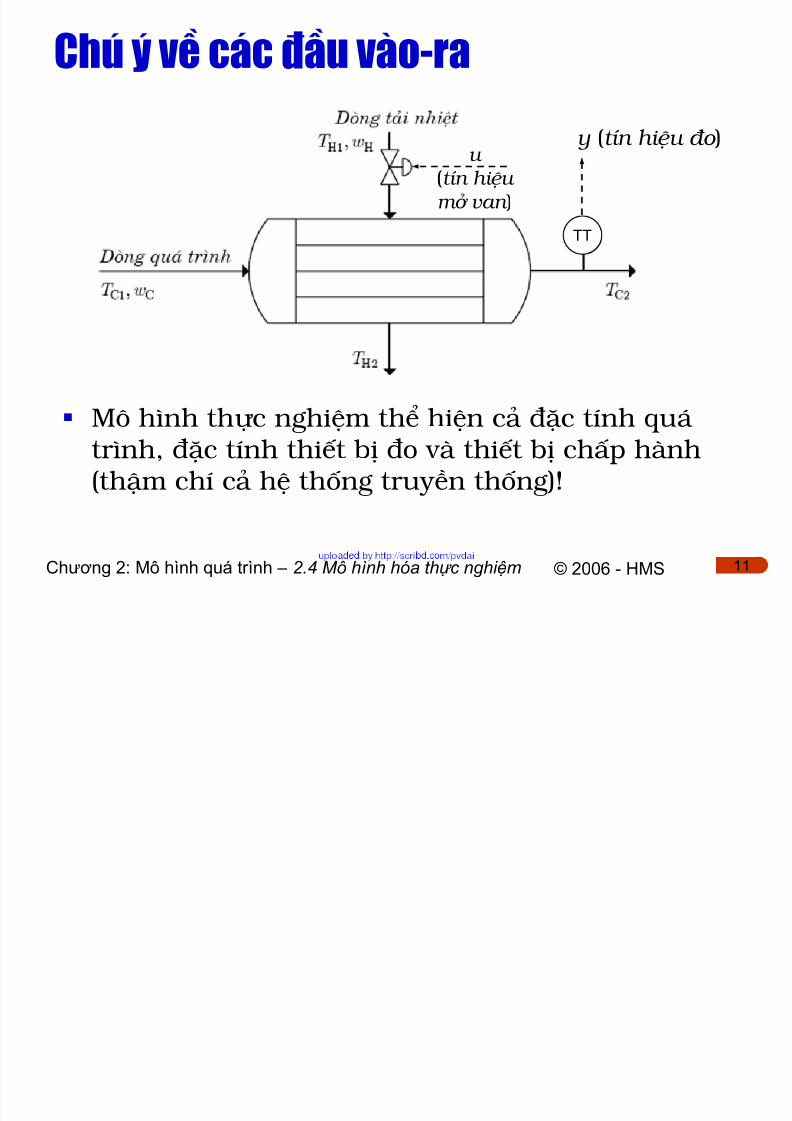
Chú ý v ề các ₫ầu vào-ra
Mô hình thự c nghiệm thể hiện cả đặ c tính quá trình, đặ c tính thiế t bị đo và thiế t bị chấ p hành(thậ m chí cả hệ thống truy ền thống)!
TT
u
(tín hi ệ u
m ở van )
y (tín hi ệ u ₫ o )

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 12/40
12Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2.4.1 Nhận dạng dự a trên ₫ áp ứ ng quá ₫ộ

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 13/40
13Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
X ấ p x ỉ v ề mô hình ₫ơ n giản
Đ áp ứ ng quán tính (a): có thể x ấ p x ỉ thành môhình quán tính bậ c nhấ t hoặ c bậ c hai có tr ễ — FOPDT: first order plus dead-time — SOPDT: second order plus dead-time
Đ áp ứ ng dao ₫ộ ng t ắ t d ầ n (c): có thể x ấ p x ỉ thànhmô hình dao động bậ c hai (SOPDT).
Đ áp ứ ng tích phân (d): có thể đư a v ề x ấ p x ỉ thànhmô hình quán tính bậ c nhấ t hoặ c bậ c hai có tr ễcộng thêm thành phầ n tích phân.
Đ áp ứ ng quán tính - ng ượ c (b): mô hình có chứ ađiểm không nằ m bên phả i tr ục ả o (hệ pha khôngcự c tiểu) => cầ n phươ ng pháp chính xác hơ n
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 14/40
14Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
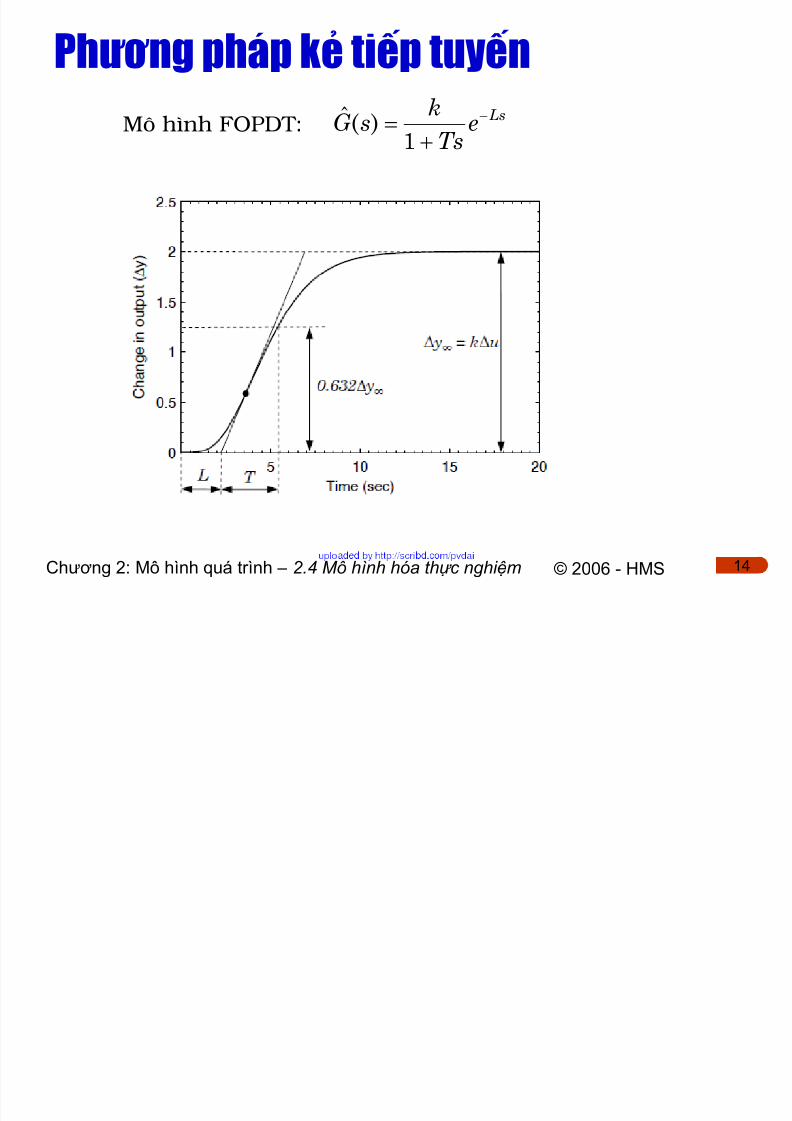
Phươ ng pháp k ẻ tiế p tuyế n
Mô hình FOPDT: ˆ ( )1
LskG s eTs
−=+

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 15/40
15Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
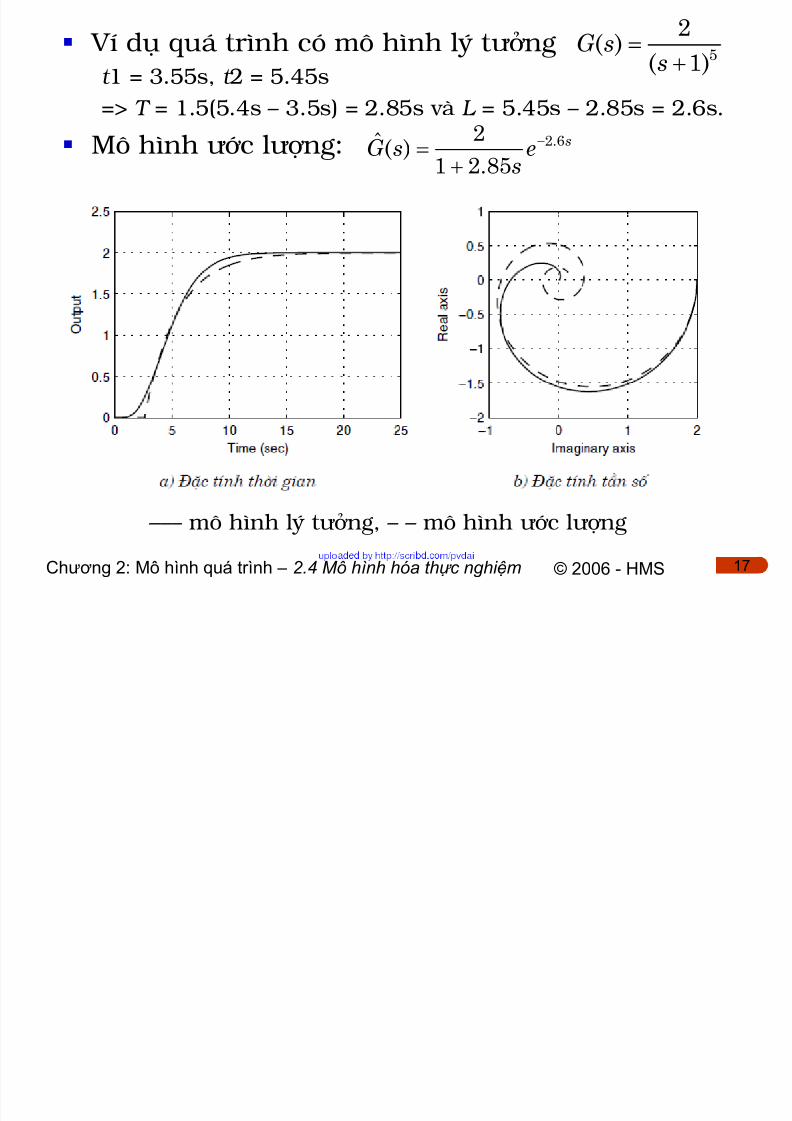
Ví dụ quá trình có mô hình lý t ưở ng
Mô hình ướ c lượ ng:
5
2( )
( 1)G s
s=
+
2.22ˆ ( )1 3.25
sG s es
−=+
——— mô hình lý t ưở ng, — — mô hình ướ c lượ ng

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 16/40
16Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Phươ ng pháp hai ₫ iểm qui chiế u
Mô hình FOPDT: ˆ ( )1
LskG s eTs
−=+
2 1
1 2 2
1.5( )
1.5( / 3)
T t t
L t t t T = −= − = −
2
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 17/40
17Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Ví dụ quá trình có mô hình lý t ưở ngt 1 = 3.55s, t 2 = 5.45s
=> T = 1.5(5.4s — 3.5s) = 2.85s và L = 5.45s — 2.85s = 2.6s. Mô hình ướ c lượ ng:
5
2( )
( 1)G s
s=
+
2.62ˆ ( )1 2.85
sG s es
−=+
——— mô hình lý t ưở ng, — — mô hình ướ c lượ ng
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 18/40
18Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
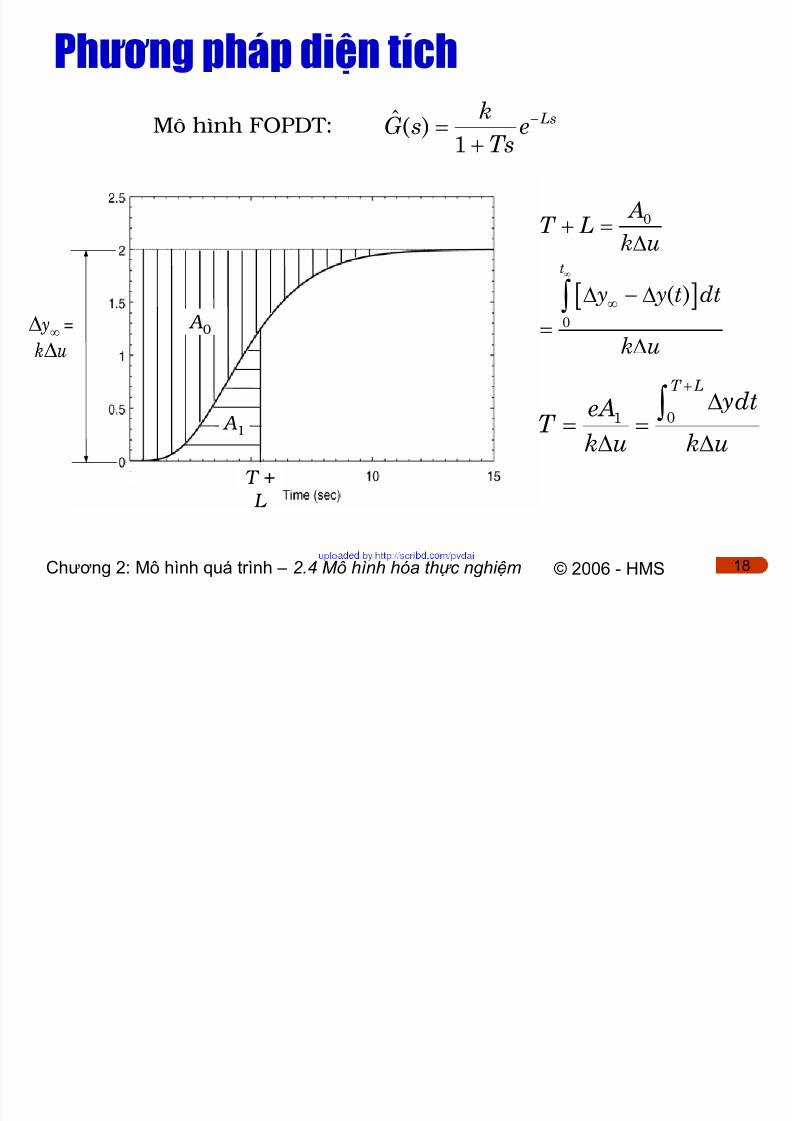
Phươ ng pháp diện tích
Mô hình FOPDT: ˆ ( )1
LskG s eTs
−=+
T +L
Δ y∞ =
kΔu
A 0
A 1
[ ]
0
0
( )
t
AT Lk u
y y t dt
k u
∞
∞
+ =Δ
Δ − Δ
=Δ∫
01
T L
dteAT k u k u
+Δ
= =Δ Δ∫
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 19/40
19Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
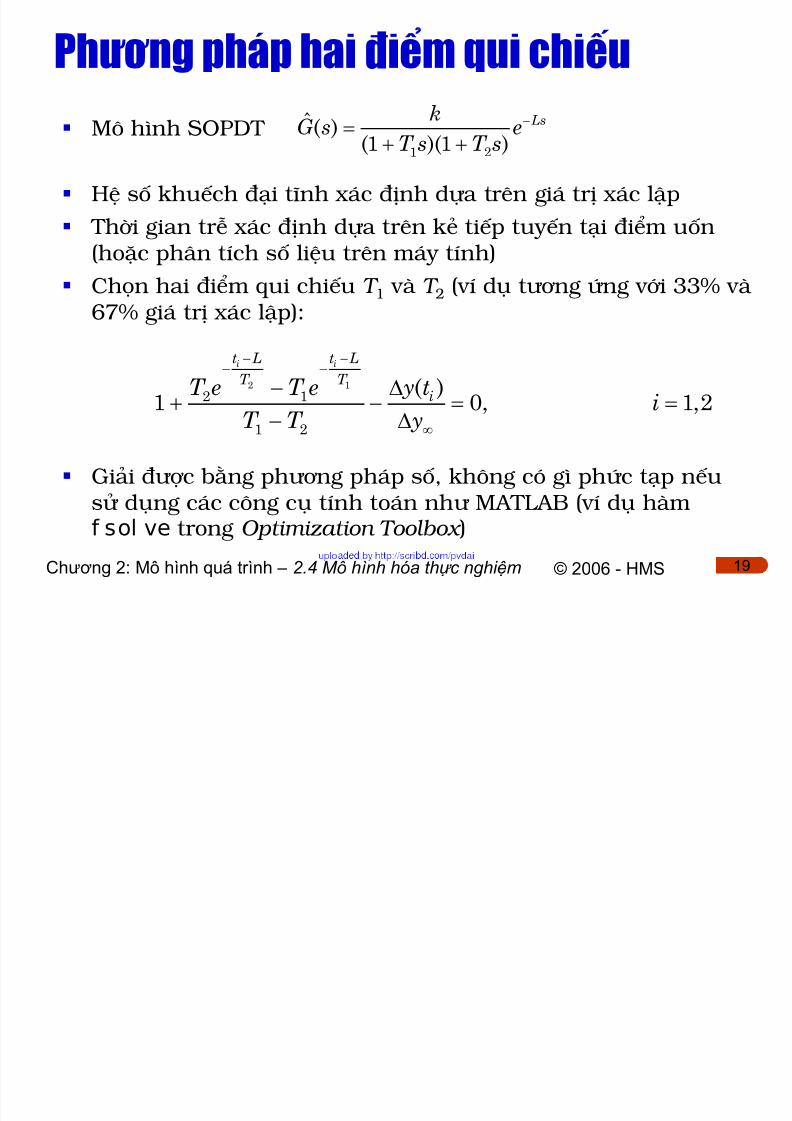
Phươ ng pháp hai ₫ iểm qui chiế u
Mô hình SOPDT
Hệ số khuế ch đạ i t ĩnh xác định dự a trên giá tr ị xác lậ p
Thờ i gian tr ễ xác định dự a trên k ẻ tiế p tuy ế n t ạ i điểm uốn(hoặ c phân tích số liệu trên máy tính)
Chọn hai điểm qui chiế u T 1 và T 2 (ví dụ t ươ ng ứ ng v ớ i 33% và
67% giá tr ị xác lậ p):
Giả i đượ c bằ ng phươ ng pháp số, không có gì phứ c t ạ p nế usử dụng các công cụ tính toán như MATLAB (ví dụ hàmf sol ve trong Optimization Toolbox )
1 2
ˆ ( )(1 )(1 )
LskG s e
T s T s
−=+ +
2 1
2 1
1 2
( )1 0, 1,2
i it L t L
T T i y tT e T e
iT T y
− −− −
∞
Δ−+ − = =
− Δ
2
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 20/40
20Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
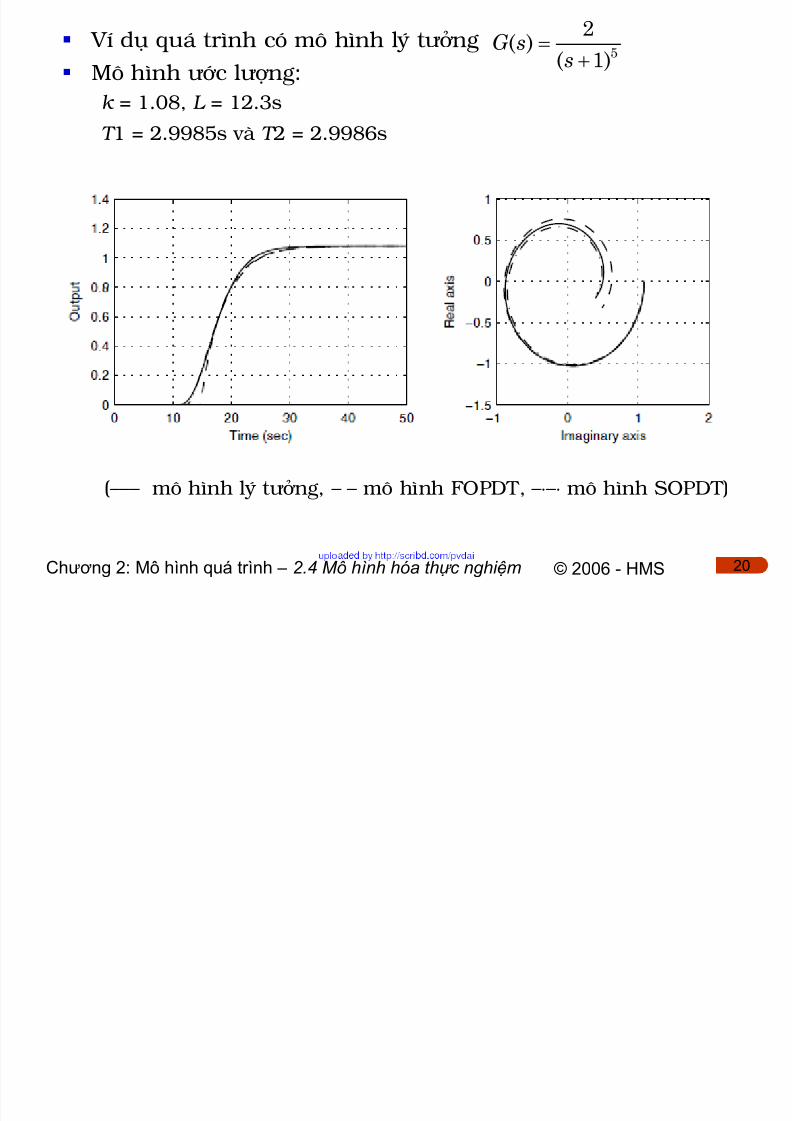
Ví dụ quá trình có mô hình lý t ưở ng
Mô hình ướ c lượ ng:
k = 1.08, L = 12.3sT 1 = 2.9985s và T 2 = 2.9986s
5
2( )
( 1)G s
s=
+
(——— mô hình lý t ưở ng, — — mô hình FOPDT, — ⋅ — ⋅ mô hình SOPDT)

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 21/40
21Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Mô hình chứ a khâu tích phân
Mô hình hàm truy ền:
Có thể đư a v ề nhậ n dạ ng mô hình FOPDT hoặ c
SOPDT : — Sử dụng tín hiệu kích thích dạ ng xung thay cho tín hiệu
bậ c thang. — Sử dụng tín hiệu kích thích dạ ng bậ c thang, như ng lấ y
số liệu là đạ o hàm của tín hiệu đầ u ra thay cho tr ự c tiế pgiá tr ị đầ u ra. Nhượ c điểm: có thể đư a quá trình ra khỏiphạ m vi làm việc cho phép.
1
(1 )
LsIT D
kG e
s Ts
−=+
2
1 2(1 )(1 )
LsIT D
kG e
s T s T s
−=
+ +
ả ồ
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 22/40
22Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2.4.2 Phươ ng pháp phản hồi rơ -le
Åström và Hägglund đư a ra nă m 1984 để ướ clượ ng h ệ s ố khu ế ch ₫ạ i t ớ i h ạ n K u và chu k ỳ dao
₫ộ ng t ớ i h ạ n T u
=> chỉnh định bộ PID theo phươ ngpháp Ziegler-Nichols 2
Thự c chấ t là một phươ ng pháp t ầ n số, chỉ nhậ ndạ ng đượ c đặ c tính t ầ n số t ạ i t ầ n số t ươ ng ứ ng
v ớ i 180O của hệ kín Một trong nhữ ng phươ ng pháp nhậ n dạ ng hệ kín
đượ c sử dụng nhiều nhấ t bở i các ư u điểm: — Đơ n giả n, dễ tiế n hành — Ít chịu ả nh hưở ng của nhiễu — Nhậ n dạ ng hệ kín xung quanh điểm làm việc
ế

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 23/40
23Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Cách thứ c tiế n hành
G( s)u yr=0 +d
-d1 4
( )
u
u
d K
G j aω π
= =
2 3 ố ể

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 24/40
24Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2.4.3 Thuật toán bình phươ ng tố i thiểu
Giả sử quá trình có thể đượ c mô t ả bở i
— y (t i ) là giá tr ị của đạ i lượ ng quan sát t ạ i thờ i điểm t i
— là vector tham số của mô hình cầ n xác định — là vector hàm biế t tr ướ c (vector hồi qui)
cầ n đượ c lự a chọn nhằ m t ối thiểu hóa hàm mục tiêu chomột khoả ng thờ i gian quan sát [t 1, t N ]:
1 1 2 2( ) ( ) ( ) ( ) ( )T i i i n i n i y t t t t tϕ θ ϕ θ ϕ θ ϕ θ = + + + =
θ T ϕ
[ ]1 2
T
nθ θ θ θ = … [ ]1 2( ) ( ) ( ) ( )T i i i n it t t tϕ ϕ ϕ ϕ = …
θ
( ) ( )22
1 0
ˆ( , ) ( ) ( ) ( ) ( )N N
T N i i i i
i i
V t y t y t y t tθ ϕ θ
= =
= − = −∑ ∑
ử
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 25/40
25Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Sử dụng các ký hiệu:
Ta có thể viế t
Đư a v ề bài toán tìm nghiệm t ối ư u toàn phươ ng
Nghiệm t ối ư u v ớ i khả đả o và n ≤ N (ĐK kíchthích)
1( ),
( )
T
N n
T N
t
t
ϕ
ϕ
×⎡ ⎤⎢ ⎥
Φ = Φ ∈ ℜ⎢ ⎥⎢ ⎥⎣ ⎦
11
( ),
( )
N
N
y t
y t
ψ ψ ×⎡ ⎤⎢ ⎥= ∈ ℜ⎢ ⎥⎢ ⎥⎣ ⎦
θ ψ Φ =
ˆ arg min ( ) ( )T θ ψ θ ψ θ ⎡ ⎤= − Φ − Φ⎣ ⎦
1 †ˆ ( )T T θ ψ ψ −= Φ Φ Φ = Φ
T Φ Φ
Ướ l h ố ô hì h FIR

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 26/40
26Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Ướ c lượ ng tham số mô hình FIR
Mô hình đáp ứ ng xung hữ u hạ n ( finite impulse response ,FIR):
Xác định dãy tr ọng lượ ng { g i }
Đặ t vector tham số:
Vector hồi quy:
1
( ) ( )n
i i
y t g u t i =
= −
∑
[ ]1 2T
n g g g = …θ
[ ]( ) ( 1) ( 2) ( )T t u t u t u t n = − − −…ϕ
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 27/40
27Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Chọn thờ i gian quan sát t ừ (n + 1) đế n t, ta có:
u (t ) phả i đả m bả o điều kiện kích thích. Giả sử tín hiệu bậ c
thang đượ c chọn, khả nă ng r ấ t cao là một số cột của Φ sẽgiống nhau hoàn toàn và do đó phụ thuộc tuy ế n tính.
=> Tín hiệu thích hợ p nhấ t là dạ ng ngẫ u nhiên, ví dụ ồntr ắ ng hoặ c PRBS ( pseudo random binary signal )
[ ]( 1) ( 2) ( ) T y n y n y t = + + ψ
( ) ( 1) (1)
( 1) ( 2) ( )
u n u n u
u t u t u t n
⎡ ⎤−⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥− − −⎣ ⎦
Φ
1 †ˆ ( )T T −= =Φ Φ Φ Φθ ψ ψ
Ví d ớ l ô hì h FIR
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 28/40
28Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
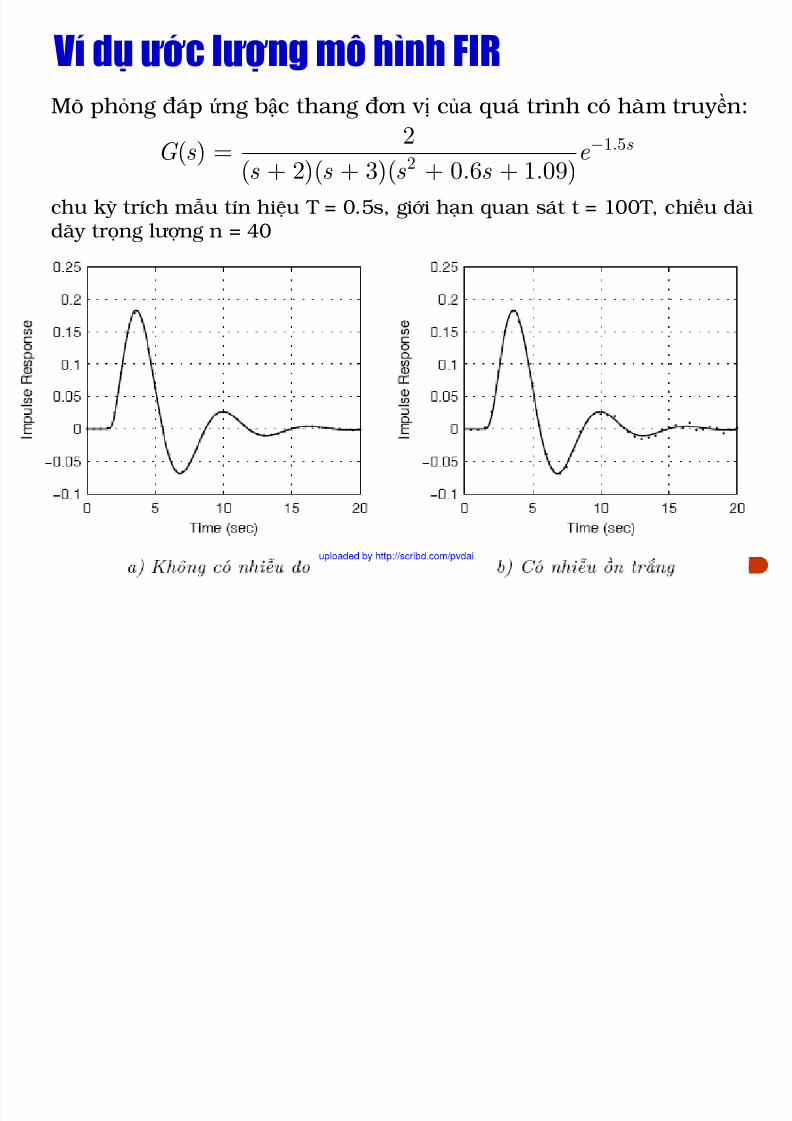
Ví dụ ướ c lượ ng mô hình FIR
Mô phỏng đáp ứng bậc thang đơ n v ị của quá trình có hàm truy ền:
chu k ỳ trích mẫ u tín hiệu T = 0.5s, giớ i hạ n quan sát t = 100T, chiều dàidãy tr ọng lượ ng n = 40
1.52
2( )
( 2)( 3)( 0.6 1.09)s G s e
s s s s
−=
+ + + +
Ước l ng tham số mô hình ARX

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 29/40
29Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Ướ c lượ ng tham số mô hình ARX
1 1( ) ( ) ( ) ( ) ( )A q y t B q u t d e t − −= − +
1 1
11 1
0 1( ) 1( )
n a
n a n b
n b
A q a q a q
B q b b q b q
− − −
− − −
= + + +
= + + +
Giả sử quá trình đư ợ c mô t ả bở i mô hình ARX:
trong đó d > 0 (cho tr ư ớ c) và
1
0 1
( ) ( 1) ( )
( ) ( 1) ( ) ( )na a
nb b
y t a y t a y t n
b u t d b u t d b u t d n e t
= − − − − − +
+ − + − − + + − − +
Phươ ng trình đư ợ c viết lại dư ớ i dạng
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 30/40
30Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
[ ]1 0 T na nba a b b= θ
[ ]( ) ( 1) ( ) ( ) ( )T a bt y t y t n u t d u t d n = − − − − − − − ϕ
ˆ( ) ( ) ( ) ( ) ( )T y t t e t y t e t = + = +ϕ θ
ta có thể viết
Đặt vector tham số mô hình cần xác định là
và véc t ơ hồi quy
Mô hình t ốt nhất đư ợ c coi là mô hình đư a ra dự báo lỗi nhỏ
nhất theo ngh ĩ a bình phươ ng t ối thiểu, t ức là
( )2
1
ˆ ˆarg min ( ) ( , )N
i i
i
y t y t
=
= −∑θ θ

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 31/40
Ví dụ quá trình có mô hình lý t ưở ng

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 32/40
32Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
ụ q ý g
đượ c mô phỏng cho tr ườ ng hợ p không có nhiễu đo và cónhiễu t ạ p tr ắ ng (t ỉ lệ NSR 5%) để lấ y số liệu
Chu k ỳ trích mẫ u T = 0.5s, giớ i hạ n quan sát t = 10s (20*T)
Cấ u trúc mô hình đượ c chọn: na = nb = 3, d = 3
K ế t quả kiểm chứ ng mô hình nhậ n đượ c
1.52
2( )
( 2)( 3)( 0.6 1.09)s G s e
s s s s
−=
+ + + +
Lựa chọn cấu trúc mô hình
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 33/40
33Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Lự a chọn cấ u trúc mô hình
Thờ i gian tr ễ biế t tr ướ c: chọn na = nb và tiế nhành ướ c lượ ng tham số theo một quy trình lặ p, bắ t đầ u v ớ i một số nhỏ cho đế n khi sai lệch mô
hình (kiểm chứ ng dự a trên bộ số liệu thự c nghiệmkhác) có thể chấ p nhậ n đượ c. Thờ i gian tr ễ chư a biế t tr ướ c: tiế n hành như trên
như ng sau đó kiểm tra các tham số của mô hình.Nhữ ng tham số đầ u của đa thứ c t ử số có giá tr ị x ấ p x ỉ không cho biế t thông tin v ề thờ i gian tr ễcủa quá trình => giả m bậ c của cả hai đa thứ c t ử
và mẫ u (t ứ c na và nb) đúng bằ ng số tham số của x ấ p x ỉ không, sau đó chạ y lạ i thuậ t toán ướ clượ ng tham số một lầ n nữ a để tìm ra mô hình cótr ễ thự c.
2 4 4 MATLAB Identification Toolbox

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 34/40
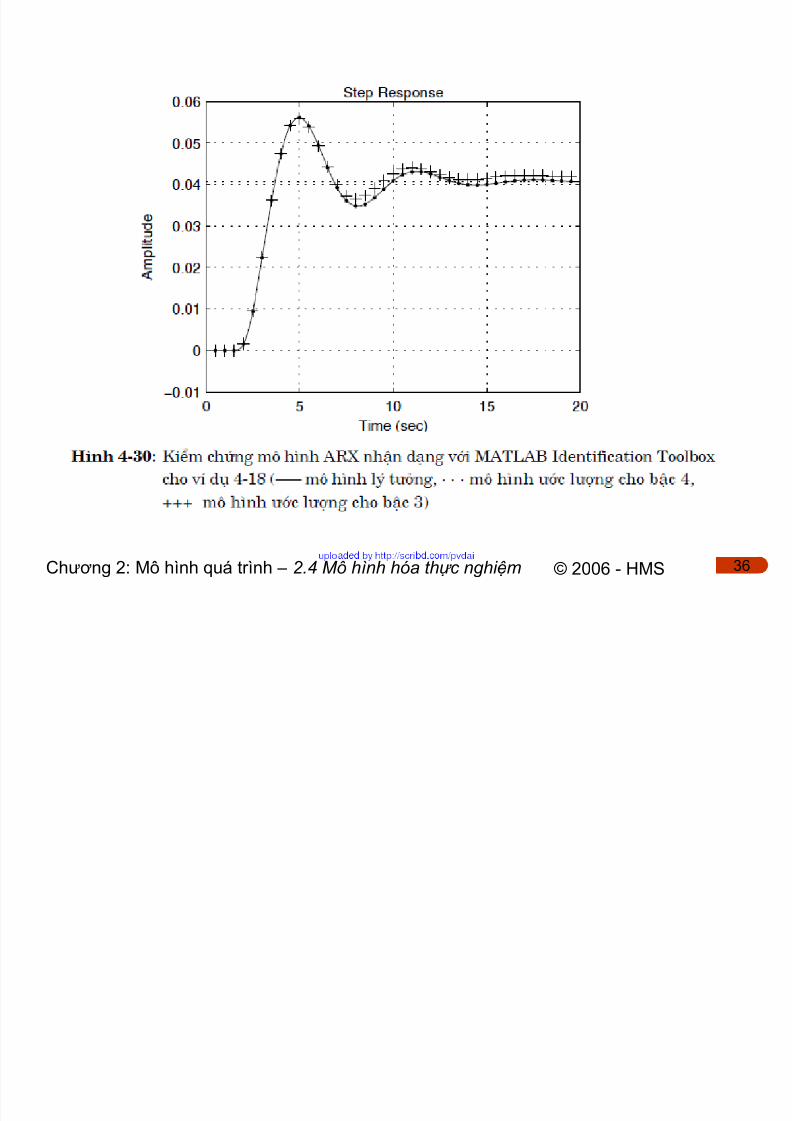
34Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2.4.4 MATLAB Identification Toolbox
Biểu diễn số liệu thự c nghiệmDat a = i ddat a( y, u, Ts)
Dạ ng mô hình sử dụng: — Đáp ứ ng t ầ n số: t ạ o mô hình bằ ng lệnh i df r d
— Các mô hình đa thứ c (ARX, ARMAX, Box-Jenkins, PE,...):t ạ o mô hình bằ ng các lệnh i dpol y, i dar x, ...
— Mô hình tr ạ ng thái: t ạ o mô hình bằ ng lệnh i dss
Thuậ t toán ướ c lượ ng môhình: — Mô hình FIR: hàm i mpul se
— Mô hình đáp ứ ng t ầ n số: hàm spa và et fe — Mô hình ARX và AR: hàm ar x, ax, i v4 và i vx
— Ướ c lượ ng mô hình ARMAX và ARMA: hàm ar max
— Ướ c lượ ng mô hình tr ạ ng thái: hàm n4si d
Ví dụ quá trình có mô hình lý t ưở ng

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 35/40
35Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
% create simulation data
G = zpk([],[-0.3+j -0.3-j -5 -9],2, 'Inputdelay',1.5);
h = 0.5;time = [0:h:20]';
u = randn(size(time));
y = lsim(G,u,time);
% estimate model parametersdata = iddata(y,u,h);
M1 = arx(data,[3 3 3]);
M2 = arx(data,[4 4 3]);
% plot step responsesstep(M1,'k+',M2,'k.',20);
hold on;
step(G,'k-',20);
grid on;
1.52
2( )
( 5)( 9)( 0.6 1.09)s G s e
s s s s
−=
+ + + +
Mã chươ ng trình
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 36/40
36Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2 4 5 Lựa chọn phương pháp nhận dạng

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 37/40
37Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
2.4.5 Lự a chọn phươ ng pháp nhận dạng
Quá trình cho phép nhận dạng chủ ộng và ối tượng cóthể xấp xỉ về mô hình FOPDT hoặc có thể có thêm thành
phần tích phân):
— Phươ ng pháp hai điểm qui chiế u theo đơ n giả n và dễ ápdụng tr ự c quan nhấ t, — Nế u có nhiễu đo và thuậ t toán đượ c thự c hiện trên máy
tính thì phươ ng pháp diện tích cho k ế t quả chính xác
hơ n. Quá trình cho phép nhận dạng chủ ộng và phư ng pháp
thiết kế iều khiển sử dụng trực tiếp mô hình gián oạn:
— Nên chọn các phươ ng pháp ướ c lượ ng dự a trên nguyênlý bình phươ ng t ối thiểu áp dụng cho mô hình phù hợ p
v ớ i bài toán điều khiển (FIR, ARX, ARMAX,…).

8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 38/40
38Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Quá trình không cho phép nhận dạng chủ ộng vòng hở:
— Phươ ng pháp nhậ n dạ ng dự a trên phả n hồi r ơ -le và cácphiên bả n cả i tiế n t ỏ ra t ươ ng đối đa nă ng và đặ c biệtphù hợ p cho thiế t k ế điều khiển trên miền t ầ n số.
— Nế u chấ t lượ ng mô hình cầ n cao hơ n thì nên áp dụng
các phươ ng pháp bình phươ ng t ối thiểu. Quá trình hoàn toàn không cho phép nhận dạng chủ ộng:
— Nế u phươ ng pháp thiế t k ế điều khiển sử dụng tr ự c tiế p
mô hình gián đoạ n thì các phươ ng pháp bình phươ ng t ốithiểu là phù hợ p nhấ t. — Chỉ nên sử dụng phươ ng pháp phân tích phổ tín hiệu
khi phươ ng pháp thiế t k ế điều khiển hoàn toàn trên đặ c
tính t ầ n số.
Tóm tắt yêu cầu bài giảng
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 39/40
39Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Hiểu rõ các y ế u t ố cơ bả n trong xây dự ng mô hình bằ ng phươ ng pháp thự c nghiệm
Nắ m
đượ c các v
ấ n
đềkhó kh
ă n, tr
ở ng
ạ i trong các bướ c tiế n hành nhậ n dạ ng
Hiểu đượ c nguyên t ắ c cơ bả n và có đượ c k ỹ nă ngt ự thự c hiện đượ c (bằ ng mô phỏng) phươ ng phápướ c lượ ng các mô hình đơ n giả n dự a trên đáp ứ ng bậ c thang đơ n v ị/phươ ng pháp phả n hồi r ơ -le
Nắ m đượ c nguyên t ắ c cơ bả n của phươ ng pháp bình phươ ng cự c tiểu, áp dụng đượ c trên hai lớ pmô hình FIR và ARX (thông qua mô phỏng)
Nắ m đượ c sơ lượ c v ề chọn phươ ng pháp
Tóm tắt yêu cầu bài giảng
Phần tự học/tự nghiên cứu
8/12/2019 C2 Process Models Part II
http://slidepdf.com/reader/full/c2-process-models-part-ii 40/40
40Chương 2: Mô hình quá trình – 2.4 Mô hình hóa thự c nghi ệm © 2006 - HMS
Đọc thêm — Chươ ng 4 cuốn sách giáo trình: Cơ sở hệ thống điều
khiển quá trình.
— Cuốn sách “Nhậ n dạ ng hệ thống điều khiển” (tác giả PGS. Nguy ễn Doãn Phướ c)
— Cuốn sách “System Identification — Theory for Users” (tácgiả : L. Ljung).
Câu hỏi, bài t ậ p: — Các câu hỏi và bài t ậ p cuối chươ ng 4 trong sách giáo
trình
— Sử dụng MATLAB, chạ y lạ i các ví dụ trong bài giả ng vàtrong chươ ng 4 của cuốn sách
— T ự lấ y ví dụ và áp dụng các phươ ng pháp đã học.
Phần tự học/tự nghiên cứ u