by james dennis musick
DESCRIPTION
Target Tracking a Non-Linear Target Path Using Kalman Predictive Algorithm and Maximum Likelihood Estimation. by James Dennis Musick. Agenda. Introduction Problem Definition Kalman Filter Target Discrimination Conclusion Future Work. Introduction. - PowerPoint PPT PresentationTRANSCRIPT

Target Tracking a Non-Linear Target Path
Using Kalman Predictive Algorithm and Maximum
Likelihood Estimationby
James Dennis Musick

Agenda
• Introduction
• Problem Definition
• Kalman Filter
• Target Discrimination
• Conclusion
• Future Work

Introduction
• In the field of biomechanical research there is a subcategory that studies human movement or activity by video-based analysis
• Markers used– Optical
– RF
– Passive reflective
– Etc…
• Video based motion analysis
• 2D Analysis
• 3D analysis
• Golf swing example

Problem Definition
• In order to track the following have to be accomplished– Path Prediction– Discrimination

Problem Definition cont.
• Trials used– Walking Trial– Jumping Trial– Waving Wand Trial– Increasing complexity

Video Target Identification
• Threshold
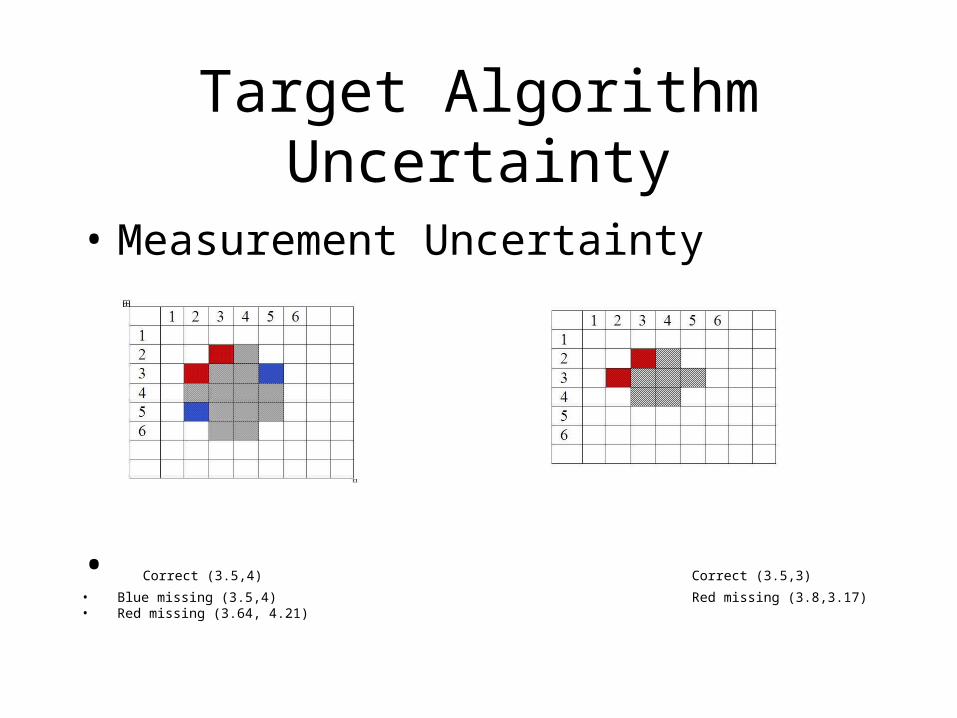
Target Algorithm Uncertainty
• Measurement Uncertainty
• Correct (3.5,4) Correct (3.5,3)
• Blue missing (3.5,4) Red missing (3.8,3.17)• Red missing (3.64, 4.21)

Kalman Filter
• Introduction – State Space representation
kkk xTxx 1
Velocityxk
k
k
k
k
x
xT
x
x
10
1
1
1

Kalman Filter cont.
kkkk xT
xTxx 2
1 2 wk ux
T
2
2
wkkk uxTxx 1 Velocityxk onAcceleratixk
wkk BuApp 1
vkk DuCps ),0(~ 2ww Nu ),0(~ 2
vv Nu

Kalman Filter cont

Kalman Filter cont

Kalman Filter cont
• Target Models:– Noisy Acceleration model

Kalman Filter cont
• Target Models:– Noisy Jerk model

Kalman Filter cont
• Selection of update time:• T = 1

Kalman Filter cont• b

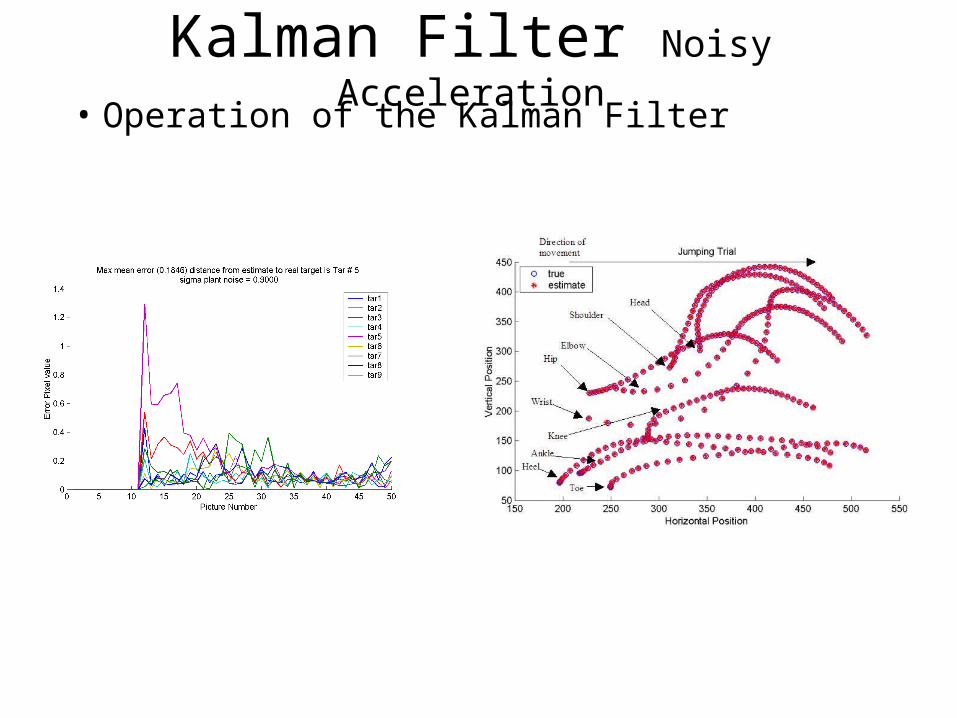
Kalman Filter Noisy Acceleration
• Operation of the Kalman Filter
Kalman Filter Noisy Acceleration
• Operation of the Kalman Filter

Kalman Filter Noisy Acceleration
• Operation of the Kalman Filter

Kalman Filter Noisy Jerk
• Operation of the Kalman Filter

Kalman Filter Noisy Jerk
• Operation of the Kalman Filter

Kalman Filter Noisy Jerk
• Operation of the Kalman Filter
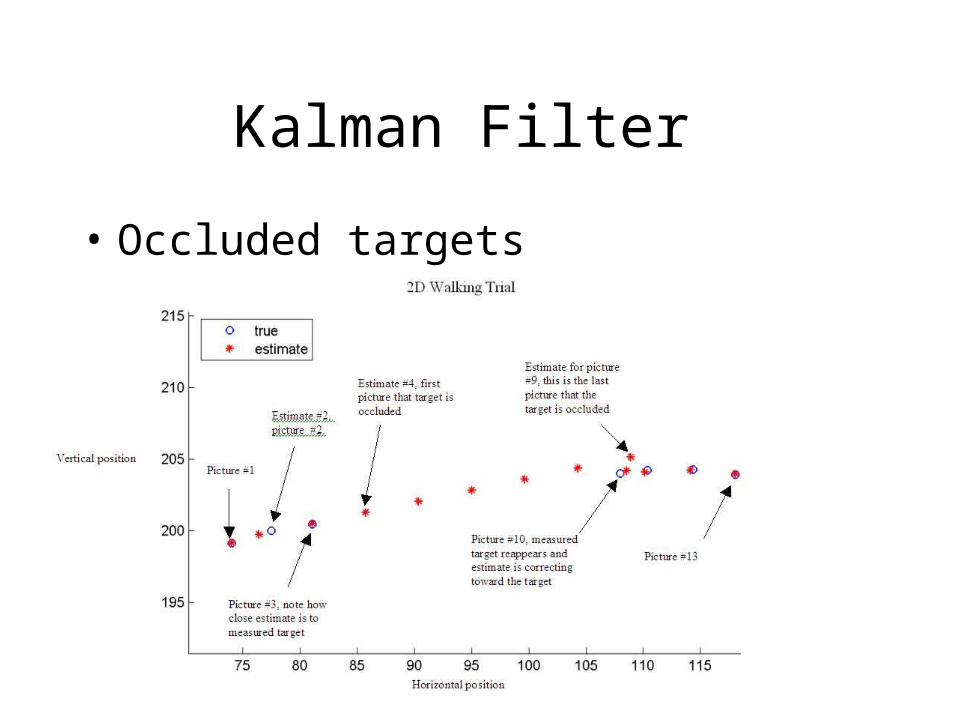
Kalman Filter
• Occluded targets

Target Discrimination
• Introduction– Goal

Target Discrimination
• Example
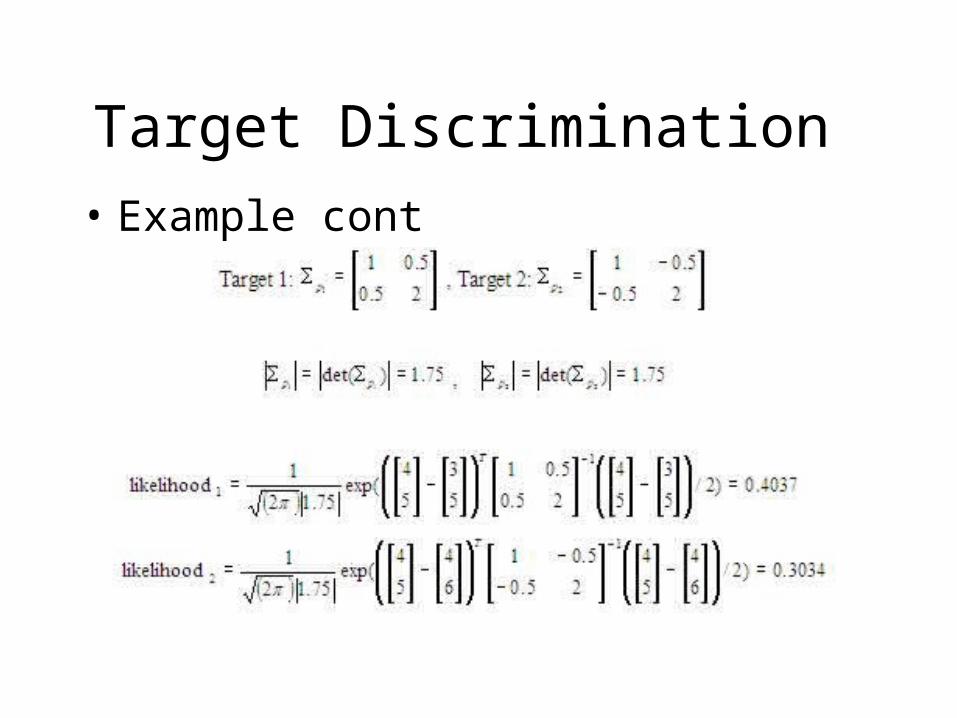
Target Discrimination
• Example cont

Target Discrimination
• Operation of algorithm

Target Discrimination
• Operation of algorithm cont

Target Discrimination
• Operation of algorithm cont
Jumping Trial

Target Discrimination
• Operation of algorithm cont

Conclusion
• Kalman filter– Model
• Discrimination

Future Work
• Hardware implementation
• 3D application
• Other biomechanical target discrimination (segmentation, etc.)
• Other tracking application (space, robotics, etc.)