bus design boot camp 1 chapter 8 differential signaling instructor: howard heck
TRANSCRIPT

1
Bu
s D
esig
n B
oo
t C
amp
Chapter 8
Differential Signaling
Instructor: Howard Heck

2
Bu
s D
esig
n B
oo
t C
amp
Day 1 Introduction – Bus design Overview Falconer 0.25 Transmission Line Fundamentals Leddige 2.0 Digital Timing Analysis Heck 2.0 Crosstalk Falconer 2.0 Non-ideal Interconnect Hall 2.0
Day 2 Connectors, Packages and Vias Mix 2.0 NIRPS, SSO, Power Delivery Hall 2.0 Differential Signaling Heck 2.0 Buffer Modeling Nelson 2.0
Day 3 Introduction to network analysis Hall 2.0 Equalization Overview Heck 2.0 Design Methodology (DOE & PD) Shykind 2.0 High Speed Meas & Validation McCall 2.0
Schedule

3
Bu
s D
esig
n B
oo
t C
amp
Contents
IntroductionCommon and Differential ModesCommon Mode Noise RejectionTerminationTransmitters & ReceiversDifferential Printed Circuit Boards
StructuresLossesCommon Mode Conversion in PCBs
Differential S-ParametersSummaryReferences

4
Bu
s D
esig
n B
oo
t C
amp
Introduction
Differential signaling uses two conductors per signal. The transmitter translates the single input signal into a pair
of outputs that are driven 180° out of phase. The receiver, a differential amplifier, recovers the signal as
the difference in the voltages on the two lines.
The cost of differential signaling seems clear – 2x the # of signal pins (die, package) and PCB traces.
So, why do this? What’s the benefit?
+
-
V(t)
V+(t)
V-(t)
V(t-l/p)
l
Differential PairDifferentialTransmitter
DifferentialReceiver

5
Bu
s D
esig
n B
oo
t C
amp
Differential Signaling Description
Recall from the crosstalk chapter that for a system with 2 signal conductors (& 1 reference conductor) there are 2 modes (even and odd mode).
Treating them as completely isolated, all signals on the lines propagation as a combination of the two modes.
Since the two lines are driven 180° out of phase, the waves will propagate in the odd mode.
HE E
H
Even ModeEven Mode Odd ModeOdd Mode

6
Bu
s D
esig
n B
oo
t C
amp
Differential Signaling Description If the pair is not isolated, signals on the other conductors
will affect the propagation. More modes will exist, and signals will be a combination of all of
those modes.
Noise from those conductors, and from any other sources, can be decomposed into two “modes” – common and differential.
These aren’t actual modes, but they provide a convenient and useful way of looking at the components of the signal.
HE E
H
Even ModeEven Mode Odd ModeOdd Mode

7
Bu
s D
esig
n B
oo
t C
amp
Common and Differential Modes Differential mode signals propagate 180° out of phase. Common mode signals propagate in phase. The receiver is essentially a differential sense amplifier.
The output depends on the difference between the inputs. Since common mode signals are in phase, a purely common
mode signal tends to put the receiver into an unstable state.
The answer to “why differential” lies in understanding how injection of a common mode noise signal on top of a differential signal affects the operation of the receiver.
+
-
+
-

8
Bu
s D
esig
n B
oo
t C
amp
Common Mode Noise Rejection
The signal to be transmitted is represented by voltage, V(t). The two out-of-phase waveforms are defined as:
201
tVVtV
202
tVVtV
[8.1]
[8.2]
where V0 is a constant
Modal decomposition of the the signal pair (see Young, chapters 10 & 11) allows us to analyze coupled lines without explicitly using mutual circuit elements.
odd
evenVV
VV
V
V
V
VV
2
2
2
1
21
21
21
21
12
12
[8.3]

9
Bu
s D
esig
n B
oo
t C
amp
Common Mode Noise Rejection #2
Combing the first three equations:
0
0012 22
222
VtVVtVVtVtV
tVeven
22
222
0012 tVtVVtVVtVtV
tVodd
[8.4]
[8.5]
Veven carries only a DC component, so it generates no noise due to reactive parasitics, or SSO.
Vodd carries a scaled version of the signal.
If lines are tightly coupled (not always the case), then noise from external sources affects both lines as common mode noise.
Transients on the two conductors tend to be self canceling, greatly reducing power supply noise.
Benefit #1Benefit #1
Benefit #2Benefit #2
Benefit #3Benefit #3

10
Bu
s D
esig
n B
oo
t C
amp
Common Mode Noise Rejection #3 In summary, differential signaling offers excellent immunity
to SSO & crosstalk. i.e. the receiver rejects the common mode noise. Even mode picks up the common mode noise. Odd mode remains noise free.
To prove it, we can superimpose common mode noise, Vnoise(t), in the mode voltages at the receiver:
[8.5]
[8.4] tVVttV noiseeven 02
2
p
odd
vltV
ttV

11
Bu
s D
esig
n B
oo
t C
amp
Common Mode Noise Rejection #4 Now translate the voltages back to back to V+ and V-:
[8.6]
[8.7]
22
2
2
0pv
l
noiseoddeven
tVtVVttVttV
ttV
22
0
pnoisev
ltVtV
VttV
22
2
2
0pv
l
noiseoddeven
tVtVVttVttV
ttV
22
0
pnoisev
ltVtV
VttV

12
Bu
s D
esig
n B
oo
t C
amp
Common Mode Noise Rejection #3
The differential receiver detects the signal as the difference between V+ and V- :
[8.8] ttVttVrcv
Vóila! The common mode noise has been removed. In practice, receivers aren’t perfect and some common
mode noise gets through. Differential receivers typically spec a common mode rejection ratio
(CMRR).
22
2
22
2 00pp v
l
noisev
l
noise
rcv
tVtVV
tVtVV
ttVttVttV

13
Bu
s D
esig
n B
oo
t C
amp
Final Thoughts on CM Rejection Breaks in symmetry cause mode conversion between
even and odd modes, which will inject common mode noise onto the signal. Examples: serpentines reference plane changes crosstalk electrical length mismatch
Note that while differential signaling requires 2x the pins, the immunity to SSO noise allows us to reduce the number of power and ground pins in packages, sockets, and connectors. It may also allow us to remove some decoupling.
Finally, realize that the common mode rejection ratio (CMRR) of the receiver will affect performance, too.

14
Bu
s D
esig
n B
oo
t C
amp
Benefit of Differential Signaling
A differential pair shares a common return path, but the common mode noise introduced by the return path is rejected by the differential receiver.
This makes differential signaling much quieter than single ended signaling. Remember Shannon’s theorem: SNR limits performance.
So, differential signaling can operate at much Higher data rates. Must be at >2x to make it worthwhile.
High speed links operating in excess of ~1 Gb/s use differential signaling (e.g. Infiniband, PCI-Express).
In fact, differential signals are already used for high speed clocks in desktop PCs.

15
Bu
s D
esig
n B
oo
t C
amp
Termination of Differential Signals
The goal is to terminate the signals in a resistor network that terminates each mode.
We can use a pi network to terminate both the even and odd modes.
We can again use modal decomposition.
[8.9]
oddeven
oddodd
even
even
odd
even
ZyZy
ZyZyZy
Zy
,02,01
,02,01
,01
,01
21
210
01
1
0
0
The optimum termination will give us even = odd = 0.
01
1
,01
,01
even
even
Zy
Zy
evenZy,0
11
1/y1
1/y1
1/y2
021
21
,02,01
,02,01
oddeven
oddodd
ZyZy
ZyZy
oddeven
oddeven
ZZ
ZZy
,0,0
,0,02 2
[8.10]
[8.11]

16
Bu
s D
esig
n B
oo
t C
amp
Differential Transmitters
Differential signaling typically uses current-mode transmitters. One example is shown here (a source coupled pair).
Features: provides an extremely sharp transient response
because the current switches from 0 to k·Iref over a half volt input swing.
Draws constant current from the supply, which reduces the AC component of power supply noise.
The source voltage, VS, is stable, reducing the turn-on transient that results with a switched current-source configuration.
Other options include using a cascode current mirror to reduce the output capacitance.
Irefin in
lineline
Vs
17
Bu
s D
esig
n B
oo
t C
amp
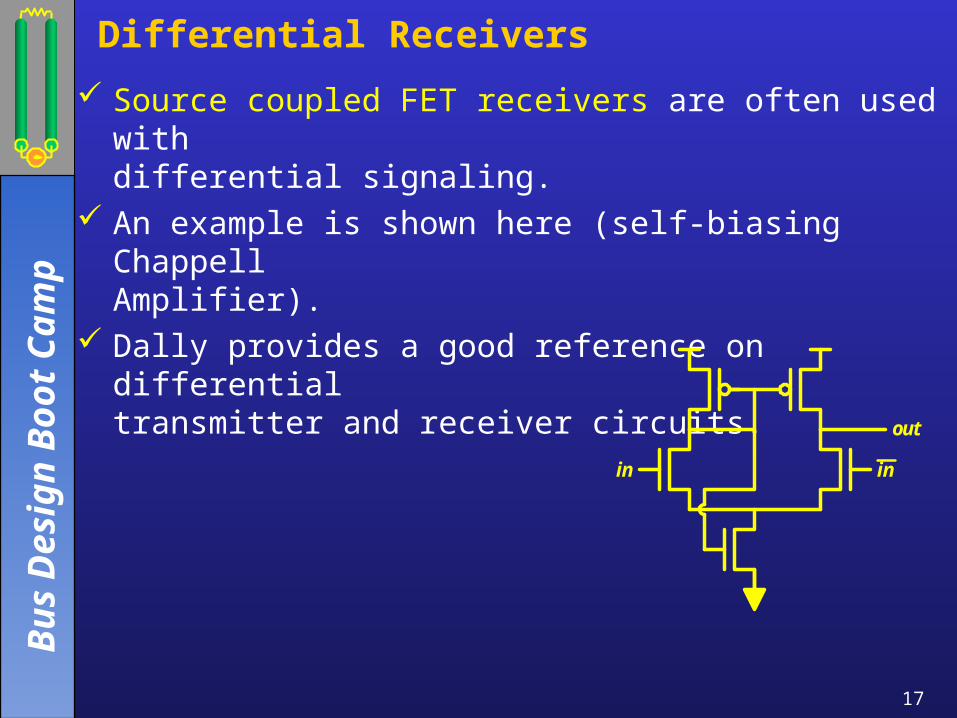
Differential Receivers
Source coupled FET receivers are often used with differential signaling.
An example is shown here (self-biasing Chappell Amplifier).
Dally provides a good reference on differential transmitter and receiver circuits.
in in
out

18
Bu
s D
esig
n B
oo
t C
amp
Differential PCBs It is possible to implement tightly
coupled differential interconnects, e.g. using twisted pair wires. Coupling is 99.9%
It is not practical to do so in a PCB: Typical coupling for differential
traces is 20-50%. This is OK, as long as the traces
are symmetrical. Routing with minimum spacing
is OK, but must be maintainedor we’ll get an impedance discontinuity.
Trace lengths must be matched, or common mode current will be generated. The amount of current imbalance can be expressed as:
0.010"
0.038"
r=2.5
AWG 24 Wire
5
5
52
4.5
2.5
r=4.2
r=4.2
56,0 quietZ 872 ,0,0 odddiff ZZ
diffr
d It
l
Imbalance [8.12]

19
Bu
s D
esig
n B
oo
t C
amp
Differential PCBs #2 Differential impedance is defined as:
Differential impedance control in HVM PCBs is typically 15-20%. Versus single ended impedance (10-15%). Strongly influenced by the etch profile (W1, W2).
Skin effect will show up differently than with single ended lines.
odddiff ZZ ,0,0 2 [8.13]
w1
st
h1
h2
r1
r2
w2

20
Bu
s D
esig
n B
oo
t C
amp
Current Distribution & Differential Losses For coupled differential
lines, the virtual ground will pull the current to the edges.
Current flows in a smaller area, which increases resistance.
t
W E
Virtual Ground
For very narrow spacing, the current area will asymptote to t·skin .
For very wide spacing, the current area will asymptote to W·skin .
Narrow Spacing Intermediate Spacing Wide Spacing

21
Bu
s D
esig
n B
oo
t C
amp
Current Distribution and Differential Losses
Ports are matched to Zdiff.
Current distributions effect the loss.
Evidence of a minimum loss “sweet spot”.
2
5
4.5
Vary
Zdiff variesZdiffZodd
1 2
Differential Single LineTransitional
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
1 10 100 1000Spacing [mils]
Lo
ss (
1-|S
21|)
5 GHz
10 GHz

22
Bu
s D
esig
n B
oo
t C
amp
Phenomenon:Phenomenon: Differential pairs see variation in effective dielectric constant due to local non-uniformity.
D+D+
D-D-r = 3.5
FR4 Glass Cloth w/ FR4 Glass Cloth w/ Differential SignalsDifferential Signals
r = 3.3
D+D+ D-D-
Glass Epoxy
10 mils10 mils
16.7 mils16.7 mils
Glass
Root CauseRoot Cause: Different dielectric constants (r): glass ~ 6, epoxy ~ 3A line routed over a glass
bundle travels more slowly due to the higher r (& vice versa).
Converts differential signals to common mode thru electrical length mismatch caused by the r difference.
Common Mode Conversion in PCBs

23
Bu
s D
esig
n B
oo
t C
amp
Transmitter ReceiverD+
D-
Vdiff = D+D-
V
-V
0
V
-V
0Vcomm = D+ + D
2
V
-V
0
V
-V
0
MechanismMechanism
Differential phase skew degrades voltage & Differential phase skew degrades voltage & timing margins.timing margins.
Common Mode Conversion in PCBs #2

24
Bu
s D
esig
n B
oo
t C
amp
Impact:Impact: Max data rate degradation.Noise , SNR .
0.00
0.05
0.10
0.15
0.20
0.25
0 5 10 15Length [in]
% V
olt
age
No
ise 5 Gb/s
10 Gb/s
0
40
80
120
160
200
0 5 10 15Length [in]
Tim
ing
No
ise
[ps]
5 Gb/s
10 Gb/s
In the plots, In the plots, r1,effr1,eff = 3.3 and = 3.3 and r2,effr2,eff = 3.5. = 3.5.
Mode Conversion in PCBs #3
DDjzjzz
DM
CMnoise
eee
zV
lzVzV
2
1
0,%
0
,
ceffr where
bitcellnoisenoise tzVzt ,%,
= 1 dB/inr,effr,eff (D+) = 3.3(D+) = 3.3
r,eff r,eff (D-) = 3.5(D-) = 3.5
~15 ps/inPhase skew
1st order model:

25
Bu
s D
esig
n B
oo
t C
amp
Example 1:Balanced Ckt/Length Skew Ckt
Circuit: 3 differential pairs. 12” traces with 5 mil space
between all traces. Terminated in Zodd at both
ends. 16.67 mA current source
transmitter. Only the middle pairs driven. Results are plotted for D2 &
D2. In the skewed case, D2 is
0.1” longer than D2.
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.0 0.5 1.0 1.5 2.0 2.5 3.0
time [ns]
vo
lta
ge
[V
] V(Tx)
V(Rx)
Vbar(Tx)
Vbar(Rx)
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.0 0.5 1.0 1.5 2.0 2.5 3.0
time [ns]
vo
lta
ge
[V
] V(Tx)V(Rx)Vbar(Tx)Vbar(Rx)
Balanced
Skewed
55
55
55
55
55
5
D1 D1 D2 D2 D3 D3

26
Bu
s D
esig
n B
oo
t C
amp
0.00
0.05
0.10
0.15
0.20
0.25
0.30
1.4 1.5 1.6 1.7 1.8
time [ns]
Vco
mm
[V
]
Balanced - RxSkewed Rx
-0.50
-0.40
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
1.4 1.5 1.6 1.7 1.8
time [ns]
Vdi
ff [
V]
Balanced - RxSkewed - Rx
Example 1:Balanced Ckt/Length Skew CktHere are the common mode and differential mode waveforms at the receiver.
Common Mode
Differential Mode

27
Bu
s D
esig
n B
oo
t C
amp 0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
1.4 1.5 1.6 1.7 1.8
time [ns]
Vco
mm
[V
]
Balanced - RxCase1 - RxCase 2 - Rx
Example 2: CrosstalkSame 3 differential pairs
Trace Case 1 Case 2
D1 Quiet Quiet
D1bar Quiet Quiet
D2 LH LH
D2bar HL HL
D3 HL LH
D3bar LH HL
Common Mode
Differential Mode
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.0 0.5 1.0 1.5 2.0 2.5 3.0
time [ns]
vo
lta
ge
[V
] V(Tx)V(Rx)Vbar(Tx)Vbar(Rx)
Case 1
-0.50
-0.40
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
1.4 1.5 1.6 1.7 1.8
time [ns]
Vdi
ff [
V]
Balanced - RxXtalk1 RxXtalk2 Rx

28
Bu
s D
esig
n B
oo
t C
amp
Differential S-Parameters
Differential S-Parameters are derived from a 4-port measurement.
Traditional 4-port measurements are taken by driving each port, and recording the response at all other ports while terminated in 50.
Although, it is perfectly adequate to describe a differential pair with 4-port single ended s-parameters, it is more useful to convert to a multi-mode port.
4 Port
1
3
b1a3
b3
b2a4
b4
4
3
2
1
44434241
34333231
24232221
14131211
4
3
2
1
a
a
a
a
SSSS
SSSS
SSSS
SSSS
b
b
b
b

29
Bu
s D
esig
n B
oo
t C
amp
Multi-Mode S-Parameters
Matrix assumes differential and common mode stimulus.
Specify the differential S-parameters in terms of differential and common mode responses.Differential stimulus, differential responseCommon mode stimulus, common mode responseDifferential stimulus, common mode response (aka ACCM Noise)Common mode stimulus, differential response
This can be done either by driving the network with differential and common mode stimulus, or by converting the traditional 4-port s-matrix.Converting the s-matrix alLs the use of the 4-port VNA.
2
1
2
1
44434241
34333231
24232221
14131211
2
1
2
1
cm
cm
dm
dm
cccccdcd
cccccdcd
dcdcdddd
dcdcdddd
cm
cm
dm
dm
a
a
a
a
SSSS
SSSS
SSSS
SSSS
b
b
b
b
4 Port
1
3
bdm1acm1
bcm1
bdm2acm2
bcm2
adm1adm2

30
Bu
s D
esig
n B
oo
t C
amp
Conversion to Multi-Mode S-Parameters Converting the S-parameters into the
multi-mode is a matter of performing some algebra.
Example: Differential return loss, Sdd11:
The stimulus is equal, but opposite: 13 aa 24 aa
2 Port
1
3
b1a3
b3
b2a4
b4
031
31
0;01
111
422
aaaadm
dmdd aa
bb
a
bS
cmdm
4143132121111 aSaSaSaSb
4343332321313 aSaSaSaSb
)()()()( 3414433133321223111131 SSaSSaSSaSSabb
For a symmetrical network: 3412 SS 1432 SS &
1
3414233131321223111111 2
)()()()(
a
SSaSSaSSaSSaSdd
1
3414233131321223111111 2
)()()()(
a
SSaSSaSSaSSaSdd
Also use: 13 aa
24 aa
)(2
13313311111 SSSSSdd
&
[8.15]
[8.16]

31
Bu
s D
esig
n B
oo
t C
amp
Advantages/Disadvantages of Multi-Mode Matrix
Advantages: Describes 4-port network in terms of 4 two port matrices.
Differential Common mode Differential to common mode Common mode to differential
Easier to relate to system specifications. ACCM noise, differential impedance
Disadvantages: Must convert from measured 4-port scattering matrix.

32
Bu
s D
esig
n B
oo
t C
amp
Summary
Differential signaling offers much higher performance by minimizing common mode noise.
Differential transmitters and receivers typically operate in current mode.
Differential PCB traces must be symmetric to minimize the generation of common mode current.Ditto for packages, connectors, and sockets.

33
Bu
s D
esig
n B
oo
t C
amp
References
S. Hall, G. Hall, and J. McCall, High Speed Digital System Design, John Wiley & Sons, Inc. (Wiley Interscience), 2000, 1st edition.
W. Dally and J. Poulton, Digital Systems Engineering, Cambridge University Press, 1998.
B. Young, Digital Signal Integrity, Prentice-Hall PTR, 2001, 1st edition.
Tektronix, Inc., “Differential Oscilloscope Measurements,” Application Note 51W-10540-1, July 1996.
E. Bogatin, M. Resso, “Differential Impedance Measurement With Time Domain Reflectometry,” Agilent Technologies Application Note 1382-5, May 9, 2002

34
Bu
s D
esig
n B
oo
t C
amp
Appendix: Low & High Frequency Losses Some additional details

35
Bu
s D
esig
n B
oo
t C
amp
Differential Microstrip Losses
y = -1E-09x - 1.1925
R2 = 0.9992
y = -5E-10x - 1.2079R2 = 0.9953
-25
-20
-15
-10
-5
0
0 5 10 15 20 25Frequency, GHz
Lo
ss,
dB
tan=0.01
tan=0.03
The plot shows strip losses as a function of frequency and loss tangent assuming smooth conductor (5/5/5).
This indicates that dielectric losses dominate beyond 2.5 GHz to 4 GHz. (i.e. scale linearly with frequency)

36
Bu
s D
esig
n B
oo
t C
amp
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Frequency [GHz]
Lo
ss [
dB
]
Low Frequency Loss in Differential strips
Low frequency losses are greater for narrowly spaced differential microstrips.
Model predicts that loss curves for wide and narrow spaces intersect at: 700MHz when tan=0.03, 3 GHz when tan=0.01
W 5 mils
r 4.2
h 4.5 mils
tan 0.03
Zodd 50± 5
W/S/W=5/15/5
W/S/W=5/5/5 Curves Intersect

37
Bu
s D
esig
n B
oo
t C
amp
High Frequency Loss in Differential strips
Model predicts losses that high frequencies increase with for wide spacing. Worse high values of tan. Why?
W 5 mils
r 4.2
h 4.5 mils
tan 0.03
Zodd 50± 5
-30
-25
-20
-15
-10
-5
0
0 5 10 15 20 25Frequency
loss
[d
B]
w=5, s=5w=5, s=10w=5, s=15w=5, s=20

38
Bu
s D
esig
n B
oo
t C
amp
Differential Microstrip Loss Mechanism Conductor losses increase due to skin effect & proximity effect. In absence of dielectric losses, narrow spacing will produce higher
losses due to proximity effect – area of current flow determines losses (approx. f0.5 behavior).
Dielectric losses increase due to damped response of electric dipoles as a function of the frequency of applied oscillating electric field. Dielectric loss increases linearly w/ freq. (assuming homogeneous media).
Why does narrow spacing have the highest losses at low frequencies but the lowest loss at high frequencies? At low frequencies, tan losses are small and losses are dominated by skin and proximity effects.
• Narrow spacing = smaller area for current = high loss At high frequencies, tan losses dominate.
• Smaller spacing leads to more E-fields fringing through the air and less through the lossy dielectric.
Narrow Spacing Wide SpacingCurrent Distribution
E-Fields

39
Bu
s D
esig
n B
oo
t C
amp
High Frequency Loss in Differential Striplines
Narrow spacing remains the highest loss configuration in a stripline at all frequencies.
Since the dielectric media is homogeneous, all the fields are contained within the lossy material.
With no fields fringing into a loss-free dielectric (air), the only conductor losses are affected by spacing.
W 5 mils
r 4.2
B 18 mils
tan 0.03
Zodd 50± 5
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
0 5 10 15 20frequency
loss
, dB
5-5strip,.035-10strip,.035-15strip,.035-20strip,.03