building a cognitive system by gnosys
DESCRIPTION
BUILDING A COGNITIVE SYSTEM BY GNOSYS. Co-ordinator: John Taylor (KCL) Asst Co-Ordinator: Stathis Kasderidis (FORTH) EC PO: George Stork Start date: Oct 1; Kick-off Oct 20/21 [email protected] Web-site: http://www.ics.forth.gr/gnosys/ Department of Mathematics King’s College London, UK - PowerPoint PPT PresentationTRANSCRIPT

BUILDING A COGNITIVE SYSTEM BY GNOSYS
Co-ordinator: John Taylor (KCL) Asst Co-Ordinator: Stathis Kasderidis (FORTH)
EC PO: George StorkStart date: Oct 1; Kick-off Oct 20/21
[email protected]: http://www.ics.forth.gr/gnosys/
Department of Mathematics King’s College London, UK
emails: [email protected]

CONTENTS
1. Vision of GNOSYS
2. GNOSYS Partners
3. GNOSYS Prototypes
4. GNOSYS Tasks/Milestones
5. GNOSYS Summary

1. VISION OF GNOSYS
1) Embodied cognition (wheel-robot + gripper)2) Create concepts/rewarded-goals under
attention control3) Learns goal-directed tasks4) Learns novel environments5) Reasoning by forward models6) Guidance from brain (animal/infant/adult)7) Various memory types
(STM/LTM/associative/error-based)8) Interdisciplinary: Comp vision/ Cog NSci/
Neural Networks/ Robotics/ AI/ Maths
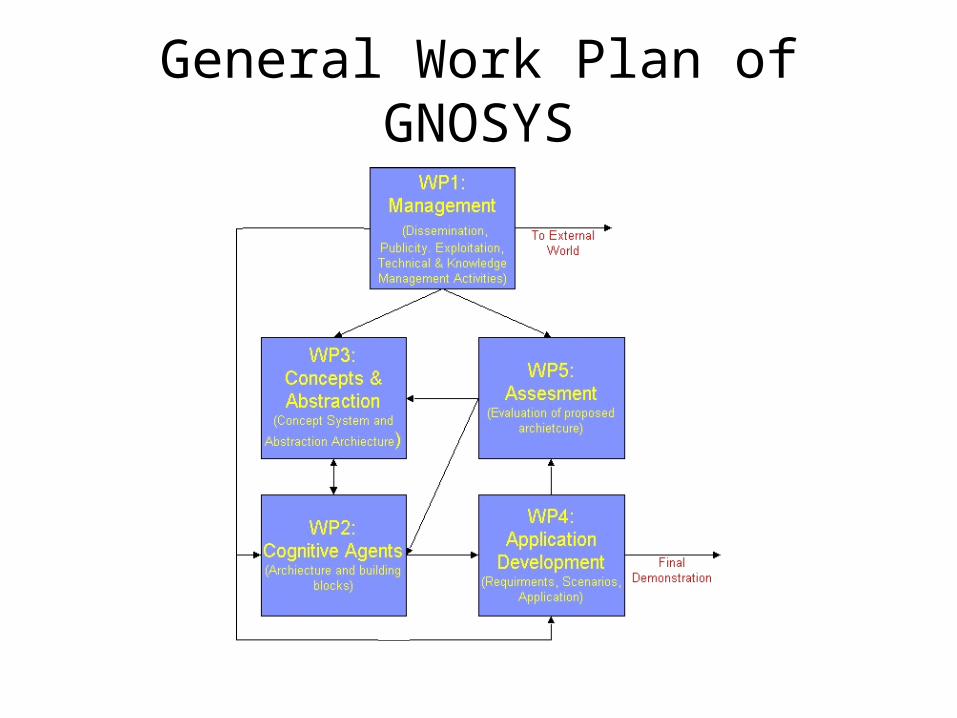
General Work Plan of GNOSYS

GNOSYS Cognitive Powers
• Feature-based perception (M1-16) WP2• Concepts/Goals/Attention (Sensory & Motor)
(M6-18, 12-24) WP2/WP3• Rewarded drive-based learning (M12-24) WP2• Goal-based Global Computation (M6-18) WP2• Abstraction Hierarchy (M12-24) WP3• Reasoning/Action Planning by motor
attention-base forward models(M18-33) WP3• Robot Platforms @ 2 levels (M18/M30)

HOW GNOSYS WORKS
v v
│ ↔ │
│ ↔ │
│ ↔ │
│ ↔ │
│ ↔ │
ANN Adaptive Stream(Concepts/Goals/Attention/Rewards/Values/ForwardModelslearnt as NNpredictors)
Symbolic Control Threads(5 components)
Linguistic Connections(Words/Fuzzy rules/ Symbolisation)
: Relate to COSPAR

Drives/Motivation/Rewards
• Assign values (in AMYG/OBFC) as direct input (learnt), or by ‘DA’ modulation from primary rewards (satisfying basic drives)
• Basic drives for GNOSYS:
Energy level/ Curiosity/ Stimulation/ Minimum pain (touch/pressure)/ Approbation/ Motor activity
• Use value maps --> assign value to stimuli

2. GNOSYS PARTNERS1 King’s College London (KCL) Comp Nsci Grp:
NNs, concepts, attn control 2 ZENON S.A., Greece (ZENON): robots3 Foundation of Research & Technology - Hellas
Greece (FORTH): global comput/robots4 Eberhard-Karls-Universität, Tübingen,
Germany (UTUB): perception/reward/robots5 Università di Genova, Dipartimento di
Informatica, Sistemistica, Telematica, Italy (UGDIST): motor control/robots
-> RobotCub

Attentional Agent Architect (EC FP5: DC, 2001-2003)
• Distributed entity with four layers (attentional multi-level agent):– L1: Sensors
– L2: Pre-processing
– L3: Local decision
– L4: Global decision

GLOBAL CONTROL ARCHITECTURE• EXTENDED ATTENTION V EMOTION
ARCHITECTURE (EC ERMIS, NF, 2002-4; BBSRC: 2004-7):
(extended Corbetta & Shulman, 2002)
InhibitoryInteraction through ACG:
Excitatoryinteraction
Excitatory
Excitatory/Inhibitory
Inhibition from DLPFCIn emotion recognition
Endogenousgoals
Exogenous goals

MOTOR CORTEX ACTION NETWORK (NT, MH, OM & JGT) (in NetSim for sequence learning; tested in PDs: J NSci24:702 )
MOTOR CORTEX
GLOBUS PALLIDUSEXTERNAL
GLOBUS PALLIDUSINTERNAL
NUCLEUS RETICULARISTHALMUS
SUBSTANTIA NIGRAPARS COMPACTA
CENTROMEDIANPARAFISCULAR NUCLEUS
SUBSTANTIA NIGRAPARS RETICULARIS
SUB-THALAMIC NUCLEUS
GLUTAMATERGIC INPUT
GABAERGIC INPUT
DOPAMINERGIC INPUT
SIMILAR STRUCTURES MODEL OBFC, DLPFC, ACG AND VLPFC
FROM OTHER CORTEX + OTHER
THALAMUS
FROM CEREBELLUM
TO OTHER CORTEX
THALAMUS
STRIATUM

Cerebellar Structure& Associated Regions: For Insertions,by error-based learning (with teacher)
BK
PONS
GrC
GoC
PK
IO
DCN+DCN-
GrC granule cellsGoC golgi cellsBK basket cellsPK purkinje cells
DCN deep cerebellar nuclei (excit. & inhib.)
IO inferior olivePONS pontine nucleiHIPP hippocampal regionsPFC pre-frontal cortex
inhibitory conns.excitatory conns.
HIPP
PFC

HIPPOCAMPUS & AMYGDALA (in NetSim for sequence learning, and x20 speed-up in SWS) (MH, NT & JGT): as teacher

EPSRC: Ventral & Dorsal Concept Learning (-> GNOSYS)
Ventral pathway
V1
V2
V4TEO
TE
LGN Input
Dorsal pathway
V1
V5
LIP
LGN Input
Learning
Hard-wired
Currently Hard-wired

Architecture Details: Percepts• V1: 4 excitatory & inhibitory layers for bar
orientations, hardwired (14*14)
• V2 (28*28) trained on reduced set of pairs of bars (6), # start positions in retina 121
• V4 (28*28)->TEO (28*28/14*14)->TE (7*7) trained on 2 different triangles (121 start positions)
• Now by cluster computing• Next step: to DL/VLPFC as goals-> attention
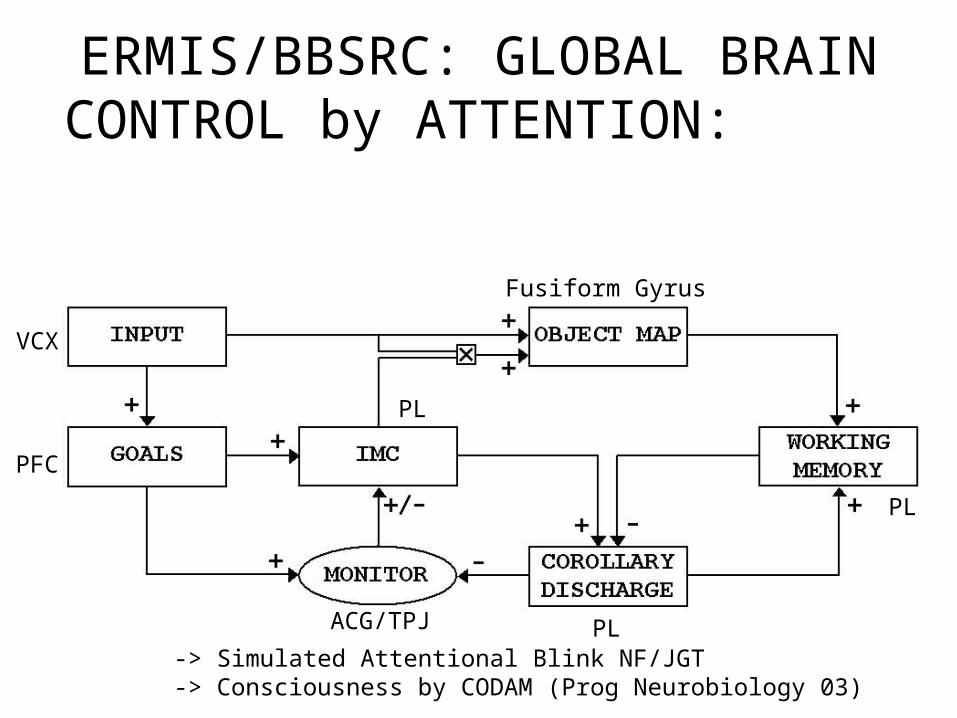
ERMIS/BBSRC: GLOBAL BRAIN CONTROL by ATTENTION:
Fusiform Gyrus
PFC
ACG/TPJ
PL
PL
VCX
PL-> Simulated Attentional Blink NF/JGT-> Consciousness by CODAM (Prog Neurobiology 03)

Model of Visuo-Motor Attention Control System
(JGT + NF, IJCNN’03)
-> MACS for Attention filtering
->MINDRACESfor anticipation

AB extended by AMYG as bias: ERPs for T2 in Lag3 when no
amygdala

ERPs for T2 in Lag3: amygdala input from T2’s
object rep, & fed back to same site

Tsuji T, Tanaka Y, Morasso P, Sanguineti V. Kaneko M (2002) IEEE Trans SMC-C, 32, 426-439.Morasso P, Sanguineti V, Spada G (1997) Neurocomputing, 15, 411-434
UGDIST: Biomimetic trajectory formation via artificial potential fields
… the importance of smoothness and continuity …

Khepera: the artificial bodyThe in-vitro brain
From the Neurobit project
Real-time control of robot motion by sub-symbolic neural activity
… the importance of bidirectional communication …

… the importance of softness and a soft touch …
Robotized haptic interface

Computational Vision and Robotics Lab (CVRL)
Institute of Computer Science
Foundation for Research andTechnology – Hellas
(FORTH)

CVRL - FORTH
• Mission: Study the mechanisms involved in the development of autonomous robotic systems
Cognition Action
LearningPerception
SystemArchitecture
Right sub-network
Left sub-network
S.O. n-1
A
B
M
A
B
C
M
C
Right sub-network
Left sub-network
A
B
M
A
B
C
M
C
Right sub-network
Left sub-network
A
B
M
A
B
C
M
C
BS-L
BS-R
S.O. n S.O. n+1

• Current R&D activities – perceptual competences based on visual and range sensors and sensor
fusion techniques– coupling of perception and action – autonomous navigation and control of complex robotic systems– development of networked robotic systems– content-based retrieval of images and video
• Future activities– development of robotic behaviours that simulate corresponding behaviours
of living organisms– emergence of cognition in artificial systems– complex heterogeneous robotic systems involving multiple robots
CVRL - FORTH

UTUB Experienced in robot movement
and planning Involved in GNOSYS perceptions &
rewards
ZENONRobotics Company in Athens
Experienced in robot applicationsTo construct robot platforms (2)

3. GNOSYS PROTOTYPES
• PROTOTYPE I (M18): Attn control of sensory inputs & response
• Learn concepts of simple shapes [3] & rewarded actions, under attention
• Responses to commands/learn new goals as new actions on new objects
• PROTOTYPE 2 (M28): As above but more complex objects [3] + sequences of action/object pairs in real scenes + forward models for virtual goal seeking (reasoning)
4. GNOSYS TASKS, etc: Reasoning Domains/Environments
(WP2&3)• Three levels of environment• Level 1: Learn shapes/colours; move &
touch; move & pick up; [2] & [3]-D objects• Powers: Concept/Attn/Goals as actions on
objects/Valence of objects in environment• Level 2: Complex objects & actions• Powers: ibid/manipulate to achieve goals• Level 3: Hierarchy of objects; run virtual
object/action sequences to achieve goals• Powers: Reasoning/ novel objects/actions
Application to Patrolling, etc
• Construct loc/action and object/action map in patrol environment
• Reasoning tasks: to discover actions: (loc1, action)→loc2, (obj1,action)→obj2
• Meets barrier of boxes. Reasoning: move box to pass through, instead of moving round barrier
• Over pond: reasoning: find plank to put across pond
• Plus many psychological tasks (WCST/Tower of London, etc, etc)

MILESTONES
• Level 1: Simple actions & stimuli [2] (M6)
• Level 2: More complex actions & stimuli [3]/colour/motion/audition/touch (M16)
• Level3: Real-world stimuli (M24)
• Prototype 1 (M18)
• Prototype 2 (M28)
• Assessment (M34)

5. GNOSYS SUMMARY
• Create concepts/goals by learning
• Can handle novel environments
• Embodied cognitive system
• Learning by infant-style development (by hierarchy of modules sequentially coming on line)
• Reasoning by forward models created by reward-based learning