build xt gripper for rq-robot
DESCRIPTION
ขั้นตอนการสร้าง XT Gripper และการนำไปเชื่อมต่อกับโครงสร้างของ RQ-ROBOT พร้อมทั้งการติดตั้งโมดูลวัดระยะทาง HC-SR04TRANSCRIPT

แขนจับด้านซ้าย x 1
สกรู 3x20 มม. x5 สกรูขนาด 3x15มม. x7
นอต 3 มม. x25
นอตแกนพลาสติก 3 มม. x1
แป้นยึดเซอร์ โวมาตรฐาน x1
แป้นยึดเซอร์ โวเฟืองโลหะ x1
สกรูขันเซอร์ โวเฟืองโลหะ x1
นอตพลาสติก 3 มม.x1
สกรูเกลียวปล่อย 2 มม. x 4
สกรูขนาด 3x10 มม. x 8
ปลายแขนจับสั้น x 2แขนยก x 1
แขนจับด้านขวา x 1ปลายแขนจับยาว x2
ขายึดเซอร์ โวมอเตอร์ (จับ) ตัวบน x1
ขายึดเซอร์ โวมอเตอร์ (จับ) ตัวล่าง x 1
35 มม.20 มม. 15 มม.
10 มม.
รายการอุปกรณ์
1
ข้ันตอนการสร้าง Gripper สำาหรับ RQ-ROBOT
เสารองพลาสติก 10 มม.x16
เสารองพลาสติก 3 มม.x2
สกรูขนาด 3x35มม. x8
เซอร์ โวมาตรฐาน x 1 เซอร์ โวเฟืองโลหะ x 1 เทปโฟม
ฉากโลหะ 2x3 รู x2

ขั้นตอนการประกอบชุดแขนจับ
(1) นำ�แขนยกยึดกับแป้นยึดเซอร์โวเฟืองโลหะ และแขนจับด้�นขว�ยึดเข้�กับแป้นยึดเซอร์โวม�ตรฐ�น ใช้สกรูเกลียวปล่อย 2 มม.ขันยึด
แขนยก
ขายึดเซอร์ โวตัวล่าง
เสารอง 10 มม.
(2) นำ�ข�ยึดเซอร์โวมอเตอร์ตัวล่�งยึดเข้�กับเซอร์โวมอเตอร์ม�ตรฐ�น โดยใช้สกรู 3x10 มม. และนอต 3 มม. ขันยึด
(3) นำ�แขนจับด้�นขว�ยึดเข้�กับปล�ยแขนจับย�วและปล�ยแขนจับสั้น คั่นด้วยเส�รอง 10 มม.ช่องละ 2 ตัว โดยใช้สกรู 3x35 มม. และขัน
ยึดด้วยนอต 3 มม.
2
แขนจับด้านขวา
แป้นยึดเซอร์ โวเฟืองโลหะ
แป้นยึดเซอร์ โวมาตรฐาน
นอตพลาสติกนอตแกนพลาสติก
สกรูยึดเซอร์ โวมอเตอร์
สกรู 3x20 มม.
เสารองพลาสติก 3 มม.
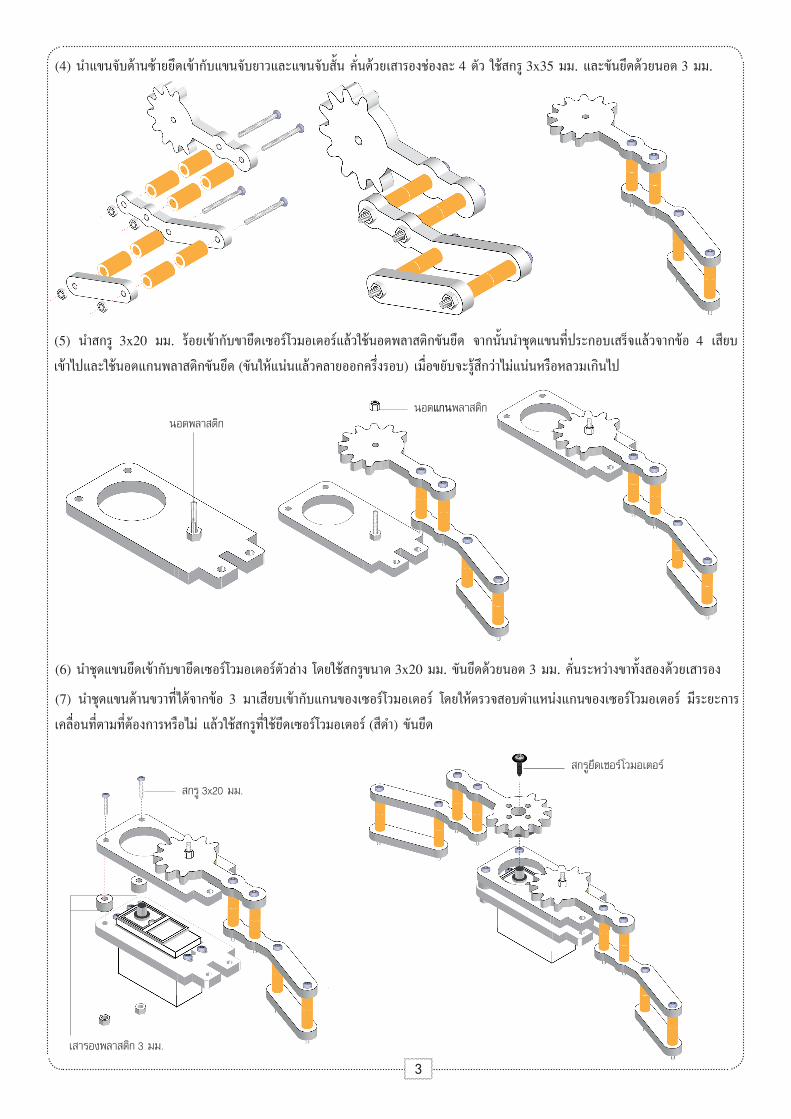
(4) นำ�แขนจับด้�นซ้�ยยึดเข้�กับแขนจับย�วและแขนจับสั้น คั่นด้วยเส�รองช่องละ 4 ตัว ใช้สกรู 3x35 มม. และขันยึดด้วยนอต 3 มม.
(5) นำ�สกรู 3x20 มม. ร้อยเข้�กับข�ยึดเซอร์โวมอเตอร์แล้วใช้นอตพล�สติกขันยึด จ�กนั้นนำ�ชุดแขนที่ประกอบเสร็จแล้วจ�กข้อ 4 เสียบ
เข้�ไปและใช้นอตแกนพล�สติกขันยึด (ขันให้แน่นแล้วคล�ยออกครึ่งรอบ) เมื่อขยับจะรู้สึกว่�ไม่แน่นหรือหลวมเกินไป
(6) นำ�ชุดแขนยึดเข้�กับข�ยึดเซอร์โวมอเตอร์ตัวล่�ง โดยใช้สกรูขน�ด 3x20 มม. ขันยึดด้วยนอต 3 มม. คั่นระหว่�งข�ทั้งสองด้วยเส�รอง
(7) นำ�ชุดแขนด้�นขว�ที่ได้จ�กข้อ 3 ม�เสียบเข้�กับแกนของเซอร์โวมอเตอร์ โดยให้ตรวจสอบตำ�แหน่งแกนของเซอร์โวมอเตอร์ มีระยะก�ร
เคลื่อนที่ต�มที่ต้องก�รหรือไม่ แล้วใช้สกรูที่ใช้ยึดเซอร์โวมอเตอร์ (สีดำ�) ขันยึด
3

(8) นำ�แขนยกม�ยึดเข้�กับด้�นข้�งของชุดมือจับ โดยเสียบเข้�ไปที่ร่องในตำ�แหน่งดังรูป เมื่อเสียบแล้วให้ใช้สกรูขน�ด 3x20 มม. ร้อยเข้�ที่รู
ที่ยื่นออกม� จ�กนั้นใช้นอต 3 มม.ขันยึดให้แน่น
สกรู 3x20 มม.
1
2
นอต 3 มม.
(9) สำ�หรับเซอร์โวมอเตอร์เฟืองโลหะ ให้นำ�ฉ�กโลหะ 2x3 รู ม�ยึดเข้�ไปในตำ�แหน่งดังรูป โดยใช้สกรูขน�ด 3x6 มม.ขันยึดด้วยนอต 3 มม.
4
(10) นำ�แผ่นโฟมติดที่ส่วนปล�ยแขนต่�ง ๆ เพื่อให้ส�ม�รถหนีบจับอุปกรณ์สิ่งของต่�งๆ ได้แน่นขึ้น

5
(11) นำ�ชุดแขน Gripper ยึดเข้�กับเซอร์โวมอเตอร์เฟืองโลหะ โดยให้สังเกตระยะก�รยกขึ้นลงของแขน ก่อนเสียบแกนเข้� ก่อนใช้สกรูขัน
ยึดให้แน่น
สกรูขันยึดแกนเซอร์ โว
(12) นำ�ชุดแขนจับเซอร์โวติดตั้งที่หุ่นยนต์ RQ-ROBOT ในตำ�แหน่งดังรูป แล้วใช้สกรู 3x6 มม. ขันยึดที่ตำ�แหน่งของฉ�กโลหะ (ขันยึด
เพียง 3 ตัว)
(13) เสียบส�ยเซอร์โวมอเตอร์สำ�หรับคีบไว้ที่ตำ�แหน่ง SV7 และสำ�หรับยกไว้ที่ตำ�แหน่ง SV8 โดยให้สังเกตทิศท�งของส�ยให้ถูกต้องด้วย ดัง
รูป
เซอร์ โวมาตรฐาน
ดำา (G) กราวด์
น้ำาตาล (G) กราวด์
แดง (+) ไฟบวก
แดง (+) ไฟบวก
ขาว (S) สัญญาณ
ส้ม (S) สัญญาณเซอร์ โวเฟืองโลหะ
6
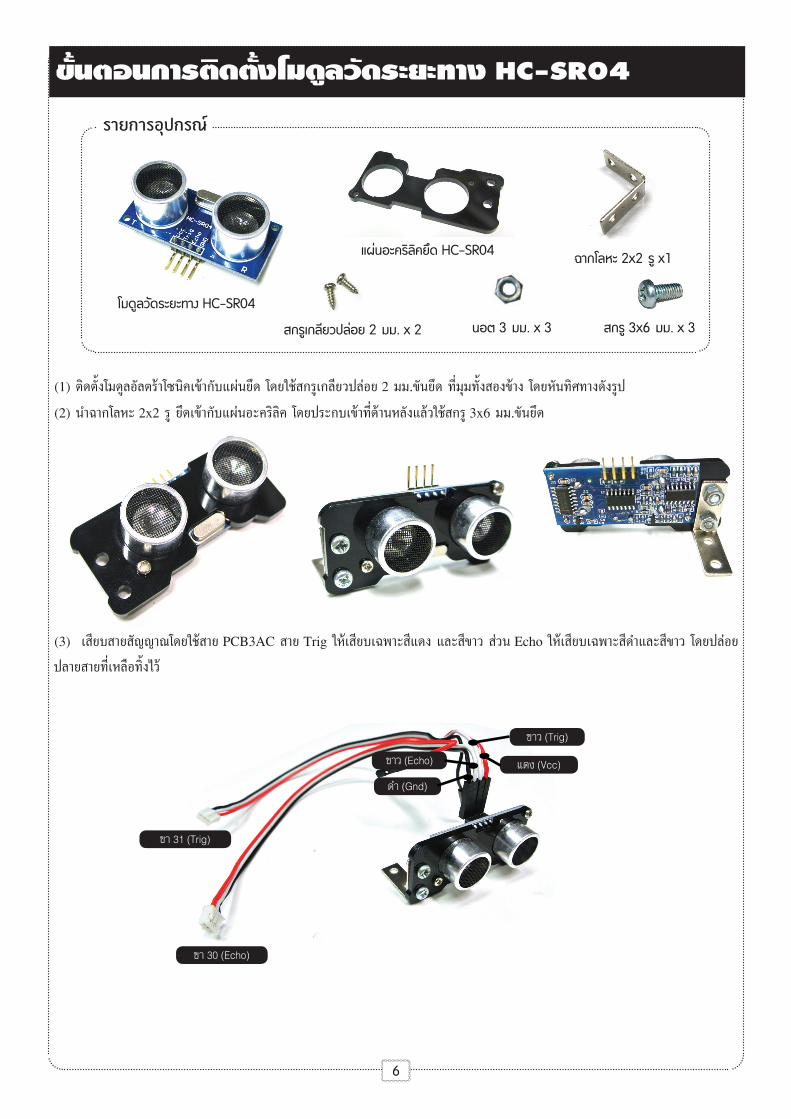
(1) ติดตั้งโมดูลอัลตร้�โซนิคเข้�กับแผ่นยึด โดยใช้สกรูเกลียวปล่อย 2 มม.ขันยึด ที่มุมทั้งสองข้�ง โดยหันทิศท�งดังรูป
(2) นำ�ฉ�กโลหะ 2x2 รู ยึดเข้�กับแผ่นอะคริลิค โดยประกบเข้�ที่ด้�นหลังแล้วใช้สกรู 3x6 มม.ขันยึด
ข้ันตอนการติดต้ังโมดูลวัดระยะทาง HC-SR04
รายการอุปกรณ์
ฉากโลหะ 2x2 รู x1แผ่นอะคริลิคยึด HC-SR04
โมดูลวัดระยะทาง HC-SR04
สกรูเกลียวปล่อย 2 มม. x 2 สกรู 3x6 มม. x 3นอต 3 มม. x 3
(3) เสียบส�ยสัญญ�ณโดยใช้ส�ย PCB3AC ส�ย Trig ให้เสียบเฉพ�ะสีแดง และสีข�ว ส่วน Echo ให้เสียบเฉพ�ะสีดำ�และสีข�ว โดยปล่อย
ปล�ยส�ยที่เหลือทิ้งไว้
ดำา (Gnd)
แดง (Vcc)ขาว (Echo)
ขา 31 (Trig)
ขา 30 (Echo)
ขาว (Trig)

7
(4) นำ�โมดูลวัดระยะท�ง HC-SR04 ติดตั้งเข้�ที่ด้�นหน้�ของหุ่นยนต์ โดยใช้สกรูขน�ด 3x6 มม. ขันยึด
(5) เสียบส�ยสัญญ�ณจ�กข้อที่ (3) เข้�ที่จุดต่อ 31/A7 สำ�หรับข� Trig และจุดต่อ 30/A6 สำ�หรับ Echo
ขา 30 (Echo)ขา 31 (Trig)