bioloch 6 th month meeting bio-mimetic structures for locomotion in the human body 8-9 november 2002...
TRANSCRIPT

BIOLOCH 6th month MeetingBIO-mimetic structures for LOComotion in the Human body
8-9 November 2002Scuola Superiore Sant’Anna, Polo Sant’Anna
Valdera, Pontedera (PI), Italy

Agenda of the Meeting (1/2)
Friday, November 8, 200214.30 – 15.00 Welcome and description of the Meeting Objectives (Coordinator)Main achievements, Deliverable preparation, Administrative issues (new role of UoT, DUP, Leuwen meeting, etc)15.00 – 16.30 Review and analysis of the biological locomotion systems and strategies useful for the design of the biomimetic locomotion unit (D1)The aim of this discussion will be to identify a taxonomy for locomotion of biological creatures with a preference for no-swimming and no-flying creatures. Three applications will be approached (endo-luminal surgery, inspection, rescue microrobotics) with a strong preference for the medical field. A deep analysis of Locomotion principles, Adhesion principles and Control principles should be presented.This analysis will be guided by SSSA at the beginning. Contributions and interventions will be asked to the partners for the following points: Description/characterization of locomotion mechanisms of biological structures (BATH), Control mechanisms of the biological creatures for locomotion (FORTH), Environment analysis and replication (UoT and UoP)16.30 – 16.45 Coffee Break16.45 – 18.30 Review and analysis of the biological locomotion systems and strategies useful for the design of the biomimetic locomotion unit (D1) – continuing 18.30 – 19.00 Conclusion of the first day (scientific part)19.00 – 19.30 Discussion of administrative and contractual issues20.00 Social Dinner in a local restaurant

Saturday, November 9, 2002
09.00 – 09.15 Presentation of the second day objective (Project Coordinator)
09.15 – 11.00 Enabling technologies for the design and fabrication of the systems identified on the first day
The aim of the second day is to identify which technologies, which control strategies, which design method can be exploited to implement the “preferred” biomimetic units in a concrete way. Main contributions are expected by SSSA, UoP, FORTH.
11.00 – 11.15 Coffee Break
11.15 – 12.30 Enabling technologies for the design and fabrication of the systems identified on the first day - continuing. Final Discussion
12.30 – 12.45 Decision for the next meetings and end of the meeting
Agenda of the Meeting (2/2)
All Partners are kindly requested to give SSSA
the presentation material at the end of the meeting

Welcome and description of the Meeting Objectives

BIOLOCH Team Presentation
Some new faces from:
SSSA
UoB
UoT
FORTH
UoP

The Work Flow and the Meeting Output
UT
UoB
FORTH
UoP
SSSA
Prototypes
Taxonomy of locomotion mechanisms and matching with enabling technologies

From models to applications / from applications to models?
Locomotion models
Applications
Enabling Technologies
Endoscopy Undergroundlocomotion
Paddleworm
…………
Adhesion modelsOctopus
………

WorkPackage Overview: Where we are
Project Management
Study of locomotion mechanisms of lower animal forms
Modelling and design of artificial structures which replicate biological
mechanisms
Enabling technologies and principles for fabricating biomimetic components
Understanding and replicating biological perception of lower animal
forms
Control strategy and control implementation
Fabrication of prototypes of biomimetic locomotion machines
Experiments on prototypes of biomimetic locomotion machines
Dissemination and Implementation
WP1
00 06 12 18 24 30
36
WP4
WP2
WP6
WP3
WP8
WP5
WP7
WP0

Where we are
WP1
00 06 12 18 24 30
36
WP4
WP2
WP6
WP3
WP8
WP5
WP7
WP0 M1: Selection and design of the preferred biomimetic locomotion principle to be implemented
M2: Selection and design of the perception-reaction strategy to be implemented
M3: Fabrication of the biomimetic locomotion prototype (or BLU)
M4: Testing of the biomimetic locomotion prototype and overall validation

Administrative and Scientific accomplishments
•Preparation of deliverables: DUP, Project Presentation and D1 (with November 15)
•Leuven Meeting (December 3)
•UoT UoT + IHCI at Steinbeis University (with Novineon Healthcare technology as subcontract)
•Consortium Agreement

IST – 2001 - 34181BIOLOCH
BIO-mimetic structures for LOComotion in the Human body
D0 Project PresentationSubmitted to Project Officer November 3,
2002

IST-2001-34181 - BIOLOCH BIO-mimetic structures for LOComotion
in the Human body • Long-Term Objectives:
to understand motion and perception systems of lower animal forms and to design and fabricate bio-inspired mini- and micro-machines able to navigate in the human body.
• Middle-Term Objectives:
– Study on the biomechanics of locomotion of worms, insects and parasites; on the biological perception-reaction mechanisms which control their locomotion and on the interaction between biological and artificial structures attaching to the gut tissue;
– Technological innovation, by setting up biologically inspired design paradigms and by implementing bio-mimetic designs via hybrid manufacturing technologies;
– Fabrication and testing of smart biomechatronic devices for biomedical applications.
• Milestone #1:– Selection and design of the
preferred biomimetic locomotion principle to be implemented
• Milestone #2:– Selection and design of the
perception-reaction strategy to be implemented
• Milestone #3:– Fabrication of the biomimetic
locomotion prototype (or BLU)
• Milestone #4:– Testing of the biomimetic
locomotion prototype and overall validation
• D0 Project Presentation

• Starting date: May 1, 2002• End date: April 30, 2005• Project Duration: 36 months• Funding:
– Total costs: € 1.654.570– Community Funding: € 1.503.900
• Partners:– Scuola Superiore Sant’Anna (SSSA) -
Pisa (I) – Co-ordinator– University of Bath, Department of
Mechanical Engineering (UBAH Mech Eng) – United Kingdom
– Centro "E. Piaggio", Faculty of Engineering, University of Pisa (UniPi) - Italy
– FORTH - Foundation for Research and Technology – Hellas (FORTH) - Greece
– University of Tuebingen, Section for minimally invasive surgery (UoT) - Germany
Project Coordinator: Prof. Paolo Dario
CRIM Lab - Scuola Superiore S. AnnaPiazza Martiri della Libertà, 33
56127 PISA (ITALY)
Tel. +39-050-883400 / +39-050-883401Fax. +39-050-883402e-mail: [email protected] web site: http://www-crim.sssup.it
List of Principal Investigators of BIOLOCH Project Co-ordinator: Prof. Paolo DarioProject Manager: Dr. Arianna Menciassi
Technical Team Co-ordinatorsSSSA: Prof. Paolo DarioUBAH Mech Eng : Prof. Julian VincentUniPi: Prof. Danilo De RossiFORTH : Dr. Dimitris TsakirisUoT : Prof. Marc Schurr
IST-2001-34181 - BIOLOCH BIO-mimetic structures for LOComotion
in the Human body
• D0 Project Presentation

Administrative accomplishments
Reply from Dr. Lacombe concerning the new role of UoT:
As you are adding a new partner, the only way is via a contract amendment.
In order to do this we need
1) a letter from the coordinator explaining the situation and asking for an amendment to the contract.
2) a new version of the CPFs with the new partner and the new budget (you can send them via e-mail + "original signatures" only by post)
3) an update of Annex 1 incorporating the changes.

Agenda of the Meeting (1/2)
Friday, November 8, 2002
15.00 – 16.30 Review and analysis of the biological locomotion systems and strategies useful for the design of the biomimetic locomotion unit
(D1)16.30 – 16.45 Coffee Break16.45 – 18.30 Review and analysis of the biological locomotion systems and strategies useful for the design of the biomimetic locomotion unit (D1) – continuing 18.30 – 19.00 Conclusion of the first day (scientific part)

Review and analysis of the biological locomotion systems and strategies useful
for the design of the biomimetic locomotion unit

The Approach
•We have essentially considered biological locomotion systems which are exploited for propulsion in “solid” or “semisolid” environments, thus excluding fin-based or wing-based systems.
•For this reason, the review can be divided in “Systems for adhesion” and “Systems for locomotion/propulsion”. In this presentation, locomotion often indicates the displacement of “adhesive” contact points.
•After the analysis of the mechanics of adhesion and locomotion a review of the control strategies for some selected propulsion mechanisms should be considered.

Adhesion systems

Adhesion Systems 1/2
SuctionSuction occurs when an animal creates a partial vacuum over some area of the substrate – body interface. It is limited by the magnitude of the air – pressure differential produced.
FrictionFriction is the force that opposes motion between two surfaces in contact. Frictional forces depend on a normal force holding the surfaces together.
Marc Schurr:
Another system for adhering on biological structures is grasping
WE CAN CALL 3D ADHESION (MECHANICAL CLAMPING or holding for locomotion)
Graspinginterlocking?
Marc Schurr:
Another system for adhering on biological structures is grasping
WE CAN CALL 3D ADHESION (MECHANICAL CLAMPING or holding for locomotion)
Graspinginterlocking?

Adhesion Systems 2/2
Adhesion by van der Walls interactionsVan der Waals forces are any of the non – covalent attractive or repulsive forces acting upon neutral atoms or molecules.
Adhesion by biological glueGluing involves a cement spread between two surfaces. The principle combines adhesion (the intermolecular forces between two dissimilar materials) and cohesion (the intermolecular forces among identical molecules)
Dimitris:
Adhesion by sucking is passive. Sucker does not allow manipulation
Dimitris:
Adhesion by sucking is passive. Sucker does not allow manipulation

Biological solutions

Suction 1/3
Taenia Solium
Parasite of the human gut, Taenia Solium is characterized by a clubbed head (Scolex), with four muscular suckers and several row of hooks located above a reversing Rostellum; the suckers and the hooks fix the Scolex to the intestinal wall

Suction 2/3
Bats
Disk–like structures on the wrists and ankles of four species of bats are presumed to give these animals the ability to grip to smooth surfaces such as the waxy cuticles of furled leaves

Suction 3/3
Octopods
• An octopus uses a very efficient device to generate a powerful adhesive force;
• it can grip a remarkable range of objects, even if they are smaller than the suckers

Friction 1/3
Primates
Frictional properties of skin, dependent on the water content and on the amount of sebum secretion, enables small primates to cling large vertical supports

Friction 2/3
Snakes
The double – ridge microfibrillar geometry of snake scales provides ideal conditions for sliding in a forward direction with minimum adhesive forces

Friction 3/3
Plants
• Plant tissue can replicate a surface profile by growing into surface depressions;
• seeds of many plants possess hooking devices and use animals to disperse themselves some distance from the parent plant;
• the hooks contact animal hairs, interlock and they are transported by the animals

Adhesion by biological glue 1/3
Transitory adhesion of soft – bodied invertebrates
Many animals can move along the substrate thanks to the secretion of a viscous film, which they leave behind as they move; differences in the adhesive and frictional properties of different parts of the foot are caused by the mechanical properties of pedal mucus at different velocities

Adhesion by biological glue 2/3
Byssus adhesion in molluscs
The byssus is an extracellular structure consisting of a thread attached to the animal at one end and to a substrate at the other; the distal ends of the threads are attached to oval adhesive plaques which adheres to the substrate by secreting mucosubstance and polyphenolic protein

Adhesion by biological glue 3/3
Ants’ Arolium
Arolium is a smooth pad located between the claws; its adhesion to flat surfaces is mediated by a thin liquid film between the Arolium and the surface, while its adhesion to rough surface happens by using the claws

Adhesion by van der Walls interactions 1/2
Cell adhesion
Multicellular organisms consist of many cells, which adhere to each other by chemical bonds and van der Waals interactions

Lizard
• On the underside of the feet there are microscopic bristles (about 90 μm long and 10 μm wide);
• at the distal ends of the bristles there are very small terminal sub–division (of the order of 0.1 μm – 0.5 μm);
• Geckos use electrical forces to attach to surfaces;
• These forces are due to the interactions of electrons in surface atoms and molecules
Adhesion by van der Walls interactions 2/2

Comparative table
Force Easiness of artificial
replication
Type of surface
Stability
Suction
Friction
Biological Glue
Van der Waals
Force Easiness of artificial
replication
Type of surface
Stability
Suction 2 5 Smooth 2
Friction/holding 3 5 Rough 4
Biological Glue 1 2 Both 1
Van der Waals 5 1 Smooth 3
Numbers indicate a relative scale between 1 and 5, a high number means a good performance
Marc:
We should add grasping at least for the GI tract
Marc:
We should add grasping at least for the GI tract
DIMITRIS:
We should QUATIFY the smoothness and roughness on the basis of a dimensional analysis
DIMITRIS:
We should QUATIFY the smoothness and roughness on the basis of a dimensional analysis

Locomotion systems
Locomotion systems observed in lower animal forms
• Pedal
• Peristaltic
• Contract-anchor-extend
• Serpentine
• Rectilinear
• Concertina
• Sidewinding
• Polypedal

Pedal locomotion 1/2
slow continuing gliding typical of aquatic locomotion in invertebrates such as flatworms, some cnidarians, and gastropods

Pedal locomotion 2/2
• Propulsion is generated by the passage of contraction waves through the ventral musculature, which is in contact with the bottom surface;
• the pedal contraction waves are either direct or retrograde;
• when a direct wave reaches a muscle, the muscle contracts and lifts a small part of the body;
• the body is carried forward and set down anterior to its original position.
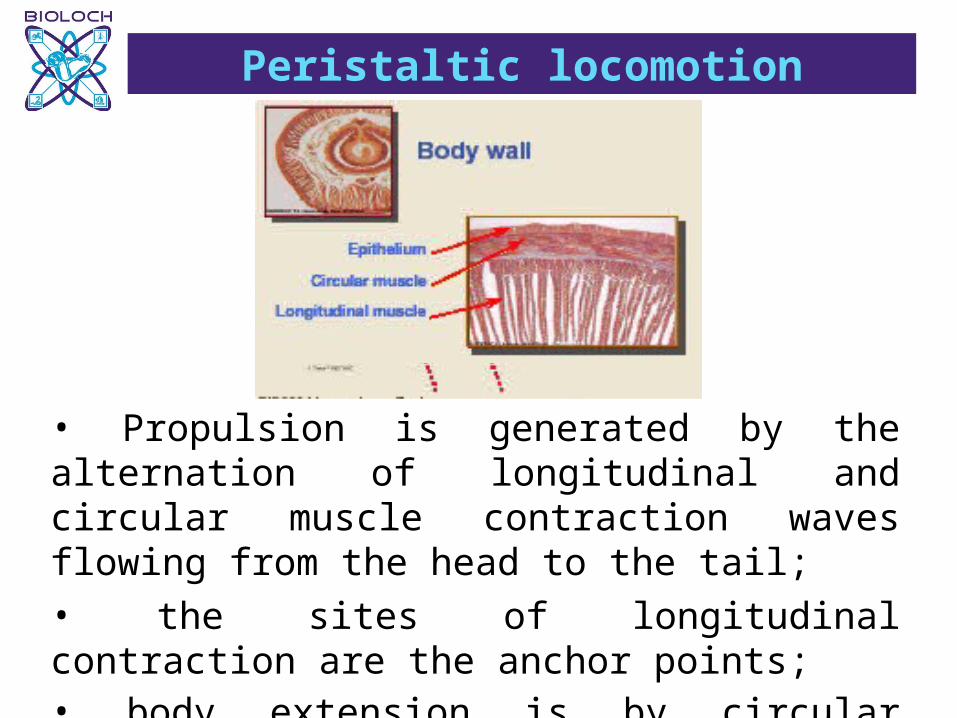
Peristaltic locomotion
Peristaltic locomotion is used by soft-bodied invertebrates such as earthworms to penetrate soil or mud
• Propulsion is generated by the alternation of longitudinal and circular muscle contraction waves flowing from the head to the tail;• the sites of longitudinal contraction are the anchor points; • body extension is by circular contraction.

Contract-anchor-extend locomotion
Contract-anchor-extend locomotion is used by bivalve molluscs, such as clams in acquatic locomotion along bottom surfaces
1. Foot is extended by contraction of the transverse muscles;
2. siphons are closed;3. adductor muscle of the
shell contracts;
blood is forced into the tip of the foot and causes it to dilate.
With the tip acting as an anchor, the longitudinal muscles then contract, pulling the body down to the anchored foot

Serpentine locomotion is typical of snakes, legless lizards, worm lizard and caecilians
Serpentine locomotion
• The body is thrown into a series of sinus curves;
• when a snake starts to move, the entire body moves, and all parts follow the same path as the head.
• propulsion is by a simultaneous lateral thrust in all segments of the body in contact with solid projections
• not effective on flat or not rigid frictional surfaces

Rectilinear locomotion
Rectilinear locomotion is typical of giant snake, fossorial vertebrates
muscles
scale• each ventral scale is moved by two pairs of muscles attached to ribs
• one pair of muscles is inclined posterior at an angle; the other is inclined anterior at an angle• as contraction waves move rearward from the head the anterior oblique muscles of a scale contract first and lift the scale upward and forward. When the posterior oblique muscles contract, the scale is pulled rearward, but its edge anchors it, and the body is pulled forward
• This sequence is repeated by all segments as the contraction wave passes posteriorly, and, as a series of contraction waves follow one another, the body slowly inches forward;
• effective on flat surface. Used for slow motion, stalking

Concertina locomotion
Concertina locomotion is typical of snakes
• After the body is thrown into a series of tight, sinuous loops, forming a frictional anchor, the head slowly extends forward until the body is nearly straight or begins to slide;
• The anterior end forms a small series of loops and, with this anchor, pulls the posterior regions forward, after which the sequence of movements is repeated.
• Used where there is not enough frictional resistance along the locomotor surface for serpentine locomotion;
Graham:
This locomotion is included in a 57 page patent
Graham:
This locomotion is included in a 57 page patent

Sidewinding locomotion
Sidewalking locomotion is typical of snakes
• the body moves through a series of sinuous curves, but the track made by the snake is a set of parallel lines that are roughly perpendicular to the axis of movement;
• only two parts of the body touch the ground at any instant; the rest of the body is held off the ground
• used when the locomotor surface fails to provide a rigid frictional base, is a specific adaptation for crawling over friable sandy soils;

Polypedal terrestrial locomotion
Rapid surface locomotion developed by arthropods (e.g., insects, spiders, and crustaceans) and vertebrates
• the body is raised above the ground and moved forward by the legs
• the legs provide support as well as propulsion
• the sequences of their movements must be adjusted to maintain the body’s centre of gravity within a zone of support
• many legs increase stability but reduce the maximum speed of locomotion

Comparison table of different locomotion systems
Energy consumptio
nContact surface Stability
Easiness of artificial
replication
Pedal
Peristlatic
Contract-anchor-extend
Serpentine
Rectilinear
Concertina
Sidewinding
Polypedal (4 legs)
Polypedal (6 legs)
Relative scale between 1 and 5; higher number indicates better performance
Energy consumptio
nContact surface Stability
Easiness of artificial
replication
Pedal 1 Rough, wet 5 5
Peristlatic 1 Rough, wet 5 4
Contract-anchor-extend
1 Rough, wet 5 4
Serpentine 4 Rough 5 2
Rectilinear 3 Flat 5 2
Concertina 3 Not enough frictional
5 2
Sidewinding 4 Not rigid (sandy soil) 5 1
Polypedal (4 legs)
5 All 3 1
Polypedal (6 legs)
2 All 4 2
Thomas:
There is a difference with the D1. Add speed!
Marc:
Among the criteria, we should add the space requirement/constraints
Thomas:
There is a difference with the D1. Add speed!
Marc:
Among the criteria, we should add the space requirement/constraints

Control Strategies

Comparative analysisLocomotion
Adhesion Control
Animal Model 1
Animal Model 2
Animal Model 3
….
….

The envisaged applications

Possible applications
• medical
• inspection robotics
• rescue robotics
While Bioloch efforts will mainly be driven to medical
application, locomotion design solutions can be applied to
other fields.

Possible applications
medical inspection robotics rescue
robotics• endo-luminal surgery
• gastroscopy
• foetal surgery
• gynaecological inspection
•…While Bioloch efforts will mainly be driven to medical
application, locomotion design solutions can be applied to
other fields.
Possible follow-ups for design solutions and modules

Possible applications
Inspection Robotics
Inspection Robots allow the operator to view
and diagnose problems in a wide variety of
industries and hazardous situations, from a
remote location.

Possible applications
Inspection Robotics• Air Conditioning and Plant
• inspection and verification of Sick Building Syndrome;• inspection and verification of fungal growths in ducted systems;• maintaining indoor air quality inspection and cleaning;
• Occupational Health and Safety• inspection and verification of asbestos in roof and cavities;• inspection of hazardous areas, e.g. wheat silos, storage tanks;
• Law Enforcement• inspection and verification of hazardous situations.

Possible applications
Inspection Robotics
used for inspection and cleaning of
inner surfaces of sea water pipes in
a nuclear power station.
The robot cleans the inner walls of
pipes using high pressure jet water. It
uses a camera to inspects the lining of
the pipe, looking for peeled or
damaged sections.
Kansai electric Power Company and Toshiba Corporation, Japan
Seawater cleaning and inspection robot

Possible applications
Inspection Robotics
Despite the large number of robots currently available
for pipe inspection, there is no performant system on
the market for airduct inspection.

Possible applications
Inspection Robotics
Airducts have characteristics different from underground pipes:
• many curves,
• strong air flow,
• normally no water in them
• square or circular section.
To inspect this type of ducts smaller and more agile robots
are needed.

Possible applications
Rescue Robotics
The idea came about after the 1995 bombing of the Alfred P.
Murrah Federal Building in Oklahoma City
Search-and-Rescue Robots
• were tested at New York Disaster Site;
• extend the reach of the rescue worker and keeps them out of
harm's way.

Possible applications
Rescue Robotics
Small robots equipped with cameras, microphones and
sensors to detect body heat can be released into holes or
pipes sticking out of the debris
Immunity to smoke and dust makes a strong case for the use
of robots in future rescue operations
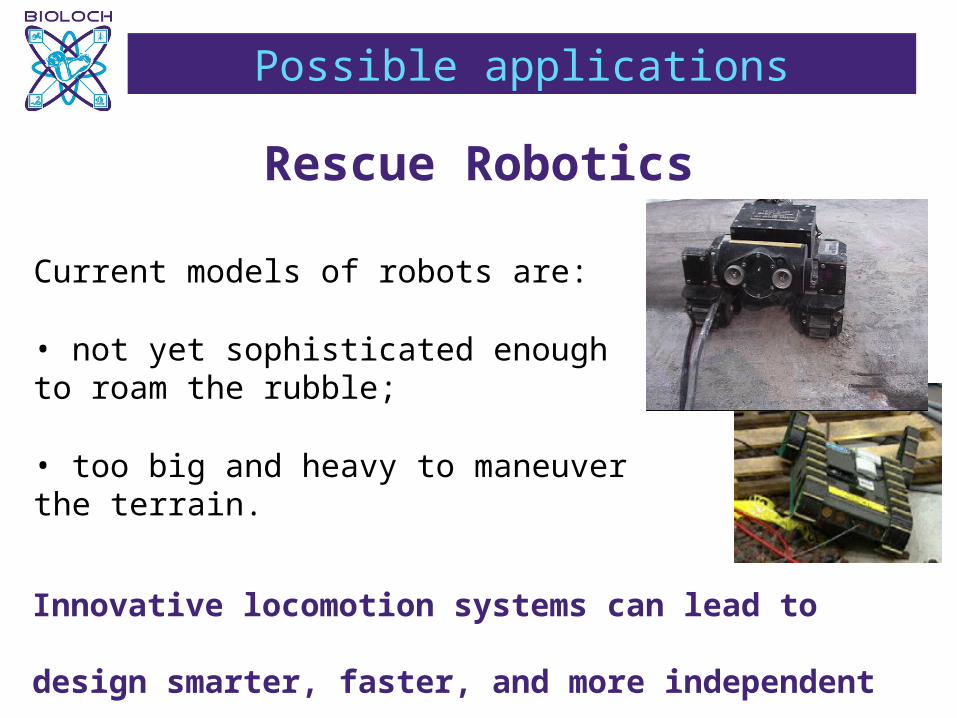
Possible applications
Rescue Robotics
Current models of robots are:
• not yet sophisticated enough to roam the rubble;
• too big and heavy to maneuver the terrain.
Innovative locomotion systems can lead to design
smarter, faster, and more independent search-and-rescue
robots