binary-coded extremal optimization for the design of pid controllers
TRANSCRIPT

Binary-coded extremal optimization for the design of PID controllers
Guo-Qiang Zeng a,n, Kang-Di Lu a, Yu-Xing Dai a, Zheng-Jiang Zhang a, Min-Rong Chen b,Chong-Wei Zheng a, Di Wu a, Wen-Wen Peng a
a Department of Electrical and Electronic Engineering, Wenzhou University, Wenzhou 325035, Chinab College of Information Engineering, Shenzhen University, Shenzhen 518060, China
a r t i c l e i n f o
Article history:Received 10 November 2013Received in revised form2 January 2014Accepted 23 January 2014Communicated by Zheng-Guang WuAvailable online 24 February 2014
Keywords:PID controllersExtremal optimizationPID parametersMultivariable plant
a b s t r a c t
Design of an effective and efficient PID controller to obtain high-quality performances such as highstability and satisfied transient response is of great theoretical and practical significance. This paperpresents a novel design method for PID controllers based on the binary-coded extremal optimizationalgorithm (BCEO). The basic idea behind the proposed method is encoding the PID parameters intoa binary string, evaluating the control performance by a more reasonable index than the integral ofabsolute error (IAE) and the integral of time weighted absolute error (ITAE), updating the solution bythe selection based on power-law probability distribution and binary mutation for the selected badelements. The experimental results on some benchmark instances have shown that the proposed BCEO-based PID design method is simpler, more efficient and effective than the existing popular evolutionaryalgorithms, such as the adaptive genetic algorithm (AGA), the self-organizing genetic algorithm (SOGA)and probability based binary particle swarm optimization (PBPSO) for single-variable plants. Moreover,the superiority of the BCEO method to AGA and PBPSO is demonstrated by the experimental results onthe multivariable benchmark plant.
& 2014 Elsevier B.V. All rights reserved.
1. Introduction
It has been widely recognized that Proportional-Integral-Derivative (PID) control is still one of the simplest but mostefficient control strategies for many real-world control problems[1–4], although a variety of advancements have been gained incontrol theories and practices. How to design and tune an effec-tive and efficient single-variable and especially multivariable PIDcontroller to obtain high-quality performances such as high stabi-lity and satisfied transient response is of great theoretical andpractical significance. This issue has attracted considerable atten-tions by some researchers using evolutionary algorithms [5,6],such as the genetic algorithm (GA) [7,8], particle swarm optimiza-tion (PSO) [9–12], differential evolution (DE) [13,14], and multi-objective optimization algorithms [6,15]. However, the issue ofdesigning and tuning PID controllers efficiently and adaptivelyis still open. As a consequence, this paper focuses on addressingthis issue by adopting another novel optimization algorithm calledbinary-coded extremal optimization in the attempt to obtainbetter performances.
Originally inspired by far-from-equilibrium dynamics of self-organized criticality (SOC) [16,17], extremal optimization (EO)[18,19] provides a novel insight into optimization domain becauseit merely selects against the bad instead of favoring the goodrandomly or according to a power-law distribution. The basic EOalgorithm and its modified versions have been successfully appliedto a variety of benchmark and real-world engineering optimiza-tion problems, such as graph partitioning [20], graph coloring [21],traveling salesman problem [22,23], maximum satisfiability (MAX-SAT) problem [24–26], heat pipe optimal design [27], and steelproduction scheduling [28]. The more comprehensive introductionconcerning EO is referred to the surveys [29,30]. However, thereare only few reported researches concerning the design of PIDcontrollers based on EO. In [31], an improved generalized EOalgorithm is proposed for designing two-degree-of-freedom PIDregulator. This paper focuses on a generalized design frameworkbased on binary coded EO (BCEO) for PID controllers, especially formore complex multivariable PID controllers. The basic idea behindthe BCEO-based PID controller design method is encoding the PIDparameters into a binary string, evaluating the control perfor-mance by a more reasonable index than the integral of absoluteerror (IAE) and the integral of time weighted absolute error (ITAE),updating the solution by the selection based on power-law prob-ability distribution and binary mutation for the selected badelements. Comparing with the existing popular evolutionaryalgorithms, e.g., adaptive GA (AGA) [32], self-organizing genetic
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/neucom
Neurocomputing
http://dx.doi.org/10.1016/j.neucom.2014.01.0460925-2312 & 2014 Elsevier B.V. All rights reserved.
n Corresponding author.E-mail addresses: [email protected],
[email protected] (G.-Q. Zeng).
Neurocomputing 138 (2014) 180–188

algorithm (SOGA) [8], probability based binary PSO (PBPSO) [11],etc., the proposed BCEO method in this paper is simpler, moreefficient and effective. Its superiority is demonstrated by theexperimental results on some benchmark single-variable andmultivariable instances.
The rest of this paper is organized as follows. Section 2 presentspreliminaries concerning on PID controller and EO used in thispaper. In Section 3, the BCEO algorithm for the design of PIDcontrollers is proposed. The experimental results on benchmarkengineering instances are given and discussed in Section 4. Finally,we give the conclusion and open problems in Section 5.
2. PID controllers and extremal optimization
2.1. PID controllers and its performance index
A standard control system with a PID controller D(s) andcontrolled plant G(s) is shown in Fig. 1. Let us consider firstly thesimplest case, single-input and single-output control system. Thetransfer function D(s) of a standard single-variable PID controller[1] is generally expressed as the following form:
DðsÞ ¼ KP 1þ 1TIs
þTDs� �
¼ KPþKI1sþKDs ð1Þ
where TI and TD are the integral time constant and the derivativetime constant, respectively, KP, KI, and KD are the proportional gain,the integral gain, and the derivative gain, respectively, KI¼KP/TIand KD¼KPTD.
The output U(s) of PID controller is described as follows:
UðsÞ ¼DðsÞEðsÞ ¼ KP 1þ 1TIs
þTDs� �
EðsÞ ¼ KPEðsÞþKI1sEðsÞþKDsEðsÞ
ð2Þ
where E(s) is the transfer function of the system error e(t).Furthermore, the continuous-time form of U(s) is also written asthe following equation:
uðtÞ ¼ KPeðtÞþKI
Z t
0eðtÞdtþKD
deðtÞdt
ð3Þ
The discrete PID controller is described as follows:
uðkÞ ¼ KPeðkÞþKITs ∑k
j ¼ 0eðjÞþKD
Ts½eðkÞ�eðk�1Þ� ð4Þ
where Ts is the sampling time.Then, consider more complex case, an n�n multivariable plant
G(s) [7] in Fig. 1, which is given as follows:
GðsÞ ¼g11ðsÞ ⋯ g1nðsÞ⋮ ⋱ ⋮
gn1ðsÞ … gnnðsÞ
264
375 ð5Þ
The corresponding n�n multivariable PID controller is given asfollows:
DðsÞ ¼d11ðsÞ ⋯ d1nðsÞ⋮ ⋱ ⋮
dn1ðsÞ … dnnðsÞ
264
375 ð6Þ
where the form of dij(s) is characterized as the following equation:
dijðsÞ ¼ KPijþKIij1sþKDijs; 8 i; jA 1;2;…;nf g ð7Þ
In most of previous research work, the integral of absoluteerror (IAE) and the integral of time weighted absolute error (ITAE)are generally used as the indices measuring the performances ofPID controllers [1]. However, these above indices are still notsufficient to evaluate the control performances comprehensively[8]. Here, another much more reasonable performance index ispresented by considering the following additional factors. The firstone is introduction of the square of the controllers' output, i.e.,R10 w2u2ðtÞdt in order to avoid exporting a large control value.Secondly, the rising time w3tu is used to evaluate the rapidity ofthe step response of a control system. The third one
R10 w4 ΔyðtÞ
�� ��dtis added to avoid a large overshoot value.
Definition 1. The objective function (also called fitness) evaluat-ing the control performance of a single-variable PID controller isdefined as follows [8]:
min J ¼ min
R10 ðw1jeðtÞjÞþw2u2ðtÞÞdtþw3tu; if ΔyðtÞZ0R10 ðw1jeðtÞjÞðþw2u2ðtÞþw4 ΔyðtÞ
�� ��Þdtþw3tu; if ΔyðtÞo0
(
ð8Þwhere e(t) is the system error, ΔyðtÞ ¼ yðtÞ�yðt�ΔtÞ, u(t) is thecontrol output at the time t, tu is the rising time, w1–w4 are theweight coefficients, and w4⪢w1.
Definition 1 can be generalized for evaluating a multivariablePID controller.
Definition 2. The objective function that evaluates the controlperformance of a multivariable PID controller is defined as follows:
min J ¼ min
R10 ðw1 ∑
n
i ¼ 1eiðtÞ�� ��þw2∑
n
iui
2ðtÞÞdtþw3 ∑n
i ¼ 1tui; if ΔyiðtÞZ0
R10 ðw1 ∑
n
i ¼ 1eiðtÞ�� ��þw2∑
n
iui
2ðtÞþw4 ∑n
i ¼ 1ΔyiðtÞ�� ��Þdtþw3 ∑
n
i ¼ 1tui; if ΔyiðtÞo0
:
8>><>>:
ð9Þwhere ei(t) is the i-th system error, ΔyiðtÞ ¼ yiðtÞ�yiðt�ΔtÞ, ui(t) isthe i-th control output at the time t, tui is the rising time of the i-thsystem output yi, w1–w4 are the weight coefficients, and w4⪢w1.
2.2. Extremal optimization
The key operations of EO include the evaluation of global andlocal fitness, selection of bad variables or elements, mutation andimprovement of the selected bad variables or elements. The basicprobability-based EO algorithm [18] is described as follows:
(1) Initialize configuration S randomly and set Sbest¼S and C(Sbest)¼C(S), where Sbest is the best solution so far and C(Sbest)is the global fitness of Sbest.
(2) For the current configuration S,(a) Evaluate the local fitness λi for each variable xi and rank all the
variables according to λi, i.e., find a permutation П1 of thelabels i such that λΠ1ð1ÞZλΠ1ð2ÞZ…ZλΠ1ðnÞ.
(b) Select a rank П1(k) according to a probability distributionPðkÞ; 1rkrn and denote the corresponding variable as xj.
(c) Generate the new solution Snew so that xj must be according tosome mutation rules.
(d) If C(Snew)oC(Sbest) then Sbest¼Snew.(e) Accept S¼Snew unconditionally.(3) Repeat at step (2) as long as desired.(4) Return Sbest and C(Sbest).
It is obvious that the probability distributions used for selectionof bad variables or elements play critical roles in controlling theperformances of the above EO algorithm. Power-law distributionFig. 1. A control system with PID controller.
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188 181

PðkÞ ¼ k� τ ; ð1rkrnÞ is originally used for evolution in the τ-EOalgorithm, where τ is a positive parameter of controlling thepower-law probability distribution. Moreover, the other effectiveprobability distributions include exponential and hybrid distribu-tions. More details concerning the best possible probability dis-tributions used for evolution from the perspective of experimentsrefers to our research work [33].
3. Binary-coded extremal optimization for PID controllers
In this section, we present a novel design method for PIDcontroller based on binary-coded extremal optimization (BCEO).Firstly, the fitness of any configuration encoding all the PID real-valued parameters into a binary string illustrated as Fig. 2 isevaluated as following the definition:
Definition 3. The fitness of any configuration S, where S is abinary string with length L¼∑M
j ¼ 1lj that encodes M PID designreal parameters {KPi, KIi, KDi, i¼1, 2,…,n,M¼3n} and the length lj ofj-th binary substring encodes the j-th parameter for an n-variablePID controller applied in a multivariable control system, is used toevaluate its effect on the control performances and defined asfollows:
CðSÞ ¼ ∑n
i ¼ 1ð ∑ΔyiðkÞZ0
ðw1 eiðkÞ�� ��þw2ui
2ðkÞÞ
þ ∑ΔyiðkÞo0
ðw4 ΔyiðkÞ�� ��Þþw3tuiÞ; ðk¼ 1;2;…;NÞ ð10Þ
eiðkÞ ¼ riðkÞ�yiðkÞ; i¼ 1;2;…;n ð11Þ
uiðkÞ ¼ KPieiðkÞþKIiTs ∑k
j ¼ 0eiðjÞþ
KDi
Ts½eiðkÞ�eiðk�1Þ�; i¼ 1;2;…;n
ð12Þ
ΔyiðkÞ ¼ yiðkÞ�yiðk�1Þ; i¼ 1;2;…;n ð13Þ
tui ¼ min fkgTs; i¼ 1;2;…;n; if 0:95ryiðkÞr1:05 ð14Þwhere Ts is the predefined sampling period, N is the time numberof sampling, ei(k) and ui(k) represent the system error and thecontrol output for a specific i-th PID controller at the k-th samplingtime, tui is the rising time of the system output yi corresponding toa specific i-th PID controller, w1–w4 are the weight coefficients,and w4⪢w1. In addition, the relationship between yi(k) and ui(k) isobtained by the following steps: Firstly, compute the equation Y(z)/U(z)¼Z[G(s)] by z-transform, and then obtain the differenceequation describing the relationship between yi(k), yi(k�1),… andui(k), ui(k�1),… by inverse z-transform. Clearly, the special casewhen n¼1 is just the fitness of single-variable PID controller.
The block diagram of a control system with BCEO-based PIDcontroller is shown in Fig. 3. The parameters KPi, KIi and KDi of a PIDcontroller are optimized by the proposed BCEO algorithm after aniteration process. To be more precise, the basic idea behind theproposed BCEO-based PID design method is encoding the PID real-valued parameters including KPi, KIi and KDi into a binary string,evaluating the control performance by Definition 3, selecting badbinary elements according to a probability distribution, mutationof the selected elements by flipping the binary elements, and
Fig. 2. Binary encoding of multivariable PID real parameters.
Fig. 3. The block diagram of a control system with BCEO-based PID controller.
Fig. 4. The flowchart of the BCEO-based PID controller design method.
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188182

updating the current solution by accepting the new solution aftermutation unconditionally. The optimization flowchart of theBCEO-based PID controller design algorithm is shown in Fig. 4.The detailed description is given as follows.
Algorithm 1. BCEO-based PID controller design algorithm
Input: A discrete-time model of controlled plant G(s) withsampling period Ts, the number M of PID controllers, the length ljof j-th binary substring corresponding to j-th parameter, theweight coefficients w1–w4 used for evaluating the fitness, themaximum number of iterations Imax, the control parameter of theprobability distribution P(k).
Output: The best solution Sbest (the best PID parameters KPO,KIO, and KDO) and the corresponding global fitness Cbest.
(1) Generate an initial configuration S randomly, where S¼[KP1,KI1, KD1,…, KPi, KIi, KDi,…, KPn, KIn, KDn] is a binary string withlength L¼∑M
j ¼ 1lj that encodes M PID design parameters andset Sbest¼S and Cbest¼C(S) based on Definition 3.
(2) For configuration S,(a) generate the configuration Si by flipping the bit i (1r irL) and
keeping the others unchanged, then compute the fitness C(Si)based on Definition 3;
(b) evaluate the local fitness λi¼C(Si)�Cbest for each bit i and rankall the bits according to λi, i.e., find a permutation П1 of thelabels i such that λΠ1ð1ÞZλΠ1ð2ÞZ…ZλΠ1ðLÞ;
(c) select a rank П1(k) according to a probability distribution P(k),1rkrL and denote the corresponding bit as xj;
(d) flip the value of xj and set Snew¼S in which xj value is flipped;(e) if C(Snew)rC(Sbest), then Sbest¼Snew;(f) accept Snew unconditionally.(3) Repeat step 2 until some predefined stopping criteria (e.g., the
maximum number of iterations) are satisfied.(4) Obtain the best solution Sbest and the corresponding global
fitness Cbest.
As mentioned in Section 2, the power-law, exponential orhybrid distribution can be chosen as the effective probabilitydistributions P(k) used in the above proposed BCEO method. Inthis work, we choose the power-law as the evolutionary prob-ability distribution, where only parameter τ needs to adjust.The effects of other probability distributions on the performanceswill be analyzed in a similar way by readers. The parameter ljdetermines the accuracy of binary encoding. The sampling periodTs plays an important role in effecting the stability of the controlsystem. In general, the smaller is Ts, the more stability of thecontrol system. In real-world situations, the weight coefficientsw1–w4 used for evaluating the fitness are generally determinedaccording to the experiential rules, which are similar to those inreference [8]. More specifically, the parameters w1 and w2 aresubject to the equation w1þw2¼1 and the value of w1 is oftenmuch larger than w2. Additionally, w3 often ranges from 2 to5 while w4 is generally from 50 to 100 or larger values. In practice,the more precise values of these parameters for a specific instanceare further determined by trial and error.
The proposed BCEO-based PID design algorithm has lessadjustable parameters than other existing methods based onpopular evolutionary algorithms such as AGA [32], SOGA [8], andPBPSO [11]. More specially, except the maximum number ofiterations and the length lj of j-th binary substring correspondingto j-th PID parameter, only one parameter τ should be tuned inBCEO while three parameters including the population size, thecrossover probability and mutation probability need to tune inAGA at least, four adjustable parameters including population size,the selection pressure turning coefficient β, the mutation turningcoefficient α and the mutation period Tc in SOGA and moreparameters including the population size, inertia weight w, accel-eration factors c1 and c2 need to tune in PBPSO. Furthermore, BCEOhas only selection and mutation operations from the perspectiveof the evolutionary algorithm. Therefore, the BCEO-based PIDdesign method is much simpler than the methods based onAGA, SOGA and PBPSO. Additionally, the proposed BCEO is moreeffective and efficient than AGA, SOGA and PBPSO, which will bedemonstrated by the experimental results on some benchmarkexamples in the next section.
4. Experimental results
To demonstrate the effectiveness of the proposed BCEO algorithm,this section chooses some benchmark engineering instances astested. It should be noted that all the following experiments havebeen implemented on by MATLAB software on a 3.10 GHz PC withI5-2400 processor and 4 GB RAM. In the following experiments, 20runs of each algorithm are implemented for a benchmark example.
4.1. Single-variable controlled plant
In this subsection, two single-variable plants [8] are chosen toillustrate the superiority of the BCEO algorithm to the existingpopular evolutionary optimization algorithms, such as AGA [32],SOGA [8], and PBPSO [11]. The transfer functions of the benchmarkplants 1 and 2 denoted as G1(s) and G2(s) are as follows:
G1ðsÞ ¼1:6
s2þ2:584sþ1:6ð15Þ
G2ðsÞ ¼15
50s3þ43s2þ3sþ1ð16Þ
To compare performances of the proposed BCEO algorithm withthe reported algorithms [8] under the same criterion, the values ofthe weight coefficients used in the evaluation of fitness are pre-defined as follows: w1¼0.999, w2¼0.001, w3¼2.0, and w4¼50 andsampling period Ts is set to 0.05 s. The parameters used in AGA [32],SOGA [8], PBPSO [11] and BCEO for plants 1 and 2 are shown inTable 1. Except the maximum number of iterations Imax and thelength lj of j-th binary substring corresponding to j-th PID parameter,AGA, SOGA and PBPSO have 3 main adjustable parameters includingpopulation size, crossover probability and mutation probability andSOGA has 4 main adjustable parameters including population size,the selection pressure turning coefficient β, the mutation turningcoefficient α and the mutation period Tc. PBPSO has 6 main
Table 1The adjustable parameters used in AGA, SOGA, PBPSO and BCEO for plants 1 and 2.
Algorithm Population size Selection pc pm Inertia weight Acceleration factors Vmax Imax lj
AGA [32] 50 – 0.7 0.01 – – – 100 10SOGA [8] 50 β¼0.7 0.6 α¼4, Tc¼50 – – – 100 10PBPSO [11] 50 – – – wmax¼0.8 c1¼2.0 50 100 16
wmin¼0.8 c2¼2.0BCEO – τ¼1.3 – – – – – 100 10
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188 183

adjustable parameters including the population size, inertia weightswmax and wmin, acceleration factors c1 and c2, and Vmax while BCEOhas only a control parameter τ for power-law probability distribution.In this sense, BCEO is much simpler than AGA, SOGA and PBPSO.
The performances of these algorithms are evaluated by theseindices including the best fitness (BF), overshoot s%, rising time tu(s, ab. s), steady-state error ess%, settling time 0.1%tw (s, ab. s) with0.1% error and the average running time T (s, ab. s). The experi-mental results of AGA [32], SOGA [8], PBPSO [11] and BCEO forsingle-variable controlled plants 1 and 2 are shown in Table 2.
The step responses for plant 1 under different algorithms-based PID controllers are compared in Fig. 5. Clearly, the indicesincluding s%, 0.1%tw, and ess% obtained by BCEO are all smallerthan those by AGA, SOGA and PBPSO, and tu obtained by BCEO isequivalent to that by AGA and PBPSO and smaller than that bySOGA. This indicates that the transient and steady-state perfor-mances obtained by BCEO are better than those by AGA and SOGA.In addition, the BF and T of BCEO are also smaller than those ofAGA, SOGA and PBPSO. In other words, the proposed BCEO-basedPID algorithm is more effective and efficient than AGA, SOGA andPBPSO for plant 1.
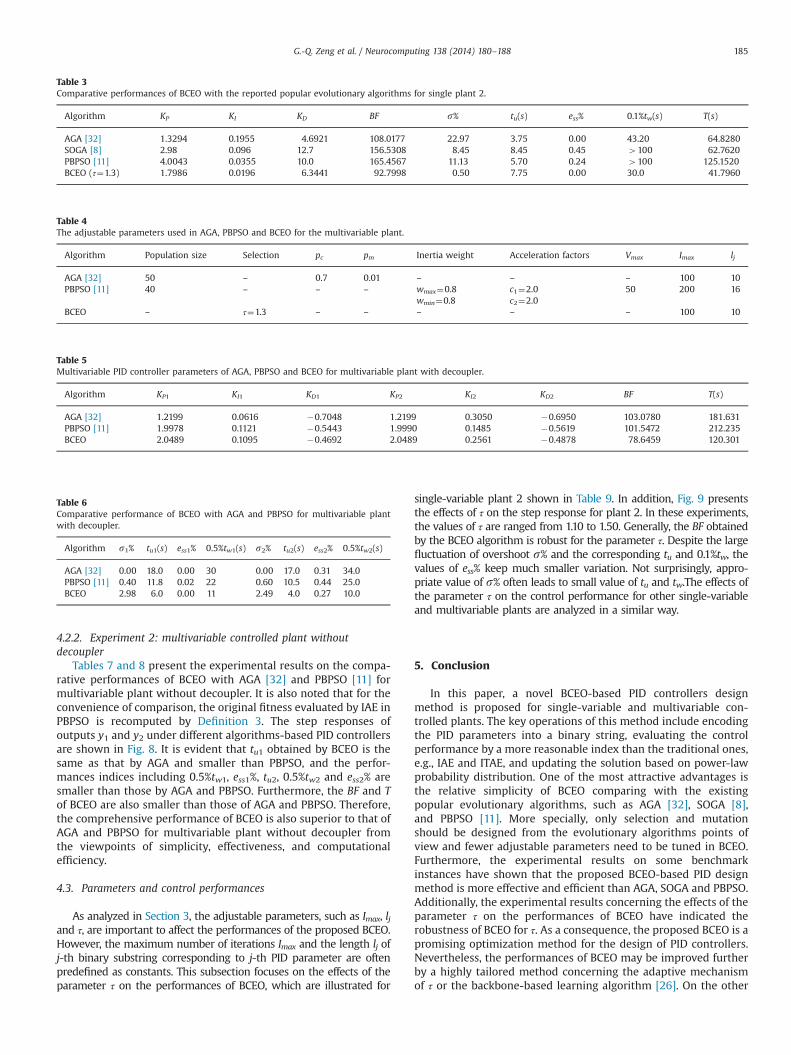
The step responses for plant 2 under different algorithms-basedPID controllers are shown in Fig. 6. From the experimental results ofAGA [32], SOGA [8], PBPSO [11] and BCEO for plant 2 shown inTable 3, it is obvious that the transient and steady-state performancesobtained by BCEO for plant 2 are better than those by AGA, SOGA,and PBPSO. Moreover, the BF and T of BCEO are also smaller thanthose of AGA, SOGA and PBPSO. In other words, the proposed BCEO-based PID algorithm is also more effective and efficient than AGA,SOGA and PBPSO for plant 2.
4.2. Multivariable controlled plant
To illustrate the superiority of the proposed BCEO algorithm toAGA [32] and PBPSO [11] for the multivariable plants, the follow-ing binary distillation column plant [34] with 2-input and 2-
output is chosen as a benchmark example:
GmðsÞ ¼12:8e� s
1þ16:7s�18:9e� 3s
1þ21s6:6e� 7s
1þ10:9s�19:4e� 3s
1þ14:4s
24
35 ð17Þ
The steady-state decoupling matrix of the above controlled plantmodel is given as follows:
D¼ G�1m ð0Þ ¼ 0:1570 �0:1529
0:0534 �0:1036
� �ð18Þ
In the following experiments for multivariable plant, thevalues of the weight coefficients used in the evaluation offitness are predefined as follows: w1¼0.999, w2¼0.001, w3¼2.0,and w4¼100. The parameters used in AGA [32], PBPSO [11] andBCEO for multivariable plant are shown in Table 4. By the similaranalysis as the single-variable PID controller in Subsection 4.1,BCEO is also simpler than AGA and PBPSO for multivariable PIDcontroller.
4.2.1. Experiment 1: multivariable controlled plant with decouplerThe experimental results on the comparative performances of
BCEO with AGA [32] and PBPSO [11] for multivariable plant withdecoupler are shown in Tables 5 and 6. In PBPSO, the originalfitness is evaluated by IAE and the best fitness value is 159.5911[11]. Here, for the convenience of comparison, the new best fitnessvalue of PBPSO under the same values of PID parameters isobtained as 101.4572 according to aforementioned Definition 3.Fig. 7 presents the step response of outputs y1 and y2 underdifferent algorithms-based PID controllers. Although the over-shoots s1% and s2% obtained by BCEO are larger than those byAGA and PBPSO, the performances indices including tu1, 0.5%tw1,tu2, 0.5%tw2 and ess2% are smaller than those by AGA and PBPSO,and ess1% obtained by BCEO is the same as that by AGA and smallerthan PBPSO. The BF and T of BCEO are also smaller than those ofAGA and PBPSO. By considering the above analyses comprehen-sively, it is clear that the proposed BCEO outperforms AGA andPBPSO for multivariable plant with decoupler in terms of simpli-city, effectiveness, and computational efficiency.
Table 2Comparative performances of BCEO with the reported popular evolutionary algorithms for single-variable plant 1.
Algorithm KP KI KD BF s% tu(s) ess% 0.1%tw(s) T(s)
AGA [32] 15.2884 2.7566 3.4506 9.8644 0.21 0.65 0.05 5.80 52.2760SOGA [8] 19.3900 4.1190 5.1510 14.2753 2.81 0.90 0.51 410 51.3921PBPSO [11] 19.9990 4.2174 3.9562 14.1507 3.78 0.65 0.35 410 78.9850BCEO (τ¼1.3) 17.5171 2.6393 3.9296 9.7605 0.01 0.65 0.00 2.00 19.8290
Fig. 5. Comparison of step response for plant 1 under different algorithms-basedPID controllers.
Fig. 6. Comparison of step response for plant 2 under different algorithms-basedPID controllers.
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188184
4.2.2. Experiment 2: multivariable controlled plant withoutdecoupler
Tables 7 and 8 present the experimental results on the compa-rative performances of BCEO with AGA [32] and PBPSO [11] formultivariable plant without decoupler. It is also noted that for theconvenience of comparison, the original fitness evaluated by IAE inPBPSO is recomputed by Definition 3. The step responses ofoutputs y1 and y2 under different algorithms-based PID controllersare shown in Fig. 8. It is evident that tu1 obtained by BCEO is thesame as that by AGA and smaller than PBPSO, and the perfor-mances indices including 0.5%tw1, ess1%, tu2, 0.5%tw2 and ess2% aresmaller than those by AGA and PBPSO. Furthermore, the BF and Tof BCEO are also smaller than those of AGA and PBPSO. Therefore,the comprehensive performance of BCEO is also superior to that ofAGA and PBPSO for multivariable plant without decoupler fromthe viewpoints of simplicity, effectiveness, and computationalefficiency.
4.3. Parameters and control performances
As analyzed in Section 3, the adjustable parameters, such as Imax, ljand τ, are important to affect the performances of the proposed BCEO.However, the maximum number of iterations Imax and the length lj ofj-th binary substring corresponding to j-th PID parameter are oftenpredefined as constants. This subsection focuses on the effects of theparameter τ on the performances of BCEO, which are illustrated for
single-variable plant 2 shown in Table 9. In addition, Fig. 9 presentsthe effects of τ on the step response for plant 2. In these experiments,the values of τ are ranged from 1.10 to 1.50. Generally, the BF obtainedby the BCEO algorithm is robust for the parameter τ. Despite the largefluctuation of overshoot s% and the corresponding tu and 0.1%tw, thevalues of ess% keep much smaller variation. Not surprisingly, appro-priate value of s% often leads to small value of tu and tw.The effects ofthe parameter τ on the control performance for other single-variableand multivariable plants are analyzed in a similar way.
5. Conclusion
In this paper, a novel BCEO-based PID controllers designmethod is proposed for single-variable and multivariable con-trolled plants. The key operations of this method include encodingthe PID parameters into a binary string, evaluating the controlperformance by a more reasonable index than the traditional ones,e.g., IAE and ITAE, and updating the solution based on power-lawprobability distribution. One of the most attractive advantages isthe relative simplicity of BCEO comparing with the existingpopular evolutionary algorithms, such as AGA [32], SOGA [8],and PBPSO [11]. More specially, only selection and mutationshould be designed from the evolutionary algorithms points ofview and fewer adjustable parameters need to be tuned in BCEO.Furthermore, the experimental results on some benchmarkinstances have shown that the proposed BCEO-based PID designmethod is more effective and efficient than AGA, SOGA and PBPSO.Additionally, the experimental results concerning the effects of theparameter τ on the performances of BCEO have indicated therobustness of BCEO for τ. As a consequence, the proposed BCEO is apromising optimization method for the design of PID controllers.Nevertheless, the performances of BCEO may be improved furtherby a highly tailored method concerning the adaptive mechanismof τ or the backbone-based learning algorithm [26]. On the other
Table 3Comparative performances of BCEO with the reported popular evolutionary algorithms for single plant 2.
Algorithm KP KI KD BF s% tu(s) ess% 0.1%tw(s) T(s)
AGA [32] 1.3294 0.1955 4.6921 108.0177 22.97 3.75 0.00 43.20 64.8280SOGA [8] 2.98 0.096 12.7 156.5308 8.45 8.45 0.45 4100 62.7620PBPSO [11] 4.0043 0.0355 10.0 165.4567 11.13 5.70 0.24 4100 125.1520BCEO (τ¼1.3) 1.7986 0.0196 6.3441 92.7998 0.50 7.75 0.00 30.0 41.7960
Table 4The adjustable parameters used in AGA, PBPSO and BCEO for the multivariable plant.
Algorithm Population size Selection pc pm Inertia weight Acceleration factors Vmax Imax lj
AGA [32] 50 – 0.7 0.01 – – – 100 10PBPSO [11] 40 – – – wmax¼0.8 c1¼2.0 50 200 16
wmin¼0.8 c2¼2.0BCEO – τ¼1.3 – – – – – 100 10
Table 5Multivariable PID controller parameters of AGA, PBPSO and BCEO for multivariable plant with decoupler.
Algorithm KP1 KI1 KD1 KP2 KI2 KD2 BF T(s)
AGA [32] 1.2199 0.0616 �0.7048 1.2199 0.3050 �0.6950 103.0780 181.631PBPSO [11] 1.9978 0.1121 �0.5443 1.9990 0.1485 �0.5619 101.5472 212.235BCEO 2.0489 0.1095 �0.4692 2.0489 0.2561 �0.4878 78.6459 120.301
Table 6Comparative performance of BCEO with AGA and PBPSO for multivariable plantwith decoupler.
Algorithm s1% tu1(s) ess1% 0.5%tw1(s) s2% tu2(s) ess2% 0.5%tw2(s)
AGA [32] 0.00 18.0 0.00 30 0.00 17.0 0.31 34.0PBPSO [11] 0.40 11.8 0.02 22 0.60 10.5 0.44 25.0BCEO 2.98 6.0 0.00 11 2.49 4.0 0.27 10.0
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188 185

Fig. 7. Comparison of output y1 (left) and y2 (right) under different algorithms-based PID controllers for multivariable plant with decoupler.
Table 7Multivariable PID controller parameters of AGA, PBPSO and BCEO for multivariable plant without decoupler.
Algorithm KP1 KI1 KD1 KP2 KI2 KD2 BF T(s)
AGA [32] 0.9932 0.1183 0.4018 �0.0068 �0.0068 �0.0068 86.5208 186.266PBPSO [11] 0.9976 0.0025 0.3450 �0.0313 �0.0078 �0.0155 80.6518 223.578BCEO 0.9941 0.0025 0.4057 �0.0059 �0.0059 �0.0059 37.7472 124.469
Table 8Comparative performance of BCEO with AGA and PBPSO for multivariable plant without decoupler.
Algorithm s1% tu1(s) ess1% 0.1%tw1(s) s2% tu2(s) ess2% 0.1%tw2(s)
AGA [32] 11.57 6 0.01 69 8.47 15 0.04 125PBPSO [11] 1.43 5 0.06 58 13.47 9 0.06 56BCEO 1.96 6 0.00 31 1.18 8 0.00 12
Fig. 8. Comparison of output y1 (left) and y2 (right) under different algorithms-based PID controllers for multivariable plant without decoupler.
Table 9The effects of parameter τ on the performances of BCEO for single-variable plant 2.
τ KP KI KD BF s% tu(s) ess% 0.1%tw(s) T(s)
1.10 2.1896 0.2933 6.4614 106.9520 24.12 3.15 0.00 28.60 43.11001.15 1.8768 0.0196 6.1877 94.0765 1.08 7.55 0.09 13.85 42.93701.20 1.7400 0.2346 5.3568 103.8372 23.19 3.35 0.07 27.25 43.10901.25 2.5024 0.0196 8.5826 97.8417 1.20 6.90 0.02 15.75 42.18801.30 1.7986 0.0196 6.3441 92.7998 0.50 7.75 0.00 18.40 41.79601.35 2.5024 0.4301 7.4682 109.8545 28.25 3.00 0.00 22.10 42.56301.40 2.5024 0.0196 8.5826 97.8417 1.20 6.90 0.02 15.75 42.96901.45 2.8152 0.0196 9.4233 101.9073 1.78 6.55 0.04 15.05 42.89001.50 2.5024 8.5142 8.2893 97.8486 1.23 6.85 0.03 15.85 43.6410
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188186

hand, the extension of BCEO to more engineering examples will beanother significant subject of future investigation.
Acknowledgments
The authors gratefully acknowledge the helpful comments andsuggestions of the editor and anonymous reviewers. The authorsalso thank Dr. Menhas for providing consultation on simulation ofPSO-based PID controller. This work was partially supported by theNational Natural Science Foundation of China (Nos. 51207112 and61005049), the Zhejiang Provincial Natural Science Foundation ofChina (No. Y6090220), and the Program of “Xinmiao” (Potential)Talents in Zhejiang Province (No. 2012R424044).
References
[1] K.H. Ang, G. Chong, Y. Li, PID control system analysis, design and technology,IEEE Trans. Control Syst. Technol. 13 (4) (2005) 559–576.
[2] C.F. Hsu, G.M. Chen, T.T. Lee, Robust intelligent tracking control with PID-typelearning algorithm, Neurocomputing 71 (1–3) (2007) 234–243.
[3] J. Ye, Adaptive control of nonlinear PID-based analog neural networks for anonholonomic mobile robot, Neurocomputing 71 (7–9) (2008) 1561–1565.
[4] T. Chaiyatham, I. Ngamroo, A bee colony optimization based-fuzzy logic-PIDcontrol design of electrolyzer for microgrid stabilization, Int. J. InnovativeComput., Inf. Control 8 (9) (2012) 6049–6066.
[5] M.W. Iruthayarajan, S. Baskar, Evolutionary algorithms based design of multi-variable PID controller, Expert Syst. Appl. 36 (2009) 9159–9167.
[6] G.R. Meza, J. Sanchis, X. Blasco, J.M. Herrero, Multiobjective evolutionaryalgorithms for multivariable PI controller design, Expert Syst. Appl. 39 (2012)7895–7907.
[7] W.D. Chang, A multi-crossover genetic approach to multivariable PID con-trollers tuning, Expert Syst. Appl. 33 (2007) 620–626.
[8] J.H. Zhang, J. Zhuang, H.F. Du, S.A. Wang, Self-organizing genetic algorithmbased tuning of PID controllers, Inf. Sci. 179 (2009) 1007–1018.
[9] N.J. Li, W.J. Wang, C.C.J. Hsu, W. Chang, H.G. Chou, J.W. Chang, Enhancedparticle swarm optimizer incorporating a weighted particle, Neurcomputing124 (2014) 218–227.
[10] T.H. Kim, I. Maruta, T. Sugie, Robust PID controller tuning based on constrainedparticle swarm optimization, Automatica 44 (2008) 1104–1110.
[11] M.I. Menhas, L. Wang, M. Fei, H. Pan, Comparative performance analysis ofvarious binary coded PSO algorithms in multivariable PID controller design,Expert Syst. Appl. 39 (2012) 4390–4401.
[12] A. Djoewahir, K. Tanaka, S. Nakashima, Adaptive PSO-based self-tuning PIDcontroller for ultrasonic motor, Int. J. Innovative Comput., Inf. Control 9 (10)(2013) 3903–3914.
[13] L.S. Coelho, M.W. Pessôa, A tuning strategy for multivariable PI and PIDcontrollers using differential evolution with chaotic Zaslavskii map, ExpertSyst. Appl. 38 (2011) 13694–13701.
[14] D. Davendra, I. Zelinka, R. Senkerik, Chaos driven evolutionary algorithms forthe task of PID control, Comput. Math. Appl. 60 (2010) 1088–1104.
[15] S.Z. Zhao, M.W. Iruthayarajan, S. Baskar, P.N. Suganthan, Multi-objective robustPID controller tuning using two lbests multi-objective particle swarm optimi-zation, Inf. Sci. 181 (2011) 3323–3335.
[16] P. Bak, C. Tang, K. Wiesenfeld, Self-organized criticality: an explanation of 1/fnoise, Phys. Rev. Lett. 59 (1987) 381–384.
[17] P. Bak, K. Sneppen, Punctuated equilibrium and criticality in a simple model ofevolution, Phys. Rev. Lett. 71 (24) (1993) 4083–4086.
[18] S. Boettcher, A.G. Percus, Nature's way of optimizing, Artif. Intell. 119 (2000)275–286.
[19] S. Boettcher, A.G. Percus, Optimization with extremal dynamics, Phys. Rev.Lett. 86 (23) (2001) 5211–5214.
[20] S. Boettcher, A.G. Percus, Extremal optimization for graph partitioning, Phys.Rev. E 64 (2) (2001) 026114.
[21] S. Boettcher, A.G. Percus, Extremal optimization at the phase transition for thethree-coloring problem, Phys. Rev. E 69 (2004) 066703.
[22] Y.W. Chen, Y.Z. Lu, P. Chen, Optimization with extremal dynamics for thetravelling salesman problem, Physica A 385 (2007) 115–123.
[23] J.M. Liu, Y.W. Chen, G.K. Yang, Y.Z. Lu., Self-organized combinatorial optimiza-tion, Expert Syst. Appl. 38 (2011) 10532–10540.
[24] M.B. Menaï, M. Batouche, An effective heuristic algorithm for the maximumsatisfiability problem, Appl. Intell. 24 (2006) 227–239.
[25] G.Q. Zeng, Y.Z. Lu, W.J. Mao, Modified extremal optimization for the maximumsatisfiability problem, J. Zhejiang Univ.-Sci. C 12 (7) (2011) 589–596.
[26] G.Q. Zeng, Y.Z. Lu, Y.X. Dai, Z.G. Wu, W.J. Mao, Z.J. Zhang, C.W. Zheng, Backboneguided extremal optimization for the hard maximum satisfiability problem,Int. J. Innovative Comput., Inf. Control 8 (12) (2012) 8355–8366.
[27] F.L. Sousa, V. Vlassov, F.M. Ramos, Generalized extremal optimization: anapplication in heat pipe design, Appl. Math. Model. 28 (2004) 911–931.
[28] Y.W. Chen, Y.Z. Lu, G.K. Yang, Hybrid evolutionary algorithm with marriage ofgenetic algorithm and extremal optimization for production scheduling, Int. J.Adv. Manuf. Technol. 36 (9–10) (2008) 959–968.
[29] S. Boettcher, Evolutionary dynamics of extremal optimization, Lect. NotesComput. Sci. 5581 (2009) 1–14.
[30] G.Q. Zeng, Y.Z. Lu, Survey on computational complexity with phase transitions andextremal optimization, in: Proceedings of the 48th IEEE Conferenceon Control and Decision & 28th Chinese Control Conference, 2009, pp. 4352–4359.
[31] H.B. Huo, X.J. Zhu, G.Y. Cao, Design for two-degree-of-freedom PID regulatorbased on improved generalized extremal optimization algorithm, J. ShanghaiJiaotong Univ. (Sci.) E-12 (2) (2007) 148–153.
[32] J. Zhang, S.H.H. Chung, W.L. Lo, Clustering-based adaptive crossover and mutationprobabilities for genetic algorithms, IEEE Trans. Evolut. Comput. 11 (2007)326–335.
[33] G.Q. Zeng, Y.Z. Lu, W.J. Mao, J. Chu, Study on probability distributionsfor evolution in modified extremal optimization, Physica A 389 (2010) 1922–1930.
[34] Q.G. Wang, B. Zou, T.H. Lee, B. Qiang, Auto-tuning of multivariable PID controllersfrom decentralized relay feedback, Automatica 33 (3) (1997) 319–330.
Guo-Qiang Zeng received the Ph.D. degree in ControlScience and Engineering from the Zhejiang University,China, in 2011. He is currently a lecturer at the WenzhouUniversity, China. He has published over 20 journal andconference papers. He has been awarded an NSFC projecton intelligent optimization and control for mircogrid. Hisresearch interests include computational intelligence,intelligent control, mircogrid, power electronics, etc.
Kang-Di Lu is currently an undergraduate at the Depart-ment of Electrical and Electronic Engineering, WenzhouUniversity, China. His research interests include evolu-tionary computation, intelligent control, etc.
Yu-Xing Dai received his Ph.D. degree in Control Theoriesand Control Engineering from the Central South University,China, in 2003. He is currently a professor at the WenzhouUniversity, China. He has headed various national andindustrial projects, and received 10 ministerial and pro-vincial awards. His research interests include power elec-tronics and its applications, computer numericallycontrolled machine tools, mircogrid, etc.
Fig. 9. The adjustable parameter τ vs. the step response for single-variable plant 2.
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188 187

Zheng-Jiang Zhang received the Ph.D. degree in Con-trol Science and Engineering from the Zhejiang Uni-versity, China, in 2010. He is currently a lecturer at theWenzhou University, China. He has published over 20journal and conference papers. His research interestsinclude data reconciliation, parameter estimation, pro-cess control, optimization, etc.
Min-Rong Chen received her Ph.D. degree from theDepartment of Automation, Shanghai Jiao Tong Uni-versity, China, in 2008. She is currently an associateprofessor at the College of Information Engineering,Shenzhen University, China. She has published over 20journal and conference papers. She has been awardedan NSFC project on multiobjective optimization. Herresearch interests include evolutionary computation,multiobjective optimization, etc.
Chong-Wei Zheng is currently a professor at theWenzhou University, China. His research interestsinclude power electronics and its applications, photo-electric information processing, etc.
Di Wu received his bachelor's degree in the ElectricalEngineering and its Automation from the ShenyangUniversity of Chemical Technology, China, 2013. He iscurrently a candidate for a Master's at the WenzhouUniversity. His research interests include mircogrid,intelligent control, etc.
Wen-Wen Peng is currently an undergraduate in theDepartment of Electrical and Electronic Engineering,Wenzhou University, China. Her research interests includeevolutionary computation, intelligent control, etc.
G.-Q. Zeng et al. / Neurocomputing 138 (2014) 180–188188