binary classification problem learn a classifier from the training set given a training dataset main...
Post on 21-Dec-2015
214 views
TRANSCRIPT

Binary Classification ProblemLearn a Classifier from the Training Set
Given a training dataset
Main goal: Predict the unseen class label for new data
xi 2 A+ , yi = 1 & xi 2 Aà , yi = à 1
S = f (xi;yi)ììxi 2 Rn;yi 2 f à 1;1g;i = 1;. . .;mg
Find a function by learning from data f : Rn ! R
f (x) > 0) x 2 A+ and f (x) < 0) x 2 Aà
The simplest function is linear: f (x) = w0x + b

Binary Classification ProblemLinearly Separable Case
A-
A+
x0w+ b= à 1
wx0w+ b= + 1x0w+ b= 0
Malignant
Benign

Support Vector MachinesMaximizing the Margin between Bounding Planes
A+
A-
x0w+ b= 1
x0w+ b= à 1
Why We Maximize the Margin?(Based on Statistical Learning Theory)
The Structural Risk Minimization (SRM):
The expected risk will be less than or equal toempirical risk (training error)+ VC (error) bound
íí w
íí
2 / VC bound
minVC bound , min21íí w
íí 2
2 , maxMargin
Summary the Notations
Let S = f (x1;y1); (x2;y2); . . .(xm;ym)gbe a training dataset and represented by matrices
A =
(x1)0
(x2)0...
(xm)0
2
64
3
75 2 Rmâ n; D =
y1 ááá 0......
...0 ááá ym
" #
2 Rmâ m
e= [1;1; . . .;1]02 Rm:D(Aw+ eb)>e, where
A iw+ b > + 1; for D ii = + 1;A iw+ b 6 à 1; for D ii = à 1
equivalent to
Support Vector Classification(Linearly Separable Case, Primal)
the minimization problem:
The hyperplane is determined by solving (w;b)
min(w;b)2R n+1
21 jjwjj22
D(Aw+ eb)>e;
It realizes the maximal margin hyperplane withgeometric margin í = jjwjj2
1
Support Vector Classification(Linearly Separable Case, Dual Form)
The dual problem of previous MP:
maxë2R l
e0ë à 21ë0DAA0Dë
subject to
e0Dë = 0; ë>0:Applying the KKT optimality conditions, we have
w = A0Dë. But where isb?
06ë ? D(Aw+ eb) à e>0Don’t forget

Dual Representation of SVM(Key of Kernel Methods: )
The hypothesis is determined by (ëã;bã)
h(x) = sgn(êx;A0Dëã
ë+ bã)
= sgn(P
i=1
l
yiëãi
êxi;x
ë+ bã)
= sgn(P
ëãi >0
yiëãi
êxi;x
ë+ bã)
w = A0Dëã =P
i=1
`yiëã
i A0i
Remember : A0i = xi
Soft Margin SVM(Nonseparable Case)
If data are not linearly separable Primal problem is infeasible Dual problem is unbounded above
Introduce the slack variable for each training point
yi(w0xi + b)>1à øi; øi>0 8 i The inequality system is always feasible
w = 0; b= 0 & ø= ee.g.

xj
x
x
x
x
x
x
x
x
o
o
o
o
o
o
o
oi
í
í
øj
øi

D(Aw+ eb) >e+ øø>0
whereø: nonnegative slack (error) vector
The term e0ø , 1-norm measure of error vector, is
called the training error.
minw;b;ø
e0ø
s.t. (LP)
Robust Linear ProgrammingPreliminary Approach to SVM
For the linearly separable case, at solution of (LP):
ø= 0

min(w;b;ø)2R n+1+l
21jjwjj22 + 2
Cjjøjj22
D(Aw+ eb) + ø>e
2-Norm Soft Margin:
1-Norm Soft Margin (Conventional SVM):
min(w;b;ø)2R n+1+l
21jjwjj22 + Ce0ø
D(Aw+ eb) + ø>e
ø> 0
Support Vector Machine Formulations(Two Different Measures of Training Error)

Tuning ProcedureHow to determine C?
overfitting
The final value of parameter is one with the maximum testing set correctness !
C
Lagrangian Dual Problem
subject to
subject to
where

1-Norm Soft Margin SVM Dual Formulation
The Lagrangian for 1-norm soft margin:
L (w;b;ø;ë;r) = 21w0w+ Ce0ø+
ë0[eà D(Aw+ eb) à ø]à r0øwhere ë>0 & r>0
The partial derivatives with respect to primalvariables equal zeros
@w@L (w;b;ø;ë) = wà A0Dë = 0
@b@L (w;b;ø;ë) = e0Dë = 0;
@ø@L (w;b;ø;ë) = Ceà ë à r = 0
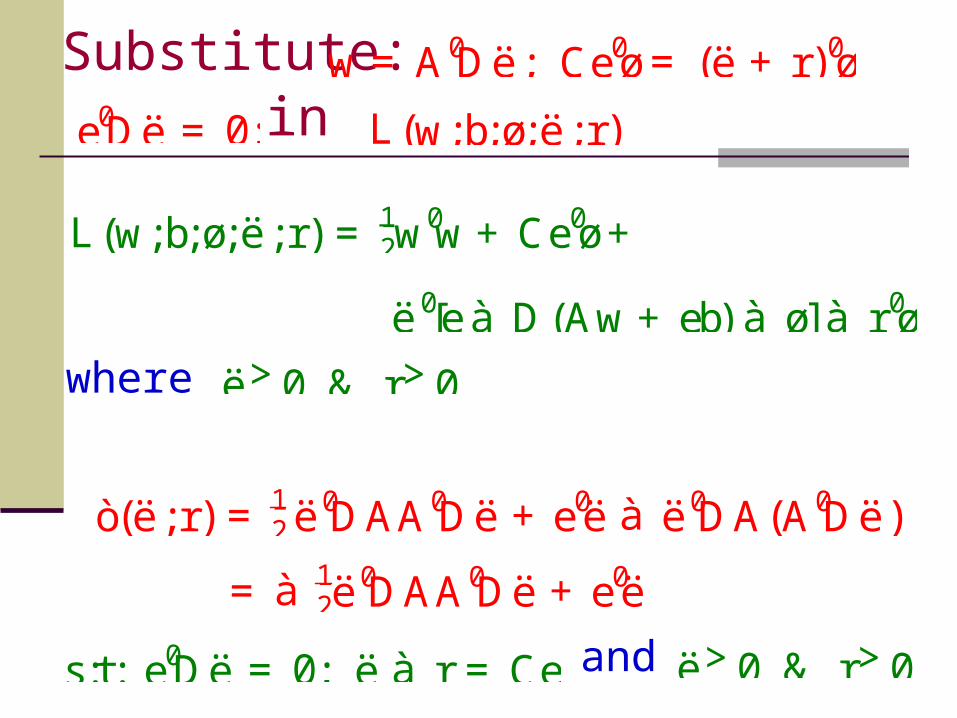
Substitute:
L (w;b;ø;ë;r) = 21w0w+ Ce0ø+
ë0[eà D(Aw+ eb) à ø]à r0ø
where ë>0 & r>0
w = A0Dë; Ce0ø= (ë + r)0ø
in L(w;b;ø;ë;r)e0Dë = 0;
ò(ë;r) = 21ë0DAA0Dë + e0ë à ë0DA(A0Dë)
= à 21ë0DAA0Dë + e0ë
s:t: e0Dë = 0; ë à r = Ce ë>0 & r>0and

Dual Maximization Problemfor 1-Norm Soft Margin
Dual:
0 6 ë 6 Ce
maxë2R l
e0ë à 21ë0DAA0Dë
e0Dë = 0
The corresponding KKT complementarity:
06ë ? D(Aw+ eb) + øà e>0
06ø ? ë à Ce60

Slack Variables for 1-Norm Soft Margin SVM
Non-zero slack can only occur when ëãi = C
The points for which 0< ëãi < C lie at the
bounding planes This will help us to find bã
The contribution of outlier in the decision
rule will be at most C The trade-off between accuracy and
regularization directly controls by C
f (x) =P
ëãi >0
yiëãi
êxi;x
ë+ bã

Two-spiral Dataset(94 White Dots & 94 Red Dots)

Learning in Feature Space(Could Simplify the Classification Task)
Learning in a high dimensional space could degrade
generalization performance This phenomenon is called curse of dimensionality
By using a kernel function, that represents the innerproduct of training example in feature space, we never need to explicitly know the nonlinear map.
Even do not know the dimensionality of feature space There is no free lunch
Deal with a huge and dense kernel matrix
Reduced kernel can avoid this difficulty

X Fþ
þ( ) þ( )
þ( )þ( )
þ( )
þ( )
þ( )þ( )

f (x) =ð P
j=1
?
wjþj(x)ñ
+ b
Linear Machine in Feature Space
Let þ : X ! Fbe a nonlinear map from the
input space to some feature space
The classifier will be in the form (Primal):
Make it in the dual form:
f (x) =ð P
i=1
lë iyi
êþ(xi) áþ(x)
ëñ+ b

K (x;z) =êþ(x) áþ(z)
ë
Kernel: Represent Inner Product in Feature Space
The classifier will become:
f (x) =ð P
i=1
lë iyiK (xi;x)
ñ+ b
Definition: A kernel is a functionK : X â X ! Rsuch thatfor all x;z 2 X
where þ : X ! F

A Simple Example of KernelPolynomial Kernel of Degree 2: K (x;z) =
êx;z
ë2
Let x = x1
x2
ô õ
;z = z1
z2
ô õ2 R2 and the nonlinear map
þ : R27! R3 defined by þ(x) =x2
1
x22
2p
x1x2
2
4
3
5.
Thenêþ(x);þ(z)
ë=
êx;z
ë2= K (x;z).
There are many other nonlinear maps, (x), that
satisfy the relation:ê (x); (z)
ë=
êx;z
ë2= K (x;z)

Power of the Kernel Technique
Consider a nonlinear map þ : Rn7! Rp that consists
of distinct features of all the monomials of degree d.
Then p = n + dà 1d
ð ñ.
For example: n = 11; d = 10; p = 92378
Is it necessary? We only need to know êþ(x);þ(z)
ë!
This can be achieved
K (x;z) =êx;z
ëd
x31x
12x
43x
44 ) â î î î â î â î î î î â î î î î
The value of kernel function represents the inner product of two training points in feature space
Kernel functions merge two steps
1. map input data from input space to feature space (might be infinite dim.) 2. do inner product in the feature space
Kernel TechniqueBased on Mercer’s Condition (1909)

More Examples of Kernel
K (A;B) : Rmâ n â Rnâ l 7à! Rmâ l
A 2 Rmâ n;a 2 Rm;ö 2 R; d is an integer:
Polynomial Kernel :(AA0+ öaa0)dï
)(Linear KernelAA0: ö = 0;d = 1
Gaussian (Radial Basis) Kernel:
"à ökA ià A jk22; i; j = 1;. . .;mK (A;A0)ij =
Theij -entry of K (A;A0) represents the “similarity” of data points A i A jand

Nonlinear 1-Norm Soft Margin SVMIn Dual Form
Linear SVM:
0 6 ë 6 Ce
maxë2R l
e0ë à 21ë0DAA0Dë
e0Dë = 0
Nonlinear SVM:maxë2R l
e0ë à 21ë0DK (A;A0)Dë
0 6 ë 6 Ce
e0Dë = 0

1-norm Support Vector MachinesGood for Feature Selection
C > 0 Solve the quadratic program for some :min Ce0ø+ kwk1
D(Aw+ eb) + ø>eø>0;w;b
s. t. ,, denoteswhere D ii = æ1 A+ Aàor membership.
Equivalent to solve a Linear Program as follows: min
ø>0;w;b;s Ce0ø+ e0s
D(Aw+ eb) + ø>e
à s6w6s

SVM as an Unconstrained Minimization Problem
Hence (QP) is equivalent to the nonsmooth SVM:
minw;b2
C k(eà D(Aw+ eb))+k22 + 2
1(kwk22 + b2)
2C køk2
2+ 21(kwk2
2+ b2)
D(Aw+ eb) + ø>eø>0;w;bmin
s. t.(QP)
Change (QP) into an unconstrained MP
Reduce (n+1+m) variables to (n+1) variables
At the solution of (QP):
where (á)+ = maxf á;0gø= (eà D(Aw+ eb))+
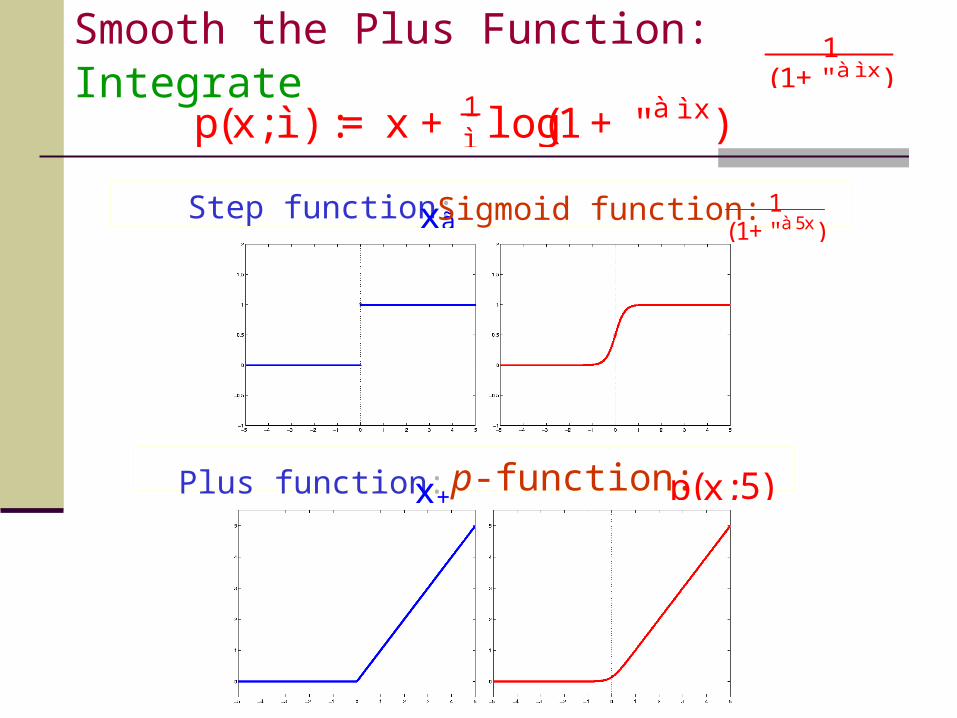
Smooth the Plus Function: Integrate
Step function: xã Sigmoid function:(1+"à 5x)
1
Plus function: x+ p-function: p(x;5)
(1+"à ì x)1
p(x; ì ) := x + ì1 log(1+ "à ì x)

SSVM: Smooth Support Vector Machine
(á)+
Replacing the plus function in the nonsmooth SVM by the smooth p(á; ì ), gives our SSVM:
ìnonsmooth SVM as goes to infinity. The solution of SSVM converges to the solution of
ì = 5(Typically, )
min(w;b) 2 Rn+12
Ckp((eà D(Aw+ eb)); ì )k22 + 2
1(kwk22 + b2)
Newton-Armijo Method: Quadratic Approximation of SSVM
At each iteration we solve a linear system of:
n+1 equations in n+1 variables Complexity depends on dimension of input space
Converges in 6 to 8 iterations
(wi;bi)è é
generated by solving a The sequence
(wã;bã)quadratic approximation of SSVM, converges to the
of SSVM at a quadratic rate.unique solution
It might be needed to select a stepsize

Newton-Armijo Algorithm
Start with any (w0;b0) 2 Rn+1. Having(wi;bi);
stop if r Ðì (wi;bi) = 0; else : (i) Newton Direction :
r 2Ðì (wi;bi)di = à r Ðì (wi;bi)0
(ii) Armijo Stepsize :
(wi+1;bi+1) = (wi;bi) + õidi
õi 2 f1;21;4
1; :::g
globally and globally and quadraticallquadratically converge ty converge to unique solo unique solution in a finiution in a finite number of te number of stepsstepssuch that Armijo’s rule is satisfied
Ðì (w;b) = 2Ckp((eà D(Aw+ eb)); ì )k2
2+ 21(kwk2
2+ b2)

Nonlinear Smooth SVM K (x0;A0)Dë + b= 0
K (A;A0) ReplaceAA0by a nonlinear kernel :
2Ckp(eà D(K (A;A0)Dë + eb; ì )k2
2+ 21(këk2
2 + b2)ë;bmin
Use Newton-Armijo algorithm to solve the problem
Each iteration solves m+1 linear equations in m+1 variables
Nonlinear classifier depends on the data points with nonzero coefficients :K (x0;A0)Dë + b=
P
ë j>0ë jyjK (A j ;x) + b= 0
Nonlinear Classifier:

Conclusion
SSVM: A new formulation of support vector machine as a smooth unconstrained minimization problem
No optimization (LP, QP) package is needed
Can be solved by a fast Newton-Armijo algorithm
An overview of SVMs for classification
There are many important issues did not address this lecture such as:
How to solve conventional SVM?
How to deal with massive datasets?
How to select parameters: C & ö
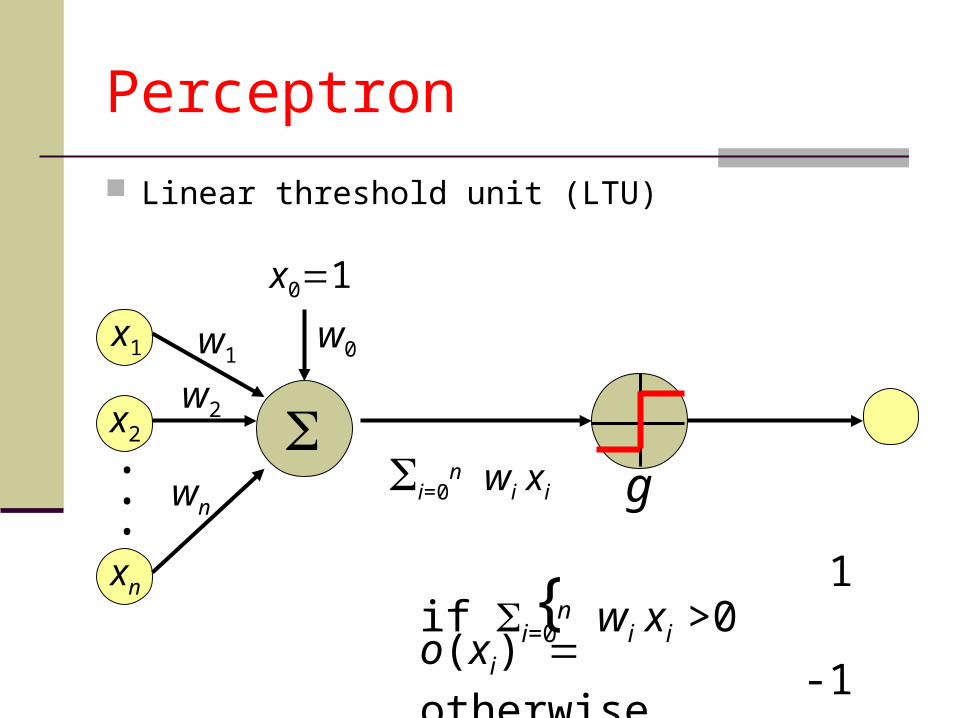
Perceptron
Linear threshold unit (LTU)
x1
x2
xn
.
..
w1
w2
wn
w0
x01
i=0n wi xi
1 if i=0n wi xi >0
o(xi) -1 otherwise{
g

Possibilities for function g
Step functionSign function Sigmoid (logistic) function
step(x) = 1, if x > threshold 0, if x threshold(in picture above, threshold = 0)
sign(x) = +1, if x > 0
-1, if x 0sigmoid(x) = 1/(1+e-x)
Adding an extra input with activation x0 = 1 and weightwi, 0 = -T (called the bias weight) is equivalent to having a threshold at T. This way we can always assume a 0 threshold.
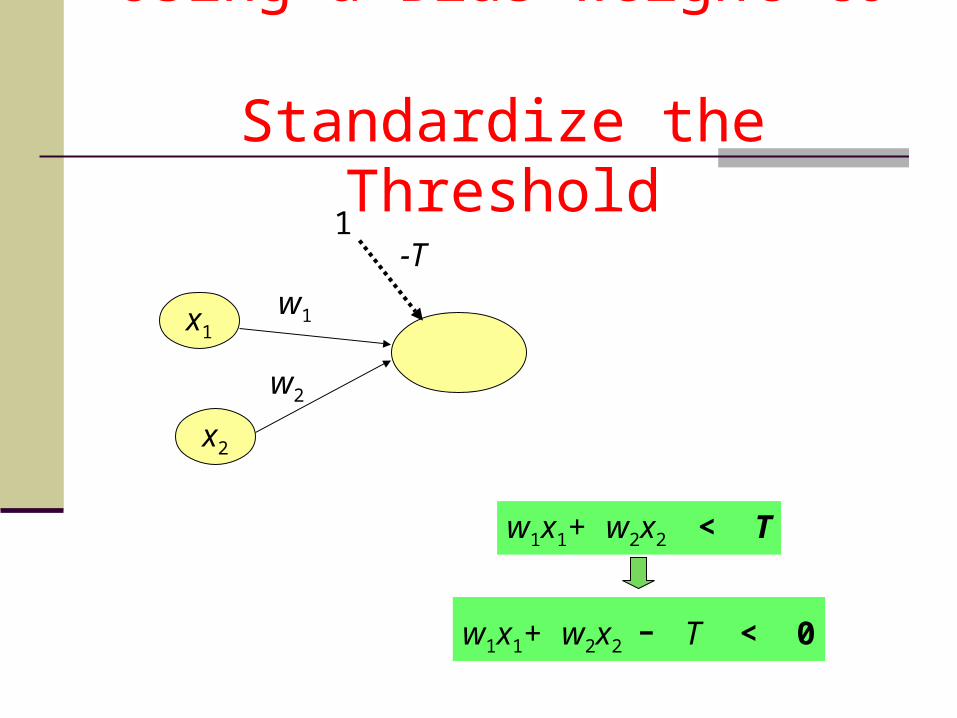
Using a Bias Weight to Standardize the Threshold
1-T
x1
x2
w1
w2
w1x1+ w2x2 < T
w1x1+ w2x2 - T < 0

Perceptron Learning Rule
t = 1
o=1
o=-1
w = [0.2 0.2 0.2]
w = [0.25 –0.1 0.5]x2 = 0.2 x1 – 0.5
t = -1
(x, t)=([-1,-1], 1)o = sgn(0.25+0.1-0.5) =1w = [0.2 –0.2 –0.2]w = [0.2 –0.4 –0.2]
(x, t)=([2,1], 1)o =sgn(0.45-0.6+0.3) =1(x, t)=([1,1], 1)o = sgn(0.250.7+0.1) = 1
x1 x1
x1 x1
x2 x2
x2 x2
-0.5x1+0.3x2+0.45>0 o = 1
The Perceptron Algorithm Rosenblatt, 1956
Given a linearly separable training set andSñ > 0learning rate and the initial weight vector,
bias: and letw0 = 0; b0 = 0
R = max16 i6 `
jjxijj; k = 0:
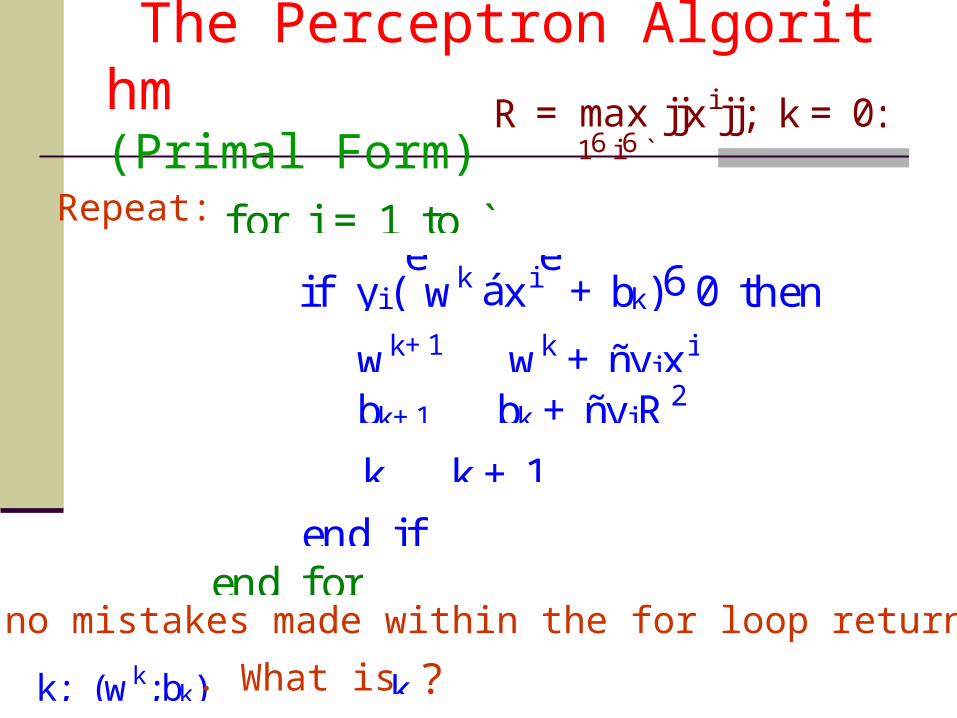
The Perceptron Algorithm (Primal Form)
Repeat: for i = 1 to `
if yi(êwk áxi
ë+ bk)60 then
wk+1 wk + ñyixi
bk+1 bk + ñyiR2
k k + 1end if
until no mistakes made within the for loop return:end for
k; (wk;bk) . What is k ?
R = max16 i6 `
jjxijj; k = 0:

wk+1 wk + ñyixi and bk+1 bk + ñyiR2
yi
àêwk+1 áxi
ë+ bk+1
á> yi
àêwk áxi
ë+ bk
á?
yiàê
wk+1 áxië
+ bk+1á
= yiàê
wk áxië
+ bká
+ ñàê
xi áxië
+ R2á
= yiàê
(wk + ñyixi) áxië
+ bk + ñyiR2á
= yiàê
wk áxië
+ bká
+ yiàñyi
êxi áxi
ë+ R2
á

The Perceptron Algorithm ( STOP in Finite Steps )
Theorem (Novikoff)
SLet be a non-trivial training set, and letR = max16i6`
jjxijj2:
Suppose that there exists a vector wopt 2 Rn; jjwoptjj = 1
and yi(êwopt áxi
ë+ bopt)>í ;8 16 i6 .̀ Then the number
of mistakes made by the on-line perceptron algorithmSon is at most ( í
2R)2:
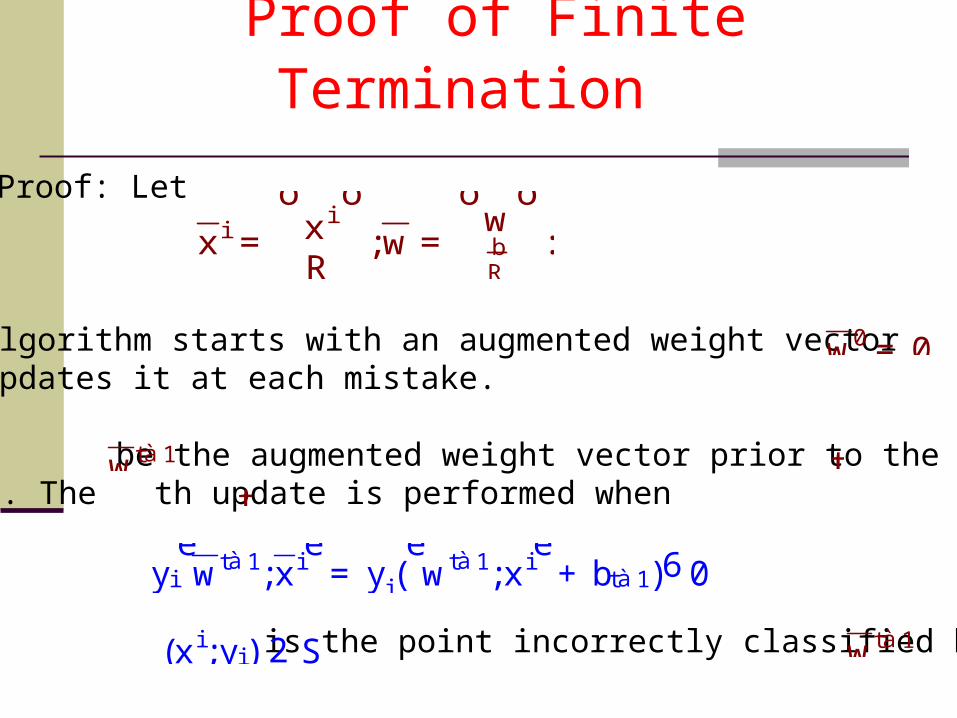
Proof of Finite Termination
Proof: Let
xi = xi
R
ô õ;w =
w
Rb
ô õ:
The algorithm starts with an augmented weight vector and updates it at each mistake.
w0 = 0
Let be the augmented weight vector prior to the th mistake. The th update is performed when
wtà 1
tt
yiêwtà 1;xi
ë= yi(
êwtà 1;xi
ë+ btà 1)60
where is the point incorrectly classified by . (xi;yi) 2 S wtà 1

Update Rule of Perceotron wt wtà 1 + ñyixi ;bt bt + ñyiR2
wt =wt
Rbt
ô õ=
wtà 1
Rbtà 1
ô õ+ ñyi
xi
R
ô õ= wtà 1 + ñyixi:
êwt;wopt
ë=
êwtà 1;wopt
ë+ ñyi
êxi;wopt
ë
>êwtà 1;wopt
ë+ ñí >
êwtà 2;wopt
ë+ 2ñí . . . > tñí
(NOTE : yi(êwopt áxi
ë+ bopt)>í ;8 16 i6 )̀
Similarly,jjwtjj22 = jjwtà 1jj22 + 2ñyi
êwtà 1;xi
ë+ ñ2jjxijj22
6 jjwtà 1jj22 + ñ2jjxijj22 = jjwtà 1jj22 + ñ2(jjxijj22 + R2)
6 jjwtà 1jj22 + 2ñ2R2 6 ááá6 2tñ2R2
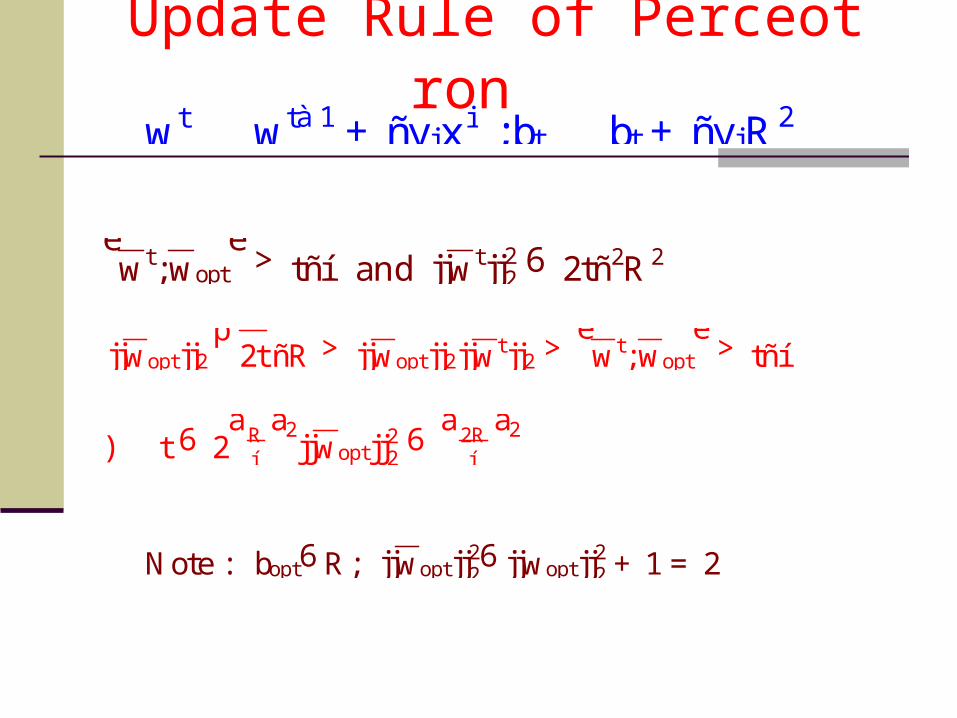
Update Rule of Perceotron wt wtà 1 + ñyixi ;bt bt + ñyiR2
êwt;wopt
ë> tñí and jjwtjj22 6 2tñ2R2
jjwoptjj2 2tp
ñR > jjwoptjj2jjwtjj2 >êwt;wopt
ë> tñí
) t 6 2à
íR
á2jjwoptjj22 6
àí
2Rá2
Note : bopt6R; jjwoptjj226 jjwoptjj22 + 1= 2

The Perceptron Algorithm (Dual Form)
Given a linearly separable training set andS
ë = 0; ë 2 R l ;b= 0;R = max16i6 l jjxijj
w =P
i=1l ë iyixi
Repeat: for i = 1 to l
if yi(P
j=1
l
ë jyjêxj áxi
ë+ b)60 then
ë i ë i + 1; b b+ yiR2
end if
until no mistakes made within the for loop return:
end for
(ë;b)

What We Got in the Dual Form Perceptron Algorithm?
The number of updates equals:P
i=1
l
ë i = jjëjj1 6 ( í2R)2
ë i > 0implies that the training point(xi;yi)has been
misclassified in the training process at least once.
ë i = 0implies that removing the training point(xi;yi)will not affect the final results
The training data only appear in the algorithm through the entries of the Gram matrix, which is defined below:G 2 R lâ l
Gi j =êxi;xj
ë