bees algorithm for interference suppression of linear antenna arrays by controlling the phase-only...
TRANSCRIPT

Expert Systems with Applications 37 (2010) 3129–3135
Contents lists available at ScienceDirect
Expert Systems with Applications
journal homepage: www.elsevier .com/locate /eswa
Bees algorithm for interference suppression of linear antenna arraysby controlling the phase-only and both the amplitude and phase
K. Guney a,*, M. Onay b
a Department of Electrical and Electronics Engineering, Faculty of Engineering, Erciyes University, 38039 Kayseri, Turkeyb Department of Aircraft Electrical and Electronics, Civil Aviation School, Erciyes University, 38039 Kayseri, Turkey
a r t i c l e i n f o
Keywords:Antenna arrayPattern nullingBees algorithmPattern synthesis
0957-4174/$ - see front matter � 2009 Elsevier Ltd. Adoi:10.1016/j.eswa.2009.09.072
* Corresponding author. Tel.: +90 352 437 57 55; fE-mail addresses: [email protected] (K. Gune
(M. Onay).
a b s t r a c t
In this paper, bees algorithm (BA) has been used for null steering in the antenna radiation pattern by con-trolling the phase-only and the complex weights (both the amplitude and phase) of the array elements.The BA is an optimization algorithm inspired by the behavior of the honey bees to find the optimal way ofharvesting food resources around the hive. Simulation results for Chebyshev patterns with the imposedsingle, multiple and broad nulls are given to show the effectiveness of the proposed method. The sensi-tivity of the nulling patterns due to small variations of the element phases is also investigated.
� 2009 Elsevier Ltd. All rights reserved.
1. Introduction
Due to the increasing pollution of the electromagnetic environ-ment, the antenna array, which allows placing nulls in the far fieldpattern at prescribed directions, is becoming important in commu-nication systems, sonar, and radar applications for maximizing sig-nal-to-interference ratio. The antenna array pattern null formingand steering methods available in the literature (Akdagli & Guney,2004; Akdagli, Guney, & Karaboga, 2002; Babayigit, Akdagli, &Guney, 2006; Er, 1990; Guney & Akdagli, 2001; Guney & Babayigit,2008; Guney, Babayigit, & Akdagli, 2007, 2008; Guney & Basbug,2008a, 2008b; Guney & Onay, 2007a, 2007b, 2008; Haupt, 1997;Ismail & Dawoud, 1991; Khodier & Christodoulou, 2005; Karaboga,Guney, & Akdagli, 2002, 2004; Liao & Chu, 1997; Mailloux, 1994;Shore, 1984; Tennant, Dawoud, & Anderson, 1994; Yang, Gan, &Qing, 2004), varying in accuracy and computational effort, includecontrolling the amplitude-only, the phase-only, the position-only,and the complex weights of the array elements. These methodshave been used with their own benefits and limitations. In spiteof the large variety of nulling methods, it appears that none ofthem completely satisfies the requirement of a general and flexiblesolution for the pattern synthesis problem.
The problem of phase-only nulling is inherently nonlinear and itcannot be solved directly by an analytical method. By assumingthat the phase perturbations are small, the nulling equations canbe linearized. The phase-only control utilizes the phase shifters.The array pattern nulling with phase-only control has been attrac-tive for the phased antenna arrays because it is less complicated
ll rights reserved.
ax: +90 352 437 57 84.y), [email protected]
and the required controls are available at no extra cost. Moreover,it is also easier to control main beam direction by controlling thephase weights instead of controlling the amplitude weights. Inter-ference suppression with complex weights is the most effectivesince it has the larger solution alternatives. However, it is alsothe most expensive considering the cost of the controllers usedfor phase shifters and variable attenuators for each array element.
It is well known that the classical optimization techniques arelikely to be stuck in local minima if the initial guesses are not rea-sonably close to the final solution. The most of the classical optimi-zation techniques and analytical approaches also suffer from thelack of producing flexible solutions for a given antenna patternnulling problem. In recent years, the methods (Akdagli & Guney,2004; Akdagli et al., 2002; Babayigit et al., 2006; Guney & Akdagli,2001; Guney & Babayigit, 2008; Guney & Basbug, 2008a, 2008b;Guney et al., 2007, 2008; Haupt, 1997; Karaboga et al., 2002,2004; Khodier & Christodoulou, 2005; Liao & Chu, 1997; Tennantet al., 1994; Yang et al., 2004) based on the genetic algorithm,ant colony optimization, bacterial foraging, immune, particleswarm optimization, differential evolution, tabu search and clonalselection algorithms have become more popular, and they havebeen used in solving antenna array pattern nulling problems. Theperformances of these methods are found to be better than thoseof the classical optimization techniques and the conventional ana-lytical techniques. Each of these methods has its specific advanta-ges and disadvantages.
In this paper, an efficient method based on the BA (Pham, Koc,Ghanbarzadeh, & Otri, 2006; Pham, Otri, Ghanbarzadeh, Koc,2006; Pham, Ghanbarzadeh, et al., 2006; Pham, Soroka et al.,2006) is presented to steer the single, multiple and broad nullsto the directions of interference by controlling the phase-onlyand both the amplitude and phase of each array element. The

3130 K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135
sensitivity of the phase-only nulling by using the BA is also inves-tigated by rounding the element phase values of the nulling pat-terns to the second decimal position.
The BA (Pham, Ghanbarzadeh et al., 2006; Pham, Koc et al.,2006; Pham, Otri et al., 2006; Pham, Soroka et al., 2006) is a re-cently developed parameter optimization algorithm that is in-spired by the natural foraging behavior of honey bees to find thebest solution of a given optimization problem. The BA has beendemonstrated to exhibit a more robust performance compared tothe other intelligent optimization methods for a variety of complexproblems. The results obtained by Pham, Ghanbarzadeh et al.(2006) for multi-modal functions in n-dimensions reveal that theBA offers remarkable robustness generating a 100% success rate.The BA achieved a successful convergence to the maximum or min-imum without getting trapped at local optima. It was demon-strated by Pham, Ghanbarzadeh et al. (2006) that the BAgenerally yielded superior performance over other techniquesincluding the deterministic simplex method, the stochastic simu-lated annealing optimization, the genetic algorithm and the antcolony system in terms of the speed of optimization and the accu-racy of the results. The BA was successfully utilized to train thelearning vector quantization (LVQ) and the multi-layered percep-tron (MLP) neural networks for control chart pattern recognition(Pham, Koc et al., 2006; Pham, Otri et al., 2006). In spite of the highdimensionality of these problems, the classifiers obtained by usingthe BA are more accurate than those obtained by the standard LVQtraining algorithm and the backpropagation algorithm. An applica-tion of the BA to the optimization of neural networks for the iden-tification of defects in wood veneer sheets was also presented byPham, Soroka et al. (2006). The BA was used to train multi-layerperceptron neural networks to model the inverse kinematics ofan articulated robot manipulator arm (Pham, Castellani, & Fahmy,2008). The results obtained using the BA were compared to the re-sults obtained using the backpropagation algorithm and an evolu-tionary algorithm. The comparative study (Pham et al., 2008)highlights the superior performance of the BA over the other algo-rithms. It was emphasized by Pham, Soroka et al. (2006) and Pham,Ghanbarzadeh et al. (2006) that the swarm-based optimizationalgorithms (Bonabeau, Dorigo, & Theraulaz, 1999; Camazineet al., 2003; Frisch, 1976; Seeley, 1996) with names suggestive ofpossibly bee-inspired operations do not closely follow the behaviorof the bees. In particular, they do not seem to imitate the tech-niques that bees perform when harvesting for food.
In our previous works (Guney & Onay, 2007a, 2007b), the BA hasbeen applied to solve the pattern nulling problem of the linear an-tenna arrays by amplitude-only control and position-only control, andsuccessful results were obtained. However, in this paper, the BA isused for the pattern nulling of linear arrays by controlling thephase-only and both the amplitude and phase. Furthermore, the BAused here employs an adaptive mechanism for producing neighbor-hoods. Therefore, the neighborhood production mechanism of theproposed BA is different from that of the BA proposed by Pham, Sor-oka et al. (2006), Pham, Ghanbarzadeh et al. (2006), Pham, Koc et al.(2006) and Pham, Otri et al. (2006). Guney and Onay (2008) alsoused the BA to design reconfigurable dual-beam linear antenna ar-rays with digital attenuators and digital phase shifters.
The next section briefly explains the formulation of the prob-lem. The basic principles of the BA are presented in the followingsection. The numerical examples are then presented and conclu-sion is made.
2. Formulation
If the elements are symmetrically placed and conjugate-sym-metrically excited about the center of a linear array, the far field ar-
ray factor of this array with an even number (2N) of isotropicelements can be written as:
FðhÞ ¼ 2XN
n¼1
an cos2pk
dn sin hþ dn
� �ð1Þ
where dn is the distance between position of the nth element andthe array center, h is scanning angle from broadside, and an and dn
are amplitude and phase weights of the nth element, respectively.Generally, the main beam of the array pattern is required to be di-rected to the desired signal and the undesired interference signalsfrom other directions to be suppressed as much as possible. To findan appropriate set of required element excitations that achieveinterference suppression, the BA is used to minimize the followingcost function:
C ¼X90�
h¼�90�WðhÞjFoðhÞ � FdðhÞj ð2Þ
where Fo(h) and Fd(h) are, respectively, the pattern obtained byusing BA and the desired pattern. W(h) is included in the cost func-tion to control the null depth level. The value of W(h) should be se-lected by experience such that the cost function is capable ofguiding potential solutions to obtain satisfactory array pattern per-formance with desired properties. The factor W(h) gives the antennadesigner greater flexibility and control over the actual pattern.
3. Bees algorithm
3.1. Bees foraging process in nature
A bee colony can be considered as a distributed creature thatcan extend itself in order to make use of a large number of foodsources at long distances in multiple directions (Frisch, 1976; See-ley, 1996). The colony attempts to attain the most optimal use ofcolony members by recruiting more bees for visiting flower areaswith more nectar and pollen that can be carried to the hive withless effort than the areas with less nectar and pollen (Bonabeauet al., 1999; Camazine et al., 2003).
The food search process is initiated by despatching the scoutbees from the colony to look for and then evaluate potential flowerpatches around the hive. During a harvesting season, a certain pro-portion of the bees in the colony is kept as the scout bees and thesebees continuously and randomly fly to the flower patches aroundthe hive (Seeley, 1996).
If these scout bees happen to discover a flower patch that con-tains more food than a predetermined level, they fly back to thehive and inform the other bees in the colony about their findingby performing a special dance called the ‘‘waggle dance” (Frisch,1976). The waggle dance is illustrated in Fig. 1. This dance is anessential form of communication between the members of the col-ony and actually performed to convey three important pieces ofinformation regarding flower areas around the hive. These arethe direction of the flower patch, the distance of the patch to thehive and the quality of the food in the patch (Camazine et al.,2003; Frisch, 1976). This information allows the other bees in thecolony to accurately evaluate the relative quality of the food areasaround the hive and the effort necessary to collect them (Camazineet al., 2003). After the waggle dance ends, the scout bee flies backto the flower patch together with a number of other bees from thecolony. The number of bees accompanying the scout bee is deter-mined by the colony depending on the relative quality of the flow-er patch. In this manner, the colony can collect food in a fast andefficient manner.
The bees collecting food from a flower patch also regularlycheck its food level. If the food level is still high after harvesting,

Fig. 1. Waggle dance.
K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135 3131
this is communicated to the colony during the next waggle dancethat they perform after returning to their hive, and the colony re-cruits more bees for next visit to that source (Camazine et al.,2003).
3.2. Bees algorithm used in this work
As explained in the previous section, the BA (Pham, Ghanbar-zadeh et al., 2006; Pham, Koc et al., 2006; Pham, Otri et al., 2006;Pham, Soroka et al., 2006) is exploited by observing the behaviorof the honey bees to obtain the optimal solution to a given optimi-zation problem. The BA is depicted in Fig. 2 by using pseudo code.
The operation of the BA is tuned by a number of externalparameters. These parameters include the number of scout bees(n), number of elite bees (e), number of patches chosen from vis-ited points (m), number of bees employed for patches visited byelite bees (nep), number of bees employed for other selectedpatches (nsp), size of patches (ngh), and the stopping criterion.The algorithm initializes by randomly assigning the n scout beesto the search space in Step 1. The fitness values of the points thatscout bees visited are computed in Step 2.
The bees yielding the highest fitness values are chosen as ‘‘elitebees” in Step 3. The algorithm then performs a number of searchesaround the neighborhoods of the elite bees as well as of the other
Step 1: Randomly generate the population
Step 2: Compute the fitness of the popula
Step 3: Select the elite bees and the elite s
Step 4: Select other sites for neighborhoo
Step 5: Assign bees to the selected sites a
Step 6: Select the fittest bee from each sit
Step 7: Recruit remaining bees to search r
Step 8: If termination criterion is not met
Step 9: The algorithm is terminated.
Fig. 2. Pseudo code
bees in Steps 4–6. As a different alternative, the fitness values maybe used to calculate the possibility of selecting the bees. The algo-rithm assigns a greater number of bees to follow the elite bees thanthe other bees for performing a more detailed search around theneighborhood of the points visited by the elite bees since theserepresent more promising solutions. Differential recruitment with-in scouting is also an important operation of the BA. Both scoutingand differential recruitment are encountered in nature.
In Step 6, however, only one bee yielding the highest fitness va-lue will be chosen for each site to produce the next bee populationwhereas such a restriction is not observed in nature. Here, this isnecessary for reducing the number of points to be visited. Theremaining bees in the population are randomly assigned aroundthe search space in Step 7 for exploring new potential solutions.These steps are repeated until the termination criterion is satisfied.The colony will have two parts to its new population at the end ofthe each iteration. The first part will contain the representativesfrom each selected patch and second part will contain other scoutbees assigned to perform random searches.
The BA used in this paper employs an adaptive mechanism forproducing neighborhoods. The neighborhoods of a present solutionare created by the following procedure:
If Bee(s, i) = (a1, a2, . . . , aN, d1, d2, . . . , dN) is the solution vectorat the ith iteration for sth bee, a neighborhood (BeeNeighbor-hood(s, i)) of this solution is produced as:
BeeNeighborhoodðs; iÞ ¼ Beeðs; iÞ þ Dðs; iÞ ð3aÞ
with
Dðs; iÞ ¼ Randð2NÞCf ðiÞ ð3bÞRandð2NÞ ¼ ðr1; r2; . . . ; r2NÞ ð3cÞ
and
Cf ðiþ 1Þ ¼Cf ðiÞ; LIN þ 5 � i
0:9Cf ðiÞ; LIN þ 5 < i
�ð3dÞ
where values of the (r1, r2, . . . , r2N) are generated randomly be-tween �0.5 and 0.5, Cf(i) is an arbitrary positive coefficient, andLIN is the iteration number at which the latest improvement wasobtained. The value of Cf(1) is determined by experience on theBA. In this paper, the initial value of Cf(i) for i = 1 is determined as3 and then iteratively updated using (3d). In the optimization pro-cedure, the values of (d1, d2, . . . , dN) and (a1, a2, . . . , aN, d1,d2, . . . , dN) are determined for phase-only and complex weight (boththe amplitude and phase) synthesizes, respectively.
tion
ites for neighborhood search
d search
nd compute their fitnesses
e
andomly and compute their fitnesses
then go to Step 3
of the basic BA.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-150
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
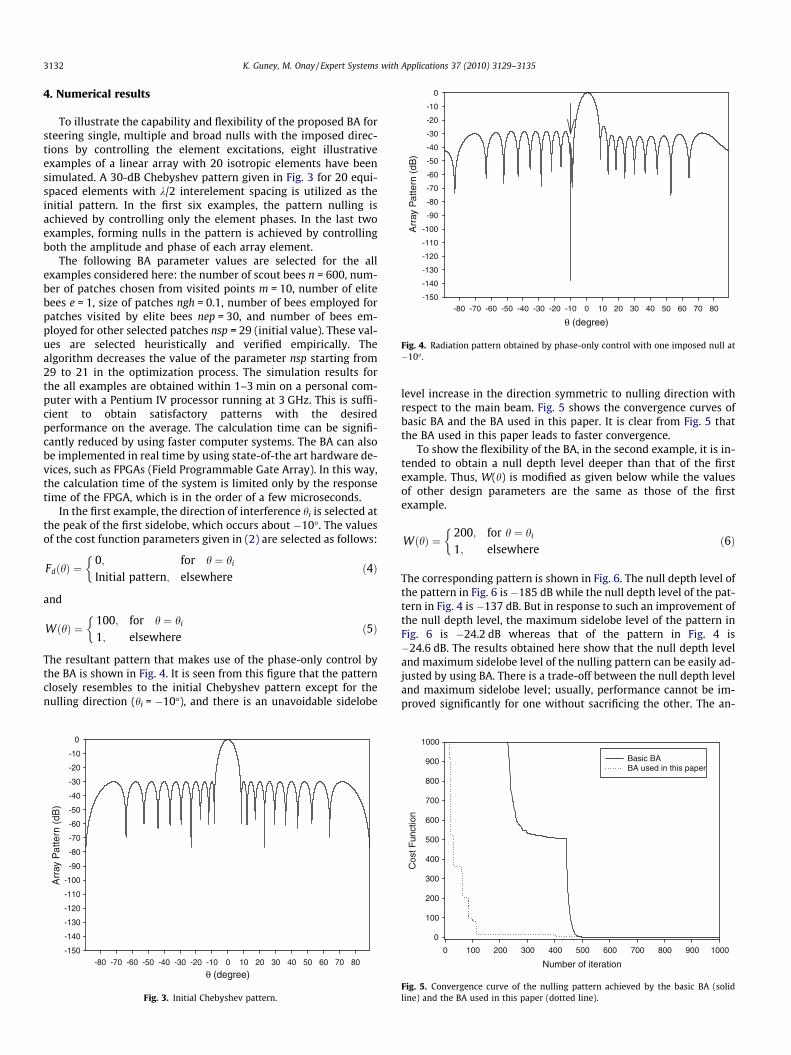
Fig. 4. Radiation pattern obtained by phase-only control with one imposed null at�10�.
3132 K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135
4. Numerical results
To illustrate the capability and flexibility of the proposed BA forsteering single, multiple and broad nulls with the imposed direc-tions by controlling the element excitations, eight illustrativeexamples of a linear array with 20 isotropic elements have beensimulated. A 30-dB Chebyshev pattern given in Fig. 3 for 20 equi-spaced elements with k/2 interelement spacing is utilized as theinitial pattern. In the first six examples, the pattern nulling isachieved by controlling only the element phases. In the last twoexamples, forming nulls in the pattern is achieved by controllingboth the amplitude and phase of each array element.
The following BA parameter values are selected for the allexamples considered here: the number of scout bees n = 600, num-ber of patches chosen from visited points m = 10, number of elitebees e = 1, size of patches ngh = 0.1, number of bees employed forpatches visited by elite bees nep = 30, and number of bees em-ployed for other selected patches nsp = 29 (initial value). These val-ues are selected heuristically and verified empirically. Thealgorithm decreases the value of the parameter nsp starting from29 to 21 in the optimization process. The simulation results forthe all examples are obtained within 1–3 min on a personal com-puter with a Pentium IV processor running at 3 GHz. This is suffi-cient to obtain satisfactory patterns with the desiredperformance on the average. The calculation time can be signifi-cantly reduced by using faster computer systems. The BA can alsobe implemented in real time by using state-of-the art hardware de-vices, such as FPGAs (Field Programmable Gate Array). In this way,the calculation time of the system is limited only by the responsetime of the FPGA, which is in the order of a few microseconds.
In the first example, the direction of interference hi is selected atthe peak of the first sidelobe, which occurs about �10�. The valuesof the cost function parameters given in (2) are selected as follows:
FdðhÞ ¼0; for h ¼ hi
Initial pattern; elsewhere
�ð4Þ
and
WðhÞ ¼100; for h ¼ hi
1; elsewhere
�ð5Þ
The resultant pattern that makes use of the phase-only control bythe BA is shown in Fig. 4. It is seen from this figure that the patternclosely resembles to the initial Chebyshev pattern except for thenulling direction (hi = �10�), and there is an unavoidable sidelobe
θ (degree)-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-150
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fig. 3. Initial Chebyshev pattern.
level increase in the direction symmetric to nulling direction withrespect to the main beam. Fig. 5 shows the convergence curves ofbasic BA and the BA used in this paper. It is clear from Fig. 5 thatthe BA used in this paper leads to faster convergence.
To show the flexibility of the BA, in the second example, it is in-tended to obtain a null depth level deeper than that of the firstexample. Thus, W(h) is modified as given below while the valuesof other design parameters are the same as those of the firstexample.
WðhÞ ¼200; for h ¼ hi
1; elsewhere
�ð6Þ
The corresponding pattern is shown in Fig. 6. The null depth level ofthe pattern in Fig. 6 is �185 dB while the null depth level of the pat-tern in Fig. 4 is �137 dB. But in response to such an improvement ofthe null depth level, the maximum sidelobe level of the pattern inFig. 6 is �24.2 dB whereas that of the pattern in Fig. 4 is�24.6 dB. The results obtained here show that the null depth leveland maximum sidelobe level of the nulling pattern can be easily ad-justed by using BA. There is a trade-off between the null depth leveland maximum sidelobe level; usually, performance cannot be im-proved significantly for one without sacrificing the other. The an-
Number of iteration
0 100 200 300 400 500 600 700 800 900 1000
Cos
t Fun
ctio
n
0
100
200
300
400
500
600
700
800
900
1000
Basic BABA used in this paper
Fig. 5. Convergence curve of the nulling pattern achieved by the basic BA (solidline) and the BA used in this paper (dotted line).
θ (degree)-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-190-180-170-160-150-140-130-120-110-100-90-80-70-60-50-40-30-20-10
0
Fig. 6. Radiation pattern obtained by phase-only control with a null depth leveldeeper than that of the first example having one imposed null at �10�.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-200-190-180-170-160-150-140-130-120-110-100-90-80-70-60-50-40-30-20-10
0
Fig. 7. Radiation pattern obtained by phase-only control with double imposed nullat �10� and 20�.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-160
-150
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
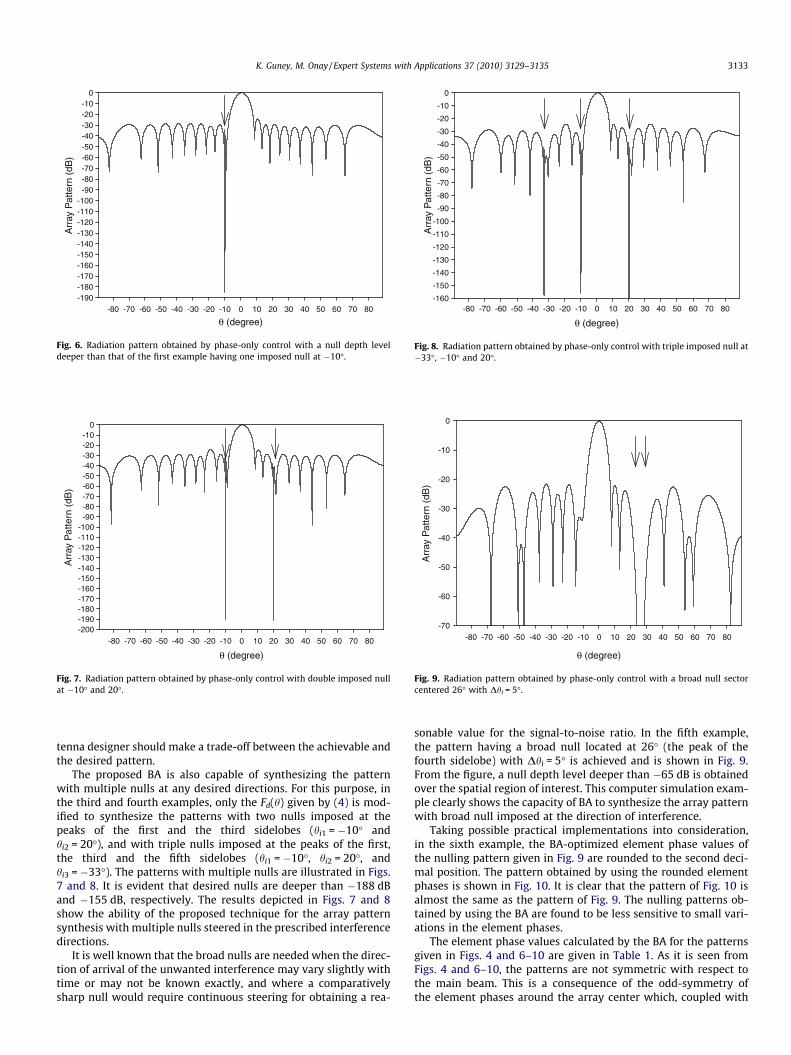
Fig. 8. Radiation pattern obtained by phase-only control with triple imposed null at�33�, �10� and 20�.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-70
-60
-50
-40
-30
-20
-10
0
Fig. 9. Radiation pattern obtained by phase-only control with a broad null sectorcentered 26� with Dhi = 5�.
K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135 3133
tenna designer should make a trade-off between the achievable andthe desired pattern.
The proposed BA is also capable of synthesizing the patternwith multiple nulls at any desired directions. For this purpose, inthe third and fourth examples, only the Fd(h) given by (4) is mod-ified to synthesize the patterns with two nulls imposed at thepeaks of the first and the third sidelobes (hi1 = �10� andhi2 = 20�), and with triple nulls imposed at the peaks of the first,the third and the fifth sidelobes (hi1 = �10�, hi2 = 20�, andhi3 = �33�). The patterns with multiple nulls are illustrated in Figs.7 and 8. It is evident that desired nulls are deeper than �188 dBand �155 dB, respectively. The results depicted in Figs. 7 and 8show the ability of the proposed technique for the array patternsynthesis with multiple nulls steered in the prescribed interferencedirections.
It is well known that the broad nulls are needed when the direc-tion of arrival of the unwanted interference may vary slightly withtime or may not be known exactly, and where a comparativelysharp null would require continuous steering for obtaining a rea-
sonable value for the signal-to-noise ratio. In the fifth example,the pattern having a broad null located at 26� (the peak of thefourth sidelobe) with Dhi = 5� is achieved and is shown in Fig. 9.From the figure, a null depth level deeper than �65 dB is obtainedover the spatial region of interest. This computer simulation exam-ple clearly shows the capacity of BA to synthesize the array patternwith broad null imposed at the direction of interference.
Taking possible practical implementations into consideration,in the sixth example, the BA-optimized element phase values ofthe nulling pattern given in Fig. 9 are rounded to the second deci-mal position. The pattern obtained by using the rounded elementphases is shown in Fig. 10. It is clear that the pattern of Fig. 10 isalmost the same as the pattern of Fig. 9. The nulling patterns ob-tained by using the BA are found to be less sensitive to small vari-ations in the element phases.
The element phase values calculated by the BA for the patternsgiven in Figs. 4 and 6–10 are given in Table 1. As it is seen fromFigs. 4 and 6–10, the patterns are not symmetric with respect tothe main beam. This is a consequence of the odd-symmetry ofthe element phases around the array center which, coupled with

θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-190-180-170-160-150-140-130-120-110-100-90-80-70-60-50-40-30-20-10
0
Fig. 11. Radiation pattern obtained by controlling both the amplitude and thephase with one imposed null at �14�.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-180-170-160-150-140-130-120-110-100-90-80-70-60-50-40-30-20-10
0
Fig. 12. Radiation pattern obtained by controlling both the amplitude and thephase with double imposed null at �14� and 26�.
θ (degree)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80
Arr
ay P
atte
rn (
dB)
-70
-60
-50
-40
-30
-20
-10
0
Fig. 10. Radiation pattern obtained by rounding the element phase values of thenulling pattern given in Fig. 9 to the second decimal position.
3134 K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135
the even symmetry of the element amplitudes, results in a patternthat is not symmetric about the maim beam peak at 0�. It shouldalso be noted that since the element phases have odd-symmetryabout the center of the array, the number of phase shifters to beused is 2N, but the number of controllers for the phase shifters isN for an array with 2N elements.
In the final two examples, the pattern with one null imposed atthe peak of the second sidelobe (hi = �14�), and the pattern havingdouble nulls imposed at the peaks of the second and the fourthsidelobes (hi1 = �14� and hi2 = 26�) are obtained by controlling boththe amplitude and the phase of array elements, separately. Theresultant patterns that make use of both amplitude and phase con-trol by the BA are shown in Figs. 11 and 12. The null depth levels ofthe patterns in Figs. 11 and 12 are �188.7 dB and �182.5 dB,respectively. The maximum sidelobe levels of the patterns in Figs.11 and 12 are �28.45 dB and �28.48 dB, respectively. The requiredelement amplitude and phase values obtained by BA for the pat-terns in Figs. 11 and 12 are listed in Table 2.
The results depicted in Figs. 4 and 6–12 show that the BA pro-posed in this paper can accurately obtain the nulling patterns bycontrolling the phase-only and both the amplitude and phase ofthe array elements. From the null depth and the maximum side-lobe level points of view, the performances of the patterns are verygood. The nulling technique based on BA preserves the character-istics of the initial Chebyshev pattern with little pattern distur-bance except for the nulling directions. The half power beamwidth for nulling patterns obtained by the BA is almost equal tothat of initial Chebyshev pattern. The validity of the proposed
Table 1The element amplitudes (an) of the initial Chebyshev array and the element phases (dn) o
n Initial Chebyshev pattern an Element phases dn (in degree) co
Fig. 3 Fig. 4 Fig. 6
±1 1.00000 �0.45514 �0.51837±2 0.97010 �1.59202 �0.74055±3 0.91243 �2.65980 �2.39698±4 0.83102 �4.74900 �4.45835±5 0.73147 �6.37361 �6.59396±6 0.62034 �9.91512 �9.21607±7 0.50461 �13.15892 �11.04080±8 0.39104 �17.72797 �15.12377±9 0.28558 �27.88532 �26.53216±10 0.32561 �19.52091 �24.08387
method is also verified by executing the BA several times, and re-sults with performance very similar to those presented here are al-ways obtained. It is clearly shown in this paper that the BA can beused as an alternative to other antenna array synthesis algorithms.Since the BA has good accuracy and does not require complicatedmathematical functions, it can be very useful to antenna engineersfor the pattern synthesis of antenna arrays.
f nulling patterns given in Figs. 4 and 6–10.
mputed with the BA
Fig. 7 Fig. 8 Fig. 9 Fig. 10
�1.43474 �1.90123 ±3.57787 ±3.58�3.73236 �2.33325 �5.91446 �5.91�3.20904 �5.41513 ±3.38858 ±3.39�1.80487 �3.27157 ±9.24661 ±9.25�2.65535 ±0.75676 ±1.21801 ±1.22�8.06011 �7.09286 ±11.61865 ±11.62�13.50426 �17.21284 ±8.26520 ±8.27�19.71936 �20.61341 �14.36003 �14.36�22.00429 �10.72389 �35.96992 �35.97�16.41680 �27.21082 ±7.73590 ±7.74

Table 2The element amplitudes (an) and phases (dn) computed by BA for the array patternsgiven in Figs. 11 and 12.
n Element amplitudes and phases (in degree)
Fig. 11 Fig. 12
an dn an dn
±1 1.00000 �0.01024 1.00000 �0.00776±2 0.97831 �0.82947 1.01024 �0.09389±3 0.93918 �1.03995 0.96212 �1.78735±4 0.86188 �0.06088 0.87033 �2.35549±5 0.76086 ±0.24702 0.72689 �1.20245±6 0.63679 ±1.28041 0.60626 ±1.11234±7 0.48802 ±1.50027 0.48507 ±1.83745±8 0.35529 ±0.87655 0.35775 �2.70795±9 0.24563 ±0.90508 0.22700 �0.33232±10 0.32955 �0.26411 0.26293 ±2.50259
K. Guney, M. Onay / Expert Systems with Applications 37 (2010) 3129–3135 3135
5. Conclusion
In this paper, a method based on BA for the pattern synthesis oflinear antenna arrays with the prescribed nulls is presented. Null-ing of the pattern is achieved by controlling the phase-only andboth the amplitude and phase of the array elements. The computersimulation results show that the BA is capable of accurately deter-mining the element excitations which yield the array patterns withsingle, multiple and broad nulls imposed at the directions of inter-ference while the main beam and the sidelobes are quite close tothe initial pattern. For practical consideration, the sensitivity ofthe produced patterns due to small variations of the elementphases is examined by rounding the element phase values to thesecond decimal position. Although only linear antenna arrays havebeen considered here, the BA can easily be used for arrays withcomplex geometries as well as nonisotropic-elements. As an evolu-tionary algorithm, the BA will most likely be an increasingly attrac-tive alternative, in the electromagnetics and antennas community,to other evolutionary algorithms.
References
Akdagli, A., & Guney, K. (2004). Null steering of linear antenna arrays by phaseperturbations using modified tabu search algorithm. Journal of CommunicationsTechnology and Electronics, 49, 37–42.
Akdagli, A., Guney, K., & Karaboga, D. (2002). Pattern nulling of linear antennaarrays by controlling only the element positions with the use of improvedtouring ant colony optimization algorithm. Journal of Electromagnetic Waves andApplications, 16, 1423–1441.
Babayigit, B., Akdagli, A., & Guney, K. (2006). A clonal selection algorithm for nullsynthesizing of linear antenna arrays by amplitude control. Journal ofElectromagnetic Waves and Applications, 20, 1007–1020.
Bonabeau, E., Dorigo, M., & Theraulaz, G. (1999). Swarm intelligence: From natural toartificial systems. New York: Oxford University Press.
Camazine, S., Deneubourg, J. L., Franks, N. R., Sneyd, J., Theraula, G., & Bonabeau, E.(2003). Self-organization in biological systems. Princeton: Princeton UniversityPress.
Er, M. H. (1990). Linear antenna array pattern synthesis with prescribed broad nulls.IEEE Transactions on Antennas Propagation, 38, 1496–1498.
Frisch, K. V. (1976). Bees: Their vision, chemical senses and language (revised ed.).Ithaca, New York: Cornell University Press.
Guney, K., & Akdagli, A. (2001). Null steering of linear antenna arrays using amodified tabu search algorithm. Progress in Electromagnetics Research, 33,167–182.
Guney, K., & Babayigit, B. (2008). Amplitude-only pattern nulling of linear antennaarrays with the use of an immune algorithm. International Journal of RF andMicrowave Computer-aided Engineering, 18, 397–409.
Guney, K., Babayigit, B., & Akdagli, A. (2007). Position only pattern nulling of linearantenna array by using a clonal selection algorithm (CLONALG). ElectricalEngineering, 90, 147–153.
Guney, K., Babayigit, B., & Akdagli, A. (2008). Interference suppression of linearantenna arrays by phase-only control using a clonal selection algorithm. Journalof the Franklin Institute, 345, 254–266.
Guney, K., & Basbug, S. (2008a). Interference suppression of linear antenna arrays byamplitude-only control using a bacterial foraging algorithm. Progress inElectromagnetics Research, 79, 475–497.
Guney, K., & Basbug, S. (2008b). Phase-only pattern nulling of linear antenna arrayswith the use of a bacterial foraging algorithm. Neural Network World, 18,257–273.
Guney, K., & Onay, M. (2007a). Amplitude-only pattern nulling of linear antennaarrays with the use of bees algorithm. Progress in Electromagnetics Research, 70,21–36.
Guney, K., & Onay, M. (2007b). Bees algorithm for null synthesizing of linearantenna arrays by controlling only the element positions. Neural Network World,16, 153–169.
Guney, K., & Onay, M. (2008). Bees algorithm for design of dual-beam linear antennaarrays with digital attenuators and digital phase shifters. International Journal ofRF and Microwave Computer-aided Engineering, 18, 337–347.
Haupt, R. L. (1997). Phase-only adaptive nulling with a genetic algorithm. IEEETransactions on Antennas Propagation, 45, 1009–1015.
Ismail, T. H., & Dawoud, M. M. (1991). Null steering in phased arrays by controllingthe element positions. IEEE Transactions on Antennas Propagation, 39,1561–1566.
Karaboga, N., Guney, K., & Akdagli, A. (2002). Null steering of linear antenna arrayswith the use of modified touring ant colony optimization algorithm.International Journal of RF and Microwave Computer-aided Engineering, 12,375–383.
Karaboga, D., Guney, K., & Akdagli, A. (2004). Antenna array pattern nulling bycontrolling both the amplitude and the phase using modified touring ant colonyoptimisation algorithm. International Journal of Electronics, 91, 241–251.
Khodier, M. M., & Christodoulou, C. G. (2005). Linear array geometry synthesis withminimum sidelobe level and null control using particle swarm optimization.IEEE Transactions on Antennas Propagation, 53, 2674–2679.
Liao, W. P., & Chu, F. L. (1997). Array pattern nulling by phase and positionperturbations with the use of the genetic algorithm. Microwave and OpticalTechnology Letters, 15, 251–256.
Mailloux, R. J. (1994). Phased array antenna handbook. USA: Dedham, Artech House.Pham, D. T., Castellani, M., & Fahmy, A. A. (2008). Learning the inverse kinematics of
a robot manipulator using the bees algorithm. In Proceedings of the industrialinformatics, sixth IEEE international conference (pp. 493–498).
Pham, D. T., Ghanbarzadeh, A., Koc, E., Otri, S., Rahim, S., & Zaidi, M. (2006). The beesalgorithm – A novel tool for complex optimisation problems. In Proceeding ofsecond international virtual conference on intelligent production machines andsystems. Oxford: Elsevier.
Pham, D. T., Koc, E., Ghanbarzadeh, A., & Otri, S. (2006). Optimisation of the weightsof multi-layered perceptrons using the bees algorithm. In Proceeding of fifthinternational symposium on intelligent manufacturing systems (pp. 38–46).Turkey: Sakarya University.
Pham, D. T., Otri, S., Ghanbarzadeh, A., & Koc, E. (2006). Application of the beesalgorithm to the training of learning vector quantisation networks for controlchart pattern recognition. In Proceedings of the information and communicationtechnologies conference (pp. 1624–1629).
Pham, D. T., Soroka, A. J., Ghanbarzadeh, A., Koc, E., Otri, S., & Packianather, M.(2006). Optimising neural networks for identification of wood defects using thebees algorithm. In Proceeding of IEEE international conference on industrialinformatics, Singapore (pp. 1346–1351).
Seeley, T. D. (1996). The wisdom of the hive: The social physiology of honey beecolonies. Cambridge, Massachusetts: Harvard University Press.
Shore, R. A. (1984). Nulling at symmetric pattern location with phase-only weightcontrol. IEEE Transactions on Antennas Propagation, 32, 530–533.
Tennant, A., Dawoud, M. M., & Anderson, A. P. (1994). Array pattern nulling byelement position perturbations using a genetic algorithm. Electronics Letters, 30,174–176.
Yang, S., Gan, Y. B., & Qing, A. (2004). Antenna-array pattern nulling using adifferential evolution algorithm. International Journal of RF and MicrowaveComputer-aided Engineering, 14, 57–63.