bab ii kajian pustaka a. gelombang ultrasonika-research.upi.edu/operator/upload/bab_ii(15).pdf ·...
TRANSCRIPT

7
BAB II
KAJIAN PUSTAKA
A. Gelombang Ultrasonik
Gelombang ultrasonik adalah gelombang bunyi dengan frekuensi yang
lebih besar dari batas frekuensi tertinggi yang bisa didengar oleh telinga manusia
yaitu lebih besar dari 20 KHz. Gelombang ultrasonik merupakan gelombang
longitudinal yaitu gelombang yang terjadi karena perapatan dan perenggangan
partikel-partikel dalam medium yang dilaluinya diakibatkan oleh gangguan dari
benda yang bergetar. Dapat pula dikatakan, gelombang ultrasonik adalah
gelombang bunyi yang terjadi karena adanya getaran dari partikel zat padat, zat
cair atau juga gas yang dilaluinya. Partikel-partikel tersebut bergetar disekitar titik
setimbangnya sehingga ikut menggetarkan partikel-partikel tetangganya.
Pada dasarnya ada dua syarat untuk membentuk getaran, pertama harus
ada sesuatu yang bergetar dan kedua harus ada gaya yang selalu membuat sesuatu
yang bergetar itu kembali ke posisi semula. Dengan kata lain, harus ada massa
dan elastisitas. Hal itu diumpamakan seperti beban yang digantung pada pegas
yang terikat ujung atasnya pada dinding. Mula-mula benda pada keadaan A
kemudian ditarik hingga benda berada pada posisi B, lalu dilepas. Maka benda
akan berosilasi dengan lintasan A-B-A-C-A- dan seterusnya, seperti ditunjukkan
pada gambar 2.1 berikut.

8
Gambar 2.1
Osilasi pegas
Benda yang bergetar memiliki frekuensi (f) dan frekuensi sudut (ω).
Frekuensi adalah banyaknya getaran tiap detik. Frekuensi sudut adalah banyaknya
siklus gerak penuh tiap detik. Frekuensi dan frekuensi sudut getaran bergantung
pada massa benda (m) dan konstanta pegas (k). Hal ini sesuai dengan persamaan
2.1, 2.2 dan 2.3 berikut.
m
k (2.1)
m
kf2 (2.2)
m
kf
2
1 (2.3)
Makin besar konstanta pegas maka frekuensi dan frekuensi sudut akan semakin
besar. Sedangkan makin besar massa yang bergetar, frekuensi dan frekuensi sudut
getaran akan semakin kecil.

9
Jarak antara titik puncak gelombang dengan titik setimbangnya disebut
amplitudo. Dapat dikatakan juga amplitudo adalah simpangan maksimum
gelombang terhadap titik setimbang gelombang. Amplitudo mempengaruhi
kekuatan atau kenyaringan gelombang yang disebut intensitas gelombang. Makin
besar amplitudo maka intensitas gelombang akan besar. Dengan kata lain, agar
bunyi yang dihasilkan memiliki intensitas gelombang yang besar maka amplitudo
dari gelombang tersebut harus besar. Hal yang sama juga terjadi pada alat musik
akustik seperti gitar. Frekuensi gitar ditentukan oleh tegangan senar (diatur oleh
penegang senar dan oleh posisi tekanan jari) yang dianalogikan dengan konstanta
pegas dan oleh ukuran (massa jenis) senar, yang dianalogikan dengan massa
benda.
Dua senar dengan tegangan tali yang sama namun masing-masing
memiliki massa jenis berbeda akan memiliki frekuensi natural yang berbeda.
Senar yang lebih ringan memiliki frekuensi yang lebih tinggi dari senar yang
berat. Intensitas bunyi yang dihasilkan akan sesuai dengan kekuatan kita memetik
gitar. Makin kuat kita memetik senar tersebut maka senar akan teregang lebih jauh
sehingga menghasilkan amplitudo getaran yang besar. Namun senar teregang saja
tidak cukup untuk menghasilkan bunyi dengan intensitas besar. Maka dari itu
dibuatlah badan gitar untuk menguatkan intensitas bunyi yang dihasilkan dari
senar gitar. Dengan dasar seperti itu sensor ultrasonik dibuat.
Gelombang bunyi merupakan bentuk energi mekanik yang hanya dapat
merambat dalam medium, tidak dapat merambat dalam vakum (tidak ada medium
rambat). Medium yang dilaluinya bisa berupa gas, cair atau padat. Perbedaan

10
medium inilah yang menyebabkan laju perambatan gelombang bunyi berbeda-
beda. Sama halnya dengan gelombang bunyi pada frekuensi rendah, medium yang
dilalui gelombang ultrasonik adalah gas. Gelombang bunyi yang merambat dalam
medium memiliki laju rambat gelombang yang sesuai dengan persamaan 2.4
sebagai berikut.
M
RTv (2.4)
Laju perambatan gelombang ultrasonik bergantung pada temperatur (T), kostanta
gas universal (R), massa molar gas (M) dan konstanta jenis gas (γ).
Tidak semua getaran mekanik dapat didengar oleh manusia. Manusia
dapat mendengar hanya pada rentang frekuensi yang sempit antara 16 Hz hingga
20000 Hz. Wilayah tersebut disebut wilayah audibel. Getaran dengan frekuensi
dibawah 20 Hz disebut subsonik dan bunyi dengan freukensi diatas 20 KHz
disebut sebagai wilayah ultrasonik. Pembagian wilayah frekuensi gelombang
bunyi ditunjukkan pada gambar 2.2 berikut.
Gambar 2.2
Pembagian wilayah frekuensi gelombang bunyi

11
Sensor ultrasonik kemudian dirancang agar dapat menghasilkan frekuensi
getar di wilayah frekuensi ultrasonik. Untuk membangkitkan getaran tersebut
digunakan material yang bergetar jika diberi tegangan listrik yaitu bahan
piezoelektrik.
B. Sensor Ultrasonik
Sensor adalah peralatan yang dapat mendeteksi gejala-gejala perubahan
energi. Sensor ultrasonik adalah sensor yang dapat mendeteksi gejala-gejala
perubahan energi yang diakibatkan oleh gelombang ultasonik. Bagian sensor
ultrasonik yang merubah gelombang ultrasonik menjadi energi lain disebut
tranduser.
Tranduser adalah sebuah alat yang dapat merubah suatu energi tertentu
yang diterima kedalam bentuk energi lain. Contohnya, energi listrik yang diubah
menjadi energi mekanik atau sebaliknya. Tranduser ultrasonik biasanya dibuat
dari bahan piezoelektrik.
Bahan piezoelektrik adalah suatu bahan yang bila mendapat tekanan
(piezo) maka akan terjadi polarisasi pada bahan tersebut. Bila bahan piezoelektrik
diberi tekanan maka muatan positif akan bekumpul pada salah satu sisi bahan
piezoelektrik dan muatan negatif akan berkumpul pada sisi lainnya. Karena bahan
tersebut bersifat kapasitor dengan konstanta dielektrik tertentu maka jika bahan ini
diberi tekanan, pada kedua permukaannya akan timbul perbedaan tegangan listrik.
Peristiwa ini disebut efek piezoelektrik langsung.
Bila kedua permukaan bahan piezoelektrik diberi tegangan listrik maka
rapat muatan pada kedua permukaan bahan akan meningkat sehingga volume

12
bahan bertambah. Karena bahan piezoelektrik ini juga merupakan elastik dengan
modulus elastis tertentu maka volume bahan ini akan kembali pada keadaan
setimbangnya. Sifat seperti inilah yang mengakibatkan getaran pada bahan
piezoelektrik. Peristiwa ini disebut efek piezoelektrik tidak langsung.
Efek dari piezoelektrik adalah reversible, artinya bahan ini dapat merubah
energi mekanik menjadi energi elektrik dan dapat merubah energi elektrik
menjadi energi mekanik. Kedua efek tersebut menyebabkan bahan piezoelektrik
dapat digunakan sebagai sebagai pemancar (transmitter) maupun sebagai
penerima (receiver).
Bahan piezoelektrik bersifat elastis. Bahan ini hanya mengalami
perubahan yang singkat saat diberi tegangan. Karena itu tegangan yang digunakan
tidak boleh tegangan DC. Arus AC dengan frekuensi yang sesuai dengan
frekuensi ultrasonik yang diinginkan harus dibangkitkan untuk bahan ini agar
bahan ini dapat secara kontinu menghasilkan getaran dengan frekuensi tetap.
Sensor ultrasonik terdiri dari dua buah tranduser. Alat ini memiliki
permukaan yang bergetar searah dengan arah rambat gelombang yang
dipancarkan. Tranduser bertindak sebagai sumber getaran yang akan diradiasikan
ke medium sekelilingnya. Gambar 2.3 berikut menunjukkan penampang samping
tranduser ultrasonik.

13
Gambar. 2.3
Penampang samping tranduser ultrasonik
Adapun bagian-bagian dari tranduser ini dapat dijelaskan sebagai berikut.
Terminal dan kabel yaitu komponen yang mengalirkan arus AC pada elemen
piezoelektrik. Elemen ini yang merubah energi listrik menjadi energi mekanik
sehingga bahan piezoelektrik begetar dan sebaliknya. Efek bahan piezoelektrik
dapat disempurnakan dengan menempelkan metal diafragma dengan struktur
unimorf. Fungsi dari diafragma ini adalah sebagai pembentuk frekuensi natural
dari gabungan elemen dan logam sehingga dapat beresonansi pada frekuensi yang
sesuai. Jika tegangan dikenai pada logam ini maka akan menghasilkan tegangan
lengkung membentuk getaran melengkung seperti yang ditunjukkan pada gambar
2.4 berikut.

14
Gambar 2.4
Prinsip kerja sensor ultrasonik
Jika frekuensi listrik yang dikenakan beresonansi dengan vibrator (elemen
piezoelektrik dan metal diafragma) ini maka akan menghasilkan getaran bunyi
dengan frekuensi yang sesuai. Sifat ini digunakan untuk transmitter. Jika getaran
bunyi yang diterima beresonansi dengan vibrator ini maka akan menghasilkan
tegangan listrik yang sesuai. Sifat ini digunakan untuk receiver.
Penyempurnaan dari tranduser sederhana ini adalah dengan menambahkan
kerucut diatas vibrator dan pengemasan yang sesuai sehingga dapat berfungsi
sebagai penguat sinyal (seperti halnya badan kayu pada gitar). Penutup tabung
juga disesuaikan dengan frekuensi yang akan dibangkitkan. Untuk mengurangi
pembentukan atau penangkapan noise akibat resonansi dengan partikel debu di
udara.

15
Pola radiasi gelombang ultrasonik merupakan gabungan antara gelombang
bidang datar (bergerak hanya ke satu arah) dan gelombang radial (bergerak ke
segala arah) seperti ditunjukkan gambar 2.5.
Gambar 2.5.
Pola radiasi gelombang ultrasonik.
Terlihat bahwa dari permukaan tranduser sampai jarak tertentu yang disebut
medan dekat, gelombang ultrasonik yang dipancarkan merupakan gelombang
bidang datar. Karena luas berkasnya tidak berubah maka sepanjang medan dekat
intensitasnya tidak berubah.
Panjang daerah gelombang bidang datar mengikuti persamaan 2.5 berikut.
4
2D
N (2.5)
N = Panjang daerah dgelombang bidang datar
D = Diameter kristal piezoelektrik
λ = Panjang gelombang ultrasonik.
Gelombang ultrasonik diradiasikan membentuk daerah kerucut dengan sudut
bukaan atau sudut elevasi (ф) tertentu. Besar sudut elevasi sesuai dengan
persamaan 2.6 berikut.
D22,1
2sin (2.6)
D
N
/2
Transduser

16
Intensitas gelombang ultrasonik yang diradiasikan dalam suatu medium
akan mengalami proses atenuasi (pelemahan). Proses ini disebabkan oleh
penyebaran gelombang dan absorbsi (penyerapan) gelombang.
Amplitudo gelombang akan mengalami atenuasi ketika berjalan disebuah
medium. Atenuasi gelombang mengikuti persamaan
)7.2()exp(ˆˆ)0()(
ydddy
Dimana )0(
d̂
adalah amplitudo pada waktu awal media, )(
ˆy
d adalah
amplitudo pada posisi y dan d adalah koefisien atenuasi perpindahan. Sama
halnya dengan amplitudo, atenuasi energi juga terjadi pada gelombang yang
merambat
)8.2()exp()0()(
yWWwy
W(0) adalah amplitudo pada awal media, W(y) adalah amplitudo pada posisi y dan
wadalah koefisien atenuasi energi.
Energi dan amplitudo gelombang akan mengalami atenuasi bergantung
pada jarak dan koefisien atenuasi amplitudo dan energinya. Dari persamaan 2.5
dan 2.6 menunjukkan bahwa nilai atenuasi energi dan amplitudo akan membesar
jika nilai y membesar. Makin jauh posisi benda yang dikenai gelombang maka
atenuasi gelombangnya akan makin besar.
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan
gelombang bunyi. Sensor ini menghasilkan gelombang bunyi yaitu oleh tranduser
pemancar yang kemudian diterima kembali oleh tranduser penerima dengan
perbedaan waktu sebagai dasar penginderaannya. Perbedaan waktu antara

17
gelombang bunyi yang dipancarkan dengan gelombang bunyi yang ditangkap
kembali adalah berbanding lurus dengan jarak objek yang memantulkannya. Jenis
objek yang dapat diindera diantaranya adalah objek padat, cair, butiran maupun
tekstil .
Sensor ultrasonik memiliki beberapa keuntungan sebagai berikut.
1. Jangkaun sensor ultrasonik dalam mendeteksi objek penghalang relatif luas
dibanding sensor inframerah atau sensor laser. Dalam hal ini jika objek tidak
tegak lurus dengan sensor ultrasonik maka sensor masih dapat mendeteksi
keberadaan objek tersebut.
2. Makin tinggi gelombang bunyi makin pendek panjang gelombang, berarti
difraksi disekitar halangan yang akan diukur dimensinya makin berkurang.
Hal ini memudahkan untuk meluruskan atau memfokuskan ultrasonik.
3. Digunakan dalam berbagai bidang.
4. Radiasi dari gelombang ultrasonik yang dipancarkan tidak berbahaya.
Selain keuntungan, tentunya setiap jenis sensor memiliki kekurangan.
Adapun kekurangan dari sensor ultrasonik adalah :
1. Sensor ultrasonik dapat menerima frekuensi lain sehingga sensor seakan-akan
mendeteksi halangan yang sebenarnya tidak ada.
2. Jika objek yang dideteksi berukuran besar dan berbentuk tidak beraturan atau
jumlahnya banyak maka dimungkinkan terjadi pantulan-pantulan sehingga
jarak yang terdeteksi oleh sensor tidak merefleksikan jarak objek yang
sebenarnya.

18
3. Jika daerah pantul berbentuk cekung maka akan menyulitkan untuk
mengetahui apakah nilai waktu pantul yang terdeteksi adalah hasil pantul dari
bidang yang tepat di depan ataukah dari bidang yang membentuk sudut cukup
besar dari bidang tepat di depan.
Tidak seperti sensor infra merah dan laser yang hanya mendeteksi wilayah
yang sangat sempit, pancaran gelombang ultrasonik bersifat menyebar dan
membentuk area deteksi berbentuk kerucut. Sensor ultrasonik ini memiliki
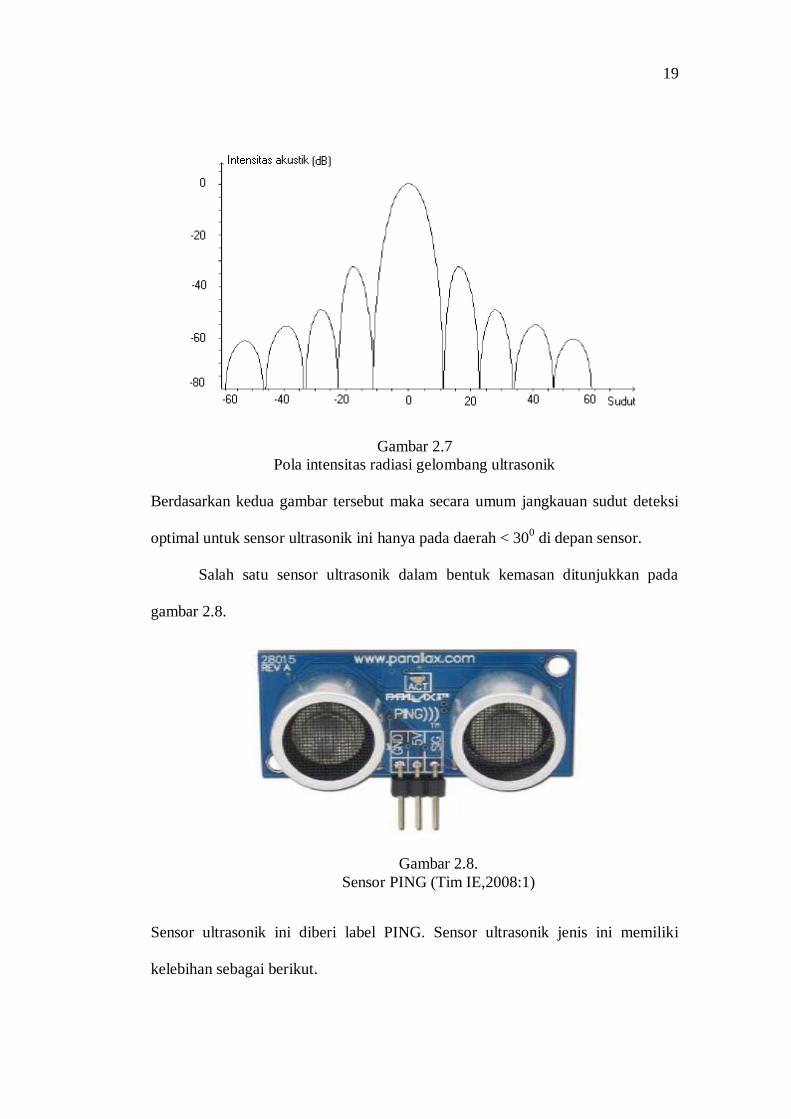
karakteristik intensitas radiasi yang bergantung pada sudut elevasi. Gambar 2.6
dan 2.7 berturut-turut berikut menunjukkan pola intensitas radiasi gelombang
ultrasonik
Gambar 2.6
Pola intensitas radiasi gelombang ultrasonik
19
Gambar 2.7
Pola intensitas radiasi gelombang ultrasonik
Berdasarkan kedua gambar tersebut maka secara umum jangkauan sudut deteksi
optimal untuk sensor ultrasonik ini hanya pada daerah < 300 di depan sensor.
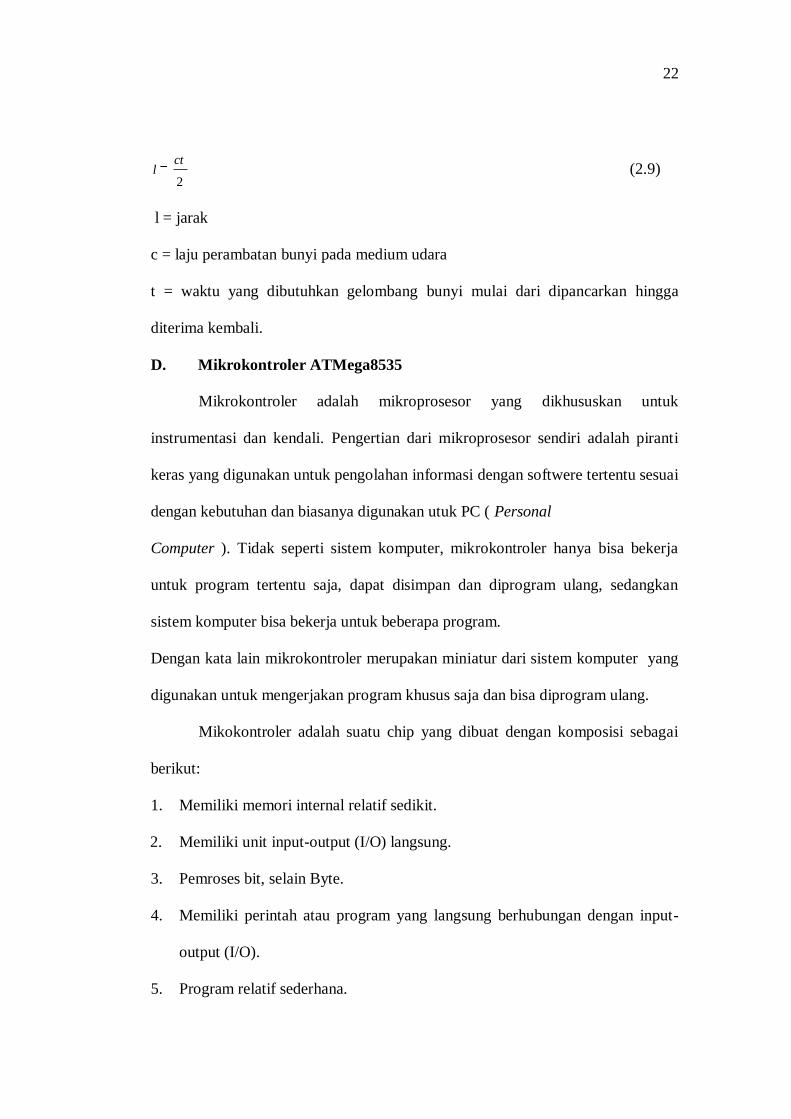
Salah satu sensor ultrasonik dalam bentuk kemasan ditunjukkan pada
gambar 2.8.
Gambar 2.8.
Sensor PING (Tim IE,2008:1)
Sensor ultrasonik ini diberi label PING. Sensor ultrasonik jenis ini memiliki
kelebihan sebagai berikut.

20
1. Kemasan Rangkain sensor ultrasonik PING lebih kecil dan sederhana.
2. Mampu mendeteksi objek pada jarak 3 cm hingga 3 m.
3. Lebih mudah dihubungkan ke mikrokontroler yaitu hanya pada satu kaki
yang berlabel SIG.
4. Register ke dalam alamat mikrokontroler lebih sedikit sehingga
mempermudah ketika penulisan bahasa pemograman.
Pada umumnya prinsip kerja sensor ultrasonik ditunjukkan pada gambar 2.9
berikut.
Gambar 2.9
Prinsip operasi sensor ultrasonik
Tegangan yang diberikan pada PING sebesar +5 Volt diubah menjadi tegangan
+10 dan -10 V oleh IC 680. Tegangan ini digunakan untuk tegangan Amplifier
(penguat) dan tegangan ultrasonik Pengirim. Frekuensi sinyal yang digunakan
IC 680 IC 555 Penguat Pulsa
dikirim
di
+ 5V
Astable
Multivibrator
Penguat (Peak
Amplifier
Perata
gelombang
Pre
Amp
Pulsa
diterima

21
adalah 40 KHz. Rangkaian Astable Multivibrator berfungsi mengatur agar
frekuensi yang dibangkitkan IC 555 bekerja pada frekuensi 40 KHz. Kemudian
sinyal diubah dan dikuatkan menjadi 20 v p/p kemudian tegangan ini yang dikirim
ke transmitter (pengirim). Setelah Echo diterima, sinyal echo dikuatkan mencapai
1 v p/p kemudian diratakan sehingga sinyal tegangan menjadi + 1v. Sinyal + 1 V
dikuatkan lagi menjadi +5V. Sinyal ini yang akan dikirim ke mikrokontroler.
C. Prinsip Dasar Pengukur Jarak
Sensor ultrasonik untuk mengukur jarak pada dasarnya menggunakan
metode TOF (the time-of-flight). Metode ini dapat dijelaskan sebagai berikut.
Gambar 2.10
Sistem Sensor Ultrasonik pengukur jarak
Sensor ultrasonik memancarkan gelombang kemudian dipantulkan oleh benda
yang akan diukur jaraknya. Ilustrasi tersebut ditunjukkan pada gambar 2.10.
Dengan diperoleh variabel waktu yang terukur mulai dari pulsa ultrasonik
dipancarkan hingga diterima, jarak dapat dihitung. Persamaan 2.9 berikut dapat
digunakan untuk menghitung jarak.
22
2
ctl (2.9)
l = jarak
c = laju perambatan bunyi pada medium udara
t = waktu yang dibutuhkan gelombang bunyi mulai dari dipancarkan hingga
diterima kembali.
D. Mikrokontroler ATMega8535
Mikrokontroler adalah mikroprosesor yang dikhususkan untuk
instrumentasi dan kendali. Pengertian dari mikroprosesor sendiri adalah piranti
keras yang digunakan untuk pengolahan informasi dengan softwere tertentu sesuai
dengan kebutuhan dan biasanya digunakan utuk PC ( Personal
Computer ). Tidak seperti sistem komputer, mikrokontroler hanya bisa bekerja
untuk program tertentu saja, dapat disimpan dan diprogram ulang, sedangkan
sistem komputer bisa bekerja untuk beberapa program.
Dengan kata lain mikrokontroler merupakan miniatur dari sistem komputer yang
digunakan untuk mengerjakan program khusus saja dan bisa diprogram ulang.
Mikokontroler adalah suatu chip yang dibuat dengan komposisi sebagai
berikut:
1. Memiliki memori internal relatif sedikit.
2. Memiliki unit input-output (I/O) langsung.
3. Pemroses bit, selain Byte.
4. Memiliki perintah atau program yang langsung berhubungan dengan input-
output (I/O).
5. Program relatif sederhana.

23
6. Beberapa varian memiliki memori yang tidak hilang bila catu daya padam
didalamnya untuk menyimpan program.
Sedangkan dalam aplikasi, sistem mikrokontroler memiliki karakteristik
sebagai berikut.
1. Memiliki program khusus yang disimpan dalam memori untuk aplikasi
tertentu, tidak seperti PC yang multifungsi karena mudahnya memasukkan
program. Program mikrokontroler relatif lebih kecil dari pada program-
program pada PC
2. Konsumsi daya kecil.
3. Rangkaian sederhana
4. Komponen sedikit.
5. Unit input-output (I/O) yang sederhana.
6. Lebih tahan terhadap kondisi lingkungan ekstrem, misalnya tekanan dan
temperatur.
Dalam mikrokontroler ada yang disebut sebagai perangkat pengembang.
Perangkat pengembang ini dibutuhkan oleh mikrokontroler untuk dapat bekerja.
Adapun perangkat pengembang ini adalah sebagai berikut.
1. Compiler atau penerjemah. Mikrokontroler bekerja dalam kode-kode bahasa
mesin.
2. Programmer, alat yang digunakan untuk mengisi program ke chip
mikrokontroler. Artinya kode-kode bahasa mesin dimasukkan dalam memori
ROM, EEPROM atau Flash memori.

24
Mikrokontroler yang digunakan pada penelitian ini yaitu jenis
mikrokontroler AVR (Alf and Vegard’s Risc processor). Memiliki arsitektur RISC
(reduce intruction set computer) 8 bit, dimana semua instruksi dikemas dalam
kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu
siklus clock. Salah satu AVR produk ATMEL yaitu ATMega8535.
Konstruksi ATMega8535 ditunjukkan pada gambar (2.11). Adapun
bagian-bagian ATMega8535 secara umum adalah sebagai berikut.
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan oscilator internal.
6. SRAM sebesar 512 Byte
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka serial pheripheral interface (SPI).
10. EEPROM sebesar 512 Byte yang dapat diprogram saat operasi.
11. Antar muka komparator analog.
12. Port USART untuk komunikasi serial.
Adapun Fitur ATMEGA8535 adalah sebagai berikut.
1. Sistem mikroprosesor 8 bit berbasis RISC, kecepatan maksimal 16 MHz.

25
2. Kapabilitas memori Flash 8 KB, SRAM sebesar 512 Byte dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
Gambar 2.11
Konstruksi ATMega8535(www.atmel.com)
Konvigurasi pin ATMega8535 ditunjukkan pada gambar (2.12) dan secara singkat
dapat dijelaskan sebagai berikut.
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin Ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan sebagai pin masukan
ADC.
4. Port B (PB0..PB7) merupakakan pin I/O dua arah dan pin fungsi khusus
sebagai Timer/Counter, komparator analog dan SPI.
5. Port C (PC0..PC&) merupakan pin I/O dua arah dan pin fungsi khusus
sebagai TWI, komparator analog, dan Timer Oscillator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus
sebagai komparator analog, interupsi eksternal, dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.

26
10. AREF merupakan pin masukan tegangan referensi ADC.
Gambar 2.12
Pin Atmega8535 (www.atmel.com)
E. Bahasa Pemograman C
Bahasa C populer digunakan dengan alasan sebagai berikut.
1. Bahasa C tersedia hampir disemua jenis komputer.
2. Kode bahasa C bersifat portabel artinya bahasa C untuk suatu komputer
tertentu dapat digunakan dikomputer lain dengan modifikasi sedikit.
3. Bahasa C terdiri dari sedikit kata kunci jika dibandingkan dengan bahasa
pemrograman lain. Bahasa C terdiri 32 kata kunci dan tambahan 7 kata kunci
dari Turbo C sedangkan bahasa pemograman lain terdiri dari ratusan kata
kunci sehingga lebih sulit mempelajarinya.
4. Proses executable (menjalankan) program bahasa C lebih cepat. Karena
bahasa C menyediakan sedikit kata-kata kunci maka konsekuensinya program
hasil dari kompilasi bahasa C relatif lebih cepat prosesnya dibanding dengan
bahasa lain.

27
5. Dukungan pustaka yang banyak.
6. Bahasa C adalah bahasa terstruktur. Bahasa C mempunyai struktur yang baik
sehingga mudah untuk dipahami dan lebih mudah ketika membuat pogram.
7. Bahasa C merupakan bahasa tingkat tinggi dan juga bahasa tingkat
menengah. Untuk mempunyai kemampuan seperti ini, bahasa C
menggabungkan bahasa tingkat tinggi (high level language) dengan bahasa
tingkat rendah (low level language ) menghasilkan bahasa tingkat menengah.
Bahasa C pada tingkat ini memiliki kemampuan untuk operasi-operasi bit,
Byte, alamat-alamat memori dan register.
8. Bahasa C adalah bahasa kompiler. Bahasa C akan menghasilkan pelaksanaan
(executable) program yang banyak dibutuhkan oleh program-program
komersial.
F. LCD (Liquid Crystal Display)
Tampilan dari beberapa alat ukur sederhana yang banyak beredar
dipasaran salah satunya menggunakan seven segmen. Pada seven segmen
membutuhkan rangkaian yang cukup kompleks. Jika tampilan yang diperlukan
lebih dari satu karakter huruf maka rangkaian yang dibuat akan lebih rumit dan
cukup sulit dipelajari. Selain seven segmen divais lain yang bisa menampilkan
hasil perhitungan alat ukur atau tampilan karakter lain yaitu LCD (Liquid Crystal
Display). LCD juga berfungsi untuk menampilkan suatu nilai hasil sensor,
menampilkan teks atau menampilkan menu pada aplikasi mikrokontroler.
Rangakaian yang dibutuhkan pun lebih sederhana dibandingkan seven segmen.
28
LCD yang digunakan adalah LCD M1632 yang merupakan LCD dengan
tampilan 16 x 2 baris dengan konsumsi daya rendah. LCD bentuk ini dikendalikan
oleh mikrokontroler HD44780 yang terdapat di dalam modul LCD.
Mikrokontroler ini yang berfungsi sebagai pengendali kerja LCD. Bentuk fisik
LCD ditunjukkan pada gambar 2.13 berikut
Gambar 2.13 Tampilan Fisik LCD
(M. Ary Heryanto.2008:49)
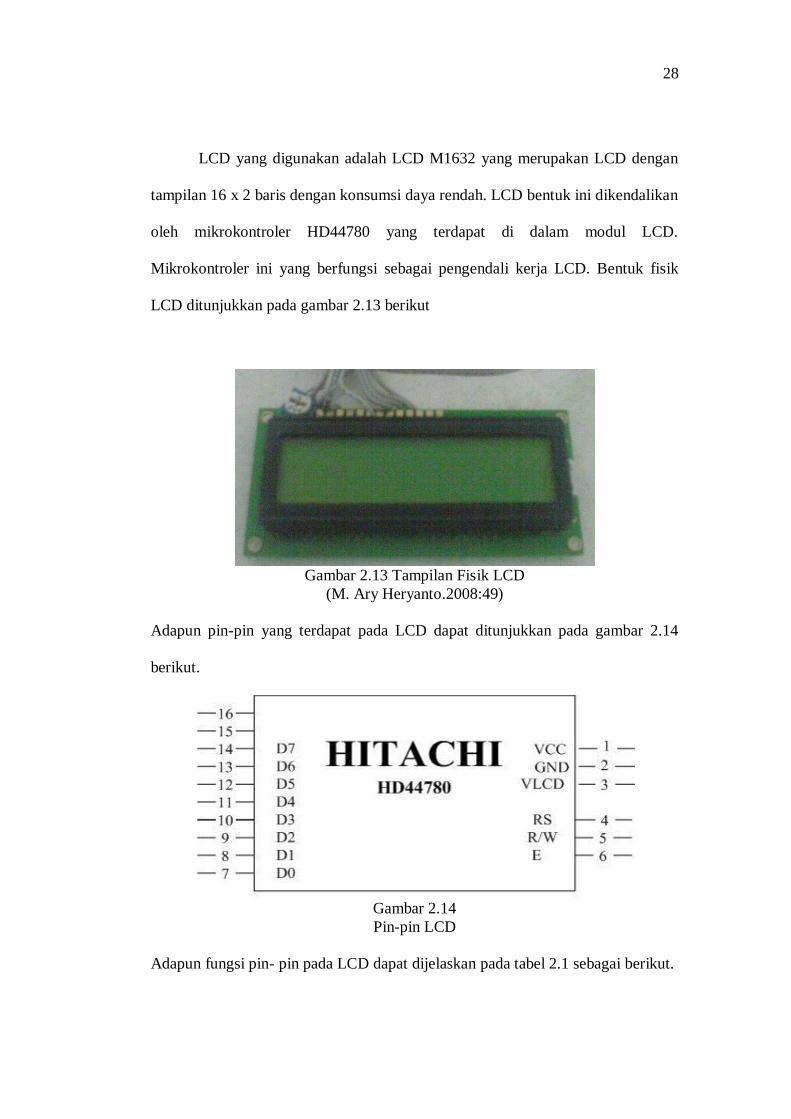
Adapun pin-pin yang terdapat pada LCD dapat ditunjukkan pada gambar 2.14
berikut.
Gambar 2.14
Pin-pin LCD
Adapun fungsi pin- pin pada LCD dapat dijelaskan pada tabel 2.1 sebagai berikut.

29
Tabel 2.1.Fungsi- fungsi pin pada LCD
No Pin Fungsi
1 GND 0V (GND)
2 Vcc 5 V
3 VLCD Mengatur kekontrasan LCD
4 RS Pilihan register; data input dan instruksi
input
5 RD H:Baca;L:Tulis
6 EN Masuknya sinyal
7 D0
Data Bus
8 D1
9 D2
10 D3
11 D4
12 D5
13 D6
14 D7
15 V+BL Tegangan positif Backlight (4-4,2 V;
50-200mA)
16 V-BL Tegangan negatif backlight (0 V;GND)
Bagian-bagian dari mikrokontroler HD44780 yang mengendalikan LCD adalah
sebagai berikut :
1. DDRAM (Display Data Random Access Memory) merupakan memori tempat
karakter yang ditampilkan berada.

30
2. CGRAM (Charakter Generator Random Access Memory) merupakan
memori untuk menggambarkan pola sebuah karakter dimana bentuk dari
karakter dapat diubah-ubah sesuai keinginan. Namun, memori akan hilang
saat Power Supply tidak aktif sehingga pola karakter akan hilang.
3. CGROM (Charakter Generator Read Only Memory) merupakan memori
untuk menggambarkan pola sebuah karakter dimana pola tersebut sudah
ditentukan secara permanen dari HD44780 sehingga pengguna tidak dapat
mengubahnya lagi. Karena ROM bersifat permanen, pola karakter tersebut
tidak akan hilang walaupun Power Supply tidak aktif.
4. REGISTER
HD44780 memiliki dua buah register yang aksesnya diatur menggunakan
kaki RS (Register Select). Pada saat RS berlogika 0, register yang diakses
adalah register perintah dan pada saat RS berlogika 1, register yang diakses
adalah register data.