automatizaciÓn de un sistema de elevaciÓn y
TRANSCRIPT

AUTOMATIZACIÓN DE UN SISTEMA DE ELEVACIÓN Y POSICIONAMIENTO
PARA UN PARQUEADERO DE BICICLETAS
PG-16-1-26.
ADRIANA MELISSA FORERO CALDERÓN
CÓDIGO: 1210205
IDENTIFICACIÓN: C.C. 1’019.099.620
JOSÉ MANUEL RODRÍGUEZ ROBERTO
CÓDIGO: 1211492
IDENTIFICACIÓN: C.C. 1’015.452.278
UNIVERSIDAD PILOTO DE COLOMBIA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BOGOTÁ, D.C.
2018
AUTOMATIZACIÓN DE UN SISTEMA DE ELEVACIÓN Y POSICIONAMIENTO PARA UN PARQUEADERO DE BICICLETAS
ADRIANA MELISSA FORERO CALDERÓN
CÓDIGO: 1210205
IDENTIFICACIÓN: C.C. 1’019.099.620
JOSÉ MANUEL RODRÍGUEZ ROBERTO
CÓDIGO: 1211492
IDENTIFICACIÓN: C.C. 1’015.452.278
PROYECTO DE GRADO PARA OPTAR POR EL TÍTULO DE INGENIERO
MECATRÓNICO DE LA UNIVERSIDAD PILOTO DE COLOMBIA
DIRECTOR:
ING. BALDOMERO MÉNDEZ PALLARES
Ingeniero Mecánico
UNIVERSIDAD PILOTO DE COLOMBIA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BOGOTÁ, D.C.
2018

3
Bogotá 17 de septiembre del 2018.
NOTA DE ACEPTACIÓN
Una vez realizada la revisión metodológica y técnica del documento final de proyecto de grado, doy constancia de que los estudiantes han cumplido a cabalidad con los objetivos propuestos, cumplen a cabalidad con los Lineamientos de Opción de Grado vigentes del programa de Ingeniería Mecatrónica y con las leyes de derechos de autor de la República de Colombia, por tanto, se encuentran preparados para la defensa del mismo ante un jurado evaluador que considere idóneo el Comité de Investigaciones del Programa de Ingeniería Mecatrónica de la Universidad Piloto de Colombia.
Baldomero Méndez Pallares Director de Proyecto.
Jurado.
Jurado.
4
DEDICATORIA
A nuestros padres Miryam Elena Roberto, Consuelo Calderón Beltrán, José Ángel Rodríguez Beltrán y Carlos Alberto Forero quienes nos han brindado su apoyo y compañía en todo momento de nuestras vidas y así mismo nos guiaron hacia un futuro educado lleno de conocimientos para nuestro crecimiento personal y profesional. Y a nuestros hermanos Paula Valentina Rodríguez Roberto y Nicolás Forero Calderón por estar pendientes de nosotros, de nuestro progreso académico y su incondicional compañía. Y a todos nuestros familiares que nos han acompañado en este camino de la vida. A nuestros amigos y compañeros que nos brindaron su colaboración y soporte en cada parte de este proceso formativo. En el cual también nos ofrecieron su motivación, apoyo, paciencia y compañía.

5
AGRADECIMIENTOS
Primeramente, a Dios por darnos la vida, la salud y el don de la sabiduría para alcanzar cada una de nuestras metas. A la Universidad Piloto de Colombia, al programa de Ingeniería Mecatrónica y sus docentes quienes nos han aportado en el desarrollo profesional y aún más importante en nuestro crecimiento personal. Al Ingeniero Cesar Castillo de la empresa Festo S.A.S. por su tiempo y disposición en escucharnos y brindarnos ideas para el desarrollo de este proyecto. Al Ingeniero Adonay Varela y Oscar Daniel Sánchez por su colaboración y conocimientos brindados en el área de mecánica de mecanismos y así poder ejecutar a cabalidad el proyecto. Al docente Héctor Fabio Calderón quien nos acompañó, aconsejó y nos brindó sus conocimientos para el desarrollo de este proyecto. Al ingeniero Daniel Delgado por sus enseñanzas y acompañamiento en el área de modelado en 3D. Y especialmente al Ing. Baldomero Méndez Pallares nuestro director y tutor del proyecto de grado, gracias a él desde el semillero de automatización y domótica nos motivó y guio para dar continuación al proyecto del parqueadero de bicicletas automatizado.

6
TABLA DE CONTENIDO
pág.
NOTA DE ACEPTACIÓN ........................................................................................ 3
DEDICATORIA ........................................................................................................ 4
AGRADECIMIENTOS ............................................................................................. 5
LISTA DE TABLAS ................................................................................................. 8
LISTA DE FIGURAS ............................................................................................... 9
LISTA DE ANEXOS .............................................................................................. 13
INTRODUCCIÓN ................................................................................................... 14
RESUMEN ............................................................................................................. 15
ABSTRACT ........................................................................................................... 16
1. GENERALIDADES ......................................................................................... 17
1.1 PLANTEAMIENTO DEL PROBLEMA. ...................................................... 17
1.1.1 Antecedentes del problema. ............................................................... 17
1.1.2 Descripción del problema. .................................................................. 18
1.1.3 Formulación de la pregunta problema: ............................................... 18
1.2 JUSTIFICACIÓN. ...................................................................................... 19
1.3 OBJETIVOS. ............................................................................................. 20
1.3.1 Objetivo general. ................................................................................ 20
1.3.2 Objetivos específicos. ........................................................................ 20
1.4 DELIMITACIÓN DEL PROYECTO. .......................................................... 20
1.4.1 Alcances y limitaciones. ..................................................................... 20
1.4.2 Línea de investigación del programa. ................................................. 21
1.5 MARCO REFERENCIAL. ......................................................................... 22
1.5.1 Marco teórico. .................................................................................... 22
7
1.5.2 Estado del arte. .................................................................................. 29
1.6 MARCO METODOLÓGICO. ..................................................................... 34
1.6.1 Metodología preliminar. ...................................................................... 34
2. DESARROLLO INGENIERIL .......................................................................... 36
2.1 CONSIDERACIONES DE DISEÑO. ......................................................... 36
2.1.1 Caracterización de las bicicletas. ....................................................... 36
2.1.2 Propuesta de bahía de parqueo. ........................................................ 37
2.2 SELECCIÓN DE MECANISMOS. ............................................................. 39
2.2.1 Opciones para el sistema de elevación. ............................................. 39
2.2.2 Alternativas para el sistema de posicionamiento. .............................. 44
2.3 DISEÑO DE LOS SISTEMAS DE ELEVACION Y POSICIONAMIENTO. 47
2.3.1 Elección de pinza neumática. ............................................................. 47
2.3.2 Diseño de los dedos para la pinza. .................................................... 50
2.3.3 Elección del cilindro neumático con vástago. ..................................... 52
2.3.4 Designación de los actuadores neumáticos sin vástago. ................... 56
2.3.5 Viga de refuerzo. ................................................................................ 60
2.4 ANÁLISIS Y CÁLCULOS. ......................................................................... 61
2.4.1 Viga transportadora (actuador horizontal). ......................................... 61
2.4.2 Viga de refuerzo. ................................................................................ 69
2.4.3 Base giratoria. .................................................................................... 77
2.4.4 Validaciones por elementos finitos. .................................................... 87
2.5 DISEÑO Y SIMULACION DEL SISTEMA DE CONTROL. ....................... 92
2.5.1 Definición de entradas y salidas. ........................................................ 92
2.5.2 Control y simulación del sistema. ....................................................... 93
2.5.3 Animación del parqueadero. ............................................................ 104
CONCLUSIONES ................................................................................................ 107
RECOMENDACIONES ........................................................................................ 109
REFERENCIAS ................................................................................................... 110
ANEXOS .............................................................................................................. 113
8
LISTA DE TABLAS
Pág. Tabla 1. Dimensiones de los diferentes tipos de bicicletas. ................................... 37
Tabla 2. Ponderación de parámetros. .................................................................... 42
Tabla 3 Datos técnicos de la pinza PSG. ............................................................... 49
Tabla 4. Masas de los elementos a desplazar. ...................................................... 53
Tabla 5. Factor de servicio FD. .............................................................................. 54
Tabla 6. Calculo de esfuerzos cortantes y momentos flectores. ............................ 63
Tabla 7. Viga sin bicicleta. ..................................................................................... 65
Tabla 8. Viga con solo una llanta. .......................................................................... 65
Tabla 9 Propiedades mecánicas del aluminio 6063-T0. ........................................ 65
Tabla 10. Coeficientes del factor de superficie. ..................................................... 67
Tabla 11. Calculo de fatiga de la viga indeterminada. ........................................... 73
Tabla 12. Calculo de fatiga de la viga con sección variable. .................................. 76
Tabla 13. Calculo de fatiga de viga principal de la plataforma. .............................. 79
Tabla 14. Calculo de fatiga de la viga empotrada de la base giratoria. .................. 84
Tabla 15. Factores para calcular el margen compensatorio de seguridad. ............ 86
Tabla 16. Resumen de Resultados entre viga de refuerzo y viga transportadora. 88
Tabla 17. Resumen de Resultados del sistema de parqueo. ................................. 90
Tabla 18. Descripción de señales. ......................................................................... 92

9
LISTA DE FIGURAS
Pág. Figura 1. Bicicleta Endevour de E-city. ................................................................. 22
Figura 2. Bicicleta Viaggio de E-city. ..................................................................... 23
Figura 3. Bici-parqueadero en Bogotá. .................................................................. 24
Figura 4. Cicloparqueaderos para el día sin carro. ................................................ 24
Figura 5. El origen de la producción en cadena. .................................................... 25
Figura 6. PLC de la corriente continua de Mitsubishi (FX1N-60MR-D). ................. 28
Figura 7. Cilindro sin Vástago. ............................................................................... 29
Figura 8. Mini Eco Cycle capacidad 58 bicicletas. ................................................. 30
Figura 9. Cycle Tree, estación de Kasai, Japón. .................................................... 30
Figura 10. Identificador “IC tag”. ............................................................................ 31
Figura 11. Ecoparking, Medellín. ........................................................................... 32
Figura 12. Parkeo 79, Bogotá. ............................................................................... 32
Figura 13. Estructura externa de la simulación “Biking”. ........................................ 32
Figura 14. Plataforma de Elevación multi-tijera. ..................................................... 33
Figura 15. Ascensor cilindro hidráulico de doble.................................................... 34
Figura 16. BL-001. ................................................................................................. 34
Figura 17. Viga de parqueo – vista frontal. ............................................................ 38
Figura 18. Viga de parqueo – vista lateral derecha.. .............................................. 39
Figura 19. Plataforma de elevación. ...................................................................... 40
Figura 20. Tornillo sin Fin. ..................................................................................... 40
10
Figura 21. Actuadores neumáticos sin vástago. .................................................... 41
Figura 22. Contenedor de bicicleta. ....................................................................... 45
Figura 23. Poleas de transmisión. .......................................................................... 45
Figura 24. Sistema de posicionamiento neumático. ............................................... 46
Figura 25. Plataforma giratoria. Autodesk Inventor. ............................................... 47
Figura 26. Espesor de las llantas. .......................................................................... 48
Figura 27. Finger parallel grippers, pneumatic - series PSG. ................................ 49
Figura 28. Rodachina – S12 y 13. .......................................................................... 50
Figura 29. Dedo de pinza comparado con diámetros de llantas. ........................... 51
Figura 30. CAD de ensamble entre pinza y dedos. ................................................ 52
Figura 31. Medidas de los componentes de agarre. .............................................. 53
Figura 32. Cilindro neumático con vástago. ........................................................... 56
Figura 33. Ejemplo de producto. ............................................................................ 59
Figura 34 Dimensiones del parqueadero. .............................................................. 59
Figura 35. Vigas acopladas al soporte en cruz. ..................................................... 60
Figura 36. Mecanismo con bicicleta en posición inicial. ......................................... 61
Figura 37. Diagramas de esfuerzo cortante y momento flector viga transportadora.
............................................................................................................................... 64
Figura 38. Diagrama de viga hiperestática con la mayor carga. ............................ 70
Figura 39. Diagrama de esfuerzo cortante y momento flector de la viga
indeterminada. ....................................................................................................... 72
Figura 40. Viga de seccion variable. ...................................................................... 74
Figura 41. Plataforma en cruz. ............................................................................... 77

11
Figura 42. Diagrama de esfuerzo cortante y momento flector de viga principal de la
plataforma. ............................................................................................................. 78
Figura 43. Diagrama de fuerzas en la viga empotrada de la base giratoria. .......... 80
Figura 44. Formulario de deflexión para una viga en voladizo: carga intermedia. . 81
Figura 45. Formulario de deflexión para una viga en voladizo: carga uniforme. .... 81
Figura 46. Vigas que componen la viga empotrada de la base giratoria. .............. 82
Figura 47. Diagrama de cortante y momento flector de la viga empotrada de la
base giratoria. ........................................................................................................ 83
Figura 48. Tensión de Von Mises máxima entre viga de refuerzo y viga
transportadora. ....................................................................................................... 87
Figura 49. Factor de seguridad entre viga de refuerzo y viga transportadora. ....... 88
Figura 50. Desplazamiento entre viga de refuerzo y viga transportadora. ............. 88
Figura 51. Tensión de Von Mises máxima del sistema de parqueo. ...................... 89
Figura 52. Factor de seguridad del sistema de parqueo. ....................................... 90
Figura 53. Desplazamiento del sistema de parqueo. ............................................. 90
Figura 54. Tensión de Von Mises .......................................................................... 91
Figura 55. Desplazamiento de la bahía de parqueo. ............................................. 91
Figura 56. Circuito electroneumático. .................................................................... 94
Figura 57. Conexión entre FluidSIM y CoDeSys.................................................... 95
Figura 58. Interfaz – Hombre – Maquina. .............................................................. 97
Figura 59. Posición inicial del sistema de elevación y posicionamiento. ................ 98
Figura 60. Ingreso de la viga transportadora con la llanta sujetada. ...................... 98
Figura 61. Elevadores posicionados y arranque del motorreductor. ...................... 99

12
Figura 62. Paro del motor y activación de actuadores horizontales. ...................... 99
Figura 63. Liberación de cicla e inicio de retorno a posición inicial. ..................... 100
Figura 64. Retorno del sistema a posición inicial. ................................................ 101
Figura 65. Inicio del proceso de retiro de la bicicleta. .......................................... 102
Figura 66. Agarre de la bicicleta en la viga de parqueo. ...................................... 103
Figura 67. Posición inicial luego del retiro de la bicicleta. .................................... 104
Figura 68. Ingreso al sistema. .............................................................................. 105
Figura 69. Elevación de la bicicleta. ..................................................................... 105
Figura 70. Parqueadero visto desde afuera. ........................................................ 106
Figura 71. Arquitectura de las bahías de parqueo. .............................................. 107

13
LISTA DE ANEXOS
Pág.
ANEXO 1. Plano de la pinza neumática (series PSG). ........................................ 113
ANEXO 2. Especificaciones de rodachina de la pinza neumática. ...................... 114
ANEXO 3. Ficha técnica del cilindro neumático con vástago. ............................. 115
ANEXO 4. Ficha técnica del actuador neumático sin vástago, horizontal. ........... 116
ANEXO 5. Hoja de datos del actuador neumático sin vástago vertical. ............... 119
ANEXO 6 Información de material de los actuadores sin vástago ....................... 120
ANEXO 7. Datasheet Motor Nord_H74ES67 ....................................................... 121
ANEXO 8. Plano base giratoria ............................................................................ 122
ANEXO 9. Plano dedos para la pinza .................................................................. 123
ANEXO 10. Plano viga de parqueo ...................................................................... 124
ANEXO 11. Plano viga de refuerzo ...................................................................... 125
ANEXO 12. Hoja de datos del PLC Festo CPX 197330 ...................................... 126
ANEXO 13. Hojas de datos de módulos .............................................................. 127
ANEXO 14. Especificaciones de rodachina de la base giratoria. ......................... 130
ANEXO 15. Diagramas de flujo de Ingreso y retiro de una bicicleta. ................... 131
ANEXO 16. Plano ensamble total del sistema de elevación y posicionamiento. . 133

14
INTRODUCCIÓN
En los últimos años se ha visto el incremento del uso de las bicicletas en la ciudad de Bogotá debido a las constantes congestiones vehiculares. Buscando soluciones para este problema, la alcaldía mayor de Bogotá ha ampliado las ciclorutas independizándolas de las vías principales, por ende, se ha incentivado a los ciudadanos a incrementar el uso de una energía alternativa. Se denomina así debido a que este medio de transporte es una solución ecológica para los problemas de polución que se presentan en la ciudad, ya que no depende de ninguna energía contaminante porque es impulsado por tracción humana. Una problemática que se ha presentado en el uso de estos vehículos es el tema de la disponibilidad de espacios para estacionar, pues al estar en aumento el uso de la bicicleta los parqueaderos ya no dan abasto, además está el problema de la inseguridad, debido a que se presentan robos en los estacionamientos de bicicletas, ya que no cuentan con las suficientes medidas de seguridad. Una solución para esta problemática se presentó durante el primer periodo académico del año 2016, a través del proyecto de grado “Simulación en un entorno virtual de un estacionamiento de bicicletas en la Universidad Piloto de Colombia” [1], el cual llegó hasta los cálculos mecánicos del acceso de la recepción y entrega de la bicicleta, además de mostrar la simulación del funcionamiento y el desarrollo del sistema de control. El siguiente objetivo sería la continuación de este trabajo, teniendo en cuenta los cálculos mecánicos y el desarrollo del control del mecanismo de elevación y posicionamiento de las bicicletas; para la justificación y veracidad de los cálculos obtenidos es la validación de elementos finitos. Además, se mostrará por medio de una animación el funcionamiento interno del parqueadero. Se respetarán varios procedimientos planteados por el primer proyecto de grado; en primer lugar, como lo es la energía electroneumática a partir de ello se adecuarán cada uno de los artefactos necesarios para el correcto funcionamiento del parqueadero, uno de ellos la selección del controlador PLC que actúa como el cerebro del sistema, la estructura, los resultados de los QFD, entre otros; a medida que se va desarrollando se irán mencionando estos procesos.
15
RESUMEN
El propósito de este proyecto de grado es continuar con la temática “Simulación en un entorno virtual de un estacionamiento de bicicletas en la Universidad Piloto de Colombia” con el fin de enfatizar en la esencia del mecanismo; este es el sistema de elevación y posicionamiento para el parqueadero de bicicletas automático. Analizando diferentes mecanismos de desplazamiento vertical y horizontal se llega a la conclusión de escoger la electroneumática como energía principal para el sistema. Seguidamente, se empieza a diseñar, escoger y adecuar cada una de las partes que compone el parqueadero. Con el objetivo de brindar seguridad y calidad al bici-usuario. Cada una de las partes son planeadas teniendo como prioridad los modelos de diferentes clases de bicicletas, a partir de allí se diseña las piezas correspondientes para optimizar la elevación, desplazamiento y rotación dentro del parqueadero. Luego, se hacen los cálculos mecánicos debidos para corroborar que todo está dentro del margen de un diseño excelente. Además, se comparan los resultados con las validaciones de elementos finitos en Inventor. Posteriormente, se diseña el sistema de control y visualización, para la cual se utiliza FluidSIM para el circuito eléctrico, también se determina que el mejor controlador para el sistema es el PLC, ya que muchos de los componentes funcionan con energía neumática como es el caso de los actuadores y pinzas, para la programación y visualización se utiliza CoDeSys, ya que esta plataforma de programación permite interactuar con FluidSIM a través de un servidor OPC, además de generar la HMI (Human Machine Interface).

16
ABSTRACT
The purpose of this graduation project is to continue with the theme "Simulation in a virtual environment of a bicycle parking at the Pilot University of Colombia" in order to emphasize the essence of the mechanism; This is the elevation and positioning system for automatic bicycle parking. Analyzing different mechanisms of vertical and horizontal displacement, we come to the conclusion of choosing the eletropneumatics as the main energy for the system. Then, we begin to design, choose and adapt each of the parts that make up the parking lot. With the aim of providing safety, quality and comfort to the bike-user. Each of the parts are idealized with the priority of models of different kinds of bicycles, from there the corresponding parts are designed to optimize the elevation, displacement and rotation within the parking lot. Then, mechanical calculations are made to corroborate that everything is within the margin of an excellent design. In addition, the results are compared with the finite element validations in Inventor. Subsequently, the control and visualization system is designed, using FluidSIM for the electrical circuit, it is also determined that is the best control system for PLC, also many of the components work with pneumatic energy, such as the case of actuators and clamps. CoDeSys is used for programming and visualization, because this programming platform allows interacting with FluidSIM through an OPC server, in addition it makes easier the HMI (man-machine interface).

17
1. GENERALIDADES
1.1 PLANTEAMIENTO DEL PROBLEMA.
1.1.1 Antecedentes del problema. En los últimos años se ha visto el
incremento del uso de las bicicletas en la ciudad de Bogotá debido a las constantes congestiones vehiculares. Hoy en día aproximadamente el 10% de los ciudadanos usa la bicicleta [2] con registros de 700.000 viajes por día [3] tomando como este una alternativa de transporte más sostenible y ecológico; Bogotá cuenta con una infraestructura urbanas de carriles exclusivos para la circulación de bicicletas con un total de 120 kilómetros de ciclovía [4] y 500 kilómetros de ciclorutas [5]. Por esta razón la empresa de Transmilenio ha creado los “Cicloparqueaderos” para que los usuarios se conecten con el sistema y a la vez obtengan seguridad y accesibilidad con su bicicleta. Pero no todo ha sido positivo para la ciudad. En el 2017 se registraron 382 hurtos entre el 1 enero hasta el 7 de marzo, mientras que este mismo año se ha registrado 879 en el mismo periodo, significa que hay un incremento del 130% de hurtos de bicicletas en Bogotá, en promedio 8 bicicletas diarias. Bogotá cuenta 15 cicloparqueaderos gratuitos del sistema de Transmilenio con un total de 4417 cupos disponibles; estos parqueaderos tienen un horario de atención horario de 5:00 a.m. a 12:00 a.m. Además, se dispone de algunos cicloparqueaderos cercanos a las estaciones uno de ellos se encuentra en la estación de Alcalá. El horario de atención es de 6:00 a.m. - 7:00 p.m. [6]. Para el registro de la bicicleta se debe llevar la cedula de ciudadanía, la cadena o candado; los datos a registrar son el nombre del usuario, número de celular, color de la bicicleta y el número de bahía donde ubico la bicicleta. La permanencia de la bicicleta solo puede ser de 24 horas, sino “se considera abandonado; por tal motivo será puesto a disposición de las autoridades competentes” [6]. “El aumento de la población que utiliza la bicicleta como alternativa de transporte de la ciudad ha generado que la administración ponga sus ojos en los bici-usuarios. La inseguridad y la infraestructura son los problemas que más los aquejan y necesitan pronta solución” [7]. Para ello quieren impulsar un proyecto para crear el consejo distrital de la bicicleta. Con el fin de reducir la tasa de hurtos en la ciudad e incitar para que hallan mejoras y nuevas construcciones de infraestructuras. Destacando “Suba, Usaquén y Engativá, las localidades en donde más se concentran este tipo de actos delictivos” [7]. Encaminado a dar solución de la necesidad de parqueaderos para bicicletas que maximicen la utilización de espacios las estudiantes Pilar Estefani Acosta Otálora y Lina María León Ceballos enfocaron su tesis a la automatización de un

18
parqueadero de bicicletas, como título de su proyecto de grado “Simulación en un entorno virtual de un estacionamiento de bicicletas en la Universidad Piloto de Colombia” [1], este proyecto se fue desarrollando dentro el semillero de investigación: Automatización y Domótica con el director Baldomero Méndez Pallares, en el mismo semillero se muestra el interés de continuar la investigación apoyados con el director, teniendo como enfoque específico la elevación y el posicionamiento en el parqueadero de bicicletas.
1.1.2 Descripción del problema. Hace 41 años se realizó el primer ensayo de
lo que conocemos hoy como “Ciclovía”, fue la primera vez que los Bogotanos se lanzaron a las calles para apropiarse de un espacio exclusivo para los vehículos automotores [8].Hoy en día” Bogotá es la ciudad latinoamericana con más cantidad de ciclovías de la región”, con 500 kilómetros, 10 % de su población que usa la bicicleta [5]. Los ciudadanos usan este medio de transporte para evitarse la congestión del tráfico, pero lamentablemente ha incrementado los robos de estos vehículos hasta en los bici-parqueaderos de Transmilenio. Como consecuencia a la falta de organización y seguridad de los parqueaderos que ofrece la ciudad; ahora, transcurre un gran flujo de usuarios guardando sus bicicletas dentro de los parqueaderos y así mismo para retirarlas; de estas se pierde la contabilidad y el estado de las bicicletas. En motivo a esta problemática las estudiantes Pilar Acosta y Lina León propusieron en su proyecto un parqueadero de bicicletas automatizado para la Universidad Piloto de Colombia, en este trabajo se desarrolló la simulación de un entono virtual del estacionamiento, los cálculos mecánicos de la entrada y retiro de bicicletas [1]. El trabajo que continuar del proyecto de grado es el diseño mecánico, el control del sistema la elevación y posicionamiento de las bicicletas con base a los parámetros de la estructura del parqueadero.
1.1.3 Formulación de la pregunta problema: Partiendo del proyecto de grado
del parqueadero “Biking” a continuación, se quiere plantear y diseñar un sistema de elevación y posicionamiento de este parqueadero, observando los anteriores sistemas, surge la siguiente pregunta. ¿Cómo diseñar y realizar una simulación de un sistema de elevación y posicionamiento que permita mostrar el parqueo automatizado de las bicicletas?

19
1.2 JUSTIFICACIÓN. La finalidad general del proyecto es la de brindar más seguridad a los ciudadanos que usan la bicicleta como su medio para transportarse de un lugar a otro; el problema primordial que afecta a los usuarios de este vehículo son los constantes robos. “El año pasado, según cifras de la entidad, fueron hurtadas en Bogotá 3.133 bicicletas, lo que indica que, en promedio, diariamente son robados al menos ocho de estos vehículos en la ciudad. Y de acuerdo con las estadísticas de la Policía, a mayo de este año, se habían reportado 1.569 robos de bicicletas.” [7] Una de las principales razones de estos robos es por la poca seguridad de los parqueaderos, así como lo indica textualmente la periodista Marcela Apolinar: “La denuncia más registrada en la capital relacionada con el robo de bicicletas es el que se comete en parqueaderos públicos y residenciales. La protección con candado no es suficiente para espantar a los delincuentes, que aprovechen cualquier oportunidad para hurtar las bicicletas o las partes de ella.” [9] El parqueadero automatizado es una buena solución para poder disminuir la gran cantidad de robos de bicicletas que se presentan en la ciudad, por esta razón el proyecto en su fase uno desarrolló la simulación virtual de un estacionamiento automatizado para bicicletas ambientado para la Universidad Piloto de Colombia. Dicha simulación demostró ser una buena alternativa para la solución del problema que se presenta con el tema de los robos, sin embargo, esta primera fase se enfocó más en la recepción y el retiro de la bicicleta del parqueadero, es por esto por lo que se ha tomado la decisión de continuar el proyecto realizando una simulación, esta vez orientada a la parte interna del parqueadero encargada de la elevación y el posicionamiento de las bicicletas en sus respectivas bahías. Teniendo en cuenta lo mencionado, la finalidad especifica del proyecto es la de continuar y mejorar los aspectos débiles que se observaron en la simulación de la fase 1, incorporando una nueva fase en la que se detallará principalmente el mecanismo de elevación y posicionamiento; el cual asegurará las condiciones necesarias para su correcto funcionamiento. Ya sea desde buscar la bahía que se encuentre disponible, hasta transportar la bicicleta hasta su destino sin que esta sufra algún daño. Con este ingenioso servicio el usuario podrá empezar a usar su bicicleta, con la seguridad de que no habrá peligro de perderla o de dañarla al momento de estacionarla, ya que el parqueadero contará con un buen sistema tanto de seguridad como de transporte y ubicación, los cuales serán cuidadosamente diseñados para brindar tranquilidad y satisfacción al usuario.
20
1.3 OBJETIVOS.
1.3.1 Objetivo general. Diseñar y realizar una simulación de un sistema de elevación y posicionamiento para un parqueadero de bicicletas automatizado.
1.3.2 Objetivos específicos.
Analizar los diferentes mecanismos electromecánicos, los cuales permitirán escoger el sistema de posicionamiento y elevación más adecuado para el parqueadero de acuerdo con la infraestructura propuesta.
Realizar los respectivos cálculos mecánicos y selección de componentes
electrónicos para cada parte del sistema de desplazamiento y ubicación de
las bicicletas.
Diseñar y simular el circuito electroneumático y la programación para el
control del prototipo.
Realizar las validaciones del funcionamiento a cada uno de los sistemas construidos basados en los resultados obtenidos de elementos finitos.
1.4 DELIMITACIÓN DEL PROYECTO.
1.4.1 Alcances y limitaciones.
1.4.1.1 Alcances. El proyecto propuesto tiene como alcance el diseño y simulación del mecanismo y control de la elevación y posicionamiento de un parqueadero de bicicletas automatizado, como veracidad de los cálculos obtenidos se hará las validaciones a de cada uno de los sistemas construidos basados en los resultados obtenidos de elementos finitos, este proyecto de grado será la segunda parte de la tesis “SIMULACIÓN EN UN ENTORNO VIRTUAL DE UN ESTACIONAMIENTO DE BICICLETAS EN LA UNIVERSIDAD PILOTO DE COLOMBIA”, con el fin de mejorar y avanzar en este tema de interés.
21
1.4.1.2 Limitaciones. El periodo de tiempo del diseño y desarrollo de la simulación del sistema comprende un año de duración.
1.4.2 Línea de investigación del programa. El sistema que se quiere construir, es un sistema de agarre y de desplazamiento. Por lo tanto, es un sistema enteramente electromecánico guiado por un código de programación. Es por esto por lo que se ha seleccionado la línea de Automatización y domótica ya que el propósito es utilizar implementos de tipo electroneumático para algunos sectores del mecanismo, como bien puede ser el sistema de agarre de la bicicleta. Así mismo la finalidad general del proyecto es automatizar la parte interna de un parqueadero de bicicletas.

22
1.5 MARCO REFERENCIAL.
1.5.1 Marco teórico. Con la finalidad de simular un mecanismo funcional y en buen estado, es necesario revisar algunos conceptos esenciales para el proyecto, los cuales permitirán entender con mayor detalle tanto la funcionabilidad de este como la parte de automatización aplicada al parqueadero de bicicletas. Inicialmente se hablará del eje principal del proyecto que son las bicicletas:
1.5.1.1 La bicicleta eléctrica. Este tipo de bicicleta resalta entre las demás ya que cuenta con una gama de artefactos que le permiten cumplir ciertas funcionalidades, siendo la principal el poder transportar de un lugar a otro con mayor facilidad y sin ningún esfuerzo, ya que la misma bicicleta es la generadora del movimiento sin la necesidad de pedalear [10].
Algunos beneficios de la bicicleta eléctrica son: es amigable con el medio ambiente, evita las cogestiones vehiculares, ahorro de tiempo, facilidad de pedaleo en diferentes tipos de terreno y de igual modo asistencia con las personas que padecen de algún problema de salud [11].
Figura 1. Bicicleta Endevour de E-city.
Fuente: Autores. En la figura 1 se presenta una bicicleta eléctrica de la marca E-City la cual es catalogada como una de las mejores dentro de su marca ya que reúne con las siguientes características:

23
- Marco en aluminio. - Peso producto: 35 Kg. - Autonomía promedio con pedaleo asistido: 50Km. - Luz frontal LED y stop trasero de batería. - Tablero LCD indicador de velocidad, recorrido, nivel de asistencia y batería. - Freno de disco adelante y atrás marca Tektro. - Luz LED frontal. - Pacha de 7 cambios marca Shimano. - Acelerador de palanca.
Sin embargo, entre los productos de esta misma marca se encontró una bicicleta que presenta una característica muy llamativa como lo es su peso ya que es de 55 Kg, la bicicleta más pesada encontrada hasta el momento la cual se detalla a continuación: Figura 2. Bicicleta Viaggio de E-city.
Fuente: http://www.motor.com.co/actualidad/industria/akt-pedalea-negocio-ciclas-electricas/28912
- Autonomía promedio con pedaleo asistido: 30Km/h. - Peso de la cicla: 55 Kg. - Sillín para pasajero. - Luz frontal. - Bloqueo de llanta trasera con llave (antirrobo). - Canasta Frontal con tapa. - Pantalla digital para ver nivel de carga. - Garantía 6 meses (motor, controlador, batería, chasis).
Por otro lado, como se puede evidenciar en las anteriores descripciones estas bicicletas presentan algunas desventajas como: El gran incremento en el peso

24
debido al motor y a la batería, mayor dificultad en su mantenimiento y un costo más elevado.
1.5.1.2 Parqueadero de bicicletas. Son áreas tanto públicas como privadas destinadas para guardar y proteger un vehículo que se encuentre sin uso por un determinado tiempo. En el caso de las bicicletas estos espacios son principalmente en lugares públicos o módulos que se encuentran en la calle sin ninguna supervisión, es decir que no cuentan con ningún tipo de seguridad a parte del candado que porta el usuario. Generalmente los módulos que se usan para estacionar las ciclas, son unos soportes metálicos anclados en el piso en el cual se amarra la llanta con una cadena y un candado como en la Figura 3, también otro tipo de parqueadero son unos ganchos adheridos en alguna pared o reja en los que se cuelgan verticalmente las bicicletas enganchando alguna de sus llantas, así como se muestra en la figura 4. Figura 3. Bici-parqueadero en Bogotá.
Fuente:https://www.elespectador.com/noticias/bogota/los-centros-comerciales-de-bogota-usureros-los-ciclista-articulo-478844 Figura 4. Cicloparqueaderos para el día sin carro.
Fuente:http://www.oab.ambientebogota.gov.co/apc-aa/view.php3?vid=265&cmd[265]=x-265-9762
Como se puede apreciar en las dos imágenes, ambos sistemas de parqueo al exceder su límite de bicicletas y así mismo al no tener una buena estructura para el sostenimiento de estas, pueden provocar peladuras y daños en las partes de los vehículos. Así mismo como se mencionó anteriormente el parqueadero no

25
presenta ninguna medida de seguridad, sino que tan solo cuenta con un candado para cada bicicleta.
1.5.1.3 Automatización. Es la capacidad que tiene un proceso físico para poder actuar de forma autónoma o por sí mismo, esta cualidad se logra con la implementación de sistemas mecánicos, eléctricos y de control. Principalmente la automatización es implementada en la industria para desarrollar procesos de producción de manera autónoma, en estos procesos lo que prima es la inteligencia artificial buscando mayor comodidad para los operadores, así mismo su propósito también es el de mejorar el proceso de fabricación de un producto cuidando y mejorando parámetros como cantidad, gestión, calidad, etc. [12] Figura 5. El origen de la producción en cadena.
Fuente: https://www.ait.com.ar/es/blog/origen-produccion-cadena
Clases de automatización. Actualmente existen 4 clases de energía para la automatización usadas en la industria, se mencionan todas con una corta definición, pero se hace énfasis en la neumática, ya que esta es la que se implementara para el sistema de elevación y posicionamiento del parqueadero de bicicletas automatizado.
Hidráulica. Esta técnica se refiere a aquellas máquinas que son propulsadas por la acción de algún fluido líquido, todo el proceso de estas máquinas depende de la configuración de presión que tenga en cada uno de sus puntos. Para poder conseguir una óptima relación entre la potencia y la aceleración del artefacto se pueden usar varios tipos de fluidos unos más viscosos que otros.

26
Mecánica. La maquinaria que usa esta clase de automatización funciona convirtiendo la energía eléctrica en energía mecánica, de esta manera logra obtener movimiento para hacer las acciones programadas por el operador.
Electrónica. Este sistema se enfoca más que todo en motores, resistencias, condensadores, sensores, actuadores electromagnéticos, entre otros y su controlador generalmente es con el funcionamiento de relés. Este procedimiento no solo sirve para la industria, también es aplicado en robótica ligera como en juguetería, electrodomésticos, etc. [13]
Neumática. Este sistema es similar al hidráulico, pero en vez de usar sustancias liquidas se utiliza aire comprimido como propulsor. Existen dos clases de componentes que conforman un circuito neumático, los que almacenan el aire y los que lo consumen para poder actuar; las productoras se denominan compresores y son las que toman el aire y lo comprimen comúnmente a 6 bares de presión, enviándolo hacia cada punto generador de movimiento de la máquina, este proceso es determinado por la programación que se haya asignado. [14]
De la sinergia de esta energía con la eléctrica nace la electroneumática que es un proceso en el que la energía eléctrica se encarga de enviar y recibir señales para el correcto control de la maquinaria, brindándole así un funcionamiento óptimo y un bajo índice de error. El procedimiento consiste en transformar dichas señales eléctricas en energía neumática, la cual será la encargada de dar movimiento a los actuadores de la máquina en el orden y tiempos correctos, programados por el operario. Esto se logra con la intervención de dispositivos especiales encargados de hacer dicha transformación, algunos de estos dispositivos se mencionan a continuación. [15]
Elementos eléctricos.
- Dispositivos de retención: Conocidos como pulsadores o interruptores son aquellos elementos encargados de enviar la señal para dar inicio o fin a un proceso, también se puede usar para casos de emergencia.
- Válvula Electroneumática: Este dispositivo es el encargado de
transformar la energía eléctrica presentada en las señales que emiten los relevos en energía neumática para luego enviarla a los actuadores. Internamente posee una válvula de aire unida a una bobina en la que al pasar una corriente esta provoca un campo magnético, el cual realiza el cambio de trabajo.
27
- Relevadores: Este implemento tiene como función operar las señales de encendido y de apagado (On, Off) en el sistema y de igual manera enviarlas a las válvulas, las cuales reaccionaran dependiendo de su información. Internamente lo que le permite el funcionamiento a un relevo es una fila de contactos, que pueden ser con normalidad abiertos o normalmente cerrados y también una bobina que al igual que la válvula, al pasar corriente por esta, creara un campo magnético que causara el cambio de estado en los contactos.
- Interruptores de final de carrera: Este componente es un sensor de tipo
mecánico cuya misión en un sistema automatizado es percibir cuando hay algún elemento presente o si está ausente. [15]
- Sensores: Un sensor es un dispositivo eléctrico diseñado para percibir
magnitudes físicas del mundo real; transformar estas magnitudes en señales eléctricas, las cuales en este nuevo estado podrán ser manipuladas y enviadas al PLC, quien dependiendo de su programación y de lo que reciba del sensor, enviara una orden a los actuadores, estos se clasifican así:
Sensores inductivos: Producen por si mismos su campo magnético y son útiles para detectar algún objeto metálico sin necesidad de hacer contacto.
Sensores capacitivos: Son capaces de detectar cualquier tipo de material mediante un campo electrostático.
Sensores magnéticos: Se activa al estar cerca de algún objeto magnético y/o metálico.
Sensores opto-eléctricos: Estos funcionan con la ayuda de las propiedades de las ondas luminosas, como la reflexión, la refracción, etc. [16]
1.5.1.4 PLC (Controlador Lógico Programable). Es un dispositivo que
tiene la función de ser el cerebro de un proceso automatizado, es decir es el encargado de controlar paso por paso las funciones de cada uno de los implementos mencionados anteriormente, con la finalidad de realizar los objetivos propuestos en su programación. Básicamente el proceso que realiza es el de leer las entradas y salidas y conforme a los datos que estas contengan realiza la ejecución de su programa, primeramente, examina los datos que llegan a sus entradas, seguido de esto

28
escoge la decisión correcta de acuerdo con los parámetros de su algoritmo y los almacena en su memoria. Finalmente dependiendo de los resultados que obtenga en su análisis, envía por sus salidas las órdenes a los elementos actuadores. [17] Figura 6. PLC de la corriente continua de Mitsubishi (FX1N-60MR-D).
Fuente: http://es.made-in-china.com/co_szhailan-china/image_Mitsubishi-DC-Power-PLC-FX1N-60MR-D-_hooiuggig_PZHthwoFLUby.html
- Ventajas y desventajas. A continuación, se mencionan algunas de las ventajas y desventajas que tienen estos controladores:
Ventajas:
Reducción de costos en mano de obra ya que las maquinas se encargarán de hacer la mayor parte de los procesos.
Mayor rapidez en la elaboración de proyectos comparándolos con otros sistemas de automatizado.
Un mejor sistema de monitoreo que ayuda a detectar daños rápidamente.
Posibilidad de controlar varias máquinas con un solo sistema y así mismo si una de estas máquinas se avería, el PLC continúa controlando las demás máquinas.
Con el óptimo orden en el cableado hace que la instalación sea sencilla y así mismo acorta tiempos de instalación y ocupa menos espacios.
Desventajas:

29
Es necesario contratar personal especializado en el uso de estos dispositivos, lo cual incrementa costos.
Los costos para hacer esta inversión son elevados.
Se debe tener todo muy bien realizado, tanto en la maquinaria como en el programa para que todo salga correctamente. [17]
1.5.1.5 Actuador neumático sin vástago. Figura 7. Cilindro sin Vástago.
Fuente: https://es.slideshare.net/jvelasquezc/neumtica-industrial El actuador sin vástago es un cilindro neumático que cuenta con un pistón en su interior el cual se desplaza por un tubo de aluminio con longitud de la carrera deseada para cumplir la necesidad del usuario, este cuenta con un carro guiado en el que se fija la carga y es movido por el cuerpo. Para impedir el escape de aire de este dispositivo es asegurado por dos bandas y sus juntas que proporcionan la máxima estanqueidad. Son idóneos para grandes carreras o desplazamientos y el volumen de montaje está prácticamente limitado a la carrera [18].
1.5.2 Estado del arte. Con el transcurrir del tiempo se ha visto el incremento de personas que usan la bicicleta en la ciudad, que a su vez también ha aumentado la cantidad de usuarios que buscan donde estacionarla; pero como es frecuente, ¡Es imposible encontrar un espacio convincente! en el que se pueda contar con buena seguridad para la bicicleta. Por esta razón muchos profesionales han evaluado, planeado, hasta construido un espacio para poderlas ubicar y dar una solución para el usuario. En perspectiva del desarrollo a los parqueaderos de bicicletas hoy en día se habla de la cuarta generación, que corresponde brindar más beneficios con sistemas inteligentes al bici-usuario, después de todo, no se ha implementado acá en Colombia ese tipo de parqueaderos exclusivos para bicicletas. Actualmente las ciudades se van desarrollando y exige un poco más de ingeniería, de un desarrollo

30
potencial. ¿Cómo podría ser un parqueadero de acuerdo con el desarrollo que exigen hoy en día las ciudades de Colombia? Analizando las tecnologías en cuarta generación en parqueaderos de bicicletas se puede observar como Eco Cycle en Japón, “es una visión de almacenamiento masivo de bicicletas”, para lugares de poca área y sean sísmicos. Almacena hasta 204 bicicletas, su recorrido de entrega puede durar hasta 13 segundos, la construcción es eficiente en un promedio de duración de dos meses y medio, el área máxima es de 24,9 bikes/m2. A cada usuario le entregan una tarjeta “CI” con el registro del tag de la bicicleta [19]. Figura 8. Mini Eco Cycle capacidad 58 bicicletas.
Fuente: http://www.ecocycle.co.uk/models/ Otro sistema entre ellos mayorista, es Cycle Tree tiene 85 parqueaderos en 14 lugares de Japón, con un total de almacenamiento de 17323 bicicletas, es antisísmico, subterráneo, están ubicados en su gran mayoría junto a estaciones de tren, su objetivo es ubicarlo en espacios pequeños y que no incomoden a la visibilidad de los usuarios, cada cliente le entregan una tarjeta magnética ”CI” y cada bicicleta tiene una IC tag para ser registrada y ubicada dentro el sistema [20]. Figura 9. Cycle Tree, estación de Kasai, Japón.

31
Fuente: http://www.jfe-eng.co.jp/en/products/comfortable/multi/mul01.html Figura 10. Identificador “IC tag”.
Fuente: http://www.jfe-eng.co.jp/en/products/comfortable/multi/mul01.html En relación con esta misma tecnología, en Colombia se han creado 3 parqueaderos automáticos de automóviles, el primero fue por Eco Parking con el Centro Comercial Oviedo en Medellín, con una capacidad de 210 vehículos en donde la descarga de estos es en 2 minutos, con la colaboración de ingenieros asiáticos [21], otro parqueadero lo podemos encontrar en Bogotá en la carrera 15 con calle 79, se llama “Parkeo 79”, la empresa que dirigió la construcción del parqueadero fue A Korn Arquitectos S.A.S con solo catorce mil millones, 11 meses de construcción y 450m2, logró 45 cubículos, con un tiempo de entrega de 1 a 2 minutos [22], también la empresa Parking Experts encargada de la construcción de parqueaderos automatizados con un modelo de plataforma giratoria, este cuenta con plataformas galvanizadas, 15 niveles de parqueo, sistema de control por PLC y sistemas de seguridad electrónicos e hidráulico [23].

32
Figura 11. Ecoparking, Medellín.
Fuente:http://blogthinkbig.com/ecopraking/
Figura 12. Parkeo 79, Bogotá.
Fuente:http://www.elespectador.com/
vivir/autos/el-primer-parqueadero-
robot-de-bogota-articulo-644852
Con la misma perspectiva de este proyecto, la empresa Parking Experts detalla su sistema para autos, “Plataforma Giratoria” el cual es recomendado para áreas pequeñas y logra el control de maniobras de manera sencilla [24]. Además, la empresa Perfect Parking tiene un modelo de parqueadero “TPP-2mini”, este es de instalación fácil y sencilla, su velocidad de elevación es de 40 a 50 segundos con un motor de cilindro vertical, trabaja a 380 V de 50Hz [25]. De igual forma la empresa JFE Engineering con el Cycle Tree es uno de los sistemas de parqueadero de bicicletas automáticos, en el cual cada bicicleta tiene un “IC Tags” para el registro y ubicación de esta, el sistema es tipo anillo, subterráneo, con un eje central giratorio para la ubicación de las bicicletas [26]. Estos proyectos traen seguridad, comodidad y velocidad a los usuarios con sus vehículos que a su vez aportan al medio ambiente y contribuyen a una sociedad más sostenible. El proyecto que se va a dar continuación es del parqueadero de bicicletas automático Biking, la finalidad de este trabajo es la simulación de un entorno virtual de un estacionamiento de bicicletas para la Universidad Piloto de Colombia, el diseño que propusieron se compone de varias columnas con un eje fijo en el centro para la elevación de las bicicletas. Figura 13. Estructura externa de la simulación “Biking”.
33
Fuente: Proyecto de grado “simulación en un entorno virtual de un estacionamiento de bicicletas en la universidad piloto de Colombia”. El sistema de posicionamiento que plantearon, fue un sistema piñón-cremallera que se desplaza por un riel y el sistema de elevación es atreves de un eje fijo central giratorio; para la ubicación de la bicicleta será por sensores y la programación por el PLC, para el retiro de la bicicleta solo hay que mostrar la tarjeta al panel de control, está será ubicada y traída por el sistema [1]. Es interesante estudiar los mecanismos de elevación de vehículos ya que se pueden relacionar en varios aspectos a los de las bicicletas, se pueden encontrar varios modelos, pero ¿Cuál sería el más adecuado para la elevación de bicicletas? Como estos podemos encontrar la plataforma de elevación multi-tijera, tiene 2 brazos o más en forma de tijera en superposición, muy resistente, el tamaño es según las dimensiones del vehículo y este tipo de elevadores también se utilizan para carga de material de construcción [27]. Otro tipo de elevador es el Ascensor cilindro hidráulico doble, tiene capacidad de carga de 3200Kg, fabricado en China, tiempo se subida de 50 a 40 segundos, altura de elevación 1,8m, potencia 2,2 KW, bajo consumo de energía y bajo volumen de funcionamiento [28]. También se encuentra el dispositivo BL-001 el cual utiliza una cuerda y un sistema de polea, puede llevar hasta 20Kg a 4m de altura, en acero, simplemente ahí que anclar los ganchos y tirar de la cuerda, utilizado para lugares de poco espacio [29]. Figura 14. Plataforma de Elevación multi-tijera.

34
Fuente:http://www.sklift.com/proshow/IpC5.html Figura 15. Ascensor cilindro hidráulico de doble.
Fuente:http://qdtelian.en.alibaba.com/product/1628744683-220900448/Intelligent_Two_Post_Double_cylinder_Gantry_Hydraulic_Lift.html
Figura 16. BL-001.
Fuente: https://spanish.alibaba.com/product-gs/bike-lift-630255807.html Considerando que la bicicleta es un vehículo pequeño, ligero y de diferentes tipos ahí que pensar de un mecanismo no tan robusto, que no consuma tanta energía y sea rápido. Para ello hay variedad de prototipos que no son exclusivamente de bicicletas, pero se puede tomar los principios de estas ingenierías, con el fin de diseñar un parqueadero de bicicletas automático y sostenible enfocando al desarrollo de la urbanización en Colombia.
1.6 MARCO METODOLÓGICO.
1.6.1 Metodología preliminar.

35
Basados en los conocimientos adquiridos durante el transcurso de toda la carrera se desarrollará el sistema automatizado de elevación y posicionamiento de bicicletas, al cual se le aplicaran las ramas de la mecánica, la programación y la automatización. Inicialmente se realizará una caracterización general de los diferentes tipos de bicicletas haciendo énfasis en los nuevos modelos que han salido en el mercado, en dicho proceso se tendrá en cuenta aspecto como las dimensiones de las ciclas y las masas de cada una de estas. Este procedimiento se realizará con el fin de estipular parámetros para el dispositivo de agarre de la bicicleta y así mismo para dimensionar las diferentes estructuras que conforma el parqueadero. Dicho agarre se llevará acabo con una pinza neumática al que se le implementará un sensor de presión que determinará el cierre adecuado de la pinza dependiendo de la bicicleta que estará ingresando. Posteriormente, se seleccionarán los dispositivos más adecuados para llevar acabo las diferentes funciones tales como: desplazamiento, posición y elevación. Para el desplazamiento se usará un actuador neumático sin vástago que con la ayuda de una masa móvil transportará la bicicleta de la entrada hasta su bahía de parqueo y viceversa. Este mismo mecanismo se aplicará para el sistema de elevación, aunque para este caso al requerir un mayor esfuerzo será necesario el uso de dos actuadores ubicados paralelamente. Finalmente, para lograr la rotación del sistema se implementará una plataforma giratoria en forma de cruz, la cual será accionada por medio de un motor con su respectivo sistema de reducción; esta base contará con una rodachina en cada de sus puntas que facilitará el desplazamiento de esta y reducirá esfuerzos en el motor. A estos aspectos mencionados se les aplicarán los conocimientos adquiridos en el área de mecánica para realizar sus respectivos cálculos estructurales y de esta manera verificar que los dispositivos seleccionados cumplen con las condiciones necesarias. También, se validarán estos cálculos con los modelos en 3D proporcionados por las diferentes empresas y estos serán analizados con el programa Autodesk Inventor; además se aprovecharán estos modelos para realizar una animación en la que se podrá mostrar el funcionamiento del parqueadero. Este artefacto funcionará con electroneumática como fuente de energía principal y será simulado con el programa FluidSIM el cual estará conectado con CoDeSys quien le enviará el algoritmo para que se cumpla el propósito principal del estacionamiento.
36
2. DESARROLLO INGENIERIL
2.1 CONSIDERACIONES DE DISEÑO.
2.1.1 Caracterización de las bicicletas. De acuerdo con lo mencionado anteriormente en la justificación y alcances del proyecto y dando continuidad a la fase I del bici-parqueadero, donde se especificó la arquitectura del estacionamiento según las medidas tomadas de los diferentes

37
tipos de bicicletas. Ahora con el aumento del uso de bicicletas, los fabricantes se han dado la tarea de sacar nuevos modelos, incluyendo bicicletas con tracción eléctrica, por lo anterior, se realizó una modificación en las dimensiones de dicha estructura. Considerando los nuevos tamaños encontrados, se hace necesario rediseñar algunos componentes estructurales que dependen de las medidas de las bicicletas, como lo es la bahía de parqueo. Teniendo en cuenta estas características, en el presente desarrollo Ingenieril, se considerará el diseño de una viga de manera que actué como bahía, donde reposará la bicicleta durante su periodo de parqueo, además se diseñará el sistema de sujeción y traslado de la cicla a la zona de parqueo. Por ello se realizó una nueva investigación de los diferentes tipos de bicicletas teniendo en cuenta antiguas y nuevas donde se encontraron las siguientes medidas mostradas a continuación: Tabla 1. Dimensiones de los diferentes tipos de bicicletas.
Alto(m) Largo(m) Ancho(m) Ø Llanta(m) Peso(Kg) Espesor llanta(m)
Niño 0,68 1,1 0,54 0,4 9,5 0,045
BMX 0,96 1,45 0,58 0,5 12,7 0,05
Urbana 1,08 1,7 0,67 0,67 18,3 0,06
Carrera 0,94 1,64 0,59 0,68 12,3 0,023
Montaña 0,97 1,75 0,67 0,66 15,4 0,06
Carretera 0,98 1,68 0,33 0,67 10,9 0,025
Plegable 1 1,47 0,53 0,49 15 0,04
Eléctrica 1,07 1,86 0,635 0,66 22 0,05
Fat 1,3 2,2 1,16 0,75 30 0,12
Viaggio 1,1 2,1 0,7 0,5 55 0,05
Fuente: Autores.
2.1.2 Propuesta de bahía de parqueo. Teniendo en cuenta que la presente bahía no corresponde a esta fase del proyecto se decide realizar únicamente el bosquejo ya que es necesaria para poder realizar la simulación del parqueadero; se asumen las medidas teniendo en cuenta algunas dimensiones de las bicicletas mostradas en la tabla 1, sin embargo, se recomienda para una futura fase del proyecto realizar los respectivos cálculos estructurales que se requieren para determinar la viga más adecuada.

38
Para llevar a cabo el diseño de la bahía de parqueo se tuvieron en cuenta las medidas del largo de la bicicleta y el espesor de la llanta, donde se encontró que la longitud máxima es de la bicicleta Fat con 2,2 metros el cual indica el largo que tendrá la viga de parqueo. Sin embargo, con el fin de respetar el ancho de la estructura establecida en la primera fase del estacionamiento solo se permitirá el ingreso de bicicletas con una longitud máxima 1,9 metros, ya que al permitir una de mayor tamaño se incrementa el diámetro de la estructura. No obstante, los datos obtenidos de la bicicleta Fat serán usados para temas de cálculos de resistencia en las diferentes vigas. Figura 17. Viga de parqueo – vista frontal.
Fuente: Autores. Así mismo para tener una idea del ancho de la viga se tuvo en cuenta el espesor de la llanta más delgada y la más gruesa, donde se encontró que la menor corresponde a la cicla de carrera con 0,023 metros y la mayor a la Fat con 0,12 metros. Al observar la gran diferencia entre estos anchos, se llegó a la conclusión de realizar una viga con perfil en V para garantizar el equilibrio de las bicicletas, donde la parte más delgada es de 20 milímetros y la más ancha de 170 milímetros, así cualquier tipo de llanta de la más delgada a la más gruesa entraran hasta donde las paredes de la viga se lo permitan y esto brindará un apoyo y fricción entre las paredes y el neumático de la cicla lo cual las mantendrá en un punto de equilibrio. El alto de la viga fue definido tomando un porcentaje de la llanta más grande que para este caso es la de la bicicleta Fat, con este valor se asegura que la bicicleta no se incline y así mismo evita que esta se caiga de la estructura. Este porcentaje se obtuvo comparando diferentes tipos de parqueaderos en los que se observa

39
que se toma una pequeña parte de la llanta de la bicicleta sin afectar los piñones o ejes que esta lleva. Figura 18. Viga de parqueo – vista lateral derecha.
Fuente: Autores. Por último, para el bosquejo de esta viga se tuvo en cuenta que durante el funcionamiento del estacionamiento, podrían presentarse vibraciones fuertes que harían que las bicicletas se rodaran de su bahía lo que provocaría una caída de estas en la estructura, para solucionar este detalle se realizó una modificación en la viga anexándole una depresión con un diámetro igual al de la rueda de la bicicleta más grande, es decir de 0,75 metros; la cual asegurará que la llanta delantera de la cicla se ancle en esta, de esta manera impedirá que la bici se ruede de su lugar. Así mismo para que esta depresión no afecte la extracción de la bicicleta al momento de retirarla de su bahía, se formó un empalme en las esquinas del suelo de esta, para reducir los esfuerzos tanto en la viga como en la pinza encargada de retirar la cicla. En adición a esta propuesta de bahía se anexan las validaciones realizadas con el programa Autodesk Inventor donde se puede corroborar que la viga planteada es favorable para estacionar una bicicleta sobre ella.
2.2 SELECCIÓN DE MECANISMOS.
2.2.1 Opciones para el sistema de elevación.

40
Observando el principio de funcionamiento en la elevación del sistema propuesto en la fase 1 del parqueadero de bicicletas, el cual consiste en un sistema de piñón-cremallera desplazado sobre un riel situado verticalmente, se tomó la decisión de revisar diferentes opciones para poder escoger la más adecuada. A continuación, se mostrarán las diferentes ideas pensadas de acuerdo con las necesidades del parqueadero. teniendo en cuenta las dimensiones de los diferentes tipos de bicicletas. Figura 19. Plataforma de elevación.
Fuente: Proyecto de grado “simulación en un entorno virtual de un estacionamiento de bicicletas en la universidad piloto de Colombia”. En la figura 19 se muestra la propuesta presentada en la primera fase del proyecto la cual consiste en un sistema de piñón-cremallera que se desplaza sobre un riel dentado transportando la cicla al piso 2 y 3 del estacionamiento. Este sistema se controla mediante la información de sensores los cuales le indican al controlador que acción realizar. Figura 20. Tornillo sin Fin.
41
Fuente: Autores. Como se puede observar en la Figura 20 la segunda idea para el sistema de elevación es un tornillo sin fin situado de manera vertical, el cual está fijo a un disco ubicado en la parte superior del parqueadero, mientras le permite rotar con un rodamiento acoplado. Este movimiento se logra gracias al accionamiento de un motor que provocará que otro disco colocado en la parte inferior del tornillo se desplace enroscándose en este, esto solamente se lograría sosteniendo el disco inferior para evitar que gire en conjunto con el tornillo. Por esta razón se añadieron dos ejes paralelos al tornillo los cuales atravesaran el disco inferior logrando así sostenerlo dándole la libertad también de poder desplazarse verticalmente. Figura 21. Actuadores neumáticos sin vástago.
Fuente: Autores.

42
La figura 21 presenta dos actuadores neumáticos sin vástago enfrentados, los cuales están acoplados con una viga en forma de cruz que se sujeta en sus extremos de la masa móvil (carros) de cada actuador, debido a que estos carros son los que se desplazan por el actuador con el accionamiento del aire comprimido, haciendo que eleven y bajen la viga en cruz en conjunto con el sistema que ira situado encima de esta. Este mecanismo será accionado a través de sensores que enviaran la información a un controlador con el fin de ubicar la plataforma en el lugar correcto para posicionar la bicicleta en alguno de los 3 pisos. Tabla 2. Ponderación de parámetros.
PONDERACION DE PARAMETROS
Etapa
Requerimiento Sistema
Dis
eño
Pre
cis
ión
Velo
cid
ad
Costo
de c
om
pra
Mante
nim
iento
Espacio
Consum
o d
e e
nerg
ía
Energ
ía lim
pia
Facili
da
d d
e c
ontr
ol
Total
Elevación
Piñón - Cremallera 3 5 4 2 3 4 2 3 4 3,3
Tornillo sin fin 3 3 2 1 3 3 2 3 4 2,7
Actuador neumático con vástago 4 5 5 3 4 2 3 4 5 3,9
Actuador neumático sin vástago 4 5 5 2 4 5 3 4 5 4,1
Desplazamiento horizontal
Riel (Banda transportadora) 4 4 5 3 3 4 2 3 4 3,6
Caja sobre horquilla 4 5 3 4 4 1 3 4 5 3,7
Actuador neumático con vástago 4 5 5 3 4 2 3 4 5 3,9
Actuador neumático sin vástago 4 5 5 2 4 5 3 4 5 4,1
Rotación Polea - motor 4 3 5 4 3 2 3 3 4 3,4
Engrane - motor 3 5 5 3 2 4 3 3 4 3,6
Fuente: Autores. De acuerdo con los requerimientos del parqueadero como: el peso de los vehículos a movilizar, las dimensiones, los costos, el impacto al medio ambiente, la velocidad de trabajo y un mantenimiento moderado, se determinó que:
- El sistema de la figura 19 propuesto en la fase uno del estacionamiento no es el más adecuado debido a que, al ser un sistema electromecánico implica un incremento en el consumo de energía, mayor mantenimiento y más complejidad en su diseño.
43
- El mecanismo con tornillo sin fin presenta la principal falencia es el tema de costos de fabricación, debido a que el diseño del diente resulta demasiado complejo, además de esto no es común la fabricación de este aquí en Colombia, lo cual genera un incremento en el costo. Así mismo al ser también un dispositivo mecánico presenta los mismos inconvenientes que el anterior.
- Por otro lado, el cilindro neumático presenta varios beneficios como lo es su
velocidad, el manejo de energías limpias como el aire, no requiere de una revisión tan periódica para su mantenimiento ya que es un sistema semi autosuficiente, brinda más precisión lo que favorece al momento de posicionar y se controla de una manera más sencilla. No obstante, se observa que tanto el pistón hidráulico como el neumático presentan un inconveniente grande con su vástago, ya que al tenerlo requieren del doble de espacio para poder expandirse lo cual alteraría las dimensiones del parqueadero y tendría mucho espacio perdido. Por otro lado, el cilindro neumático es diseñado en base al peso de la bicicleta lo que resultaría en un vástago de diámetro muy delgado que al ser tan largo presentaría un pandeo que lo podría llevar a la ruptura.
Por esta razón y así mismo observando los resultados detallados en la tabla 2 es por lo que se llega a la conclusión de usar la última propuesta mencionada en la figura 21 ya que es un sistema que reúne los beneficios de la energía neumática y a diferencia del actuador con vástago, este no presentaría dichos inconvenientes ya que no cuenta con un vástago sino con una masa móvil que se desplazara por el cilindro bajo el mismo accionamiento, por lo cual ocupara el mismo espacio destinado para el parqueadero.
¿Por qué implementar un sistema neumático en el mecanismo de elevación y posicionamiento del parqueadero? Como bien se sabe el aire es una materia prima con varias propiedades físicas las cuales traen consigo ciertas ventajas que hacen de este una solución beneficiosa, fácil y con un amplio futuro a nivel industrial; estas ventajas son:
Es una sustancia limpia que no produce ningún tipo de suciedad.
Está presente en cualquier parte del mundo lo que facilita su obtención y así mismo su bajo costo.
Su volumen varía frente a los cambios de temperatura, pero esto no afecta el trabajo de la maquinaria siempre y cuando se encuentre comprimido.

44
El aire comprimido no es inflamable y tampoco es causante de ningún tipo de chispa, por lo tanto, no hay riesgo de incendio y así mismo brinda economía, al no requerir de instalaciones contraincendios.
Es un tipo de energía rápida ya que con ayuda de la presión ejercida puede viajar a grandes velocidades dentro de las tuberías.
Así mismo esta clase de automatización trae algunas desventajas que son:
Al querer implementar demasiada fuerza con este método se requiere de un mayor gasto económico.
El aire usado en este sistema tiene que ser tratado para quitarle la humedad ya que así puede provocar daños en las tuberías.
Es una técnica ruidosa en especial al momento en el que el aire es liberado.
Un mal manejo de las presiones en los tanques de almacenamiento podría provocar explosiones. [30]
Comparando estos criterios se puede determinar que la neumática es una mejor alternativa frente a otras clases de automatización, ya que presenta una gran cantidad beneficiosa para los procesos de producción, es por eso por lo que es un sistema que en tan poco tiempo ha reemplazado a otros en el sector industrial.
2.2.2 Alternativas para el sistema de posicionamiento. Teniendo en cuenta la selección establecida para el sistema de elevación, se realiza también una lluvia de ideas de donde se obtienen diferentes propuestas para que el dispositivo pueda llevar a cabo la acción de ubicar correctamente la bicicleta entrante en la bahía disponible. Esta estructura del parqueadero se divide en varias secciones que son: la rotación del mecanismo, el agarre de la cicla y el desplazamiento horizontal de esta. A continuación, se presentan las ideas más relevantes para llevar a cabo el proceso mencionado:

45
Figura 22. Contenedor de bicicleta.
Fuente: Autores. Figura 23. Poleas de transmisión.
Fuente:https://www.aulafacil.com/uploads/cursos/710/editor/dinamica-2-fisica-lecc-40_clip_image010.es.jpg
- Como primera opción se planeó hacer un mecanismo en el que el usuario
ingresa la bicicleta en un compartimiento como el de la figura 22, el cual serviría para poder poner los accesorios que el bici-usuario traiga consigo. Esta caja cuenta con una puerta que funciona como barrera para que la bicicleta se mantenga en su lugar, adicionalmente en la parte inferior dispone de una muesca que permite el paso por el dispositivo de ingreso diseñado en la fase 1 del parqueadero.
Como se acaba de indicar el contenedor será sujetado por una horquilla (similar al de un montacargas) que estaría acoplada a un actuador neumático con vástago que cumple la función de empujar y halar la caja hasta la posición ideal para su estacionamiento. Este vástago a su vez va conectado al mecanismo de elevación. Para finalizar la rotación se llevará a cabo mediante la transmisión de un sistema de poleas accionada por un motor (Figura 23) que hará girar todo el mecanismo, hasta el punto indicado por el sensor que indicará las bahías disponibles.
- Como segunda opción se planteó el sistema mostrado en la figura 24, el
cual comienza desde el momento en el que ingresa la bicicleta al parqueadero y es tomada por la pinza neumática que cuenta con un par de dedos diseñados de tal manera que le den un buen soporte a la cicla y así mismo que no causen daños sobre esta.

46
Figura 24. Sistema de posicionamiento neumático.
Fuente: Autores. A continuación, la pinza se cerrará y será desplazada por una masa móvil que hace parte de un actuador neumático sin vástago, llevando de esta manera la bicicleta, ya sea al fondo de la viga transportadora como también a la viga de parqueo. Además, para asegurar que la cicla sin importar su tamaño logre llegar a su posición final en la bahía, se anexo al mecanismo de desplazamiento un actuador con vástago, que empujara el vehículo lo necesario para que se cumpla este objetivo. Para generar el desplazamiento vertical de la viga transportadora se decidió implementar el mismo mecanismo de desplazamiento horizontal (actuador sin vástago), sin embargo, para brindar seguridad frente a fallas estructurales se implementan dos actuadores ubicados paralelamente los cuales estarán conectados con una viga de refuerzo en forma de cruz, quien también cumplirá la función de reforzar la viga transportadora para poder soportar los esfuerzos máximos presentados en esta. Estos actuadores verticales contaran con tres sensores magnéticos que le indicaran a la estructura en que piso se encuentran.
Por último, en este caso se usará un sistema de rotación el cual consiste en un motorreductor que cuenta con un sistema de freno eléctrico y un driver para poder controlar la posición final del motor, determinando los ángulos que corresponderán a cada bahía de parqueo, generando el movimiento adecuado a la plataforma para hacer rotar el mecanismo completo y al igual que el caso anterior esta acción será controlada a través de sensores. Dicha plataforma tendrá forma de cruz de tal manera que pueda sostener todo el mecanismo frente a cualquier eventualidad, esta contará con una rodachina en cada una de sus puntas facilitando así la rotación del sistema.

47
Figura 25. Plataforma giratoria. Autodesk Inventor.
Fuente: Autores. De este modo se tomó la decisión de usar el segundo método mencionado el cual es mostrado en las figuras 24 y 25 ya que es un sistema de posicionamiento que cumple con todos los requerimientos de funcionamiento mostrados en la tabla 2 y así mismo está pensado para cualquier modelo de bicicleta. También influyó en la decisión, algunas dificultades presentadas en el primer sistema como lo es el contenedor debido a sus dimensiones por lo tanto reducirán el espacio en el parqueadero causando una disminución de bahías y también al tener piezas de mayor peso incrementarían los esfuerzos en el estacionamiento. Otro factor en contra es el uso de un cilindro neumático con vástago como sistema de desplazamiento horizontal, ya que al sumar el peso de la caja más la bicicleta y los objetos dejados por el usuario darían como resultado una fuerza mayor que provocaría un pandeo en el vástago del cilindro o en el peor de los casos podría fracturarlo. Así mismo para poder girar el mecanismo completo, se requiere de un motor de baja potencia con el fin de evitar altos consumos de energía, es por esto por lo que se decide usar una transmisión por engranaje que ayuda a obtener la potencia adecuada para el correcto funcionamiento del giro en todo el dispositivo.
2.3 DISEÑO DE LOS SISTEMAS DE ELEVACION Y POSICIONAMIENTO.
2.3.1 Elección de pinza neumática. Con respecto al funcionamiento del sistema de posicionamiento mostrado en la figura 24 se procede a elegir la pinza encargada de sostener la bicicleta cuando es

48
desplazada por el mecanismo. Para ello se debe tener en cuenta aspectos como las dimensiones, el peso de la cicla y la presión neumática de trabajo, que será de 6 bares debido a que es lo comúnmente usado en el ámbito industrial. Teniendo en cuenta esto, se observa en la tabla 1 que los casos que más influyen en el diseño son la bicicleta Fat, por tener el grosor de llanta más elevado y la bicicleta de carrera por contar con el espesor de rueda más delgado. De aquí depende una característica importante de la pinza que es su carrera de cierre y de apertura. Figura 26. Espesor de las llantas.
Fuente: Autores. De la figura 26 se puede deducir la diferencia entre los espesores de las llantas que da como resultado 0,097 m es decir que la carrera mínima de la pinza tiene que ser de esta misma distancia y así mismo tiene que tener una apertura mayor a los 0,12 m y un cierre mínimo de 0,023 m. De igual modo, para brindar más seguridad en la sujeción y también para evitar daños en las llantas, se requiere de mayor área de agarre en la llanta, es por esto que se llega a la conclusión de usar una pinza paralela la cual por su diseño contribuye con estas condiciones. Por otro lado, también se debe tener en cuenta el peso máximo de la bicicleta y la fricción que esta hace en el piso que debe soportar la pinza, que para este caso se usa el de la cicla Fat siendo la más pesada con 55 kilogramos.

49
De este modo se indago por diferentes modelos de pinzas comerciales, donde se encontró que la más apropiada es la serie PSG de la marca Omil. Figura 27. Finger parallel grippers, pneumatic - series PSG.
Fuente: http://www.omil.it/immagini_prodotti/pdf/74.pdf Tabla 3 Datos técnicos de la pinza PSG.
Fuente: http://www.omil.it/immagini_prodotti/pdf/74.pdf Como se puede apreciar en la tabla 2 el peso máximo que soporta esta pinza es de 50 kg el cual es inferior al peso de la bicicleta Fat, pero teniendo en cuenta que la pinza solo está diseñada para sostener la bicicleta que reposa sobre la viga mas no para levantarla, se determina que la deficiencia en este aspecto no es relevante y por ello se decide usar este modelo de pinza. De igual manera la carrera (Stroke) de la pinza es de 0,10 m lo cual cumple con lo requerido, así mismo su apertura máxima también es la adecuada, sin embargo, el cierre mínimo no acata el requisito y es por esto que es necesario diseñar unos dedos apropiados para ayudar a cumplir esta condición (numeral 2.3.2).
2.3.1.1 Rodachinas. Pensando en el desplazamiento de la pinza se observó que debido a su peso y al tipo de material que la constituye a esta como el de la plataforma por la cual se va a desplazar; generaría demasiada fricción para su

50
desplazamiento causando así mayores esfuerzos y también diseños sobre dimensionados. Es por esto por lo que se tomó la decisión de acoplarle en la parte inferior un par de rodachinas, los cuales reducirán ampliamente la fricción y facilitarán el movimiento de la pinza sin la necesidad de introducirle una fuerza demasiado grande. Figura 28. Rodachina – S12 y 13.
Fuente: https://imsa.co/portafolio/rodachinas-s12-y-13/ La rodachina escogida se muestra en la figura 28, la cual cumple con las condiciones óptimas para el desplazamiento correcto de la pinza; características tales como una altura de 0,035 metros, lo que es adecuado para que los dedos de la pinza no estén tan elevados y así mismo no generen daños en los ejes de las llantas. Por otro lado, esta llanta está constituida por polipropileno y su soporte este hecho de acero galvanizado, es por esto que brinda una capacidad de carga de 32 Kg, de manera que, junto con su compañera, son totalmente capaces de soportar los 36 Kg que pesa la pinza neumática más los 7,405 Kg correspondientes a los dedos. Las llantas se ubican en el centro de la cara inferior de la pinza, separadas 0,085 m la una de la otra, distancia que encaja con cada una de las guías que tiene la viga transportadora.
2.3.2 Diseño de los dedos para la pinza. Pensando en asegurar un buen agarre de las bicicletas, en donde se garantice la seguridad y el cuidado que estas, se llegó a la conclusión de que el mejor material para diseñar los dedos de la pinza es el caucho. Ya que es un material liviano, con muy buen agarre gracias a la fricción que presenta entre caucho y caucho,

51
también se deja moldear fácilmente y así mismo, por su textura puede aprisionar las llantas de las diferentes bicicletas que entren al parqueadero sin causar daño alguno en ellas. Figura 29. Dedo de pinza comparado con diámetros de llantas.
Fuente: Autores. Para el diseño de este, se inició tomando una pieza de un caucho duro, el cual fue pesado y dimensionado para poder calcular la densidad de este material, la cual resulto ser de 1.232 Kg/m3. Este valor fue ingresado en las especificaciones de un caucho seleccionado en el programa Inventor, donde al asignarle un entorno de análisis de tensión, arrojo un peso con valor de 7,405 Kg. La geometría de este dedo se realizó en base al análisis de varias características que garantizarían un correcto agarre y seguridad de la llanta de la bicicleta. Inicialmente se dedujo que entre mayor área de la llanta fuese agarrada, brindaría más estabilidad a la bicicleta evitando que esta se ladee, también, pensando en los diferentes tamaños de llanta y así mismo en evitar que el dedo haga contacto con el eje para no provocarle daños, se diseñó un dedo en forma de “L”; de esta manera cumpliría con estos factores mencionados.

52
Figura 30. CAD de ensamble entre pinza y dedos.
Fuente: http://www.omil.it/linea_prodotti.php?s=1, Autores. Por otro lado, las dimensiones que constituyen a este dedo proporcionales al tamaño entre pinza y llanta, es decir, la altura mayor del dedo que empata con la pinza se dejó de esta misma medida (0,19 m) y la altura menor se asignó de 0,08 m con la idea de que en la mayoría de los casos solo tenga contacto con el caucho de las llantas. El largo de estos dedos fue ideado para que asegure un buen agarre del radio de la llanta más grande con una longitud de 0,375 m; finalmente el ancho de estos se diseñó con el propósito de garantizar los 0,02 m de cierre en la pinza y 0,12 m en la apertura de esta, lo que dio como resultado un espesor de 0,164 m que así mismo asegura que el dedo no se deforme y mantenga la presión en el cierre.
2.3.3 Elección del cilindro neumático con vástago. Observando en el numeral 2.1.2 la viga propuesta que cumple con la función de bahía de parqueo está diseñada según la bicicleta de mayor longitud y así mismo después de diseñar el sistema de agarre, se pudo detallar una dificultad que tendría la bicicleta de niños para poder reposar su llanta en el deprimido, ya que al ser tan corta no alcanza a llegar hasta su posición de parqueo con tan solo el sistema de agarre y desplazamiento. Es por esto por lo que se pensó en añadir un cilindro neumático con vástago que se encuentra situado sobre la masa móvil del cilindro sin vástago y que de igual manera estará atornillado a la pinza para poder desplazarla de la viga transportadora a la bahía de parqueo; de este modo empujará la bicicleta hasta que la llanta de esta caiga en el deprimido.

53
Figura 31. Medidas de los componentes de agarre.
Fuente: Autores. En la figura 31 se muestra de manera gráfica la bicicleta de niños parqueada en la bahía, donde el círculo de 0,4 m que está ubicado en el deprimido representa la llanta delantera, mientras que el otro círculo de igual medida simboliza la llanta trasera. Para determinar la carrera del cilindro se calculó la medida del espacio comprendido entre el centro de la llanta trasera y el límite de la viga que resulto ser de 0,749 m; sin embargo, una parte de esta área la ocupa la pinza que tiene una longitud de 0,192 m y también el dedo con 0,336 m, los cuales disminuiría la distancia ya mencionada. Por otro lado, se tiene un intervalo amplio de 0,281 m entre la bahía y la viga de parqueo el cual garantiza que no ocurran choques en el sistema y que así mismo añade valor al espacio. Teniendo en cuenta esto, se determina el valor final de la carrera del cilindro con vástago así:
El paso por seguir es hallar el diámetro del embolo del actuador sin vástago, el cual garantizará que este tenga la fuerza suficiente para posicionar la bicicleta. Inicialmente se debe tener en cuenta el peso de los elementos a desplazar que son: Tabla 4. Masas de los elementos a desplazar.
ELEMENTO Masa (Kg)
Bicicleta Fat 55
Pinza 36
Dedos 7,405
Rodachina 0,05
TOTAL 98,455

54
Fuente: Autores. Donde 98,455 Kg es la masa máxima (m) a transportar. Seguido de esto, asumiendo que la bahía de parqueo está hecha de acero, se asigna un coeficiente de fricción entre este material y el caucho de la llanta que resulta ser de 0,64 [31], También se tuvo en cuenta un factor de servicio el cual depende de las características del dispositivo, que para este caso su fuente de potencia es neumática y se considera de mediano impacto ya que debe desplazar cerca de 100 Kg con un fricción muy alta. Por lo cual, al observar la tabla 4 se puede apreciar que el valor más adecuado para el sistema es de 1,25. Tabla 5. Factor de servicio FD.
Fuente: https://www.monografias.com/trabajos81/diseno-de-frenos-contraccion-externa/diseno-de-frenos-contraccion-externa.shtml Se sabe que la fuerza del cilindro con vástago (Fcv) debe ser de:
Ec. [ 1]
Entonces la fuerza corregida con los factores mencionados es:

55
Conociendo que la presión de trabajo es de 6 bares se determina el área del embolo:
Ec. [ 2]
Entonces el diámetro (Ø) del embolo es:
√
Ec. [ 3]
√
El diámetro teórico obtenido es de 41 mm, pero al revisar los valores comerciales en la empresa Festo, se encontró que manejan diámetros de 40 y 50mm. Por seguridad se decide escoger el valor mayor al teórico que sería el de 50mm, para este caso el cilindro neumático escogido es el de referencia DSBC-50-PPVA-N3 debido a que cumple con las condiciones de diseño; en el Anexo 3 se puede observar la ficha técnica de este dispositivo. Para futuros cálculos es necesario determinar la masa total del cilindro neumático, para ello se debe tener en cuenta la ficha técnica de este (Anexo 3), donde se observan 4 diferentes valores, dos de ellos son fijos:
- Masa móvil con carrera de 0m = 0,365 Kg - Peso con carrera 0m = 1,19 Kg
Y los restantes son variables dependiendo de la longitud de la carrera:
- Masa móvil adicional con carrera de 0,01m = 0,056 Kg - Peso adicional con carrera 0,01m = 0,025 Kg
Para determinar la masa total realizamos una regla de tres con los valores variables, multiplicándolo con la carrera obtenida que es de 0,503m y dividiéndolo en 0,01m donde resultan los siguientes valores:
- Masa móvil adicional con carrera de 0,503m = 2,815 Kg - Peso adicional con carrera 0,503m = 1,257 Kg

56
Finalmente se suman los valores obtenidos con los valores fijos, dando como resultado una masa total de 5,626 Kg. Figura 32. Cilindro neumático con vástago.
Fuente: https://www.festo.com/cat/es-co_co/products_DSBC
2.3.4 Designación de los actuadores neumáticos sin vástago.
2.3.4.1 Actuador como viga transportadora. Como se mencionó anteriormente, para el sistema de desplazamiento horizontal se escogió un actuador neumático sin vástago debido a que presenta varios beneficios tales como: menor peso en el sistema, menor espacio requerido, control de velocidad, facilidad de instalación y la fuerza y dimensiones apropiadas para mover el sistema de agarre junto con la bicicleta que este en proceso. Para la selección adecuada de este dispositivo se realizó un proceso similar al del numeral 2.3.3, ya que, al igual que el cilindro con vástago, tienen el mismo principio de funcionamiento por medio de un embolo accionado con aire comprimido. Por lo tanto, se inicia teniendo en cuenta el valor resultante de la tabla 3 (98,455Kg) y se adiciona el peso del actuador con vástago ya calculado (5,626 Kg). Dando como peso total para este caso un valor de 104,081 Kg. A continuación, se calcula la fuerza requerida por el actuador sin vástago horizontal (FASVH) para mover la masa obtenida, Ec. [1]:
Entonces la fuerza corregida con el factor de seguridad es:

57
Conociendo que la presión de trabajo es de 6 bares se determina el área del embolo, Ec. [2]:
Entonces el diámetro (Ø) del embolo es, Ec. [3]:
√
Comercialmente se encuentran actuadores de 50 y 60 mm de diámetro en el embolo, dicho esto se escoge el de 60 mm para mayor seguridad. Por otro lado, para determinar la carrera ideal del actuador, se tienen en cuenta las medidas de los artefactos que reposarán sobre este y que a la vez serán desplazados por él, así: bicicleta más larga (Fat) de 2,2 m a la cual se le resta el radio de una de sus llantas con el fin de economizar material, largo de pinza neumática de 0,192m y finalmente se deja un espacio de seguridad de 0,005 m que puede servir para el sobrante del tornillo del cilindro con vástago que no quepa en la ranura de la pinza. Entonces:
( )
Es decir que la carrera necesaria del actuador tiene que ser de 2,022 m para poder desplazar todos los artefactos por completo. De esta manera se toma la decisión de escoger el actuador neumático sin vástago con referencia DGC-K-63-2022-PPV-A-GK de la empresa Festo el cual esta detallado en el anexo 4. Adicionalmente para garantizar un acople correcto entre el cilindro con vástago y la pinza neumática, se diseñó un soporte con el mismo material y dimensiones que la masa móvil del actuador sin vástago, el cual será posicionado sobre dicha masa móvil, brindándole una mayor altura al cilindro con vástago.
2.3.4.2 Actuador como elevador. Para este caso se utilizará el mismo tipo de actuador usado en el anterior numeral, pero este cumplirá la función de actuar como elevador de sistema, por ello requiere de una mayor carrera y así mismo de un embolo adecuado para poder elevar todo el sistema.

58
En primer lugar, se toma el ultimo peso total obtenido que es de 104,081Kg y se le agrega el peso de del actuador sin vástago horizontal (38,103Kg) y el de la viga de refuerzo (52,735 Kg, mencionado en el capítulo 2.3.5) dando como peso total un valor de 194,92 Kg. Con este dato se calcula la fuerza requerida por el actuador sin vástago vertical (FASVV) para elevar el sistema, Ec. [1]:
Entonces la fuerza corregida con el factor de seguridad es:
Como se muestra en la figura 21, el mecanismo de elevación cuenta con dos actuadores neumáticos enfrentados encargados de subir y bajar el sistema, es por esto por lo que la fuerza necesaria obtenida se divide en dos con el fin de repartirla en los dos actuadores. Dando como resultado un FASVV = 1195,104 N para cada actuador. Continuando con él cálculo se determina el área del embolo, Ec. [2]:
Entonces el diámetro (Ø) del embolo es, Ec. [3]:
√
Se escogen dos cilindros comerciales de 50 mm de diámetro en el embolo para levantar los 2390,208 N. Ahora se prosigue a determinar la carrera de estos cilindros y como se había planeado en la primera fase del parqueadero, este contara con tres pisos de parqueo, los cuales tendrán una altura que depende de la altura de la bicicleta más alta (Fat) que es de 1,3 m, a este valor se le adiciona los 0,3 m de alto que tiene la bahía de parqueo y además se le adiciona 0,08 m de espacio por seguridad. Entonces:
( ) ( ) ( )

59
Finalmente teniendo en cuenta la carrera establecida y el diámetro del embolo calculado se escogieron dos actuadores neumáticos sin vástago de referencia DGC-K-50-5050-PPV-A-GK de la empresa Festo los cuales se detallan en el anexo 5. Figura 33. Ejemplo de producto.
Fuente: https://www.festo.com/cat/es-co_co/data/doc_es/PDF/ES/DGC-K_ES.PDF En resumen, ya habiendo establecido las dimensiones de los actuadores neumáticos tanto los verticales como el horizontal y también teniendo en cuenta la longitud de la bahía de parqueo y conociendo la organización del parqueadero, se puede establecer las dimensiones finales de este, mostradas en la figura 34. Figura 34 Dimensiones del parqueadero.
Fuente: Proyecto de grado “simulación en un entorno virtual de un estacionamiento de bicicletas en la universidad piloto de Colombia”; Autores.

60
Estas dimensiones obtenidas, tienen en cuenta tanto el sistema interno, que está conformado por los actuadores y bahías; como la parte externa, que incluye las paredes y techo del estacionamiento.
2.3.5 Viga de refuerzo. Para garantizar que el espacio entre los actuadores verticales sea lo suficientemente amplio para que pase por la viga transportadora la bicicleta Fat y así mismo para brindar un mayor apoyo a esta viga se diseñó un soporte en cruz el cual ayuda a solucionar estas necesidades. Figura 35. Vigas acopladas al soporte en cruz.
Fuente: Autores. Como se puede observar en la figura 35, los actuadores verticales están ligados al soporte en cruz mediante un conjunto de piezas sugeridos por la empresa Festo, denominados Arrastrador DARD-M y Placa adaptadora DAMF de los cuales se puede encontrar sus especificaciones en la documentación para actuadores lineales DGC-K [32]. Así mismo el actuador horizontal reposa sobre las cartelas del soporte y va acoplado con dos platinas ubicadas en sus laterales que cuentan con orificios roscados para ser sujetados con tornillos, de esta manera se mantendrá fijo el sistema sin el riesgo de que la viga se caiga de allí. Las dimensiones establecidas dependen del grosor de la viga de parqueo, así pues, las puntas de la cruz que la sostienen tienen este mismo ancho de 0,106 m; de este modo se decidió asignarles este mismo valor a las puntas restantes por temas de simetría. Por otro lado, la altura se quiso establecer con la misma longitud que tiene la masa móvil de los actuadores verticales que es de 0,206 m,

61
pero se llegó a la conclusión de que es demasiado para algo tan simple lo que terminaría en un desperdicio de material, así que se tomó la decisión de solo tomar la mitad de esta medida, dejando así la altura de las puntas de la cruz de 0,1 m. Por otro lado, la longitud de la sección que está conectada a las columnas (más adelante denominada viga indeterminada) tiene una longitud de 1,2 m la cual fue asignada así para garantizar el paso de la bicicleta más ancha por el medio de las dos columnas. Finalmente, por la misma razón de ahorrar material y también para disminuir esfuerzos en la viga en cruz, se realizó un desvanecido en las puntas que sostienen al actuador horizontal dándole así una forma de cartela como se ve en la figura 35; esta última sección tiene una medida de 1,177 m lo cual comprende la mitad de la longitud de la viga transportadora para poder ubicarla en el centro de esta.
2.4 ANÁLISIS Y CÁLCULOS.
2.4.1 Viga transportadora (actuador horizontal). El presente análisis es realizado con el fin de comprobar que los actuadores escogidos para el funcionamiento del parqueadero; para este caso el actuador encargado de desplazar la bicicleta horizontalmente sea capaz de soportar las variaciones de fuerzas desde la mínima hasta la máxima y los diferentes movimientos horizontales que se presentaran en él, garantizando así una vida infinita sin sufrir roturas ni deformaciones. Para dar inicio a este cálculo se debe saber que la longitud establecida para la viga es de 2,354 m, medida que se obtuvo al tomar la longitud de la carrera del actuador sin vástago horizontal y sumarle la sección que pertenece al mecanismo de la masa móvil; así mismo se debe tener en cuenta las masas correspondientes de cada componente. Figura 36. Mecanismo con bicicleta en posición inicial.

62
Fuente: Autores. Las fuerzas especificadas en la figura 36 se obtuvieron de una sumatoria de masas que conforma diferentes secciones sobre la viga de esta manera:
- P1: Fuerza en la llanta delantera: sumatoria de las masas presentadas desde el centro hasta el frente de la bicicleta.
- P2: Fuerza en la llanta trasera: sumatoria de masas presentada desde el centro hasta la parte trasera de la bicicleta.
- P3: Fuerza en el mecanismo de sujeción: conformado por la suma de las masas de la pinza neumática y el dedo.
- P4: Fuerza en sistema de desplazamiento (sumatoria de masa móvil del actuador sin vástago, cilindro con vástago y soporte).
Seguido de esto se determinó el centro de masa de cada conjunto de fuerzas y con ellos se estableció su punto de ubicación sobre la viga transportadora, este centroide fue determinado con la ayuda del programa Autodesk Inventor 2017. Dando inicio, se determinó la carga puntual del peso de la viga (P5):
Ec. [ 4]
Dónde: W1: Carga distribuida de la viga (158,79 N/m). L1: Longitud de viga transportadora. Entonces:
∑ ( ) Ec. [ 5]
∑ ( )
Dónde: W2: Superficie de la viga de refuerzo como apoyo. L2: Longitud de viga acartelada. 1 corte
∑ ( )
( )
( )
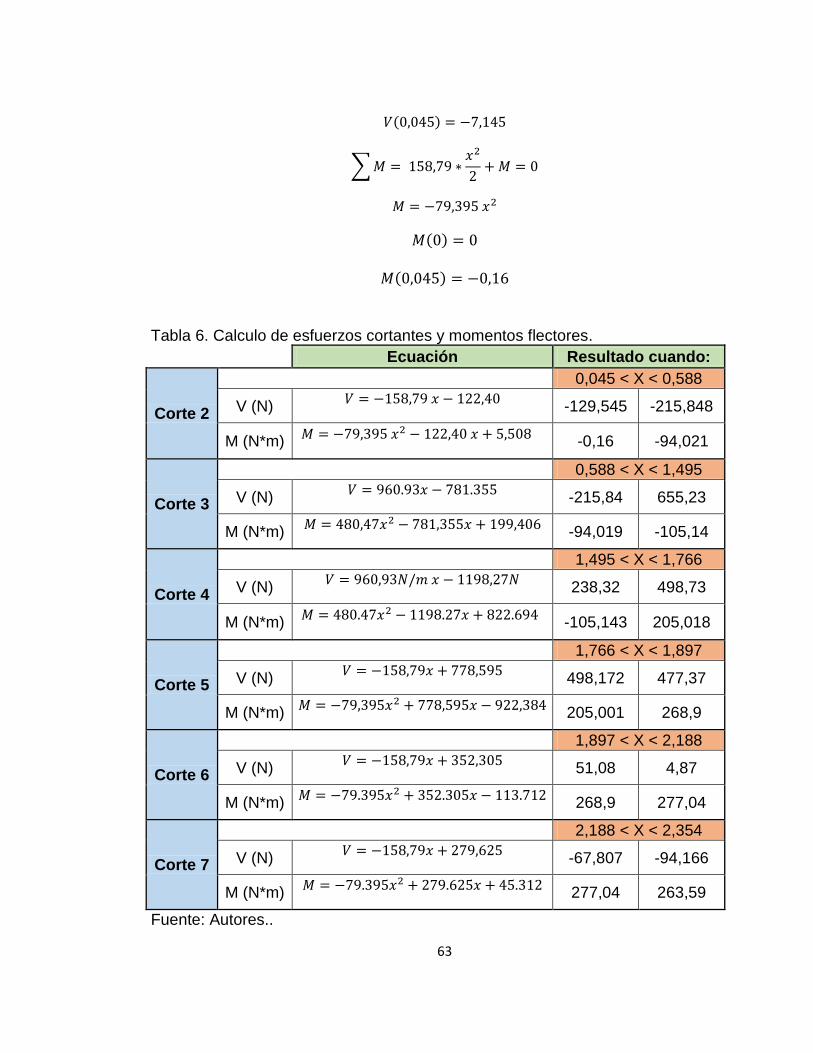
63
( )
∑
( )
( ) Tabla 6. Calculo de esfuerzos cortantes y momentos flectores.
Ecuación Resultado cuando:
Corte 2
0,045 < X < 0,588
V (N)
-129,545 -215,848
M (N*m)
-0,16 -94,021
Corte 3
0,588 < X < 1,495
V (N)
-215,84 655,23
M (N*m)
-94,019 -105,14
Corte 4
1,495 < X < 1,766
V (N)
238,32 498,73
M (N*m)
-105,143 205,018
Corte 5
1,766 < X < 1,897
V (N)
498,172 477,37
M (N*m)
205,001 268,9
Corte 6
1,897 < X < 2,188
V (N)
51,08 4,87
M (N*m)
268,9 277,04
Corte 7
2,188 < X < 2,354
V (N)
-67,807 -94,166
M (N*m)
277,04 263,59
Fuente: Autores..

64
Teniendo en cuenta los resultados calculados se obtienen los gráficos de esfuerzo cortante y momento flector mostrados en la figura 37. Figura 37. Diagramas de esfuerzo cortante y momento flector viga transportadora.
Fuente: Autores. Teniendo en cuenta que la viga está sometida a cambios en sus cargas y así mismo estas se desplazan sobre su superficie, se considera realizar un cálculo de fatiga para poder determinar su vida útil frente a estas condiciones, para ello es necesario determinar los momentos mínimo y máximo presentados en la viga. Los cuales son obtenidos observando la viga con diferentes posiciones de sus cargas; para este caso se revisó cuando la bicicleta está en su posición inicial (calculo mostrado anteriormente), cuando esta sin la bicicleta y cuando solo queda una llanta de la bicicleta en el momento de salida. A continuación, se resume el proceso estático en las tablas 6 y 7 para determinar los momentos máximos de los casos restantes:
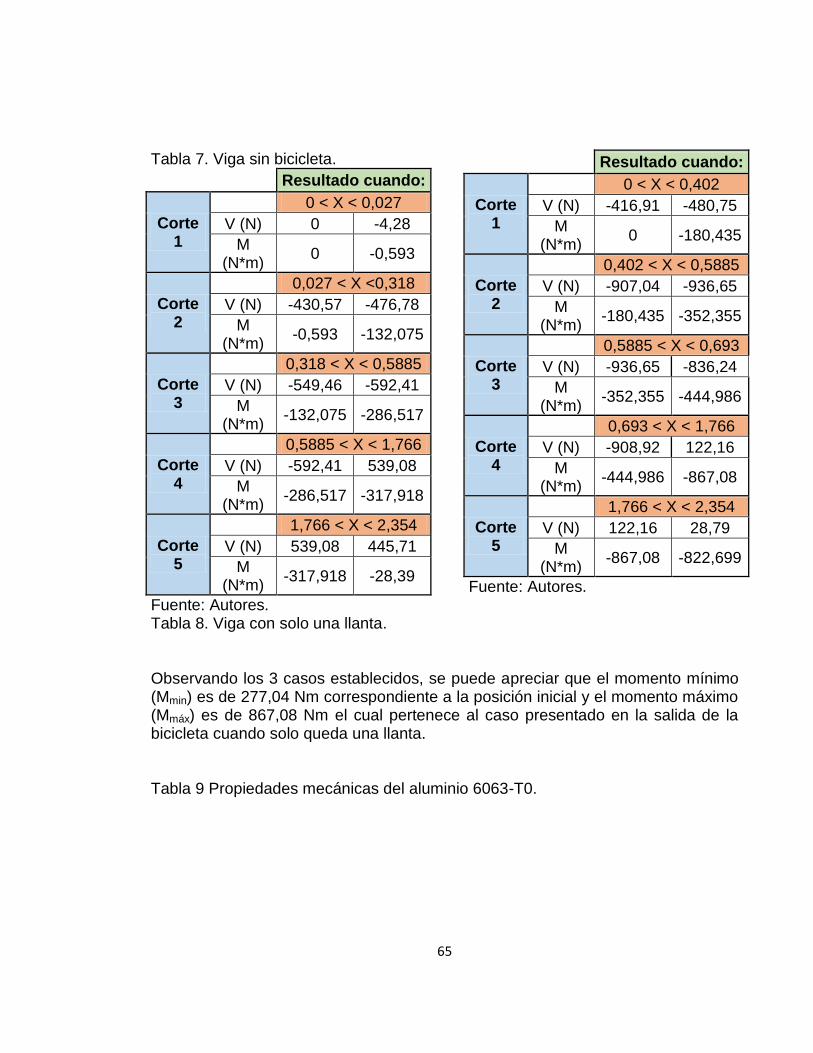
65
Tabla 7. Viga sin bicicleta.
Resultado cuando:
Corte 1
0 < X < 0,027
V (N) 0 -4,28
M (N*m)
0 -0,593
Corte 2
0,027 < X <0,318
V (N) -430,57 -476,78
M (N*m)
-0,593 -132,075
Corte 3
0,318 < X < 0,5885
V (N) -549,46 -592,41
M (N*m)
-132,075 -286,517
Corte 4
0,5885 < X < 1,766
V (N) -592,41 539,08
M (N*m)
-286,517 -317,918
Corte 5
1,766 < X < 2,354
V (N) 539,08 445,71
M (N*m)
-317,918 -28,39
Fuente: Autores. Tabla 8. Viga con solo una llanta.
Resultado cuando:
Corte 1
0 < X < 0,402
V (N) -416,91 -480,75
M (N*m)
0 -180,435
Corte 2
0,402 < X < 0,5885
V (N) -907,04 -936,65
M (N*m)
-180,435 -352,355
Corte 3
0,5885 < X < 0,693
V (N) -936,65 -836,24
M (N*m)
-352,355 -444,986
Corte 4
0,693 < X < 1,766
V (N) -908,92 122,16
M (N*m)
-444,986 -867,08
Corte 5
1,766 < X < 2,354
V (N) 122,16 28,79
M (N*m)
-867,08 -822,699
Fuente: Autores.
Observando los 3 casos establecidos, se puede apreciar que el momento mínimo (Mmin) es de 277,04 Nm correspondiente a la posición inicial y el momento máximo (Mmáx) es de 867,08 Nm el cual pertenece al caso presentado en la salida de la bicicleta cuando solo queda una llanta. Tabla 9 Propiedades mecánicas del aluminio 6063-T0.
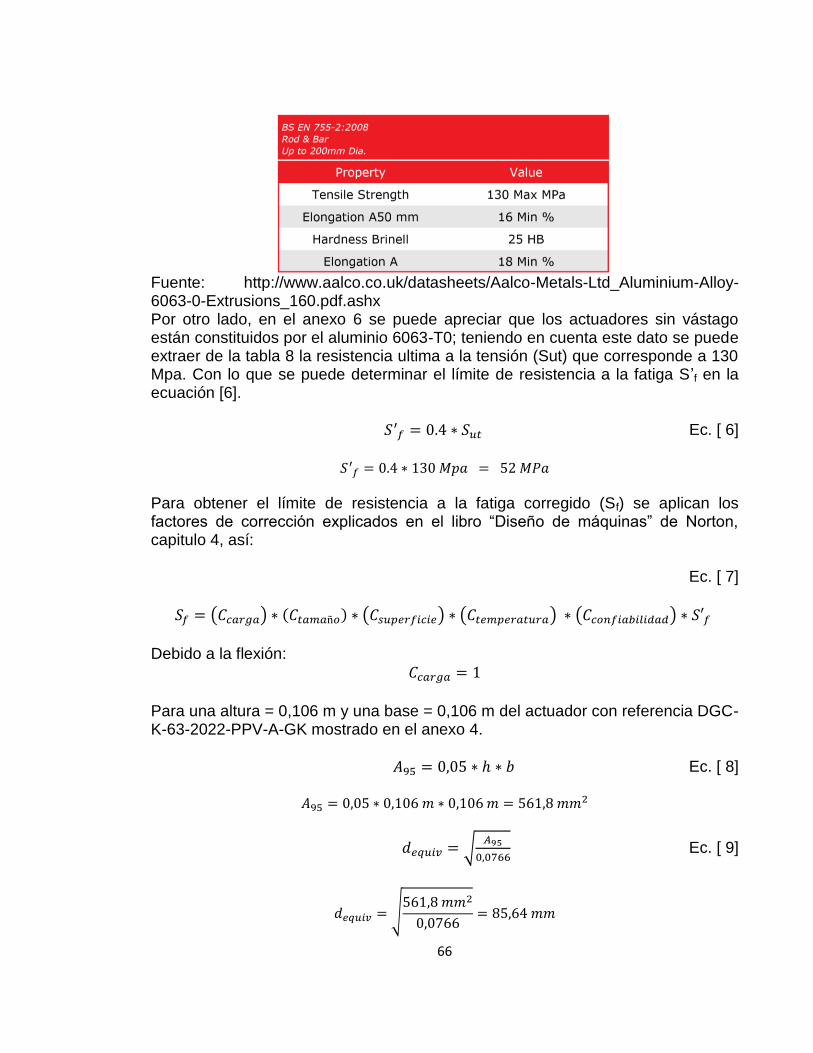
66
Fuente: http://www.aalco.co.uk/datasheets/Aalco-Metals-Ltd_Aluminium-Alloy-6063-0-Extrusions_160.pdf.ashx Por otro lado, en el anexo 6 se puede apreciar que los actuadores sin vástago están constituidos por el aluminio 6063-T0; teniendo en cuenta este dato se puede extraer de la tabla 8 la resistencia ultima a la tensión (Sut) que corresponde a 130 Mpa. Con lo que se puede determinar el límite de resistencia a la fatiga S’f en la ecuación [6].
Ec. [ 6]
Para obtener el límite de resistencia a la fatiga corregido (Sf) se aplican los factores de corrección explicados en el libro “Diseño de máquinas” de Norton, capitulo 4, así:
Ec. [ 7]
( ) ( ) ( ) ( ) ( )
Debido a la flexión:
Para una altura = 0,106 m y una base = 0,106 m del actuador con referencia DGC-K-63-2022-PPV-A-GK mostrado en el anexo 4.
Ec. [ 8]
√
Ec. [ 9]
√

67
para 8 mm <d ≤ 250 mm:
Ec. [
10]
( ) Para una superficie maquinada se determina el Csup con ayuda de la tabla 9.
( ) Ec. [ 11]
Maquinado o rolado en frio A = 4,51 y B = -0,265.
( )
Entonces:
Tabla 10. Coeficientes del factor de superficie.
Fuente: Shigley y Mischke, Mechanical Engineering Desing, 5a. ed., McGraw-Hill, Nueva York, 1989, p. 283. Para T ≤ 450°C (840°F):
Para una confiabilidad de 99,99%:
Entonces con la ecuación [7]:

68
A continuación, se determinan los esfuerzos necesarios para el cálculo de los ciclos de vida y así mismo del factor de seguridad resultante. Para ello es necesario hallar el centroide y la inercia de la viga que resultan ser de c = 0,529 m e I = 8,673E-6 m4 los cuales se obtuvieron con ayuda del programa Autodesk Inventor 2017. Así que esfuerzo máximo (σmáx) y mínimo (σmin) son:
Ec. [ 12]
Seguido de esto, se determina el esfuerzo promedio (σm) y alternante (σa) con las ecuaciones obtenidas del libro “Diseño en ingeniería mecánica” de Shigley, capitulo 6:
Ec. [ 13]
|
| Ec. [ 14]
A Continuación, se determina el factor de seguridad de fatiga con el criterio de falla de Goodman modificado y de Langer.
Ec. [ 15]
Observando este factor de seguridad obtenido, se puede deducir que la viga esta sobre dimensionada para las condiciones en las que se va a usar, esto sucede debido a que los esfuerzos a los que será sometida son demasiado bajos por ser una bicicleta y porque el material que trae el actuador de fábrica tiene un Sut alto. Sin embargo, fue la mejor opción comercial encontrada para dicho fin. Finalmente continuando con el libro “Diseño de máquinas” de Norton, capitulo 4, se halla el número de ciclos de vida que tiene la viga transportadora.
Ec. [ 16]
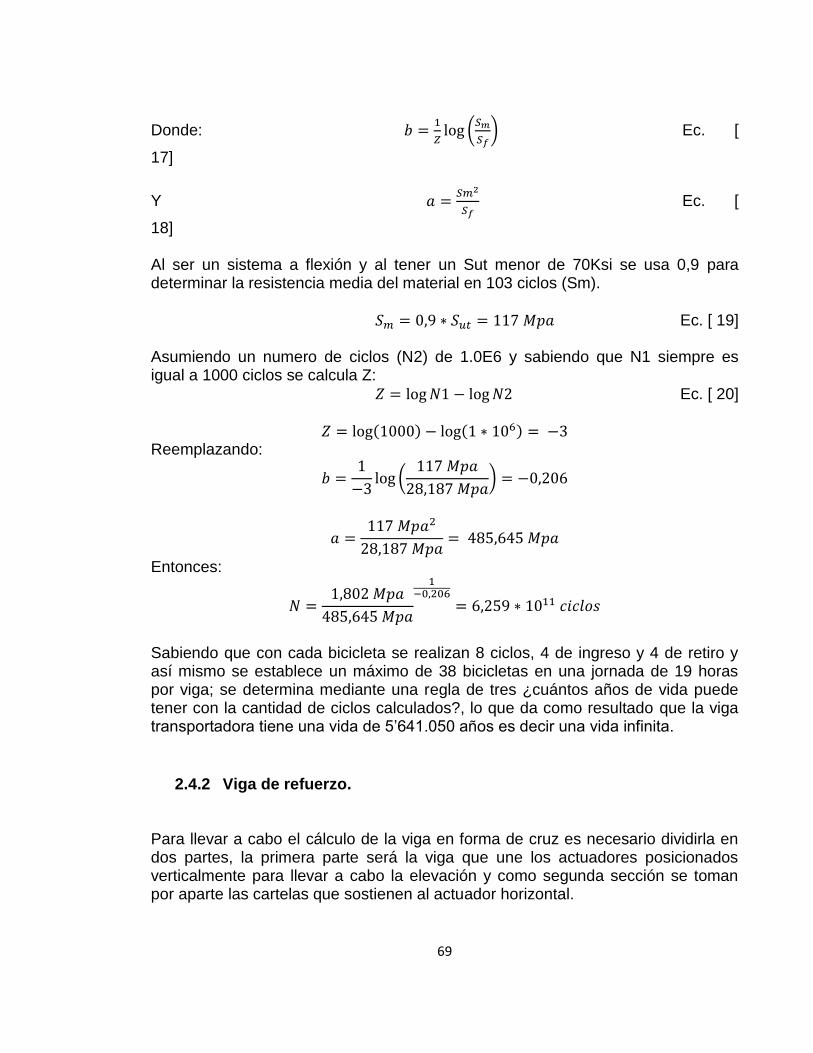
69
Donde:
(
) Ec. [
17]
Y
Ec. [
18] Al ser un sistema a flexión y al tener un Sut menor de 70Ksi se usa 0,9 para determinar la resistencia media del material en 103 ciclos (Sm).
Ec. [ 19] Asumiendo un numero de ciclos (N2) de 1.0E6 y sabiendo que N1 siempre es igual a 1000 ciclos se calcula Z:
Ec. [ 20]
( ) ( ) Reemplazando:
(
)
Entonces:
Sabiendo que con cada bicicleta se realizan 8 ciclos, 4 de ingreso y 4 de retiro y así mismo se establece un máximo de 38 bicicletas en una jornada de 19 horas por viga; se determina mediante una regla de tres ¿cuántos años de vida puede tener con la cantidad de ciclos calculados?, lo que da como resultado que la viga transportadora tiene una vida de 5’641.050 años es decir una vida infinita.
2.4.2 Viga de refuerzo. Para llevar a cabo el cálculo de la viga en forma de cruz es necesario dividirla en dos partes, la primera parte será la viga que une los actuadores posicionados verticalmente para llevar a cabo la elevación y como segunda sección se toman por aparte las cartelas que sostienen al actuador horizontal.

70
2.4.2.1 Viga indeterminada. Al ser parte del apoyo de la viga transportadora, esta como la sección del siguiente numeral, son vigas que están sometidas cambios en sus esfuerzos, es por ello por lo que el cálculo se realiza por los métodos de fatiga vistos en el anterior ejercicio. Para este paso también es necesario determinar el caso más y el menos crítico. Por otro lado, al observar el acople entre los actuadores de elevación junto con la viga de refuerzo se puede llegar a la conclusión de que esta se convierte en una viga indeterminada o hiperestática por estar empotrada en sus dos extremos. Es por esto por lo que el cálculo de sus momentos máximos se realiza de manera diferente a los de una viga normal, ya que por el método convencional no es posible determinarlos. Inicialmente se calcula el caso más crítico el cual sucede cuando la bicicleta Fat se encuentra dentro del sistema de parqueo. Así pues, se realiza el sumatorio total de todos los componentes que se sitúan sobre esta primera sección del soporte, en los cuales están incluidos también el peso del actuador sin vástago horizontal y también las masas de las dos vigas acarteladas unidas a esta sección. Lo que da como resultado una carga distribuida de 15,023 KN/m. Figura 38. Diagrama de viga hiperestática con la mayor carga.
Fuente: Autores. Se pasa la carga distribuida a puntual del mismo modo al de la ecuación [4]:
Al ser de esta forma la viga y al estar la carga ubicada en la mitad de esta, provoca que las reacciones sean la mitad del valor de la carga, lo que da como resultado:

71
Donde RA es la reacción en el punto A y RB es la reacción en el punto B. Para poder determinar la ecuación de momento máximo se debe realizar el método de la doble integración, donde E es el módulo de elasticidad de la viga, “I” es el momento de inercia y “Y” corresponde a la deflexión máxima de la viga.
Entonces 1 corte: .
Ec. [ 21]
Si X=0 la pendiente en x (θx=0) y la deflexión (Yx=0) es igual a cero:
Ahora, para poder determinar la ecuación de la deflexión máxima se realiza el mismo método de la doble integración en el 2do corte:
( )
( )
( )
Ec. [ 22]
Para determinar C3 y C4, se aplica el principio de continuidad en el punto medio de la viga (0,547m).
( ) ( ) ( ) ( )
( )
( )
( )
( )
Entonces, para determinar el momento máximo (M) se usa la ecuación 21 con un x = 0,6m que es donde se presenta el mayor momento.

72
( ) ( ) ( )
Entonces, para determinar el valor de la deflexión se usa la ecuación 2 con una X = 0,6 m. Donde E = 68,9Gpa, b= 0,106m, a= 0,1m.
(
( )
)
(
( )
)
Figura 39. Diagrama de esfuerzo cortante y momento flector de la viga indeterminada.
Fuente: Autores.
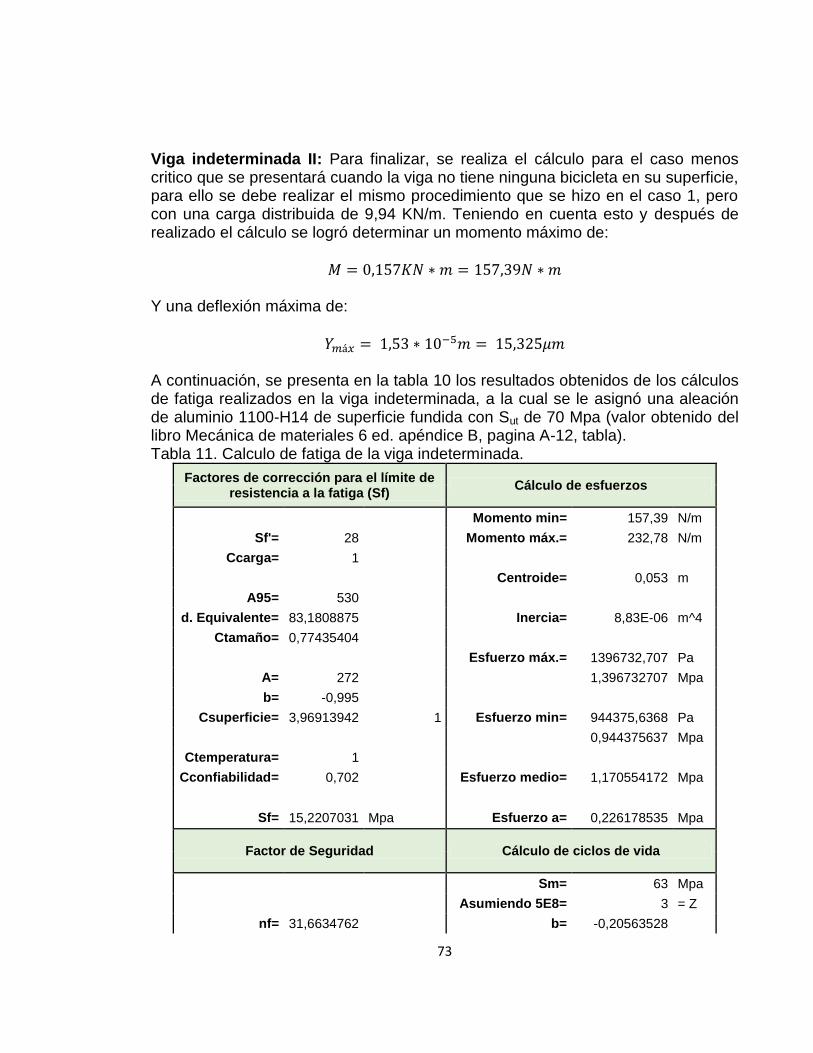
73
Viga indeterminada II: Para finalizar, se realiza el cálculo para el caso menos critico que se presentará cuando la viga no tiene ninguna bicicleta en su superficie, para ello se debe realizar el mismo procedimiento que se hizo en el caso 1, pero con una carga distribuida de 9,94 KN/m. Teniendo en cuenta esto y después de realizado el cálculo se logró determinar un momento máximo de:
Y una deflexión máxima de:
A continuación, se presenta en la tabla 10 los resultados obtenidos de los cálculos de fatiga realizados en la viga indeterminada, a la cual se le asignó una aleación de aluminio 1100-H14 de superficie fundida con Sut de 70 Mpa (valor obtenido del libro Mecánica de materiales 6 ed. apéndice B, pagina A-12, tabla). Tabla 11. Calculo de fatiga de la viga indeterminada.
Factores de corrección para el límite de resistencia a la fatiga (Sf)
Cálculo de esfuerzos
Momento min= 157,39 N/m
Sf'= 28 Momento máx.= 232,78 N/m
Ccarga= 1
Centroide= 0,053 m
A95= 530
d. Equivalente= 83,1808875 Inercia= 8,83E-06 m^4
Ctamaño= 0,77435404
Esfuerzo máx.= 1396732,707 Pa
A= 272 1,396732707 Mpa
b= -0,995
Csuperficie= 3,96913942 1 Esfuerzo min= 944375,6368 Pa
0,944375637 Mpa
Ctemperatura= 1
Cconfiabilidad= 0,702 Esfuerzo medio= 1,170554172 Mpa
Sf= 15,2207031 Mpa Esfuerzo a= 0,226178535 Mpa
Factor de Seguridad Cálculo de ciclos de vida
Sm= 63 Mpa
Asumiendo 5E8= 3 = Z
nf= 31,6634762 b= -0,20563528

74
a= 260,76325
N= 7,75254E+14 ciclos
Fuente: Autores.
2.4.2.2 Viga de sección variable. La sección acartelada de la viga de refuerzo tiene forma trapezoidal, donde la altura menor (ho) es de 0,02 m y la mayor (H) es de 0,1 m, tiene una longitud (L) de 0,5355 m y un ancho de base (b) constante de punta a punta de 0,106 m. Teniendo en cuenta esto, se determinará el punto de la viga donde se realiza un mayor esfuerzo, para ello es necesario calcularlo en 2 secciones como lo son en H y h dependiendo la posición de x. Inicialmente se tomó la carga distribuida y se convirtió en una carga puntual con la ecuación 4 dando como resultado un valor de P = 1412,074 N, la cual se ubica en extremo A de la cartela, así como se muestra en la figura 40. Figura 40. Viga de seccion variable.
Fuente: Autores, Libro. A continuación, se realiza un corte en la viga y se determina el momento del corte en función de su posición en x:
Donde x es la distancia desde el punto cero hasta el punto donde se realizó el corte. Seguido de esto se obtiene la ecuación de la altura variable dependiente del valor de x:
( ) Ec. [ 23]
75
Con este nuevo valor de h es posible determinar el centroide y la inercia de la viga acartelada:
( )
Inercia:
(
( ))
Entonces al aplicar la fórmula de la flexión se obtiene:
( )
(
( ))
( ) Ec. [ 24]
Para hallar el valor de x donde ocurre el esfuerzo normal máximo absoluto se debe derivar la ecuación 24 con respecto a x e igualarlo a cero; lo que da como resultado:
Entonces, x se sustituye en la ecuación de la flexión y se simplifica obteniendo el esfuerzo normal máximo absoluto.
(
)
( (
) )
Ec. [ 25]
Para corroborar la afirmación anterior, se calcula cuando x=L en el extremo B el
esfuerzo normal máximo ( ) es:
El cual es 36% menor que el esfuerzo máximo absoluto. Finalmente, en la ecuación 25 se reemplazan los valores enunciados al inicio del cálculo, con lo que se obtiene un esfuerzo máximo:

76
Ahora se calcula el esfuerzo normal máximo en la altura más amplia (H), primero se pasa la carga distribuida a una fuerza puntual:
Entonces:
( )
( ) (
)
( )
( )
(( ) (
)) (
)
( )( )
( )
Viga de sección variable II: A continuación, se realiza el cálculo para el caso menos critico que se presentará cuando la viga no tiene ninguna bicicleta en su superficie, para ello se debe realizar el mismo procedimiento que se hizo en el caso anterior, pero con una carga puntual de un valor de P = 872,764 N. Teniendo en cuenta esto después de realizado el cálculo se logró determinar el esfuerzo normal máximo absoluto de la ecuación 25:
Seguidamente, se calcula el esfuerzo normal máximo en la altura más amplia (H).
( ) A continuación, se presenta en la tabla 10 los resultados obtenidos de los cálculos de fatiga realizados en la viga indeterminada, a la cual se le asignó una aleación de aluminio 1100-H14 de superficie fundida con Sut de 70 Mpa (valor obtenido del libro Mecánica de materiales 6 ed. apéndice B, pagina A-12, tabla). Tabla 12. Calculo de fatiga de la viga con sección variable.
Factores de corrección para el límite de resistencia a la fatiga (Sf)
Cálculo de esfuerzos
Sf'= 28 Esfuerzo máx.= 2140091,397 Pa
Ccarga= 1 2,140091397 Mpa
A95= 530 Esfuerzo min= 1322731,477 Pa
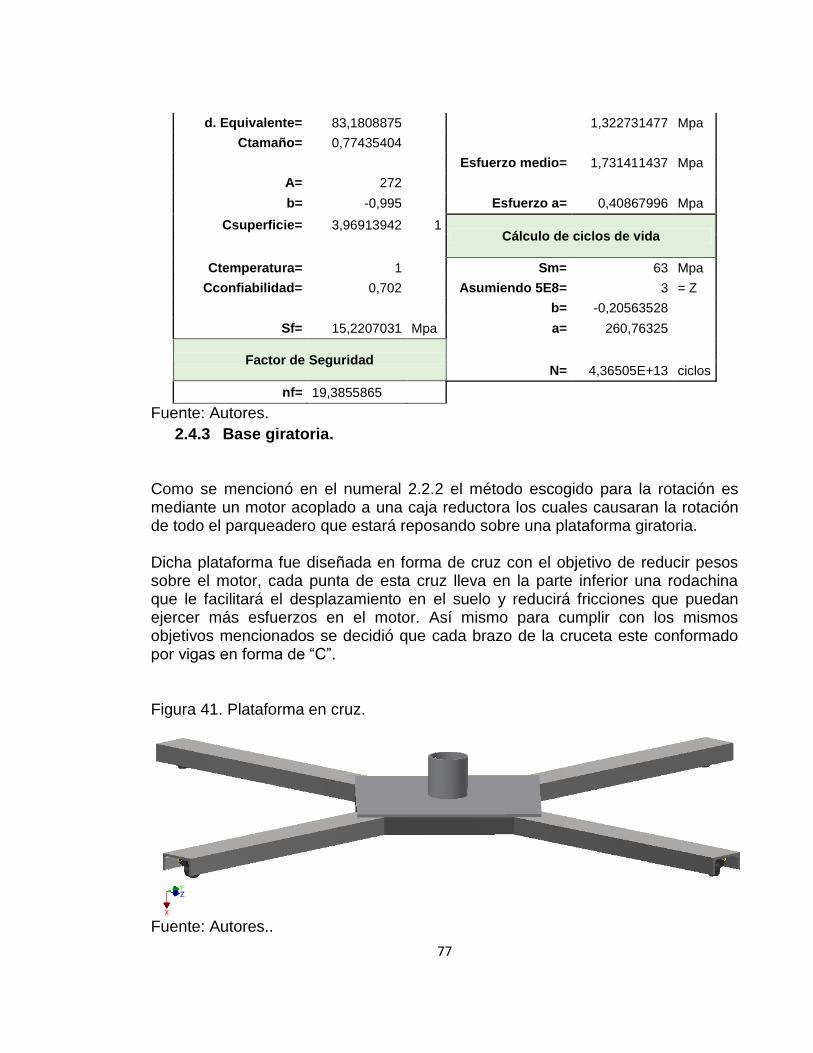
77
d. Equivalente= 83,1808875 1,322731477 Mpa
Ctamaño= 0,77435404
Esfuerzo medio= 1,731411437 Mpa
A= 272
b= -0,995 Esfuerzo a= 0,40867996 Mpa
Csuperficie= 3,96913942 1 Cálculo de ciclos de vida
Ctemperatura= 1 Sm= 63 Mpa
Cconfiabilidad= 0,702 Asumiendo 5E8= 3 = Z
b= -0,20563528
Sf= 15,2207031 Mpa a= 260,76325
Factor de Seguridad
N= 4,36505E+13 ciclos
nf= 19,3855865
Fuente: Autores.
2.4.3 Base giratoria. Como se mencionó en el numeral 2.2.2 el método escogido para la rotación es mediante un motor acoplado a una caja reductora los cuales causaran la rotación de todo el parqueadero que estará reposando sobre una plataforma giratoria. Dicha plataforma fue diseñada en forma de cruz con el objetivo de reducir pesos sobre el motor, cada punta de esta cruz lleva en la parte inferior una rodachina que le facilitará el desplazamiento en el suelo y reducirá fricciones que puedan ejercer más esfuerzos en el motor. Así mismo para cumplir con los mismos objetivos mencionados se decidió que cada brazo de la cruceta este conformado por vigas en forma de “C”. Figura 41. Plataforma en cruz.
Fuente: Autores..
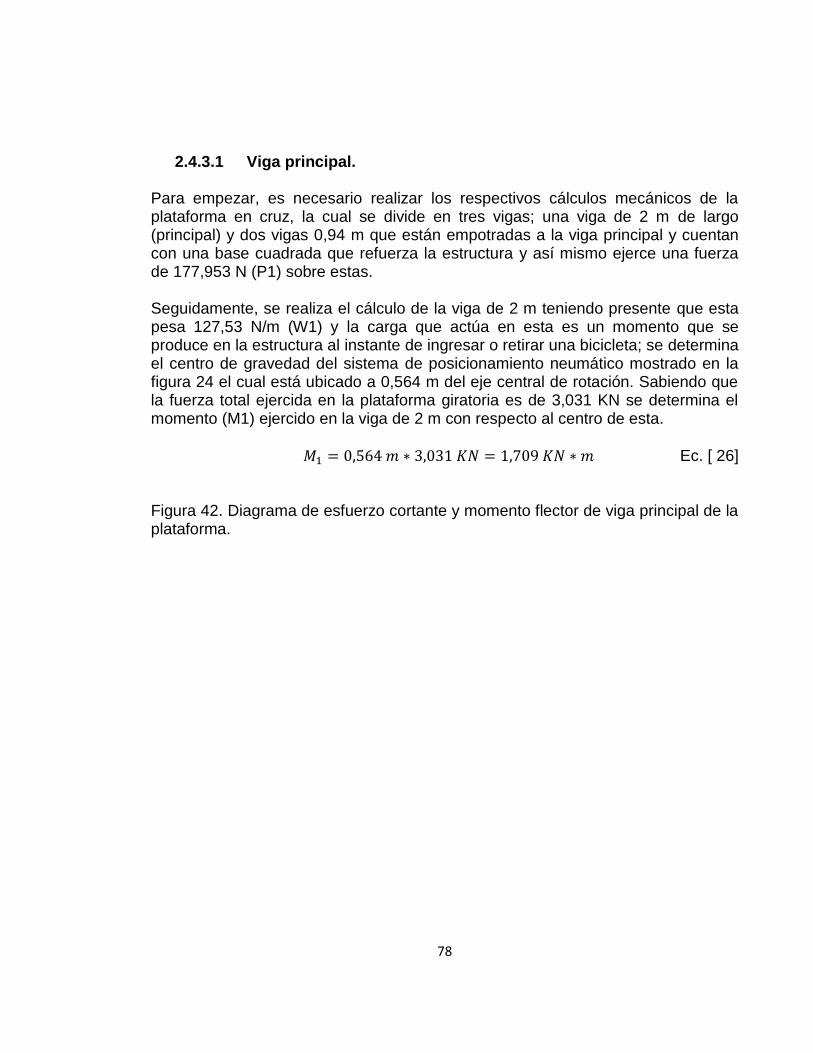
78
2.4.3.1 Viga principal. Para empezar, es necesario realizar los respectivos cálculos mecánicos de la plataforma en cruz, la cual se divide en tres vigas; una viga de 2 m de largo (principal) y dos vigas 0,94 m que están empotradas a la viga principal y cuentan con una base cuadrada que refuerza la estructura y así mismo ejerce una fuerza de 177,953 N (P1) sobre estas. Seguidamente, se realiza el cálculo de la viga de 2 m teniendo presente que esta pesa 127,53 N/m (W1) y la carga que actúa en esta es un momento que se produce en la estructura al instante de ingresar o retirar una bicicleta; se determina el centro de gravedad del sistema de posicionamiento neumático mostrado en la figura 24 el cual está ubicado a 0,564 m del eje central de rotación. Sabiendo que la fuerza total ejercida en la plataforma giratoria es de 3,031 KN se determina el momento (M1) ejercido en la viga de 2 m con respecto al centro de esta.
Ec. [ 26] Figura 42. Diagrama de esfuerzo cortante y momento flector de viga principal de la plataforma.

79
Fuente: Autores. De la figura 42 se puede apreciar que el momento máximo presentado sobre la viga cuando se encuentra la bicicleta más pesada es de 998,58 N*m; realizando este mismo procedimiento para el caso en que no hay bicicleta se obtiene un momento (M1) de 1,405 KN*m, con el cual se obtiene un momento máximo de 846,58 N*m. Con estos dos valores obtenidos y asignándole a la viga un acero AISI 1030 rolado en caliente sometido a un esfuerzo cortante con Sut de 469 Mpa, se procede a realizar el cálculo de fatiga mostrada a continuación. Tabla 13. Calculo de fatiga de viga principal de la plataforma.

80
Factores de corrección para el límite de
resistencia a la fatiga (Sf) Cálculo de esfuerzos
Momento min: 846,58 N*m
Sf'= 187,6 Momento máx.: 998,58 N*m
Ccarga= 1
Centroide: 0,06 m
A95= 330
d. Equivalente= 65,6360724 Inercia: 4,31E-07 m^4
Ctamaño= 0,79235358
Esfuerzo máx.: 139135755,8 Pa
A= 57,7 139,1357558 Mpa
b= -0,718
Csuperficie= 0,6970657 Esfuerzo min: 117957047,1 Pa
117,9570471 Mpa
Ctemperatura= 1
Cconfiabilidad= 0,702 Esfuerzo medio: 128,5464015 Mpa
Sf= 72,7382222 Mpa Esfuerzo a 10,58935432 Mpa
Factor de Seguridad Cálculo de ciclos de vida
Sm= 422,1 Mpa
Asumiendo 5E8 3 = Z
nf= 2,38283682 b= -0,25455089
a= 2449,446861
N= 1939655120 ciclos
Fuente: Autores.
2.4.3.2 Viga empotrada. Ahora se procede a calcular la viga empotrada en la viga principal, teniendo en cuenta que cada una de estas vigas empotradas cuentan con un apoyo móvil ubicado a 0,9 m del empotramiento lo que hace de esta una viga hiperestática; así mismo sobre cada una de estas vigas reposa un actuador vertical sin vástago el cual se encuentra sujetado con “Fijación por pies HP” suministrado por la empresa Festo [32]. Figura 43. Diagrama de fuerzas en la viga empotrada de la base giratoria.

81
Fuente: Autores. Las fuerzas especificadas en la figura 43 son:
- P1: Fuerza puntual ejercida por la base cuadrada. - P2: Carga puntual ejercida por el actuador neumático vertical. - P3: Representa el apoyo móvil.
Para determinar el apoyo móvil se aplicó el método de vigas conjugadas mostrado en el libro Mecánica de materiales de Hibbeler sexta edición, capitulo12. Para realizar este procedimiento es necesario revisar el formulario de deflexión del libro Diseño en Ingeniería Mecánica de Shigley, anexo: tabla A-9. Figura 44. Formulario de deflexión para una viga en voladizo: carga intermedia.
Fuente: Diseño en ingeniería mecánica de Shigley, Anexo: tabla A-9, pág.993. Figura 45. Formulario de deflexión para una viga en voladizo: carga uniforme.

82
Fuente: Autores. Al observar la viga a calcular se determina que esta viga está compuesta por tres vigas empotradas y cada una con una carga ubicada a determinada distancia, una de estas cargas representa la reacción en B (P3). Figura 46. Vigas que componen la viga empotrada de la base giratoria.
Fuente: Autores.

83
Observando las figuras 44, 45 y 46 se determina la ecuación de deflexión la cual corresponderá a cada una de las cuatro vigas mostradas, donde las tres primeras se sumarán y se les restará la correspondiente a Rb, quedando la ecuación de esta manera:
( ) Ec. [ 27]
(
(
)
(
)
)
(
)
Se despeja Rb:
( ) (
)
( )
Se procede a realizar el diagrama de esfuerzo cortante y momento flector con el programa MdSolids mostrado en la figura 47. Figura 47. Diagrama de cortante y momento flector de la viga empotrada de la base giratoria.
Fuente: Autores.
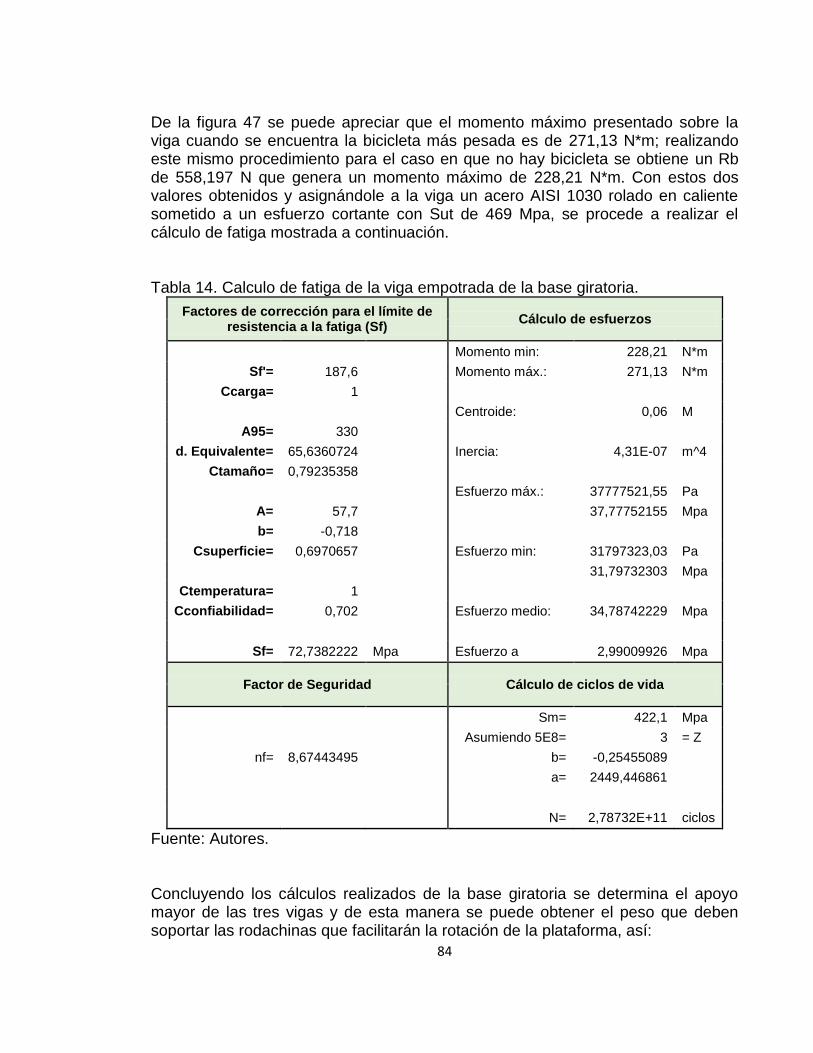
84
De la figura 47 se puede apreciar que el momento máximo presentado sobre la viga cuando se encuentra la bicicleta más pesada es de 271,13 N*m; realizando este mismo procedimiento para el caso en que no hay bicicleta se obtiene un Rb de 558,197 N que genera un momento máximo de 228,21 N*m. Con estos dos valores obtenidos y asignándole a la viga un acero AISI 1030 rolado en caliente sometido a un esfuerzo cortante con Sut de 469 Mpa, se procede a realizar el cálculo de fatiga mostrada a continuación. Tabla 14. Calculo de fatiga de la viga empotrada de la base giratoria.
Factores de corrección para el límite de resistencia a la fatiga (Sf)
Cálculo de esfuerzos
Momento min: 228,21 N*m
Sf'= 187,6 Momento máx.: 271,13 N*m
Ccarga= 1
Centroide: 0,06 M
A95= 330
d. Equivalente= 65,6360724 Inercia: 4,31E-07 m^4
Ctamaño= 0,79235358
Esfuerzo máx.: 37777521,55 Pa
A= 57,7 37,77752155 Mpa
b= -0,718
Csuperficie= 0,6970657 Esfuerzo min: 31797323,03 Pa
31,79732303 Mpa
Ctemperatura= 1
Cconfiabilidad= 0,702 Esfuerzo medio: 34,78742229 Mpa
Sf= 72,7382222 Mpa Esfuerzo a 2,99009926 Mpa
Factor de Seguridad Cálculo de ciclos de vida
Sm= 422,1 Mpa
Asumiendo 5E8= 3 = Z
nf= 8,67443495 b= -0,25455089
a= 2449,446861
N= 2,78732E+11 ciclos
Fuente: Autores. Concluyendo los cálculos realizados de la base giratoria se determina el apoyo mayor de las tres vigas y de esta manera se puede obtener el peso que deben soportar las rodachinas que facilitarán la rotación de la plataforma, así:

85
La reacción máxima presentada es de 1,107 KN que al dividirlo en 9,81 m/s2 da como resultado una masa de 113 Kg. En base a esto se escoge la rodachina de la marca IMSA (Industrias Metálicas Sudamericanas S.A. con referencia ROD 5-AF-036-A-F00/RA-1/2-PL-NE-TZ, la cual puede soportar hasta 135 Kg ya que está constituida con Rin de acero y una banda de caucho (Anexo 14).
2.4.3.3 Elección del motor. A continuación, se requiere calcular el motor adecuado para el correcto movimiento del dispositivo, teniendo presentes factores como el peso a mover (3774,615 N) el cual está comprendido por la masa de todos los componentes mencionados anteriormente y la velocidad de rotación la cual se calcula de la siguiente manera:
Ec. [ 28]
Dónde: V: es la velocidad lineal medida en m/s. d: es el perímetro de la plataforma el cual es de 7,395.
t: es el tiempo (30 segundos) que se debe demorar la plataforma en recorrer la distancia calculada, este valor fue establecido por los autores.
Entonces:
Seguido de esto, se procede a calcular la potencia mecánica del sistema:
Ec. [ 29]
Teniendo esta potencia mecánica es posible determinar la potencia del motor así:
Ec. [ 30]
Dónde: Factor de servicio: es de 1,5 tomado de la tabla 12. Eficiencia: es de 0.85, valor que fue asumido por ser el más comúnmente
usado.

86
Tabla 15. Factores para calcular el margen compensatorio de seguridad.
Fuente: PDF, Manual piñones INTERMEC. Entonces:
Ahora se determina la velocidad angular (W) deseada.
La frecuencia (f) de la velocidad angular es:
Se pasa a RPM:
Finalmente se calcula el torque (T) adecuado para la plataforma giratoria tomando la potencia del motor en Watts así:

87
Comercialmente se escogió un motor trifásico de 3 HP y de 1465 rpm de la empresa NORD DRIVESYSTEM el cual lleva acoplada una caja reductora de engranajes cilíndricos helicoidales que aseguran una velocidad angular de salida de 2 rpm con un torque de hasta 10250 Nm que cumplen con los parámetros calculados. El motor es de referencia SK 9086.1/52 – 100LP/4 BRE20 MG20, para información más detallada revisar el anexo 7. Para la instalación de dicho motor se realiza un orificio en el suelo del parqueadero con el espacio adecuado para la ubicación de este; este motor cuenta con una fijación en el pie que permite atornillarlo al socavón del parqueadero, sin embargo, entre el motor y el suelo contará con () de caucho que reducirá las vibraciones de este, para dar una correcta fijación se le adicionaran cuatro “L” metálicas con sus respectivos orificios para la implementación de pernos de expansión. El motorreductor cuenta con un eje de acero de diámetro de 120mm y así mismo posee una cuña rectangular que garantiza la correcta fijación y rotación del sistema. En la parte eléctrica funciona con una tensión nominal de 230/400 V, una corriente de arranque de 7,4 Amperios (A), una nominal de 4,27 A y una frecuencia de 50 Hz. También contará con un sistema de freno eléctrico de 20 Nm de torque y al igual que el motor también funcionará con una tensión de 230 V. Además, se le implementa un encoder magnético de 32 pulsos de los cuales serán contados tan solo 19 de estos, ubicados según el ángulo de cada bahía; ya que en cada piso del parqueadero se podrán ubicar 19 bahía a excepción del primero que solo contara con 17 bahía debido a la puerta.
2.4.4 Validaciones por elementos finitos. De acuerdo con los numerales 2.4.1, 2.4.2 y con ayuda del software Autodesk Inventor se procede a realizar una validación en conjunto de las dos vigas por elementos finitos, para comprobar los cálculos realizados anteriormente. Figura 48. Tensión de Von Mises máxima entre viga de refuerzo y viga transportadora.
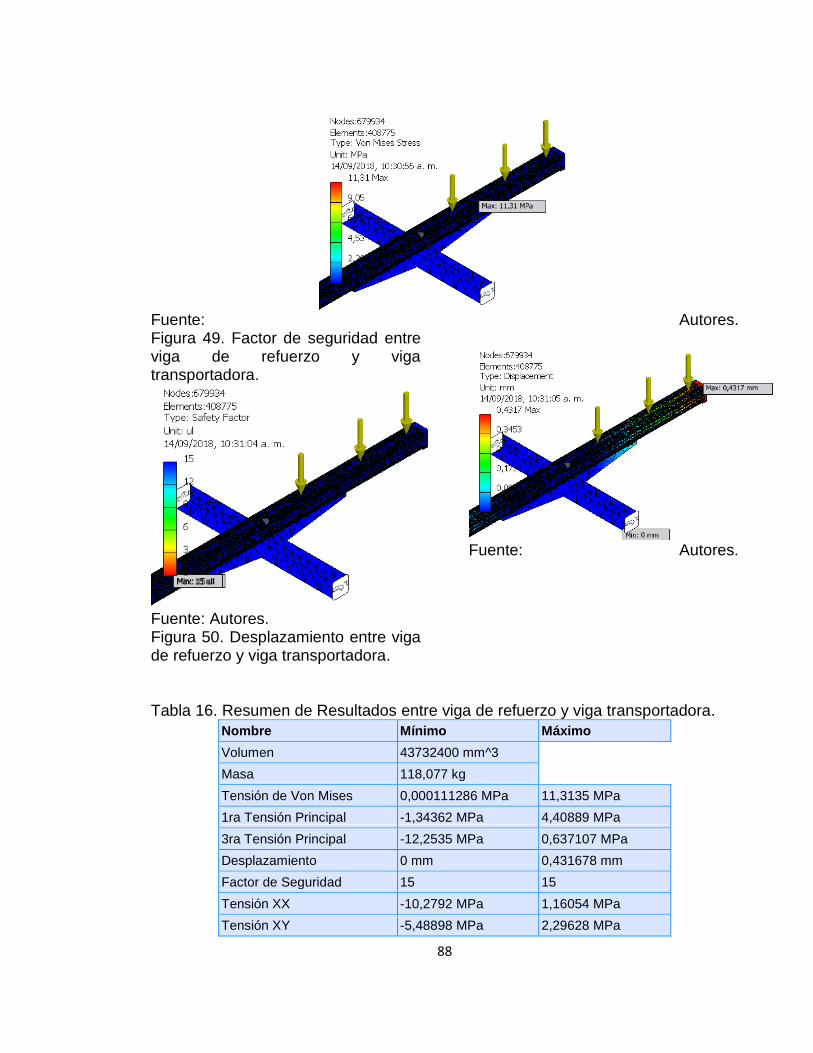
88
Fuente: Autores.Figura 49. Factor de seguridad entre viga de refuerzo y viga transportadora.
Fuente: Autores. Figura 50. Desplazamiento entre viga de refuerzo y viga transportadora.
Fuente: Autores.
Tabla 16. Resumen de Resultados entre viga de refuerzo y viga transportadora.
Nombre Mínimo Máximo
Volumen 43732400 mm^3
Masa 118,077 kg
Tensión de Von Mises 0,000111286 MPa 11,3135 MPa
1ra Tensión Principal -1,34362 MPa 4,40889 MPa
3ra Tensión Principal -12,2535 MPa 0,637107 MPa
Desplazamiento 0 mm 0,431678 mm
Factor de Seguridad 15 15
Tensión XX -10,2792 MPa 1,16054 MPa
Tensión XY -5,48898 MPa 2,29628 MPa
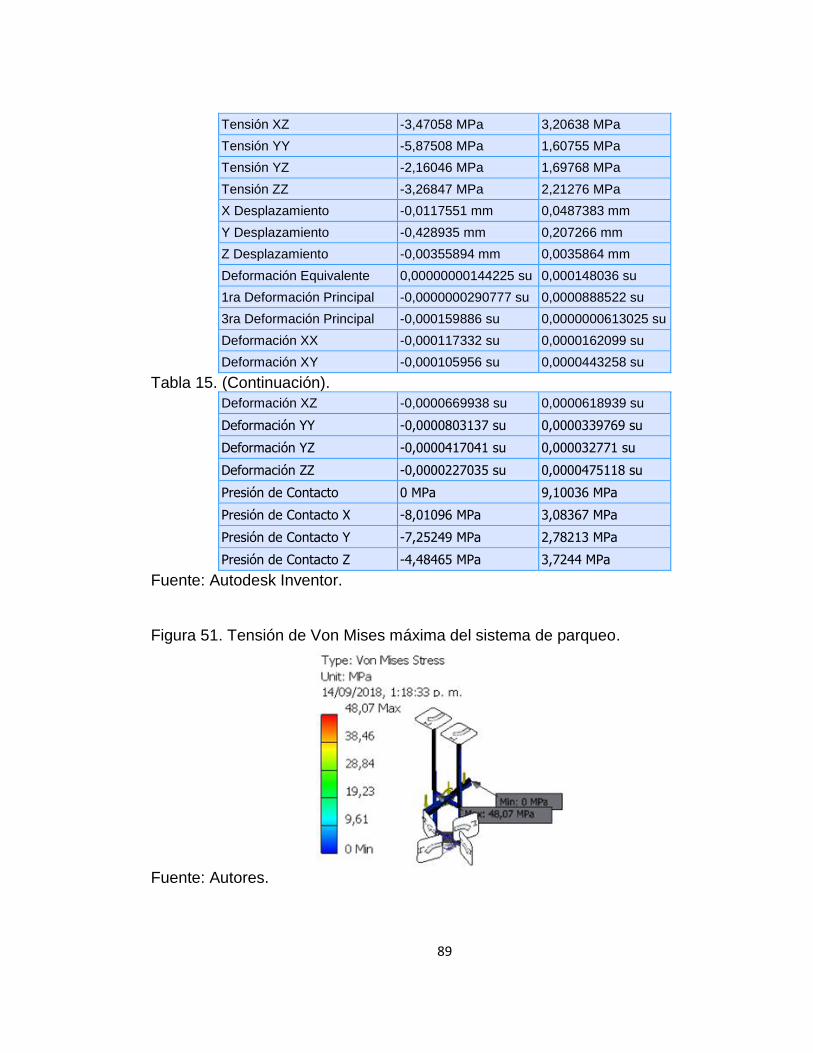
89
Tensión XZ -3,47058 MPa 3,20638 MPa
Tensión YY -5,87508 MPa 1,60755 MPa
Tensión YZ -2,16046 MPa 1,69768 MPa
Tensión ZZ -3,26847 MPa 2,21276 MPa
X Desplazamiento -0,0117551 mm 0,0487383 mm
Y Desplazamiento -0,428935 mm 0,207266 mm
Z Desplazamiento -0,00355894 mm 0,0035864 mm
Deformación Equivalente 0,00000000144225 su 0,000148036 su
1ra Deformación Principal -0,0000000290777 su 0,0000888522 su
3ra Deformación Principal -0,000159886 su 0,0000000613025 su
Deformación XX -0,000117332 su 0,0000162099 su
Deformación XY -0,000105956 su 0,0000443258 su
Tabla 15. (Continuación).
Deformación XZ -0,0000669938 su 0,0000618939 su
Deformación YY -0,0000803137 su 0,0000339769 su
Deformación YZ -0,0000417041 su 0,000032771 su
Deformación ZZ -0,0000227035 su 0,0000475118 su
Presión de Contacto 0 MPa 9,10036 MPa
Presión de Contacto X -8,01096 MPa 3,08367 MPa
Presión de Contacto Y -7,25249 MPa 2,78213 MPa
Presión de Contacto Z -4,48465 MPa 3,7244 MPa
Fuente: Autodesk Inventor. Figura 51. Tensión de Von Mises máxima del sistema de parqueo.
Fuente: Autores.

90
Figura 52. Factor de seguridad del sistema de parqueo.
Fuente: Autores. Figura 53. Desplazamiento del sistema de parqueo.
Fuente: Autores.
Tabla 17. Resumen de Resultados del sistema de parqueo.
Nombre Mínimo Máximo
Volumen 171162000 mm^3
Masa 600,063 kg
Tensión de Von Mises 0,0000855713 MPa 117,04 MPa
1ra Tensión Principal -17,1887 MPa 99,4932 MPa
3ra Tensión Principal -85,2305 MPa 13,7668 MPa
Desplazamiento 0 mm 88,5488 mm
Factor de Seguridad 1,01032 ul 15 ul
Tensión XX -40,0831 MPa 42,5902 MPa
Tensión XY -33,3534 MPa 28,7283 MPa
Tensión XZ -20,0244 MPa 24,6094 MPa
Tensión YY -76,0625 MPa 73,0017 MPa
Tensión YZ -37,4059 MPa 45,5734 MPa
Tensión ZZ -51,7408 MPa 44,8071 MPa
X Desplazamiento -18,2651 mm 10,6994 mm
Y Desplazamiento -88,2788 mm 0,906608 mm
Z Desplazamiento -1,73368 mm 2,53404 mm
Deformación Equivalente
0,00000000121471 ul 0,0207697 ul
1ra Deformación Principal
-0,00000125794 ul 0,0213715 ul
3ra Deformación Principal
-0,0177831 ul 0,00000350989 ul
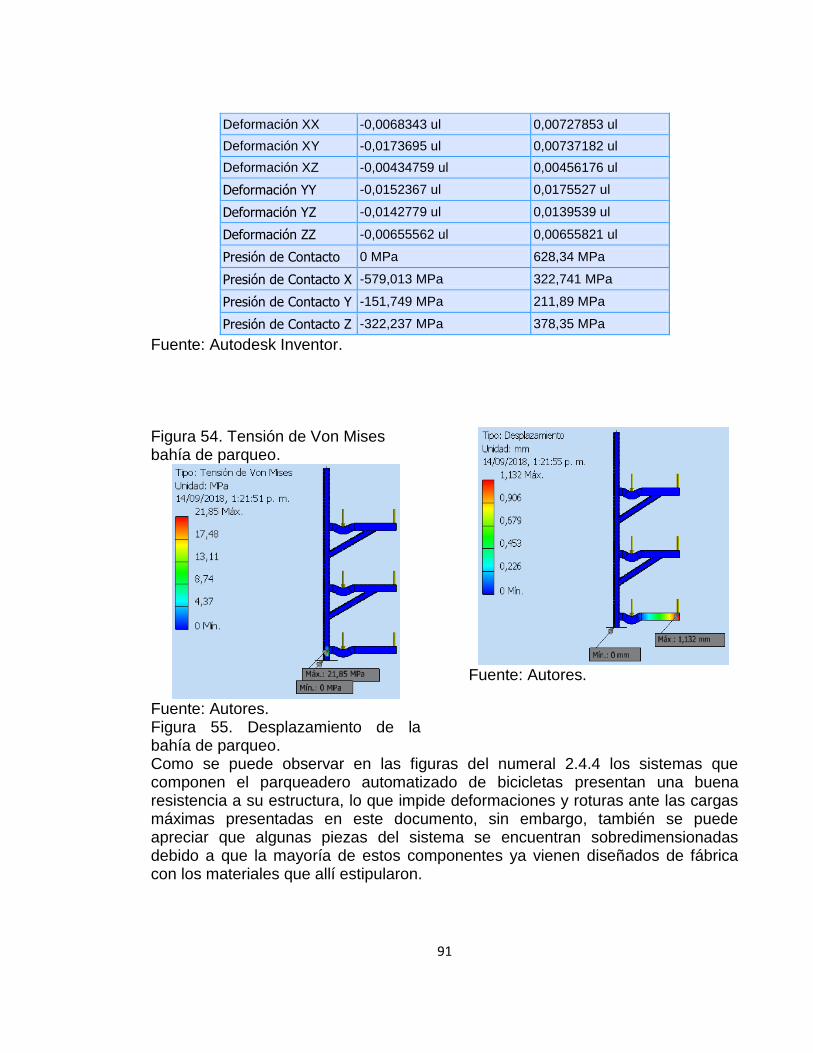
91
Deformación XX -0,0068343 ul 0,00727853 ul
Deformación XY -0,0173695 ul 0,00737182 ul
Deformación XZ -0,00434759 ul 0,00456176 ul
Deformación YY -0,0152367 ul 0,0175527 ul
Deformación YZ -0,0142779 ul 0,0139539 ul
Deformación ZZ -0,00655562 ul 0,00655821 ul
Presión de Contacto 0 MPa 628,34 MPa
Presión de Contacto X -579,013 MPa 322,741 MPa
Presión de Contacto Y -151,749 MPa 211,89 MPa
Presión de Contacto Z -322,237 MPa 378,35 MPa
Fuente: Autodesk Inventor. Figura 54. Tensión de Von Mises bahía de parqueo.
Fuente: Autores. Figura 55. Desplazamiento de la bahía de parqueo.
Fuente: Autores.
Como se puede observar en las figuras del numeral 2.4.4 los sistemas que componen el parqueadero automatizado de bicicletas presentan una buena resistencia a su estructura, lo que impide deformaciones y roturas ante las cargas máximas presentadas en este documento, sin embargo, también se puede apreciar que algunas piezas del sistema se encuentran sobredimensionadas debido a que la mayoría de estos componentes ya vienen diseñados de fábrica con los materiales que allí estipularon.

92
2.5 DISEÑO Y SIMULACION DEL SISTEMA DE CONTROL. Teniendo en cuenta que la electroneumática fue el tipo de energía escogida para llevar a cabo el presente proyecto y así mismo cumpliendo con los parámetros de la fase 1 del parqueadero es necesario continuar con el mismo terminal de control PLC (Controlador Lógico Programable) de referencia CPX 197330 (Anexo 12) proporcionado por la empresa Festo. Dicho controlador tiene la ventaja de ser de tipo modular lo que permite integrar más módulos de entradas y salidas ya que en la presente fase del proyecto el número de señales es mayor.
2.5.1 Definición de entradas y salidas. Para llevar a cabo esta selección es necesario realizar un estudio de todos los elementos que intervienen en la función del parqueadero ya sean dispositivos de lectura como elementos actuadores, esta revisión será detallada en la tabla 15 con la que se determinará el total de entradas y salidas requeridas. Tabla 18. Descripción de señales.
Variable Equipo asociado Descripción
ENTRADAS
START Botón Virtual Activa el sistema
OFF Botón Virtual Apaga el sistema
REARME Botón Virtual Lleva el sistema a posición inicial
EMERGENCIA Botón físico Detiene el sistema
RETIRO Botón físico (TARJETA)
Activa el sistema para el retiro de bicicleta
P1, P2 Sensor posición Posición pinza abierta
AH1 Sensor posición Posición 1 Actuador sin vástago horizontal
AH2 Sensor posición Posición 2 Actuador sin vástago horizontal
C1 Sensor posición Posición 1 Cilindro con vástago
C2 Sensor posición Posición 2 Cilindro con vástago
AV1, AV4 Sensor posición Posición 1 Actuadores verticales sin vástago
AV2, AV5 Sensor posición Posición 2 Actuadores verticales sin vástago
AV3, AV6 Sensor posición Posición 3 Actuadores verticales sin vástago
PRESIÓN Sensor Digital Detiene el cierre de la pinza
ENCODER Sensor Digital Indica la posición del motor
B1-B55 Sensor Digital Indica disponibilidad de bahías

93
Total 73 entradas digitales y 1 para encoder
SALIDAS
Y1 Válvula solenoide Permite el cierre de la pinza
Y2 Válvula solenoide Permite la apertura de la pinza
Y3 Válvula solenoide Desplaza el actuador sin vástago horizontal a la posición 2
Y4 Válvula solenoide Desplaza el actuador sin vástago horizontal a la posición 1
Y5 Válvula solenoide Permite la salida del cilindro C a la posición C2
Y6 Válvula solenoide Permite el retorno del cilindro C a la posición C1
Y7 Válvula solenoide Elevar el actuador sin vástago vertical
Y8 Válvula solenoide Desciende el actuador sin vástago vertical
KM1 Relé Permite el paso de corriente al motor
HMI Panel de control Permite visualizar el proceso (Ethernet)
Total 10 salidas digitales
Fuente: Autores. Según lo mostrado en la tabla 15 son necesarias 74 entradas y 10 salidas digitales es por esto por lo que se requieren 3 tipos de módulos, un módulo que tenga entradas con la capacidad de leer las señales del encoder y que sean compatibles con el controlador establecido; para este caso se escogió la referencia CPX-2ZE2DA que cuenta con 2 entradas aptas para este fin (detallado en el Anexo 13). Otro módulo de entradas y salidas (I/O) para garantizar un rango de disponibilidad para nuevas implementaciones que se deseen realizar en el futuro; esta vez se selecciona el CPX-8DE-8DA (más información en el Anexo 13) el cual cuenta con 8 entradas y 8 salidas digitales. Finalmente, para completar la totalidad de entradas requeridas es necesario implementar 4 módulos de 16 entradas digitales como el de referencia CPX-16DE (revisar Anexo 13). Todos estos módulos son proporcionados por la empresa Festo.
2.5.2 Control y simulación del sistema. La simulación del parqueadero automatizado se realiza con FluidSIM, un banco neumático virtual proporcionado por la empresa Festo; este programa permite construir un circuito neumático con el que se puede visualizar el funcionamiento de los diferentes elementos usados en la automatización de sistemas electroneumáticos. En la figura 56 se muestra el circuito que representa el sistema de elevación y posicionamiento del parqueadero. Como se puede observar en el circuito diseñado la pinza neumática es representada por dos actuadores neumáticos activados por una válvula 5/3 (Y1, Y2); esta válvula fue escogida debido a que se requiere que todos los actuadores involucrados puedan detenerse en cualquier posición designada por el código de

94
programación. Esta pinza contara con dos sensores de posición P1 y P2 los cuales indicaran cuando esta se encuentra abierta. Y3,Y4,Y7 y Y8 son las válvulas 5/3 encargadas de suministrar el aire a los actuadores neumáticos sin vástago encargados de la elevación y desplazamiento horizontal de la bicicleta; la posición de estos actuadores será determinada por 8 sensores magnéticos implementados sobre la camisa de los cilindros, AH1 y AH2 indican si el cilindro horizontal se encuentra en posición de recepción (Pos1) o si está en posición para la elevación (Pos2); los sensores restantes apoyan a los dos cilindros verticales para determinar en qué piso del parqueadero se encuentran. Y5 y Y6 activan el cilindro auxiliar con el fin de posicionar adecuadamente las bicicletas más pequeñas, este cuenta con un sensor C1 que ayuda al programa a saber en qué posición se encuentra. Por último, se puede apreciar el motor encargado de la rotación del sistema el cual es accionado por el relé KM1. Figura 56. Circuito electroneumático.

95
Fuente: Autores. Para lograr el correcto funcionamiento del circuito presentado, se realiza un programa en el software CoDeSys 2.3 proporcionado por Festo el cual se comunica con FluidSIM por medio del servidor OPC EzOPC; un programa que sirve como puente de comunicación para poder enviar y recibir datos de CoDeSys a FluidSIM y viceversa. Figura 57. Conexión entre FluidSIM y CoDeSys.
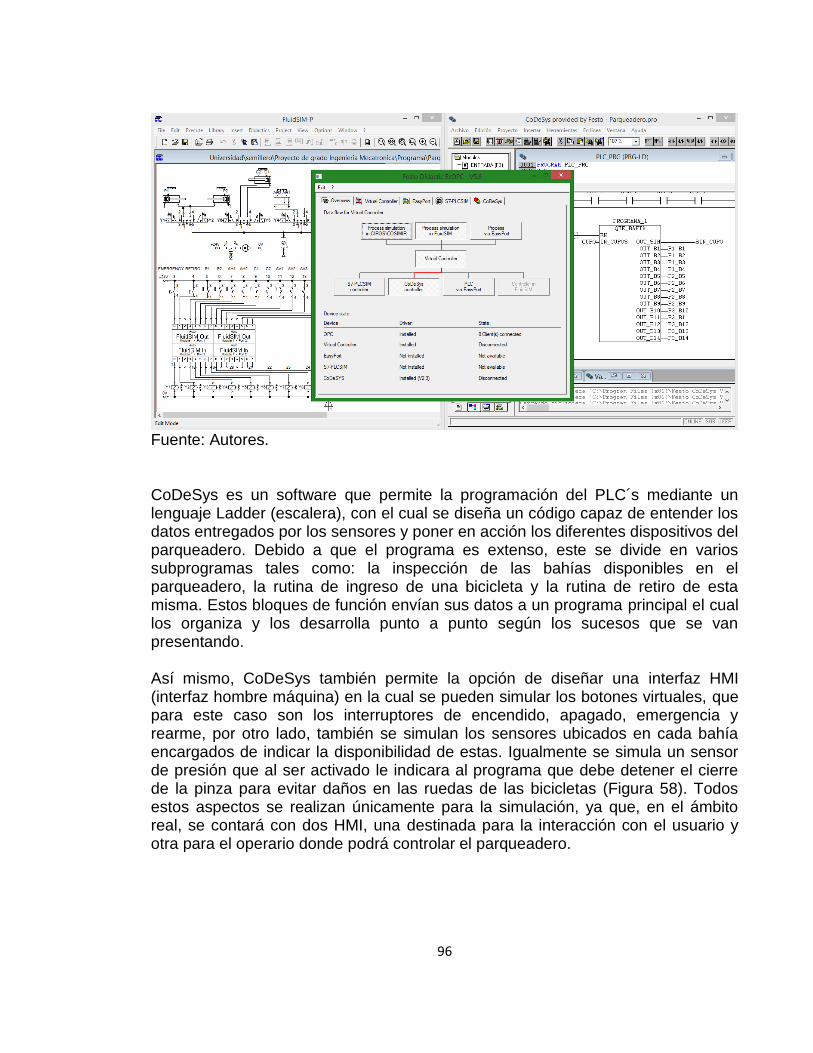
96
Fuente: Autores. CoDeSys es un software que permite la programación del PLC´s mediante un lenguaje Ladder (escalera), con el cual se diseña un código capaz de entender los datos entregados por los sensores y poner en acción los diferentes dispositivos del parqueadero. Debido a que el programa es extenso, este se divide en varios subprogramas tales como: la inspección de las bahías disponibles en el parqueadero, la rutina de ingreso de una bicicleta y la rutina de retiro de esta misma. Estos bloques de función envían sus datos a un programa principal el cual los organiza y los desarrolla punto a punto según los sucesos que se van presentando. Así mismo, CoDeSys también permite la opción de diseñar una interfaz HMI (interfaz hombre máquina) en la cual se pueden simular los botones virtuales, que para este caso son los interruptores de encendido, apagado, emergencia y rearme, por otro lado, también se simulan los sensores ubicados en cada bahía encargados de indicar la disponibilidad de estas. Igualmente se simula un sensor de presión que al ser activado le indicara al programa que debe detener el cierre de la pinza para evitar daños en las ruedas de las bicicletas (Figura 58). Todos estos aspectos se realizan únicamente para la simulación, ya que, en el ámbito real, se contará con dos HMI, una destinada para la interacción con el usuario y otra para el operario donde podrá controlar el parqueadero.
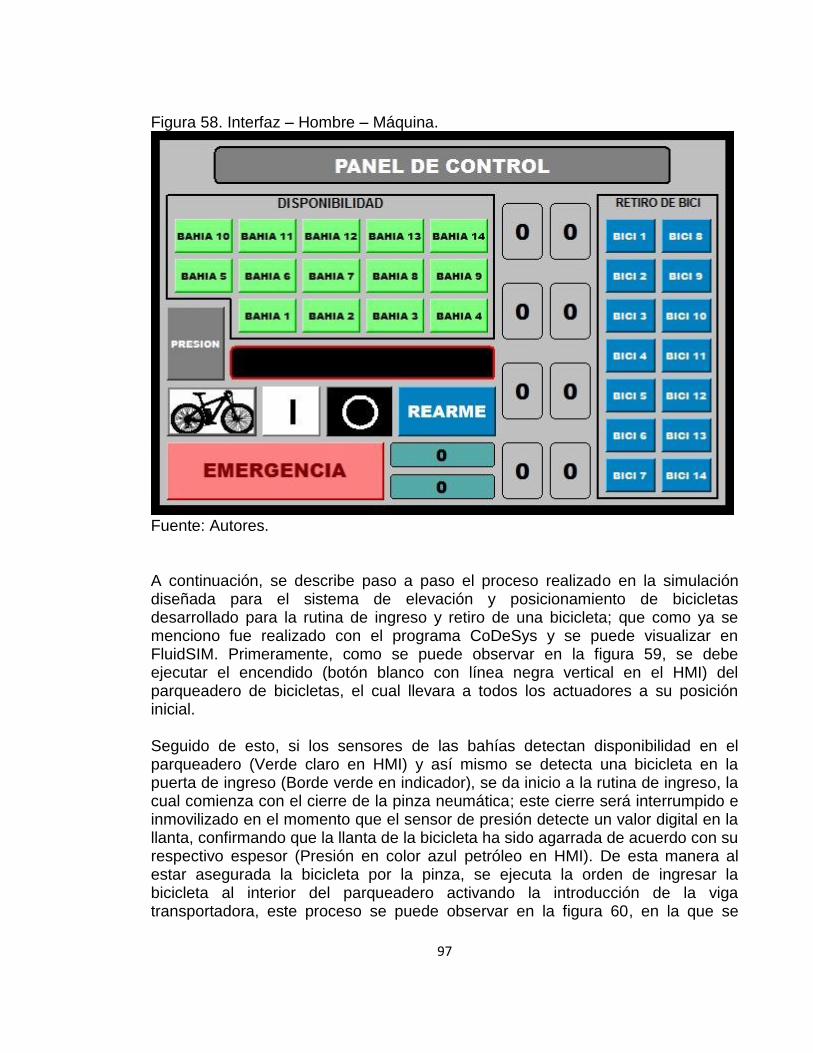
97
Figura 58. Interfaz – Hombre – Máquina.
Fuente: Autores. A continuación, se describe paso a paso el proceso realizado en la simulación diseñada para el sistema de elevación y posicionamiento de bicicletas desarrollado para la rutina de ingreso y retiro de una bicicleta; que como ya se menciono fue realizado con el programa CoDeSys y se puede visualizar en FluidSIM. Primeramente, como se puede observar en la figura 59, se debe ejecutar el encendido (botón blanco con línea negra vertical en el HMI) del parqueadero de bicicletas, el cual llevara a todos los actuadores a su posición inicial. Seguido de esto, si los sensores de las bahías detectan disponibilidad en el parqueadero (Verde claro en HMI) y así mismo se detecta una bicicleta en la puerta de ingreso (Borde verde en indicador), se da inicio a la rutina de ingreso, la cual comienza con el cierre de la pinza neumática; este cierre será interrumpido e inmovilizado en el momento que el sensor de presión detecte un valor digital en la llanta, confirmando que la llanta de la bicicleta ha sido agarrada de acuerdo con su respectivo espesor (Presión en color azul petróleo en HMI). De esta manera al estar asegurada la bicicleta por la pinza, se ejecuta la orden de ingresar la bicicleta al interior del parqueadero activando la introducción de la viga transportadora, este proceso se puede observar en la figura 60, en la que se

98
puede apreciar el parqueo de una bicicleta en la bahía número 7 (Ejemplo explicativo para todo el proceso). Figura 59. Posición inicial del sistema de elevación y posicionamiento.
Fuente: Autores. Figura 60. Ingreso de la viga transportadora con la llanta sujetada.
Fuente: Autores. Ya estando la viga transportadora junto con la bicicleta completamente introducidas en el parqueadero, el programa revisa en que bahía se ubicará la cicla, primeramente, se detecta en cuál de los tres pisos se encuentra la bahía disponible. Si el sistema detecta que la ubicación de parqueo se encuentra en los

99
dos pisos superiores, se accionan los actuadores neumáticos verticales que serán interrumpidos e inmovilizados por la señal del sensor que indicará cuando estos ya se encuentren en el segundo piso o en el tercero de ser el caso (Para el ejemplo de la bahía 7 se requiere llegar hasta el segundo nivel). En el momento en que los elevadores estén en la posición correcta de parqueo según el piso que corresponda, se activa el motorreductor dando inicio al giro del sistema (Figura 61). Figura 61. Elevadores posicionados y arranque del motorreductor.
Fuente: Autores. Figura 62. Paro del motor y activación de actuadores horizontales.
Fuente: Autores.

100
Al momento en que el motor empieza su recorrido, se inicia también un conteo de pulsos que indica la bahía por la que el sistema está pasando, es decir, si el programa detecta un solo pulso quiere decir que el parqueadero se encuentra situado en la bahía 1, si recibe 4 pulsos indica que está ubicado en la bahía 4 y así mismo sucede con los pisos superiores, siendo un pulso bahía 6 o 11 y siendo 4 pulsos bahía 9 o 14. Estos pulsos serán recibidos cada 2 segundos en la simulación, ya que este tren de pulsos desarrollado está diseñado con el fin de simular el encoder magnético que tendrá el motor en el parqueadero real. Así mismo el conteo de estos pulsos lo llevaran varios contadores asignados en el programa, como también un temporizador será el encargado de contabilizar los dos segundos entre pulso y pulso. Por otro lado, se implementaron otros 4 contadores y un temporizador más, los cuales están encargados de contar los pulsos restantes por los que el motor debe pasar para poder llegar nuevamente a la puerta de ingreso del parqueadero, proceso que se menciona más adelante; estos contadores y temporizadores se pueden apreciar en el HMI debajo del botón de rearme y al lado izquierdo de los botones indicadores de retiro de bicicleta (Botones de color azul). Ya mencionado el proceso de accionamiento y lectura de posición del motor, al llegar este a la posición donde se encuentra la bahía disponible (para el ejemplo de la bahía 7 es la posición en la que se han contado 2 pulsos) es detenido y al mismo tiempo se acciona la salida de la viga transportadora. Al llegar la viga al final de su recorrido y si el sensor detecta que la bicicleta no ha llegado al punto adecuado de parqueo en la bahía, se procede a activar el cilindro neumático con vástago, con el fin de garantizar que las bicicletas de menor tamaño sean estacionadas adecuadamente. Todo el proceso indicado se puede visualizar en la figura 62. Figura 63. Liberación de cicla e inicio de retorno a posición inicial.

101
Fuente: Autores. En el momento en el que el sensor de la viga detecta que la bicicleta ya se encuentra ubicada de manera correcta, se activa la apertura de la pinza neumática, liberando la bicicleta sobre la bahía, así mismo se da inicio a la rutina de posición inicial activando el retorno de los dos actuadores horizontales (Figura 63) al interior del parqueadero, al llegar a la posición deseada y dependiendo de la ubicación de los actuadores elevadores, se procede a activar el descenso de estos para los casos en los que se encuentran en los pisos superiores. Ya estando los cuatro actuadores en la posición adecuada; los horizontales en el interior y los elevadores en el primer nivel, se activa el motor que rotara el sistema hasta llevarlo a la posición donde se encuentra la puerta de ingreso, este proceso se logra de la misma manera que se detecta la bahía disponible mencionada anteriormente, contando los pulsos restantes que falten para llegar a 5 (Conteo y tiempo mostrados en el temporizador y en los contadores secundarios de la HMI) en el conteo realizado al ingreso (Figura 64). Figura 64. Retorno del sistema a posición inicial.

102
Fuente: Autores. Finalmente, cuando el sistema se encuentre ubicado hacia la puerta de ingreso, se acciona la viga transportadora en recorrido hacia la puerta del exterior, quedando de nuevo en posición inicial como en la figura 59. Por otro lado, el proceso de retiro de bicicleta se hace muy similar que el proceso de ingreso, con la diferencia que esta rutina comienza, cuando no se detecta bicicleta en la entrada del parqueadero y es oprimido uno de los botones indicadores de posición de bahía (Botones de color azul), así mismo el proceso solo se lleva a cabo si y solo si el botón oprimido corresponde a una bahía que se encuentra ocupada por una bicicleta en su interior, es decir, siguiendo con el ejemplo de la bahía 7, ya que esta se encuentra ocupada por una cicla, se procede a oprimir el botón con el texto “BICI 7” para dar inicio a su retiro del parqueadero. De este modo el programa comienza introduciendo la viga transportadora al interior de la bahía, sin ejecutar el cierre de la pinza (Figura 65), como en el caso de la rutina de ingreso. Figura 65. Inicio del proceso de retiro de la bicicleta.

103
Fuente: Autores. Cuando la viga transportadora se encuentre totalmente ubicada en el interior del parqueadero, se repite el mismo procedimiento realizado en la rutina de ingreso hasta el punto en los dos actuadores horizontales salen a la viga ya ubicada para poder tomar la bicicleta, esta acción se detiene cuando el sensor detecte que la pinza ya se encuentra ubicada en la llanta de la bicicleta, activándose así el cierre de la pinza, hasta que este sea interrumpido por el sensor de presión (Figura 66). Seguido de esto, se activan los actuadores neumáticos para su retorno hacia el interior del parqueadero, de esta manera se inicia la rutina de regreso a posición inicial, la cual es similar a la del proceso de ingreso, con la única diferencia, de que al final del recorrido, cuando ya el motor se encuentre ubicado en dirección a la puerta de ingreso, los elevadores se encuentren posicionados en el primer nivel y cuando la viga transportadora este situada en la puerta de ingreso, se ejecuta la acción de abrir la pinza neumática para de esta manera liberar la bicicleta retirada (Figura 67). El diagrama de flujo del programa detallado en esta sección se puede visualizar en el anexo15. Figura 66. Agarre de la bicicleta en la viga de parqueo.

104
Fuente: Autores. Figura 67. Posición inicial luego del retiro de la bicicleta.
Fuente: Autores.
2.5.3 Animación del parqueadero. En Beneficio de los CADs que brindan las empresas mencionadas en el proyecto, proveedoras de los diferentes dispositivos y así mismo diseñando el modelo en 3D de algunas partes de la estructura con el programa Autodesk Inventor, se desarrolla un video en el que se muestra el funcionamiento del sistema interno del parqueadero, con el fin de pasar de lo teórico a un acercamiento a la realidad.

105
Para este proceso se realiza la estructura total de todo el parqueadero en base de las medidas mostradas en la figura 34 y así mismo en las dimensiones que constituyen a la bahía de parqueo, la viga de refuerzo y la plataforma giratoria; en el anexo 16 se puede apreciar el plano explosionado del ensamble total del sistema de elevación y posicionamiento de bicicletas. A continuación, se muestran algunas capturas en las que se evidencia dicha animación: Figura 68. Ingreso al sistema.
Fuente: Autores. Figura 69. Elevación de la bicicleta.

106
Fuente: Autores. Figura 70. Parqueadero visto desde afuera.

107
Fuente: Autores. Figura 71. Arquitectura de las bahías de parqueo.
Fuente: Autores.
CONCLUSIONES
108
- A través de una investigación detallada en los diferentes modelos de
bicicletas se observa que la evolución de estas ha ido avanzando tecnológicamente y por ello ahora es fácil observar ciclas accionadas eléctricamente, que cuentan con una variedad de dispositivos que las hacen más pesadas, lo que impide el parqueo adecuado de estas en los estacionamientos convencionales.
- Se diseña un parqueadero automatizado con un sistema electroneumático que brinda velocidad, precisión para un correcto posicionamiento, de fácil control y capaz de estacionar bicicletas de hasta 55 Kg, con longitudes de hasta 1,9 m y con llantas de diferentes espesores, hasta de 12 cm.
- Se implementan vigas con buena resistencia para enfrentar los diferentes
esfuerzos y movimientos presentados dentro del estacionamiento, con un ciclo de vida bastante prolongado.
- Con la finalidad de brindar seguridad a las bicicletas se diseña un sistema
de rotación con el tiempo adecuado para evitar desestabilizar dichos vehículos durante el funcionamiento del parqueadero.
- Se puso en práctica los conocimientos adquiridos durante el periodo
educativo, en áreas como dibujo asistido por computador, mecánica aplicada a mecanismos, resistencia de materiales y automatización industrial.
- Mediante la validación por elementos finitos se puede observar la veracidad
en los cálculos mecánicos obtenidos, en los que se evidenciar que la estructura fácilmente puede soportar los esfuerzos máximos presentados.
- Con las facilidades de los programas brindados por Festo, se realiza una
simulación controlada por un programa capaz de identificar y posicionar una bicicleta en la bahía adecuada, para luego entregarla a su respectivo usuario de manera segura.
- Se desarrolla una visualización animada de todo el parqueadero, en la que
se puede observar el funcionamiento de cada una de las partes del sistema de elevación y posicionamiento.

109
RECOMENDACIONES
- Para una futura fase se recomienda implementar sistemas de reconocimiento de imágenes para una mejoría en la detección de los diferentes modelos de bicicletas, adecuando de esta manera el sistema de control frente a cada modelo.
- Con el fin de brindarle comodidad al usuario y mayor seguridad en sus
implementos, se aconseja implementarle al sistema la opción de poder guardar los implementos de ciclismo junto con la bicicleta.
- Se recomienda anexar un sistema de tarjetas personalizadas y a su vez un
sensor “IC Tag” con el fin de vincular el usuario a la base de datos del parqueadero y así brindar más seguridad al momento del retiro de las bicicletas.
- Realizar los cálculos mecánicos debidos a la bahía de parqueo, ya que en
esta fase solo fue propuesta y validada mediante elementos finitos.

110
REFERENCIAS
[1] P. E. Acosta Otálora y L. M. León Ceballos, «SIMULACIÓN EN UN ENTORNO VIRTUAL DE UN
ESTACIONAMIENTO DE BICICLETAS EN LA UNIVERSIDAD PILOTO DE COLOMBIA,» Bogotá D.C., 2016.
[2] Semana, «Más de 835.000 bogotanos prefieren la bicicleta para movilizarse,» 22 Junio 2018. [En línea].
Available: https://www.semana.com/nacion/articulo/cuantas-personas-montan-bicicleta-en-
bogota/572660. [Último acceso: 10 Septiembre 2018].
[3] Caracol Radio, «Este año Bogotá tendría sistema de registro único de bicicletas,» 27 Abrol 2018. [En
línea]. Available: http://caracol.com.co/emisora/2018/04/27/bogota/1524854538_996330.html.
[Último acceso: 10 Septiembre 2018].
[4] Instituto Distrital De Recreación Y Deporte, «Instituto Distrital De Recreación Y Deporte,» [En línea].
Available: https://www.idrd.gov.co/ciclovia-bogotana. [Último acceso: 10 eptiembre 2018].
[5] El Espectador, «El Espectador,» 6 Agosto 2018. [En línea]. Available:
https://www.elespectador.com/noticias/bogota/bogota-ya-cuenta-con-500-kilometros-de-ciclorruta-
articulo-804642. [Último acceso: 10 Septiembre 2018].
[6] TRANSMILENIO S.A, «Transmilenio,» 24 Mayo 2018. [En línea]. Available:
http://www.transmilenio.gov.co/Publicaciones/nuestro_sistema/otros_servicios/Cicloparqueaderos.
[Último acceso: 11 Septiembre 2018].
[7] El Espectador, «El Espectador,» 10 Septiembre 2018. [En línea]. Available:
https://www.elespectador.com/noticias/bogota/concejo-impulsa-proyecto-de-ley-para-crear-
mecanismo-de-participacion-de-biciusuarios-articulo-811424. [Último acceso: 11 Septiembre 2018].
[8] Instituto Distrital de Recreación y Deporte, «IDRD,» 2014. [En línea]. Available:
http://www.idrd.gov.co/sitio/idrd/?q=node/1606. [Último acceso: 24 Julio 2016].
[9] M. Apolinar, «Las modalidades más frecuentes de robo de bicicletas en Bogotá,» 28 Agosto 2015. [En
línea]. Available: http://www.eltiempo.com/bogota/robo-de-bicicletas-en-bogota/16263615. [Último
acceso: 24 Julio 2016].
[10] G. Lara, «Motorpasión,» 10 Diciembre 2012. [En línea]. Available:
https://www.motorpasion.com/coches-hibridos-alternativos/que-es-una-bicicleta-electrica. [Último
acceso: 11 Septiembre 2018].
[11] J. L. Ramírez, «La bicikleta,» Septiembre 2016. [En línea]. Available: https://labicikleta.com/las-
bicicletas-electricas/. [Último acceso: 11 Septiembre 2018].
[12] J. Herrera Quiroz, «Control Industrial Hacia un concepto moderno de la Automatización Industrial,»
GRUPO EDITORIAL EMB, Marzo 2004. [En línea]. Available:
111
http://www.emb.cl/electroindustria/articulo.mvc?xid=81. [Último acceso: 24 julio 2016].
[13] I. «Definición sencilla de la automatización eléctrica y sus efectos,» 16 Agosto 2011. [En línea].
Available: http://isbelg.over-blog.com/article-definicion-sencilla-automatizacion-electrica-efectos-
86799569.html. [Último acceso: 24 Julio 2016].
[14] A. B. Salazar Izaguirre, A. García, C. Bahena Franco, H. Sánchez Ávila y J. P. Ramírez Vega,
«Automatización,» 6 Septiembre 2003. [En línea]. Available:
http://sifunpro.tripod.com/automatizacion.htm. [Último acceso: 24 Julio 2016].
[15] F. «electroneumatica,» 28 Abril 2011. [En línea]. Available:
http://electroneumatic.blogspot.com.co/2011/04/electroneumatica-basica.html. [Último acceso: 24
Julio 2016].
[16] A. Y. Ibañez villalba, «ELECTRONEUMATICA,» 3 Septiembre 2013. [En línea]. Available:
https://prezi.com/qre2xm1k89mx/electroneumatica/. [Último acceso: 25 Julio 2016].
[17] P. Prieto, «MONOGRAFICO: Lenguajes de programación - Principios básicos de PLC,» 8 Octubre 2007.
[En línea]. Available:
http://recursostic.educacion.es/observatorio/web/gl/component/content/article/502-monografico-
lenguajes-de-programacion?start=2. [Último acceso: 25 Julio 2016].
[18] JOUCOMATIC, «EMERSON,» 2007. [En línea]. Available:
http://www.asconumatics.eu/images/site/upload/_es/pdf1/00351es.pdf. [Último acceso: 12
Septiembre 2018].
[19] Ecocycle, «ecocycle,» Febrero 2013. [En línea]. Available: http://www.ecocycle.co.uk/models/. [Último
acceso: 30 Julio 2016].
[20] JFE Engineering Corporation, «jfe-eng,» febrero 2013. [En línea]. [Último acceso: 24 Julio 2016].
[21] D. Sanchez Mejia, «Tecnológicos parqueaderos llegan a Medellín,» 5 Abril 2015. [En línea]. Available:
http://www.eltiempo.com/colombia/medellin/parqueaderos-con-tecnologia-en-medellin/15514478.
[Último acceso: 24 Julio 2016].
[22] J. A. Cárdenas A., «El primer parqueadero robot de Bogotá,» 23 Julio 2016. [En línea]. Available:
http://www.elespectador.com/vivir/autos/el-primer-parqueadero-robot-de-bogota-articulo-644852.
[Último acceso: 24 Julio 2016].
[23] PARKING EXPERTS, «ELEVADORES DE PARQUEO - MULTIPARKING,» 22 Julio 2015. [En línea]. Available:
http://www.parkingexperts.com.co/#!multiparking-parking-experts/cfvg. [Último acceso: 24 Julio
2016].
[24] Multiparking, «D450 Plataforma giratoria,» 2009. [En línea]. Available:
112
http://www.multiparking.es/////index.php?Turntable-D450. [Último acceso: 25 Julio 2016].
[25] PERFECT PARKING INTERNATIONAL, «SISTEMAS DE ESTACIONAMIENTOS VERTICALES - OPTIMIZACIÓN
DE ESPACIOS,» 2012. [En línea]. Available: http://www.orion-peru.com/perfectparking/Two-Post-
Parking-2-floor-mini.html#. [Último acceso: 25 Julio 2016].
[26] JFE Engineering Corporation, 2006. [En línea]. Available: http://www.jfe-
eng.co.jp/en/products/comfortable/multi/mul01.html. [Último acceso: 25 Julio 2016].
[27] Kang Ding, «Sklift,» 2013. [En línea]. Available: http://www.sklift.com/proshow/IpC5.html. [Último
acceso: 1 Agosto 2016].
[28] Qd Telian, «Alibaba,» Qingdao Telian Machinery CO .LTD, 2013. [En línea]. Available:
http://qdtelian.en.alibaba.com/product/1628744683-
220900448/Intelligent_Two_Post_Double_cylinder_Gantry_Hydraulic_Lift.html. [Último acceso: 1
Agosto 2016].
[29] Treasurall, «Treasurall.Alibaba,» Ningbo Chenfan Auto Accesories Co.Ltd, 208. [En línea]. Available:
https://spanish.alibaba.com/product-gs/bike-lift-630255807.html. [Último acceso: 1 Agosto 2016].
[30] L. J. Ocampo y Y. A. Martin, «ENERGIA NEUMATICA,» 22 Octubre 2012. [En línea]. Available:
http://es.slideshare.net/yeka2095/energia-neumatica-14836755. [Último acceso: 24 Julio 2016].
[31] Engineers Edge, «Engineers Edge,» [En línea]. Available:
https://www.engineersedge.com/coeffients_of_friction.htm. [Último acceso: 20 Enero 2018].
[32] FESTO, «FESTO,» Abril 2018. [En línea]. Available: https://www.festo.com/cat/es-
co_co/data/doc_es/PDF/ES/DGC-K_ES.PDF. [Último acceso: 5 Mayo 2018].

113
ANEXOS
ANEXO 1. Plano de la pinza neumática (series PSG).
Fuente: www.omil.it

114
ANEXO 2. Especificaciones de rodachina de la pinza neumática.
Fuente: www.imsa.co

115
ANEXO 3. Ficha técnica del cilindro neumático con vástago.
Fuente: https://www.festo.com/cat/es-co_co/xDKI.asp

116
ANEXO 4. Ficha técnica del actuador neumático sin vástago, horizontal.
Fuente: https://www.festo.com/cat/es-co_co/xDKI.asp
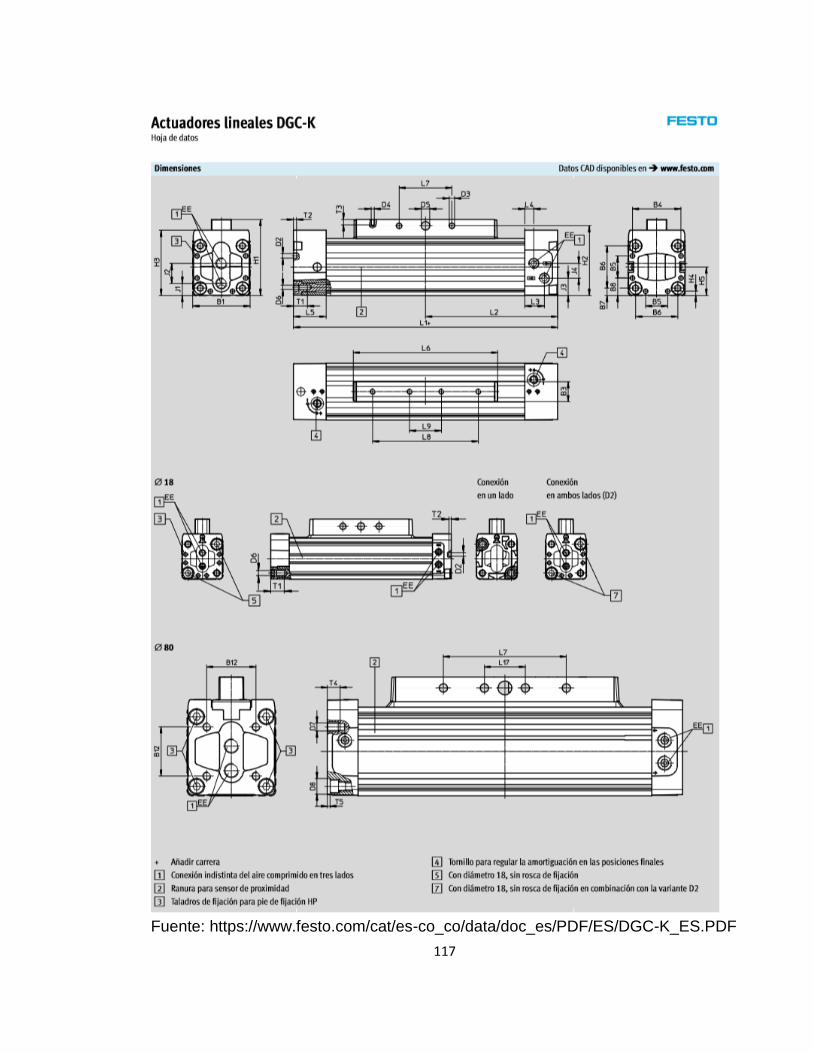
117
Fuente: https://www.festo.com/cat/es-co_co/data/doc_es/PDF/ES/DGC-K_ES.PDF

118
Fuente: https://www.festo.com/cat/es-co_co/data/doc_es/PDF/ES/DGC-K_ES.PDF

119
ANEXO 5. Hoja de datos del actuador neumático sin vástago vertical.
Fuente: https://www.festo.com/cat/es-co_co/xDKI.asp
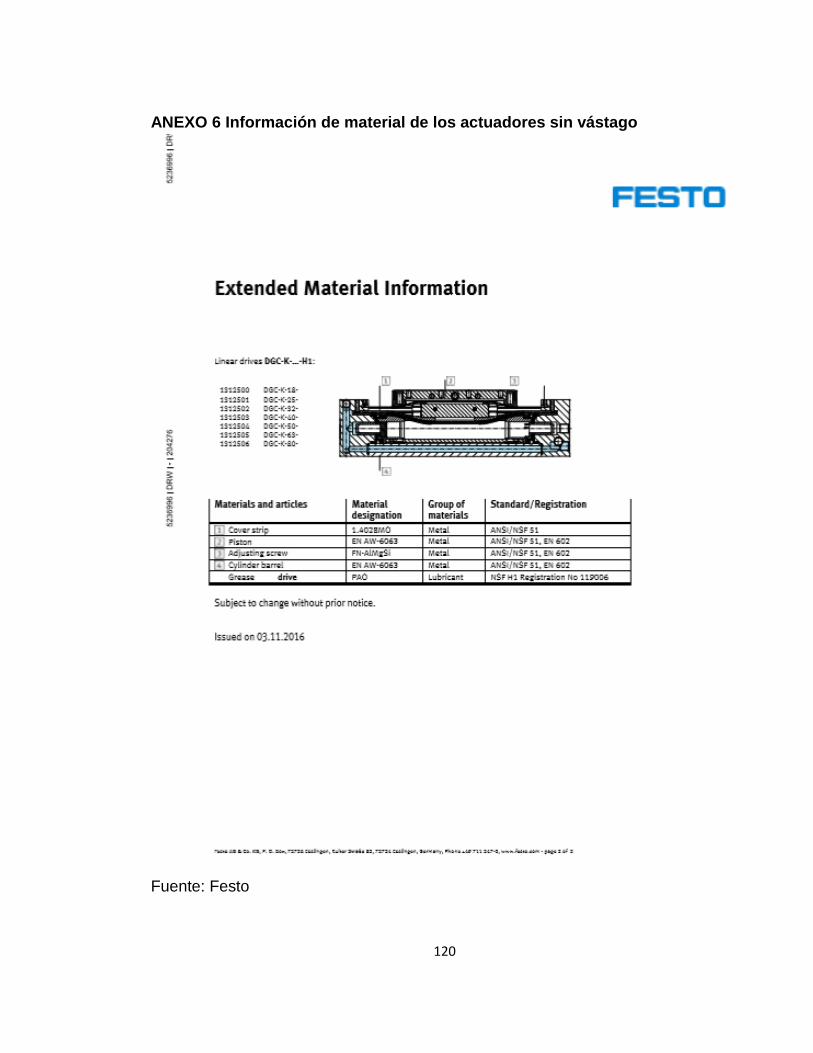
120
ANEXO 6 Información de material de los actuadores sin vástago
Fuente: Festo
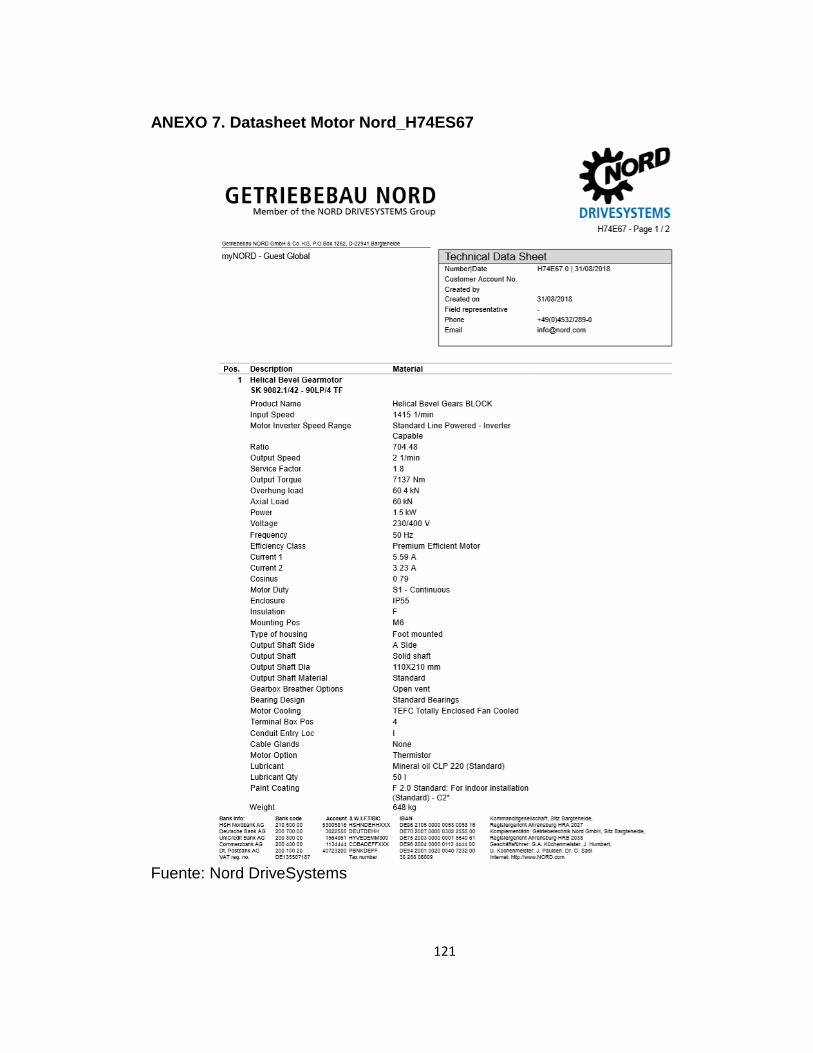
121
ANEXO 7. Datasheet Motor Nord_H74ES67
Fuente: Nord DriveSystems
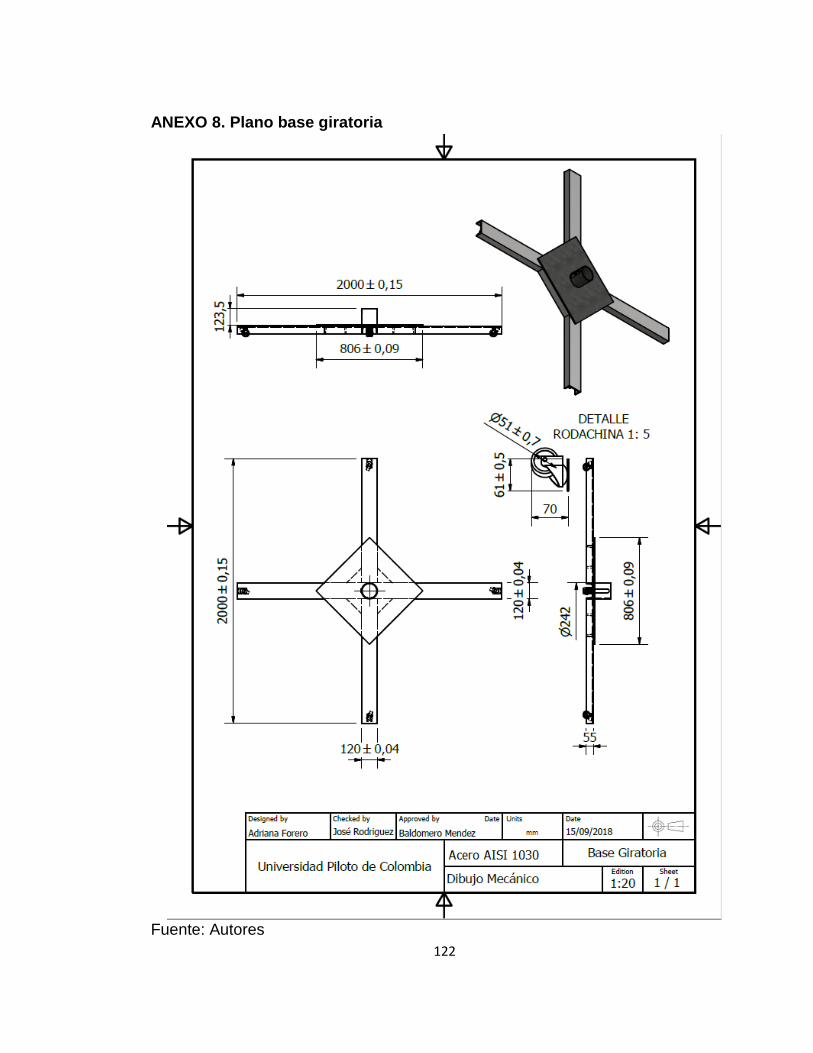
122
ANEXO 8. Plano base giratoria
Fuente: Autores

123
ANEXO 9. Plano dedos para la pinza
Fuente: Autores

124
ANEXO 10. Plano viga de parqueo
Fuente: Autores

125
ANEXO 11. Plano viga de refuerzo
Fuente: Autores

126
ANEXO 12. Hoja de datos del PLC Festo CPX 197330
Fuente: Festo

127
ANEXO 13. Hojas de datos de módulos
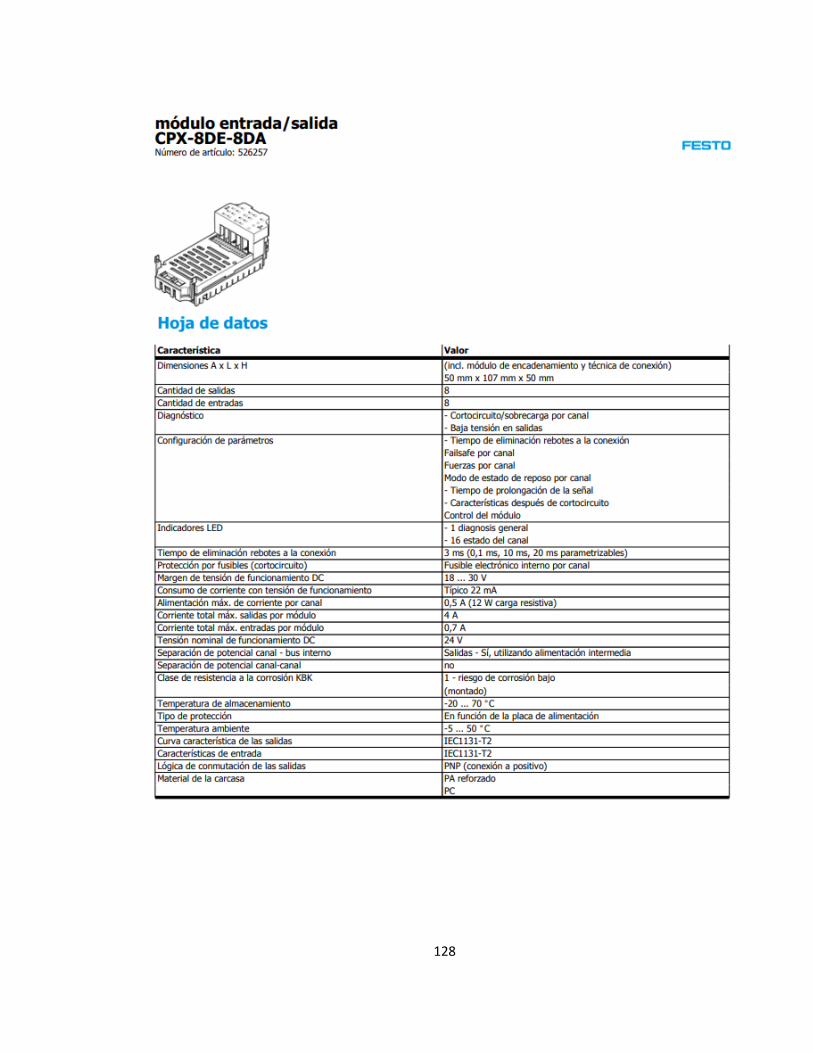
128

129
Fuente: Festo

130
ANEXO 14. Especificaciones de rodachina de la base giratoria.
Fuente: www.imsa.co

131
ANEXO 15. Diagramas de flujo de Ingreso y retiro de una bicicleta. Ingreso.

132
Salida.
Fuente: Autores.

133
ANEXO 16. Plano ensamble total del sistema de elevación y posicionamiento.
Fuente: Autores.