automatic vehicle detection using various object …1.4 image processing with mathcad and matlab....
TRANSCRIPT

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
16 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Automatic Vehicle Detection Using Various Object Detecting Algorithm and
Thresholding Methods
Aarti Sharma,
M. Tech Scholar (CSE), ECB
Rajasthan (India)
Abstract:-The digital image processing deals with developing a digital system to performs experiments and operations on a digital image with
the use of computer algorithms. An image is nothing more than a 2D mathematical function f(x,y) where x and y are two horizontally and
vertically co-ordinates. Object recognition is one of the most important applications of image processing.
Vehicle detection from a satellite image or aerial image is one of the most interesting and challenging research topics from past few years.
Vehicle detection from satellite image is one of the applications of object detection. The traffic and crowd is increasing everyday in all over the
world. Satellites images are normally used for weather forecasting and geographical applications. So, Satellites images may be also good for the
detecting traffic using Image processing. This thesis used simple morphological recognition method for vehicle detection using image processing
technique in Matlab which is best method for detection of cars, trucks and buses. We can easily compute the total numbers of vehicles in the
desired area in the satellite image and vehicles are shown under the bounding box as a tiny spots. Here we compare two algorithms like pixel
thresholding and Otsu thresholding method. According to our result Pixel level thresholding is better than Otsu method.
Keywords:- Vehicles at surface, object detection algorithm, thresholding values, airel images.
__________________________________________________*****_________________________________________________
1. Introduction
1.1 Introduction of Image processing
In world of computer science Image processing is a quickly
growing area. Its growth has filled by technological advances in,
computer processors, digital imaging and mass storage devices.
Analog imaging is over taking by digital systems, for their
affordability & flexibility. Most seen examples in daily routine, are
medicines, video production remote sensing, photography, film and
security monitoring. Huge volumes of digital images data every
day produced by these and other sources, it’s too huge that, we
cannot check it manually [1].
1.2 Digital images
An image may be defined as a two-dimensional function, f(x, y),
where x and y are spatial (plane) coordinates, and the amplitude of
at any pair of coordinates (x, y) is called the intensity or gray level
of the image at that point. When x, y, and the amplitude values of f
are all finite, discrete quantities, we call the image a digital image.
The field of digital image processing refers to processing digital
images by means of a digital computer. Note that a digital image is
composed of a finite number of elements, each of which has a
particular location and value. These elements are referred to as
picture elements, image elements, pels, and pixels. Pixel is the term
most widely used to denote the elements of a digital image [2].
Three types of passive image sensing technologies are given
below, which have been made for target detection.
(1)Image Processing: Video Camera
Nowadays using video cameras to collect data for recognition
studies can be achieved at a lower cost compared to other image
sensing techniques [Nooralahiyan et al., 1997]. On the other hand,
the use of video camera images is not suitable under certain
monitoring conditions, for example during the night or foggy
conditions [Koch et al., 2006; Cheng et al., 2005]; which may
imply the unsuitability of them for the current research.
(2)Image Processing: Satellite
Satellite image detection is suitable when surveillance of a wide
area is required although the installation & maintenance costs may
be high [Roper, 2005]. The other disadvantages are the inability to
monitor & the low ground resolution on a cloudy day.
1.2.1Advantages with digital imaging
Benefits of digital image processing: low cost processing,
consistently high quality of the image, & the ability to manipulate
all aspects of the process. As long as computer processing speed
was increasing, cost of storage memory started dropping, this field
started growing [6].
There are various benefits with digital cameras compared to other
means of acquiring data. Main purposes were to make large spatial
resolution of CCD cameras. A resolution of 3120 X 2068 pixels
allows for a rather large span in the size of the features detected by
the cameras. This is very crucial for reliable fractal analysis of
scaling relations. The pixels size 9X 9m is of the same order as the
grain size in photographic films. The main advantages of the CCD
cameras are making it superior quality to video cam-recorders or
ordinary cameras.
1.3 Image Processing Techniques
This portion handles acquisition, processing & formation of
images. It is shown the best way in diagram where the processes
involved & evolution of the considered information (images).

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
17 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Figure 1: Image processing technique [7]
1.4 Image processing with MathCAD and MatLab.
The MathCAD & MatLab environments are perfectly suited to
image processing. Particularly, MatLab's matrix-oriented language
is perfectly suited for manipulating images, which are not more
than visual renderings of matrices. The result is a very easy &
economical way of expressing image processing operations. In
addition both programs have Image Processing Toolboxes which
provide a flexible & powerful environment for image analysis &
processing. Both programs were used to perform different
calculations on images [8].
There are various benefits of using MatLab & MathCAD for image
analysis. One is the ability to have directed access to any portion of
available information what in general is not possible with many
commercial image analysis systems. We can stop any calculation
anytime with the help of this program, change a portion of the
calculation procedure and then restart the calculations from the
point which was affected by the changes without recompiling the
code as it usually happens with programming in C, or even
restarting the calculations from the starting. New techniques are
developed and also these types of abilities are very helpful in
researches. Main disadvantage of this programs is the relatively
slow computational speed compared to compiled C code. It is
because of the need of the code to be translated first into a machine
code and only then to be executed. Therefore, complex image
processing applications can be better implemented by the use of
high level programming languages as C or C++, rather than using
the softwares like MathCAD or MatLab.
2. Literature survey
This survey included various types of images, image segmentation,
threshold techniques and previous work for detecting the vehicles.
A literature survey has been conducted in order to understand the
current and past research trends in the area of automated moving
vehicle recognition systems. And this chapter discuss about the
previous work for detecting the vehicles using pixel level and Otsu
thresholding techniques.
2.1 Previous work
Semantic analysis of changes in satellite imagery requires the
detection of changes as a first step. Change detection is a well
studied problem in computer vision and many modern change
detection algorithms exist. The most notable of these rely on a
technique called background modeling. In this approach, a number
of images of the scene are used to learn what the normal
background appearance of the scene should look like so that given
a new image, the pixels with abnormal appearance can be detected
as changes [22].
Most of the literature addresses 2-d background modeling problem
in which the images of the scene can be registered to a common 2-
d frame. This is trivially the case with stationary cameras or is
possible through various registration techniques. Early attempts at
2-d background modeling [25, 26, and 27] use a single Gaussian
density at each pixel to model background intensity plus
acquisition noise. These densities are updated with simple adaptive
filters as new observations of the pixel are made. In this approach,
the single Gaussian cannot model the pixel variation present in
many real world scenes such as frequently occluded surfaces
(roads), slow moving objects, and vegetation blowing in the wind.
Stauffer and Grimson [28] proposed the first fully general
algorithm to model a more realistic dynamic background. They
used a mixture of Gaussians [29] density at each pixel which is a
widely used and well studied distribution for modeling multi-
modal data. Because of its fast and robust performance on all types
of realistic scenes, the Stauffer-Grimson algorithm has become the
standard technique for change detection.
In the case of non-stationary cameras, the registration step required
for 2-d background modeling works reasonably well only if the
camera motion is mostly limited to pan/tilt or the scene is mostly
planar. This is because the image registration techniques rely on
global image transformations such as homographies, or polynomial
warping for satellite imagery. The latter allows for more distortion
of the image but is still a global transformation and cannot do local
alignments of objects with 3-d relief between images, which is the
case for satellite imagery. These limitations call for a 3-d solution
to the problem.
3-d change detection is a relatively less researched field in
computer vision. Earlier approaches [30,31] used manually
constructed 3-d site models to make correspondences between
images so that change detection algorithm can be applied. The
overhead of constructing 3-d geometry is infeasible for this kind of
approach to be used in modern applications. Heller et al. [32] use
stereo pairs of satellite images to reconstruct 3-d geometry of the
scene and then compare reconstructed geometry from different
pairs of images to detect 3-d changes to the scene. This algorithm
is more applicable but it depends on having stereo pairs and it
cannot detect appearance changes on the surfaces of the scene such
as moving vehicles and shadows. Recently, a new approach that
combines the power of Stauffer-Grimson style appearance
modeling with automated 3-d geometry discovery has been
proposed [32]. This volumetric appearance modeling (VAM)
approach is suitable for change detection from satellite imagery for
several reasons. First, it is not assumed that there is a fixed set of

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
18 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
images available at the beginning and the model of the world is
built up incrementally as images are observed in an unbounded
sequence. This type of processing is called an on-line algorithm in
computer science terminology. This makes it possible to discard
each image after processing and reduces storage requirements
significantly making the method applicable to satellite domain
where image sizes are on the order of GBytes. Second, VAM
makes no assumptions about frame-to-frame continuity. Third,
even though a camera model, namely a cubic rational polynomial
camera [33] for the case of satellite imagery, is supplied with each
image to be processed, in general it is necessary to calibrate and
register such projection models due to errors in platform motion
and internal parameters. These adjustments are outside the scope of
this paper and in this work it is assumed that the cameras are
correct.
However, the VAM framework is capable of supporting automated
camera calibration and registration [34]. Finally, it has been shown
[35] that the framework tolerates the amount of variability in
viewpoint, lighting, and atmospheric conditions such as haze that is
typically observed in satellite imagery.
2.2 Related Work for Object Recognition
Semantic analysis of changes in satellite imagery requires the
classification of change regions as the second step. The objects of
interest in this analysis are vehicles. But the classification
technique used is general and applies to several object categories
such as buildings, roads, bridges, etc. which could also be objects
of interest in satellite imagery [24]. From a probabilistic point of
view, being on a changing surface in the scene, and being on an
object surface are independent events for a pixel in an image.
Hence the output map of a change classification algorithm can
simply be computed as the product of the change map as given by
the Voxel World and the classification map as given by a
conventional classification algorithm. However the classification
module can proceed in a completely independent manner as well
and the algorithm used is in the realm of the classical classification
algorithms.
Object recognition is the problem of declaring existence of an
instance from an object class in a given image patch. The input
image may be larger and contain many instances of the class as in
the case of satellite imagery. However the algorithms usually
convolve the input image with the classification module which
boils down to the classification of a patch in the image that is of the
extent of the object instance. Thus, the classification module
explicitly achieves position invariance during recognition. By
carrying out processing at multiple scales, it is also possible to
achieve scale invariance. In the following discussion, the object
image will refer to the image patch that contains the whole extent
of the object as seen in the image and the image domain will refer
to this patch and not the whole input image.
2.3 Related work on Road Vehicle Recognition
This section describes research on road vehicles rather than
military ones. In general, research on road vehicle recognition is
performed for traffic management or automated driver assistance
system.
(a) [Sampan, 1997] A PhD thesis was published for traffic
monitoring by using a circular array, consisting of 152
microphones, but 143 of them were of interest. After the data were
pre-processed to only maintain the components between 2700Hz
and 5400Hz, the 30-dimension feature vectors were extracted from
the energy over each 0.2 seconds in the time domain. PCA was
processed to reduce the dimension to 24 before performing
classification with either kNN, Multilayer Perceptron (MLP) or
Adaptive Fuzzy Logic System (AFLS). Although the exact number
of vehicles in each class was not clear, it was stated that they
varied between each class; and there were data of 1327 vehicles in
total. Problems caused by this inequality of the sizes of training
sets was addressed in the thesis by considering the effect on the
training as well as introducing the learning factor, a method
intended to take care of the issue. Moreover, it attempted to deal
with the inequality derived from the fact some classes are easier to
be learned than others by allocating misclassification costs for each
pattern although there was no logical explanation regarding how
they were determined. The obtained classification accuracies were
97.95%, 92.24% and 78.67% for 2-class, 4- class, and 5-class
experiments respectively. Althugh the use of such a large number
of microphones may not be appropriate for developing a cost
effective and compact recognition system, this study played a good
role in initiating research on acoustic road vehicle recognition with
fairly accurate results.
(b) [Nooralahiyan et al., 1997, 1998] Researchers at the
University of Leeds published two similar papers on their acoustic
road vehicle classification studies for traffic monitoring in the late
1990s. The focus was on classification only thus detection
algorithms were not included. The study was motivated by the
progress in automated speech recognition research that apparently
let them believe feasibility of the short term spectrum, particularly
at low frequencies, for the task. Therefore, the resultant algorithm
choice was made heuristically but with influence of speech
recognition studies. In the first paper [Nooralahiyan et al., 1997],
they first conducted a feasibility study using acoustic signals of
four vehicles; such as a small saloon, a medium saloon, a
motorcycles, and a light goods vehicle. All of the recordings were
collected under relatively controlled conditions, particularly in
terms of the level of background noise and vehicle speed. At this
stage, the feature extraction methods used were: FFT and
autocorrelation method Linear Predictive Coding (LPC) both in
MATLAB, and also software for computational modelling of
hearing, which was developed by Patterson et al. [Patterson et al.,
1995]. For the latter, Equivalent Rectangular Bandwidth (ERB)
based gammatone filterbanks, covering between 100Hz and
12kHz, were used to simulate the movement of the basilar
membrane in the cochlea. Moreover, the same software platform
was also used to simulate auditory nerve activity patterns of the
cochlea’s inner hair cells. Within these methods, FFT was omitted
after the initial stage because its classification outcome was not
satisfactory. An unsupervised Kohonen Self-Organising Map
(SOM) was used for this first phase of the study.
They then carried out another set of experiments using signals
collected at various urban road sites where they had little control
compared with the first stage [Nooralahiyan et al., 1998]. In total,
over 200 recordings of various vehicles travelling at different

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
19 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
speed of no faster than 40 miles per hour (i.e. approximately 64 km
per hour), collected at more than 20 sites were utilised. The
collected feature vectors were classified by the supervised Time
Delay Neural Network (TDNN) with two hidden layers and no
feedback, between the following four classes; buses or lorries,
saloon cars, motorcycles, and light goods vehicle or vans. The
reported classification accuracies achieved, particularly with
adaptively changed threshold, were above 84%. These results were
seen as good, therefore, it might be a good reference for the the
current research.
(c) [Wu et al., 1998, 1999] Another example was reported in two
similar papers published firstly in a conference proceedings and
then in a journal. The adapted method was called “eigenfaces
methods”, which had been used in human face image recognition
beforehand. It is also known as Karhunen-Loeve expansion or
PCA. The feature vectors of acoustic signals were collected with
FFT power spectrum, which was then normalised per frame to unit
power. Some adjustment was also applied to reduce the impact of
insignificant parts before PCA was performed. The class of
unknown samples was determined according to the distance of the
new feature vector from the reference, which was prepared in
advance during training by using only selected data, recorded at the
same location under very similar conditions. Recordings of saloon
type cars were used as the training samples during the experiment.
The distributions of training and test sample sets were exhibited in
graphs, but no numerical values for classification accuracy nor
sample size was included. It was pointed out that the algorithm was
susceptible to the change in recording conditions; furthermore,
more data would be required to study sample distributions that
usefully display the signals’ distinguishable attributes. (d) [Jacyna
et al., 2005; Necioglu et al., 2005] A group of researchers at the
MITRE Corporation in the USA have published work on
developing acoustic road vehicle classification algorithms for
networked sensor systems [Jacyna et al., 2005]. Their approach
was based on a hierarchical network topology, and the
classification was performed between two road vehicle classes: the
“light” and the “heavy”. Firstly they looked into algorithm
development for a simple classification that can be performed at
each sensor node. The feature vectors were extracted by a
combination of FFT and 8-band filterbank, and then classified by a
so-called “linear-weighted classifier”. Although there was not
much information about the actual experimental results nor the
total number of different vehicles involved in the experiment, other
than mentioning the number of 125ms long audio file segments for
car and truck signals; it was reported that they managed to achieve
the minimum error rate of approximately 13%.
Secondly, according to another paper [Necioglu et al., 2005], a
more sophisticated classification algorithm that can be processed
on the features collected by the each node described above, but at
the next stage of the hierarchical network topology, was examined.
Although the feature extraction algorithm was similar to that of the
first one, this time they disclosed more information regarding the
experiment and the data set, in which the effects of small parameter
variation were also examined. The selected classification algorithm
for this stage was ML estimation with GMM. It was reported that
when the feature vectors, which were the filterbank output of
spectral energy, were scaled logarithmically; the minimum error
rate was found to be nearly 7%.
(e) [Sobreira-Seoane et al., 2008] An algorithm that has some
degree of similarity to the one studied for the current research in a
sense as they both consist of two stages, such as vehicle presence
detection and classification, was reported at a conference, which
some of the findings of this PhD research was also presented at. It
was realised that the obvious difference between the two
algorithms would be that Sobreira-Seoane purely relied on acoustic
signals. For vehicle detection, Short Time Energy (STE) and
envelope peaks were used. The chosen feature extraction
algorithms for classification stage were; Zero-Crossing Rate
(ZCR), “Spectral Centroid (centre gravity of spectral power
distribution)”, “Spectral Rolloff Point”, Subband Energy Ratio
(SBER), and MFCC. kNN and LDA algorithms were utilised as the
classifiers. The primary results showed that the combination of
kNN and three feature extraction algorithms; Spectral Rolloff
Point, SBER and MFCC, performed comparatively better, and
achieved nearly 90% accuracy.
(f) [Lu et al., 2008a,b] A vehicle detection algorithm, based on
studies in mammalian perception and neurology, was suggested in
articles in IEEE conference proceedings. This was another research
initiated from an augment that “there exists similarity between
vehicle and speech recognition”[Lu et al., 2008a, p.1336].
However, once again, they included no evidence nor discussion to
support such a view point. Their recommendation was to use
gammatone filterbank on STFT for feature extraction, dimension
reduction and the two-step decision making processes to first
detect the presence of vehicles before classifying them into four
vehicle groups. They conducted experiments to compare MFCC
and gammatone auditory filterbank on STFT. They showed that the
gammatone filterbanks outperformed MFCC under noisy
environment whereas MFCC was better in less noisy conditions. In
addition, a technique called Spectro-Temporal Representation
(STR) was described. This enhanced the correlation between
neighbouring signal frames, and the use of Nonlinear Hebbian
Learning (NHL) for reducing the dimension improved the
detection accuracy. In the best case, under less noisy environment
where the SNR was 10dB, it achieved about 95% accuracy, on
average under two kinds of noise although the performance
declined significantly as SNR decreased. They argued that the
algorithm could be expanded to classification tasks without
difficulty
(g) [Anami and Pagi, 2009] Recognition algorithms for two-wheel
vehicles were investigated. Vectors extracted by three time domain
methods, such as ZCR, STE and Root Mean Square(RMS) plus
two frequency domain feature extraction methods, “Mean and
Standard Deviation of Spectrum Centroid (CMEAN and CSD)”
were applied to the NN for classifying between two classes:
“bikes” and “scooters”. The recorded acoustic signals of 118
vehicles were utilised, of which 58 were for training and the rest
was for testing. It achieved 73.33% accuracy between the two
classes. The observed effects of vehcie ages and how well they
were maintained within the same class were also mentioned. Such
information can be useful for certain applications that have only

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
20 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
known and limited targets, however, it does not apply to the
current project.
(f) [Amit Satpathy 2014] proposes two sets of novel edge-texture
features, Discriminative Robust Local Binary Pattern (DRLBP)
and Ternary Pattern (DRLTP), for object recognition. By
investigating the limitations of Local Binary Pattern (LBP), Local
Ternary Pattern (LTP) and Robust LBP (RLBP), DRLBP and
DRLTP are proposed as new features. They solve the problem of
discrimination between a bright object against a dark background
and vice-versa inherent in LBP and LTP. DRLBP also resolves the
problem of RLBP whereby LBP codes and their complements in
the same block are mapped to the same code. Furthermore, the
proposed features retain contrast information necessary for proper
representation of object contours that LBP, LTP, and RLBP
discard. Our proposed features are tested on seven challenging data
sets: INRIA Human, Caltech Pedestrian, UIUC Car, Caltech 101,
Caltech 256, Brodatz, and KTH-TIPS2- a. Results demonstrate that
the proposed features outperform the compared approaches on
most data sets.
(g) [Xueyun Chen, Shiming Xiang, Cheng-Lin Liu, and Chun-
Hong Pan 2014] Detecting small objects such as vehicles in
satellite images is a difficult problem. Many features (such as
histogram of oriented gradient, local binary pattern, scale-invariant
feature transform, etc.) have been used to improve the performance
of object detection, but mostly in simple environments such as
those on roads. Kembhavi et al. proposed that no satisfactory
accuracy has been achieved in complex environments such as the
City of San Francisco. Deep convolutional neural networks
(DNNs) can learn rich features from the training data automatically
and has achieved state-of-the-art performance in many image
classification databases. Though the DNN has shown robustness to
distortion, it only extracts features of the same scale, and hence is
insufficient to tolerate large-scale variance of object. In this letter,
we present a hybrid DNN (HDNN), by dividing the maps of the
last convolutional layer and the maxpooling layer of DNN into
multiple blocks of variable receptive field sizes or max-pooling
field sizes, to enable the HDNN to extract variable-scale features.
Comparative experimental results indicate that our proposed
HDNN significantly outperforms the traditional DNN on vehicle
detection.
3. Experimental Result and Analysis
Satellite resolution and object-oriented detection method are being
better day by day in satellite images. Comparing to traditional data
acquired methods, in large area satellite images the heavy traffic
data can be faster and widely acquired. In this work first of all the
image quality is improved, and then the multiscale segmentation
technology is used and the vehicles are detected from satellite
images from supervised classification method [44]. The simple
morphological recognition method is used for vehicle detection
using image processing technique in Matlab which is one of the
best methods for detection of trucks, cars, bikes and buses etc.
4.1 Data Information
This thesis work is used five images named New 5, D10, New
3, New 4 and New 7 as a reference. And step by step process
is described on the image New 5. Images are shown in 4.1,
4.2, 4.3, 4.4, 4.5 figures.
Figure 4.1: New 5 image (reference image no. 1)
Figure 4.2: D10 image (reference image no. 2)
Figure 4.3: New 3 image (reference image no. 3)
Figure 4.4: New 4 image (reference image no. 4)

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
21 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Figure 4.5: New 7 image (reference image no. 5)
4.2 Methodology
Morphological recognition algorithms are used to develop an
automated system in MATLAB R2013a. In which satellite images
are taken as input and converted into gray scale image for pre-
processing. After conversion these images are converted into
binary images after image complement. After conversion canny
edge detection method has done and passed this detection to the
dilation process. The area is selected after filtration and dilation
where number of vehicles is maximum and vehicles are recognized
from the image in the form of bounding box. The number of
vehicles is counted by blob analysis. Here we are using reference
image New 5.
Figure 4.6: Block Diagram of vehicle detection from satellite image using canny edge
The steps in block diagram are elaborated below:
1) Satellite Image Acquisition:
a) Read Satellite image
b) Resize Image
2) Necessary Operations
a. RGB to Gray Scale conversion
3) Image segmentation process
a. Gray image to Binary conversion
b. Edge Detection
4) Image Enhancement
a. Filling Holes on images
b. Creating Holes Edge Detected Images
c. Filteration of image using Bewareopen
command using High pass filter
4.3 Process to detect vehicles from satellite images
Process to detect vehicle include many steps. Descriptions of these
steps are as following:
Figure 4.7: Acquired Image

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
22 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Figure 4.8: RGB to Gray Scale Conversion
Figure 4.8: Binary Converted Image
Figure 4.9: Canny Edge Detection
Figure 4.10: Filling contour holes for vehicle detection.
Figure 4.11: Filtration using high pass filter
Figure 4.12: cropped area
4.3.9 Detected Vehicles using Blob Analysis
Blob Analysis is a fundamental technique of machine
vision based on analysis of consistent image regions. As
such it is a tool of choice for applications in which the
objects being inspected are clearly discernible from the
background. Diverse set of Blob Analysis methods allows
creating tailored solutions for a wide range of visual
inspection problems.

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
23 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Figure 4.13: Detected Vehicles shown by green bounding box
Figure 4.14: pop up window after detecting the vehicles
4.4 Result
Same method is applied on the reference images new image
4, new image 3, new image 7, and D10. Figure 4.15, 4.17,
4.19, 4.21 and 4.23 shows the gray level graphs of reference
new image 5, new image 7, D10, New image 4 and new
image 3 respectively. In this approach we applied both pixel
level and Otsu thresholding method for all of the images. The
overall result will be shown as the comparison table and the
result shows that pixel level thresholding method is faster
than Otsu method.
Figure 4.15: Graph of New Image 5
Figure 4.16: Detected vehicle of new image 5
Figure 4.17: Graph of New image 7
Figure 4.18: Detected vehicle of new image 7
0
500
1000
1500
2000
2500
Displays number of gray value
0 50 100 150 200 250

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
24 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Figure 4.19: Graph of image D10
Figure 4.20: Detected vehicle of Image D10
Figure 4.21: Graph of New image 4
Figure 4.22: Detected vehicle of new image 4
Figure 4.23: Graph of New image 3
Figure 4.24: Detected vehicle of new image 3
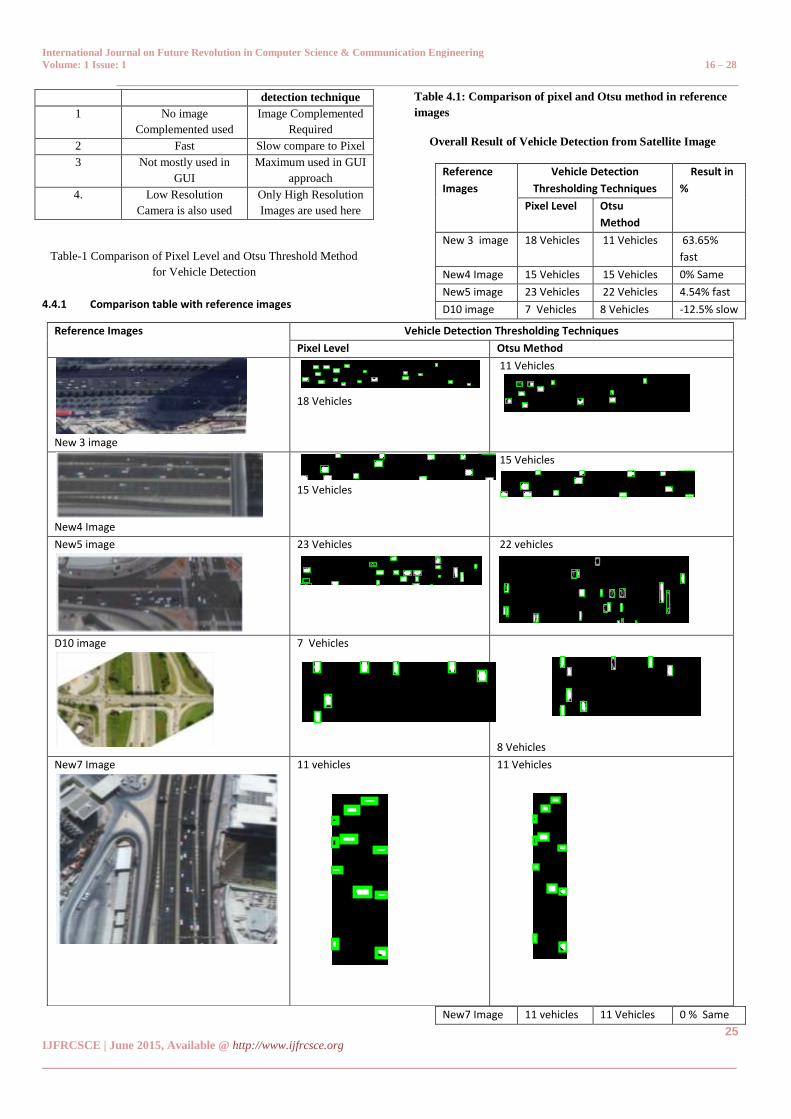
Table 1 show the comparison between pixel level and Otsu
method which we used in this proposed work.
Table 2 shows that in the new 3 image when we calculates
the vehicles from pixel level thresholding method it
calculated 18 vehicles and when we calculate from Otsu
method then it calculate 11 vehicles. So it works 63.65%
faster.
In the image new 4 image when we calculates the vehicles
from pixel level thresholding method it calculated 15 vehicles
and when we calculate from Otsu method then it calculate
15 vehicles. So it works same.
.
In the image new 5 when we calculates the vehicles from
pixel level thresholding method it calculated 23 vehicles and
when we calculate from Otsu method then it calculate 22
vehicles. So it works 4.54% faster.
In the image D10 when we calculates the vehicles from pixel
level thresholding method it calculated 7 vehicles and when
we calculate from Otsu method then it calculate 8 vehicles.
So it works 12.5 % slower.
In the image new 7 when we calculates the vehicles from
pixel level thresholding method it calculated 11 vehicles and
when we calculate from Otsu method then it calculate 11
vehicles. So it works same.
The overall result shows that pixel level thresholding method
is faster than Otsu thresholding method.
Sr. No Pixel level
(This Method)
Otsu Method
Previous vehicle
0
1000
2000
3000
4000
5000
6000
7000
8000
Displays number of gray value
0 50 100 150 200 250
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Displays number of gray value
0 50 100 150 200 250
0
500
1000
1500
2000
2500
3000
3500
Displays number of gray value
0 50 100 150 200 250
International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
25 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
detection technique
1 No image
Complemented used
Image Complemented
Required
2 Fast Slow compare to Pixel
3 Not mostly used in
GUI
Maximum used in GUI
approach
4. Low Resolution
Camera is also used
Only High Resolution
Images are used here
Table-1 Comparison of Pixel Level and Otsu Threshold Method
for Vehicle Detection
4.4.1 Comparison table with reference images
Table 4.1: Comparison of pixel and Otsu method in reference
images
Overall Result of Vehicle Detection from Satellite Image
Reference
Images
Vehicle Detection
Thresholding Techniques
Result in
%
Pixel Level Otsu
Method
New 3 image 18 Vehicles 11 Vehicles 63.65%
fast
New4 Image 15 Vehicles 15 Vehicles 0% Same
New5 image 23 Vehicles 22 Vehicles 4.54% fast
D10 image 7 Vehicles 8 Vehicles -12.5% slow
New7 Image 11 vehicles 11 Vehicles 0 % Same
Reference Images Vehicle Detection Thresholding Techniques
Pixel Level Otsu Method
New 3 image
18 Vehicles
11 Vehicles
New4 Image
15 Vehicles
15 Vehicles
New5 image
23 Vehicles
22 vehicles
D10 image
7 Vehicles
8 Vehicles
New7 Image
11 vehicles
11 Vehicles

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
26 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
Table 2: comparison of pixel level and Otsu method in
percentage
% faster/slowe calculation = (pixel level thresholding-Otsu
Method)/Otsu Method
Overall Average among 5 Images would be 11.138%
Overall System Average = New3+New4+New5+D10+New7/5
Overall System Average = 63.65+0+4.54+ (- 12.5)+0/5
Pixel level Thresholding Overall System Average = 11.138%
Our Research says that pixel level threholding method is faster
than the Otsu method.
4.4.2 Profiler Time of Otsu Level Threholding
Figure 4.25: Profile time of Otsu level Thresholding
4.4.3 Profiler Time of Pixel Level Threholding:
Figure 4.26: Profile time of Pixel level Thresholding
5.1 Conclusion
By the time the numbers of vehicles and traffic have been
increasing day by day. With this increase, it is becoming harder to
track each vehicle for the purpose of traffic management and law
enforcement. Thus, a type of system is required, which is capable
of give appropriate solutions to the traffic issues and hence this
Vehicle detection from satellite image is developed using
morphological recognition algorithm in MATLAB and this thesis
compare two thresholding techniques to get the best result.
Morphological recognition algorithms are used to develop an
automated system in MATLAB R2013a. In which satellite images
are taken as input and converted into gray scale image for pre-
processing. After conversion these images are converted into
binary images after image complement. After conversion canny
edge detection method has done and passed this detection to the
dilation process. The area is selected after filtration and dilation
where number of vehicles is maximum and vehicles are recognized
from the image in the form of bounding box. The number of
vehicles is counted by blob analysis. Here we compare two
algorithms like pixel thresholding and Otsu thresholding method.
According to our result Pixel level thresholding is better than Otsu
method. Here image complementation are not used which make
system more powerful and make system highly applicable. The
result concluded that pixel level thresholding is better than Otsu
method for detecting the vehicles from satellite imaginary.
5.2 Future Scope
This approach makes easier to detect vehicles from
stationary images, but for moving cars or vehicles this
method will not be applicable, therefore this problem
can also be overcome in near future in order to get
more appropriate consequences.
The effect of light on vehicles reduces accuracy when
this approach is applied, so there is some scope to
improvement here.
REFERENCE
[1] S.Jayalakshmi, M.Sundaresan, "A Study of Iris
Segmentation Methods using Fuzzy CMeans and K-
Means Clustering Algorithm", International Journal of
Computer Applications (0975 – 8887) Volume 85 – No
11, January 2014.
[2] http://elearning.vtu.ac.in/17/e-Notes/DIP/Unit1-SH.pdf.
[3] Megha Soni,Anand Khare, Asst. Prof. Saurabh Jain, "A
SURVAY OF DIGITAL IMAGE PROCESSING AND ITS
PROBLEM", International Journal of Scientific and
Research Publications, Volume 4, Issue 2, February 2014
1 ISSN 2250-3153..
[4] http://folk.uio.no/walmann/Publications/PhD/node36.h
tml.
[5] Yugha R1, Dr S Uma, Swarnalatha S, Poovizhi.M,
"Multilevel Authentication System For Providing
Security", IPASJ International Journal of Computer
Science (IIJCS), Volume 3, Issue 3, March 2015.
[6] http://www.wisegeek.org/what-is-image-
processing.htm.
[7] http://www.ncsa.illinois.edu/People/kindr/phd/PART1.P
DF.
[8] K. Sumithra, S. Buvana, R. Somasundaram, "A Survey on
Various Types of Image Processing Technique",
International Journal of Engineering Research &
Technology (IJERT) Vol. 4 Issue 03, March-2015.
[9] Ian Darwin, Valerie Quercia and Tim O’Reilly, "X Window
System User’s Guide", March, 1995.
[10] "Digital Image Processing" book, By Rafael C Gonzalez,
page no. 29.
[11] http://shodhganga.inflibnet.ac.in/bitstream/10603/826
9/9/09_chapter%201.pdf. Page no. 1-4.

International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
27 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________
[12] By Carolyn Asbury, "Brain Imaging Technologies and
Their Applications in Neuroscience".
[13] http://fas.org/irp/imint/docs/rst/Intro/Part2_1.html.
[14] http://bookboon.com/en/digital-image-processing-part-
one-ebook.
[15] Rafael C. Gonzalez, Richard E. Woods, "Digital Image
Processing Third Edition". 2008 by Pearson Education,
Inc.
[16] Ramya R, Anand Kumar S, Krinish N K, Suraj V, "Simulink
Component Recognition Using Image Processing",
International Journal of Scientific & Technology
Research Volume 4, Issue 02, February 2015.
[17] AMALOPRAVAM.G,HARISH NAIK T,JYOTI KUMARI,
"Transformation of Digital Images using Morphlogical
Operations", ISSN: 2278-9669, January 2013
(http://ijcsit.org)..
[18] e-Study Guide for: Artificial Intelligence by Stuart
Russell, ISBN 9780136042594,By Cram101 Textbook
Reviews.
[19] Trapti Sahu, Shabahat Hasan, "A Neural Network Based
Image Abstraction Technique", www.ijset.com, Volume
No.1, Issue No.2 pg:143-147, 01 April 2012..
[20] http://www.uptu.ac.in/pdf/sub_ecs_702_30sep14.pdf
(Notes Subject: Digital Image Processing Subject Code:
Ecs-70) Asst. Prof. Neeti Chadha CSE Department,
AKGEC Gzb page no. 5, 6.
[21] Naoko Evans, "Automated Vehicle Detection and
Classification using Acoustic and Seismic Signals",
September, 2010, page no.40-47.
[22] Ozcanli Ozbay, Ozge Can, "Recognition of Vehicles as
Changes in Satellite Imagery", 2010.
[23] "Remote sensing imagery in vegetation mapping: a
review" Plant Ecol (2008) 1 (1): 9-23. doi:
10.1093/jpe/rtm005..
[24] T. Blaschke, "Object based image analysis for remote
sensing", ISPRS Journal of Photogrammetry and Remote
Sensing, Volume 65, Issue 1, January 2010, Pages 2–16.
[25] Christof Ridder, Olaf Munkelt, and Harald Kirchner,
"Adaptive background estimation and foreground
detection using Kalman-filtering," in Proceedings of
International Conference on Recent Advances in
Mechatronics, 1995.
[26] S Huwer and H Niemann, "Adaptive change detection
for real-time surveillanace applications," Visual
Surveillance, 2000.
[27] T Kanade, R Collins, A Lipton, P Burt, and L Wixson,
"Advances in cooperative multi-sensor video
surveillance," in Proceedings of DARPA Image
Understanding Workshop, vol. 1, 1998.
[28] Chris Stauffer and W E Grimson, "Adaptive background
mixture models for real time tracking," in Proceedings of
IEEE Conf. on Computer Vision and Pattern Recognition
(CVPR)., vol. 2, 1999, pp. 246-252.
[29] Richard O Duda, Peter E Hart, and David G Stork, Pattern
Classification.: Wiley-Interscience, 2001.
[30] Oscar Firschein and Thomas M Strat, RADIUS: Image
Understanding for Imagery Intelligence.: Morgan
Kaufmann, 1997.
[31] Andres Huertas and Ramakant Nevatia, "Detecting
changes in aerial views of man-made structures," in
Proc. of International Conference on Computer Vision,
1998.
[32] Aaron J Heller, Yvan G Leclerc, and Quang-Tuan Luong,
"A framework for robust 3-d change detection," in
Proceedings for International Symposium on Remote
Sensing, SPIE., 2001.
[33] Richard I Hartley and Tushar Saxena, "The cubic rational
polynomial camera model," in DARPA Image
Understanding Workshop, 1997.
[34] Thomas Pollard, Ibrahim Eden, Joseph L Mundy, and
David Cooper, "A Volumetric Approach to Change
Detection in Satellite Images," Photogrammetric
Engineering and Remote Sensing, vol. 75, no. 12, p. to
appear, December 2009.
[35] Thomas Pollard, Comprehensive 3-d change detection
using volumetric appearance modeling, 2008.
[36] Gonzalez, R., and Woods, R., Digital Image
Processing, second edition, Prentice Hall, 2002.
[37] Lizhu Xie, Liying Wei, “Research on Vehicle Detection in
High Resolution Satellite Images”, 2013 Fourth Global
Congress on Intelligent Systems.
[38] X. Yang, G. A. Tang, F. D. Deng, EDARS Experiment
Tutorial of Remote Sensing Image Processing. Beijing,
CHN: Science press, 2009.
[39] X. L. Tian, “An Algorithm Based on the Satellite for Image
Enhancement,” COMPUTER KNOWLEDGE AND
TECHNOLOGY, vol. 11, pp. 315–317, Feb. 2008.
[40] Bhabatosh Chanda and Dwijest Dutta Majumder, 2002,
Digital Image Processing and Analysis.
[41] http://elearning.vtu.ac.in/17/e-
Notes/DIP/Unit%205%20&%206%20-%20SH.pdf.
[42] Otsu, Nobuyuki, “A threshold selection method from
gray-level histograms”, IEEE transactions on systems,
man, and cybernetics, vol. SMC9, no.1, January 1979,
pp.62-66
[43] The MathWorks, Inc., Image Processing Toolbox, URL:
http://www.mathworks.com/access/helpdesk/help/tool
box/images/
[44] Lizhu Xie, Liying Wei. “Research on Vehicle Detection in
High Resolution Satellite Images”, 2013 Fourth Global
Congress on Intelligent Systems.
[45] Sumalatha Kuthadi, “DETECTION OF OBJECTS FROM
HIGH-RESOLUTION SATELLITE IMAGES", May 2005, page
no. 5-10.
[46] Rocio Alba-Flores, "Evaluation of the Use of High-
Resolution Satellite Imagery in Transportation
Applications", August 2005, page no. 18-22.
[47] http://www.eecs.berkeley.edu/~fateman/kathey/node3
.html.
[48] http://en.wikipedia.org/wiki/K-means_clustering.
International Journal on Future Revolution in Computer Science & Communication Engineering
Volume: 1 Issue: 1 16 – 28
_____________________________________________________________________________________
28 IJFRCSCE | June 2015, Available @ http://www.ijfrcsce.org _______________________________________________________________________________________