arena - dynamic run-time map generation for multiplayer shooters
TRANSCRIPT

ARENA- Dynamic Run-time Map generation for Asynchronous
Multiplayer Shooter
Bhojan Anand (Presenter), Wong Hong Wei
ICEC 2014

Asynchronous Gameplay
Multiplayer Shooter+

Human Imitating Botsachieved with
David Bot John
Bot
YOU

Building an Asynchronous
Multiplayer Shooter with Procedurally Generated
Content

Procedurally generateMultiplayer Maps for Shooters

ARENAvideo demonstration

1) Motivation
2) Design & Implementation
3) Evaluation

• Procedural Generation of Map
“drastically reduce development time”“improved longevity from unlimited
maps”• Human Imitating Bots
[Extended Ver]“brings Asychronous Gameplay to
shooters”“play a multiplayer shooter when friends
are unavailable”
1) Motivation

1) Motivation
2) Design & Implementation
a) Procedural Generation of Map
b) Human Imitating Bots
3) Evaluation

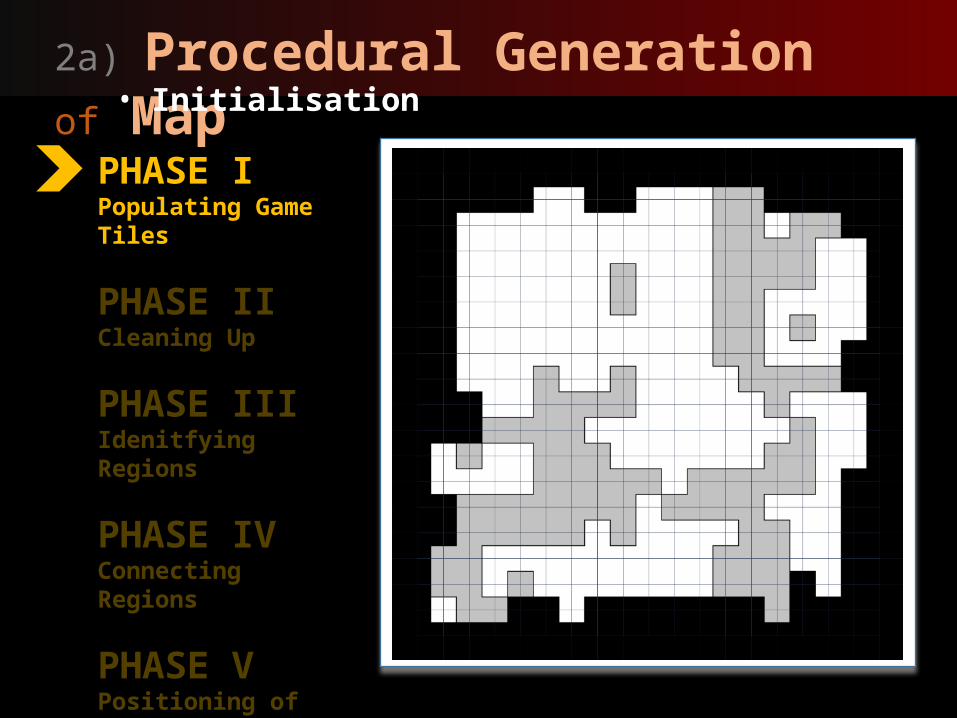
2a) Procedural Generation of Map• Initialisation
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
JoinRule
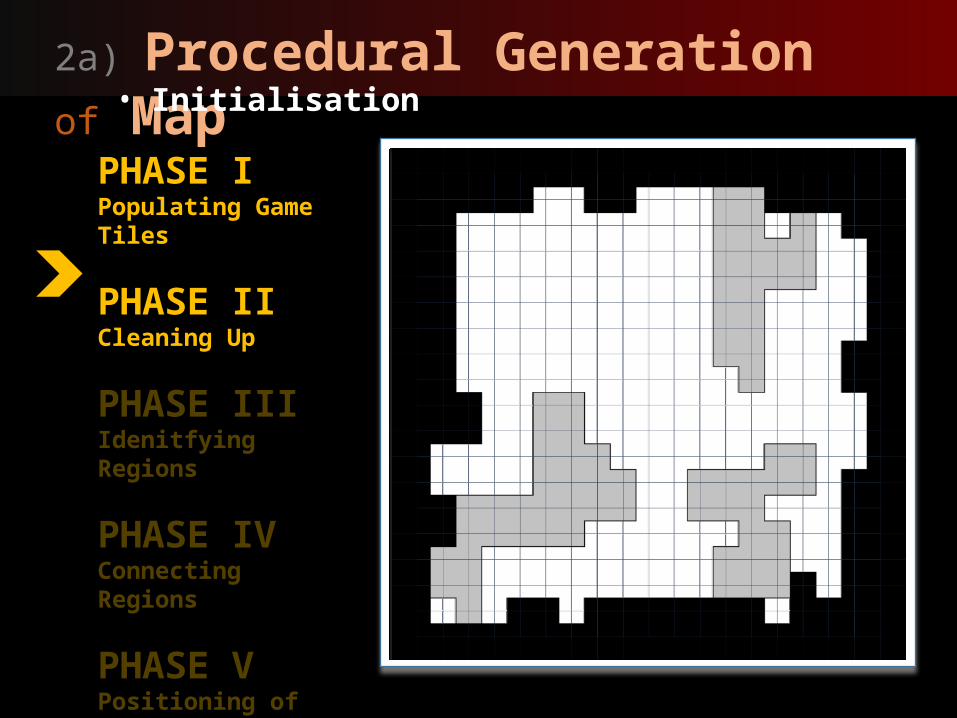
2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
Spawn (red)
Spawn (blue)

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
TeamFlag (red)
TeamFlag (blue)

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
Flag
Flag

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
Collision Point

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
Cover Cover
Cover

2a) Procedural Generation of Map
PHASE IPopulating Game Tiles
PHASE IICleaning Up
PHASE IIIIdenitfying Regions
PHASE IVConnecting Regions
PHASE VPositioning of Strategic Points
• Initialisation
CoverCover
Cover
CoverCover

2a) Procedural Generation of Map• Evolution
Map Fitness =Connectivity
Forced Collision Pointslimited to 1 or 2
Flag Fairnessdifference in distance to own team flag
Overall Flag Fairnessdifference in distance to all flags
+
+
+
In line with the DESIGN GOALS:-
- Fast generation- Collision Points - Flow - Navigability, Pacing- Fairness- Asthetics

2a) Procedural Generation of Map• Evolution

2a) Procedural Generation of Map• Mapping
Each tile ismapped
to produce

1) Motivation
2) Design & Implementation
a) Procedural Generation of Map
b) Human Imitating Bots
3) Evaluation

• Analytical Evaluationusing measurements / analysis of
generated map• Subjective Evaluation
using online user study- 53 respondents- no knowledge of project nature
3) Evaluation
Based on Design Goals

Analytical
Subjective
Fast Generation
• Generated 3 maps,in 10.1s, 9.9s, 11.5s
• Not very acceptable
• Can be improved with less populations
• Reached max fitness within 30 populations
• Much faster than previous works

Analytical
Subjective
Collision Points
• Defined well• Prone to meet in
middle
• Mean 3.60, StdDev 1.25
• Hypothesis that locations are sparsely located can be rejected at 0.05 significance

Analytical
Subjective
Flow – Navigability & Pacing
• Indoor/outdoor areas
• Unique items• Few deadends
• Good navigability

Analytical
Subjective
Flow – Navigability & Pacing
• Indoor/outdoor areas
• Unique items• Few deadends
• Mostly falls in middle
• May be due to difficulty in measuring pacing

Analytical
Subjective
Fairness
• Time to navigate to flags- 58.88s from red team- 60.21s from blue team
• Suggests high fairness at 0.05 significance

Demography

Thank
You!
Play the game @http://www.comp.nus.edu.sg/~hongjun/GD.html
Bhojan Anand (Presenter), Wong Hong Wei