application of real-time scheduling techniques to agent-based distributed production systems
DESCRIPTION
Application of Real-Time Scheduling Techniques to Agent-Based Distributed Production Systems. 04.11.2002. Goals. Novel application area of RT Systems Put the RT scheduling theory into Production Control System practical applications - PowerPoint PPT PresentationTRANSCRIPT
1
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Application of Real-Time Scheduling Techniques to Agent-Based Distributed Production Systems
04.11.2002

2
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Goals
• Novel application area of RT Systems
• Put the RT scheduling theory into Production Control System practical applications
• Allow predictable aperiodic scheduling in the presence of periodic tasks in a production stage and shift of a PCS
3
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Overview
• Main focuses
• Taxonomy of multiprocessor platforms
• Parallel uniform platforms: Why?
• Comparative study of relevant RT Multiprocessor Scheduling Algorithms
• Resource augmentation technique
• System characteristics
• TBS on uniform multiprocessors
• Schedulability analysis
• Example
• Performance evaluation
4
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Main focuses
• structure and present a methodology of a manufacturing system under RT-Contraints
• thorougly examine and compare the literature of real-time scheduling theory and its application to Production Control Systems
• Present a firm real-time scheduling technique of a distributed production control system
• to develop predictable computational methods for studying the aperiodic scheduling problem in uni- and multiprocessor manufacturing systems under real-time constraints.

5
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Workload considerations in a traditional PCS
Raw material ProductParts Parts Parts AssemblyGalvanicMachiningBroaching
Parallel uniform machines
Parallel uniform machines
Parallel uniform machines
Parallel uniform machines
Pre-planned production of parts realized by traditional production planning and control systems

6
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Raw material ProductParts Parts Parts AssemblyGalvanicMachiningBroaching
Parallel uniform machines
Parallel uniform machines
Parallel uniform machines
Parallel uniform machines
Periodic and aperiodic production of parts in a production system underlying real-time constraints
Workload considerations in a RT- PCS

7
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
• Parallel identical machines: Same task production time for all machines
• Parallel uniform machines: Machines differ in their production time, but production time does not depend from the type of the task
• Parallel unrelated machines: The production time of the machine depends from the type of the task.
Taxonomy of multiprocessor platforms

8
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
• give production system designers the possibility to use machines with different production speeds
• Need for machines with lower production capacity to execute non-real-time or aperiodic tasks
• Need for upgrade of some machines
Parallel uniform platforms: Why?

9
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Comparative study of relevant RT Multiprocessor Scheduling Algorithms
References YearPlat-form
Heuristic sched.
Predi-ctable sched.
Serv. alg.
Off-line
On-line
PT ST AT
Com. time
Pre-emption
No preem-ption
CST = 0
CST > 0
Int. sched.
par.Int. per.
Prio-rity SM DM
Ind. Tasks
Prec. Cons. JC RM
Over-load
DL78 1978 M X XLM81 1981 PI, PU X X X X X XRS84 1984 M X XDD86 1986 M X XZRS87, ZRS87a 1987 M X XTWW87 1987 M X X
SLCG89 1989 U, MI X X X XRSS90 1990 M X X XBHR90 1990 U, PI X X XSR91 1991 M, D X X X SDTB93 1993 U, M X X X X X X FiKS93 1993 PI X X F X X X X X
FS94 1994 M X X X X HS XOS94 1994 M X X HTL95 1995 M X XLH95 1995 M, D X X X X XRM95 1995 M, D H X FiBCPV96 1996 MI X XPSTW97 1997 MI X X X X X XAH98 1998 M, D X X XMR99 1999 MI X XPBWB00 2000 M, D X X X X XGLN01 2001 M XZMC01 2001 M X XHA01 2001 M XRS01 2001 M X SNLC01 2001 M X XABJ01 2001 MI X X FiAS00a 2001 MI XFGB01 2001 MU X X XMW01 2001 PU X X F S

10
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
• Philipps et al. (1997)
Preemptive identical multiprocessor setting. Several on-line algorithms that prove poor performance from an absolute worst-case perspective, are optimal when allowed moderately more resources.
• Funk et al. (2001) extended this method to be applied upon uniform parallel machines. However, their results apply only to periodic tasks!
Resource Augmentation technique

11
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
System characteristics
• = {s1, s2, s3, ..., sm} / m * and sj sj+1 for all j, 1 j< m:m-machine uniform multiprocessor platform with speeds or production capacities s1, s2, s3, ..., smrespectively.• = {i,j / i,j *} A set of periodic tasks with hard deadlines• J = {Ji,j / i,j *} A set of hard aperiodic tasks ordered by increasing deadlines• Each job is characterized by: arrival time ri , production time ci, deadline di, period pi. • ui = ci / pi is the utilization of a task. The tasks in and J are indexed according to a decreasing utilization
•Job preemption is permitted. O = {Oj,m / i *} changeover time caused by the arrival of part from type j at the machine m.
• Job parallelism is forbidden.
12
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
• Advantages on uniprocessor platforms: good performance low memory capacity low implementation complexity better maintainability low computational complexity less changeover time overheads
• Rules: 1. No machine is idled while there is an active job awaiting execution 2. When fewer than m jobs are active, they are executed upon the fastest machines while the slowest are idled 3. Higher priority jobs are executed on faster processors 4. When the jth aperiodic request arrives at time t=rj Cj + 2Oj,m dj = rj + Us
TBS on uniform multiprocessors

13
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Definition: (Funk et al.)
m
sk
k=j+1 = max ______
Sj
• measures the „degree“ by which differs from an identical multiprocessor platform. • Speed of processors differ from each other becomes smaller.
TBS on uniform multiprocessors

14
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Lemma 1. (Funk et al.)
If the following condition is satisfied
S‘m ‘. s1 + Sm
then for any set of jobs I and at any time-instant t 0
W(A‘, ‘,I,t) W(A, ,I,t)
• Condition expresses the additional production capacity needed by ‘ in terms of the parameter ‘ and the speed of the fastest processor in • the smaller the value of ‘, the more ‘ deviates from being an identical multiprocessor, the smaller the amount of this excessing processing power needed.
TBS on uniform multiprocessors
15
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Theorem 1.
If the condition of Lemma 1 is satisfied
S‘m ‘. s1 + Sm
then I will meet all deadlines when scheduled using TBS algorithm executing on ‘.
TBS on uniform multiprocessors
16
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Schedulability Analysis
Theorem 2
Given a set of n periodic tasks with machine utilization Up and a TBS with machine utilization Us, the whole set is feasibly scheduled upon a multiprocessor platform if and only if
Up + Us Sm
where
Up = Up1 + Up2 + ... + Upm
Theorem 3 (Funk et al)
A periodic task system will meet all deadlines when scheduled on ‘
S‘m ‘ * max{u1,Up/m} + Up

17
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Schedulability Analysis
Theorem 4...
S‘m = ‘‘* u1+ Up+ Us
The aperiodic task system J has a utilization
Us = S‘m - ‘‘* u1 - Up

18
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Example
• Consider a task system comprised of five periodic tasks (ci,pi)
= { (15,10) , (4,5) , (14,20) , (6,15) , (2,10) }
and an aperiodic task (ri,ci)
J = { (5,3) }
to be TBS scheduled upon the uniform multiprocessor platform‘ = [3,1,0.5]. Will all deadlines be met?
• By definition ‘= max {(1+0.5)/3, 0.5/1} = 0.5• By (Funk et al.) is feasible on some 3-processor multiprocessor platform having a total computing capacity 1,5+0,8+0,7+0,4+0,2=3,6and with the fastest processor having a computing capacity s1=u1=1,5• By Theorem 4, we obtain Us=0,15• dj=max{5,0}+(3/0.15)=35

19
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Performance Evaluation
0%
20%
40%
60%
80%
100%
1 2 3 4 5 6 7 8 9 10 11 12 13 14
Changeover time versus production time
Changeover time
Production time

20
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
Performance evaluation of aperiodic tasks scheduled with TBS upon a uniform multiprocessor platform
0
500
1000
1500
2000
2500
1 2 3 4 5 6 7 8 9 10 11 12 13 14
Tasks
Tim
e u
nit
s
Deadlines for Us=2
Deadlines for Us=1.5
Deadlines for Us=1
Deadlines for Us=0.5
Deadlines for Us=0.15
Arrival time
Performance Evaluation
21
HEINZ NIXDORF INSTITUTWG Prof. Dr. F.J. RammigM.Sc. Dania A. El-Kebbe
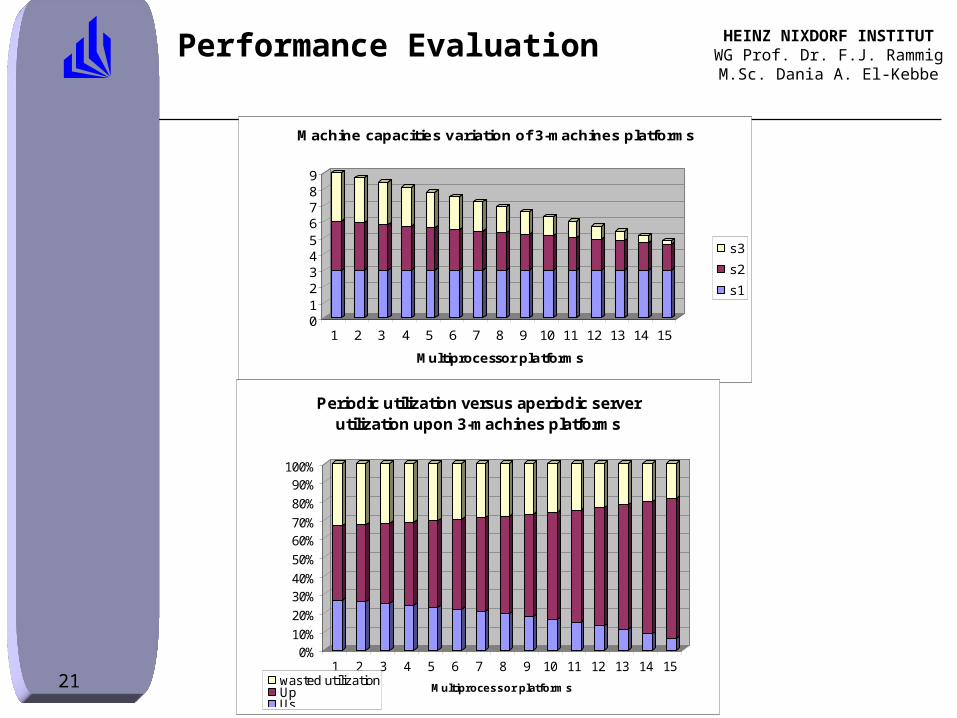
Performance Evaluation
0123456789
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Multiprocessor platforms
Machine capacities variation of 3-machines platforms
s3
s2
s1
0%10%
20%
30%40%
50%
60%70%
80%
90%100%
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Multiprocessor platforms
Periodic utilization versus aperiodic server utilization upon 3-machines platforms
wasted utilizationUpUs