anÁlise e caracterizaÇÃo da potÊncia elÉtrica gerada … · 3.captação de energia. 4....
TRANSCRIPT

ROBÉRIO PAREDES MOREIRA FILHO
ANÁLISE E CARACTERIZAÇÃO DA POTÊNCIA ELÉTRICA GERADA COM
ELEMENTO PIEZOELÉTRICO
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia Elétrica - PPGEE, da Universidade Federal da Paraíba - UFPB, como requisito parcial para a obtenção do título de Mestre em Engenharia Elétrica. Orientador: Prof. Dr. Cícero da Rocha Souto
JOÃO PESSOA-PB
2014
FICHA CATALOGRÁFICA
M838a Moreira Filho, Robério Paredes. Análise e caracterização da potência elétrica gerada com
elemento piezoelétrico / Robério Paredes Moreira Filho.-- João Pessoa, 2014.
141f. : il. Orientador: Cícero da Rocha Souto Dissertação (Mestrado) - UFPB/CEAR 1. Engenharia elétrica. 2. Materiais piezoelétricos.
3.Captação de energia. 4. Energia elétrica - geração. 5. PZT.
6.Vibração mecânica.
UFPB/BC CDU: 621.3(043)
UFPB/BC CDU:
621.3(043)

UNIVERSIDADE FEDERAL DA PARAÍBA - UFPB
CENTRO DE ENERGIAS ALTERNATIVAS E RENOVÁVEIS – CEAR
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA - PPGEE
A Comissão Examinadora, abaixo assinada, aprova a defesa de Dissertação
ANÁLISE E CARACTERIZAÇÃO DA POTÊNCIA ELÉTRICA GERADA COM
ELEMENTO PIEZOELÉTRICO
Elaborada por
ROBERIO PAREDES MOREIRA FILHO
como requisito parcial para obtenção do grau de
Mestre em Engenharia Elétrica.
COMISSÃO EXAMINADORA
PROF. DR. CÍCERO DA ROCHA SOUTO
(Presidente)
PROF. DR. ANTONIO AUGUSTO LISBOA DE SOUZA
(Examinador Interno)
PROF. DR. CARLOS JOSÉ DE ARAÚJO
(Examinador Externo)
João Pessoa/PB, 28 de Fevereiro de 2014.

Deus pelo entendimento e paciência.
Às pessoas que dão razão a minha existência: meus pais e irmãs.
Dedico

AGRADECIMENTOS
Agradeço principalmente e primeiramente a Deus, por ter me dado
condições de chegar onde estou sempre com muita luta e dedicação. Agradeço pela
paciência, pelo amparo, pela saúde, pela capacitação. Obrigado Senhor, Tu és fiel.
Aos meus queridos pais, minhas irmãs, meus avós paternos e maternos,
tios, primos e amigos que sempre acreditaram no meu potencial e por me
estimularem sempre nos momentos mais difíceis. Agradeço, acima de tudo pelo
amor, estímulo, paciência, apoio incondicional que todos vocês sempre me deram.
Ao professor e orientador Prof. Dr. Cícero da Rocha Souto pela oportunidade
de realizar esta pesquisa, pela orientação, espírito científico, pelo estímulo, pela
amizade, paciência, pelo incentivo, críticas construtivas, análise e revisão do texto,
bem como, pelo apoio durante o desenvolvimento desta dissertação.
Ao IFPB – Instituto Federal de Educação, Ciência e Tecnológica pela
oportunidade de poder realizar o curso de Tecnologia em Automação Industrial e
pelos conhecimentos transmitidos.
Ao PPGEE/UFPB por oferecer um curso de Mestrado que visa o
desenvolvimento tecnológico da Paraíba e do Brasil.
Ao coordenador Prof.Dr. Fabiano Salvadori, pela tamanha dedicação ao
nosso curso.
Aos demais professores do PPGEE/UFPB.
Ao meu pastor (Mazinho) da igreja IBB (Igreja Batista nos Bancários) pelo
apoio espiritual, orações e ensinamentos.
À minha noiva Thaysa Kelly pela paciência nos momentos difíceis, pelo
apoio, incentivo, dedicação e compreensão.

Aos meus companheiros do mestrado: Gennisson, Tarcizio, Marcos,
Robson, Júlio, Roberto, Edson e Jeanne pelo apoio e pela verdadeiro
companherismo. Deus abençoe vocês.
A todos que compõem o laboratório Lasea/UFPB, pela troca de
conhecimento e experiências.
À todos que de alguma forma contribuíram na execução deste trabalho.

SUMÁRIO
LISTA DE ILUSTRAÇÕES............................................................................. X
LISTA DE SÍMBOLOS.................................................................................... XV
LISTA DE SIGLAS.......................................................................................... XVI
RESUMO......................................................................................................... XVII
ABSTRACT..................................................................................................... XVIII
1 INTRODUÇÃO.................................................................................. 19
1.1 OBJETIVO GERAL............................................................................ 21
1.2 OBJETIVOS ESPECÍFICOS............................................................. 22
1.3 ORGANIZAÇÃO DO TRABALHO..................................................... 22
2 REVISÃO BIBLIOGRÁFICA............................................................ 23
2.1 PIEZOELETRICIDADE...................................................................... 24
2.1.1 CIRCUITOS ELÉTRICOS EQUIVALENTES..................................... 30
2.2 FUNDAMENTAÇÃO MECÂNICA...................................................... 32
2.2.1 VIBRAÇÃO MECÂNICA.................................................................... 32
2.2.2 FORÇA, TENSÃO E DEFORMAÇÃO MECÂNICA............................ 33
2.2.3 OBTENÇÃO DOS VALORES DE DEFORMAÇÃO DA VIGA COM
PZT....................................................................................................
35
2.3 PROPOSTAS DE CAPTAÇÃO DE ENERGIA UTILIZANDO
MATERIAIS PIEZOELÉTRICOS........................................................
38
2.4 MODELAGEM COMPUTACIONAL DO EFEITO PIEZOELÉTRICO. 47
3 MATERIAIS E MÉTODOS................................................................. 54
3.1 INTRODUÇÃO................................................................................... 55
3.2 MODELO NÚMERICO VIA MEF....................................................... 55
3.2.1 ANÁLISE MODAL............................................................................. 58
3.2.2 ANÁLISE HARMÔNICA..................................................................... 61
3.3 DESENVOLVIMENTO DE UMA ESTRUTURA PARA ENSAIOS..... 63
3.3.1 ACOPLAMENTO DO PZT A VIGA.................................................... 64
3.4 SISTEMA DE MEDIÇÃO DA DEFORMAÇÃO DA ESTRUTURA...... 65
3.5 OBTENÇÃO DA TENSÃO E DA POTÊNCIA ELÉTRICA
FORNECIDA PELO ELEMENTO PIEZOELÉTRICO EM FUNÇÃO
DA DEFORMAÇÃO SOFRIDA NA ESTRUTURA.............................
67
3.6 AJUSTE DO MODELO NUMÉRICO.................................................. 68
4 RESULTADOS E DISCUSSÃO......................................................... 70
4.1 ANÁLISE MODAL.............................................................................. 71
4.1.1 COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O MÉTODO
ANALÍTICO........................................................................................
71
4.1.2 COMPARAÇÃO ENTRE O ELEMENTO SHELL93 E O METODO
ANALÍTICO........................................................................................
73
4.1.3 COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O ELEMENTO
SHELL93............................................................................................
75
4.1.4 ANALISE MODAL DA VIGA COM O PZT.......................................... 78
4.2 ANÁLISE HARMÔNICA..................................................................... 80
4.2.1 ANÁLISE HARMÔNICA PARA A VIGA SEM O PZT......................... 80
4.2.2 ANÁLISE HARMÔNICA PARA A VIGA COM O PZT........................ 81
4.3 RESULTADOS EXPERIMENTAIS..................................................... 84
4.3.1 COMPORTAMENTO ELÁSTICO DA VIGA COM PZT................. 84
4.3.2 IDENTIFICAÇÃO DA FREQUÊNCIA NATURAL DA ESTRUTURA
EXPERIMENTAL...............................................................................
86
4.3.3 COMPORTAMENTO ELETROMECÂNICO....................................... 88
4.4 AJUSTE DO MODELO NÚMERICO.................................................. 95
5 CONCLUSÕES.................................................................................. 100
5.1 SUGESTÕES DE TRABALHOS FUTUROS...................................... 102
REFERÊNCIAS............................................................................................... 104
APÊNDICE 1 - ANÁLISE MODAL PARA A VIGA UTILIZANDO
ELEMENTO BEAM3...........................................................
108
APÊNDICE 2 - ANÁLISE MODAL PARA A VIGA UTILIZANDO
ELEMENTO SHELL93........................................................
110
APÊNDICE 3 - ANÁLISE MODAL PARA A VIGA COM O PZT
FIXADO..............................................................................
113
APÊNDICE 4 - ANÁLISE HARMÔNICA PARA A VIGA............................. 117

APÊNDICE 5 - ANÁLISE HARMÔNICA PARA A VIGA COM O PZT
FIXADO...............................................................................
120
APÊNDICE 6 - RESULTADOS EXPERIMENTAIS PARA AS DEMAIS
FREQUÊNCIAS...................................................................
124
APÊNDICE 7 - ANÁLISE TRANSIENTE APÓS AJUSTE........................... 132
ANEXO 1 - PROCESSO DE COLAGEM DO PZT NA VIGA DE
ALUMÍNIO..........................................................................
136
ANEXO 2 - PROCESSOS PARA FIXAÇÃO DOS EXTENSÔMETROS 138
ANEXO 3 - CIRCUITO AMPLIFICADOR DE SINAL BASEADO NO
AMPLIFICADOR DE INSTRUMENTAÇÃO INA122P.........
140
LISTA DE ILUSTRAÇÕES
FIGURA 1 - REAÇÃO DE POLARIZAÇÃO DE UM PIEZOELETRICO QUANDO SUBMETIDO A UMA TENSÃO MECÂNICA......
28
FIGURA 2 - DIREÇÕES DE POLARIZAÇÃO E DEFORMAÇÃO DE UMA PLACA PIEZOELÉTRICA RETANGULAR.................
28
FIGURA 3 - MODOS DE OPERAÇÃO DE UM ELEMENTO PIEZOELÉTRICO.................................................................
29
FIGURA 4 - DISPOSIÇÃO ATÔMICA E POLARIZAÇÃO RESULTANTE......................................................................
29
FIGURA 5 - CIRCUITO ELÉTRICO EQUIVALENTE DE UM SENSOR PIEZOELÉTRICO.................................................................
30
FIGURA 6 - CIRCUITO ELÉTRICO EQUIVALENTE DE UM PIEZOELÉTRICO COM UMA CARGA ACOPLADA...........
31
FIGURA 7 - VIGA ENGASTADA COM QUATRO EXTENSÔMETROS. 35
FIGURA 8 - DISPOSIÇÕES DOS STRAINS GAUGES NUMA PONTE DE WHEATSTONE...............................................................
37
FIGURA 9 - FLUXO DE ENERGIA........................................................... 39
FIGURA 10- TOPOLOGIA DAS INTERFACES UTILIZADAS. (A)RSD. (B)P-SSHI. (C)S-SSHI..........................................................
39
FIGURA 11- EXEMPLO DE APARATO EXPERIMENTAL PARA COLHEITA DE ENERGIA....................................................
40
FIGURA 12- RESULTADOS TEORICOS E EXPERIMENTAIS UTILIZANDO DIFERENTES INTERFACES. (A)RSD. (B)P-SSHI. (C)S-SSHI..........................................................
41
FIGURA 13- TECNICAS DE COMPRESSÃO SOBRE UM PZT.(A)GRADUAL.(B)ÚNICO IMPACTO............................
41
FIGURA 14- RELAÇÃO ENTRE A ÁREA TRANSVERSAL E A ESPESSURA DO MATERIAL PIEZOELETRICO................
42
FIGURA 15- SEÇÃO TRANSVERSAL DO GERADOR............................ 43
FIGURA 16- FLUXOGRAMA DE UTILIZAÇÃO DO APARATO INSTRUMENTAL..................................................................
43
FIGURA 17- RELAÇÃO DA POTENCIA E TENSÃO ELÉTRICA EM FUNÇÃO DA CARGA RESISTIVA......................................
44

FIGURA 18- (A)DESENHO ESQUEMÁTICO DO PZT EM FORMA DE S. (B) VISTA SUPERIOR DO DISPOSITO..........................
44
FIGURA 19- (A) IDEIA CONCEITUAL DE UM PZT FIXADO EM UM TECIDO. (B) APLICAÇÃO DO PROTOTIPO NAS ARTICULAÇÕES DOS DEDOS E COTOVELOS................
45
FIGURA 20- APARATO INSTRUMENTAL............................................... 46
FIGURA 21- PROTOTIPO DESENVOLVIDO PARA COLHEITA DA ENERGIA ELÉTRICA A PARTIR DA FORÇA DO VENTO..................................................................................
47
FIGURA 22- MODELO DESENVOLVIDO CONECTADO A UMA CARGA RESISTIVA.............................................................
48
FIGURA 23- DISTRIBUIÇÃO DA DEFORMAÇÃO AO LONGO DA SUPERFICIE DAS VIGAS.(A)RETANGULAR. (B)TRAPEZOIDAL.(C)VIGA TRIANGULAR........................
50
FIGURA 24- ESTRUTURA UTILIZANDO DOIS BLOCOS DE MASSA. (A)PERSPECTIVA LATERAL. (C)VISÃO EXTERNA.........
51
FIGURA 25- OS DOIS PRIMEIROS MODOS DE VIBRAÇÃO OBTIDAS ATRAVÉS DE SIMULAÇÃO BASEADAS NO METODO DE ELEMENTOS FINITOS...................................................
51
FIGURA 26- DIAGRAMA DO APARATO INSTRUMENTAL.................... 52
FIGURA 27- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO SHELL93.............................................
56
FIGURA 28- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO SOLID226...........................................
58
FIGURA 29- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO BEAM3................................................
59
FIGURA 30- CONFIGURAÇÃO ENTRE A VIGA DE ALUMÍNIO E A CERÂMICA PIEZOELÉTRICA NO MODELO NUMÉRICO. VISTA LATERAL..................................................................
60
FIGURA 31- LOCALIZAÇÃO DOS NÓS ESCOLHIDOS PARA OBTENÇÃO DOS RESULTADOS.......................................
62
FIGURA 32- BANCADA EXPERIMENTAL............................................... 63
FIGURA 33- BASE METÁLICA E O BLOCO DE FIXAÇÃO DA VIGA COM PZT..............................................................................
64
FIGURA 34- PZT FIXADO NA VIGA DE ALUMÍNIO................................ 65

FIGURA 35- PONTE DE WHEASTSTONE USADA PARA MEDIÇÃO DA DEFORMAÇÃO COM OS EXTENSÔMETROS DE RESISTÊNCIA ELÉTRICA (STRAIN GAUGES)..................
66
FIGURA 36- BALANCEAMENTO DA PONTE DE WHEATSTONE COM TRIMPOT.....................................................................
66
FIGURA 37- TRÊS PRIMEIROS MODOS DE VIBRAÇÃO E AS RESPECTIVAS EQUAÇÕES PARA UMA VIGA MONOENGASTADA............................................................
72
FIGURA 38- ILUSTRAÇÃO DOS TRÊS PRIMEIROS MODOS DE VIBRAÇÃO DA VIGA ESTUDADA OBTIDOS NO ANSYS..................................................................................
73
FIGURA 39- QUATRO MODOS INICIAIS DE VIBRAÇÃO OBTIDOS COM O ELEMENTO SHELL93............................................
74
FIGURA 40- REFINO DA MALHA DE ELEMENTOS COM A UTILIZAÇÃO DO SHELL93.................................................
76
FIGURA 41- MALHAS DE ELEMENTOS FINITOS PARA A VIGA COM O PZT....................................................................................
78
FIGURA 42- MODOS DE VIBRAÇÃO DA VIGA COM O PZT FIXADO. 79
FIGURA 43- LOCALIZAÇÃO DOS NÓS ESCOLHIDOS PARA A ANÁLISE HARMÔNICA.......................................................
81
FIGURA 44- ESQUEMÁTICO PARA IDENTIFICAÇÃO DA FREQUÊNCIA NATURAL....................................................
86
GRÁFICO 1- COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA EM FUNÇÃO DA FREQUÊNCIA................................................
80
GRÁFICO 2- COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA NA VIGA EM FUNÇÃO DA FREQUÊNCIA......................................................................
82
GRÁFICO 3- COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA NO PZT EM FUNÇÃO DA FREQUÊNCIA......................................................................
82
GRÁFICO 4- RELAÇÃO LINEAR ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT.......................................................................................
83
GRÁFICO 5- CURVA CARACTERISTICA DA DEFORMAÇÃO ELÁSTICA DA VIGA COM PZT..........................................
85
GRÁFICO 6- RESPOSTA NATURAL DA ESTRUTURA COM

ELEMENTO EXCITADOR.................................................... 87
GRÁFICO 7- RESPOSTA NATURAL DA ESTRUTURA SEM O ELEMENTO EXCITADOR....................................................
87
GRÁFICO 8- COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA, EM ABERTO, NO PZT EM FUNÇÃO DA FREQUÊNCIA................................................
88
GRÁFICO 9- COMPORTAMENTO DA IMPEDÂNCIA E TENSÃO ELÉTRICA RMS FORNECIDA EM FUNÇÃO DA FREQUÊNCIA......................................................................
89
GRÁFICO 10- COMPORTAMENTO DA POTÊNCIA ELÉTRICA RMS FORNECIDA E DA DEFORMAÇÃO ELÁSTICA EM FUNÇÃO DA FREQUÊNCIA................................................
90
GRÁFICO 11- COMPORTAMENTO DA POTÊNCIA ELÉTRICA RMS E DA TENSÃO ELÉTRICA EM FUNÇÃO DA FREQUÊNCIA......................................................................
91
GRÁFICO 12- RELAÇÃO ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT NA FAIXA DE FREQUÊNCIA DE 20 A 75 HZ.............................................
92
GRÁFICO 13- RELAÇÃO ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT NA FAIXA DE FREQUÊNCIA DE 75 A 120 HZ...........................................
93
GRÁFICO 14- SINAIS DE TENSÃO E DEFORMAÇÃO ELÁSTICA OBTIDAS EXPERIMENTALMENTE PARA A FREQUÊNCIA DE 75 HZ......................................................
93
GRÁFICO 15- COMPARAÇÃO ENTRE AS AMPLITUDES DOS SINAIS DE TENSÃO (A) E DEFORMAÇÃO ELÁSTICA (B) APÓS AJUSTE DO MODELO NÚMERICO....................................
96
GRÁFICO 16- COMPARAÇÃO ENTRE AS AMPLITUDES DOS SINAIS E TENSÃO E DEFORMAÇÃO ELÁSTICA APÓS EXTRAPOLAÇÃO DO MODELO NÚMERICO AJUSTADO..........................................................................
97
TABELA 1- DISTRIBUIÇÃO DA DEFORMAÇÃO NAS DUAS VIGAS (µm/m)..................................................................................
53
TABELA 2- DIMENSÕES E PROPRIEDADES DO MATERIAL DA VIGA DE ALUMÍNIO.............................................................
59
TABELA 3- MARCA E MODELO DOS EQUIPAMENTOS UTILIZADOS.........................................................................
63

TABELA 4- PROPRIEDADES PIEZO-CERÂMICAS DO PZT-C64......... 65
TABELA 5- COMPARAÇÃO ENTRE O MÉTODO ANALITICO E O ELEMENTO BEAM3 NA DETERMINAÇÃO DA FREQUÊNCIA NATURAL....................................................
72
TABELA 6- COMPARAÇÃO ENTRE O MÉTODO ANALITICO E O ELEMENTO SHELL93.........................................................
74
TABELA 7- COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O ELEMENTO SHELL93.........................................................
76
TABELA 8- COMPARAÇÃO ENTRE AS FREQUÊNCIAS NATURAIS............................................................................
79
TABELA 9- MASSAS UTILIZADAS E AS RESPECTIVAS DEFORMAÇÕES..................................................................
85
TABELA 10- RESULTADOS EXPERIMETAIS OBTIDOS........................ 91
TABELA 11- COMPARAÇÃO ENTRE OS PARAMETROS DO PZT ANTES E DEPOIS DO AJUSTE..........................................
95
TABELA 12- COMPARAÇÃO ENTRE OS RESULTADOS APRESENTADOS PARA O MODELO AJUSTADO E EXTRAPOLAÇÕES COM OS DADOS EXPERIMENTAIS DE DEFORMAÇÃO..............................................................
97
TABELA 13- COMPARAÇÃO ENTRE OS RESULTADOS APRESENTADOS PARA O MODELO AJUSTADO E EXTRAPOLAÇÕES COM OS DADOS EXPERIMENTAIS DE TENSÃO ELÉTRICA......................................................
97

LISTA DE SÍMBOLOS
A Comprimento m
B Largura m
D Vetor de deslocamento elétrico N/m
d Coeficiente piezoelétrico de deformação m/V
E, Y Módulo de Elasticidade do Material (Módulo Young) N/m2,GPa
E1 Campo elétrico V/m
F Força N
f Frequência Hz
g Aceleração da gravidade m/s²
H Espessura m
I Momento de Inércia m4
L Comprimento m
m Massa por unidade de comprimento Kg/m
Ρ Densidade Kg/m³
S, ε Deformação mecânica Adim
S Propriedades elásticas N/m²
V Coeficiente de Poisson Adim
V Tensão elétrica V
W Potência elétrica W
σ Tensão mecânica N/m², Pa
εo Constante dielétrico F/m
ω Frequência angular rad/s

LISTA DE SIGLAS
PZT Titanato zirconato de chumbo
PVDF Polifluoreto de vinilideno
MEMS Micro Sistemas Eletro-Mecânicos

RESUMO
ANÁLISE E CARACTERIZAÇÃO DA POTÊNCIA GERADA COM ELEMENTO
PIEZOELÉTRICO
Este trabalho apresenta um estudo de caracterização de um elemento piezoelétrico para geração de energia elétrica. Essa caracterização permitiu a determinação da relação entre a deformação mecânica sofrida pelo elemento gerador (piezoelétrico) e a potência elétrica gerada. Os resultados obtidos pelo estudo foram baseados em simulações utilizando um programa de elementos finitos (Ansys) e em dados experimentais. Como elemento piezoelétrico gerador foi utilizada a cerâmica piezoelétrica de Zirconato Titanato de Chumbo (PZT). Para a obtenção dos resultados experimentais, foi desenvolvido um gerador composto por uma viga monoengastada excitada por um shaker (excitador) nas frequências de interesse. Com a utilização deste gerador foi possível constatar que a máxima geração de tensão e potência elétrica ocorreu na frequência de 75 Hz. Para uma carga de 19,69 kΩ, que dividiu, a tensão elétrica gerada em circuito aberto, pela metade na frequência de 75 Hz, foi fornecida uma potência elétrica de 1,877 mW para uma deformação de 387,97 µm/m sobre o PZT. Para esta frequência, os resultados obtidos de deformação elástica e tensão elétrica nas simulações, se mostraram equivalentes aos alcançados no experimento. Palavras-Chaves: Materiais piezoelétricos, Captação de Energia, Geração de Energia Elétrica, PZT, Vibração Mecânica.

ABSTRACT
ANALYSIS AND CHARACTERIZATION OF THE ELECTRIC POWER GENERATED
WITH A PIEZOELECTRIC ELEMENT
This work presents a characterization study of a piezoelectric element for generating electricity. This characterization allowed the determination of the relationship between mechanical deformation experienced by the element generator (piezoelectric) and the electric power generated. The results of the study were based on simulations using a finite element program (ANSYS) and experimental data. Was used the ceramic Lead Zirconate Titanate (PZT) as the piezoelectric element of the generator. We developed a generator comprised of a basic cantilever beam excited by a shaker (exciter) at the frequencies of interest. With the use of this generator, it was established that the maximum voltage generation and electrical power occurred at a frequency of 75 Hz. For a load of 19.69 kΩ, which divided the voltage generated under no load condition by half at the frequency of 75 Hz, it was provided an electric power of 1,877 mW for a deformation of 387,97 µm/m on the PZT. For this frequency, the results of elastic deformation and voltage in the simulations, showed to be equivalent to those achieved in the experiment.
Key Words: Piezoelectric materials, Power Harvesting, Electric Power Generation, PZT, Mechanical Vibration

1 INTRODUÇÃO

INTRODUÇÃO
20
INTRODUÇÃO
É notório que o ser humano é dependente da eletricidade e cada vez mais
de tecnologias que demandam recursos energéticos. A relevância deste fato decorre
de que os recursos naturais utilizados para geração desta energia são cada vez
mais escassos, como por exemplo, o petróleo. Uma alternativa frente a este desafio
é utilizar novos métodos de geração de energia elétrica e projetar novos sistemas,
componentes e equipamentos, que utilizem cada vez menos potência elétrica ou que
consigam de alguma maneira gerar sua própria energia de forma autônoma. Dentro
deste contexto, o estudo e a aplicação das fontes de energia alternativas e
renováveis têm grande importância.
Existem diversas técnicas de exploração de energia a partir de fontes
limpas, que consistem em captar a energia disponível no ambiente, normalmente
energia cinética (vento, ondas, gravitacional, vibrações), energia química
(biocombustíveis, biomassa), energia térmica (solar-térmica, geotérmica, gradientes
de temperatura, combustão), energia eletromagnética (fotovoltaica, radiofrequência,
campo magnético) ou mesmo energia atômica (nuclear, decaimento radioativo) e
transformá-la em energia elétrica GONÇALVES(2011). A utilização de parques
eólicos ou fotovoltaicos, por exemplo, possibilitam a captação para aplicação de
grande porte, contudo com a evolução de novas tecnologias a tendência é para a
miniaturização e mobilidade, necessitando de pequenos sistemas de captação de
energia (STARNER e PARADISO,2004). Com o surgimento dos dispositivos móveis
(como celulares, mp3 player, computadores pórtatéis etc), foi necessário o
desenvolvimento de fontes móveis de energia, e com isso, o conceito de “colheita de
energia” surgiu como alternativa para o fornecimento deste tipo de energia. Dentro
das possibilidades, pode-se captar e transformar, por exemplo, a energia mecânica
que equipamentos fornecem ao meio ambiente em energia elétrica, podendo esta
energia ser armazenada em baterias ou diretamente consumida.
Uma das maneiras de captar energia mecânica se dá na forma de vibração e
deformação, onde mecanismos podem ser desenvolvidos para produção de alguns
miliwatts a partir destes eventos. Como exemplo, podem ser citados mecanismos
que utilizam alguns materiais, como os piezoelétricos. Estes materiais possuem a
característica de gerar tensões elétricas ao sofrer deformações mecânicas, e de

INTRODUÇÃO
21
forma inversa, sofrer deformações mecânicas ao serem submetidos a uma diferença
de potencial. Como estas são características intrínsecas do material, este fenômeno
se torna promissor frente a esta necessidade de se desenvolver novas formas de
geração de energia elétrica (BALLATO, 1995).
Diversos são os tipos de materiais piezoelétricos e, dentre estes, podem ser
destacados os cristais de quartzo, o niobato de lítio, algumas cerâmicas como o
titanato-zirconato de chumbo (PZT) e o titanato de bário, assim como os polímeros
de floureto de polivinilideno (MENEZES, 2009).
Diante de tamanha diversidade, sendo cada um desses diferentes em termos
de estrutura cristalina e propriedades, é necessário a realização de pesquisas que
analisem e caracterizem esses materiais, a fim de se obter a máxima produção de
energia elétrica em função de outras energias normalmente desperdiçadas ou
dissipadas no ambiente.
Segundo Andrade (2008) os PZT’s apresentam grande rigidez, na ordem de
70 GPa, possuem pequeno volume, são leves e de baixo custo, como também
podem ser confeccionados em varias formas e modelos.
Diante do exposto, esta pesquisa tem por objetivo analisar a tensão elétrica
gerada por um elemento de PZT em função da deformação elástica usando
simulação baseada em elementos finitos e coletando resultados experimentais
através de uma estrutura mecânica vibratória. Em consonância com o
desenvolvimento das simulações foi construído o protótipo experimental para
obtenção dos resultados práticos a serem comparados com os resultados simulados.
1.1 OBJETIVO GERAL
Este trabalho tem por objetivo analisar e caracterizar um gerador
piezoelétrico, relacionando a potência elétrica gerada com a deformação imposta no
elemento piezoelétrico proveniente de vibração mecânica forçada.
INTRODUÇÃO
22
1.2 OBJETIVOS ESPECÍFICOS
São objetivos específicos alcançados ao longo do trabalho:
Realizar análise modal, harmônica e transiente do gerador piezoelétrico, com
simulações usando elementos finitos;
Obter, com auxilio das simulações, os valores de deformação elástica e tensão
elétrica;
Desenvolver um protótipo experimental para coleta de resultados experimentais;
Com os resultados experimentais comparar e ajustar o modelo numérico para
possíveis extrapolações.
1.3 ORGANIZAÇÃO DO TRABALHO
O presente trabalho está organizado da seguinte maneira:
No primeiro capítulo, é apresentada uma introdução na qual são expostos os
principais motivos deste trabalho;
No segundo capítulo, é feita uma revisão da literatura baseada em trabalhos
publicados sobre o assunto;
No terceiro capítulo, serão apresentados os materiais e métodos utilizados para o
desenvolvimento da pesquisa;
No quarto capítulo, serão mostrados os resultados obtidos, assim como serão
discutidos e analisados estes resultados.
Por fim, no quinto capitulo, serão apresentadas as conclusões dos resultados
alcançados e as sugestões para trabalhos futuros.
2 REVISÃO BIBLIOGRÁFICA

REVISÃO BIBLIOGRÁFICA
24
REVISÃO BIBLIOGRÁFICA
2.1 PIEZOELETRICIDADE
A palavra piezoeletricidade é de origem grega e significa “eletricidade por
pressão”. Este nome foi proposto por Hankel em 1881 para nomear o fenômeno
descoberto pelos irmãos Pierre e Jacques Curie os quais observaram que cargas
positivas e negativas apareciam em diversos locais das superfícies dos cristais de
quartzo, quando estes eram comprimidos em diferentes direções (VIVES, 2008.;
KATZIR, 2006).
Outra definição aborda a piezoeletricidade como a capacidade que
determinados materiais possuem de gerar uma polarização elétrica quando
submetidos a uma deformação mecânica (BALLATO, 1995). Associada a essa
polarização elétrica, o elemento envolvido desenvolverá um campo elétrico no seu
interior e uma tensão elétrica poderá ser mensurada entre seus terminais.
Inversamente a esse fenômeno (o qual estabelece o efeito piezoelétrico inverso), se
o material for submetido a um campo elétrico externo, uma deformação mecânica
será gerada e suas dimensões serão alteradas.
Com o desenvolvimento das pesquisas nessa área, são evidenciados os
materiais que possuem melhores respostas à característica piezoelétrica, inclusive
com maior estabilidade em relação a variações de temperatura e umidade, podendo
ser destacadas as cerâmicas piezoelétricas de titanato zirconato de chumbo (PZT), o
titanato de bário (BaTiO3) e o titanato de chumbo (PbTiO2) ( MENEZES, 2009).
Os materiais piezoelétricos são divididos em:
Monocristalinos: Quartzo e Sal de Rochelle
Policristalinos: Titanato Zirconato de chumbo (PZT)
Polímeros: Polifluoreto de vinilideno (PVDF)
Metais: Metais a base de platina com nanoporos
De maneira geral, o efeito piezoelétrico pode ser definido como a conversão
de energia mecânica em energia elétrica (modo direto) ou a conversão de energia

REVISÃO BIBLIOGRÁFICA
25
elétrica em energia mecânica (modo inverso). Assim, um sistema piezoelétrico é
constituído de dois sistemas físicos acoplados; o mecânico e o elétrico
(MOHEIMANI, et al., 2006).
Segundo Souto(2008), o efeito piezoelétrico, considerando o material linear,
pode ser descrito de forma simplificada pelas Equações 2.1 e 2.2 nos quais são
utilizadas a notação matricial para representá-lo. A primeira equação descreve o
modo direto e a segunda descreve o modo inverso de conversão de energias, onde
D (N/m) é o vetor de deslocamento elétrico, d (m/V) é o tensor dos coeficientes
piezoelétricos de deformação (acoplamento das equações mecânica e elétrica
devido ao efeito piezoelétrico), σ (N/m²) a tensão mecânica, ε (F/m) é o tensor dos
coeficientes dielétricos medidos a tensão constante, E1 (V/m) é o vetor campo
elétrico, S (N/m²) é o tensor das deformações e s as propriedades elásticas
(MAIO,2011).
É importante notar que o efeito piezoelétrico apresenta uma dependência
linear da deformação com o campo elétrico aplicado, de forma que, se o sentido do
campo elétrico é invertido, o sentido da deformação também o será.
D = dσ +εE1 (2.1)
S = sσ + dE1 (2.2)
As Equações 2.3, 2.4 e 2.5 representam as propriedades dielétricas,
piezoelétricas e mecânicas para elementos piezoelétricos (MALLIK et al., 2005).
Dependendo do material piezoelétrico, essas matrizes são preenchidas de formas
diferentes.
333231
232221
131211
(2.3)
363534333231
262524232221
161514131211
dddddd
dddddd
dddddd
d (2.4)

REVISÃO BIBLIOGRÁFICA
26
565554535251
464544434241
363534333231
262524232221
161514131211
ssssss
ssssss
ssssss
ssssss
ssssss
s (2.5)
Conforme SAKAMOTO (2006), a deformação mecânica S é uma medida do
deslocamento relativo de partículas, portanto é uma grandeza adimensional. A
deformação mecânica é um tensor de segunda ordem simétrico e que pode ser
representado de forma matricial.
333231
232221
131211
SSS
SSS
SSS
S (2.6)
Semelhantemente à deformação, a tensão mecânica também é um tensor de
segunda ordem simétrico cuja dimensão é de força por unidade de área (N/m2).
Segundo SAKAMOTO (2006), este tensor é simétrico quando o meio está em
equilíbrio de rotação, ou seja, com torque externo nulo e que pode ser representado
em forma matricial.
333231
232221
131211
(2.7)
Por se tratar de tensores simétricos, as ordens das matrizes podem ser
reduzidas por meio das notações de Voigt. Associando os índices (11) → 1, (22) →
2, (33) → 3, (23) → 4, (13) → 5, (12) → 6, tem-se que, para o tensor de deformação
mecânica, S11 = S1, S22 = S2, S33 = S3, S23 = S4, S13 = S5, e S12 = S6, e
semelhantemente, σ11 = σ 1, σ 22 = σ 2, σ 33 = σ 3, σ 23 = σ 4, σ 13 = σ 5, e σ 12 = σ 6, para
o tensor da tensão mecânica . Assim, pode-se reescrever as matrizes de

REVISÃO BIBLIOGRÁFICA
27
deformação [S] e de tensão mecânica [σ] na notação matricial reduzida, conforme
apresentadas pelas equações 2.8 e 2.9:
6
5
4
3
2
1
S
S
S
S
S
S
S (2.8)
6
5
4
3
2
1
(2.9)
Segundo Maio (2011), quando um material piezoeletrico é mecanicamente
deformado, ocorre uma deformação/rotação dos dipolos que originalmente estavam
alinhados, provocando o aparecimento de tensão elétrica. Quando uma tensão
mecânica é aplicada no sentido contrário ao de polarização do elemento
piezoelétrico, provoca o aparecimento de tensão elétrica com polarização invertida.
Semelhantemente, quando uma tensão mecânica é aplicada no mesmo sentido da
polarização do elemento piezoelétrico, a tensão elétrica correspondente é gerada no
mesmo sentido da polarização. A Figura 1 mostra este efeito. Estes efeitos
possibilitam, devido a reversibilidade eletromecânica relacionada aos efeitos
piezoelétricos direto e inverso, o desenvolvimento de sensores e de atuadores para
diversas aplicações.

REVISÃO BIBLIOGRÁFICA
28
FIGURA 1 - REAÇÃO DE POLARIZAÇÃO DE UM PIEZOELETRICO QUANDO SUBMETIDO A
UMA TENSÃO MECÂNICA
(MOHEIMANI, et al., 2006 apud SOUTO,2008)
Na Figura 2 são destacadas as direções de deformações mecânicas e de
polarização elétrica de uma placa piezoelétrica retangular. Foram adotados para
representar as direções de deformação e de aplicação de tensão elétrica os índices
1-1 para o comprimento, 2-2 para a largura e 3-3 para espessura da placa
piezoelétrica (SOUTO, 2008).
FIGURA 2 - DIREÇÕES DE POLARIZAÇÃO E DEFORMAÇÃO DE UMA PLACA PIEZOELÉTRICA RETANGULAR
(Adaptada de SOUTO,2008)
Segundo GONÇALVES (2011), existem dois modos comuns no processo de
captação de energia utilizando estes materiais : o modo 33 e o modo 31. No modo
33, a direção da tensão mecânica aplicada e a tensão gerada com a polarização do
material são as mesmas, já no modo 31, a tensão mecânica é aplicada segundo um
eixo perpendicular ao da polarização. Na Figura 3, é possível observar os dois
modos citados. Já na Figura 4, é apresentada a disposição atômica e a polarização
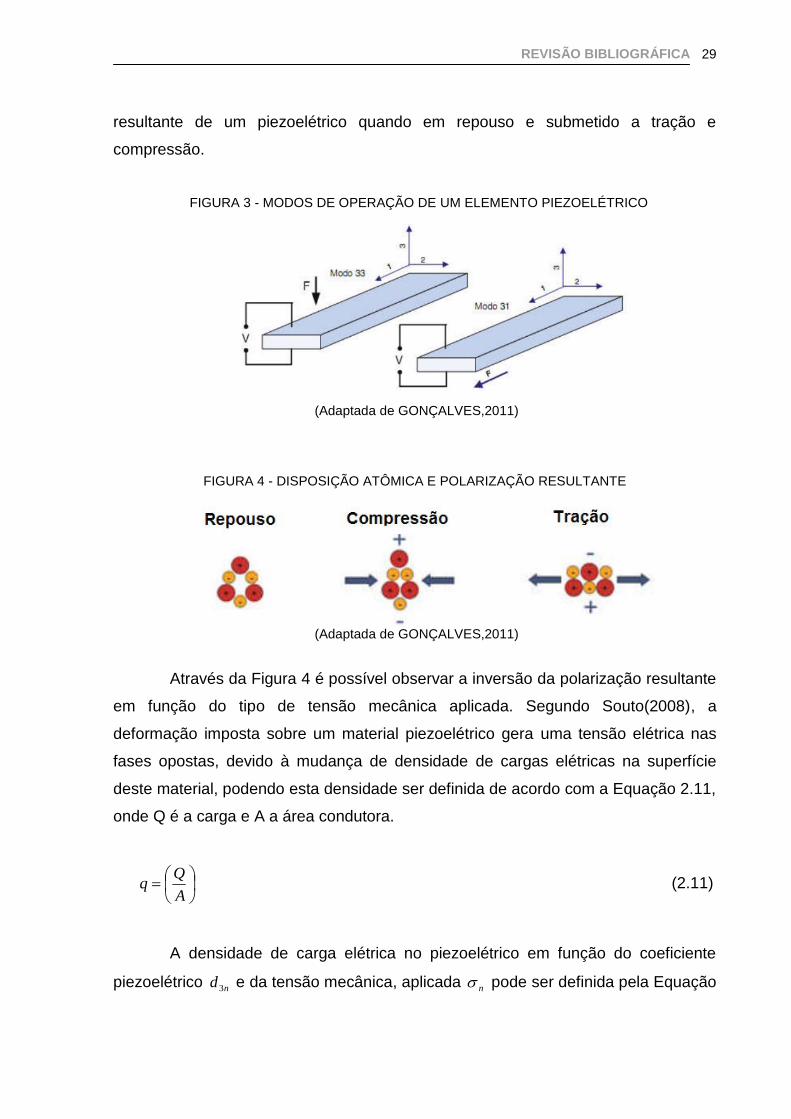
REVISÃO BIBLIOGRÁFICA
29
resultante de um piezoelétrico quando em repouso e submetido a tração e
compressão.
FIGURA 3 - MODOS DE OPERAÇÃO DE UM ELEMENTO PIEZOELÉTRICO
(Adaptada de GONÇALVES,2011)
FIGURA 4 - DISPOSIÇÃO ATÔMICA E POLARIZAÇÃO RESULTANTE
(Adaptada de GONÇALVES,2011)
Através da Figura 4 é possível observar a inversão da polarização resultante
em função do tipo de tensão mecânica aplicada. Segundo Souto(2008), a
deformação imposta sobre um material piezoelétrico gera uma tensão elétrica nas
fases opostas, devido à mudança de densidade de cargas elétricas na superfície
deste material, podendo esta densidade ser definida de acordo com a Equação 2.11,
onde Q é a carga e A a área condutora.
A
Qq (2.11)
A densidade de carga elétrica no piezoelétrico em função do coeficiente
piezoelétrico nd3 e da tensão mecânica, aplicada n pode ser definida pela Equação

REVISÃO BIBLIOGRÁFICA
30
2.12, sendo o n o número do eixo de aplicação da deformação mecânica variando
de 1 a 3.
nndq 3 (2.12)
2.1.1 CIRCUITOS ELÉTRICOS EQUIVALENTES
Segundo SOUTO (2008), quando um equipamento é conectado a um
elemento piezoelétrico, é necessário considerar as propriedades elétricas deste
elemento, podendo-se destacar a sua capacitância. Quando duas placas condutoras
estão dispostas paralelamente, possibilitam que o componente adquira habilidade de
armazenar cargas elétricas. A equação 2.13 define a capacitância, sendo esta
diretamente proporcional à permissividade e à área A, e inversamente
proporcional ao espaçamento entre as placas condutoras. (MARKUS,2001)
d
AC (2.13)
Na Figura 5, é possível observar o circuito equivalente do elemento
piezoelétrico atuando como sensor, consistindo em um gerador de tensão elétrica
(Vg) em série com um capacitor (Cp). A tensão Vg é diretamente proporcional ao
estímulo de pressão ou de deformação aplicada ao piezoelétrico.
FIGURA 5 CIRCUITO ELÉTRICO EQUIVALENTE DE UM SENSOR PIEZOELÉTRICO
(Adaptada de SOUTO,2008)
REVISÃO BIBLIOGRÁFICA
31
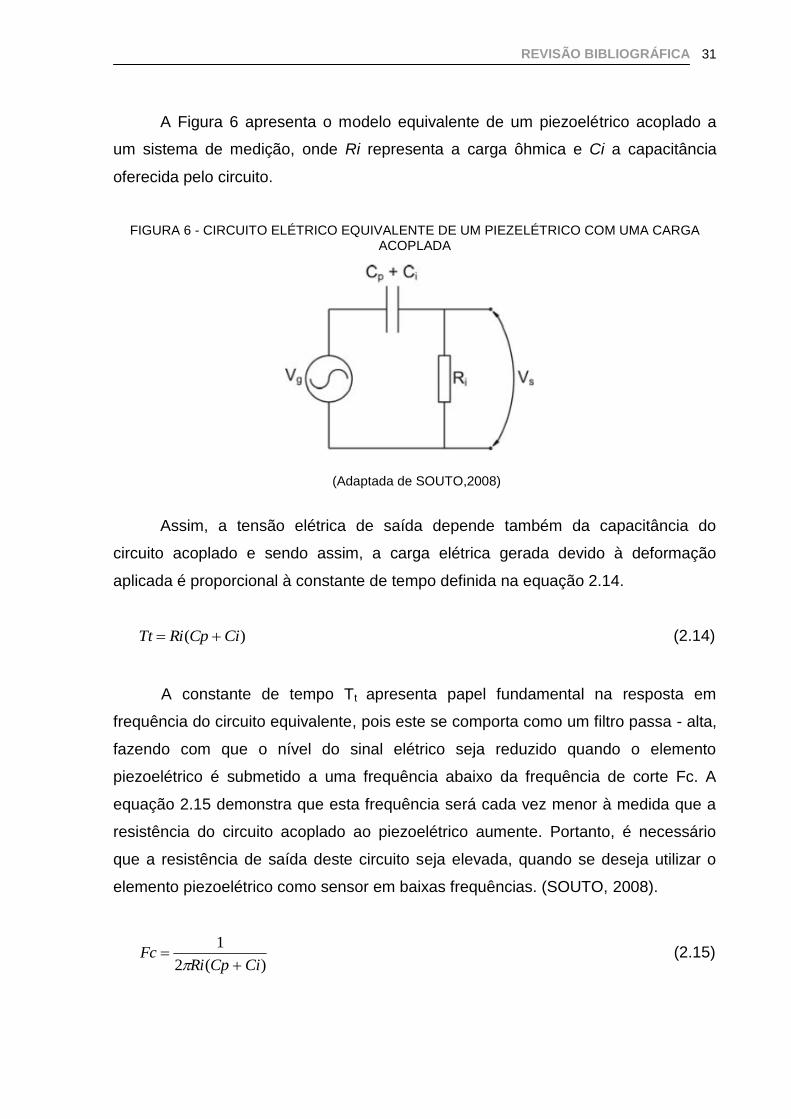
A Figura 6 apresenta o modelo equivalente de um piezoelétrico acoplado a
um sistema de medição, onde Ri representa a carga ôhmica e Ci a capacitância
oferecida pelo circuito.
FIGURA 6 - CIRCUITO ELÉTRICO EQUIVALENTE DE UM PIEZELÉTRICO COM UMA CARGA ACOPLADA
(Adaptada de SOUTO,2008)
Assim, a tensão elétrica de saída depende também da capacitância do
circuito acoplado e sendo assim, a carga elétrica gerada devido à deformação
aplicada é proporcional à constante de tempo definida na equação 2.14.
)( CiCpRiTt (2.14)
A constante de tempo Tt apresenta papel fundamental na resposta em
frequência do circuito equivalente, pois este se comporta como um filtro passa - alta,
fazendo com que o nível do sinal elétrico seja reduzido quando o elemento
piezoelétrico é submetido a uma frequência abaixo da frequência de corte Fc. A
equação 2.15 demonstra que esta frequência será cada vez menor à medida que a
resistência do circuito acoplado ao piezoelétrico aumente. Portanto, é necessário
que a resistência de saída deste circuito seja elevada, quando se deseja utilizar o
elemento piezoelétrico como sensor em baixas frequências. (SOUTO, 2008).
)(2
1
CiCpRiFc
(2.15)

REVISÃO BIBLIOGRÁFICA
32
2.2 FUNDAMENTAÇÃO MECÂNICA
Nesta seção, serão abordados os conceitos fundamentais de vibração
mecânica e de deformação mecânica apresentados na teoria clássica os quais serão
utilizados nesta pesquisa.
2.2.1 VIBRAÇÃO MECÂNICA
Uma forma perceptível da energia mecânica é a vibração, sendo definida
como um movimento repetitivo de um sistema em determinado intervalo de tempo e
é caracterizada, segundo BALBINOT e BRUSAMARELLO (2011), através dos
seguintes parâmetros mensuráveis: aceleração, velocidade, deslocamento,
frequência, amortecimento e tensão mecânica e pode ser classificada, segundo
SETO(1971) em: vibração livre, sendo este um movimento periódico que se observa
quando o sistema é deslocado da sua posição de equilíbrio estático; ou em vibração
forçada, que é caracterizada pela presença de força externas sob a forma
F(t)=F0sen wt ou F(t)=F0cos wt atuando no sistema durante seu movimento de
vibração.
Segundo este mesmo autor, a vibração, em geral, é uma forma de energia
desperdiçada e indesejada em muitos casos, principalmente para máquinas
industriais, pois produz barulho, folgas e quebra de peças. O objeto de estudo desta
pesquisa não é a investigação dos efeitos adversos provocados pelas vibrações
mecânicas, mas através das deformações mecânicas impostas transformá-las em
energia elétrica.
Uma das principais propriedades de um sistema vibratório é a frequência
natural, pois quando este sistema é excitado nesta frequência ocorre a ressonância
na qual a amplitude de vibração aumente sem limite, sendo regulada apenas pelo
amortecimento do próprio sistema.
De maneira genérica, em termos geométricos e de condições de uso, as
estruturas mecânicas podem ser divididas em seis grupos: cabos, barras, vigas,
membranas, placas e cascas (NAYFEH;PAI, 2004). Nesta pesquisa, foi utilizada
uma placa piezoelétrica e uma viga metálica.

REVISÃO BIBLIOGRÁFICA
33
Devido à fragilidade do elemento piezoelétrico, foi preciso acoplá-lo a uma
estrutura que proporcionasse suporte mecânico, neste caso, sendo adotado uma
viga de alumínio retangular, onde uma das suas suas extremidades é fixa e a outra
livre, podendo ser conectada a uma fonte de vibração, por exemplo. Segundo
DEMIAN(2006), as vigas são estruturas que possuem uma dimensão (comprimento)
muito maior que as demais (largura e espessura) e que devem suportar tração,
compressão, flexão, cisalhamento transversal e carregamentos torcionais.
O motivo da utilização desta configuração na pesquisa foi por apresentar
vantagens como: a energia convertida está diretamente relacionada com a
deformação da viga, sendo esta relativamente alta para uma entrada de força, e pela
possibilidade de fabricação de dispositivos com tamanhos reduzidos.
Para a obtenção dos modos de vibração da viga adotada e as respectivas
frequências naturais associadas adotou-se o equacionamento proposto por
(Thomson, 1978), demonstrado na equação 2.16, sendo l os autovalores
associados a cada modo de vibração, E o módulo de elasticidade, I o momento de
inércia, m a massa da viga e L o seu comprimento.
4²
mL
EIln (2.16)
Com a utilização da Equação 2.17, conforme proposto por (Meirovitch, 1967)
é possível obter a frequência natural associada em função da densidade ρ do
material de composição da viga e de suas propriedades geométricas.
412
²²
L
Ehln
(2.17)
2.2.2 FORÇA, TENSÃO E DEFORMAÇÃO MECÂNICA
Em 1678, Robert Hooke estabeleceu através de seus estudos a relação entre
as tensões mecânicas e deformações de corpos quando submetidos a esforços

REVISÃO BIBLIOGRÁFICA
34
mecânicos, sendo estabelecida a lei de Hooke, demonstrada nas equações 2.18 e
2.19.
kxF (2.18)
E (2.19)
A Equação 2.18 descreve que uma força F (N) aplicada longitudinalmente
em uma mola, com rigidez k (N/m), ocasiona uma deflexão mecânica x (m). A lei de
Hooke demonstra a relação linear entre a força e a deflexão para pequenas
variações. Embora tenha sido observada em molas, essa teoria pode ser aplicada
em outros sistemas mecânicos, como por exemplo, em uma pequena viga de metal
engastada. Ao aplicarmos uma carga ocorre uma deflexão, que pode ou não ser
percebida a olho nu. Contudo, se as cargas e as deformações forem suficientemente
pequenas, esta relação também pode ser considerada linear resultando na equação
2.19, onde σ é a tensão mecânica (N/m²), a deformação percentual(%) e E o
módulo de Young ou módulo de elasticidade(N/m²) (CALLISTER, 1940).
Tensão e deformação são as versões normalizadas de força e deflexão,
onde a primeira é uma força por unidade de área e a segunda é o alongamento por
unidade de comprimento inicial (NASH, 1922). Embora a deformação seja uma
grandeza adimensional, a deformação é geralmente relacionada com microstrain
m , que equivale a uma variação de 1x10-6 m em um comprimento inicial de 1
metro. (BALBINOT E BRUSAMARELLO, 2011)
Ainda segundo estes mesmos autores, quando um material é submetido a
uma tensão mecânica, uma compressão unixial ou cisalhamento, ocorre uma
deformação elástica, até um certo valor crítico. A partir deste ponto, começa a
ocorrer uma deformação plástica. Sabe-se que durante a deformação elástica, os
átomos do material são deslocados, mas tendem a voltar para a posição de
equilíbrio quando esta tensão mecânica é removida. Em outras palavras, o material
tende a voltar ao estado anterior à aplicação destas cargas mecânicas.
Na nossa pesquisa, objetivou-se aplicar cargas que mantivessem a estrutura
mecânica dentro da região elástica para que as relações de força, tensão e
deformação permanecessem lineares.

REVISÃO BIBLIOGRÁFICA
35
2.2.3 OBTENÇÃO DOS VALORES DE DEFORMAÇÃO DA VIGA COM PZT
Uma das formas na qual se pode obter experimentalmente a deformação
sofrida por uma estrutura é utilizar elementos sensores do tipo strain gauge (SG).
Estes sensores são baseados na variação da resistência de um condutor quando
submetido a uma tensão mecânica.
Seja um resistor com comprimento l, seção transversal A e resistividade
elétrica ρ, temos sua resistência elétrica é dada por:
A
lR (2.20)
A utilização dos extensômetros como sensores de deformação é
relativamente simples, bastando apenas que os mesmos estejam bem fixados na
estrutura no qual se pretende medir esta variável. Quando os fios metálicos que
formam estes sensores são deformados mecanicamente, ocorre uma variação do
seu comprimento l, alterando o valor da sua resistência elétrica. Admitindo que os
sensores estejam bem fixados na estrutura e que a deformação seja transmitida
integralmente para os extensômetros , é possível relacionar a variação relativa da
resistência )(R
R com a deformação )( na região elástica. (BALBINOT E
BRUSAMARELLO, 2011)
Para obter os dados experimentais de deformação elástica sofrida por
estrutura do tipo viga, pode-se utilizar quatro destes sensores interconectados numa
configuração de ponte de Wheatstone, sendo dois fixados na parte inferior da viga
de alumínio na direção axial (SG2 e SG4) e dois fixados na face superior do PZT na
mesma direção (SG1 e SG3), conforme ilustrado na Figura 7.
FIGURA 7- VIGA ENGASTADA COM QUATRO EXTENSÔMETROS
(Adaptado de BALBINOT e BRUSAMARELLO, 2011)

REVISÃO BIBLIOGRÁFICA
36
Segundo Balbinot e Brusamarello(2011), um momento fletor (M) ao ser
aplicado na extremidade livre de uma viga monoengastada provoca uma tensão
longitudinal (σ). Sendo o momento de inércia (I), é obtido:
y
I
M (2.21)
Tem-se, também, que:
12
³bhI (2.22)
Considerando que y é a distância até o centro da espessura da viga, então:
2
hy (2.23)
Substituindo as equações (2.22) e (2.23) em (2.21), é alcançado:
²
6
bh
M (2.24)
Fazendo x como a distância entre o centro do extensômetro, no qual será o
ponto de medição da deformação, até o ponto da aplicação da força F, então:
xFM . (2.25)
Substituindo-se a equação (2.25) em (2.24), tem-se que:
Fbh
x
²
.6 (2.26)

REVISÃO BIBLIOGRÁFICA
37
Assumindo que não existe nenhuma força aplicada sobre a superfície da viga
e que a tensão transversal desta viga é zero e desprezando a efeito de Poisson,
onde e E, são a deformação elástica e o módulo de elasticidade, respectivamente,
é obtido:
E
(2.27)
Admitindo que um extensômetro esteja fixado a uma distância x e na direção
axial, que a deformação obtida é dada pela substituição da equação (2.26) em
(2.27). Logo:
FEbh
x
²
.6 (2.28)
Se forem colados quatros extensômetros conforme demonstrado na Figura
8, têm-se as quatros deformações locais definidas por:
FEbh
x
²
.64321 (2.29)
FIGURA 8- DISPOSIÇÕES DOS STRAINS GAUGES NUMA PONTE DE WHEATSTONE
(Adaptado de BALBINOT e BRUSAMARELLO, 2011)
Definindo que o fator gauge (K) dos extensômetros relaciona as variações
das resistências internas do sensores com a deformação relativa, têm-se que:

REVISÃO BIBLIOGRÁFICA
38
RR
K
(2.30)
Substituindo a Equação (2.29) em (2.30), tem-se que as variações relativas
dos valores das resistências dos extensômetros são:
FEbh
xK
R
R
R
R
R
R
R
R
²
.6
4
4
3
3
2
2
1
1
(2.31)
Conectando os quatros sensores conforme configuração demonstrada na
figura 2.8, a tensão de saída (Eo) é:
FEbh
xK
Ef
Eo
²
.6 (2.31)
Isolando F na equação (2.31):
EfKx
EoEbhF
.6
² (2.32)
Relacionando a força aplicada com a deformação sofrida, observa-se que
esta última depende do formato da barra que forma a viga, das medidas da área da
secção da viga (b e h), do módulo de elasticidade do material (E), da distância da
aplicação da força em relação à posição dos extensômetros (x), do fator do
extensômetro (K) e da tensão de alimentação da ponte de Wheatstone (Ef).
Embora a metodologia proposta por Balbinot e Brusamarello (2011) pudesse
relacionar diretamente o valor da deformação elástica em função da força aplicada,
foi optado pela obteção dos valores desta deformação em função da tensão de
saída da ponte (Eo), devido à presença do PZT na estrutura.
2.3 PROPOSTAS DE CAPTAÇÃO DE ENERGIA UTILIZANDO MATERIAIS
PIEZOELÉTRICOS
Como citado anteriormente, é possível obter energia elétrica a partir de fontes
de vibração mecânica utilizando materiais piezoelétricos. Segundo Liang e Liao
(2012) um sistema de colheita de energia deve se preocupar o quanto de energia é

REVISÃO BIBLIOGRÁFICA
39
eliminado e/ou utilizados para alimentar o dispositivo final, salientando que a energia
obtida é apenas uma parte da energia extraída de um sistema.
Estes autores apresentaram um fluxograma de energia de forma intuitiva
indicando as possibilidades de destino da energia elétrica a partir de uma fonte de
vibração mecânica. Através da figura 9, é possível verificar os três destinos
possíveis: 1) pode ser convertida em energia térmica (ramo G); 2) pode ser
armazenada e/ou utilizada diretamente no dispositivo final (ramo I) ou 3) retornar ao
domínio mecânico (ramo J).
FIGURA 9- FLUXO DE ENERGIA
(LIANG e LIAO, 2012)
Para verificar a potência elétrica colhida, os autores utilizaram três interfaces
eletrônicas diferentes, conforme representadas na Figura 10, no qual nomeadas
RSD, P-SSHI e S-SSHI, para a primeira, segunda e terceira configuração,
repectivamente. Para isto, foi desenvolvido um modelamento teórico confrontado
com dados experimentais.
FIGURA 10- TOPOLOGIA DAS INTERFACES UTILIZADAS. (A)RSD. (B)P-SSHI. (C)S-SSHI
(LIANG e LIAO, 2012)

REVISÃO BIBLIOGRÁFICA
40
Para obtenção dos dados experimentais, foi desenvolvido um aparato
mecânico no qual se pretendia converter a energia mecânica, através da vibração,
em energia elétrica, utilizando-se da estrutura apresentada na Figura 11.
FIGURA 11- EXEMPLO DE APARATO EXPERIMENTAL PARA COLHEITA DE ENERGIA
(LIANG e LIAO, 2012)
Esta estrutura consistia de uma viga monoengastada de alumínio sendo
conectada a um gerador de vibração (modelo 4810, Brüel & kjaer) juntamente com
um acelerômetro (modelo 4501, Brüel & kjaer) para rastrear a aceleração imposta, e
um sensor eletromagnético para detectar a velocidade relativa entre a viga e a base
a fim de sincronizar o chaveamento nas configurações P-SSHI e S-SSHI. A unidade
microcontrolada (eZ430-RF2500,Texas Instrument) tem a função de analisar este
sinal de velocidade, e gerar comandos para sincronização destes chaveamentos. O
elemento piezoelétrico (T120-AE4-602), de dimensões 49 mm(comprimento) x 24
mm(largura) x 0,508 mm(espessura), foi fixado na região engastada.
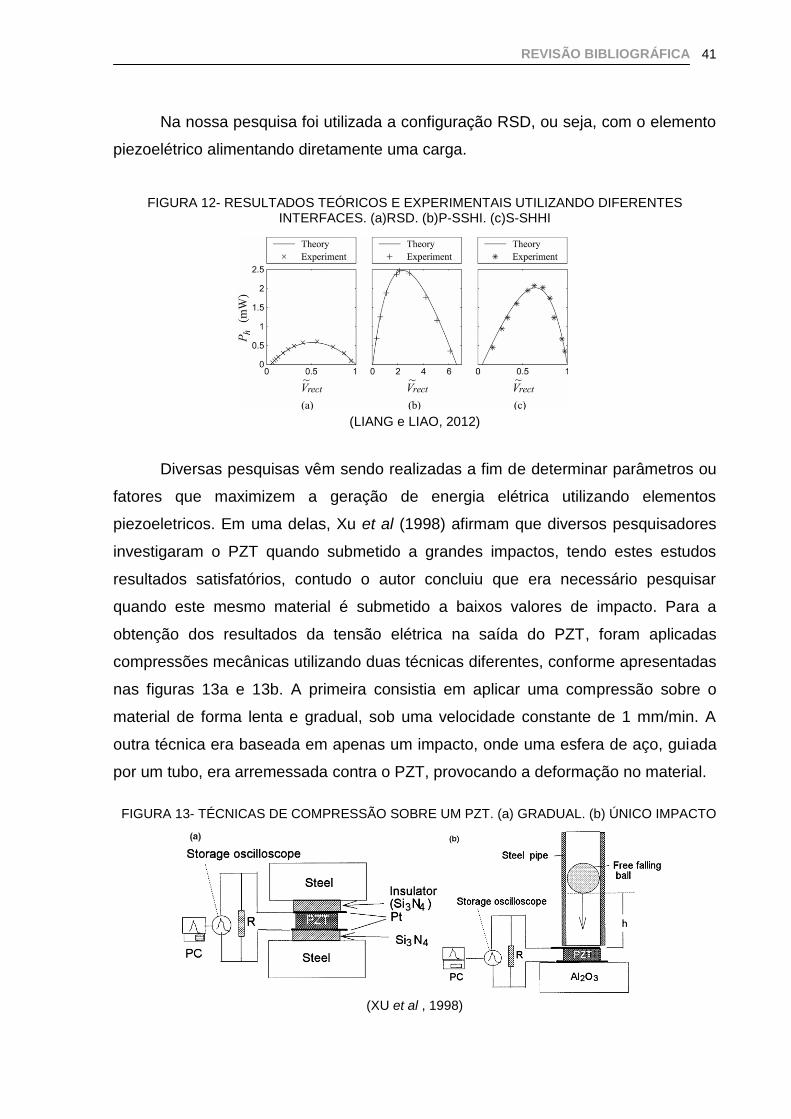
Os resultados apresentados na Figura 12 demonstram que as configurações
P-SSHI E S-SSHI geraram 500% e 400%, respectivamente, mais potência elétrica
que a configuração RSD para uma frequência de 42Hz e uma aceleração de 10m/s²
. Foi constatada, também, que a resposta alcançada apresentou uma curva simétrica
para a interface RSD e curvas assimétricas para as demais configurações quando
relacionada à tensão retificada (Vrect) e a potência recuperada (Ph) para uma dada
excitação mecânica constante. O motivo desta simetria é explicado pelos autores por
condicionarem à baixa influência exercida pelo circuito RSD na dinâmica do sistema.
REVISÃO BIBLIOGRÁFICA
41
Na nossa pesquisa foi utilizada a configuração RSD, ou seja, com o elemento
piezoelétrico alimentando diretamente uma carga.
FIGURA 12- RESULTADOS TEÓRICOS E EXPERIMENTAIS UTILIZANDO DIFERENTES INTERFACES. (a)RSD. (b)P-SSHI. (c)S-SHHI
(LIANG e LIAO, 2012)
Diversas pesquisas vêm sendo realizadas a fim de determinar parâmetros ou
fatores que maximizem a geração de energia elétrica utilizando elementos
piezoeletricos. Em uma delas, Xu et al (1998) afirmam que diversos pesquisadores
investigaram o PZT quando submetido a grandes impactos, tendo estes estudos
resultados satisfatórios, contudo o autor concluiu que era necessário pesquisar
quando este mesmo material é submetido a baixos valores de impacto. Para a
obtenção dos resultados da tensão elétrica na saída do PZT, foram aplicadas
compressões mecânicas utilizando duas técnicas diferentes, conforme apresentadas
nas figuras 13a e 13b. A primeira consistia em aplicar uma compressão sobre o
material de forma lenta e gradual, sob uma velocidade constante de 1 mm/min. A
outra técnica era baseada em apenas um impacto, onde uma esfera de aço, guiada
por um tubo, era arremessada contra o PZT, provocando a deformação no material.
FIGURA 13- TÉCNICAS DE COMPRESSÃO SOBRE UM PZT. (a) GRADUAL. (b) ÚNICO IMPACTO
(XU et al , 1998)

REVISÃO BIBLIOGRÁFICA
42
No experimento destes autores, foi detectado que o elemento, ao ser
submetido a baixos valores de impacto, apresentava como resposta correntes
elétricas em sentidos diferentes à medida que o nível deste impacto aplicado ao
material era incrementado ou decrementado, contudo a energia elétrica gerada era
equivalentes.
Em um dos trabalhos desenvolvidos Engel e Keawboonchuay (2003)
estabeleceram que a relação entre a área transversal e a espessura do material
piezoelétrico (relação TAR, ver Figura 14) e a força em que é submetido este
elemento determina uma maior ou menor geração de corrente e tensão elétrica.
FIGURA 14- RELAÇÃO ENTRE A ÁREA TRANVERSAL E A ESPESSURA DO MATERIAL PIEZOELETRICO
(ENGEL e KEAWBOONCHUAY, 2003)
Foi definido que quando o material possui uma área transversal maior que a
sua espessura, o mesmo apresentava uma capacidade maior de fornecimento de
tensão elétrica, contudo com uma menor capacidade de fornecimento de corrente
elétrica. Na sua pesquisa, foram apresentados resultados experimentais com
relações TAR diferentes, para efeitos de comparação com resultados teóricos.
Em outra pesquisa, FANG et al. (2006) afirmaram que a vibração mecânica
pode ser transformada em energia elétrica através de três tipos de transdutores
eletromecânicos: eletromagnéticos, eletrostáticos e piezoelétricos. Foi observado
que o elemento gerador mais efetivo dependia das condições específicas de
funcionamento. Foi detectado que o transdutor piezoelétrico possuía melhor
rendimento de conversão. Assim, foi apresentado um microgerador piezoelétrico,
baseado em uma de viga em balanço, conforme configuração apresentada na Figura
15.

REVISÃO BIBLIOGRÁFICA
43
FIGURA 15 – SEÇÃO TRANSVERSAL DO GERADOR
(FANG et al., 2006)
O bloco de níquel presente na extremidade livre tinha por finalidade alterar a
frequência natural do sistema para a frequência de vibração aplicada junto à
estrutura, com o objetivo de otimizar a capacidade de geração.
Para a colheita da energia elétrica, foram utilizados dois métodos: sendo o
primeiro por obter a máxima potência elétrica fornecida sobre uma carga variável e o
segundo foi retificar o sinal alcançado, utilizando quatro diodos de germânio comuns,
e alimentando esta mesma carga, conforme configuração apresentada na Figura 16.
FIGURA 16 - FLUXOGRAMA DE UTILIZAÇÃO DO APARATO INSTRUMENTAL
(FANG et al., 2006)
Com uma camada de 1,66 µm de PZT, o microgerador, submetido a uma
vibração mecânica de frequência idêntica à frequência natural em torno de 608Hz,
gerou um nível máximo de tensão de pico a pico de 898 mV sob uma carga de 112
kΩ e máxima potência elétrica de 2,16 µW para uma carga de 21.4 kΩ, sob uma
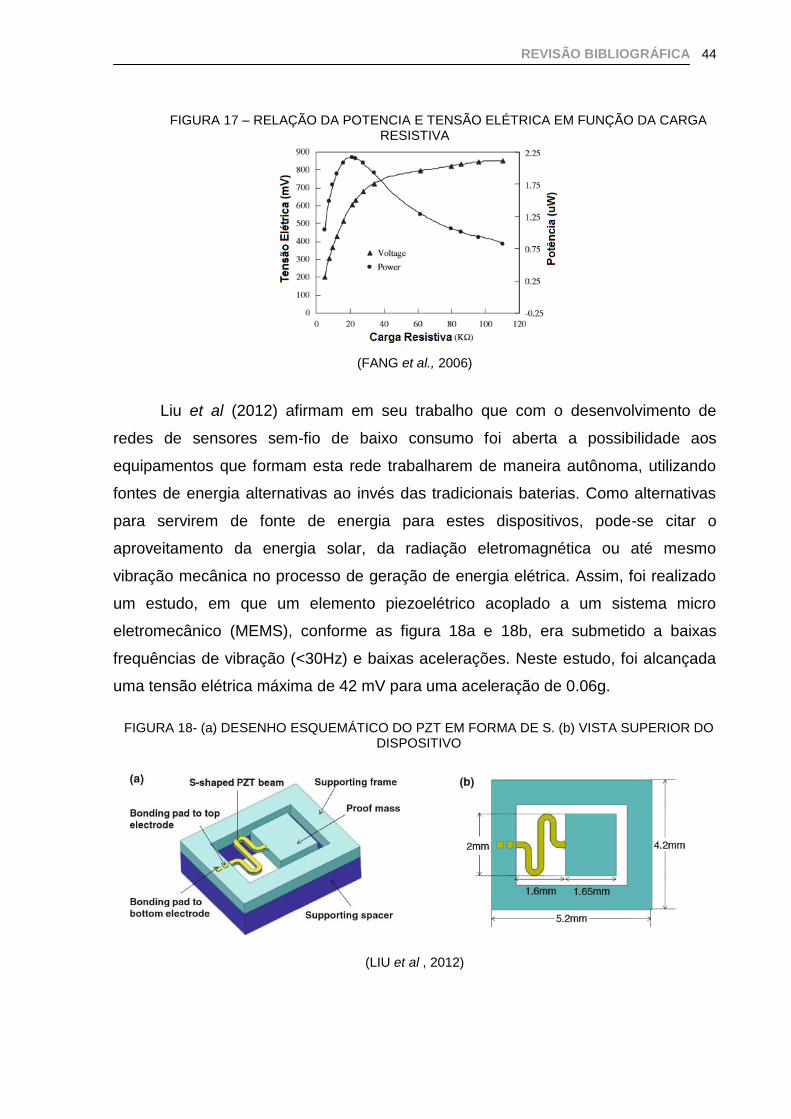
tensão elétrica de pico a pico de 608mV, conforme apresentado na Figura 17.
REVISÃO BIBLIOGRÁFICA
44
FIGURA 17 – RELAÇÃO DA POTENCIA E TENSÃO ELÉTRICA EM FUNÇÃO DA CARGA RESISTIVA
(FANG et al., 2006)
Liu et al (2012) afirmam em seu trabalho que com o desenvolvimento de
redes de sensores sem-fio de baixo consumo foi aberta a possibilidade aos
equipamentos que formam esta rede trabalharem de maneira autônoma, utilizando
fontes de energia alternativas ao invés das tradicionais baterias. Como alternativas
para servirem de fonte de energia para estes dispositivos, pode-se citar o
aproveitamento da energia solar, da radiação eletromagnética ou até mesmo
vibração mecânica no processo de geração de energia elétrica. Assim, foi realizado
um estudo, em que um elemento piezoelétrico acoplado a um sistema micro
eletromecânico (MEMS), conforme as figura 18a e 18b, era submetido a baixas
frequências de vibração (<30Hz) e baixas acelerações. Neste estudo, foi alcançada
uma tensão elétrica máxima de 42 mV para uma aceleração de 0.06g.
FIGURA 18- (a) DESENHO ESQUEMÁTICO DO PZT EM FORMA DE S. (b) VISTA SUPERIOR DO DISPOSITIVO
(LIU et al , 2012)

REVISÃO BIBLIOGRÁFICA
45
Yang e Yun (2012) citam que cada vez mais equipamentos portáteis com
baixo consumo de energia vêm sendo desenvolvidos para área a biomédica, militar e
redes de sensores. Estes autores apresentam um estudo em que os movimentos de
baixa frequência são utilizados para geração de energia elétrica através de
elementos piezoelétricos. Para isso, o desenvolvimento experimental foi adaptado
para os movimentos do corpo humano (Figura 19a e 19b). A estrutura criada
proporcionou uma potência elétrica de saída de 0.87 mW sobre uma carga de 90 kΩ
para uma frequência de 3.3 Hz.
FIGURA 19 – (a) IDEIA CONCEITUAL DE UM PZT FIXADO EM UM TECIDO. (b) APLICAÇÃO DO PROTOTIPO NAS ARTICULAÇÕES DOS DEDOS E COTOVELOS
(YANG e YUN, 2012)
Barbosa (2013) desenvolveu uma pesquisa que consistia numa investigação
experimental da geração de energia elétrica que uma viga piezoelétrica gerava
quando submetida a uma excitação mecânica. A viga utilizada no experimento foi do
tipo MFC (micro fiber composite), tendo uma de suas extremidades fixada a um
agitador por meio de um suporte metálico. A excitação mecânica foi fornecida por
um shaker, numa faixa de frequência próxima à correspondente ao primeiro modo de
vibração, com três amplitudes diferentes de oscilação de pico a pico, sendo as
acelerações aquisitidas por um acelerômetro. Para a análise experimental foram
montados circuitos de testes utilizando cargas resistivas, capacitivas e indutivas,
sendo três valores distintos para cada uma delas. O aparato instrumental pode ser
observado na Figura 20.

REVISÃO BIBLIOGRÁFICA
46
FIGURA 20 - APARATO INSTRUMENTAL
(BARBOSA, 2013)
Com o resultado apresentado foi constatado que o nível de tensão elétrica
gerado foi maior quando o sistema era submetido à maior amplitude de vibração na
frequência de 17,3 Hz. Foi discutido, também, que a tensão e a potência fornecida
aumentava à medida que a resistência equivalente do circuito era elevada, obtendo-
se uma tensão elétrica de 3,90 V e 1,86 mW de potência fornecida para uma carga
de 8,14 kΩ. Em relação às cargas reativas, foi alcançada uma potência elétrica
máxima de 19,6 µW sob um capacitor de 4,7 µF e 0,6 mW para uma carga indutiva
de 611 mH, sendo estes os valores teóricos máximos das cargas utilizadas.
Conforme apresentado, diversos pesquisadores utilizam a estrutura de viga
para recuperação de energia quando submetidas a vibrações mecânicas, utilizando
muitas vezes um agitador/excitador para gerar este efeito mecânico. Yang et
al(2013) propuseram um estudo, também baseado em estrutura de viga, mas que a
vibração imposta sobre a estrutura era exercida pela ação dos ventos.
O protótipo desenvolvido, conforme apresentado na Figura 21, consistia de
um piezoelétrico fixado a uma viga monoengastada, onde na extremidade livre foram
acoplados corpos de prova com diversos perfis de seção transversal (quadrado,
retângulo, triângulo e no formato de D), sendo testado em um túnel de vento.

REVISÃO BIBLIOGRÁFICA
47
FIGURA 2.21 – PROTÓTIPO DESENVOLVIDO PARA COLHEITA DA ENERGIA ELÉTRICA A PARTIR DA FORÇA DO VENTO
(YANG et al, 2013)
Para a obtenção dos resultados experimentais, foi adotada uma carga
resistiva variável alimentada diretamente pelo elemento piezoelétrico com o objetivo
de se alcançar o ponto ótimo de geração da potência elétrica em função dos perfis
dos corpos de prova e da velocidade do vento. Foi constatado que o perfil quadrático
se mostrou mais eficiente, fornecendo aproximadamente 5,5 mW de potência
elétrica para uma carga de 105 kΩ quando submetido a uma velocidade do vento
igual a 6 m\s. Foi demonstrado, também, que para este perfil, ocorria um aumento
na potência elétrica fornecida à medida que a velocidade era aumentada,
alcançando um fornecimento de 8.4 mW, para esta mesma carga, quando a
estrutura era submetida a um vento com velocidade de 8 m/s.
2.4 MODELAGEM COMPUTACIONAL DO EFEITO PIEZOELÉTRICO
Os modelos numéricos confiáveis fornecem informações importantes no
processo de construção de protótipos experimentais e reduzem os problemas de
obtenção de dados através de métodos empíricos.
As simulações computacionais para análise dos modos de vibrações,
frequências e deformações mecânicas são muitas vezes realizadas no ambiente de
programação do software ANSYS®. Segundo Andrade (2008) este programa possui
uma vasta biblioteca com mais de cem tipos de elementos disponíveis para diversos
tipos de análise, como modais, harmônicas e transientes, envolvendo modelos
bidimensionais e tridimensionais.

REVISÃO BIBLIOGRÁFICA
48
Em algumas pesquisas, o software ANSYS® é utilizado para simulação de
materiais piezoelétricos. Andrade (2008) utilizou esta ferramenta no processo de
controle de vibração mecânica em estruturas flexíveis utilizando circuitos
ressonadores baseados em materiais piezoelétricos. Para isto, o autor fez análises
modais em uma viga de alumínio, a fim de detectar seus modos de vibração e as
frequências naturais envolvidas.
Al-hazmi (2008), utilizou o ANSYS® para caracterização de um sistema, onde
simulava materiais piezoelétricos tridimensionais. Já Koyama e Nakamura (2008)
apresentaram um estudo em que se analisava a potência elétrica de saída de uma
cerâmica piezoelétrica. Os parâmetros e a eficiência de conversão da energia
mecânica em energia elétrica foram obtidos através deste programa.
Em outro estudo, Zhu et al (2009) apresentaram um modelo baseado em
elementos finitos para analisar, no processo de captação de energia elétrica, a
densidade de potência elétrica de um material piezoelétrico quando o mesmo foi
conectado a uma carga e submetido a uma vibração mecânica. O programa foi
utilizado para prever saídas elétricas de corrente, tensão e potência do dispositivo
de captação ligado a diferentes valores de resistência de carga, além dos valores de
amplitude de deslocamento da ponta da viga e deslocamento da frequência
ressonante nessas condições.
O estudo foi baseado em dois materiais piezoelétricos que preenchiam a
parte superior e inferior da uma viga, num formato de sanduíche (Figura 22).
FIGURA 22- MODELO DESENVOLVIDO CONECTADO A UMA CARGA RESISTIVA
(ZHU et al, 2009)

REVISÃO BIBLIOGRÁFICA
49
Os parâmetros elétricos foram analisados, assim como os parâmetros
mecânicos envolvidos. Nas suas conclusões, foi mencionado que com a utilização
deste modelo é possível prever o desempenho de dispositivos, que sejam utilizados
no processo de obtenção de energia elétrica (“energy harvesting”) baseados em
materiais piezoelétricos, antes mesmo de ser fabricado e testado, reduzindo, assim,
os custos financeiros, com ensaios de repetição e testes. Além disso, este modelo
poderia ser utilizado em projetos que visem aperfeiçoar a geração de energia
elétrica.
Xiaojin et al (2010) e Wang et al (2010) utilizaram a ferramenta computacional
ANSYS® em suas pesquisas no processo de análise de controle de vibração
utilizando elementos piezoelétricos.
Zhu (2010) apresentou outro estudo, baseado nos métodos de elementos
finitos, utilizando o ANSYS®, onde duas cerâmicas piezoelétricas preenchiam a parte
superior e inferior da uma viga, no formato de sanduíche, tal como em Zhu (2009).
Na pesquisa, os parâmetros geométricos da viga metálica eram considerados no
processo de obtenção de energia elétrica. Com o modelo desenvolvido, foi possível
obter a potência elétrica na saída do material piezoelétrico, fornecida a um resistor,
em função da vibração mecânica em que o sistema foi submetido, como, também,
em função das dimensões desta viga.
Conforme demonstrado nas pesquisas citadas anteriormente, a ferramental
computacional proporcionou aos pesquisadores estimar a capacidade de geração de
um elemento piezoelétrico, seja no processo de colheita de energia, ou mesmo,
como elemento sensor. Outra possibilidade de utilizar esta ferramenta é avaliar a
melhor configuração que proporcione uma maior eficiência na geração de energia
elétrica. Como por exemplo, no processo de conversão de energia a partir de
configurações tradicionais utilizando vigas, poderia ser investigada, utilizando os
métodos de elementos finitos (MEF), a influência do material que forma esta viga
bem como a sua geometria e a melhor localização para posicionar um elemento
piezoelétrico.
SHEBEEB e SALLEH (2010) realizaram um estudo em que se pretendia
analisar, através de simulações desenvolvidas no ANSYS®, a distribuição da tensão
mecânica e da deformação ao longo da superfície de três vigas de formatos
diferentes (retangular, triangular e trapezoidal) e mesmo tamanho volumétrico e a

REVISÃO BIBLIOGRÁFICA
50
relação desta distribuição com a geração de energia elétrica fornecida por um
elemento piezoelétrico. Para isso, foram aplicadas nas três vigas as mesmas
condições de excitação mecânica de entrada no intervalo de frequência entre 50 Hz
e 150 Hz. Os resultados mostraram que o formato triangular apresentou valor
máximo de deformação com uma distribuição uniforme sobre sua superfície, sendo
alcançada uma potência máxima elétrica de 5 mW quando excitada a uma
frequência de 85 Hz. Os formatos das vigas pesquisadas e a distribuição das
deformação ao longo da superfície podem ser observadas na Figura 23.
FIGURA 23 - DISTRIBUIÇÃO DA DEFORMAÇÃO AO LONGO DA SUPERFÍCIE DAS VIGAS. (a)RETANGULAR. (b)TRAPEZOIDAL. (c)VIGA TRIANGULAR
(SHEBEEB e SALLEH, 2010)
Embora nesta pesquisa tenha sido demonstrado que a geometria triangular e
trapezoidal tenham apresentado uma melhor distribuição da deformação elástica ao
longo da sua superfície, a utilização de vigas retangulares continuam sendo
aplicadas. Demonstrou-se que uma viga nesta geometria não possui uma
distribuição de deformação uniforme ao longo da superfície, logo é necessário, ao se
imaginar no processo de recuperação de energia, que um elemento piezoelétrico
seja fixado na região de maior deformação para que a eficiência de conversão seja
aumentada. Ao se aplicar um material piezoelétrico sobre toda a extensão desta viga
retangular, a deformação imposta no material varia de um valor máximo até um valor
mínimo impossibilitando que este material trabalhe com seu potencial máximo.

REVISÃO BIBLIOGRÁFICA
51
Uma das alternativas seria utilizar artifícios que promovessem uma melhor
distribuição da deformação ao longo de uma viga retangular. GUAN et al (2013)
desenvolveram um aparato instrumental em que se pretendia utilizar um elemento
piezoelétrico acoplado em toda extensão de uma viga de titânio de geometria
retangular. Para alcançar uma melhor distribuição da deformação, foi proposta uma
estrutura que utilizava dois blocos de cobre para alterar a dinâmica do sistema, tal
como apresentado nas figuras 24a e 24b.
FIGURA 24- ESTRUTURA UTILIZANDO DOIS BLOCOS DE MASSA. (a)PERSPECTIVA LATERAL. (b)VISÃO EXTERNA
(GUAN et al , 2013)
Estes pesquisadores utilizaram o ANSYS® para estimar, utilizando-se da
análise modal, os dois primeiros modos de vibração da estrutura, assim como as
frequências naturais correspondentes. Na figura 25, é possível observar o
movimento de vai e vem apresentado pela estrutura nos dois primeiros modos de
vibração.
FIGURA 25- OS DOIS PRIMEIROS MODOS DE VIBRAÇÃO OBTIDAS ATRAVÉS DE SIMULAÇÃO BASEADAS NO METODO DE ELEMENTOS FINITOS
(GUAN et al , 2013)

REVISÃO BIBLIOGRÁFICA
52
Para verificar a distribuição da deformação ao longo da viga, foram utilizados
extensômetros (strain-gauge) em três localidades diferentes. Para geração de
vibração mecânica, foi utilizado um agitador (shaker), excitando a estrutura numa
frequência de 35,7 Hz, sendo este valor referente ao primeiro modo de vibração. A
estrutura experimental utilizada pode ser observada na Figura 26.
FIGURA 26- DIAGRAMA DO APARATO INSTRUMENTAL
(GUAN et al , 2013)
Uma viga tradicional, com apenas um bloco de metal em sua ponta, foi
fabricada para comparações dos resultados. Os materiais da placa PZT e dos
substratos utilizados nos dois experimentos eram os mesmos, assim como as suas
dimensões.
A massa do bloco presente na viga tradicional foi calculada de modo que a
frequência natural resultante fosse idêntica a do modelo proposto. Para comparação
da distribuição de deformação, foram igualmente espaçados e colados três
extensômetros na face inferior das duas vigas. Os dados de tensão de saída destes
sensores, nominados 1, 2 e 3, foram obtidos a partir de um circuito amplificador. Os
resultados alcançados podem ser conferidos na Tabela 1, onde foi constatada uma
uniformidade na distribuição da deformação elástica no modelo proposto em relação
à viga tradicional. Este mesmo autor afirma que, em geral, os resultados
apresentados utilizando os métodos de elementos finitos tendem ser iguais aos
obtidos experimentalmente.

REVISÃO BIBLIOGRÁFICA
53
TABELA 1- DISTRIBUIÇÃO DA DEFORMAÇÃO NAS DUAS VIGAS (µm/m)
POSIÇÃO 1 2 3
Modelo Prosposto 72 72 74
Viga Tradicional 74 57 37
Com este capítulo, conclui-se que é possível utilizar os métodos de elementos
finitos para estimar a capacidade de geração de um elemento piezoelétrico, assim
como obter o comportamento da deformação e os modos de vibração de uma
estrutura. A utilização de uma viga retangular se mostrou mais evidente nas
pesquisas, assim como o uso de shakers (agitadores/excitadores mecânicos) para
geração de vibração mecânica. Outra constatação é a utilização de sensores do tipo
extensômetros para obtenção de dados práticos de deformação sofrida por uma
estrutura.
.

3 MATERIAIS E MÉTODOS

MATERIAIS E MÉTODOS
55
MATERIAIS E MÉTODOS
3.1 INTRODUÇÃO
Este trabalho de pesquisa foi realizado no Laboratório de Sistemas e
Estruturas Ativas (LASEA) do DEE/CEAR/UFPB, de acordo com as seguintes
etapas:
Desenvolvimento do modelo numérico baseado em métodos de elementos finitos
(MEF);
Desenvolvimento das análises modal e harmônica;
Desenvolvimento do aparato experimental;
Desenvolvimento da instrumentação eletrônica necessária;
E por fim o desenvolvimento da análise transiente para ajuste do modelo numérico
em função de dados experimentais.
3.2 MODELO NUMÉRICO VIA MEF
Para a elaboração do modelo numérico da viga com o elemento PZT
acoplado em sua estrutura optou-se por utilizar dois tipos de elementos finitos:
Sendo um de casca para modelar a viga de alumínio e um elemento sólido para
modelar o material piezoelétrico.
O desenvolvimento deste modelo foi baseado no programa computacional
de elemento finitos ANSYS®. O processo de modelagem utilizado seguiu as
seguintes etapas:
1. Definição dos elementos finitos utilizados;
2. Criação geométrica da estrutura proposta;
3. Atribuição das propriedades do material da viga e do PZT ao modelo
desenvolvido;
4. Criação das malhas de elementos finitos e condições de contorno;
5. Desenvolvimento da análise modal, harmônica e transiente.

MATERIAIS E MÉTODOS
56
A concepção inicial foi desenvolver um modelo tridimensional, logo, foi
necessário utilizar elementos finitos que possuam esta característica. Assim, foi
selecionado o elemento SHELL93, para modelar a viga de alumínio, e o elemento
SOLID226, para modelar o PZT. O elemento utilizado para modelar a viga possui 8
nós e 6 graus de liberdade em cada nó, apresentando movimento de rotação e
translação em x, y e z em cada um cada deles, sendo recomendado seu uso em
aplicações estruturais por possuir plasticidade, apresentar deformação para todos os
sentidos dos planos, e por admitir grandes deslocamentos e aplicações de tensões
(ANSYS 8.0, 2003).
Na Figura 27 é possível observar a geometria, as localizações dos nós e o
sistema de coordenada do elemento SHELL93.
FIGURA 27- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO SHELL93
(Adaptado de ANSYS 8.0, 2003).
O elemento finito SOLID226 utilizado para modelar a cerâmica piezoelétrica
possui 20 nós, com até 5 graus de liberdade em cada um deles, e características
estruturais, elétricas e piezoelétricas, podendo incluir estes efeitos nas análises
dinâmicas. As capacidades estruturais incluem elasticidade, plasticidade,
viscoelasticidade, viscoplasticidade, fluência, grande esforço e grande deflexão
(ANSYS 12.0, 2009).
O elemento finito SOLID226 relaciona as conversões de energia mecânica em
elétrica e a energia elétrica em mecânica. Para isso o modelo numérico requer uma
matriz de constantes dielétricas (Equação 3.1), neste caso, sendo admitidas as

MATERIAIS E MÉTODOS
57
permissividades relativas (ε/ε0). Uma matriz piezoelétrica (Equação 3.2), que é o
tensor dos coeficientes piezoelétricos de deformação (propriedades piezoelétricas),
relaciona a relação da carga elétrica com a força aplicada (d). A matriz dos
coeficientes elásticos (Equação 3.3) relaciona os parâmetros elásticos do elemento
piezoelétrico. Nestas equações , εxx representa as constantes dielétricas, dxx as
propriedades piezoelétricas, v é o coeficiente de Poisson e YxE representam o
módulo de elasticidade (para os índices x=1) e cisalhamento (para os índices x=3).(
MAIO,2011, XIAOJIN et al., 2010, SOUTO, 2008)
(3.1)
(3.2)
(3.3)
Na Figura 28, é possível observar a geometria, as localizações dos nós e o
sistema de coordenada do elemento SOLID226.

MATERIAIS E MÉTODOS
58
FIGURA 28- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO SOLID226
(Adaptado de ANSYS 8.0, 2003).
3.2.1 ANÁLISE MODAL
O material piezoelétrico gera um potencial elétrico ao ser deformado
mecanicamente. Essa tensão ou diferença de potencial é proporcional à deformação
provocada no elemento. Entretanto, alguns desses materiais são relativamente
rígidos e muito frágeis. Nesse caso, para serem utilizados como geradores de
energia elétrica, precisam ser acoplados a uma estrutura mecânica que proporcione
suporte mecânico. Neste estudo, foi utilizado como elemento gerador piezoelétrico a
cerâmica de Zirconato Titanato de Chumbo (PZT), em formato de placa retangular.
Sendo assim, foi escolhida uma viga de alumínio para o acoplamento do elemento
piezoelétrico.
Esta análise tem como resultado as formas de vibração da estrutura
associada a uma frequência natural de vibração. Baseado na frequência natural de
vibração que se deseja trabalhar é possível determinar as dimensões da viga. Para
este trabalho, foi escolhida uma viga de alumínio com dimensões e propriedades
mecânicas apresentadas na Tab. 2. As dimensões tiveram como parâmetros de
escolha a capacidade de força máxima do excitador eletromecânico (shaker) e as
dimensões dos elementos piezoelétricos existentes no LaSEA.
O desenvolvimento da análise modal teve como objetivo conhecer os modos
de vibração e as frequências naturais envolventes.

MATERIAIS E MÉTODOS
59
TABELA 2- DIMENSÕES E PROPRIEDADES DO MATERIAL DA VIGA DE ALUMÍNIO
Espessura (H) 1 mm
Comprimento (A) 67.16 mm
Largura (B) 22 mm
Módulo de Elasticidade (E) 69 GPa
Coeficiente de Poisson (V) 0,33
Densidade (ρ) 2700 Kg/m³
Inicialmente, no desenvolvimento do modelo numérico, analisou-se apenas a
viga sem o elemento PZT fixado. Primeiramente, foi realizada uma comparação
entre um elemento bidimensional BEAM3 e o elemento de casca SHELL93, com
finalidade de se comparar a coerência dos resultados, objetivando-se utilizar o
elemento de casca, já que o elemento do PZT é um sólido.
O elemento finito bidimensional escolhido foi o BEAM3, sendo este
considerado um elemento de viga possuindo capacidade de tensão, compressão e
flexão.
FIGURA 29- GEOMETRIA E LOCALIZAÇÃO DOS NÓS NO ELEMENTO FINITO BEAM3
(Adaptado de ANSYS 12.0, 2009).
A Figura 29 mostra a geometria, a localização dos nós, e o sistema de
coordenada para este elemento. O BEAM3 é definido por dois nós com até três
graus de liberdade em cada um deles, pela área da seção transversal, pelo
momento de inércia de superfície, pela altura e pelas propriedades do material
(ANSYS 12.0, 2009).
Para todas as análises, foi observado apenas o primeiro modo de vibração
da estrutura, a fim de se comparar os resultados apresentados entre cada elemento
e o modelamento analítico, determinando, assim, qual elemento deveria ser aplicado
nas análises dinâmicas.

MATERIAIS E MÉTODOS
60
Posteriormente, foram desenvolvidas simulações numéricas para vigas de
alumínio com comprimentos variando de 70 mm a 750 mm e com largura e
espessura fixadas em 22 mm e em 1 mm.
Após a etapa de análise modal da viga, foi adicionado no modelo numérico o
PZT. Nesta nova configuração, foi utilizado o elemento de casca SHELL93 para
modelar a viga de alumínio e um elemento sólido SOLID226 para modelar o
piezoelétrico.
Para que um elemento se acople ao outro é necessário que pelo menos um
nó de cada elemento esteja interligado. Os nós de ligação do elemento que forma a
viga se encontram na linha neutra, sendo esta localizada na metade da sua
espessura da viga, de modo que o elemento da viga de alumínio e o piezoelétrico
podem ser ligados conforme a Figura 30a. A Figura 30b mostra o esquema da
configuração do problema experimental onde o piezoelétrico está ligado à viga de
alumínio sobre a sua superfície.
Para esta análise, foi inserida uma cerâmica piezoelétrica na região próxima
ao engaste da viga, devido à necessidade de obtenção de maior nível de
deformação mecânica sobre o PZT. Os programas desenvolvidos para a análise
modal da viga de alumínio sem o PZT, comparando os elementos BEAM3 e
SHELL93, são mostrados nos Apêndices 1 e 2, enquanto o programa para análise
modal da viga com o PZT fixado encontra-se no Apêndice 3.
FIGURA 30- CONFIGURAÇÃO ENTRE A VIGA DE ALUMÍNIO E A CERÂMICA PIEZOELÉTRICA NO MODELO NUMÉRICO. VISTA LATERAL
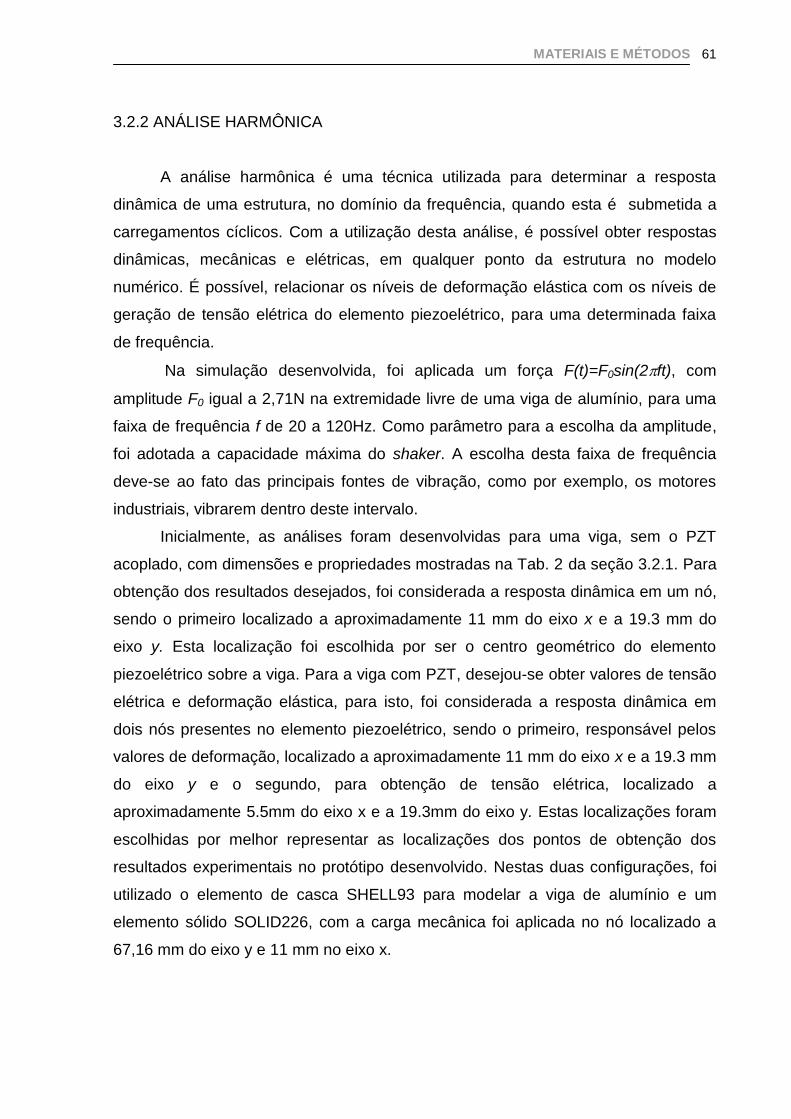
MATERIAIS E MÉTODOS
61
3.2.2 ANÁLISE HARMÔNICA
A análise harmônica é uma técnica utilizada para determinar a resposta
dinâmica de uma estrutura, no domínio da frequência, quando esta é submetida a
carregamentos cíclicos. Com a utilização desta análise, é possível obter respostas
dinâmicas, mecânicas e elétricas, em qualquer ponto da estrutura no modelo
numérico. É possível, relacionar os níveis de deformação elástica com os níveis de
geração de tensão elétrica do elemento piezoelétrico, para uma determinada faixa
de frequência.
Na simulação desenvolvida, foi aplicada um força F(t)=F0sin(2ft), com
amplitude F0 igual a 2,71N na extremidade livre de uma viga de alumínio, para uma
faixa de frequência f de 20 a 120Hz. Como parâmetro para a escolha da amplitude,
foi adotada a capacidade máxima do shaker. A escolha desta faixa de frequência
deve-se ao fato das principais fontes de vibração, como por exemplo, os motores
industriais, vibrarem dentro deste intervalo.
Inicialmente, as análises foram desenvolvidas para uma viga, sem o PZT
acoplado, com dimensões e propriedades mostradas na Tab. 2 da seção 3.2.1. Para
obtenção dos resultados desejados, foi considerada a resposta dinâmica em um nó,
sendo o primeiro localizado a aproximadamente 11 mm do eixo x e a 19.3 mm do
eixo y. Esta localização foi escolhida por ser o centro geométrico do elemento
piezoelétrico sobre a viga. Para a viga com PZT, desejou-se obter valores de tensão
elétrica e deformação elástica, para isto, foi considerada a resposta dinâmica em
dois nós presentes no elemento piezoelétrico, sendo o primeiro, responsável pelos
valores de deformação, localizado a aproximadamente 11 mm do eixo x e a 19.3 mm
do eixo y e o segundo, para obtenção de tensão elétrica, localizado a
aproximadamente 5.5mm do eixo x e a 19.3mm do eixo y. Estas localizações foram
escolhidas por melhor representar as localizações dos pontos de obtenção dos
resultados experimentais no protótipo desenvolvido. Nestas duas configurações, foi
utilizado o elemento de casca SHELL93 para modelar a viga de alumínio e um
elemento sólido SOLID226, com a carga mecânica foi aplicada no nó localizado a
67,16 mm do eixo y e 11 mm no eixo x.

MATERIAIS E MÉTODOS
62
As Figuras 31a e 31b apresentam a localização do nó escolhido para
obtenção das respostas dinâmicas desejadas na viga com e sem o PZT acoplado
em sua estrutura.
FIGURA 31 – LOCALIZAÇÃO DO NÓS ESCOLHIDOS PARA OBTENÇÃO DOS RESULTADOS
Para a análise envolvendo apenas a viga, foram obtidas as amplitudes de
deformação elástica sofrida pelo nó escolhido na faixa de frequência desejada.
Na análise harmônica da viga com o PZT acoplado, foi possível obter o
potencial elétrico gerado pelo elemento piezoelétrico. Para obtenção da tensão
elétrica gerada, em circuito aberto, foi atribuída uma condição elétrica de contorno,
aterrando-se todos os nós comuns da viga e da base do PZT, criando-se assim um
valor de referência para medição da tensão elétrica no elemento. Os programas para
as simulações desenvolvidas para a viga de alumínio sem e com o PZT podem ser
observados nos Apêndices 4 e 5, respectivamente.
Com a análise harmônica realizada, foi possível relacionar as amplitudes de
tensão elétrica gerada, pelo elemento piezoelétrico, em função da deformação
elástica do mesmo sofrida entre 20 e 120 Hz.

MATERIAIS E MÉTODOS
63
3.3 DESENVOLVIMENTO DE UMA ESTRUTURA PARA ENSAIOS
Para obtenção dos resultados experimentais, foi necessário que uma bancada
experimental fosse desenvolvida a fim de reproduzir as condições impostas nas
simulações numéricas. Com a obtenção destes dados, foi possível validar as
simulações ou mesmo ajustar parâmetros no modelo numérico.
A bancada experimental consiste basicamente de um excitador
eletrodinâmico (shaker), que tem a função de gerar vibração mecânica forçada na
viga; de um gerador de função, que tem como objetivo gerar um sinal senoidal; de
um amplificador, que tem como objetivo amplificar o sinal originado pelo gerador de
função e excitar o shaker; de um osciloscópio para visualização e aquisição dos
resultados e uma década resistiva para obtenção da tensão elétrica e,
consequentemente, obter a potência elétrica fornecida pelo PZT. Na Tabela 3 é
apresentado o modelo e a marca de cada equipamento utilizado nesta pesquisa. Na
Figura 32 é possível observar a constituição da bancada experimental
TABELA 3- MARCA E MODELO DOS EQUIPAMENTOS UTILIZADOS
EQUIPAMENTOS MARCA MODELO
Shaker Brüel & kjaer 4810
Gerador de função Agilent 33220A
Amplificador de Potência Stetsom TH2030
Osciloscópio Agilent DSO1012A
Fonte de tensão a Agilent U8002A
Fonte de tensão b Minipa MPL-3303M
Década resistiva Minipa MDR-611
FIGURA 32- BANCADA EXPERIMENTAL

MATERIAIS E MÉTODOS
64
Neste caso, o elemento piezelétrico está acoplado na viga de alumínio, sendo
esta última, também, fixada a uma base metálica, conforme fotografia da Figura 33.
Assim, uma extremidade da viga foi engastada e a outra extremidade acoplada ao
excitador. Logo, a vibração mecânica imposta pelo shaker foi transferida para a
estrutura, e consequentemente ao PZT, causando deformação no mesmo, gerando
tensão elétrica.
FIGURA 33 – BASE METÁLICA E O BLOCO DE FIXAÇÃO DA VIGA COM PZT
3.3.1 ACOPLAMENTO DO PZT À VIGA
O estudo do melhor posicionamento de um PZT em uma viga se torna
importante quando se pretende maximar seu rendimento na produção de energia
elétrica. Conforme já mencionado, um material piezoelétrico produz tensão elétrica
quando sofre uma deformação mecânica. Portanto é necessário, que este elemento
seja fixado em um local da viga onde a mesma sofre a maior deformação mecânica,
sendo esta próxima à região do engaste.
Neste experimento, para fins de pesquisa, foi utilizado um único PZT,
localizado junto ao engaste na face superior da viga de alumínio. A cerâmica
utilizada foi o PZT-C64, no formato de placa retangular, com dimensões de 38,66
mm de comprimento, 21,89 mm de largura e 0,26 mm de espessura.
Na Tabela 4 são apresentadas as características piezo-cerâmicas deste
material, conforme informado pelo fornecedor.
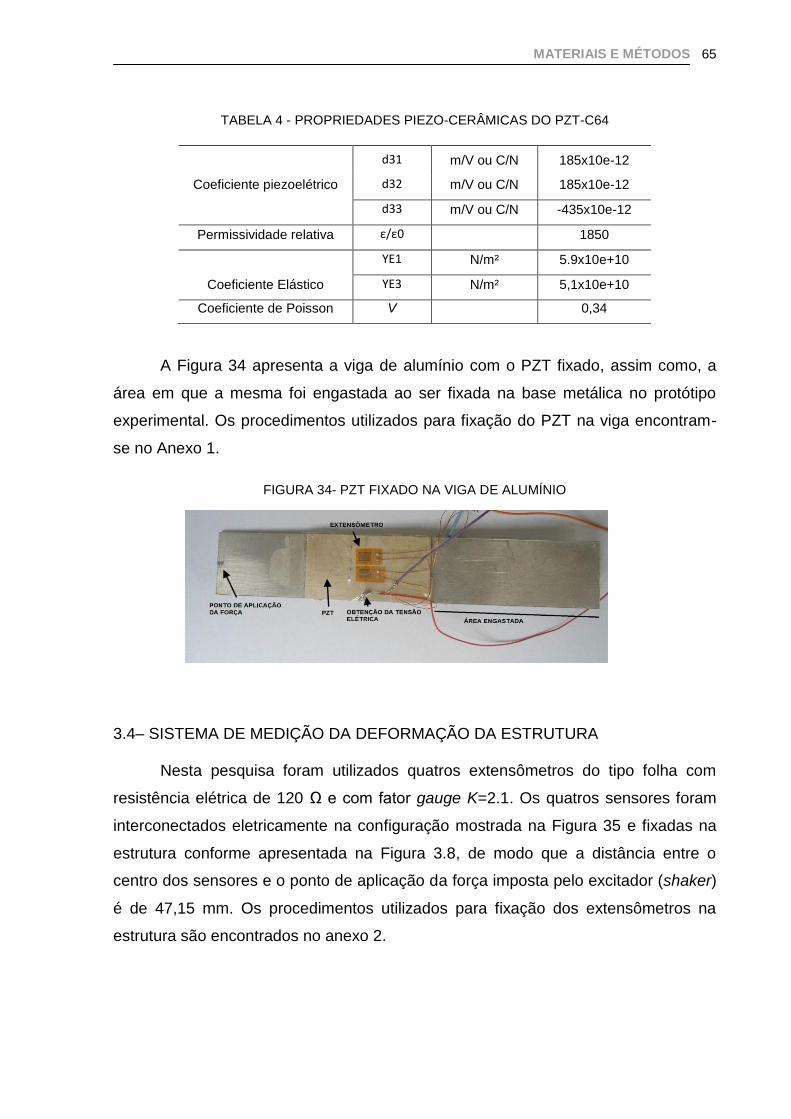
MATERIAIS E MÉTODOS
65
TABELA 4 - PROPRIEDADES PIEZO-CERÂMICAS DO PZT-C64
A Figura 34 apresenta a viga de alumínio com o PZT fixado, assim como, a
área em que a mesma foi engastada ao ser fixada na base metálica no protótipo
experimental. Os procedimentos utilizados para fixação do PZT na viga encontram-
se no Anexo 1.
FIGURA 34- PZT FIXADO NA VIGA DE ALUMÍNIO
3.4– SISTEMA DE MEDIÇÃO DA DEFORMAÇÃO DA ESTRUTURA
Nesta pesquisa foram utilizados quatros extensômetros do tipo folha com
resistência elétrica de 120 Ω e com fator gauge K=2.1. Os quatros sensores foram
interconectados eletricamente na configuração mostrada na Figura 35 e fixadas na
estrutura conforme apresentada na Figura 3.8, de modo que a distância entre o
centro dos sensores e o ponto de aplicação da força imposta pelo excitador (shaker)
é de 47,15 mm. Os procedimentos utilizados para fixação dos extensômetros na
estrutura são encontrados no anexo 2.
d31 m/V ou C/N 185x10e-12
Coeficiente piezoelétrico d32 m/V ou C/N 185x10e-12
d33 m/V ou C/N -435x10e-12
Permissividade relativa ε/ε0 1850
Coeficiente Elástico
YE1 N/m² 5.9x10e+10
YE3 N/m² 5,1x10e+10
Coeficiente de Poisson V 0,34

MATERIAIS E MÉTODOS
66
FIGURA 35- PONTE DE WHEASTSTONE USADA PARA MEDIÇÃO DA DEFORMAÇÃO COM OS EXTENSÔMETROS DE RESISTÊNCIA ELÉTRICA (STRAIN GAUGES)
(Adaptado de BALBINOT e BRUSAMARELLO, 2011)
Quando uma ponte de Wheatstone está em equilíbrio, a tensão de saída Eo=
0 Volts. Esta situação ocorre quando os quatros resistores têm valores exatamente
iguais ou quando, de acordo com a figura 3.9, o valor resistivo de SG2 multiplicado
pelo valor de SG4 é exatamente igual ao valor de SG1 multiplicado pelo de SG3, de
modo que, qualquer pequena variação na resistência elétrica destes sensores
provocaria uma tensão de saída Eo diferente de 0 Volts.
Embora os sensores utilizados tenham o mesmo valor nominal, qualquer
diferença entre estes resultaria numa tensão de saída Eo diferente de 0 volts. Para
minimizar o erro na aquisição da tensão Eo foi colocado um trimpot de 20 kΩ,
conforme configuração demonstrada na Figura 36, de modo a compensar estas
pequenas variações nominais.
FIGURA 36- BALANCEAMENTO DA PONTE DE WHEATSTONE COM TRIMPOT
(Adaptado de BALBINOT e BRUSAMARELLO, 2011)
Como citado anteriormente, ao ser aplicada uma força na extremidade livre de
uma viga monoengastada, ocorre uma deformação proporcional à carga aplicada,
como também uma variação no valor das resistências elétricas dos extensômetros.

MATERIAIS E MÉTODOS
67
Se a deformação imposta na estrutura for muito baixa, a tensão de saída Eo é
proporcionalmente pequena. Assim é necessário um circuito que amplifique este
sinal tornando-o mais fácil de medir e armazenar.
Para isso, foi desenvolvido um amplificador de instrumentação, baseado no
circuito integrado (CI) INA122P, com ganho calculado em 923, conforme
demonstrado no anexo 3. Este CI é um preciso amplificador de instrumentação para
pequenos sinais diferenciais, sendo sua utilização ideal para instrumentação portátil
ou sistemas de aquisição de dados. (BURR-BROWN CORPORATION®, 1997)
Após esta etapa foi obtida a curva característica de deformação da estrutura
na região elástica. Para isso, foi aplicada na extremidade livre da viga quatro massas
com pesos distintos, e para cada um delas, obtidos os valores de tensão elétrica na
saída do circuito amplificador e, consequentemente, na saída da ponte de
Wheatstone. Para obter os valores desta tensão, foi utilizado um multímetro digital
Agilent, modelo U1252B.
3.5 OBTENÇÃO DA TENSÃO E DA POTÊNCIA ELÉTRICA FORNECIDA PELO
ELEMENTO PIEZOELÉTRICO EM FUNÇÃO DA DEFORMAÇÃO SOFRIDA NA
ESTRUTURA
Os dados de frequência e amplitude de vibração de saída do excitador foram
controlados pelo gerador de funções que é conectado ao amplificador de potência
responsável pela alimentação do shaker. Para isso, o gerador de função foi regulado
para fornecer um sinal senoidal variando entre 20 e 120Hz, com passos de 5Hz, com
amplitude de 100mVpp ao amplificador de potência. Por sua vez, o amplificador foi
ajustado para fornecer uma amplitude de 7.2Vpp, sendo este o limite elétrico
suportado pelo excitador eletromagnético (Shaker).
Nesta etapa do trabalho foram alcançados quatro objetivos distintos:
1- Obtenção os valores da tensão elétrica de pico a pico (Vpp) gerada pelo PZT para
a faixa de frequência adotada, considerando apenas a impedância de entrada do
equipamento de aquisição;
2- Determinação da impedância do elemento gerador na faixa de frequência
adotada;
MATERIAIS E MÉTODOS
68
3- Obtenção da máxima potência elétrica RMS fornecida pelo piezoelétrico na faixa
de frequência adotada;
4- Determinação dos valores da deformação elástica imposta sobre a estrutura.
Pela teoria clássica, é estudado que a máxima transferência de potência
ocorre quando existe uma igualdade entre a resistência interna da fonte geradora de
tensão e da carga, de modo que, ao se alimentar esta carga com uma tensão V, a
queda de tensão sobre esta e a resistência interna da fonte geradora deve ser igual.
Para determinar a impedância do piezoelétrico, foi utilizada uma década
resistiva, sendo esta regulada para que a tensão elétrica fornecida pelo PZT,
considerando apenas a impedância de entrada do equipamento de aquisição, fosse
reduzida pela metade em relação à tensão de circuito em aberto. Assim, com a
utilização dos dados experimentais, foi possível calcular, posteriormente, a máxima
potência RMS fornecida pela cerâmica piezoelétrica.
Os modos de obtenção e determinação dos valores de deformação elástica,
para cada frequência analisada, seguiu a mesma metodologia proposta na seção
2.2.3, mas, com a carga mecânica sendo aplicada pelo êmbolo do elemento
excitador.
Todos os dados experimentais foram aquisitados com uso do osciloscópio
digital Agilent, modelo DSO1012A.
3.6 AJUSTE DO MODELO NUMÉRICO
Com a obtenção dos dados experimentais, foi possível ajustar parâmetros no
modelo numérico, sendo este ajustado para a frequência em que o elemento
piezoelétrico forneceu maior potência elétrica RMS.
Com o modelo ajustado, deve ser possível fazer a previsão de quanto um
elemento piezoelétrico, com as mesmas características desta pesquisa, pode gerar
em termos de tensão elétrica, para uma dada deformação elástica.
Para realização deste ajuste foi realizada uma análise dinâmica do tipo
transiente, onde resultados experimentais foram comparados com os simulados.
A análise transiente é uma técnica utilizada para determinar, no domínio do
tempo, a resposta dinâmica da estrutura submetida a carregamentos. Neste tipo de
MATERIAIS E MÉTODOS
69
análise é importante considerar os fatores de amortecimento da estrutura. No
ANSYS, para análise transiente podem ser usados três métodos de resolução. O
método reduzido, o completo e o método por superposição de modos. Nesta
pesquisa, foi utilizado o segundo método por ser o método recomendado para
soluções com elementos piezoelétricos, pois admite soluções para todos os tipos de
sistemas, inclusive sistemas não lineares (SOUTO, 2008).
Para verificação deste ajuste, foram realizadas três novas aquisições de
tensão elétrica e deformação na bancada experimental, sendo dois com níveis de
tensão e deformação inferiores e um com nível superior ao do modelo ajustado, a
fim de detectar a variação de erro apresentado entre estas extrapolações e os
resultados apresentados na simulação.
Os elementos finitos utilizados para modelar a viga de alumínio, a cerâmica
piezoelétrica e as localizações para obtenção dos valores de tensão elétrica e
deformação seguem o mesmo método adotado na análise harmônica, apresentado
na seção 3.2.2.
No próximo capítulo os resultados das simulações e os dados experimentais
serão apresentados e discutidos.

4 RESULTADOS E DISCUSSÃO

RESULTADOS E DISCUSSÃO
71
RESULTADOS E DISCUSSÃO
Neste capítulo, serão apresentados e discutidos os resultados alcançados
nas simulações, apontando o comportamento eletromecânico prévio da estrutura
proposta, como também serão discutidos os resultados obtidos experimentalmente.
4.1 ANÁLISE MODAL
Neste trabalho, a análise modal teve por objetivo verificar as frequências
naturais, assim como os modos de vibração correspondentes em função das
dimensões de uma estrutura de viga monoengastada.
Nas primeiras análises, foram comparados os resultados de dois tipos de
elementos finitos, sendo um de viga e outro de casca, confrontando com resultados
analíticos de uma viga de alumínio monoengastada sem elemento piezoelétrico
acoplado. Posteriormente, foi realizado um refinamento na malha para verificação de
variação nos resultados apresentados anteriormente nos dois casos.
Após esta etapa, uma cerâmica piezoelétrica foi fixada na estrutura da viga de
alumínio. Com isso, novas análises foram realizadas a fim de se comparar os modos
de vibração e as frequências naturais correspondentes desta nova configuração com
a anterior.
4.1.1 COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O MÉTODO ANALÍTICO
Em um primeiro momento, foi realizada uma comparação entre o elemento
finito de viga BEAM3 e um método analítico no processo de obtenção das
frequências naturais. Os resultados comparativos para os três primeiros modos de
vibração, com as respectivas frequências naturais obtidas, e o método analítico para
a viga proposta na pesquisa são visualizadas na Tabela 5. No desenvolvimento do
modelo numérico, foi utilizado o elemento BEAM3, dividido em 101 elementos. Para
o método analítico, foi utilizada a Equação (2.17) para uma viga monoengastada,
conforme verifica-se na Figura 37.

RESULTADOS E DISCUSSÃO
72
TABELA 5 - COMPARAÇÃO ENTRE O MÉTODO ANALITICO E O ELEMENTO BEAM3 NA DETERMINAÇÃO DA FREQUÊNCIA NATURAL
FIGURA 37 – TRÊS PRIMEIROS MODOS DE VIBRAÇÃO E AS RESPECTIVAS EQUAÇÕES PARA UMA VIGA MONOENGASTADA
4
22
12)875.1(1
L
Eh
4
22
12)694.4(2
L
Eh
4
22
12)855.7(3
L
Eh
Onde ω é a velocidade angular, E é o módulo de elasticidade do material, L é
o comprimento da viga. Obtendo-se os resultados de ω1, ω2 e ω3, e adotando-se
ω=2πf, é possível determinar as frequências naturais em Hz correspondentes ao
primeiro, segundo e terceiro modo de vibração, respectivamente.
MÉTODO UTILIZADO NÚMERO DE
NÓS
NÚMERO DE
ELEMENTOS
MODOS DE
VIBRAÇÃO
FREQÜÊNCIA
NATURAL
ANALÍTICO
1
2
3
181,03 Hz
1134,58 Hz
3177,05 Hz
BEAM3
100 101
1
2
3
181,04 Hz
1134,3 Hz
3174,7 Hz

RESULTADOS E DISCUSSÃO
73
A partir dos resultados obtidos foi observado que o elemento utilizado no
desenvolvimento do modelo numérico apresentou diferença de apenas 0,005% em
relação à frequência obtida através do método analítico, considerando o primeiro
modo de vibração. Em relação ao segundo e terceiro modos de vibração, foi obtida
uma diferença de 0,02% e 0,073%, respectivamente.
Os três primeiros modos de vibração da viga utilizada no modelo numérico
são mostradas na Figura 38.
FIGURA 38 – ILUSTRAÇÃO DOS TRÊS PRIMEIROS MODOS DE VIBRAÇÃO DA VIGA ESTUDADA OBTIDOS NO ANSYS
4.1.2 COMPARAÇÃO ENTRE O ELEMENTO SHELL93 E O MÉTODO ANALÍTICO
Em uma nova etapa de simulação computacional, o tipo de elemento utilizado
foi alterado. Este procedimento se fez necessário para que os elementos fossem
comparados quanto aos modos de vibração e as frequências naturais
correspondentes. Para isso, foi utilizado o elemento finito de casca SHELL93,
dividido em 400 partes. A Tabela 6 apresenta os resultados comparativos entre os
quatros primeiros modos de vibração, com as respectivas frequências naturais
obtidas, e o método analítico para a viga proposta na pesquisa.

RESULTADOS E DISCUSSÃO
74
TABELA 6 - COMPARAÇÃO ENTRE O MÉTODO ANALITICO E O ELEMENTO SHELL93
MÉTODO UTILIZADO NÚMERO DE
NÓS
NÚMERO DE
ELEMENTOS
MODOS DE
VIBRAÇÃO
FREQÜÊNCIA
NATURAL
ANALÍTICO
1
2
3
181,03 Hz
1134,58 Hz
3177,05 Hz
SHELL93
1281 400
1
2
3
4
185,03 Hz
1131,4 Hz
1154,7 Hz
3240,6 Hz
Na Figura 39 são apresentados o primeiro, o segundo, o terceiro e o quarto
modo de vibração da viga utilizada no modelo numérico. É possível observar que o
segundo modo de vibração apresenta torção, sendo este fato explicado pelo
elemento utilizado nas simulações permitir este modo de vibração. Como o método
analítico utilizado e o elemento finito de viga BEAM3 não possuem esta
característica, este modo foi descartado nesta comparação. Assim, foi verificada a
correlação entre os primeiros modos de vibração obtidos pelos três métodos. O
terceiro e o quarto modo de vibração obtido com o elemento finito SHELL93,
correspondem, para esta viga, ao segundo e ao terceiro modo, respectivamente, do
método analítico e do método que utilizou o elemento BEAM3
FIGURA 39 - QUATRO MODOS INICIAIS DE VIBRAÇÃO OBTIDOS COM O ELEMENTO SHELL93

RESULTADOS E DISCUSSÃO
75
O elemento utilizado no desenvolvimento do modelo numérico apresentou
erro de 2,16% em relação à frequência obtida através do método analítico,
observando o primeiro modo de vibração. Em relação ao terceiro e ao quarto modo
de vibração, foi apresentado um erro de 1,77% e 2,00%, respectivamente.
4.1.3 COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O ELEMENTO SHELL93
Com os resultados apresentados, foi constatado que o elemento finito BEAM3
apresenta uma exatidão maior que o elemento finito SHELL93, quando ambos são
comparados com o resultado apresentado pelo método analítico no processo de
obtenção das frequências naturais da estrutura.
Assim, foi necessário um estudo específico para verificar se com um
refinamento da malha de elementos finitos na estrutura, utilizando o elemento
SHELL93 poderia levar a uma diminuição no erro apresentado.
Para isso, foram simuladas diversas configurações de vigas monoengastadas
sem material piezoelétrico acoplado, com comprimentos variando de 70 mm a 750
mm para cada análise proposta. A largura e a espessura foram fixadas em 22 mm e
1 mm respectivamente.
Nesta comparação, foi utilizado o elemento finito BEAM3 com 100 nós,
totalizando 101 elementos na estrutura, e o elemento finito SHELL93, com quatro
refinamentos da malha: 400, 900, 2500 e 5625 elementos.
Para análise dos resultados, foi observado apenas o primeiro modo de
vibração. A finalidade desta etapa foi verificar se os elementos finitos utilizados
apresentavam respostas semelhantes entre si para cada dimensão da viga utilizada
e a variação desta resposta para cada refinamento com a utilização do SHELL93.
Na Figura 40, é possível observar os elementos presentes na viga, utilizando
o SHELL93 com os quatros refinamentos de malha.

RESULTADOS E DISCUSSÃO
76
FIGURA 40- REFINO DA MALHA DE ELEMENTOS COM A UTILIZAÇÃO DO SHELL93
Os resultados alcançados podem ser observados na Tabela 7.
TABELA 7 - COMPARAÇÃO ENTRE O ELEMENTO BEAM3 E O ELEMENTO SHELL93
MÉTODO UTILIZADO NÚMERO DE
ELEMENTOS
COMPRIMENTO FREQÜÊNCIA
NATURAL
BEAM3 101
70 mm 166,65 HZ
SHELL93 400
900
2500
5625
70 mm 170,22 Hz
170,22 Hz
170,20 Hz
170,20 Hz
BEAM3
101
80 mm 127,59 Hz
SHELL93
400
900
2500
5625
80 mm 130,05 Hz
130,05 Hz
130,04 Hz
130,04 Hz
BEAM3
101 90 mm 100,82 Hz
SHELL93 400
900
90 mm 102,58 Hz
102,58 Hz

RESULTADOS E DISCUSSÃO
77
2500
5625
102,58 Hz
102,58 Hz
BEAM3
101
100 mm 81,661 Hz
SHELL93 400
900
2500
5625
100 mm 82,972 Hz
82,969 Hz
82,967 Hz
82,967 Hz
BEAM3
101 150 mm 36,214 Hz
SHELL93 400
900
2500
5625
150 mm
150 mm
150 mm
36,705 Hz
36,702 Hz
36,702 Hz
36,701 Hz
BEAM3
101
200 mm 20,416 Hz
SHELL93 400
900
2500
5625
200 mm 20,594 Hz
20,592 Hz
20,592 Hz
20,592 Hz
BEAM3
101
300 mm 9,07 Hz
SHELL93
400
900
2500
5625
300 mm 9,12 Hz
9,12 Hz
9,12 Hz
9,12 Hz
BEAM3
101 500 mm 3,2665 Hz
SHELL93 400
900
2500
5625
500 mm 3,4146 Hz
3,3332 Hz
3,2912 Hz
3,2828 Hz
BEAM 3
101 750 mm 1,4518 Hz
SHELL93 400
900
2500
5625
750 mm 1,566 Hz
1,4928 Hz
1,4874 Hz
1,4573 Hz

RESULTADOS E DISCUSSÃO
78
Com base nos resultados obtidos, foi verificado que não houve redução
significativa dos valores das frequências naturais, quando foi utilizado o elemento
SHELL93. Assim para a análise modal, foi escolhido o refinamento de 400
elementos, pois os recursos computacionais necessários são menores. Outra
constatação é que o comprimento da viga influencia na frequência natural.
Embora os resultados apresentados com a utilização do elemento BEAM3
corresponderam melhor ao método analítico em relação ao elemento SHELL93,
optou-se utilizar este último elemento devido a possibilidade do mesmo apresentar
características tridimensionais e apresentar a possibilidade de se interligar com
elementos sólidos, como o SOLID226.
4.1.4 ANALISE MODAL DA VIGA COM O PZT
Uma vez definido o local na viga em que o PZT deveria ser fixado, foi
realizada uma análise modal a fim de verificar a influência deste elemento em
relação às obtenções dos modos de vibração e as frequências naturais
correspondentes. Para esta análise, foi utilizado o elemento finito SHELL93 para
modelar a viga e o elemento finito SOLID226 para modelar a cerâmica piezoelétrica.
Na Figura 41 é possível observar as definições das malhas para a
modelagem da viga de alumínio com o PZT fixado.
FIGURA 41 - MALHAS DE ELEMENTOS FINITOS PARA A VIGA COM O PZT
Na Tabela 8, é apresentada uma comparação entre os resultados obtidos nas
simulações da viga de alumínio com e sem o PZT acoplado.

RESULTADOS E DISCUSSÃO
79
TABELA 8 - COMPARAÇÃO ENTRE AS FREQUÊNCIAS NATURAIS
MÉTODO UTILIZADO
NÚMERO DE
ELEMENTOS
NA VIGA
NUMERO DE
ELEMENTOS NO
PZT
MODOS DE
VIBRAÇÃO
FREQÜÊNCIA
NATURAL
SHELL93
VIGA SEM PZT
400
______
1
2
3
4
185,03 Hz
1131,4 Hz
1154,7 Hz
3240,6 Hz
SHELL93 + SOLID226
VIGA COM PZT
344
169
1
2
3
4
187,51 Hz
1166,5 Hz
1176,4 Hz
3269,8 Hz
Na análise modal realizada foi observado que, em relação às frequências
naturais dos modos de vibração, a nova estrutura apresentou uma diferença de
1,33%, 3,1%, 1,8% e 0,99% para as frequências naturais do primeiro, segundo,
terceiro e quarto modo de vibração, respectivamente. Foi constatado que com a
inserção do material piezoelétrico ocorreu uma mudança no 2º e no 3º modo de
vibração em relação à viga sem este elemento, sendo este um fator não relevante
nesta pesquisa, pois a faixa de frequência analisada está abaixo da frequência
natural correspondente ao primeiro modo de vibração.
Na Figura 42, são apresentados os 4 primeiros modos de vibração da viga
com o PZT fixado em sua estrutura.
FIGURA 42 - MODOS DE VIBRAÇÃO DA VIGA COM O PZT FIXADO

RESULTADOS E DISCUSSÃO
80
20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 1202
2.25
2.5
2.75
3
3.25
3.5x 10
-4
Frequência (Hz)
De
form
açã
o E
lástica
(m
/m)
Com esta análise foi constatado uma redução no número de elementos
presente na viga, sendo este fato explicado pela forma como os nós SHELL93 e
SOLID226 são interligados pelo ANSYS.
Com a utilização da análise modal foi possível prever os modos de vibração
da estrutura associados a uma frequência natural de vibração e com isso concluir
que para a faixa de utilização adotada, ou seja, entre 20 e 120 Hz, a estrutura
vibrará fora da frequência do primeiro modo. Em termos de recuperação de energia
a melhor situação seria excitar a estrutura exatamente na frequência natural do
sistema, pois ao ser excitado o sistema entraria em ressonância e com isso a
geração de energia elétrica seria potencializada no maior nível de deformação da
viga.
4.2 ANÁLISE HARMÔNICA
Neste trabalho, a análise harmônica teve por objetivo a verificação das
deformações elásticas impostas em um ponto da viga e a geração de tensão elétrica
no elemento piezoelétrico quando esta é submetida a uma força senoidal em uma
faixa de frequência de 20 a 120 Hz. Os resultados obtidos foram com e sem PZT
acoplado à viga.
4.2.1 ANÁLISE HARMÔNICA PARA A VIGA SEM O PZT
Para obtenção dos resultados desejados, foi considerado o método descrito
na seção 3.2.2. O gráfico 1 apresenta o comportamento da deformação elástica em
função da frequência.
GRÁFICO 1 - COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA EM FUNÇÃO DA FREQUÊNCIA

RESULTADOS E DISCUSSÃO
81
Observando o gráfico apresentado, nota-se que ocorre um crescimento na
deformação da estrutura à medida que a frequência aumenta caminhando para a
primeira frequência natural do sistema, que é de aproximadamente 185,03 Hz.
Assim, foi constatado que na frequência de 20 Hz ocorreu uma deformação de
aproximadamente 200 µm/m, e 350 µm/m na frequência de 120 Hz.
4.2.2 ANÁLISE HARMÔNICA PARA A VIGA COM O PZT
Para alcançar os valores de tensão elétrica e deformação elástica, foi
considerada a resposta dinâmica em dois nós presentes no elemento piezoelétrico,
sendo o primeiro, responsável pelos valores de deformação, localizado a
aproximadamente 11 mm do eixo x e a 19.3 mm do eixo y e o segundo, para
obtenção de tensão elétrica, localizado a aproximadamente 5.5mm do eixo x e a
19.3mm do eixo y. A carga mecânica foi aplicada no nó localizado a 67,16 mm do
eixo y e 11 mm no eixo x.
Da mesma forma, para obtenção dos valores de deformação elástica e da
tensão elétrica diretamente na viga, um nó localizado, também, a 11 mm do eixo x e
a 19.3 mm do eixo y, foi considerado. A Figura 43 apresenta a localização dos nós
escolhidos para obtenção das respostas dinâmicas desejadas na viga com o PZT
acoplado.
FIGURA 43 - LOCALIZAÇÃO DOS NÓS ESCOLHIDOS PARA A ANÁLISE HARMÔNICA
Na primeira análise realizada, foi considerado apenas o nó presente na viga.
No Gráfico 2 é apresentado comportamento da deformação elástica e da tensão
elétrica, em aberto, em função da faixa de frequência analisada.

RESULTADOS E DISCUSSÃO
82
20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 1200.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
-4
Defo
rmação E
lástica(m
/m)
Frequência
20 30 40 50 60 70 80 90 100 110 120-1
-0.5
0
0.5
1
Tensão E
létr
ica (
V)
Deformação Elástica (m\m)
Tensão Elétrica em Aberto(V)
20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 1202
2.5
3
3.5
4x 10
-4
De
form
ação E
lástica(m
/m)
Frequência ( Hz )
20 30 40 50 60 70 80 90 100 110 12016
20
24
28
32
Tensão E
létr
ica (
Vp)
Deformação Elástica (m\m)
Tensão Elétrica em aberto(V)
. GRÁFICO 2 - COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA
NA VIGA EM FUNÇÃO DA FREQUÊNCIA
Observando este gráfico é possível notar que, assim como na análise
anterior, ocorre um aumento na deformação no ponto escolhido da estrutura à
medida que a frequência aumenta.
Em relação à obtenção de tensão elétrica, mesmo com o surgimento da
deformação elástica, ficou constatado que, no nó localizado na viga, não ocorreu
geração, ou seja, apresentou como resposta valor de tensão em 0 volts, podendo
este fato ser explicado devido à face inferior do PZT estar em contato elétrico com a
viga.
Numa segunda análise, tomou-se como referência o nó localizado no topo do
PZT. No Gráfico 3 é apresentado o comportamento da deformação elástica e da
geração de tensão elétrica em função da frequência.
GRÁFICO 3 - COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA NO PZT EM FUNÇÃO DA FREQUÊNCIA
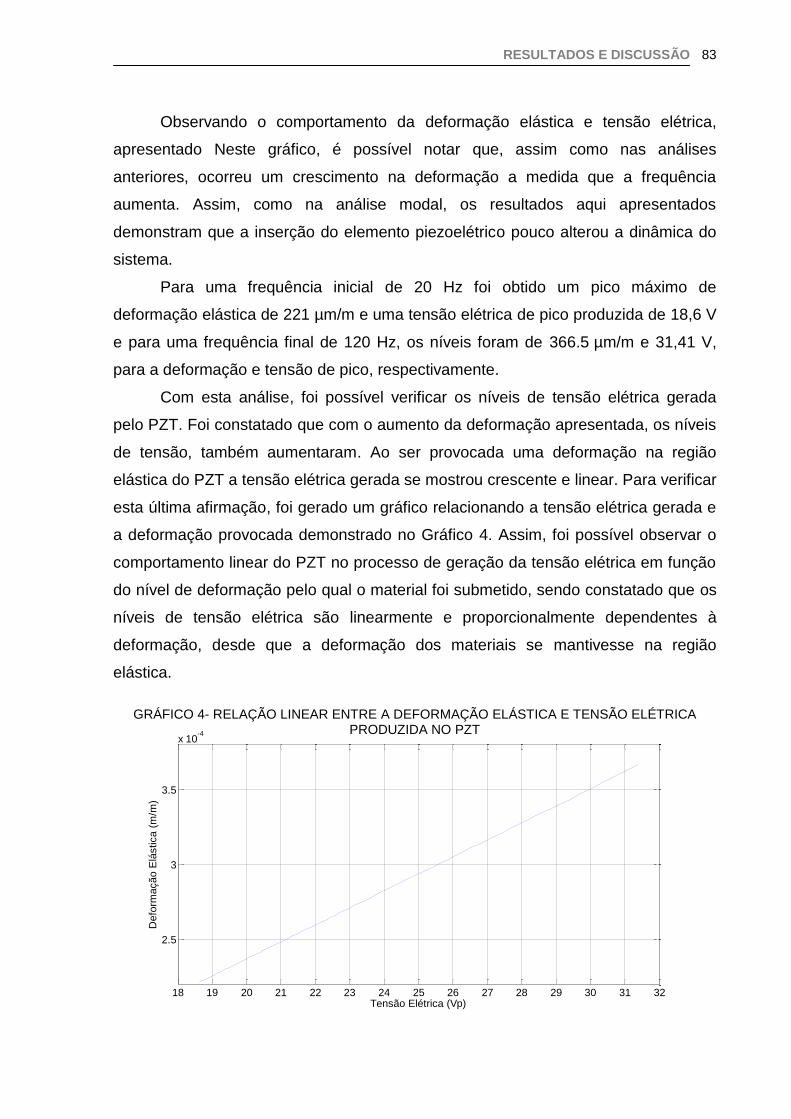
RESULTADOS E DISCUSSÃO
83
18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
2.5
3
3.5
x 10-4
Tensão Elétrica (Vp)
Defo
rmação E
lástica (
m/m
)
Observando o comportamento da deformação elástica e tensão elétrica,
apresentado Neste gráfico, é possível notar que, assim como nas análises
anteriores, ocorreu um crescimento na deformação a medida que a frequência
aumenta. Assim, como na análise modal, os resultados aqui apresentados
demonstram que a inserção do elemento piezoelétrico pouco alterou a dinâmica do
sistema.
Para uma frequência inicial de 20 Hz foi obtido um pico máximo de
deformação elástica de 221 µm/m e uma tensão elétrica de pico produzida de 18,6 V
e para uma frequência final de 120 Hz, os níveis foram de 366.5 µm/m e 31,41 V,
para a deformação e tensão de pico, respectivamente.
Com esta análise, foi possível verificar os níveis de tensão elétrica gerada
pelo PZT. Foi constatado que com o aumento da deformação apresentada, os níveis
de tensão, também aumentaram. Ao ser provocada uma deformação na região
elástica do PZT a tensão elétrica gerada se mostrou crescente e linear. Para verificar
esta última afirmação, foi gerado um gráfico relacionando a tensão elétrica gerada e
a deformação provocada demonstrado no Gráfico 4. Assim, foi possível observar o
comportamento linear do PZT no processo de geração da tensão elétrica em função
do nível de deformação pelo qual o material foi submetido, sendo constatado que os
níveis de tensão elétrica são linearmente e proporcionalmente dependentes à
deformação, desde que a deformação dos materiais se mantivesse na região
elástica.
GRÁFICO 4- RELAÇÃO LINEAR ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT

RESULTADOS E DISCUSSÃO
84
Em síntese, com a utilização da análise harmônica foi possível prever os
valores de tensão elétrica gerada associada a uma deformação e com isso nortear o
que se esperava dos resultados experimentais.
Em termos de recuperação de energia, esta análise apontou resultados em
que demonstraram uma tendência de maximização no processo de geração à
medida que a frequência de excitação se aproximava da frequência natural. Com
isso, semelhante ao discutido na análise modal, a melhor situação para potencializar
a capacidade de geração seria excitar a estrutura exatamente na frequência natural
do sistema.
Na próxima seção os resultados experimentais serão igualmente
apresentados e discutidos, fazendo-se uma relação entre os alcançados no âmbito
computacional.
4.3 RESULTADOS EXPERIMENTAIS
Para a coleta dos resultados experimentais, foi desenvolvida uma estrutura
capaz de simular condições reais de geração de energia elétrica com PZT, como
também que pudesse reproduzir as condições impostas nas simulações. Como
discutido anteriormente, o processo de geração de energia utilizando estes
elementos se dá na aplicação de uma ação mecânica que resulte na deformação
deste material. Tal aplicação pode ser proveniente de uma vibração mecânica, como
por exemplo, em ambientes industriais, automóveis, asas de avião dentre outros.
Assim, foi desenvolvida uma estrutura na qual um PZT pudesse ser submetido a
diferentes valores de frequências e de amplitudes de vibração mecânica. A
configuração desta estrutura foi apresentada na seção 3.3.
4.3.1 COMPORTAMENTO ELÁSTICO DA VIGA COM PZT
Como citado, é possível utilizar extensômetros para quantificar a deformação
imposta sobre uma estrutura, desde que este permaneça na região elástica, de
modo que qualquer variação nas partes constituintes destes sensores implica em
uma variação no valor da deformação.

RESULTADOS E DISCUSSÃO
85
0.9 1.1 1.3 1.5 1.7 1.9 2.1 2.3 2.5 2.7 2.9 3.1100
130
160
190
220
250
280
310
340
370
400
430
450
Força (N)
Defo
rmação E
lástica (
um
/m)
Dados
Linearização
Assim, buscou-se conhecer a curva característica da estrutura, com o
intuito de se obter o seu comportamento elástico para que se pudesse relacionar a
deformação sofrida em função de uma força aplicada sobre a mesma. Para isso,
foram utilizadas quatro massas com pesos distintos. Os pesos utilizados para
obtenção destes resultados e as deformações resultantes são apresentadas na
Tabela 9. No Gráfico 5 é possível observar o comportamento linear da estrutura.
TABELA 9 – MASSAS UTILIZADAS E AS RESPECTIVAS DEFORMAÇÕES MEDIDAS
GRÁFICO 5 - CURVA CARACTERISTICA DA DEFORMAÇÃO ELÁSTICA DA VIGA COM PZT
Com os resultados apresentados, foi obtida a equação geral para relacionar
a deformação elástica obtida na estrutura com o peso correspondente. Para isso, foi
necessário verificar se a resposta apresentada era exatamente linear. Assim, foi
adotada a técnica da interpolação linear, com auxilio de programas computacionais
específicos, e obtida a equação geral da viga na região elástica. Com utilização da
equação (4.1), sendo y o valor da deformação em metros por metro e x o peso, dado
PESO (g) FORÇA (N) DEFORMAÇÃO ELÁSTICA
(µm/m)
91,6 0,916 133,325
148,4 1,484 209,473
225,0 2,25 323,81
310,3 3,103 442,856

RESULTADOS E DISCUSSÃO
86
em gramas, foi possível relacionar estas duas variáveis e consequentemente,
podendo determinar a força relativa que uma massa exerce sobre a estrutura.
F67 43.187,4 (4.1)
Com a obtenção desta curva, característica ficou constatado que a força
exercida pelo excitador eletromecânico (Shaker) provocou uma deformação dentro
da região elástica da estrutura.
4.3.2 IDENTIFICAÇÃO DA FREQUÊNCIA NATURAL DA ESTRUTURA
EXPERIMENTAL
Com a utilização da análise modal, foi possível estimar as frequências
naturais do sistema, contudo estas simulações não consideravam a influência do
acoplamento mecânico exercida pela inserção do elemento excitador. Para fazer a
aquisição destas frequências foi realizado um teste de impacto, que consiste em um
impacto com martelo sobre a estrutura sendo observada a resposta dinâmica
resultante. Neste caso, a estrutura irá responder dinamicamente em toda a faixa de
frequência, destacando suas frequências de ressonância. Para a captura desse
sinal, foi utilizado o próprio PZT gerador de tensão conectado na placa da aquisição
de dados e, em seguida, foi aplicada uma FFT (Transformada Rápida de Fourier)
para realização das análises. A Figura 44 demonstra o esquema utilizado nesta
etapa e o Gráfico 6 apresenta os resultados alcançados.
FIGURA 44 - ESQUEMA PARA IDENTIFICAÇÃO DA FREQUÊNCIA NATURAL DO SISTEMA ACOPLADO

RESULTADOS E DISCUSSÃO
87
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 2000
0.5
1
1.5
2
2.5x 10
-3
Frequência (Hz)
Am
plit
ud
e d
e T
en
sã
o (
V)
135 145 155 165 175 185 195 205 215 225 235 2450
1
2
3
4
5
6
7
8
9
10
Frequência (Hz)
Am
plit
ud
e d
e T
en
sã
o(V
)
GRÁFICO 6 - RESPOSTA NATURAL DA ESTRUTURA COM ELEMENTO EXCITADOR
Após a análise desenvolvida, constatou-se que a frequência natural do
sistema é de aproximadamente 75Hz. Uma das possibilidades desta variação na
frequência natural no primeiro modo, em relação aos resultados obtidos nas
simulações, seria a influência do elemento excitador (shaker) na dinâmica da
estrutura. Para verificar esta última afirmação, foi realizado o teste anterior sem o
elemento excitador, sendo o resultado apresentado no Gráfico 7.
GRÁFICO 7 - RESPOSTA NATURAL DA ESTRUTURA SEM O ELEMENTO EXCITADOR
A partir dos resultados apresentados no Gráfico 7 ficou evidenciada a
influência do excitador eletromagnético sobre a dinâmica do sistema, visto que a

RESULTADOS E DISCUSSÃO
88
20 30 40 50 60 70 80 90 100 110 1201
1.5
2
2.5
3
3.5
4x 10
-4
De
form
ação(m
/m)
Frequência(Hz)
20 30 40 50 60 70 80 90 100 110 1208
9
10
11
12
13
14
15
16
17
18
19
Tensão E
létr
ica (
Vp)
Deformação(m/m)
Tensão Elétrica (Vp)
frequência natural de primeiro modo era 187,51 Hz na simulação e
aproximadamente 189 Hz no teste experimental, resultando numa diferença de
0,79% entre estes dois ambientes.
4.3.3 COMPORTAMENTO ELETROMECÂNICO
A partir das considerações adotadas na seção 3.5, foram realizadas as
medições de tensão elétrica gerada e de deformação sobre o PZT. Para as análises
das características elétricas deste material e a sua capacidade de geração, foi
necessário obter dados que relacionassem a tensão de pico gerada com PZT em
aberto, considerando a impedância de entrada do equipamento de medição (10 MΩ),
a tensão elétrica RMS e a máxima potência elétrica fornecida a uma carga, como
também, a deformação elástica apresentada em função da frequência de vibração
mecânica exercida sobre a estrutura. O Gráfico 8 relaciona a tensão de pico em
aberto e a deformação elástica em função da frequência.
GRÁFICO 8 - COMPORTAMENTO DA DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA, EM ABERTO, NO PZT EM FUNÇÃO DA FREQUÊNCIA
A partir deste gráfico, pode ser observado que quando a estrutura é excitada
com uma frequência em 20 Hz o PZT sofre uma deformação elástica de

RESULTADOS E DISCUSSÃO
89
20 30 40 50 60 70 80 90 100 110 1200
1
2
3
4
5
6
7
8
9
Tensão E
létr
ica (
Vrm
s)
Frequência(Hz)
20 30 40 50 60 70 80 90 100 110 1200
1
2
3
4
5
6
7
8x 10
4
Impedância
(ohm
)
Tensão Elétrica (Vrms)
Impedância (ohm)
aproximadamente 272 µm/m e gera uma tensão de pico de 12,4 volts. Entre 20 Hz e
25 Hz ocorre uma redução na deformação sofrida e na tensão elétrica gerada, sendo
este fato explicado pela própria resposta natural da estrutura apresentada no Gráfico
6. A partir de 25 Hz, a deformação elástica e a tensão gerada voltam a crescer
atingindo seu potencial elétrico máximo na frequência de 75 Hz, o qual corresponde
à frequência natural de vibração, gerando uma tensão de pico de 17,2 V para uma
deformação de 387,97 µm/m. A partir desta frequência, os valores de tensão e
deformação decrescem atingindo 8,4 V de pico para uma deformação sofrida de
173,35 µm/m na frequência de 120 Hz. Após esta etapa, foi determinada a relação
entre a impedância do elemento piezoelétrico e a tensão RMS fornecida a uma
carga, correspondente à impedância do elemento gerador, na faixa de frequência
adotada. No Gráfico 9 é possível observar esta relação.
GRÁFICO 9 - COMPORTAMENTO DA IMPEDÂNCIA E TENSÃO ELÉTRICA RMS FORNECIDA EM FUNÇÃO DA FREQUÊNCIA
A partir do gráfico, pode ser observado que a dinâmica no processo de
geração foi idêntica aos resultados obtidos anteriormente. Quando a estrutura é
excitada com uma frequência em 20 Hz, o PZT gera uma tensão Vrms de 4,38 V
sobre uma carga de 70,99 kΩ; a tensão RMS cresce juntamente com a frequência
atingindo seu potencial máximo em 75 Hz, no qual fornece 6,08 Vrms a uma carga
de 19,69 kΩ e por fim, após esta frequência ocorre um decréscimo na geração

RESULTADOS E DISCUSSÃO
90
20 30 40 50 60 70 80 90 100 110 1200
0.5
1
1.5
2
x 10-3
Potê
ncia
(W
)
Frequência(Hz)
20 30 40 50 60 70 80 90 100 110 120
1
2
3
4
5x 10
-4
De
form
ação E
lástica(m
/m)
Potência (W)
Deformação Elástica(m/m)
atingindo o fornecimento de 2,96 Vrms sobre uma carga de 13,44 kΩ na frequência
de 120 Hz. Em relação à impedância, foi detectado que a mesma decresce à
medida que a frequência cresce, sendo este fato explicado pela característica
capacitiva dos elementos piezoelétricos. No Gráfico 10 é possível observar a relação
entre a potência elétrica fornecida a carga e a deformação imposta sobre o elemento
piezoelétrico em função da frequência.
GRÁFICO 10 - COMPORTAMENTO DA POTÊNCIA ELÉTRICA RMS FORNECIDA E DA DEFORMAÇÃO ELÁSTICA EM FUNÇÃO DA FREQUÊNCIA
De acordo com os resultados apresentados, a potência fornecida apresenta
comportamento dinâmico semelhante aos resultados obtidos anteriormente. O
gráfico demonstra uma variação maior na potência fornecida na faixa compreendida
entre 20 Hz e 75 Hz, no qual obtêm-se 1,877 mW como o valor máximo, e uma
variação menor na faixa compreendida entre 75 Hz e 120 Hz, indicando a influência
da frequência da vibração forçada sobre o processo de geração de energia elétrica.
O Gráfico 11 apresenta a comparação entre os comportamentos da tensão
elétrica e da potência RMS fornecida às cargas em função da frequência. Os
resultados obtidos nesta seção encontram-se resumidas na Tabela 10.

RESULTADOS E DISCUSSÃO
91
20 30 40 50 60 70 80 90 100 110 1200
0.5
1
1.5
2
2.5
3x 10
-3
Potê
ncia
(W
)
Frequência(Hz)
20 30 40 50 60 70 80 90 100 110 1200
1
2
3
4
5
6
7
Tensão E
létr
ica (
Vrm
s)
Potência (W)
Tensão Elétrica (Vrms)
GRÁFICO 11 - COMPORTAMENTO DA POTÊNCIA ELÉTRICA RMS E DA TENSÃO ELÉTRICA RMS EM FUNÇÃO DA FREQUÊNCIA
TABELA 10 - RESULTADOS EXPERIMENTAIS OBTIDOS
Frequência
(Hz)
Deformação
(µm/m)
Tensão Elétrica
(em aberto)
(Vpp)
Impedância
Estimada
(kΩ)
Potência Elétrica
RMS
(mW)
20 272,4 24,8 70,99 0,270241
25 264,15 24 58,88 0,30532
30 280,66 25,2 44,9 0,44103
35 288,91 26 39,99 0,526834
40 309,55 28 35,99 0,67806
45 321,93 28,8 31,99 0,80988
50 321,93 28,8 30,2 0,85788
55 330,19 29,2 26,9 0,98979
60 338,44 30,8 24,7 1,19812
65 346,70 31,6 22,5 1,38384
70 354,95 32,8 21,2 1,581325
75 387,97 34,4 19,69 1,877245
80 354,95 33,6 18,8 1,87047

RESULTADOS E DISCUSSÃO
92
24 25 26 27 28 29 30 31 32 33 34 352.6
2.8
3
3.2
3.4
3.6
3.8
4x 10
-4
Tensão Elétrica (Vpp)
Defo
rmação E
lástica(m
/m)
Comportamento
Linearização
85 354,95 33,2 18,5 1,85619
90 338,44 31,2 16,6 1,82892
95 313,68 29,2 15,6 1,7067
100 272,4 26 14,6 1,443
105 239,39 22,8 13,94 1,16505
110 214,62 20 13,8 0,90296
115 185,73 17,6 13,44 0,71965
120 173,35 16,8 13,44 0,65190
Após a obtenção destes resultados, foi necessário verificar se o gerador
apresentava dependência linear entre a tensão elétrica gerada em função da
deformação elástica. Para isso, foram obtidas duas curvas características: sendo a
primeira para a faixa de frequência abaixo da frequência natural do sistema e a
segunda para a faixa de frequência acima desta frequência. Nos Gráficos 12 e 13, é
possível observar os gráficos que relacionam estas variáveis na primeira e na
segunda análise, respectivamente, observando a linearidade paras as frequências
analisadas.
GRÁFICO 12 - RELAÇÃO ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT NA FAIXA DE 20 A 75 Hz

RESULTADOS E DISCUSSÃO
93
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 341.5
2
2.5
3
3.5
4
4.5
5x 10
-4
Tensão Elétrica (Vpp)
Defo
rmação E
lástica(m
/m)
Comportamento
Linearização
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
GRÁFICO 13 - RELAÇÃO ENTRE A DEFORMAÇÃO ELÁSTICA E TENSÃO ELÉTRICA PRODUZIDA NO PZT NA FAIXA DE 75 A 120 Hz
Com base nos dados experimentais, foi constatado que o valor máximo de
tensão, potência e deformação alcançada ocorreu quando a estrutura era submetida
a uma vibração mecânica com frequência igual à da frequência natural do sistema.
No Gráfico 14 são apresentados os resultados alcançados na frequência de 75 Hz
no domínio do tempo. Com a obtenção dos dados experimentais, e considerando a
relação linear força-deformação apresentada na seção 4.3.1, foi possível estimar o
valor de 2,71N como a amplitude da força aplicada nas simulações podendo
estabelecer um parâmetro de comparação entre o modelo numérico e o
experimental.
GRÁFICO 14 - SINAIS DE TENSÃO E DEFORMAÇÃO ELÁSTICA OBTIDAS EXPERIMENTALMENTE PARA A FREQUÊNCIA DE 75 Hz

RESULTADOS E DISCUSSÃO
94
Neste gráfico, é apresentada a comparação entre os sinais de tensão em
aberto (10 MΩ) e com a carga resistiva (19,69 kΩ ) demonstrando que com a carga
utilizada a tensão é aproximadamente a metade da tensão em aberto. Além disso, é
possível visualizar o comportamento da deformação, verificando que o
comportamento da tensão elétrica gerada se mostrou idêntica à de deformação,
constatando a dependência entre as duas variáveis. Como informado anteriormente,
para esta frequência foi gerado uma tensão de pico a pico, em aberto, de 34,4 Volts,
e uma tensão RMS de 6,08 V, sobre a carga de 19,69 kΩ, com uma deformação
elástica de 387,97 µm/m. Os gráficos gerados com os dados experimentais das
demais frequências se encontram no Apêndice 6.
Com a utilização do aparato experimental proposto, foi possível gerar
1,877mW (RMS), sob uma carga de 19,69 KΩ, quando o sistema era submetido a
uma frequência de vibração próxima à frequência natural do sistema.
Fang et al. (2006) apresentaram uma configuração experimental em que foi
fornecida uma potência elétrica de 2,16 µW para uma carga de 21.4 KΩ, quando o
sistema era submetido a uma frequência de vibração idêntica à frequência natural.
Em outra pesquisa, Barbosa (2013) desenvolveu um gerador que utilizava uma viga
piezoelétrica do tipo MFC (micro fiber composite), sendo constatada a relação da
amplitude de vibração com os níveis de geração de tensão elétrica. Nesta
configuração, foi possível fornecer 1,86 mW para uma carga de 8,14 kΩ, quando
submetido a uma frequência de vibração de 17,3 Hz. Yang et al (2013) apresentou
um gerador em que se utilizava a força dos ventos para geração de vibração
mecânica, para isso adotou-se um elemento piezoeletrico acoplado a uma viga como
elemento gerador. Foi constatada a influência da velocidade dos ventos no processo
desta geração, ficando evidenciado que com o aumento desta velocidade ocorria um
maior fornecimento de potência elétrica a uma carga devido ao aumento da
amplitude da vibração fornecida ao sistema. Nesta configuração, foi fornecida uma
potência de 5,5 mW a uma carga de 105 kΩ, quando submetido a uma velocidade
de vento de 6 m/s e 8,4 mW para esta mesma carga, para uma velocidade de 8 m/s.
Conforme apresentadas no capítulo 2, diversas são as configurações
utilizadas por pesquisadores no processo de transformação de energia mecânica,
através de vibração, em energia elétrica, e influência da frequência desta vibração
neste processo. Contudo, alguns destes autores detectaram que as amplitudes

RESULTADOS E DISCUSSÃO
95
destas vibrações têm influência direta no processo de geração de energia elétrica
quando se utiliza elementos piezoelétrico, mas sem determinar ou estimar os valores
das deformações elásticas e sua relação com esta capacidade de geração. Sendo
esta uma das motivações e resultados apresentados neste trabalho de pesquisa.
4.4 AJUSTE DO MODELO NÚMERICO
Para realização do ajuste do modelo foi atribuído um fator de amortecimento
de 0.0007, de modo que a forma do sinal obtida na saída do PZT, no âmbito
computacional, fosse idêntica à do modelo experimental.
Comparando-se os sinais experimentais com os simulados, foi possível
ajustar o modelo. Para esta etapa, foram escolhidos os sinais obtidos na frequência
de 75 Hz, ou seja, na frequência em que ocorreu a máxima geração, de modo que
as amplitudes de deformação elástica e tensão elétrica alcançados no modelo
numérico tivessem valores próximos ao experimental.
Para o ajuste, foram realizadas pequenas alterações no Coeficiente de
Poisson e na propriedade piezoelétrica d33. A Tabela 11 apresenta a comparação
entre os parâmetros do PZT antes e depois do ajuste realizado. As modificações
destes parâmetros foram realizadas com objetivo de se obter o menor erro possível
entre a tensão elétrica produzida e a deformação obtida no modelo experimental. O
programa desenvolvido para esta análise pode ser observado no Apêndice 7.
TABELA 11 - COMPARAÇÃO ENTRE OS PARAMETROS DO PZT ANTES E DEPOIS DO AJUSTE
PARAMETROS Unidades SEM AJUSTE COM AJUSTE
d31 m/V ou C/N 185x10e-12 185x10e-12
Coeficiente piezoelétrico d32 m/V ou C/N 185x10e-12 185x10e-12
d33 m/V ou C/N -435x10e-12 -400x10e-12
Fator de Amortecimento - - 0 0.0007
Coeficiente Elástico
YE1 N/m² 5.9x10e+10 5.9x10e+10
YE3 N/m² 5,1x10e+10 5,1x10e+10
Coeficiente de Poisson V - 0,34 0,35

RESULTADOS E DISCUSSÃO
96
Nos Gráficos 15a e 15b se apresentam uma comparação entre os sinais da
deformação elástica e da tensão elétrica em aberto, respectivamente, do modelo
numérico e experimental, onde é constatado que o erro percentual máximo entre as
amplitudes dos sinais simulados e experimentais é de 0,35%, para a tensão elétrica
e de 0,77% para a deformação elástica.
GRÁFICO 15 - COMPARAÇÃO ENTRE AS AMPLITUDES DOS SINAIS DE TENSÃO (a) E DEFORMAÇÃO ELÁSTICA (b) APÓS AJUSTE DO MODELO NÚMERICO
(a)
(b)
Para a verificação deste ajuste, foram realizadas aquisições de tensão
elétrica e deformação, com níveis de deformação inferior e superior ao do modelo
ajustado em 75 Hz. A finalidade desse experimento foi verificar se com níveis
diferentes de deformação os valores experimentais e simulados continuavam em
acordo. O valor da força relativa a ser aplicada na simulação foi obtido em função
dos valores de deformação obtidos experimentalmente e relacionados na Equação

RESULTADOS E DISCUSSÃO
97
(4.1). A variação desta deformação foi exercida pela carga mecânica fornecida pelo
elemento excitador. Na Tabela 12 e 13 estão relacionados os valores da força
relativa com os deformação elástica e tensão elétrica de pico a pico gerada com os
erros percentuais máximos obtidos entre si, respectivamente.
TABELA 12 - COMPARAÇÃO ENTRE OS RESULTADOS APRESENTADOS PARA O MODELO AJUSTADO E EXTRAPOLAÇÕES COM OS DADOS EXPERIMENTAIS DE DEFORMAÇÃO
TABELA 13 - COMPARAÇÃO ENTRE OS RESULTADOS APRESENTADOS PARA O MODELO AJUSTADO E EXTRAPOLAÇÕES COM OS DADOS EXPERIMENTAIS DE TENSÃO ELÉTRICA
Nos Gráficos 16a, 16b e 16c é possível observar os sinais da tensão elétrica,
assim como o da deformação para a primeira, segunda e terceira extrapolação,
respectivamente.
GRÁFICO 16- COMPARAÇÃO ENTRE AS AMPLITUDES DOS SINAIS DE TENSÃO E
DEFORMAÇÃO ELÁSTICA APÓS EXTRAPOLAÇÃO DO MODELO NUMERICO AJUSTADO
Ext. 1
(a)
Força
(N)
Def. Simulado
(µm/m)
Def. Experimental
(µm/m)
Erro Def.
( % )
Extrapolação 1 2,48 357,806 354,95 0,8
Extrapolação 2 2,652 382,610 379,71 0,76
Ajustado 2.71 390,989 387,97 0,77
Extrapolação 3 2,767 399,212 396,22 0,75
Força
(N)
Tensão Simul.
(Vpp)
Tensão Simul.
(Vpp)
Erro Volt.
( % )
Extrapolação 1 2,48 32,4 31,5918 2,49
Extrapolação 2 2,652 34 33,78 0,63
Ajustado 2.71 34,4 34,5217 0,35
Extrapolação 3 2,767 36 35,2477 2,1

RESULTADOS E DISCUSSÃO
98
Ext. 1
(a)
Ext. 2
(b)
Ext. 2
(b)
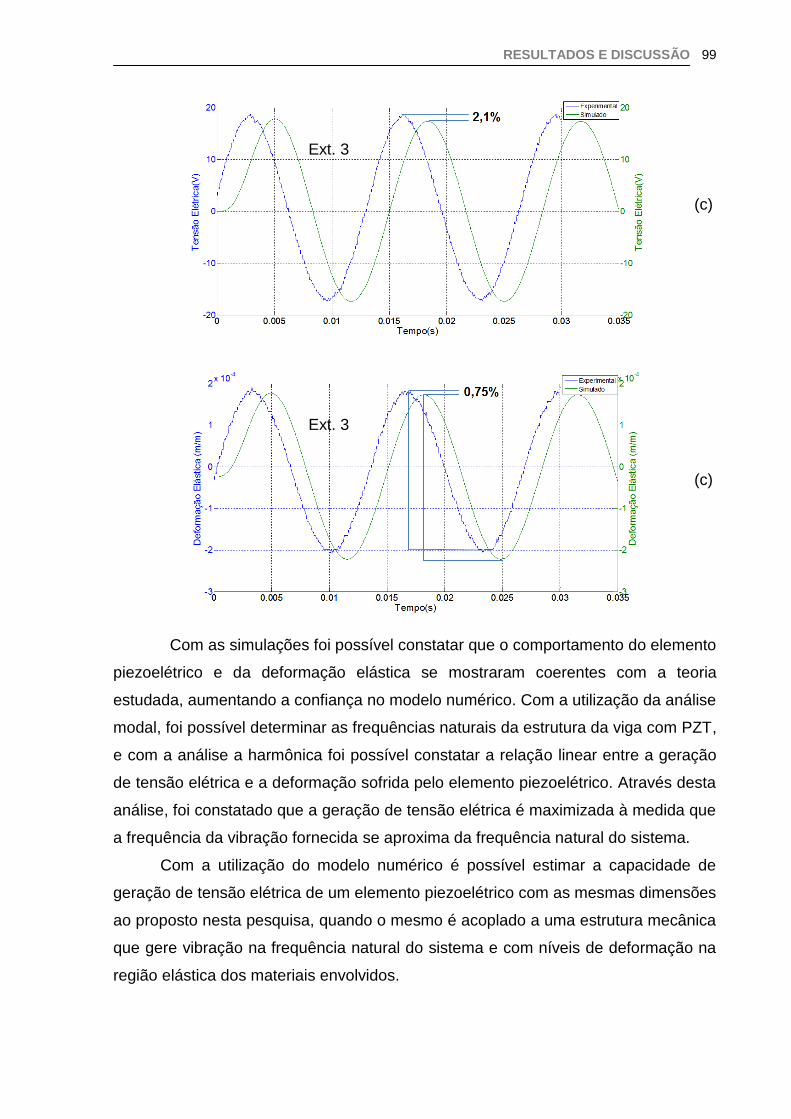
RESULTADOS E DISCUSSÃO
99
Ext. 3
(c)
Ext. 3
(c)
Com as simulações foi possível constatar que o comportamento do elemento
piezoelétrico e da deformação elástica se mostraram coerentes com a teoria
estudada, aumentando a confiança no modelo numérico. Com a utilização da análise
modal, foi possível determinar as frequências naturais da estrutura da viga com PZT,
e com a análise a harmônica foi possível constatar a relação linear entre a geração
de tensão elétrica e a deformação sofrida pelo elemento piezoelétrico. Através desta
análise, foi constatado que a geração de tensão elétrica é maximizada à medida que
a frequência da vibração fornecida se aproxima da frequência natural do sistema.
Com a utilização do modelo numérico é possível estimar a capacidade de
geração de tensão elétrica de um elemento piezoelétrico com as mesmas dimensões
ao proposto nesta pesquisa, quando o mesmo é acoplado a uma estrutura mecânica
que gere vibração na frequência natural do sistema e com níveis de deformação na
região elástica dos materiais envolvidos.

5 CONCLUSÕES

CONCLUSÕES
101
CONCLUSÕES
Nesta pesquisa foi explorado o efeito piezoelétrico direto, que transforma
energia mecânica em energia elétrica a partir de um PZT acoplado a uma viga
retangular de alumínio quando submetida a uma vibração forçada. Os estudos foram
concentrados na geração de tensão e determinação da potência elétrica em função
da deformação elástica sofrida pelo material baseado em simulações e resultados
experimentais.
A utilização das simulações computacionais se mostrou relevante no
desenvolvimento da pesquisa por proporcionar um conhecimento prévio dos modos
de vibração e das frequências naturais da estrutura utilizada, como também
determinar relações de geração de tensão elétrica e deformação mecânica do
piezoelétrico.
Através da análise modal foi possível conhecer as frequências naturais do
sistema com e sem o elemento piezoelétrico gerador de tensão elétrica.
Com a utilização da análise harmônica, foi possível obter as respostas
eletromecânicas do modelo, no domínio da frequência, detectando que os níveis de
deformação e, por consequência, os de tensão elétrica obtidos pelo gerador
aumentam à medida que a frequência da excitação mecânica se aproximava da
frequência natural do sistema. Foi constatado que os níveis de tensão elétrica
obtidos são linearmente proporcionais à deformação elástica imposta, desde que a
deformação dos materiais os mantenha na região elástica.
Com o auxílio do protótipo experimental, foi possível verificar a influência que
o elemento gerador de vibração exerce sobre a dinâmica do sistema, sendo
constatada uma diminuição na frequência natural quando comparada com a
estrutura desacoplada do excitador eletromecânico. Com a utilização dos sensores
do tipo extensômetros, foram determinados os níveis de deformações ocorridos e,
relacionando com os níveis de tensão elétrica gerados, foi verificada a resposta
linear entre estes dois parâmetros.
Ficou comprovado que o ponto máximo de deformação elástica e por
consequência de geração de tensão elétrica ocorreu quando a estrutura foi excitada
mecânicamente a uma frequência próxima à natural.

CONCLUSÕES
102
O gerador desenvolvido ao ser excitado mecanicamente a 75 Hz, sofreu uma
deformação máxima de 387,97 µm/m, gerando uma tensão elétrica em aberto de
34.4 Vpp, e fornecendo uma potência elétrica RMS de 1,877mW para uma carga
resistiva de 19,69kΩ. Esse resultado demonstrou a capacidade de geração de
energia elétrica a partir de pequenas deformações na placa de PZT retangular.
Com os resultados experimentais, foi possível ajustar o modelo numérico na
frequência em que ocorria o nível máximo de deformação elástica, possibilitando a
estimação do nível de tensão elétrica gerado em função da deformação elástica
sofrida, contribuindo para a literatura quando se pretende relacionar estas duas
variáveis.
Conforme discutido na literatura e comprovado nesta pesquisa, os materiais
piezoelétricos apresentam grande potencial como coletores de energia mecânica e
conversores em energia elétrica. Percebe-se que estes dispositivos geradores, pelas
pequenas potências elétricas geradas, são adequados como fonte de alimentação
de equipamentos de baixo consumo energético, como por exemplo, sensores e
demais sistemas baseados na tecnologia MEMS.
5.1 SUGESTÕES DE TRABALHOS FUTUROS
Esta pesquisa investigou a geração de energia elétrica de um PZT acoplado
a uma viga de alumínio quando excitada mecanicamente, avaliando-se a tensão
elétrica e a potência elétrica fornecida em função da deformação elástica. Apesar do
experimento ter fornecido resultados importantes, é necessário realizar novas
pesquisas a fim de melhorar a capacidade de geração deste gerador. Portanto,
segue como sugestão para novos trabalhos:
Desenvolver estudos com vigas com formatos diferentes e compostas por outros
materiais, objetivando verificar os níveis de deformação e geração de energia
elétrica;
Analisar a capacidade de geração do material piezoelétrico quando conectado a
cargas reativas, relacionando a influência exercida por estes elementos na dinâmica
do sistema;

CONCLUSÕES
103
Analisar a dinâmica e a capacidade de geração do protótipo quando acoplado
mais de um PZT em sua estrutura, interligados em associação série e/ou paralelo;
Avaliar circuitos retificadores capazes de transformar o sinal alternado gerado em
sinal contínuo, bem como suas configurações (meia-onda, onda completa ou ponte).

REFERÊNCIAS
104
REFERÊNCIAS
AL-HAZMI, M. W. Finite element analysis of cantilever plate structure excited by Patches of piezoelectric actuaturs. 11th Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems, p. 809 - 814. ITHERM 2008. ANDRADE, A. R. Atenuador passivo de vibrações mecânicas em estruturas flexíveis utilizando circuito ressonador baseado em PZT. Dissertação (Mestrado Em Engenharia Mecânica) – Centro de Tecnologia, Universidade Federal Da Paraíba, Brasil-2008 ANSYS 8.0. Ansys release 8.0 documentation (tutorials), U.S.A. 2003. ANSYS 12.0, Ansys release 12.0 documentation (tutorials),U.S.A. 2009. BALBINOT, A.; BRUSAMARELLO, V. J.; Instrumentação e fundamentos de medidas, v.2, 2º ed., Brasil: LTC, 2011. BALLATO, A. Piezoelectricity: old effect, new thrusts. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, New York, v. 42, n. 5, p. 916-926, 1995. BARBOSA, W. O. V. Investigação experimental da geração de energia elétrica em uma viga piezoelétrica excitada mecanicamente. Dissertação (Mestrado em Ciências Mecânicas). Faculdade de Tecnologia. Universidade de Brasília, 2013. BURR-BROWN CORPORATION. Datasheet INA122. USA,1997. CALLISTER, W. D.; Fundamentos da ciência e engenharia de materiais: uma abordagem integrada 2º ed. Rio de Janeiro: LTC,2006. DEMIAN,G.S. Vibrações ressonantes não-lineares em estruturas tipo viga sob excitação paramétrica e combinada. Tese ( Doutorado em Engenharia Mecânica ) – Escola de Engenharia de São Carlos, Universidade de São Paulo. Brasil- 2006. ENGEL, T. G.; KEAWBOONCHUAY,C. Maximum Power Generation in a Piezoelectric Pulse Generator. IEEE Transactions on Plasma Science, vol. 31, no. 1, p. 123-128. 2003.
FANG H. B.; LIU J. Q.; XU, Z. Y.; DONG, L.; WANG, L.; CHEN, D.; CAI, B. C.; LIU, Y. Fabrication and Performance of MEMS-based piezoelectric Power generator for vibration energy harvesting. Microelectronics Journal, v.37, n.11, p.1280-1284. 2006.
GONÇALVES T. R. S. Colheita Piezoeléctrica de Energia. Dissertação ( Mestrado em Energias Renováveis) -Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa, 2011.

REFERÊNCIAS
105
GUAN, Q. C.; JU, B.; XU, J. W.; YONG, B. L.; FENG, Z. H. Improved strain distribution of cantilever piezoelectric energy harvesting devices using H-shaped proof masses. Journal of Intelligent Material Systems and Structures. v. 24, n.9, p.1059-1066. 2013.
KATZIR, S. The Beginnings of Piezoelectricity: A study in Mundane Physics. Dordrecht: Springer, 2006.
KOYAMA, D; NAKAMURA, K. Electric power generation using a vibration of a polyurea piezoelectric thin film. International Ultrasonics Symposium Proceedings, p.938-941, 2008. LIANG, J.; LIAO, W. Impedance modeling and analysis for piezoelectric energy harvesting systems. IEEE/ASME Transactions on Mechatronics, v.17, n.6, p.1145-1157. 2012. LIU, H.; LEE, C.;KOBAYASHI, T.; TAY, C. J.; QUAN, C. A new S-shaped MEMS PZT cantilever for energy harvesting from low frequency vibrations below 30 Hz. Microsyst Technol, v.18, p. 497-506. 2012. MAIO, C. E. B. Técnicas para monitoramento de integridade estrutural usando sensores e atuadores piezoeletricos. Dissertação (Mestrado em Engenharia Mecânica) – Escola de Engenharia de São Carlos, Universidade de São Paulo, Brasil-2011 MALLIK, N.; RAY, M. C.; “Exact solutions for the analysis of piezoelectric fiber reinforced composites as distributed actuators for smart composite plates”, International Journal of Mechanics and Materials in Design, v. 2, p. 81-9, 2005. MARKUS, O. Circuitos Elétricos: Corrente alternada e contínua. 1º ed. Brasil: Erica, 2001. MEIROVITCH, L. Analytical methods in vibrations. New York: The Macmillan Company, 1967. MENEZES, J. P. C. Análise Teórica e Experimental de um Método Interferométrico de Detecção de Fase Óptica, Auto-Consistente e com Elevada Faixa Dinâmica, Aplicado à Caracterizacao de Atuadores Piezoeletricos Flextensionais. Dissertação (Mestrado em Engenharia Elétrica) – Faculdade de Engenharia, Universidade do Estado do Rio de Janeiro, Brasil-2009. MOHEIMANI, S. O. R.; FLEMING, A. J. Piezoelectric transducers for vibration control and damping, Germany, Springer Science, 2006. NASH, W. A.; Resistências dos materiais 2º ed. São Paulo: Mc-Graw-Hill dp Brasil.

REFERÊNCIAS
106
NAYFEH,A.H;PAI,P.F; Linear and nonlinear structural mechanics. New York: Wiley & Sons, 2004. SAKAMOTO, S. M. S.; Sensor em fibra óptica aplicado à caracterização de atuadores piezoelétricos flextensionais. Dissertação (Mestrado em Engenharia Elétrica)- Faculdade de Engenharia de Ilha Solteira da Universidade Estadual Paulista – UNESP, Brasil-2006. SETO, W.W. Vibrações mecânicas- coleção Schaum. Brasil: Mcgraw-Hilll, 1971.
SHEBEEB A.; SALLEH H. Effect of Cantilever Shape on the Power Output of a Piezoelectric Bimorph Generator. IEEE International Conference on Semiconductor Electronics (ICSE), p.275-278, June-2010. SOUTO, C. R. Controle ativo de vibração em placas usando atuadores piezoelétricos - aplicação a atenuação de ruídos em ambientes fechados. Tese (Doutorado em Engenharia Mecânica) – Centro de Tecnologia, Universidade Federal da Paraíba, Brasil-2008. STARNER, T.; PARADISO, J. A. Human Generated Power for Mobile Electronics. Conference on Low Power Electronics Design, v. 45, p.1-35, 2004 THOMSON, W. T. Teoria da vibração com aplicações. Brasil: Interciência, 1978. VIVES, A. A. Piezoelectric transducers and aplications. 2º ed. New York: Springer, 2008. WANG, X.; Ju-Zheng WANG,J.; Gao,Z.; ZHU, X. Simulation and Experimental Study on Active Vibration Control of Piezoelectric Smart Plate Based on ANSYS. 2nd International Conference on Advanced Computer Control (ICACC), v.1, p.257-260, 2010. XIAOJIN, Z.; MIAO, Z.; ZHIYUAN,G.; ZHIYAN, C. Analysis of Active Vibration Control for Piezoelectric Intelligent Structures by ANSYS and MATLAB. International Conference on Computer Application and System Modeling (ICCASM), v.4, p.184-188, 2010. XU, C.; AKIYAMA, M.; NONAKA, K.; WATANABE,T. Electrical Power Generation Characteristics of PZT Piezoelectric Ceramics. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 45, n. 4, p.1065-1070, 1998. YANG, B; YUN, K. Piezoelectric shell structures as wearable energy harvesters for effective power generation at low-frequency movement. Sensors and Actuators A: Physical, v.188, pag.427-433. 2012.

REFERÊNCIAS
107
YANG, Y.; ZHAO, L.; TANG, L. Comparative study of tip cross-sections for efficient galloping energy harvesting. Applied Physics Letters, v.102, 064105, 2013.
ZHU,M.; WORTHINGTON, E.; NJUGUNA, J. Analyses of power output of piezoelectric energy-harvesting devices directly connected to a load resistor using a coupled piezoelectric-circuit finite element method. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control. v .56, n.7, p.1309-1317, 2009.
ZHU, M.; WORTHINGTON, E.; and TIWARI, A. Design Study of Piezoelectric Energy-Harvesting Devices for Generation of Higher Electrical Power Using a Coupled Piezoelectric-Circuit Finite Element Method. Ieee transactions on ultrasonics, ferroelectrics, and frequency control, v. 57, n. 2, p.427-437, 2010.

APÊNDICE 1

APÊNDICE 1
109
APÊNDICE 1 - LINHAS DE CÓDIGOS PARA OBTENÇÃO DOS MODOS DE VIBRAÇÃO E DAS FREQUÊNCIAS NATURAIS DE UMA VIGA DE ALUMINIO PELO ELEMENTO BEAM3 (ANSYS)
FINISH /CLEAR /TITLE, Analise Modal /PREP7 !__________________________________________________________________________ !VARIÁVEIS GEOMÉTRICAS !__________________________________________________________________________ C=67.16E-3!COMPRIMENTO DA VIGA (M) L=22E-3 !LARGURA DA VIGA DE ALUMÍNIO (M) H=1E-3 !ESPESSURA DA VIGA DE ALUMÍNIO (M) E=69E9 !MÓDULO DE ELASTICIDADE P=0.33 !POISSON RO=2700 !DENSIDADE !__________________________________________________________________________ !CÁLCULOS !__________________________________________________________________________ AREA=L*H !ÁREA DA SEÇÃO RETA DA VIGA I=L*(H*H*H)/12 !MOMENTO DE INÉRCIA !__________________________________________________________________________ !CRIA A LINHA QUE SERÁ A VIGA !__________________________________________________________________________ K,1,0,0 ! ENTER KEYPOINTS K,2,C,0 L,1,2 ! CREATE LINE !__________________________________________________________________________ !DEFINE O ELEMENTO DE VIGA !__________________________________________________________________________ ET,1,BEAM3 ! ELEMENT TYPE !__________________________________________________________________________ !DEFINE OS PARÂMETROS REAIS (ÁREA, MOMENTO DE INÉRCIA E ESPESSURA) !__________________________________________________________________________ R,1,AREA,I,H ! REAL CONST: AREA,MOMENTO DE INERCIA,ESPESSURA !__________________________________________________________________________ !DEFINE OS PARÂMETROS MECÂNICOS !__________________________________________________________________________ MP,EX,1,E ! YOUNG'S MODULUS MP,PRXY,1,P ! POISSON'S RATIO MP,DENS,1,RO ! DENSITY !__________________________________________________________________________ !DEFINE A MALHA !__________________________________________________________________________ LESIZE,ALL,,,100 ! ELEMENT SIZE LMESH,1 ! MESH LINE !__________________________________________________________________________ !DEFINE OS PARÂMETROS MECÂNICOS !__________________________________________________________________________ FINISH /SOLU ANTYPE,2 ! MODAL ANALYSIS MODOPT,LANB,5 ! SUBSPACE, 5 MODES EQSLV,FRONT ! FRONTAL SOLVER MXPAND,5 ! EXPAND 5 MODES DK,1,ALL ! CONSTRAIN KEYPOINT ONE SOLVE FINISH /POST1 SET,LIST ! LIST SOLUTIONS SET,FIRST PLDISP ! DISPLAY FIRST MODE SHAPE ANMODE,10,0.5, ,0 ! ANIMATE MODE SHAPE

APÊNDICE 2
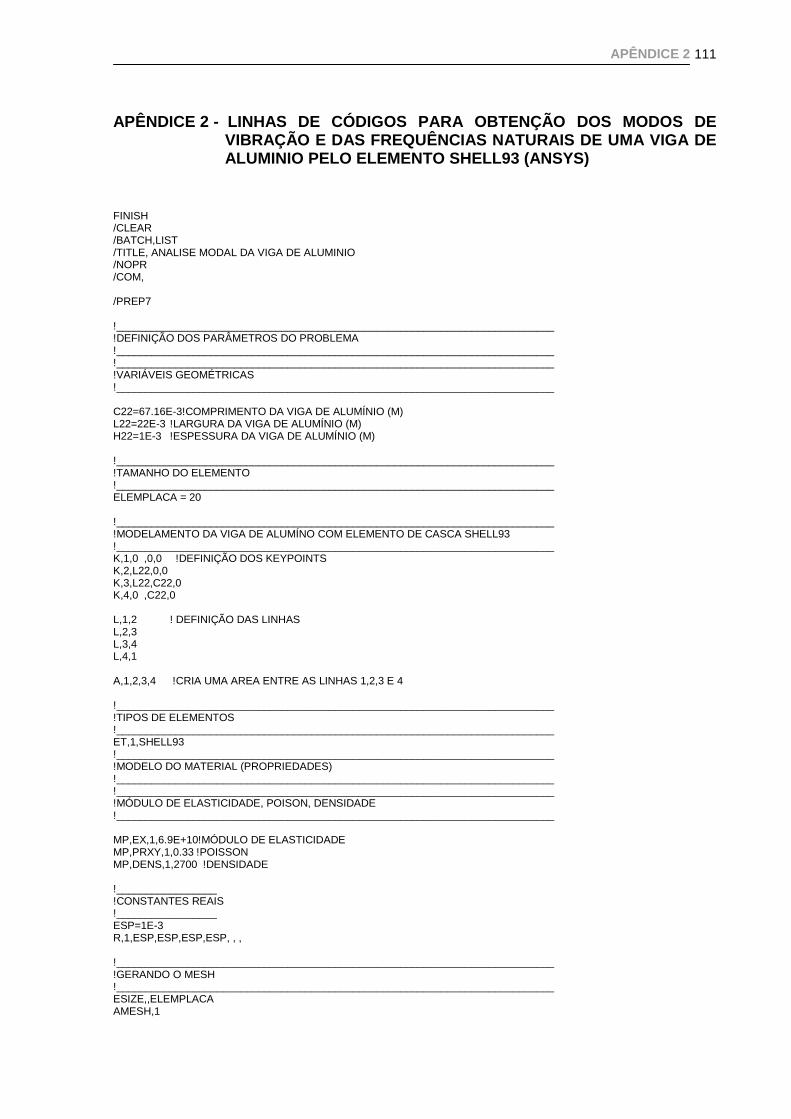
APÊNDICE 2
111
APÊNDICE 2 - LINHAS DE CÓDIGOS PARA OBTENÇÃO DOS MODOS DE VIBRAÇÃO E DAS FREQUÊNCIAS NATURAIS DE UMA VIGA DE ALUMINIO PELO ELEMENTO SHELL93 (ANSYS)
FINISH /CLEAR /BATCH,LIST /TITLE, ANALISE MODAL DA VIGA DE ALUMINIO /NOPR /COM, /PREP7 !__________________________________________________________________________ !DEFINIÇÃO DOS PARÂMETROS DO PROBLEMA !__________________________________________________________________________ !__________________________________________________________________________ !VARIÁVEIS GEOMÉTRICAS !__________________________________________________________________________ C22=67.16E-3!COMPRIMENTO DA VIGA DE ALUMÍNIO (M) L22=22E-3 !LARGURA DA VIGA DE ALUMÍNIO (M) H22=1E-3 !ESPESSURA DA VIGA DE ALUMÍNIO (M) !__________________________________________________________________________ !TAMANHO DO ELEMENTO !__________________________________________________________________________ ELEMPLACA = 20 !__________________________________________________________________________ !MODELAMENTO DA VIGA DE ALUMÍNO COM ELEMENTO DE CASCA SHELL93 !__________________________________________________________________________ K,1,0 ,0,0 !DEFINIÇÃO DOS KEYPOINTS K,2,L22,0,0 K,3,L22,C22,0 K,4,0 ,C22,0 L,1,2 ! DEFINIÇÃO DAS LINHAS L,2,3 L,3,4 L,4,1 A,1,2,3,4 !CRIA UMA AREA ENTRE AS LINHAS 1,2,3 E 4 !__________________________________________________________________________ !TIPOS DE ELEMENTOS !__________________________________________________________________________ ET,1,SHELL93 !__________________________________________________________________________ !MODELO DO MATERIAL (PROPRIEDADES) !__________________________________________________________________________ !__________________________________________________________________________ !MÓDULO DE ELASTICIDADE, POISON, DENSIDADE !__________________________________________________________________________ MP,EX,1,6.9E+10!MÓDULO DE ELASTICIDADE MP,PRXY,1,0.33 !POISSON MP,DENS,1,2700 !DENSIDADE !_________________ !CONSTANTES REAIS !_________________ ESP=1E-3 R,1,ESP,ESP,ESP,ESP, , , !__________________________________________________________________________ !GERANDO O MESH !__________________________________________________________________________ ESIZE,,ELEMPLACA AMESH,1

APÊNDICE 2
112
!__________________________________________________________________________ !GERANDO O MESH !__________________________________________________________________________ VSEL,S,VOLU,,1 VMESH,1 !CRIA A MALHA FINI !__________________________________________________________________________ !SOLUÇÃO !__________________________________________________________________________ /SOLU ANTYPE,2 ! MODAL ANALYSIS MODOPT,LANB,5 ! SUBSPACE, 5 MODES EQSLV,FRONT ! FRONTAL SOLVER MXPAND,5 ! EXPAND 5 MODES !_________________________________________ !ENGASTANDO A VIGA DE ALUMÍNIO !_________________________________________ DL,1,,UX,0 $ DL,1,,UY,0 $ DL,1,,UZ,0 $ DL,1,,ROTX,0 $ DL,1,,ROTY,0 $ DL,1,,ROTZ,0 SOLVE !EXECUTA FINISH FINI !__________________________________________________________________________ !RESULADOS !__________________________________________________________________________ /POST1 SET,LIST !LISTA AS FREQUÊNCIAS NATURAIS

APÊNDICE 3
APÊNDICE 3
114
APÊNDICE 3 - LINHAS DE CÓDIGOS PARA OBTENÇÃO DOS MODOS DE VIBRAÇÃO E DAS FREQUÊNCIAS NATURAIS DE UMA VIGA DE ALUMINIO COM O PZT FIXADO(ANSYS)
FINISH /CLEAR /BATCH,LIST /TITLE, ANALISE MODAL DA VIGA DE ALUMINIO COM O PZT ACOPLADO /NOPR /COM, /PREP7 !__________________________________________________________________________ !DEFINIÇÃO DOS PARÂMETROS DO PROBLEMA !__________________________________________________________________________ !__________________________________________________________________________ !VARIÁVEIS GEOMÉTRICAS !__________________________________________________________________________ C=38.66E-3!COMPRIMENTO DA PLACA PZT (M) L=21.89E-3 !LARGURA DA PLACA PZT (M) H=0.26E-3 ! ESPESSURA DA PLACA PZT (M) C22=67.16E-3!COMPRIMENTO DA VIGA DE ALUMÍNIO (M) L22=22E-3 !LARGURA DA VIGA DE ALUMÍNIO (M) H22=1E-3 !ESPESSURA DA VIGA DE ALUMÍNIO (M) !__________________________________________________________________________ !VARIAVEIS DAS PROPRIEDADES DO MATERIAL PIEZOELÉTRICO !__________________________________________________________________________ E1=5.9E10 ! YOUNG'S MODULUS, N/M^2 NU12=0.34 ! POISSON'S RATIO G12=5.1E10! SHEAR MODULUS, N/M^2 D31=185.00E-12! PIEZOELECTRIC STRAIN COEFFICIENTS, C/N D32=185.00E-12 D33=-435E-12 EPT33=1.2 ! RELATIVE PERMITTIVITY AT CONSTANT STRESS !__________________________________________________________________________ !TAMANHO DO ELEMENTO !__________________________________________________________________________ ELEMPLACA = 13 ELEMPZT = 20*H !__________________________________________________________________________ !SISTEMA DE COORDENADAS !__________________________________________________________________________ LOCAL,11 !SISTEMA DE COORD. POLAR DO EIXO +Y LOCAL,12,,,,,180!SISTEMA DE COORD. POLAR DO EIXO -Y CSYS,11 !ATIVA O SISTEMA DE COORDENADA +Y !__________________________________________________________________________ !MODELAMENTO DA VIGA DE ALUMÍNO COM ELEMENTO DE CASCA SHELL93 !__________________________________________________________________________ K,1,0 ,0,0 K,2,L22,0,0 K,3,L22,C22,0 K,4,0 ,C22,0 K,5,0,H,0 K,6,L,H,0 K,7,L,C,0 K,8,0,C,0 L,1,2 L,2,3 L,3,4 L,4,1 L,5,6 L,6,7 L,7,8 L,8,5 A,1,2,3,4 A,5,6,7,8 ASBA,1,2 !CRIA-SE DUAS ÁREAS DIFERENTES PARA SEREM MESHADAS ! INDIVIDUALMENTE DE MODO A SE OBTER A MALHA CORRETA A,5,6,7,8 ! PARA A PLACA PIEZOELÉTRICA !__________________________________________________________________________ !PLOTA 3D

APÊNDICE 3
115
!__________________________________________________________________________ /VIEW,,1.5,1.5,-1.5 /ANG,1 /REP,FAST !__________________________________________________________________________ !TIPOS DE ELEMENTOS !__________________________________________________________________________ ET,1,SHELL93 !__________________________________________________________________________ !MODELO DO MATERIAL (PROPRIEDADES) !__________________________________________________________________________ !__________________________________________________________________________ !MÓDULO DE ELASTICIDADE, POISON, DENSIDADE !__________________________________________________________________________ MP,EX, 1,6.9E+10 MP,PRXY,1,0.33 MP,DENS,1,2700 !_________________ !CONSTANTES REAIS !_________________ ESP=1E-3 R,1,ESP,ESP,ESP,ESP, , , !__________________________________________________________________________ !GERANDO O MESH !__________________________________________________________________________ ESIZE,,ELEMPLACA AMESH,1 AMESH,3 !__________________________________________________________________________ !MODELAMENTO DA PLACA PZT COM ELEMENTO SÓLIDO SOLID233 !__________________________________________________________________________ K,9,0,H,H K,10,L,H,H K,11,L,C,H K,12,0,C,H V,5,6,7,8,9,10,11,12 !__________________________________________________________________________ !TIPOS DE ELEMENTOS !__________________________________________________________________________ ET,2,SOLID226,1001,,0!ELEMENTO PIEZOELÉTRICO 3D !__________________________________________________________________________ !ELEMENTO PZT !__________________________________________________________________________ TB,ANEL,2,,,1 ! ELASTIC COMPLIANCE MATRIX TBDA,1,1/E1,-NU12/E1,-NU12/E1,0,0,0 TBDA,7,1/E1,-NU12/E1,0,0,0 TBDA,12,1/E1,0,0,0 TBDA,16,1/G12,0,0 TBDA,19,1/G12,0 TBDA,21,1/G12 TB,PIEZ,2,,,1! PIEZOELECTRIC STRAIN MATRIX TBDA,3,D31 TBDA,6,D32 TBDA,9,D33 TB,DPER,2,,,1! PERMITTIVITY AT CONSTANT STRESS TBDATA,1,EPT33,EPT33,EPT33 !__________________________________________________________________________ !GERANDO O MESH !__________________________________________________________________________ ESIZE,ELEMPZT!ESPECIFICA O TAMANHO DO ELEMENTO PARA O PZT VSEL,S,VOLU,,1 VATT,2,2,2 TYPE,2 !DEFINE O TIPO DE ELEMENTO ESYS,11 !SELECIONA O SISTEMA DE COORDENADAS VMESH,1 !CRIA A MALHA FINI !__________________________________________________________________________ !SOLUÇÃO !__________________________________________________________________________ /SOLU ANTYPE,MODAL!SELECIONA ANÁLISE MODAL MODOPT,LANB,5!SELECIONA O MODO LANB E 5 MODOS !_________________________________________

APÊNDICE 3
116
!ENGASTANDO A VIGA DE ALUMÍNIO !_________________________________________ DL,1,,UX,0 $ DL,1,,UY,0 $ DL,1,,UZ,0 $ DL,1,,ROTX,0 $ DL,1,,ROTY,0 $ DL,1,,ROTZ,0 SOLVE !EXECUTA FINI !__________________________________________________________________________ !RESULADOS !__________________________________________________________________________ /POST1 SET,LIST !LISTA AS FREQUÊNCIAS NATURAIS

APÊNDICE 4

APÊNDICE 4
118
APÊNDICE 4 - LINHAS DE CÓDIGO PARA ANÁLISE HARMÔNICA PARA A VIGA SEM O PZT (ANSYS)
FINISH /CLEAR /BATCH,LIST /TITLE, ANALISE HARMONICA DA VIGA DE ALUMINIO /NOPR /COM, /PREP7 !_____________________________________________________________________ !DEFINIÇÃO DOS PARÂMETROS DO PROBLEMA !_____________________________________________________________________ !VARIÁVEIS GEOMÉTRICAS !_____________________________________________________________________ C22=67.16E-3!COMPRIMENTO DA VIGA DE ALUMÍNIO (M) L22=22E-3!LARGURA DA VIGA DE ALUMÍNIO (M) H22=1E-3!ESPESSURA DA VIGA DE ALUMÍNIO (M) !_____________________________________________________________________ !TAMANHO DO ELEMENTO !_____________________________________________________________________ ELEMPLACA = 30 !_____________________________________________________________________ !MODELAMENTO DA VIGA DE ALUMÍNO COM ELEMENTO DE CASCA SHELL93 !_____________________________________________________________________ K,1,0 ,0,0 !DEFINIÇÃO DOS KEYPOINTS K,2,L22,0,0 K,3,L22,C22,0 K,4,0 ,C22,0 L,1,2 ! DEFINIÇÃO DAS LINHAS L,2,3 L,3,4 L,4,1 A,1,2,3,4 !CRIA UMA AREA ENTRE AS LINHAS 1,2,3 E 4 !_____________________________________________________________________ !TIPOS DE ELEMENTOS !_____________________________________________________________________ ET,1,SHELL93 !_____________________________________________________________________ !MODELO DO MATERIAL (PROPRIEDADES) !_____________________________________________________________________ !MÓDULO DE ELASTICIDADE, POISON, DENSIDADE !_____________________________________________________________________ MP,EX,1,6.9E+10!MÓDULO DE ELASTICIDADE MP,PRXY,1,0.33 !POISSON MP,DENS,1,2700 !DENSIDADE !_________________ !CONSTANTES REAIS !_________________ ESP=1E-3 R,1,ESP,ESP,ESP,ESP, , , !_____________________________________________________________________ !GERANDO O MESH !_____________________________________________________________________ ESIZE,,ELEMPLACA AMESH,1 !_____________________________________________________________________ !GERANDO O MESH !_____________________________________________________________________ VSEL,S,VOLU,,1 VMESH,1!CRIA A MALHA !_______________________________________________________________ !ENGASTANDO A VIGA DE ALUMÍNIO !_________________________________________ DL,1,,UX,0 $ DL,1,,UY,0 $ DL,1,,UZ,0 $ DL,1,,ROTX,0 $ DL,1,,ROTY,0 $ DL,1,,ROTZ,0 !_____________________________________________________________________ !SOLUÇÃO !_____________________________________________________________________ /SOLU ANTYPE,HARMONIC !SELECIONA ANÁLISE HARMÔNICA
APÊNDICE 4
119
F,152,FZ,2.71, !APLICA UMA FORÇA DE 2,71N NO NÓ 152 HARFRQ,19,120!DEFINE A FAIXA DE FREQUÊNCIA NSUBST,101 !DEFINE O NÚMERO DE PONTOS PARA CADA MODO KBC,1!DEFIINE O PASSO DADO DENTRO DE UMA ETAPA DE CARGA NO NÓ SOLVE !EXECUTA FINI
APÊNDICE 5

APÊNDICE 5
121
APÊNDICE 5 - LINHAS DE CÓDIGO PARA ANÁLISE HARMÔNICA PARA A VIGA COM O PZT (ANSYS)
FINISH /CLEAR /batch,list /title, Analise Harmônica da viga de aluminio com PZT acoplado /nopr /com, /PREP7 !_____________________________________________________________________ !DEFINIÇÃO DOS PARÂMETROS DO PROBLEMA !_____________________________________________________________________ !Variáveis geométricas !_____________________________________________________________________ C=38.66e-3 !comprimento da placa pzt (m) L=21.89e-3 !largura da placa pzt (m) H=0.26e-3 C22=67.16e-3 !comprimento da viga de alumínio (m) L22=22e-3!largura da viga de alumínio (m) H22=1e-3!espessura da viga de alumínio (m) !_____________________________________________________________________ !Variaveis das propriedades do material piezoelétrico !_____________________________________________________________________ E1=5.9e10 ! Young's modulus, N/m^2 NU12=0.34 ! Poisson's ratio G12=5.1e10! Shear modulus, N/m^2 d31=185.00e-12! Piezoelectric strain coefficients, C/N d32=185.0e-12 d33=-435e-12 ept33=1.2 ! Relative permittivity at constant stress !_____________________________________________________________________ !Tamanho do elemento !_____________________________________________________________________ Elemplaca = 13 Elempzt = 20*H !_____________________________________________________________________ !Sistema de coordenadas !_____________________________________________________________________ local,11!sistema de coord. polar do eixo +Y local,12,,,,,180!sistema de coord. polar do eixo -Y csys,11!ativa o sistema de coordenada +Y !_____________________________________________________________________ !MODELAMENTO DA VIGA DE ALUMÍNO COM ELEMENTO DE CASCA SHELL93 !_____________________________________________________________________ k,1,0 ,0,0 k,2,L22,0,0 k,3,L22,C22,0 k,4,0 ,C22,0 k,5,0,H,0 k,6,L,H,0 k,7,L,C,0 k,8,0,C,0 L,1,2 L,2,3 L,3,4 L,4,1 L,5,6 L,6,7 L,7,8 L,8,5 A,1,2,3,4 A,5,6,7,8 asba,1,2!cria-se duas áreas diferentes para serem meshadas ! individualmente de modo a se obter a malha correta A,5,6,7,8! para a placa piezoelétrica !_____________________________________________________________________ !PLOTA 3D !_____________________________________________________________________ /VIEW,,1.5,1.5,-1.5 /ANG,1 /REP,FAST

APÊNDICE 5
122
!_____________________________________________________________________ !TIPOS DE ELEMENTOS !_____________________________________________________________________ et,1,SHELL93 !_____________________________________________________________________ !MODELO DO MATERIAL (PROPRIEDADES) !_____________________________________________________________________ !_____________________________________________________________________ !Módulo de elasticidade, Poison, Densidade !_____________________________________________________________________ mp,EX, 1,6.9e+10 mp,PRXY,1,0.33 mp,DENS,1,2700 !_________________ !Constantes Reais !_________________ esp=1e-3 R,1,esp,esp,esp,esp, , , !______ ______________________________________________________________ !GERANDO O MESH !_ ____________________________________________________________________ esize,,Elemplaca amesh,1 amesh,3 !_____________________________________________________________________ !MODELAMENTO DA PLACA PZT COM ELEMENTO SÓLIDO SOLID233 !_____________________________________________________________________ k,9,0,H,H k,10,L,H,H k,11,L,C,H k,12,0,C,H v,5,6,7,8,9,10,11,12 !_____ _____________________________________________________________ !TIPOS DE ELEMENTOS !_____ ___________________________________________________________ et,2,SOLID226,1001,,0!Elemento piezoelétrico 3D !______ _______________________________________________________________ !Elemento pzt !_____________________________________________________________________ tb,ANEL,2,,,1 ! Elastic compliance matrix tbda,1,1/E1,-NU12/E1,-NU12/E1,0,0,0 tbda,7,1/E1,-NU12/E1,0,0,0 tbda,12,1/E1,0,0,0 tbda,16,1/G12,0,0 tbda,19,1/G12,0 tbda,21,1/G12 tb,PIEZ,2,,,1! Piezoelectric strain matrix tbda,3,d31 tbda,6,d32 tbda,9,d33 tb,DPER,2,,,1! Permittivity at constant stress tbdata,1,ept33,ept33,ept33 !_____________________________________________________________________ !GERANDO O MESH !_____________________________________________________________________ esize,Elempzt!especifica o tamanho do elemento para o pzt vsel,s,volu,,1 vatt,2,2,2 type,2!define o tipo de elemento esys,11!seleciona o sistema de coordenadas vmesh,1!cria a malha fini !_____________________________________________________________________ !APLICANDO CARREGAMENTOS NO PZT !_____________________________________________________________________ /PREP7 nsel,s,loc,z,0 !seleciona a face inferior do pzt d,all,volt,0 !aplica o terra nessa camada nsel,s,loc,z,H !seleciona a camada superior do pzt em cp,1,volt,all!interliga os nós com o nó de menor valor *get,teste,node,1704,loc,z!armazena o número do nó de menor valor m,1704,uz, , ,!define como nó mestre de graus de liberdade nsel,all

APÊNDICE 5
123
fini !_______________________________________________________________ !Engastando a VIGA de alumínio !_________________________________________ /SOLU dl,1,,ux,0 $ dl,1,,uy,0 $ dl,1,,uz,0 $ dl,1,,rotx,0 $ dl,1,,roty,0 $ dl,1,,rotz,0 /SOLU ANTYPE,HARMONIC !SELECIONA ANÁLISE HARMÔNICA F,627,FZ,2.71, !APLICA UMA FORÇA DE 2,71N NO NÓ 627 HARFRQ,19,120!DEFINE A FAIXA DE FREQUÊNCIA NSUBST,101 !DEFINE O NÚMERO DE PONTOS PARA CADA MODO KBC,1!DEFIINE O PASSO DADO DENTRO DE UMA ETAPA DE CARGA NO NÓ SOLVE !EXECUTA FINI

APÊNDICE 6 124
APÊNDICE 6

APÊNDICE 6 125
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-15
-10
-5
0
5
10
15
Tensão E
létr
ica(V
)
Tempo(s)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-1.5
-1
-0.5
0
0.5
1
1.5x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
APÊNDICE 6 – RESULTADOS EXPERIMENTAIS PARA AS DEMAIS FREQUÊNCIAS
20 Hz
25 Hz
30 Hz

APÊNDICE 6 126
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
35 Hz
40 Hz
45 Hz

APÊNDICE 6 127
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20T
ensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
50 Hz
55 Hz
60 Hz

APÊNDICE 6 128
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20T
ensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
65 Hz
70 Hz
80 Hz

APÊNDICE 6 129
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-20
-10
0
10
20
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-15
-10
-5
0
5
10
15
Tensão E
létr
ica(V
)
Tempo(s)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-1.5
-1
-0.5
0
0.5
1
1.5x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
85 Hz
90 Hz
95 Hz

APÊNDICE 6 130
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-15
-10
-5
0
5
10
15
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-1.5
-1
-0.5
0
0.5
1
1.5x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-15
-10
-5
0
5
10
15
Tensão E
létr
ica(V
)
Tempo(s)
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03-1.5
-1
-0.5
0
0.5
1
1.5x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-20
-17
-14
-11
-8
-5
-2
1
4
7
10
13
16
19
Tensão E
létr
ica(V
)
Tempo(s)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-2
-1
0
1
2x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
100 Hz
105 Hz
110 Hz

APÊNDICE 6 131
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-10
-5
0
5
10
Tensão E
létr
ica(V
)
Tempo(s)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-1
-0.5
0
0.5
1x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-10
-5
0
5
10T
ensão E
létr
ica(V
)
Tempo(s)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015-1
-0.5
0
0.5
1x 10
-4
De
form
ação (
m/m
)
Tensão em aberto(V)
Tensão na Carga Resistiva(V)
Deformação (m\m)
115 Hz
120 Hz

APÊNDICE 7
APÊNDICE 7
133
APÊNDICE 7 – ANÁLISE TRANSIENTE APÓS AJUSTE
FINISH /CLEAR /BATCH,LIST /TITLE, ANALISE TRANSIENTE DA VIGA DE ALUMINIO COM PZT ACOPLADO /NOPR /COM, /PREP7 !_____________________________________________________________________ !DEFINIÇÃO DOS PARÂMETROS DO PROBLEMA !_____________________________________________________________________ !VARIÁVEIS GEOMÉTRICAS !_____________________________________________________________________ C=38.66E-3!COMPRIMENTO DA PLACA PZT (M) L=21.89E-3 !LARGURA DA PLACA PZT (M) H=0.26E-3 C22=67.16E-3!COMPRIMENTO DA VIGA DE ALUMÍNIO (M) L22=22E-3 !LARGURA DA VIGA DE ALUMÍNIO (M) H22=1E-3 !ESPESSURA DA VIGA DE ALUMÍNIO (M) !_____________________________________________________________________ !VARIAVEIS DAS PROPRIEDADES DO MATERIAL PIEZOELÉTRICO !_____________________________________________________________________ E1=5.9E10 ! YOUNG'S MODULUS, N/M^2 NU12=0.35 ! POISSON'S RATIO G12=5.1E10! SHEAR MODULUS, N/M^2 D31=185E-12! PIEZOELECTRIC STRAIN COEFFICIENTS, C/N D32=185E-12 D33=-400E-12 EPT33=1.2 ! RELATIVE PERMITTIVITY AT CONSTANT STRESS !_____________________________________________________________________ !TAMANHO DO ELEMENTO !_____________________________________________________________________ ELEMPLACA = 13 ELEMPZT = 20*H !_____________________________________________________________________ !SISTEMA DE COORDENADAS !_____________________________________________________________________ LOCAL,11 !SISTEMA DE COORD. POLAR DO EIXO +Y LOCAL,12,,,,,180!SISTEMA DE COORD. POLAR DO EIXO -Y CSYS,11 !ATIVA O SISTEMA DE COORDENADA +Y !_____________________________________________________________________ !MODELAMENTO DA VIGA DE ALUMÍNO COM ELEMENTO DE CASCA SHELL93 !_____________________________________________________________________ K,1,0 ,0,0 K,2,L22,0,0 K,3,L22,C22,0 K,4,0 ,C22,0 K,5,0,H,0 K,6,L,H,0 K,7,L,C,0 K,8,0,C,0 L,1,2 L,2,3 L,3,4 L,4,1 L,5,6 L,6,7 L,7,8 L,8,5 A,1,2,3,4 A,5,6,7,8 ASBA,1,2 !CRIA-SE DUAS ÁREAS DIFERENTES PARA SEREM MESHADAS ! INDIVIDUALMENTE DE MODO A SE OBTER A MALHA CORRETA A,5,6,7,8 ! PARA A PLACA PIEZOELÉTRICA !_____________________________________________________________________ !PLOTA 3D !_____________________________________________________________________ /VIEW,,1.5,1.5,-1.5 /ANG,1 /REP,FAST !_____________________________________________________________________

APÊNDICE 7
134
!TIPOS DE ELEMENTOS !_____________________________________________________________________ ET,1,SHELL93 !_____________________________________________________________________ !MODELO DO MATERIAL (PROPRIEDADES) !_____________________________________________________________________ !_____________________________________________________________________ !MÓDULO DE ELASTICIDADE, POISON, DENSIDADE !_____________________________________________________________________ MP,EX, 1,6.9E+10 MP,PRXY,1,0.33 MP,DENS,1,2700 !_________________ !CONSTANTES REAIS !_________________ ESP=1E-3 R,1,ESP,ESP,ESP,ESP, , , !______ ______________________________________________________________ !GERANDO O MESH !_ ____________________________________________________________________ ESIZE,,ELEMPLACA AMESH,1 AMESH,3 !_____________________________________________________________________ !MODELAMENTO DA PLACA PZT COM ELEMENTO SÓLIDO SOLID233 !_____________________________________________________________________ K,9,0,H,H K,10,L,H,H K,11,L,C,H K,12,0,C,H V,5,6,7,8,9,10,11,12 !_____ _____________________________________________________________ !TIPOS DE ELEMENTOS !_____ ___________________________________________________________ ET,2,SOLID226,1001,,0 !ELEMENTO PIEZOELÉTRICO 3D !______ _______________________________________________________________ !ELEMENTO PZT !_____________________________________________________________________ TB,ANEL,2,,,1 ! ELASTIC COMPLIANCE MATRIX TBDA,1,1/E1,-NU12/E1,-NU12/E1,0,0,0 TBDA,7,1/E1,-NU12/E1,0,0,0 TBDA,12,1/E1,0,0,0 TBDA,16,1/G12,0,0 TBDA,19,1/G12,0 TBDA,21,1/G12 TB,PIEZ,2,,,1 ! PIEZOELECTRIC STRAIN MATRIX TBDA,3,D31 TBDA,6,D32 TBDA,9,D33 TB,DPER,2,,,1 ! PERMITTIVITY AT CONSTANT STRESS TBDATA,1,EPT33,EPT33,EPT33 !_____________________________________________________________________ !GERANDO O MESH !_____________________________________________________________________ ESIZE,ELEMPZT!ESPECIFICA O TAMANHO DO ELEMENTO PARA O PZT VSEL,S,VOLU,,1 VATT,2,2,2 TYPE,2 !DEFINE O TIPO DE ELEMENTO ESYS,11 !SELECIONA O SISTEMA DE COORDENADAS VMESH,1 !CRIA A MALHA FINI !_____________________________________________________________________ !APLICANDO CARREGAMENTOS NO PZT !_____________________________________________________________________ /PREP7 NSEL,S,LOC,Z,0!SELECIONA A FACE INFERIOR DO PZT D,ALL,VOLT,0!APLICA O TERRA NESSA CAMADA NSEL,S,LOC,Z,H!SELECIONA A CAMADA SUPERIOR DO PZT EM CP,1,VOLT,ALL!INTERLIGA OS NÓS COM O NÓ DE MENOR VALOR *GET,TESTE,NODE,1704,LOC,Z!ARMAZENA O NÚMERO DO NÓ DE MENOR VALOR M,1704,UZ, , ,!DEFINE COMO NÓ MESTRE DE GRAUS DE LIBERDADE NSEL,ALL

APÊNDICE 7
135
FINI !__________________________________________________________________________ !PRESSÃO E FREQUÊNCIA APLICADA A VIGA !__________________________________________________________________________ AMP2=2.71 !AMPLITUDE DE PRESSÃO F=75 !FREQUÊNCIA DEFINIDA PARA ANÁLISE !_______________________________________________________________ !ENGASTANDO A BORDA DA PLACA DE ALUMÍNIO !_________________________________________ /SOLU DL,1,,UX,0 $ DL,1,,UY,0 $ DL,1,,UZ,0 $ DL,1,,ROTX,0 $ DL,1,,ROTY,0 $ DL,1,,ROTZ,0 !__________________________________________________________________________ !SOLUÇÃO !__________________________________________________________________________ /SOLU ANTYPE,TRANS!SELECIONA ANÁLISE TRANSIENTE TRNOPT,FULL,!DEFINE MÉTODO DA SUPERPOSIÇÃO DE MODOS DELTIM,0.0001!ESPECIFICA O TEMPO DE "AMOSTRAGEM" BETAD,0.0007 TAMVETOR = 350 !NÚMERO DE PONTOS *DIM,T,ARRAY,TAMVETOR!CRIA UM VETOR DE TEMPO *DIM,PRESSAO,ARRAY,TAMVETOR!CRIA UM VETOR DE PRESSÃO TEMPO = 0 !TEMPO INICIAL *DO,I,1,TAMVETOR T(I) = TEMPO PRESSAO(I)=AMP2*SIN(2*3.1416*F*T(I)) !PRESSÃO SENOIDAL TEMPO=0.0001*I!INCREMENTO DO TEMPO F,627,FZ,PRESSAO(I), ! APLICA NO NÓ 627 O VALOR DE PRESSÃO TIME,TEMPO !TEMPO EM QUE A CARGA É APLICADA KBC,1 !MODO RAMPA LSWRITE,I *ENDDO LSSOLVE,1,TAMVETOR,1!LÊ E RESOLVE MÚLTIPLAS ETAPAS DE CARGA FINI

ANEXO 1

ANEXO 1
137
ANEXO 1 – PROCESSO DE COLAGEM DO PZT NA VIGA DE ALUMÍNIO
Segundo Souto, 2008 o procedimento correto para fixação do PZT em uma estrutura de
alumínio é:
1. O local onde o PZT será fixado na viga deverá ser limpo e lixado com palha de aço fina;
2. Aplicar um solvente (pode ser acetona) para eliminar a gordura e retirar a sujeira deixada pelo
processo anterior;
3. A superfície do PZT que ficar em contato com o alumínio deverá ser lixada levemente com
palha de aço fina (tomar cuidado para não retirar a camada de metal da superfície do PZT);
4. Aplicar um solvente (acetona) para remover a sujeira e a gordura;
5. Com o PZT e a viga de alumínio limpas e secas, aplicar uma camada fina de adesivo KBR-
610 nas duas superfícies com um pincel macio;
6. Unir as duas peças com o adesivo e colocar sobre a superfície superior do PZT uma fita
adesiva transparente para sustentar o PZT na posição;
7. Sobre a fita adesiva colocar uma almofada de borracha com uma massa que mantenha uma
pressão uniformemente distribuída de 3 a 5Kgf/cm2 sobre a região do PZT;
8. Submeter a colagem a um processo térmico como mostra a Figura A1.
FIGURA A1 - CURVA TÉRMICA NO PROCESSO DE CURA DO ADESIVO KBR-610

ANEXO 2

ANEXO 2
139
ANEXO 2 – PROCEDIMENTOS PARA FIXAÇÃO DOS EXTENSÔMETROS
Os procedimentos utilizados para fixação dos extensômetros são:
1. O local onde o PZT será fixado na viga deverá ser limpo e lixado com palha de aço fina;
2. Aplicar um solvente (pode ser acetona) para eliminar a gordura e retirar a sujeira deixada pelo
processo anterior;
3. Aplicar um solvente (acetona) para remover a sujeira e a gordura;
4. Traçar as linhas de referência para orientação dos sensores;
5. Posicionamento do sensor (o manuseio pode ser feito com fita adesiva ) sobre as linhas de
referência;
6. Com os extensômetros e a viga de alumínio limpos e secos, aplicar uma camada fina de
adesivo KBR-610 nas superfícies a serem unidas com um pincel macio;
7. Sobre a fita adesiva colocar uma almofada de borracha com uma massa que mantenha uma
pressão uniformemente distribuída, durante 24 horas;
8. Após o processo de colagem é necessário proteger o local onde o sensor colado para evitar
choques e inutilização.

ANEXO 3
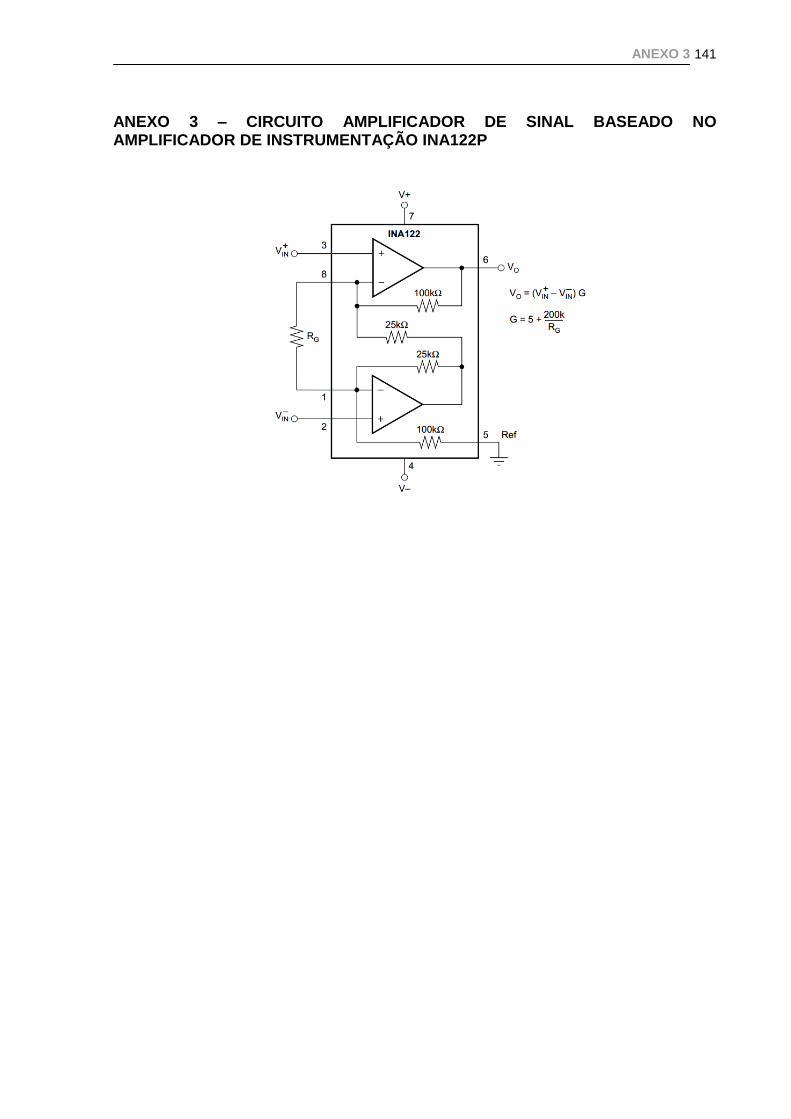
ANEXO 3
141
ANEXO 3 – CIRCUITO AMPLIFICADOR DE SINAL BASEADO NO AMPLIFICADOR DE INSTRUMENTAÇÃO INA122P
