animal monitoring with unmanned aerial vehicle-aided
TRANSCRIPT
Animal Monitoring with Unmanned AerialVehicle-Aided Wireless Sensor Networks
Jun Xu, Gurkan Solmaz, Rouhollah Rahmatizadeh, Damla Turgut andLadislau Boloni
Department of Electrical Engineering and Computer ScienceUniversity of Central Florida - Orlando, FL
October 24, 2015
Jun Xu (UCF) LCN 2015 October 24, 2015 1 / 21

Outline
1 IntroductionMotivation & problem statement
2 Problem analysisClusteringNetwork modelingValue of information
3 Proposed path planning approachMarkov decision processPath planning process for UAV
4 Simulation studySimulation setup and metricsDemo displayPerformance results
5 Conclusion
Jun Xu (UCF) LCN 2015 October 24, 2015 2 / 21

Outline
1 IntroductionMotivation & problem statement
2 Problem analysisClusteringNetwork modelingValue of information
3 Proposed path planning approachMarkov decision processPath planning process for UAV
4 Simulation studySimulation setup and metricsDemo displayPerformance results
5 Conclusion
Jun Xu (UCF) LCN 2015 October 24, 2015 2 / 21

Outline
1 IntroductionMotivation & problem statement
2 Problem analysisClusteringNetwork modelingValue of information
3 Proposed path planning approachMarkov decision processPath planning process for UAV
4 Simulation studySimulation setup and metricsDemo displayPerformance results
5 Conclusion
Jun Xu (UCF) LCN 2015 October 24, 2015 2 / 21

Outline
1 IntroductionMotivation & problem statement
2 Problem analysisClusteringNetwork modelingValue of information
3 Proposed path planning approachMarkov decision processPath planning process for UAV
4 Simulation studySimulation setup and metricsDemo displayPerformance results
5 Conclusion
Jun Xu (UCF) LCN 2015 October 24, 2015 2 / 21

Outline
1 IntroductionMotivation & problem statement
2 Problem analysisClusteringNetwork modelingValue of information
3 Proposed path planning approachMarkov decision processPath planning process for UAV
4 Simulation studySimulation setup and metricsDemo displayPerformance results
5 Conclusion
Jun Xu (UCF) LCN 2015 October 24, 2015 2 / 21

Motivation
Animal monitoring have various goals:
Tracking their migration paths
Predict if specific endangered species exist
Goal of this application:
Providing reliable animal appearance information in large-scale areas
Do not using mounting devices & not affecting animal activities
Jun Xu (UCF) LCN 2015 October 24, 2015 3 / 21

Problem statement
How to find these animals?
Sensors can not directly send data to remote base station
How the sink (UAV) knows which sensors have the relevant information
How to use those sensed information?
Latency between animal appearance and information being gathered
How to quantify this information
Jun Xu (UCF) LCN 2015 October 24, 2015 4 / 21

Clustering
Real movement trajectories of 4 zebras in 3 days †Wildlife animals are more likely to having activities in a small area
†Yong Wang, Pei Zhang, Ting Liu, Chris Sadler, Margaret Martonosi, CRAWDAD dataset princetonzebranet (v. 02/14/2007),traceset: movement, downloaded from http://crawdad.org/princeton/zebranet/20070214/movement, doi:10.15783/C77C78,Feb 2007.
Jun Xu (UCF) LCN 2015 October 24, 2015 5 / 21

Clustering
Real movement trajectories of 4 zebras in 3 days †Wildlife animals are more likely to having activities in a small area
†Yong Wang, Pei Zhang, Ting Liu, Chris Sadler, Margaret Martonosi, CRAWDAD dataset princetonzebranet (v. 02/14/2007),traceset: movement, downloaded from http://crawdad.org/princeton/zebranet/20070214/movement, doi:10.15783/C77C78,Feb 2007.
Jun Xu (UCF) LCN 2015 October 24, 2015 6 / 21
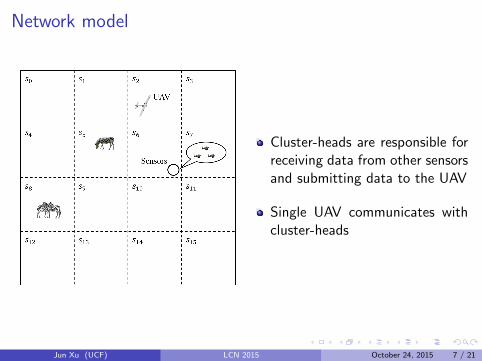
Network model
Cluster-heads are responsible forreceiving data from other sensorsand submitting data to the UAV
Single UAV communicates withcluster-heads
Jun Xu (UCF) LCN 2015 October 24, 2015 7 / 21

Value of information
The value of information (VoI)†
Sensed information has the high-est value when event occurs
Our goal is maximizing the VoIin the whole network
A: the initial value of the informationB: the decay speed of the VoI
†Turgut, Damla, and Ladislau Boloni. ”A pragmatic value-of-information approach for intruder tracking sensor networks.”Communications (ICC), 2012 IEEE International Conference on. IEEE, 2012.
Jun Xu (UCF) LCN 2015 October 24, 2015 8 / 21

Markov decision process model
5-tuple {S ,A,P,R, γ}:S is the set of states (grids) inthe network
A is the set of possible actionsthat UAV can do
P is the state transition probabil-ities
R is the instant reward when theUAV enters one gird
γ ∈ [0, 1) is the discount param-eter
Jun Xu (UCF) LCN 2015 October 24, 2015 9 / 21

Markov decision process model
Solved this MDPmodel by Q-learning
9 possible actions ofS4: 8 neighbors andstaying itself
Q(s, a) = R(s) +γmax
a′Q(s ′, a′)
Instant reward R(s),future potential re-ward Q(s ′, a′)
Possible actions of S4: {Northwest, North, Northeast, West, Stay, East,Southwest, South, Southeast}
Jun Xu (UCF) LCN 2015 October 24, 2015 10 / 21

Path planning flow chart
Exploitation: deter-ministic grid selectionby Q(s, a)value
Exploration: randomgrid selection
ε: random selectionprobability
Jun Xu (UCF) LCN 2015 October 24, 2015 11 / 21

Simulation setup
Movement traces of zebras:I ZebraNet project †I 5 zebras in June 2005 at a 10km × 10km area near Nanyuki, KenyaI 5682 GPS records in totalI GPS sampling time interval: 1 minute
Definition of sensing events:I If zebra switches grid, record the eventI If zebra always stays in one grid, record every ∆t time
†Yong Wang, Pei Zhang, Ting Liu, Chris Sadler, Margaret Martonosi, CRAWDAD dataset princetonzebranet (v. 02/14/2007),traceset: movement, downloaded from http://crawdad.org/princeton/zebranet/20070214/movement, doi:10.15783/C77C78,Feb 2007.
Jun Xu (UCF) LCN 2015 October 24, 2015 12 / 21

Simulation setup
Simulator:I Java-based discrete time simulator
Performance metrics:I Value of informationI Average message delayI Number of zebras encountered
Approaches for comparison:I GreedyI Traveling salesman problemI Random
Jun Xu (UCF) LCN 2015 October 24, 2015 13 / 21

Simulation setup
Network size 10km × 10kmNumber of grids (states) 16Grid size 2500m × 2500mUnit experimental time (round) 10sUAV speed 100m/roundDecay speed of VoI (parameter B) 0.05Radius r for direct observation 200mInitial reward IR (σ, Ci , Idist , Iduration) 10.0 (10.0, 1.0, 1.0, 1.0)
Jun Xu (UCF) LCN 2015 October 24, 2015 14 / 21

Demo display
Jun Xu (UCF) LCN 2015 October 24, 2015 15 / 21

Value of information
0 500 1000 1500 2000 2500 30000
200
400
600
800
1000
1200
1400
Simulation time (min)
Val
ue o
f inf
orm
atio
n
MDPGreedyTSPRandom
MDP (Markov decision process)
Greedy (Greedy total number of pre-vious events)
TSP (Traveling salesman problem)
Random (Random selection from allgrids)
Jun Xu (UCF) LCN 2015 October 24, 2015 16 / 21

Average message delays
MDP Greedy TSP Random0
10
20
30
40
50
60
Ave
rage
del
ay (
min
)
MDP (Markov decision process)
Greedy (Greedy total number of pre-vious events)
TSP (Traveling salesman problem)
Random (Random selection from allgrids)
TSP: 0 deviation because fixed route
Jun Xu (UCF) LCN 2015 October 24, 2015 17 / 21

Number of zebras encountered
MDP Greedy TSP Random0
50
100
150
200
250
Num
ber
of z
ebra
s en
coun
tere
d
MDP (Markov decision process)
Greedy (Greedy total number of pre-vious events)
TSP (Traveling salesman problem)
Random (Random selection from allgrids)
Direct observation radius (r)
Jun Xu (UCF) LCN 2015 October 24, 2015 18 / 21

Performance stability
0 500 1000 1500 2000 2500 30000
500
1000
1500
Simulation time (min)
Val
ue o
f inf
orm
atio
n
MDP−1MDP−2MDP−3MDP−4
Results from 4 time experiments
Same parameters
Jun Xu (UCF) LCN 2015 October 24, 2015 19 / 21

Exploration
0 500 1000 1500 2000 2500 30000
500
1000
1500
Simulation time (min)
Val
ue o
f inf
orm
atio
n
ε = 0.2ε = 0.4ε = 0.6ε = 0.8
ε− Greedy policy
The probability of random grid selec-tion by UAV
Impact of exploration
Jun Xu (UCF) LCN 2015 October 24, 2015 20 / 21

Conclusion
We focused on the animal monitoring in large area
We proposed a MDP-based approach for UAV path planning
The evaluation indicated significant improvement compared to Greedy,TSP and Random
Future work:I Other species, other datasetI Multi-UAVs
Jun Xu (UCF) LCN 2015 October 24, 2015 21 / 21