analisis temporal de seÑales y sistemas - …prof.usb.ve/tperez/docencia/1421/capi/capitulo...
TRANSCRIPT
apuntes señales
ANALISIS TEMPORAL DE SEÑALES Y SISTEMAS
Veremos 2 herramientas fundamentales para el análisis de sistemas discretos y contínuos en el dominio del tiempo:
1) Representación a través de ecuaciones de diferencia finita o de ecuaciones diferenciales.
2) Representación a través de la respuesta impulsiva.
3.1.-REPRESENTACION DE SISTEMAS MEDIANTE ECUACIONES
3.1.1.-Representación de un sistema discreto mediante ecuaciones de diferencia finita.
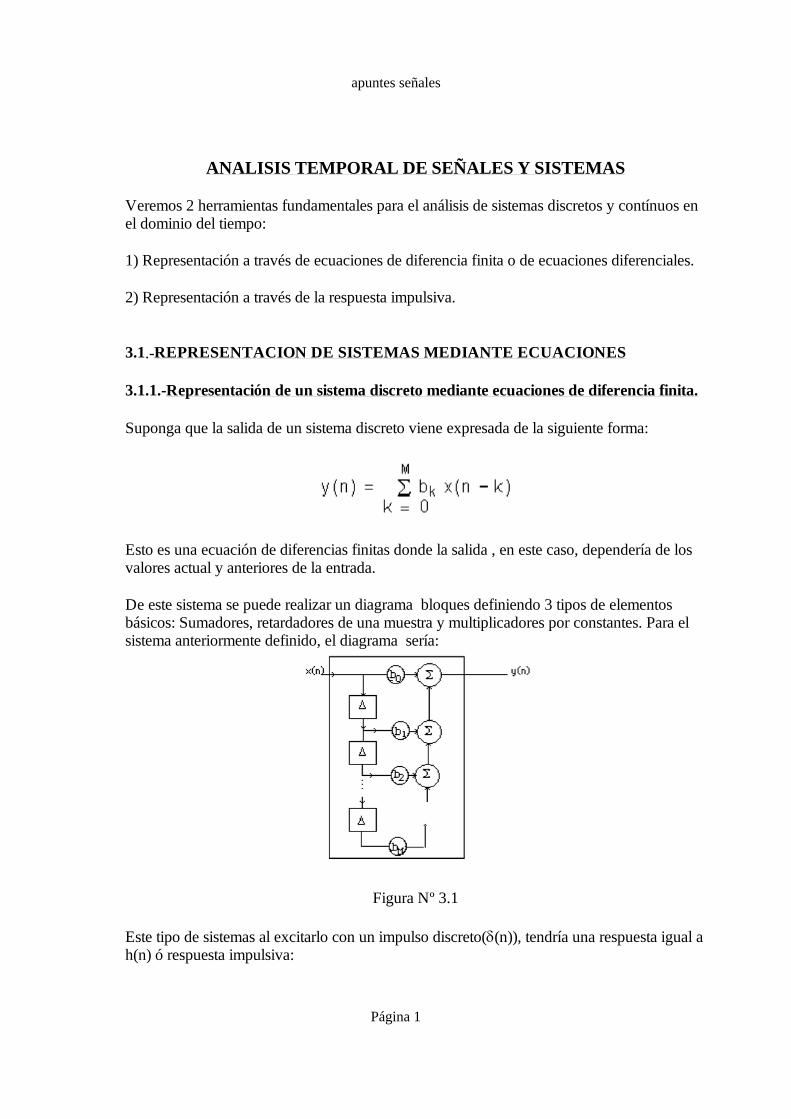
Suponga que la salida de un sistema discreto viene expresada de la siguiente forma:
Esto es una ecuación de diferencias finitas donde la salida , en este caso, dependería de los valores actual y anteriores de la entrada.
De este sistema se puede realizar un diagrama bloques definiendo 3 tipos de elementos básicos: Sumadores, retardadores de una muestra y multiplicadores por constantes. Para el sistema anteriormente definido, el diagrama sería:
Figura Nº 3.1
Este tipo de sistemas al excitarlo con un impulso discreto(δ(n)), tendría una respuesta igual a h(n) ó respuesta impulsiva:
Página 1

apuntes señales
Esto tiene un número finito de muestras. Por esto a estos sistemas se les llama FIR (Finite impulse response).
Existen también sistemas de respuesta impulsiva infinita (IIR), en los cuales la salida en cada instante no solo depende de los valores pasados y presente de la entrada , sino que también depende de los valores pasados de la salida. Así la salida y(n) vendría dada por:
En este caso se tiene una ecuación de tipo recursivo ya que plantea un procedimiento de esta naturaleza para calcular la salida en cualquier instante.
Su diagrama en bloques sería:
Figura Nº 3.2
Por ejemplo para M=0 y N=1 , se tendría la siguiente ecuación:
y(n) + K y(n-1) = Ax(n)
Particularmente, la respuesta impulsiva de este sistema se puede calcular de manera
Página 2

apuntes señalesParticularmente, la respuesta impulsiva de este sistema se puede calcular de manera recursiva suponiendo , por ejemplo, que el sistema estaba en reposo. Así:
y(0) + K y(-1) = A δ(0) = A.
Si y(-1) = 0 y(0) = A
y(1) + K y(0) = 0
y(1) = -KA
Así , recurrentemente se llega a que
Se observa que y(n), que en este caso es la respuesta impulsiva h(n), es de duración infinita.
En general si uno tiene una ecuación en diferencias finitas con coeficientes constantes representando un sistema recursivo, y se quiere determinar la salida y(n) el procedimiento será el siguiente:
1) Se determina la solución a la homogénea llamada yh(n)
2) Se determina la solución a la particular llamada yp(n)
3) La salida será y(n) = yh(n) + yp(n). Las constantes que aparecen en las soluciones generales se consiguen sustituyendo y(n) en la ecuación original, y aplicando condiciones iniciales:
Suponga un sistema LIT definido como:
Resolvemos primero la homogénea. Es decir:
Esto al igual que las ecuaciones diferenciales ordinarias se resuelve de la siguiente forma:
1) Se asume una solución del tipo
2) Se sustituye en la ecuación homogénea quedando, luego de factorizar:
Página 3

apuntes señales
3) La solución no trivial es aquella que cumple
4) Se buscan las raíces
5) Por cada raíz real ri simple se asigna una solución del tipo
6) Por cada raíz real ri de multiplicidad m, se asignan m secuencias del tipo
7) Por cada par de raíces complejas ( a ± jb) , se asignan secuencias del tipo
8)Por cada par de raíces complejas (a ± jb) de multiplicidad m , se asignan secuencias del tipo:
Ejemplo: Determine la solución de la siguiente ecuación:
24y(n) - 26y(n-1) + 9 y(n-2) - y(n-3)=0
La ecuación característica a resolver será:
Las raíces de esta ecuación resultan ser 1/2, 1/3, 1/4. Por lo tanto la solución será:
Ejemplo 2: Resuelva la siguiente ecuación:
y(n) + 1/9 y(n-2) =0
La ecuación característica a resolver será:
Las raíces de esta ecuación resultan ser j/3 y -j/3. (raíces complejas )
Página 4

apuntes señales
Para buscar la solución particular, usaremos el método de los coeficientes indeterminados.
Cuando se tiene una ecuación del tipo
la solución particular es del tipo de x(n) multiplicado por una constante, la cual se calculará al insertar ésta junto con la solución a la homogénea en la ecuación original, y aplicar las condiciones iniciales. Así:
- Si x(n) es del tipo
la solución particular tomada será del tipo
-Si x(n) es del tipo
la solución particular tomada será del tipo
- Si x(n) es del tipo
la solución particular tomada será del tipo
-Si x(n) es del tipo
la solución particular tomada será del tipo
-Si x(n) es del tipo
Página 5

apuntes señales
la solución particular tomada será del tipo
-Si x(n) es del tipo
La solución particular tomada será del tipo
7)Si x(n) es una constante para n mayor que 0 ( Ku(n) ) , la solución particular tomada será del tipo Cu(n).
Si la excitación produce salidas del mismo tipo que la homogénea, se aplican las reglas de raíces múltiples.
Ejemplo:
Del último ejercicio resuelto se vió que:
Se observa que a la excitación le correspondería una solución particular del mismo tipo que la solución a la homogénea. Por lo tanto esto se trata como un caso solución de la homogénea de multiplicidad 2 . Así:
Si uno sustituye esta solución en la ecuación original, se debe cumplir que D=0 y C=0.5. Para calcular A y B bastaría conocer 2 condiciones iniciales.
Página 6

apuntes señalesy
Ejercicio: Encuentre la respuesta impulsiva del sistema descrito por la siguiente ecuación en diferencias finitas:
y(n) - A y(n-1) = B x(n)
Solución:
Siguiendo el procedimiento anteriormente descrito, bastaría encontrar la solución a la homogénea y luego sumarle la particular debida a la señal x(n) = δ(n). Pero una señal como la delta discreta que solo existe en n=0 no aportará nada a la solución total. En definitiva se determina la solución a la homogénea y luego se calculan las constantes necesarias en base a condiciones iniciales que por cierto deben ser todas nulas. Así, para el ejemplo propuesto quedaría:
y(n) - Ay(n-1)=0 Tiene como raíz única r=A. Esto produce una solución del tipo:
Para el orden de esta ecuación basta saber que y(-1)=0. Por lo tanto (de la ecuación original)
y(0) = B δ(0) = B = K. Resultando entonces que K=B
La solución final queda entonces:
Ejemplo 2:
Determine la respuesta impulsiva del sistema descrito por la siguiente ecuación en diferencia finita:
y(n) - A y(n-1) = B x(n) + C x(n-1)
En general cuando se tiene una ecuación donde existen términos de x(n) y sus versiones retardadas ( Ej: x(n-1)), se sigue el procedimiento descrito anteriormente respecto a la búsqueda de la homogénea suponiendo que solo existe dependencia con x(n) . Esto produciría y1(n) .Los términos que se suman a esta solución serían del tipo Gy1(n-k) para cada término de la ecuación original del tipo Gx(n-k).
Para el ejemplo que se está trabajando en este caso, la solución sería
Ejemplo 3 :
Página 7

apuntes señales
Determine la salida del sistema descrito por la siguiente ecuación en diferencia finita y(n) - A y(n-1) = B x(n) + C x(n-1) para x(n)= 2 Sen nπ/2
Solución:
a) Se resuelve la homogénea
y(n) - Ay(n-1)=0 Tiene como raíz única r=A. Esto produce una solución del tipo:
b) Se resuelve la particular para x(n) =2Sen nπ/2
c) La salida definitiva será:
y(n) = yh(n) + yp(n) + (C/B) yp(n-1)
Las constantes se obtienen de las condiciones iniciales y de la condición particular de la excitación.
Ejemplo 4 : Determine la respuesta en frecuencia del siguiente sistema
y(n) - A y(n-1) = B x(n).
La respuesta en frecuencia de un sistema se puede calcular como la relación entre la entrada en tiempo y la salida cuando la entrada es de tipo exponencial complejo; es decir:
De esta forma bastaría buscar la particular debida a una excitación de tipo y luego dividir esta solución por la expresión de x(n).
Sin embargo hay un método más sencillo: Se asume que y(n) debe ser del tipo KejΘn. Esto se introduce en la ecuación que rige el comportamiento del sistema para despejar K el cual coincidirá con H(jΘ). Así para el ejemplo propuesto:
Página 8

apuntes señales
Ejemplo 5: Determine la respuesta impulsiva del siguiente sistema
y(n)+0.25y(n-2)=x(n)-2x(n-1)
En primer lugar se buscan las raíces las cuales resultan 0.5j y -0.5j.Esto implica una solución básica para h(n) del tipo
Para conseguir las constantes podemos usar como condiciones iniciales y(0) y y(1) (supondremos el sistema en reposo, es decir, h(n) para n menor que cero será nula)
h(1)+0.25h(-1)=δ(1)-2δ(0)
h(1)=0.5B por lo tanto 0.5B=-2, es decir B=-4
h(0)+0.25h(-2)=δ(0)-2δ(-1)
h(0)=A por lo tanto A=1
Este sistema es estable. Cuando el módulo de las raíces de la ecuación característica sea menor que 1 el sistema será estable. Cuando sea mayor que 1 será inestable y cuando sea exactamente igual estará al borde de la estabilidad.
3.1.2.- Representación de un sistema contínuo mediante ecuaciones diferenciales.
Suponga un sistema descrito por la siguiente relación
2nSen
n
21B
2nCos
n
21A)n(h π+π= ⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛
)n(u2nSen
n
214
2nCos
n
21)n(h
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ π⎟⎠⎞
⎜⎝⎛−π
⎟⎠⎞
⎜⎝⎛=
Página 9
apuntes señales
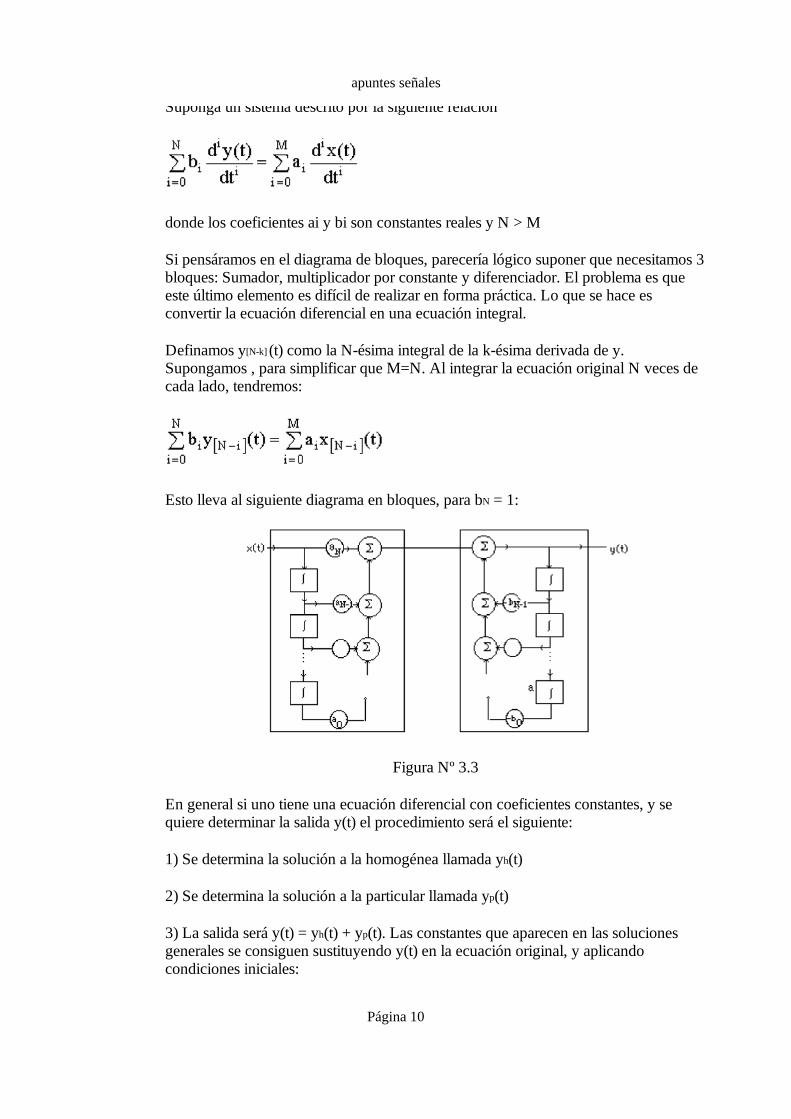
Suponga un sistema descrito por la siguiente relación
donde los coeficientes ai y bi son constantes reales y N > M
Si pensáramos en el diagrama de bloques, parecería lógico suponer que necesitamos 3 bloques: Sumador, multiplicador por constante y diferenciador. El problema es que este último elemento es difícil de realizar en forma práctica. Lo que se hace es convertir la ecuación diferencial en una ecuación integral.
Definamos y[N-k] (t) como la N-ésima integral de la k-ésima derivada de y. Supongamos , para simplificar que M=N. Al integrar la ecuación original N veces de cada lado, tendremos:
Esto lleva al siguiente diagrama en bloques, para bN = 1:
Figura Nº 3.3
En general si uno tiene una ecuación diferencial con coeficientes constantes, y se quiere determinar la salida y(t) el procedimiento será el siguiente:
1) Se determina la solución a la homogénea llamada yh(t)
2) Se determina la solución a la particular llamada yp(t)
3) La salida será y(t) = yh(t) + yp(t). Las constantes que aparecen en las soluciones generales se consiguen sustituyendo y(t) en la ecuación original, y aplicando condiciones iniciales:
Página 10

apuntes señales
Suponga un sistema LIT de tiempo continuo definido como:
Resolvemos primero la homogénea. Es decir la siguiente ecuación:
Esto se resuelve de la siguiente forma:
Se asume una solución del tipo Se sustituye en la ecuación homogénea quedando, luego de factorizar:
La solución no trivial es aquella que cumple
Se buscan las N raíces rk
La solución a la homogénea será la superposición de soluciones asignadas a cada raíz dependiendo de su tipo. Así:
Por cada raíz real ri simple se asigna una solución del tipo
Por cada raíz real ri de multiplicidad p, se asignan m secuencias del tipo
Por cada par de raíces complejas (a ± jb) , se asignan soluciones del tipo
Por cada par de raíces complejas (a ± jb) de multiplicidad p, se toman soluciones del tipo:
Las condiciones iniciales permitirán determinar las constantes de peso de cada solución.
Ejemplo: Determine la solución de la siguiente ecuación:
4.
3.
2.
1.
4.
3.
2.1.
Página 11

apuntes señalesj p g
y'''- y'' + y' -y =0 La ecuación característica a resolver será:
Las raíces de esta ecuación resultan ser j, -j, 1.
Por lo tanto la solución será:
3.1.2.1.- Solución Particular
Usaremos el método de los coeficientes indeterminados que se puede usar cuando la excitación es a su vez solución de alguna ecuación homogénea de coeficientes constantes.
Cuando se tiene una ecuación del tipo
la solución particular es del tipo de x(t) multiplicado por una constante. Así:
- Si x(t) es del tipo
la solución particular tomada será del tipo
- Si x(t) es del tipo
la solución particular tomada será del tipo
-Si x(t) es del tipo
la solución particular tomada será del tipo
-Si x(t) es del tipo
Página 12

apuntes señales
la solución particular tomada será del tipo
-Si x(t) es del tipo
La solución particular tomada será del tipo
-Si x(t) es del tipo :
la solución particular tomada será del tipo
Si la excitación produce salidas del mismo tipo que la homogénea, se aplican las reglas de raíces múltiples.
Ejemplo:
y'' + y = et
La ecuación característica a resolver será:
Las raíces de esta ecuación resultan ser j, -j, . Por lo tanto la solución será:
La solución particular es del tipo
La salida total será:
Al sustituir en la ecuación original:
Página 13

apuntes señales
Esto indica que C3 =1/2
Para calcular C1 y C2 se necesitan las condiciones de borde.
Si por ejemplo se cambia la excitación:
y'' + y = Sen(t)
Como la homogénea ya produce Sent y Cost , a la particular le pondremos tSent y tCost. En ese caso la salida total sería:
Al introducirla en la ecuación original resulta C4 = 0 y C3 = -0.5
Si las condiciones iniciales fuesen por ejemplo y(0)= 1, y'(0) =0 se encontraría C1=1 y C2= 0.5
3.1.2.2.-Determinación de la respuesta al impulso de sistemas descritos por ecuaciones diferenciales con coeficientes constantes
La respuesta al impulso se consigue resolviendo la ecuación diferencial para una excitación x(t) = δ(t). Como esta señal es nula excepto en t=0, el problema se limita a resolver la ecuación homogénea ya que si se asumiera por ejemplo una solución particular igual a δ(t)., al incluirla en la ecuación original, del lado izquierdo aparecen δ ´(t), δ ´´(t) , etc. y esto no se ajusta a la ecuación si a la izquierda no aparecen derivadas de x(t).
En general si se tiene
Se resuelve primero la homogénea:
Luego: La particular es igual a cero excepto si M>=N. En este caso
∑
−
=
δ=
NM
0ii
i
ip dt)t(dC)t(y
Página 14

apuntes señales
Ejemplo:
Un sistema está descrito por la siguiente ecuación: 2y´(t) + 4y(t) = 3x(t). Determine su respuesta al impulso.
Solución:
Se resuelve la homogénea (Se supone solución del tipo C ert ) . La ecuación característica será:
2r +4=0 ; r=-2. Esto produce la siguiente respuesta impulsiva
Al incluir esta solución en la ecuación original quedará:
Ejemplo 2: 2y´(t) + 4y(t) =3x(t)+ x´(t)
Procedimiento Nº1: En este caso la solución debe incluir una delta
Al incluir esta solución en la ecuación original, se obtiene que C=K=0.5.
Procedimiento Nº 2: Como los sistemas son lineales, teniendo la respuesta a la u(t) podríamos hallar la respuesta al impulso derivando la respuesta al escalón. En el ejemplo que estamos analizando, plantearíamos resolver primero la siguiente ecuación 2y´(t) + 4y(t) = u(t). Una vez obtenida esta respuesta la multiplicamos por 3 y le sumamos la derivada ( 3x(t) + x´(t)) y esta sería la solución. Ejemplo 3: 2y´(t) + 4y(t) = x´´(t)
En este caso la solución debe incluir una delta y una primera derivada de la delta
Sustituyendo esta solución global en la ecuación original se pueden despejar C, K y B (Verificar si el resultado es C=2, K=-1 y B=0.5)
3.1.2.3 .-Respuesta en frecuencia o función transferencia de sistemas descritos
)t(B)t(K)t(uCe)t(y 't2 δ+δ+= −
Página 15
apuntes señales
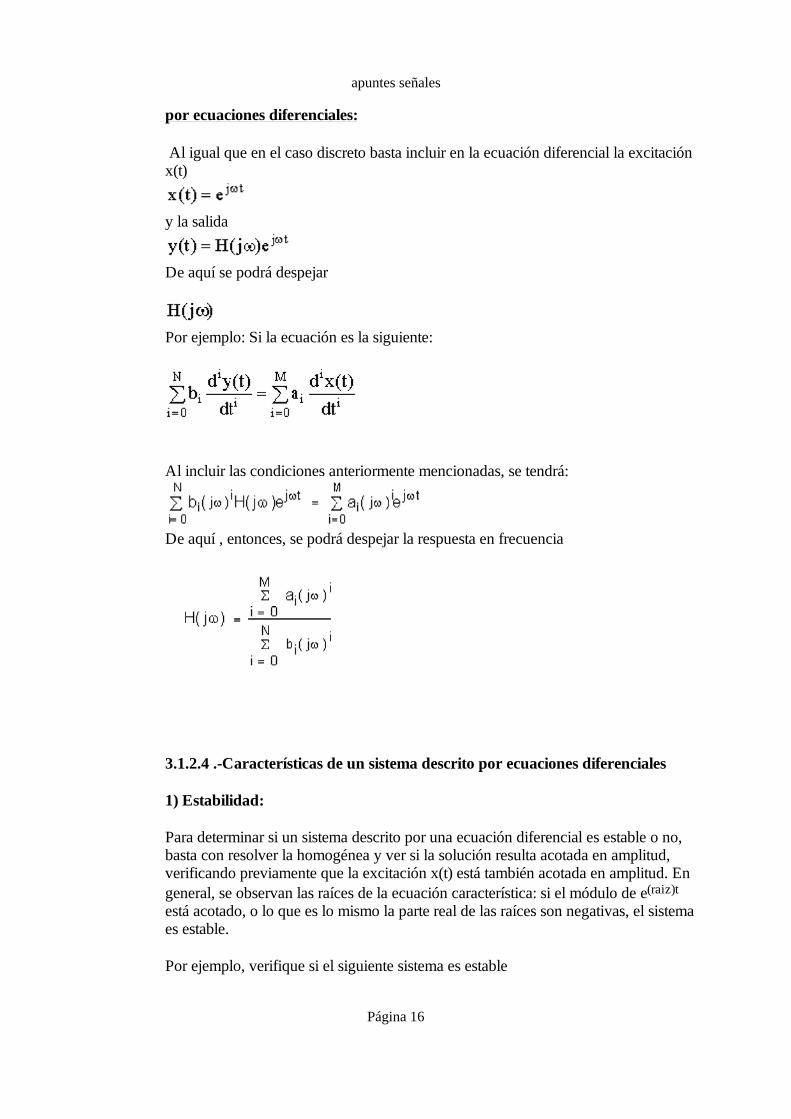
por ecuaciones diferenciales:
Al igual que en el caso discreto basta incluir en la ecuación diferencial la excitación x(t)
y la salida
De aquí se podrá despejar
Por ejemplo: Si la ecuación es la siguiente:
Al incluir las condiciones anteriormente mencionadas, se tendrá:
De aquí , entonces, se podrá despejar la respuesta en frecuencia
3.1.2.4 .-Características de un sistema descrito por ecuaciones diferenciales
1) Estabilidad:
Para determinar si un sistema descrito por una ecuación diferencial es estable o no, basta con resolver la homogénea y ver si la solución resulta acotada en amplitud, verificando previamente que la excitación x(t) está también acotada en amplitud. En general, se observan las raíces de la ecuación característica: si el módulo de e(raiz)t está acotado, o lo que es lo mismo la parte real de las raíces son negativas, el sistema es estable.
Por ejemplo, verifique si el siguiente sistema es estable
Página 16

apuntes señales
y´´(t) -y´(t) + y(t) = x´(t) +x(t)
Al resolver la homogénea se obtienen dos raíces complejas
Esto implica una solución a la homogénea del siguiente tipo
Como se observa las exponenciales hacen crecer la solución hasta el infinito sin ni siquiera haber estimulado el sistema. Por lo tanto el sistema es inestable.
Otra forma de verificar si un sistema descrito por una ecuación diferencial es estable o no es buscar su respuesta impulsiva y ver si esta es absolutamente sumable. Si es asi, el sistema será estable.
Ejemplo
y´(t) -0.5y(t) = x´(t) +x(t)
Aplicando el procedimiento descrito en la sección 3.1.2.2, se determina que la respuesta impulsiva de este sistema es
Si esta función se integra entre 0 e infinito el resultado es infinito. Por lo tanto el sistema es inestable.
Ejercicio propuesto: Determine si los dos sistemas descritos a continuación, a través de su respuesta impulsiva, son estables
a)
b)
2) Causalidad:
j23
21
±
)t(u)t23SenBet
23CosAe()t(y t5.0t5.0 +=
)t()t(ue2)t(h t5.0 δ+=
t2' e)t()t(h −+δ=
))t(u(Sent)2t()t(h −=
Página 17

apuntes señales2) Causalidad:
Nuevamente podemos basarnos en el análisis de la respuesta impulsiva del sistema descrito por una ec. diferencial. Si h(t) es nula para t<0 entonces el sistema es causal.
Por ejemplo el siguiente sistema es causal
Un ejemplo de sistema no causal:
3) Linealidad: Para un sistema descrito por una ecuación diferencial de coeficientes constantes, las condiciones iniciales definen la linealidad o no del mismo.
Observe a través del siguiente ejemplo
y´´(t) + y(t) = x(t)
Al buscar las raíces se obtiene que la solución homogénea para este caso es:
Si ahora suponemos una excitación x1(t), la solución global sería
En cambio si la entrada es x2(t), la solución global sería
Si la excitación es ahora x1(t)+x2(t), la salida sería
Se puede demostrar que, solo para determinadas condiciones iniciales se cumple la linealidad.
Por ejemplo si y(0)=y'(0)=0, entonces A=B=0, la solución a la homogénea es cero
Si y(0)=y'(0)=1, entonces A=B=1 la solución a la homogénea no es cero
Ejercicio propuesto: Resuelva el problema anterior suponiendo x1(t)=e-2t y x2(t)=e-t
))t(u(Sent)2t()t(h −=
t2' e)t()t(h −+δ=
BSentACost)t(yh +=
1pyBSentACost)t(y ++=
2pyBSentACost)t(y ++=
2p1pyBSentACost)t(y +++=
Página 18
apuntes señales
Varíe las condiciones iniciales y verifique si el sistema es lineal o no
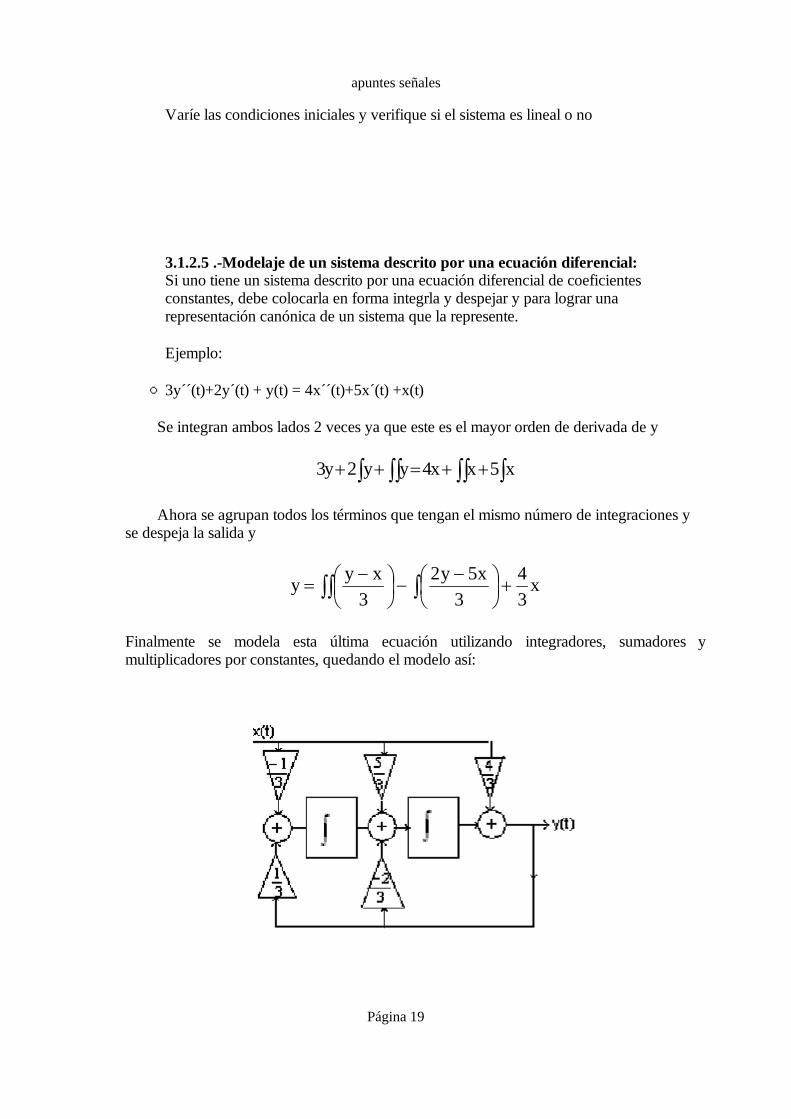
3.1.2.5 .-Modelaje de un sistema descrito por una ecuación diferencial:Si uno tiene un sistema descrito por una ecuación diferencial de coeficientes constantes, debe colocarla en forma integrla y despejar y para lograr una representación canónica de un sistema que la represente.
Ejemplo:
3y´´(t)+2y´(t) + y(t) = 4x´´(t)+5x´(t) +x(t)
Se integran ambos lados 2 veces ya que este es el mayor orden de derivada de y
Ahora se agrupan todos los términos que tengan el mismo número de integraciones y se despeja la salida y
Finalmente se modela esta última ecuación utilizando integradores, sumadores y multiplicadores por constantes, quedando el modelo así:
∫∫∫ ∫∫∫ ++=++ x5xx4yy2y3
x34
3x5y2
3xyy +⎟
⎠⎞
⎜⎝⎛ −
−⎟⎠⎞
⎜⎝⎛ −
= ∫∫∫
Página 19
apuntes señales
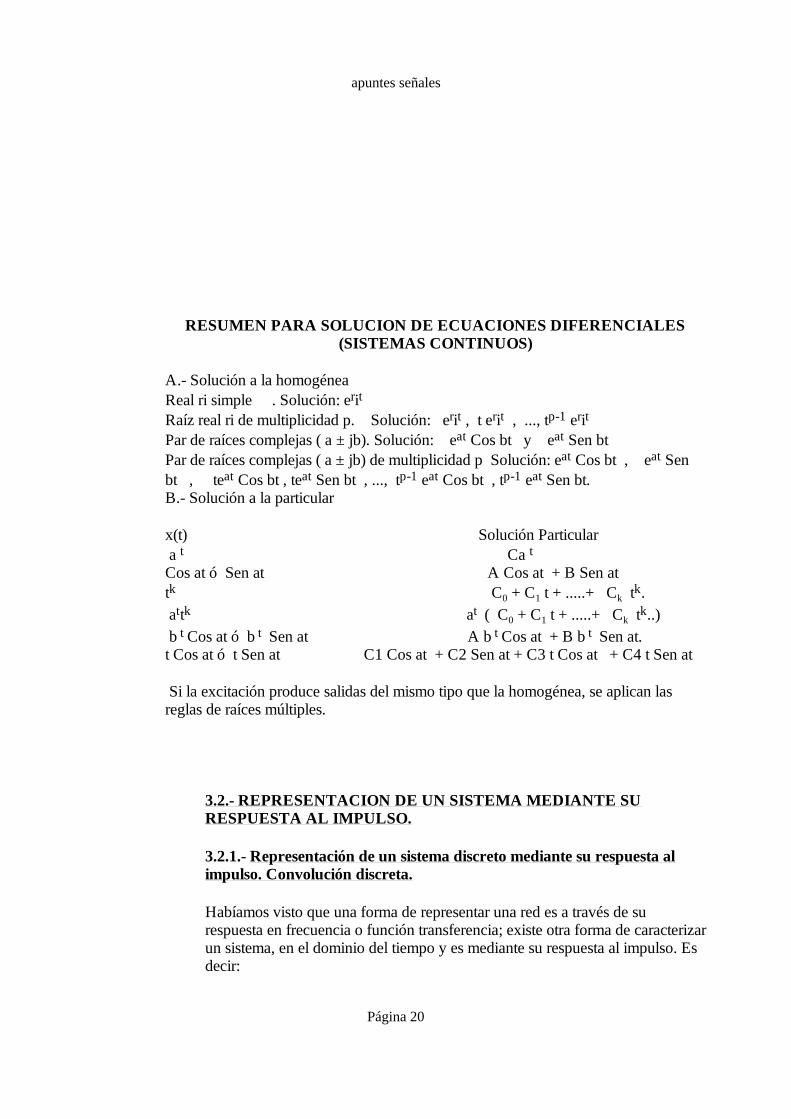
RESUMEN PARA SOLUCION DE ECUACIONES DIFERENCIALES (SISTEMAS CONTINUOS)
A.- Solución a la homogénea Real ri simple . Solución: erit Raíz real ri de multiplicidad p. Solución: erit , t erit , ..., tp-1 erit Par de raíces complejas ( a ± jb). Solución: eat Cos bt y eat Sen bt Par de raíces complejas ( a ± jb) de multiplicidad p Solución: eat Cos bt , eat Sen bt , teat Cos bt , teat Sen bt , ..., tp-1 eat Cos bt , tp-1 eat Sen bt. B.- Solución a la particular
x(t) Solución Particular a t Ca t Cos at ó Sen at A Cos at + B Sen at tk C0 + C1 t + .....+ Ck tk. attk at ( C0 + C1 t + .....+ Ck tk..) b t Cos at ó b t Sen at A b t Cos at + B b t Sen at. t Cos at ó t Sen at C1 Cos at + C2 Sen at + C3 t Cos at + C4 t Sen at
Si la excitación produce salidas del mismo tipo que la homogénea, se aplican las reglas de raíces múltiples.
3.2.- REPRESENTACION DE UN SISTEMA MEDIANTE SU RESPUESTA AL IMPULSO.
3.2.1.- Representación de un sistema discreto mediante su respuesta al impulso. Convolución discreta.
Habíamos visto que una forma de representar una red es a través de su respuesta en frecuencia o función transferencia; existe otra forma de caracterizar un sistema, en el dominio del tiempo y es mediante su respuesta al impulso. Es decir:
Página 20

apuntes señales
Figura Nº 3.4
Cuando x(n)= δ (n), la salida y(n), la cual llamaremos h(n), será la respuesta al impulso o respuesta impulsiva. Como el sistema es lineal e invariante en el tiempo, la respuesta a x(n) = A δ (n-k) será Ah(n-k).
Esto nos permitirá conocer la respuesta a cualquier entrada arbitraria x(n) ya que siempre podemos expresar a x(n) como:
Por lo tanto aplicando superposición
Esto se conoce como convolución discreta o suma de convolución entre la entrada (definida por los ak) y la respuesta impulsiva h(n)
y(n) = x(n) * h(n)
La convolución discreta tiene las siguientes propiedades:
1) Conmutatividad
x(n)*y(n)= y(n)*x(n)
2) Asociatividad:
(x(n)*y(n))*w(n) = x(n)*(y(n)*w(n))
Esto es aplicable por ejemplo si queremos determinar la salida para la cascada de 2 sistemas con respuesta impulsiva h1(n) y h2(n) respectivamente. Esta propiedad permite concluir que el orden de colocación de los sistemas no es importante
(x(n)* h1(n))*h2(n) =(x(n)* h2(n))*h1(n)
3)Distributividad
(x(n)+y(n))*w(n) = x(n)*w(n) + y(n)*w(n)
Página 21
apuntes señales( ( ) y( )) ( ) ( ) ( ) y( ) ( )
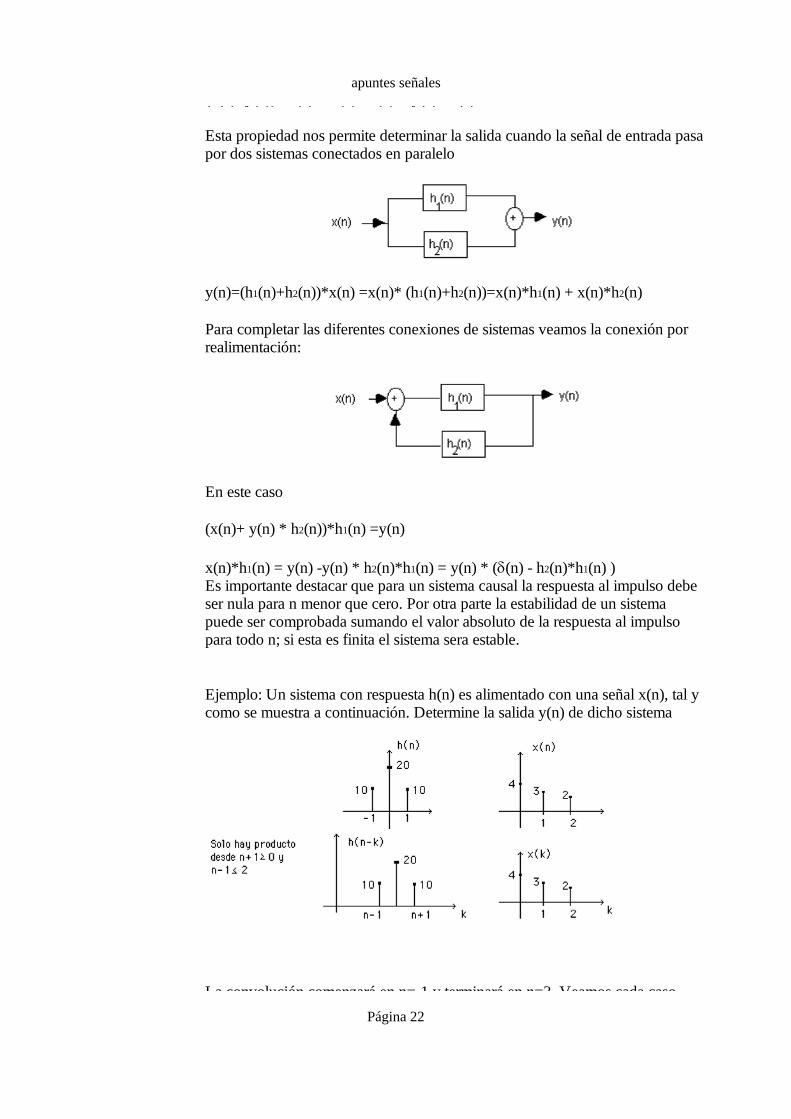
Esta propiedad nos permite determinar la salida cuando la señal de entrada pasa por dos sistemas conectados en paralelo
y(n)=(h1(n)+h2(n))*x(n) =x(n)* (h1(n)+h2(n))=x(n)*h1(n) + x(n)*h2(n)
Para completar las diferentes conexiones de sistemas veamos la conexión por realimentación:
En este caso
(x(n)+ y(n) * h2(n))*h1(n) =y(n)
x(n)*h1(n) = y(n) -y(n) * h2(n)*h1(n) = y(n) * (δ(n) - h2(n)*h1(n) ) Es importante destacar que para un sistema causal la respuesta al impulso debe ser nula para n menor que cero. Por otra parte la estabilidad de un sistema puede ser comprobada sumando el valor absoluto de la respuesta al impulso para todo n; si esta es finita el sistema sera estable.
Ejemplo: Un sistema con respuesta h(n) es alimentado con una señal x(n), tal y como se muestra a continuación. Determine la salida y(n) de dicho sistema
La convolución comenzará en n= 1 y terminará en n=3 Veamos cada casoPágina 22
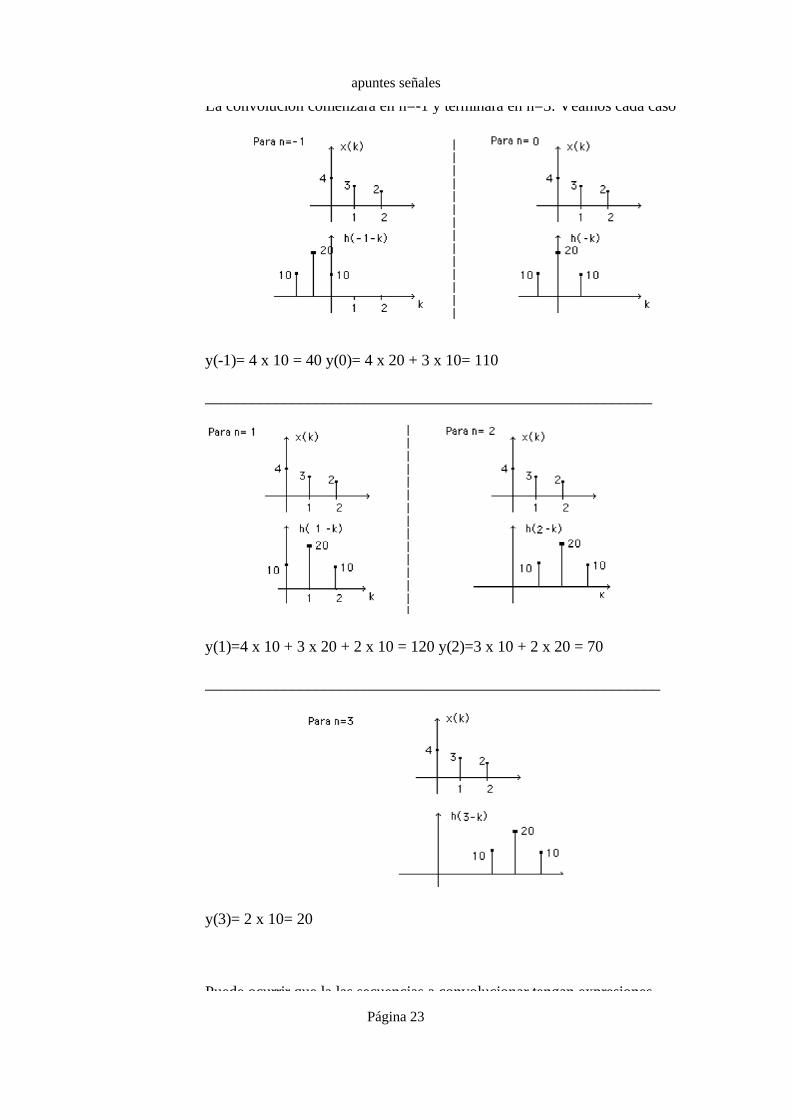
apuntes señalesLa convolución comenzará en n=-1 y terminará en n=3. Veamos cada caso
y(-1)= 4 x 10 = 40 y(0)= 4 x 20 + 3 x 10= 110
________________________________________________________
y(1)=4 x 10 + 3 x 20 + 2 x 10 = 120 y(2)=3 x 10 + 2 x 20 = 70
_________________________________________________________
y(3)= 2 x 10= 20
Puede ocurrir que la las secuencias a convolucionar tengan expresionesPágina 23

apuntes señalesPuede ocurrir que la las secuencias a convolucionar tengan expresiones cerradas, en cuyo caso la convolución también se podrá expresar a través de una fórmula cerrada. Por ejemplo:
Sea x(n) = 2u(n)
h(n) = (0.5)n u(n)
Como la convolución se calcula como:
Para llegar al resultado debemos referirnos a la siguiente tabla de series geométricas:
n1 y n2 pueden ser positivos o negativos con n1 menor que n2
En nuestro caso el resultado sería el siguiente
Página 24
apuntes señales
3.2.2.- Representación de un sistema contínuo mediante su respuesta al impulso. Convolución.
Al igual que en el caso discreto, al conocer la respuesta al impulso de un sistema, será posible calcular la salida de dicho sistema a cualquier excitación a través de, en este caso, la integral de convolución?.
El problema se plantea en estos términos: Si cuando x(t) = δ(t), la salida y(t) llamada respuesta impulsiva será h(t). ¿Cómo se determinará la salida cuando x(t) sea una señal arbitraria?.
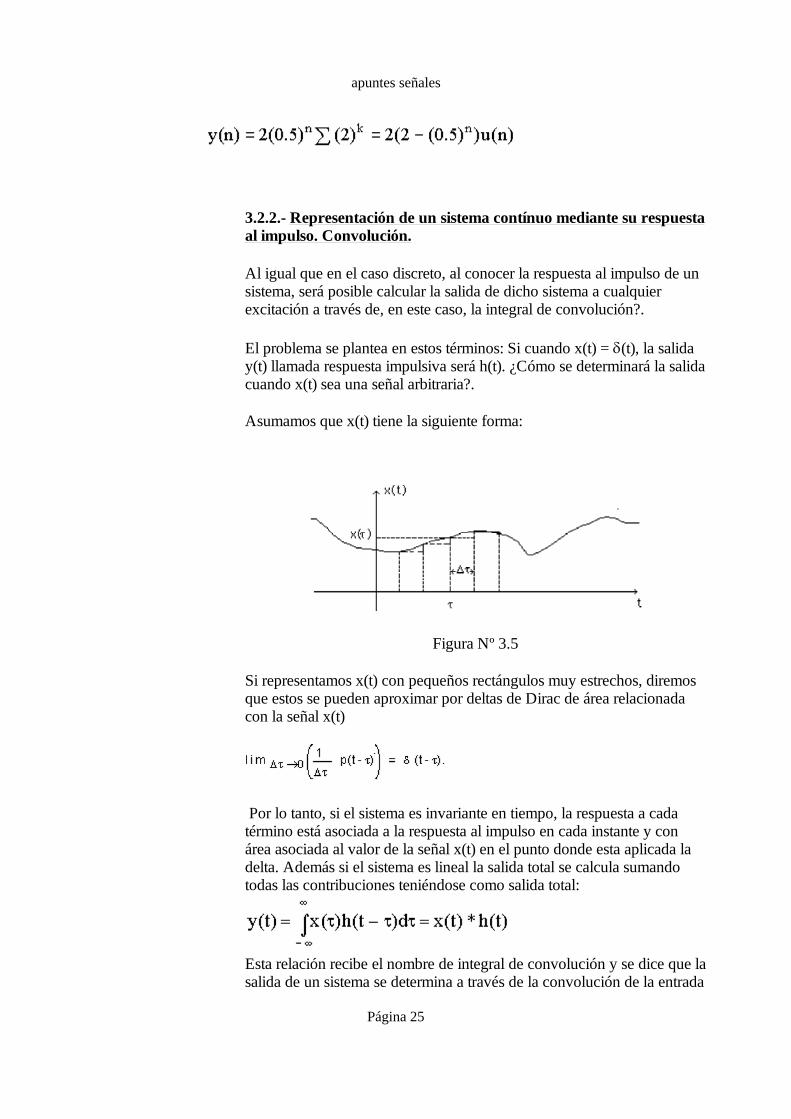
Asumamos que x(t) tiene la siguiente forma:
Figura Nº 3.5
Si representamos x(t) con pequeños rectángulos muy estrechos, diremos que estos se pueden aproximar por deltas de Dirac de área relacionada con la señal x(t)
Por lo tanto, si el sistema es invariante en tiempo, la respuesta a cada término está asociada a la respuesta al impulso en cada instante y con área asociada al valor de la señal x(t) en el punto donde esta aplicada la delta. Además si el sistema es lineal la salida total se calcula sumando todas las contribuciones teniéndose como salida total:
Esta relación recibe el nombre de integral de convolución y se dice que la salida de un sistema se determina a través de la convolución de la entrada
Página 25

apuntes señales
con su respuesta impulsiva.
Convolución gráfica
Esto permite encontrar la convolución de 2 señales de una manera muy sencilla. Veamos esto a través de un ejemplo:
Grafiquemos ahora x(τ) y h(t- τ) ( recordemos que ahora la variable es τ)
Hay que observar para cuales intervalos de t el producto x(τ)h(t- τ) no es nulo. De la figura anterior se observa que para -1 > 0.5+t y 1< -2+t el producto es nulo, o sea, para t menor que -1.5 y t mayor que 3 la convolución se hace cero.
Por otra parte el producto de las señales toma diferentes valores dependiendo del valor de τ. Así:
Página 26

apuntes señales
Observe que los gráficos extremos dan la existencia en t de la integral de convolución, mientras que el gráfico intermedio proporciona los límites de la integral.
Propiedades de la convolución contínua
1) Conmutatividad
x(t) * y(t) = y(t) * x(t)
2) Asociatividad
( ) * ( ( ) * ( )) ( ( ) * ( ) )* ( )Página 27

apuntes señales
x(t) * ( y(t) * w(t)) = ( x(t) * y(t) )* w(t)
3) Distributividad
(ax(t) + by(t) ) * w(t) = a x(t) * w(t) + by(t) * w(t)
4) Derivación
d/dt [x(t) * y(t)] = x(t) * dy(t)/dt = y(t) * dx(t)/dt
5) Convolución con impulso unitario
x(t) * δ ( t-t1) = x(t- t1 )
Respuesta al escalón
En la práctica, es imposible generar un impulso. Por esta razón, para determinar la respuesta impulsiva de una red se hace lo siguiente:
1) Se excita la red con un escalón unitario (más fácil de sintetizar). La salida a esta señal la llamaremos yu(t)
2) La derivada de yu(t) será la respuesta impulsiva.
Demostración: yu(t) = u(t) * h(t)
d/dt[ yu(t) ] = [du(t)/dt] * h(t) = δ(t) * h(t) = h(t)
Otra forma de determinar la salida de un sistema a una determinada entrada es tratar de representar dicha excitación como combinación de funciones a las cuales si le conocemos la respuesta. De esta manera la salida será la combinación de las respuestas a las entradas que componen la excitación .
Ejemplo: Si la respuesta de un sistema LIT al escalón es y1(t), determine la respuesta a la señal x2(t) mostrada.
Una forma práctica de resolver este problema es la siguiente: Dado que y1(t) es la respuesta al escalón (u(t)), expresemos x2(t) como combinación de escalones. Luego encontraremos la respuesta total por superposición de las salidas .
Página 28
apuntes señales
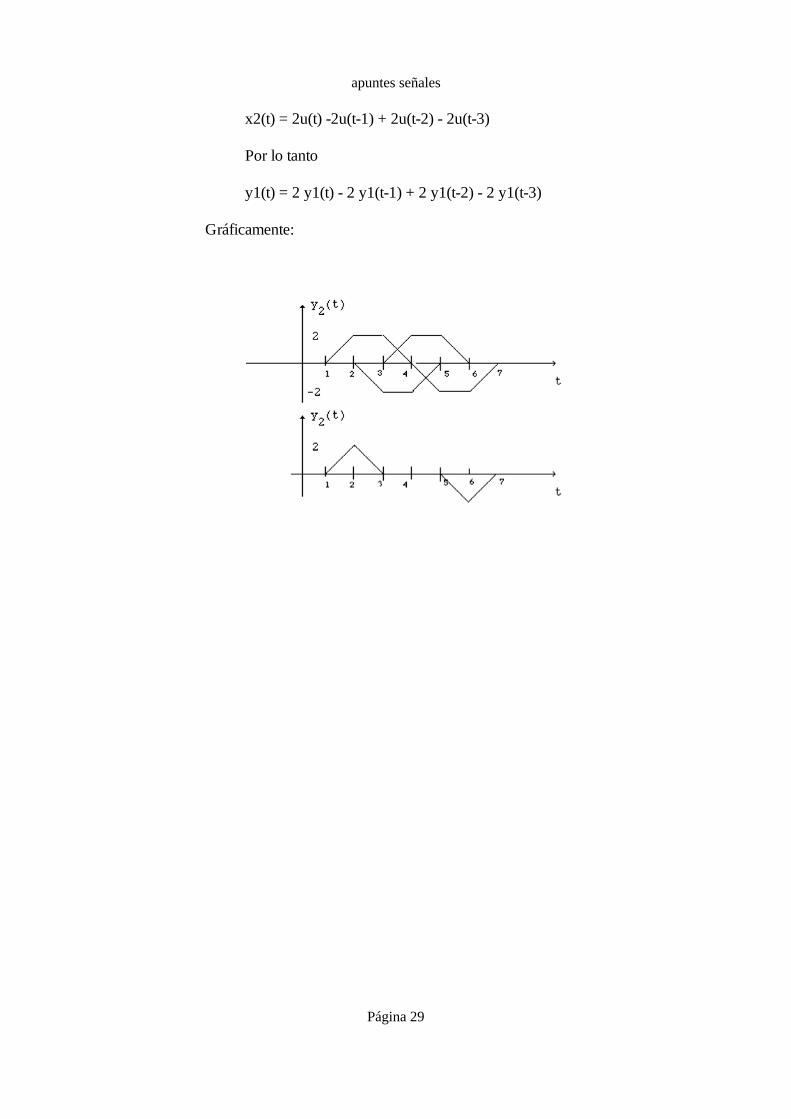
x2(t) = 2u(t) -2u(t-1) + 2u(t-2) - 2u(t-3)
Por lo tanto
y1(t) = 2 y1(t) - 2 y1(t-1) + 2 y1(t-2) - 2 y1(t-3)
Gráficamente:
Página 29