an investigation of north-finding using a …crawford/2017_euroobs_workshop... · downhole mapping...
TRANSCRIPT

AN INVESTIGATION OF NORTH-FINDING
USING A MEMS GYROSCOPE
by
René Robért
Submitted in partial fulfillment of the
requirements for Departmental Honors in
the Department of Engineering
Texas Christian University
Fort Worth, Texas
May 2, 2014

ii
AN INVESTIGATION OF NORTH-FINDING
USING A MEMS GYROSCOPE
Project Approved:
Supervising Professor: Stephen Weis, Ph.D.
Department of Engineering
Robert Bittle, Ph.D.
Department of Engineering
Ken Richardson, Ph.D.
Department of Mathematics

iii
ABSTRACT
Navigational mapping of subsurface holes drilled for oil and gas
production is required by law. Currently, mapping a drilled hole requires the use
of expensive gyroscopes to determine azimuthal direction (e.g., North, West etc.).
However, MEMS (micro-electro-mechanical-systems) gyros are now
commercially available and are orders of magnitude less expensive than current
downhole spinning mass gyros. Unfortunately, they are not accurate enough to be
used for downhole mapping.
Determining the azimuth of a subsurface hole requires a gyro to measure a
component of the rotation of the earth. At Fort Worth’s latitude, a gyro pointed
North would measure a rotation rate of 0.0035 degrees/second; while a gyro
pointed East would measure zero degrees/second. Unfortunately, the drift of
MEMS gyro-measured rotation rate is much larger than earth’s rotation rate. Our
experimental work indicates that MEMS gyro signals can be averaged and
combined to improve the signal-to-noise ratio and subsequently reduce error.

iv
TABLE OF CONTENTS
INTRODUCTION ..............................................................................................................1
GYROSCOPES...................................................................................................................1
MEMS .................................................................................................................................2
Analog Devices AD646 ..........................................................................................2
Sensonor STIM210 .................................................................................................4
CHARACTERIZATION ....................................................................................................5
Allan Variance ........................................................................................................5
COLLECTING DATA .......................................................................................................8
Maytagging .............................................................................................................9
East-Seeking ...........................................................................................................9
Carouselling .......................................................................................................... 10
Optimum Parameters ............................................................................................ 10
Variables ............................................................................................................... 12
Table ......................................................................................................... 12
Circuit Board ............................................................................................. 12
Power Source ............................................................................................ 13
Slip Rings .................................................................................................. 13
FILTERS ........................................................................................................................... 13
Original Filter........................................................................................................ 14
Updated Filter ....................................................................................................... 16
Swanson and Schlamminger ................................................................................. 17
Next Nearest and Next Next Nearest Neighbor .................................................... 18
Sliding Average .................................................................................................... 18
CONCLUSIONS............................................................................................................... 19

v
Repeatability ......................................................................................................... 19
Ergodicity .............................................................................................................. 19
FUTURE WORK .............................................................................................................. 20
REFERENCES ................................................................................................................. 21

1
INTRODUCTION
The goal of my research project was to continue the research into determining
azimuthal north with a micro-electro-mechanical system (MEMS) gyroscope. The
application for this research is downhole mapping. Downhole mapping requires point-
by-point measurement of depth, inclination, and azimuth. Depth and inclination are
relatively easy to measure; measuring azimuth is much more difficult. The determination
of azimuthal direction done by a gyroscope is known as gyrocompassing.
Oil and gas companies in Texas are required by the Railroad Commission of
Texas to map the subsurface where they are drilling. Companies currently use a variety
of different gyroscopes for these applications such as macro-scale fiber optic, ring laser,
and quartz hemispherical resonator gyroscopes. These gyroscopes are very large and
expensive. MEMS gyroscopes are now being considered for gyrocompassing since they
are both cheaper and smaller; however, current MEMS gyroscopes’ measurements are
considered unreliable. The ultimate goal of our research is to eventually create a
procedure for taking data in about a minute that can then be filtered to determine the
earth’s rotation rate that will allow the tool to determine azimuth.
GYROSCOPES
Gyroscopes measure rotation rates and have a variety of uses. They are often
spinning bodies and can be found in toys and cellphones among others. They are even
used to balance a moving system such as a Segway. However, I will focus on their use in
measuring the rotation rate of the earth. From determining the rotation rate of the earth,
the azimuthal direction can be determined through the use of trigonometry. For example,
since we know the latitude of Fort Worth, we can determine the y-component of the

2
rotation rate at Fort Worth, rotation rate facing North.
( ) . The current gyroscopes used
for this function are very expensive, large spinning mass gyros. Our hope is that we can
substitute this kind of gyro with a MEMS gyroscope.
MEMS
MEMS or micro-electro-mechanical systems is a growing area of the electrical
sensor industry. MEMS technology has many potential applications in numerous areas.
One of the first applications of MEMS technology was in accelerometers in automobiles
to detect collisions and thus deploy airbags. MEMS devices often provide an alternative
to current technology in a chip form. MEMS gyroscopes are much less expensive and
smaller than those currently used. The problem, however, is that MEMS gyroscopes are
not as accurate as their counterparts. Through the use of filters, we hope to be able to
determine the azimuthal direction that the gyroscope is facing based on the measurement
of the rotation rate of the Earth. The two gyroscopes that were used in testing are the
Analog Devices AD646 and Sensonor STIM210.
Analog Devices AD646
The AD646 is pictured in Figure 1 and was the
less expensive of the two, costing about $135. It
measures the rotation rate of the earth through the use
of sensors inside of the chip. The chip contains inner
sensors that measure displacement due to the force
generated by the Coriolis Effect on a rotating system.
These inner sensors interact with outer sensors in order
Figure 1: Picture of the Analog
Devices AD646 MEMS
Gyroscope

3
to create a capacitive signal proportional to the angular rate based on the Coriolis Effect.
The capacitive signal is transferred to an output voltage. This output voltage can then be
converted to rotation rate in degrees/second through the use of the 0.009
V/(degrees/second) conversion rate provided by Analog Devices. Analog Devices claims
that its gyros are able to eliminate small vibrations as noise. It advertises its ability to
have vibration stability as its most important feature. The quad-sensor design contained
by the AD6464 allows for this feature. The four sensors are connected in such a way that
a new “zero” is created based on the common signal experienced by the four sensors;
therefore, the chip can eliminate both linear and angular acceleration resulting in the
rejection of shock and vibration. This is an ideal trait for the gyroscope due to the nature
of the work it will perform. The gyro will be subject to numerous vibrations during
underground measurements; therefore, to be able to filter that noise out and be left with
just the rotation rate data is important.
A common trait used to characterize the drift performance of gyroscopes is
through a parameter called bias instability. Data sheets provide a bias stability for the
given gyro that can be defined as lowest bias stability able to be achieved for the gyro. It
can be determined for a given gyro by looking at the Allen Variance of the gyro. The
lowest bias stability is the optimum parameter for taking data since it is the longest time
frame where data averaging reduces error. Analog Devices provides that the bias
instability of the AD646 is 12°/hr. This means that over the course of an hour, the gyro’s
error due to drift is 12°.
The AD646 gyroscope requires a 6 volt power supply ± 0.15 V. Since the output
of the AD646 is an analog voltage, the AD646 required a separate data acquisition

4
package called LabJack. The gyro connects to LabJack with a circuit board in order to
collect the different output signals such as ground, output voltage, and temperature. The
circuit board is also used in order to place an initial low-pass filter through the use of a
voltage divider and capacitors. LabJack connects to the computer through the use of an
USB port and reads MATLAB scripts. The gyro is mounted on an Aerotech A3200
rotation table, which is also able to be controlled by a Matlab script. Therefore, a single
script was created to control both data acquisition and the rate table.
Sensonor STIM210
The Sensonor STIM210 gyro was borrowed for a semester to perform
measurements and compare those to the AD646. The
STIM210 is a more expensive gyroscope costing $5,780;
however, it also has a much higher accuracy as seen by its
bias instability of 0.5°/hr. The Sensonor gyro is a three
axis self-contained miniature package as seen in Figure 2.
In addition to excellent performance in vibration and
shock as was true with the AD646, the STIM210 is also
compensated for drift due to temperature effects. It is
connected to the computer through the use of two USBs, one for power and the other for
data collection. Sensonor provides its own software package to handle the data
acquisition, which allowed for a simpler setup since no other hardware or software was
required to collect data or to power the gyro. The software provided a simple digital
interface that allowed the parameters of the testing to be controlled. Matlab was still used
in order to control the rotation table when running tests.
Figure 2: Picture of the
Sensonor STIM210 MEMS
Gyroscope package

5
CHARACTERIZATION
In order to minimize the amount of error in a gyroscope, it is first important to
understand the errors that are prevalent. Ideally a gyro would measure zero when it is not
experiencing any rotation; however, this is not true. Some error inducing factors include
temperature effects, null bias drift, outside forces, and incorrect characterization among
others. Bias drift is the tendency for the gyro to drift over a period of time. To minimize
the null bias of a gyro it is important to reduce all of these factors if possible. One of the
main reasons that the AD646 was chosen is that it reduces the effect that external
vibration has on a rotation measurement. The STIM210 enhances bias error reduction
even more by self-compensating for the effects of temperature. Correctly characterizing
the gyro is also an important step in order to minimize the amount of error.
Allan Variance
A common method to characterize gyroscopes is through a parameter called Allan
Variance or Allan Deviation.
( )
( )∑( ( ) ( ) )
A graph of the square root of AVAR vs τ on a log-log plot can be analyzed in order to
determine the optimum parameter to collect data. The y-axis of Allan deviation is the
bias stability of the gyro; consequently, the minimum point on the y-axis corresponds
with the ideal duration for taking data in the x-axis.

6
Analog Devices provides the Allan Deviation plot in Figure 3 in the data sheet for
the AD646. By looking at the plot, it can be determined that the minimum root Allan
Deviation or bias stability is 12°/hr corresponding to an average time between thirty and
forty seconds. Although Analog Devices characterizes each of the gyros, it is also
important to characterize the gyros that will be used for testing. To characterize the gyro
we used, data was collected for a period of time such as one hour while the gyro
remained in the same direction. This data was placed in either a script that we created in
Matlab to calculate the Allan Variance and produce a plot or a program called Alavar 5.2,
which returned similar information. The output plot of the Matlab script for the AD646
is pictured in Figure 4. As is seen by the plot, the minimum Allan Variance occurs at
34.5 seconds. The parameter that we determined through our own characterization
appears to match fairly closely to the plot from the data sheet.
Figure 3: Typical Root Allan
Deviation at 25°C vs
Averaging Time for the
AD646

7
Figure 4: Allan Variance Plot
generated with the Matlab
script for the AD646. Plot of
Allan Variance vs Averaging
Time
Sensonor provides a similar plot for root Allan Variance in their data sheet for the
STIM210 as seen in Figure 5. The minimum point of bias stability occurs at a
considerably longer duration for the STIM210, as the averaging time is about 1000
seconds for all three of the axes. Figure 6 depicts a plot of the Allan Variance for the
STIM210 that was created using Alavar 5.2. The minimum point occurs at a time
constant, τ, of 32,768 which translates to about 4.4 minutes with a bias stability of about
0.7 °/hr. However, 4.4 minutes is too great of a period to collect data, so we looked at the
point when the time constant was 2,048 and its duration was 16.4 seconds which
provided an error of 1.6°/hr. This point allowed a large tradeoff in time without
sacrificing the bias stability too greatly. These two characterization tests provided the
starting durations that were used in creating a procedure for data acquisition for each of
the gyroscopes.

8
COLLECTING DATA
After the characterizing each gyro, a procedure for collecting data for azimuthal
measurements was created. The Earth’s rotation rate can be measured using static and
dynamic methods. Static methods involve taking data while the gyro remains stationary,
while dynamic methods take data while the gyro is moving.
Figure 5: Typical Root
Allan Deviation vs
Averaging Time for
the three axes of the
STIM210
Figure 6: Allan
Deviation vs Time
Constant for the
STIM210
generated using
Alavar 5.2

9
Maytagging
For most of our testing, we used a static method called “maytagging.” This
process gets its name from the motion of a washing machine. This procedure is done by
facing the gyro in a given direction while collecting data for the desired interval. The
gyro then rotates 180° and remains there for the same interval, then returning to the
original position by rotating -180 degrees. This procedure is repeated ten times for a
single data set; therefore, measurements are taken during twenty intervals. Since Allan
Variance characterization should minimize error for 32 seconds averaging time, that was
the interval used for the AD646. Maytagging was chosen as the primary means of
measuring the Earth’s rotation rate since it allows for some cancellation of error when
calculating the rotation rate. When taking the average of the adjacent signals, some of
the bias error is removed as seen in the equation. A majority of the error is removed, but
( ) ( )
due to the nature of instability in the bias error significant error remains. In addition to
the two-point maytagging described, we also looked at four-point maytagging.
East-Seeking
Maytagging was our most successful method for measuring the rotation rate of the
Earth, but we also experimented with another static method which we called East-
Seeking. The East-Seeking algorithm builds on maytagging to find East. It involves
orienting the gyro in a random direction, and then begins maytagging at that point. After
the gyro gets a reading of its direction, it tries to correct itself based on the rotation rate
that was measured. This process is repeated until the gyro correctly measures East.
Based on the amount the gyro adjusted, we can determine which direction it was

10
originally facing. This script provided some promising results with the AD646 at first;
however, it was determined that the gyro was not stable enough in order to further
investigate the script in the current setup.
Carouselling
One dynamic method we used was “carouselling.” Carouselling involves taking
data as the gyro continually spins. The results of this test should produce a sine wave,
which can then be examined to locate specific points on the wave. The peaks would be
North and South, while the intercepts are East and West. Due to the bias noise of the
gyro, the signal was indistinguishable and was quickly deemed useless with the AD646.
Optimum Parameters
Although we determined the optimum averaging duration for each gyro, we also
experimented with various durations and column lengths. For each of the gyros, we took
data at half and double the parameter determined from Allan Variance. For the AD646,
we took data with durations of 16, 34, and 68 seconds at maytagging stops. After
comparisons between data sets, it was determined that the better results occurred at the 34
second duration. Since the STIM210 had a different characterization, we used durations
of 8, 16, and 32 seconds. The idea for taking various lengths originally started by
thinking that the Allan Variance time is actually the time for one complete cycle
compared to just one stop.
In addition to changing the duration of each stop, we also looked at the number of
columns or stops in a data set. The standard set of data originally consisted of ten
complete cycles of maytagging or twenty stops for both gyros. This was chosen
arbitrarily because a complete cycle was not too lengthy and it allowed the rotation rate
11
to be calculated as an average of ten rotation rates. We were uncertain as to whether the
number of columns was significant. We wanted to be able to somewhat definitively state
what the optimum number of columns should be as we did with the duration. To figure
out the number of columns chosen per data set for the AD646, we came up with the idea
of taking the Allan variance for all of the calculated rotation rates for a given set of data.
To do this, we took a data set of 108 columns which would give us an Allan variance
graph with six points (1,2,4,8,16,32). The Allan Variances for these runs were calculated
using Alamath 5.2. We determined that the 32 columns points had too great of an error
bar and should not be used even though they usually were the lowest value. Therefore,
we were left with the 16 columns point. This means that the optimum number of
columns per data set should be around the 16 – 20 columns per data set.
When comparing the amount of columns to the rotation rates they provided, we
saw that the rotation rate did not always improve by that much from 20 columns to 108
columns for the AD646. In fact, sometimes it got worse. Therefore, we concluded that
collecting 20 columns was better than 108 for data, especially due to the time difference
between the two. In the future, we decided to take 18 columns per data set since it is in
the middle of the range. The other common data set for the STIM210 contained 100
complete cycles. These large data sets were done to be more versatile. Although the
long data sets did not work well for the AD646, it worked really well for the STIM210.
We could look at the data set as a whole or break it into ten sets of ten rotation rates.
This also allowed for easier testing in that the gyro could be left unattended for an
extended period of time.
12
Variables
Table
Throughout the course of my research, we experimented with a number of
different experimental variables. The first major variable that was adjusted was the table
on which data was taken. The table used for the lab is an optics table. Optics tables are
designed to minimize vibrations experienced by the table. This is done by having the
legs of the table fill up with air creating an air cushion between the ground and
workspace. Optics work is very sensitive, so these tables help nullify any vibrations that
would normally be transferred through the ground. Initially, all of our testing was done
with the table “floating.” It was suggested that we try to take data when the table rested
on the actual legs with the air removed. I performed a comparison of five data sets with
each variable. Overall, when the table was resting on its legs the percent error was less
than the percent error when the table was floating, 10.9% and 16.6% respectively.
Therefore, all future testing was done while the table was resting on its legs.
Circuit Board
Another variable that was adjusted for the AD646 was the elimination of the
circuit board or breadboard. A breadboard was originally needed as a voltage divider and
in order to place a preliminary filter on the signal. The idea was that the extra wiring
required for the breadboard created extra noise, so we sought to remove it from the
system in order to compare results. To do this, we simply added the capacitors and
wiring directly into the LabJack ports. However, no noticeable result was achieved after
removing the breadboard.

13
Power Source
As mentioned previously, the AD646 required a 6 V power source. For most of
our testing we used an Agilent 6614C for this power source. It occurred to us that this
source may be noisy; therefore we looked to replacing this with 4 AA batteries. AA
batteries have a voltage of 1.5V each, so four of them should equal 6 V. However, this
was not the case. The four fully charged batteries resulted in a voltage of 6.18 V.
Connecting the four batteries to the gyro resulted in frying the AD646 chip. Although we
thought about trying the batteries as a source again after they have been drained to 6 V,
we never replaced the power source.
Slip Rings
Based on our efforts to reduce noise in the system, we also looked at using the
slip rings in the rate table. This would allow us to use shorter wires in addition to
removing the movement of the wires while the rate table is spinning. The wires were
soldered into the input at the top of the rate table. The signals then move through the rate
table through the use of slip rings. The LabJack can then be soldered to the output of the
slip rings at the back of the rate table completing the circuit once again. We tested the
viability of this option through the use of an oscilloscope. By hooking up a power source
to the input and an oscilloscope to the output, we were able to determine that the slip
rings did not seem to add measurable noise. The slip rings were used in all
subsequent testing.
FILTERS
Once the data was taken, we could then begin the filtering process in order to
determine the rotation rate measured by the gyroscope. My research with this project
14
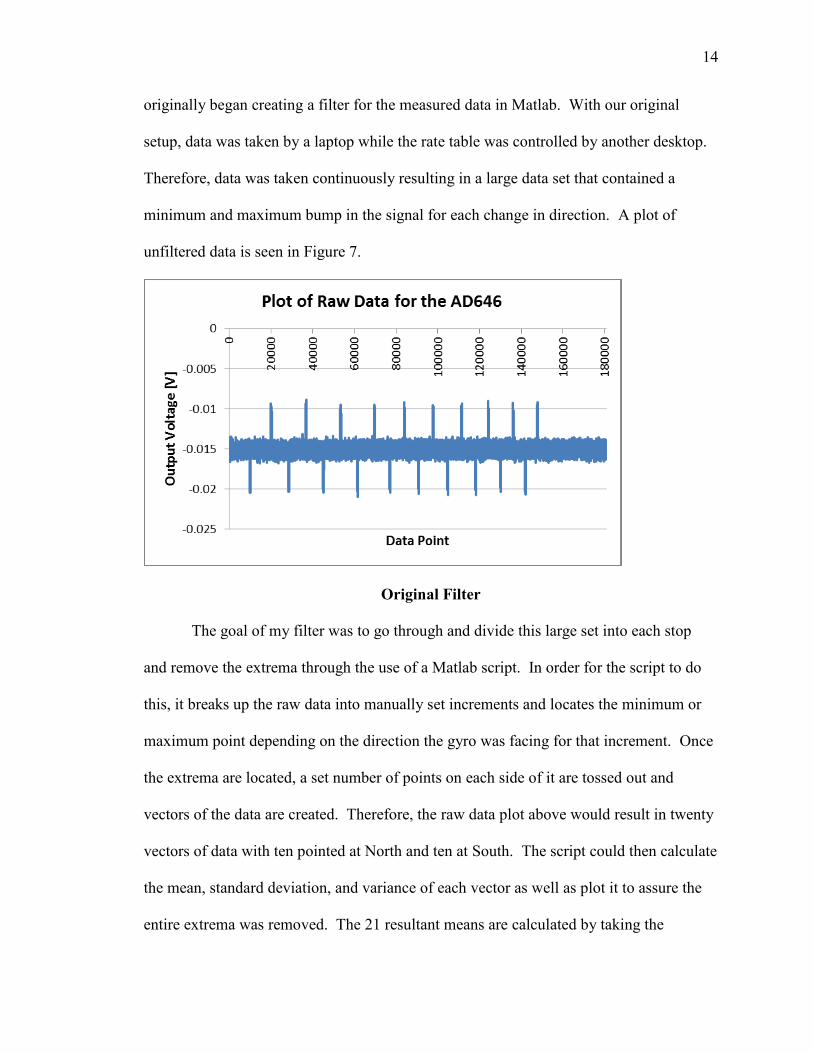
originally began creating a filter for the measured data in Matlab. With our original
setup, data was taken by a laptop while the rate table was controlled by another desktop.
Therefore, data was taken continuously resulting in a large data set that contained a
minimum and maximum bump in the signal for each change in direction. A plot of
unfiltered data is seen in Figure 7.
Original Filter
The goal of my filter was to go through and divide this large set into each stop
and remove the extrema through the use of a Matlab script. In order for the script to do
this, it breaks up the raw data into manually set increments and locates the minimum or
maximum point depending on the direction the gyro was facing for that increment. Once
the extrema are located, a set number of points on each side of it are tossed out and
vectors of the data are created. Therefore, the raw data plot above would result in twenty
vectors of data with ten pointed at North and ten at South. The script could then calculate
the mean, standard deviation, and variance of each vector as well as plot it to assure the
entire extrema was removed. The 21 resultant means are calculated by taking the

15
difference of each North mean and each of its neighbors, which are South means, and
then dividing by two. As mentioned when talking about maytagging, this is to help
reduce the offset error. This process results in twenty voltage difference values with
units of mV which can then be converted the component of the rotation rate of the earth
parallel to the Earth’s axis of rotation according to the gyro with the conversion factor of
9mV/(°/sec) to obtain 20 rotation rates. The twenty rotation rates in °/second are plotted
versus the mean of the values and the accepted value of -0.0035 degrees/second which is
the rotation rate of the earth when facing North/South for Fort Worth which is depicted in
Figure 8.
Figure 8: Plot of Rotation Rates for a run with the AD646
Rotation Rate [°/sec]
Rate Number in Data Set

16
Updated Filter
This script was eventually able to be modified once the rate table was able to be
controlled by a script in Matlab. Initially, the rate table was run on its own software
which is why two computers were needed. After the switch was made, a single computer
was able to run a script that performed all of the desired functions of spinning the rate
table, taking data, and filtering the data. The new script was also able to collect data only
while the gyroscope was stationary and create a new vector of data for each stop. The
resulting filter was able to be greatly simplified and allowed for easier collection of data.
An example of the unfiltered data for the STIM210 is seen in Figure 9 and can be
compared to the data after it has been filtered in Figure 10.
Figure 9: A plot of the X axis data (EW) for the STIM210. The multiple vectors create
the different color plots.
Rotation Rate [°/sec]
Raw Data Points

17
Swanson and Schlamminger
In addition to the nearest neighbor filter which was used, we also tried a few
others such as Swanson and Schlamminger, next nearest neighbor, next next nearest
neighbor, and a sliding average filter. The Swanson and Schlamminger is similar to the
nearest neighbor, except it places an equal weight on all vectors while ours places less
weight on the first and last vector. After a comparison between results of both filters was
made, it was determined that there was no noticeable difference in the results between the
two filters. Therefore, we decided to keep using our filter for the time being.
S & S filter = UV; with U = (data vector) and V = (
)
Figure 10: A plot of the X and Y axis data for the STIM210. The multiple vectors create the
different color plots. The circle points are for the X axis rotation rates and the star points
are for the Y axis. The red and blue lines are the accepted values for the X and Y axis
respectively. The green and black lines are the calculated values for the X and Y axis.
respectively.
Rotation Rate [°/sec]
Raw Data Points

18
Next Nearest and Next Next Nearest Neighbor
We also looked at recycling each set of data multiple times in Next Nearest
Neighbor and Next Next Nearest Neighbor. Nearest Neighbor relates three vectors of
data to each other, one North for every two South. Next Nearest Neighbor relates five
vectors to each other and Next Next Nearest neighbor relates seven. The same principle
is used for both of these; the thinking is that one can recycle data taken in the same set in
order to get more results. By reusing vectors of data, we are able to get more rotation
rates within one data set. However, these added rotation rates did not translate to better
results. Thus, the current Nearest Neighbor filter was kept once again.
Sliding Average
The sliding average filter was mainly used to look at the effect that temperature
had on the rotation rates. This script was the only one that was applied to the STIM210.
The sliding average works in such a way that it smoothes the data by making it more
linear. This data was graphically compared with temperature in another script called
moving average as seen in Figure 11. As seen, there appears to be no significant
correlation between the rotation rate data and temperature data for the STIM210.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 106
0
5
10
15
20
25
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 106
-5
0
5
10
15
20x 10
-3
Figure 11: Plot of
Filtered
temperature and
rotation rate data
for STIM210.
Temperature is
blue and rotation
rate is green.
Temperature [°C] Rotation Rate [°/sec]
Raw Data Points
19
CONCLUSIONS
Repeatability
After numerous testing and observations have been completed, a number of
conclusions began to form for each of the gyroscopes. The most important conclusion is
that the repeatability of the gyroscopes needs to be improved. This is especially true for
the AD646. Although we were greatly improving the bias drift from the 12°/hr through
filtering to usually less than 5° for a data set, the results were not consistent. It was
determined that the signal to noise ratio for the AD646 is near 1:1. In order to get more
repeatable results, the ratio needs to greatly increase. This can be attempted by either
increasing the signal or reducing the noise. The fact that we were getting fairly accurate
results shows that we were improving upon this ratio, but it needs to be better in order to
gain consistency.
Ergodicity
The other major conclusion for the AD646 is determining that it exhibits a quality
known as ergodicity. Ergodicity means that the time average of a sensor is equal to the
ensemble average of several sensors averaged over proportionally shorter times. This
means that the gyro exhibits behavior that shows that each calculated rotation rate is
independent of the others. We were able to quantify this by collecting long data sets with
900 cycles and 1799 estimates of the rotation rate. When taking the Allan Deviation of
this set which is depicted in Figure 12, the resultant plot showed that the deviation was
inversely proportional to the square root of the number of estimates. Thus, the longer the
data set, or more calculated rotation rates a set has, the more accurate the results.
However, due to the nature of the task the gyro will be performing downhole, the time
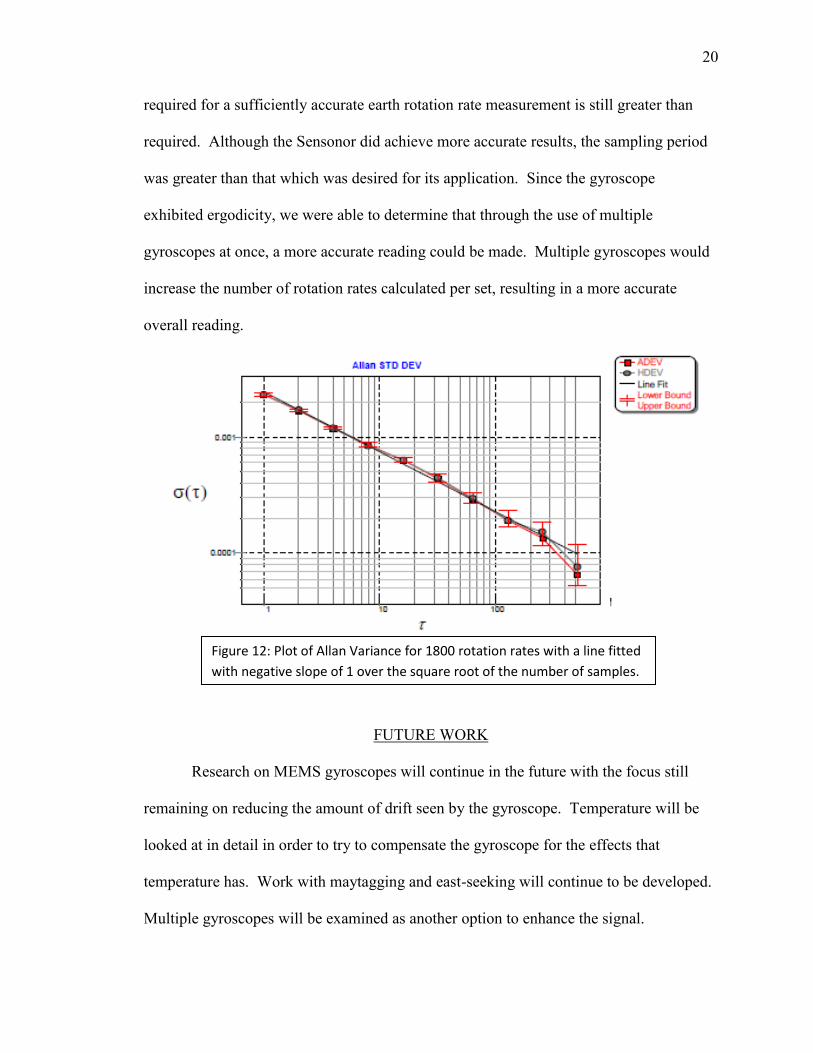
20
required for a sufficiently accurate earth rotation rate measurement is still greater than
required. Although the Sensonor did achieve more accurate results, the sampling period
was greater than that which was desired for its application. Since the gyroscope
exhibited ergodicity, we were able to determine that through the use of multiple
gyroscopes at once, a more accurate reading could be made. Multiple gyroscopes would
increase the number of rotation rates calculated per set, resulting in a more accurate
overall reading.
FUTURE WORK
Research on MEMS gyroscopes will continue in the future with the focus still
remaining on reducing the amount of drift seen by the gyroscope. Temperature will be
looked at in detail in order to try to compensate the gyroscope for the effects that
temperature has. Work with maytagging and east-seeking will continue to be developed.
Multiple gyroscopes will be examined as another option to enhance the signal.
Figure 12: Plot of Allan Variance for 1800 rotation rates with a line fitted
with negative slope of 1 over the square root of the number of samples.
21
REFERENCES
"ALAMATH." ALAMATH. Web. http://www.alamath.com/
Analog Devices. ADXRS646 Data Sheet. Web. http://www.analog.com/static/imported-
files/data_sheets/ADXRS646.pdf
Looney, Mark. "A Simple Calibration for MEMS Gyroscopes." EDN Europe July 2010:
28-31. Web. http://www.analog.com/static/imported-
files/tech_articles/GyroCalibration_EDN_EU_7_2010.pdf
Prikhodko, Igor P., Sergei A. Zotov, Alexander A. Trusov, and Andrei M. Shkel. "What
Is MEMS Gyrocompassing? Comparative Analysis of Maytagging and
Carouseling." Journal of Microelectromechanical Systems . Web.
http://mems.eng.uci.edu/files/2014/03/jmems-prikhodko-zotov-trusov-shkel-
2013.pdf
Sensonor. Sensonor STIM210 Multi-Axis Gyro Module Datasheet. Web.
http://www.sensonor.com/media/94204/ts1545.r14%20datasheet%20stim210.pdf
Sensonor. "STIM210." Sensonor AS. Web. http://www.sensonor.com/gyro-
products/gyro-modules/stim210.aspx
Sensonor. Ultra-High Performance Gyro Module STIM210 Product Brief. Web.
http://www.sensonor.com/media/72680/2013-07-30-product-brief-stim210-a4-
web.pdf