an introduction to control theory with applications to computer science joseph hellerstein and sujay...
TRANSCRIPT

An Introduction to Control Theory
With Applications to Computer Science
Joseph HellersteinAnd
Sujay ParekhIBM T.J. Watson Research
Center{hellers,sujay}@us.ibm.com

2
Example 1: Liquid Level System
H
Input valve control
float
Output valve
Goal: Design the input valve control to maintain a constant height regardless of the setting of the output valve
iq
oqV
(height)
(input flow)
(output flow)
(volume)
R(resistance)

3
Example 2: Admission Control
Users
Administrator
Controller
RPCs
Sensor
Server
Referencevalue
QueueLength
Tuningcontrol
ServerLog
Goal: Design the controller to maintain a constant queue length regardless of the workload

4
Why Control Theory Systematic approach to analysis and design
Transient response Consider sampling times, control frequency Taxonomy of basic controls Select controller based on desired characteristics
Predict system response to some input Speed of response (e.g., adjust to workload
changes) Oscillations (variability)
Approaches to assessing stability and limit cycles
5
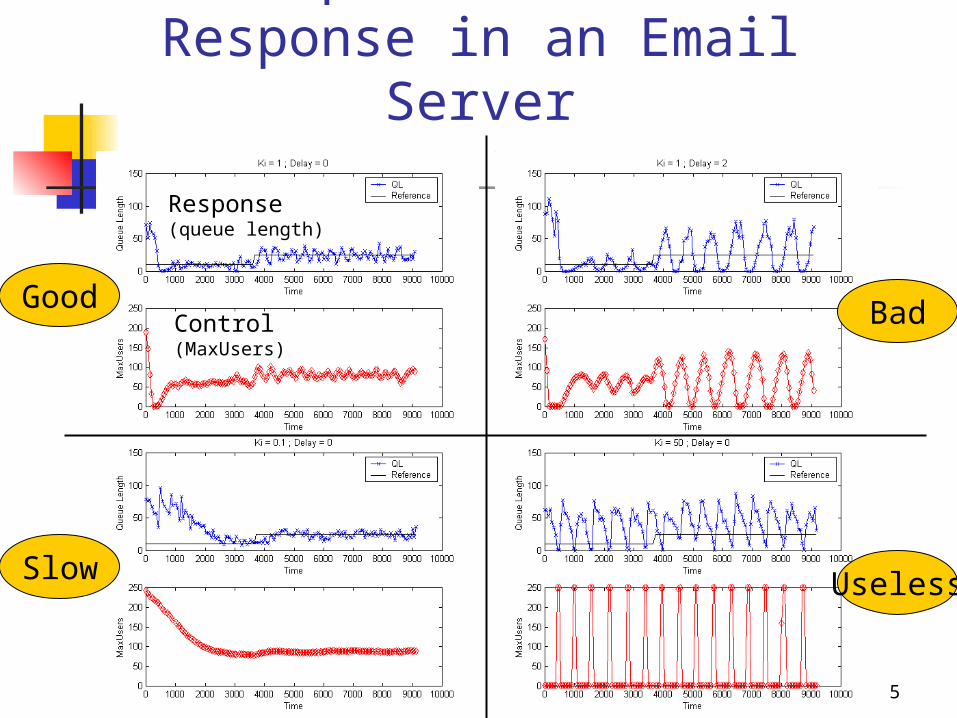
Example: Control & Response in an Email Server
Control(MaxUsers)
Response(queue length)
Good
Slow
Bad
Useless

6
Examples of CT in CS Network flow controllers (TCP/IP – RED)
C. Hollot et al. (U.Mass) Lotus Notes admission control
S. Parekh et al. (IBM) QoS in Caching
Y. Lu et al. (U.Va) Apache QoS differentiation
C. Lu et al. (U.Va)
7
Outline Examples and Motivation Control Theory Vocabulary and
Methodology Modeling Dynamic Systems Standard Control Actions Transient Behavior Analysis Advanced Topics Issues for Computer Systems Bibliography

8
Feedback Control System
PlantController)(tu
)(tnDisturbanc
e
)(ty)(tr
)(te
Transducer
)(tb
)()()( tbtrte +
–
Reference Value

9
Controller Design Methodology
Block diagram
construction
Model
Ok?
Stop
Start
Transfer function formulation and
validation
Controller Design
Objective
achieved?
Controller Evaluation
Y
Y
N N
System Modeling
10
Control System Goals Regulation
thermostat, target service levels Tracking
robot movement, adjust TCP window to network bandwidth
Optimization best mix of chemicals, minimize
response times

11
System Models Linear vs. non-linear (differential
eqns) eg, Principle of superposition
Deterministic vs. Stochastic Time-invariant vs. Time-varying
Are coefficients functions of time? Continuous-time vs. Discrete-time
t R vs k Z
xbxbyaya 0201

12
Approaches to System Modeling First Principles
Based on known laws Physics, Queueing theory
Difficult to do for complex systems Experimental (System ID)
Statistical/data-driven models Requires data Is there a good “training set”?

13
The Complex Plane (review)
Imaginary axis (j)
Real axis
jyxu
x
y
r
r
jyxu (complex) conjugate
y
22
1
||||
tan
yxuru
x
yu

14
Basic Tool For Continuous Time: Laplace Transform
Convert time-domain functions and operations into frequency-domain f(t) F(s) (t, s Linear differential equations (LDE) algebraic
expression in Complex plane Graphical solution for key LDE characteristics Discrete systems use the analogous z-
transform
0)()()]([ dtetfsFtf stL

15
Laplace Transforms of Common FunctionsName f(t) F(s)
Impulse
Step
Ramp
Exponential
Sine
1
s
1
2
1
s
as 1
22
1
s
1)( tf
ttf )(
atetf )(
)sin()( ttf
00
01)(
t
ttf

16
Laplace Transform Properties
)(lim)(lim
)(lim)0(
)()()
)(1)(
)(
)0()()(
)()()]()([
0
0
2121
0
2121
ssFtf-
ssFf-
sFsFdτ(ττ)f(tf
dttfss
sFdttfL
fssFtfdt
dL
sbFsaFtbftafL
st
s
t
t
theorem valueFinal
theorem valueInitial
nConvolutio
nIntegratio
ationDifferenti
calingAddition/S

17
Insights from Laplace Transforms What the Laplace Transform says about
f(t) Value of f(0)
Initial value theorem Does f(t) converge to a finite value?
Poles of F(s) Does f(t) oscillate?
Poles of F(s) Value of f(t) at steady state (if it converges)
Limiting value of F(s) as s->0

18
Transfer Function Definition
H(s) = Y(s) / X(s) Relates the output of a linear
system (or component) to its input Describes how a linear system
responds to an impulse All linear operations allowed
Scaling, addition, multiplication
H(s)X(s) Y(s)

19
Block Diagrams Pictorially expresses flows and
relationships between elements in system
Blocks may recursively be systems Rules
Cascaded (non-loading) elements: convolution
Summation and difference elements Can simplify

20
Block Diagram of System
PlantController)(sU
)(sN
Disturbance
)(sY
)(sR)(sE
Transducer
)(sB
+
–
)(1 sG )(2 sG
)(sH
Reference Value

21
Combining Blocks
Combined Block)(sY
)(sR)(sE
Transducer
)(sB
+
–
)(sH
)())()(( 21 sGsNsG
Reference Value

22
Block Diagram of Access Control
M(z)
G(z) N(z) S(z)
Controller Notes Server
Sensor
R(z)+
E(z)U(z)
-
Q(z)
Users
Controller
Sensor
ServerServerLog

23
Key Transfer Functions
)()()(
)(
)(
)(
)(
)(21 sGsG
sE
sU
sU
sY
sE
sY :eedforwardF
)()()()(
)(21 sHsGsG
sE
sB :Loop-penO
)()()(1
)()(
)(
)( :
21
21
sHsGsG
sGsG
sR
sY
Feedback
PlantController)(sU
)(sY
)(sR)(sE
Transducer)(sB
+
–
)(1 sG )(2 sG
)(sH
Reference

24
Rational Laplace Transforms
m
sFsAs
sFsBs
bsbsbsB
asasasA
sB
sAsF
mm
nn
poles # system ofOrder
complex are zeroes and Poles
(So, :Zeroes
(So, :Poles
)0*)(0*)(*
)*)(0*)(*
...)(
...)(
)(
)()(
01
01

25
First Order System
Reference
)(sY)(sR
)(sE
1)(sB
)(sUsT1
1K
sT
K
sTK
K
sR
sY
11)(
)(

26
First Order System
Impulse response
Exponential
Step response
Step, exponential
Ramp response
Ramp, step, exponential
1 sT
K
/1
2 Ts
KT-
s
KT-
s
K
/1
Ts
K-
s
K
No oscillations (as seen by poles)

27
Second Order System
:frequency natural Undamped
where :ratio Damping
(ie,part imaginary zero-non have poles if Oscillates
:response Impulse
J
K
JKBB
B
JKB
ssKBsJs
K
sR
sY
N
cc
NN
N
2
)04
2)(
)(
2
22
2
2
28
Second Order System: Parameters
noscillatio the offrequency the gives
frequency natural undamped of tionInterpreta
0)Im0,(Re Overdamped 1
Im) (Re dUnderdampe
0)Im 0,(Re noscillatio Undamped
ratio damping of tionInterpreta
N
:
0:10
:0

29
Transient Response Characteristics
statesteady of % specified within stays time Settling :
reached is valuepeak whichat Time :
valuestatesteady reachfirst untildelay time Rise :
valuestatesteady of 50% reach untilDelay :
s
p
r
d
t
t
t
t
0.5 1 1.5 2 2.5 3
0.25
0.5
0.75
1
1.25
1.5
1.75
2
rt
overshoot maximumpM
pt stdt

30
Transient Response Estimates the shape of the curve
based on the foregoing points on the x and y axis
Typically applied to the following inputs Impulse Step Ramp Quadratic (Parabola)

31
Effect of pole locations
Faster Decay Faster Blowup
Oscillations(higher-freq)
Im(s)
Re(s)(e-at) (eat)

32
Basic Control Actions: u(t)
:control alDifferenti
:control Integral
:control alProportion
sKsE
sUte
dt
dKtu
s
K
sE
sUdtteKtu
KsE
sUteKtu
dd
it
i
pp
)(
)()()(
)(
)()()(
)(
)()()(
0

33
Effect of Control Actions Proportional Action
Adjustable gain (amplifier) Integral Action
Eliminates bias (steady-state error) Can cause oscillations
Derivative Action (“rate control”) Effective in transient periods Provides faster response (higher sensitivity) Never used alone
34
Basic Controllers Proportional control is often used
by itself Integral and differential control are
typically used in combination with at least proportional control eg, Proportional Integral (PI)
controller:
sTK
s
KK
sE
sUsG
ip
Ip
11
)(
)()(

35
Summary of Basic Control Proportional control
Multiply e(t) by a constant PI control
Multiply e(t) and its integral by separate constants Avoids bias for step
PD control Multiply e(t) and its derivative by separate constants Adjust more rapidly to changes
PID control Multiply e(t), its derivative and its integral by
separate constants Reduce bias and react quickly

36
Root-locus Analysis Based on characteristic eqn of closed-loop
transfer function Plot location of roots of this eqn
Same as poles of closed-loop transfer function Parameter (gain) varied from 0 to
Multiple parameters are ok Vary one-by-one Plot a root “contour” (usually for 2-3 params)
Quickly get approximate results Range of parameters that gives desired
response
37
Digital/Discrete Control More useful for computer systems Time is discrete
denoted k instead of t Main tool is z-transform
f(k) F(z) , where z is complex Analogous to Laplace transform for s-domain
Root-locus analysis has similar flavor Insights are slightly different
0
)()()]([k
kzkfzFkfZ

38
z-Transforms of Common FunctionsName f(t) F(z)
Impulse
Step
Ramp
Exponential
Sine
1
1z
z
2)1( z
z
aez
z
1)(Cos2
Sin2 zaz
az
1)( tf
ttf )(
atetf )(
)sin()( ttf
F(s)
1
s
1
2
1
s
as 1
22
1
s
00
01)(
t
ttf

39
Root Locus analysis of Discrete Systems Stability boundary: |z|=1 (Unit circle) Settling time = distance from
Origin Speed = location relative to Im
axis Right half = slower Left half = faster

40
Effect of discrete poles
|z|=1
Longer settling time
Re(s)
Im(s)
Unstable
Stable
Higher-frequencyresponse
Tsez :Intuition

41
System ID for Admission Control
M(z)
G(z) N(z) S(z)
Controller Notes Server
Sensor
R(z)+
E(z)U(z)
-
Q(z)
ARMA Models
Control Law
Transfer Functions
zz
zK
cz
dzd
az
zbzGzSzN i 1
1)()()(
1
10
1
0
Open-Loop:
zz
zKzG
cz
dzdzS
az
zbzN
i 1
1)(
)(
)(
1
10
1
0
)()1()(
)1()()1()(
)()1()(
101
01
teKtutu
tqdtqdtmctm
tubtqatq
i

42
Root Locus Analysis of Admission Control
Predictions:•Ki small => No controller-induced oscillations•Ki large => Some oscillations•Ki v. large => unstable system (d=2)•Usable range of Ki for d=2 is small

43
Experimental Results
Control(MaxUsers)
Response(queue length)
Good
Slow
Bad
Useless

44
Advanced Control Topics Robust Control
Can the system tolerate noise? Adaptive Control
Controller changes over time (adapts) MIMO Control
Multiple inputs and/or outputs Stochastic Control
Controller minimizes variance Optimal Control
Controller minimizes a cost function of error and control energy
Nonlinear systems Neuro-fuzzy control Challenging to derive analytic results

45
Issues for Computer Science Most systems are non-linear
But linear approximations may do eg, fluid approximations
First-principles modeling is difficult Use empirical techniques
Control objectives are different Optimization rather than regulation
Multiple Controls State-space techniques Advanced non-linear techniques (eg, NNs)

46
Selected Bibliography Control Theory Basics
G. Franklin, J. Powell and A. Emami-Naeini. “Feedback Control of Dynamic Systems, 3rd ed”. Addison-Wesley, 1994.
K. Ogata. “Modern Control Engineering, 3rd ed”. Prentice-Hall, 1997. K. Ogata. “Discrete-Time Control Systems, 2nd ed”. Prentice-Hall, 1995.
Applications in Computer Science C. Hollot et al. “Control-Theoretic Analysis of RED”. IEEE Infocom 2001 (to appear). C. Lu, et al. “A Feedback Control Approach for Guaranteeing Relative Delays in Web
Servers”. IEEE Real-Time Technology and Applications Symposium, June 2001. S. Parekh et al. “Using Control Theory to Achieve Service-level Objectives in
Performance Management”. Int’l Symposium on Integrated Network Management, May 2001
Y. Lu et al. “Differentiated Caching Services: A Control-Theoretic Approach”. Int’l Conf on Distributed Computing Systems, Apr 2001
S. Mascolo. “Classical Control Theory for Congestion Avoidance in High-speed Internet”. Proc. 38th Conference on Decision & Control, Dec 1999
S. Keshav. “A Control-Theoretic Approach to Flow Control”. Proc. ACM SIGCOMM, Sep 1991
D. Chiu and R. Jain. “Analysis of the Increase and Decrease Algorithms for Congestion Avoidance in Computer Networks”. Computer Networks and ISDN Systems, 17(1), Jun 1989