alignment introduction notes courtesy of funk et al., siggraph 2004
TRANSCRIPT

Alignment
Introduction
Notes courtesy of Funk et al., SIGGRAPH 2004

Outline:• Challenge
• General Approaches
• Specific Examples
Alignment
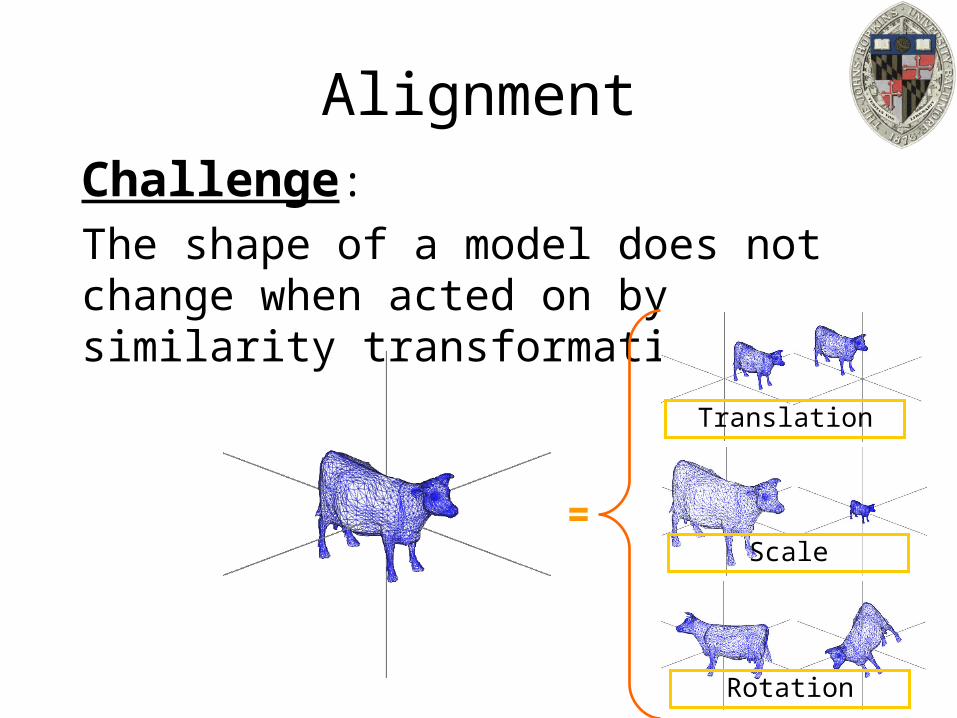
Challenge:
The shape of a model does not change when acted on by similarity transformations:
=Scale
Rotation
Translation

AlignmentChallenge:However, the shape descriptors can change if a the model is:
– Translated
– Scaled
– Rotated
How do we match shape descriptors across transformations that do not change the shape of a model?

Outline:• Challenge
• General Approaches
• Specific Examples
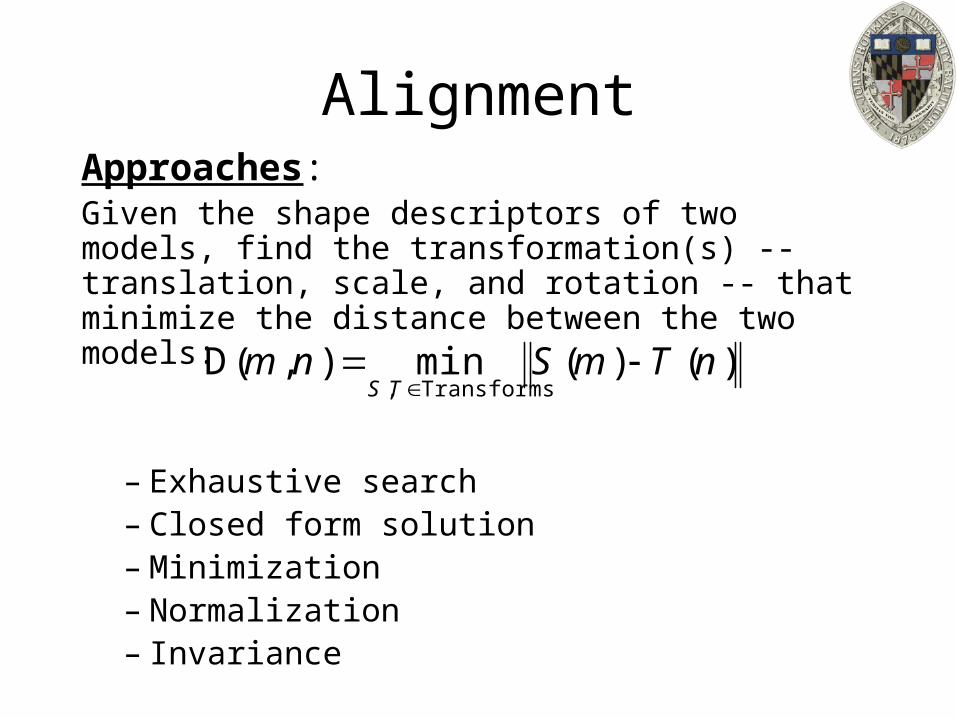
AlignmentApproaches:Given the shape descriptors of two models, find the transformation(s) -- translation, scale, and rotation -- that minimize the distance between the two models:
– Exhaustive search– Closed form solution– Minimization – Normalization– Invariance
)()(min),(DTransforms,
nTmSnmTS

AlignmentAside:Because translations and rotations preserve distances, applying such a transformation to one model is equivalent to applying the inverse transformation to the other one:
)()( 1 nSmnmS
=

AlignmentAside:For translations and rotations we can simplify the alignment equation:
)()(min),(DTransforms,
nTmSnmTS
)(min),(DTransforms
nTmnmT

Exhaustive SearchApproach:
1. Compare the descriptors at all possible transformations.
2. Find the transformation at which the distance is minimal.
3. Define the model similarity as the value at the minimum.

Exhaustive SearchApproach:
1. Compare the descriptors at all possible transformations.
2. Find the transformation at which the distance is minimal.
3. Define the model similarity as the value at the minimum.
Exhaustive search for optimal rotation

Exhaustive SearchApproach:
1. Compare the descriptors at all possible transformations.
2. Find the transformation at which the distance is minimal.
3. Define the model similarity as the value at the minimum.

Exhaustive Search
Properties:
Always gives the correct answer Needs to be performed at run-time and can be
very slow to compute:Computes the measure of similarity for every transform. We only need the value at the best one.

Closed Form SolutionApproach:
Explicitly find the transformation(s) that solves the equation:
Properties:
Always gives the correct answer Only compute the measure of similarity for the best
transformation. A closed form solution does not always exist. Often needs to be computed at run-time.
)()(min),(DTransforms,
nTmSnmTS

MinimizationApproach:• Coarsely align the models using low frequency information.• Progressively refine the alignment by comparing higher
frequency components and adjusting the alignment.• Converge to the (locally) optimal alignment.Example: Light field descriptors
Spherical Extent Function

MinimizationApproach:• Coarsely align the models using low frequency information.• Progressively refine the alignment by comparing higher
frequency components and adjusting the alignment.• Converge to the (locally) optimal alignment.
Initial Models Low Frequency Aligned Models
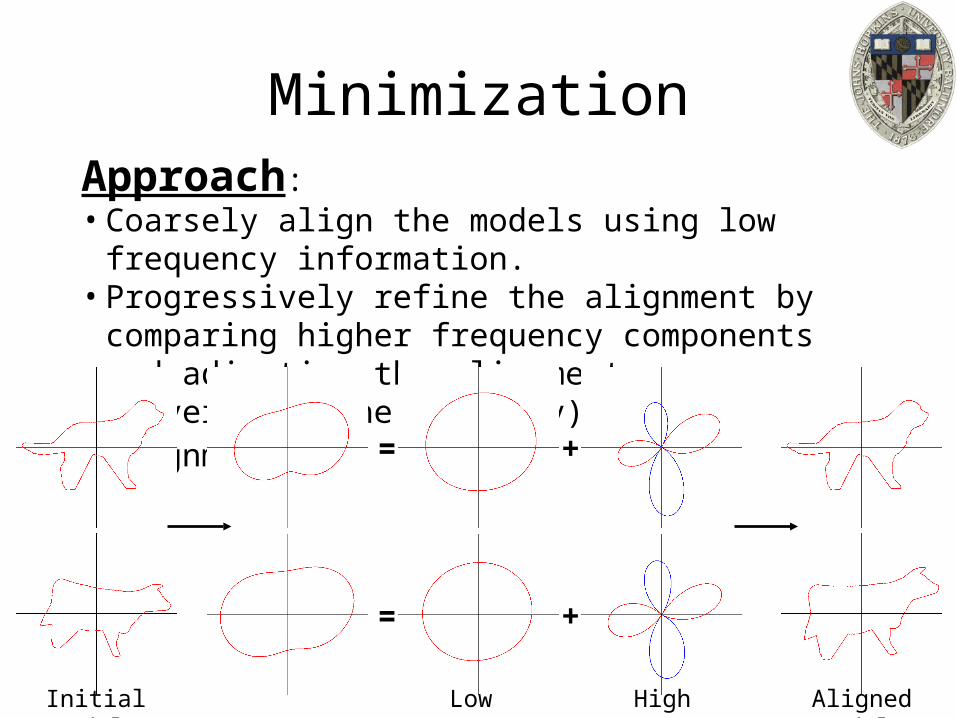
MinimizationApproach:• Coarsely align the models using low frequency information.• Progressively refine the alignment by comparing higher
frequency components and adjusting the alignment.• Converge to the (locally) optimal alignment.
=
= +
+
Initial Models Low Frequency Aligned ModelsHigh Frequency

Minimization
Properties:
Can be applied to any type of transformation Needs to be computed at run-time. Difficult to do robustly:
Given the low frequency alignment and the computed high-frequency alignment, how do you combine the two?
Considerations can include:• Relative size of high and low frequency info
• Distribution of info across the low frequencies
• Speed of oscillation

NormalizationApproach:
Place every model into a canonical coordinate frame and assume that two models are optimally aligned when each is in its own canonical frame.
Example: COM, Max Radius, PCA
Scale
Rotation
Translation

Normalization
Properties: Can be computed in a pre-processing stage. For some transformations this is guaranteed to give
the optimal alignment. For other transformations the approach is only a
heuristic and may fail.
Failure of PCA-normalization in aligning rotations

InvarianceApproach:
Represent every model by a descriptor that is unchanged when the model is transformed by discarding information that is transformation dependent.
Scale
Rotation
Translation
Transformation-invariant descriptor

InvarianceReview:
Is there a general method for addressing these basic types of transformations?
Descriptor Translation Scale RotationShape Distributions (D2) + - +Extended Gaussian Images + - -Shape Histograms (Shells) - - +Shape Histograms (Sectors) - + -Spherical Parameterizations + - -

Invariance
Properties: Can be computed in a pre-processing stage. Works for translation, scale and rotation. Gives a more compact representation.Tends to discard valuable, discriminating, information.
0%
50%
100%
0% 50% 100%
Recall
Precision
GEDT (3D)
Harmonic (2D)
D2 (1D)
Shells (1D)
…….....No Invariance……..……Rotation
…Translation + Rotation………….…..Rotation

Outline:• Challenge
• General Approaches
• Specific Examples– Normalization: PCA– Closed Form Solution: Ordered Point Sets

PCA Alignment
Treat a surface as a collection of points and define the variance function:
Sp
dpvpvSVar2
,),(

PCA Alignment
Define the covariance matrix M:
Find the eigen-values and align so that the eigen-values map to the x-, y-, and z-axes
Sp
jiij dpppM

PCA Alignment
Limitations:– Eigen-values are only defined up to sign!
PCA alignment is only well-defined up to axial flips about the x-, y-, and z-axes.

PCA Alignment
Limitations:–Assumes that the eigen-values are distinct and therefore the eigen-vectors are well-defined (up to sign).
This is not always true and can make PCA alignment unstable.

Outline:• Challenge
• General Approaches
• Specific Examples– Normalization: PCA– Closed Form Solution: Ordered Point Sets

Ordered Point Sets
Challenge:
Given ordered point sets P={p1,…,pn}, Q={q1,…,qn}, find the rotation/reflection R minimizing the sum of squared differences:
n
iii qRpQPD
1
2)(),(
p1p2
p3
p4p5
p6
q1
q2
q3
q4
q5
q6
R(q2)R(q1)R(q3)
R(q4)R(q5)
R(q6)
q1
q2
q3
q4
q5
q6
RR

Review
Vector dot-product:
If v =(v1,…,vn) and w=(w1,…,wn) are two n-dimensional vectors the dot-product of v with w is the sum of the product of the coefficients:
n
iiiwvv,w
1

Review
Trace:
The trace of a nxn matrix M is the sum of the diagonal entries of M:
Properties:–
–
n
iiiMM
1,Trace
)(NMMN TraceTrace )( tMM TraceTrace

Review
Trace:
If M is any nxn matrix and D is a diagonal nxn matrix, then the trace of MD is the sum of the products of the diagonal entries.
nnnnnnnn
nnnnnnnn
nnnn
nnnn
n
n
nnnnnn
nnnnnn
nn
nn
mmmm
mmmm
mmmm
mmmm
mmmm
mmmm
mmmm
mmmm
,1,11,21,1
,11,112,121,11
,21,212,221,21
,11,112,121,11
1
2
1
,1,1,1,
,11,12,11,1
,21,22,21,2
,11,12,11,1
000
000
000
000
nnnnnn mmmmMD ,1,112,221,11)( Trace
M D

Review
Matrix multiplication:
If M and N are two then the (i,j)th entry of the matrix MN is the dot-product of the jth row vector of M with the ith column vector of N.
MN
jth row ith column
MN
(i,j)th entry

Review
Matrix dot-product:
If M and N are two mxn matrices then the ith diagonal entry of the matrix MtN is the dot-product of the ith column vector of M with the ith column vector of N.
Mt
N
ith row ith column
mn
nm
MtN
ith diagonal entry

Review
Matrix dot-product:
We define the dot-product of two mxn matrices, M and N, to be the trace of the matrix product:
(the sum of the dot-products of the column vectors).
NMM,N tTrace

Review
SVD Factorization:If M is an mxm matrix, then M can be factored as the product:
where D is a diagonal mxm matrix with non-negative entries and U and V are orthonormal (i.e. rotation/reflection) mxm matrices.
tUDVM

Trace Maximization
Claim:
If M is an mxm matrices, whose SVD factorization is:
then the orthonormal transformation R=VUt is the orthonormal transformation maximizing the trace:
tUDVM
RMTrace

Trace Maximization
Proof:
We can rewrite the trace equation as:
If we set R0 to be the rotation R0=VtRU, we get:
RUDV
RUDVRMt
t
Trace
TraceTrace
DRRM 0TraceTrace

Trace Maximization
Proof:
Since R0 is a rotation, each of its entries can have value no larger than one.
Since D is diagonal, the value of the trace is the product of the diagonal elements of D and R0.
DRRM 0TraceTrace
Trace Maximization
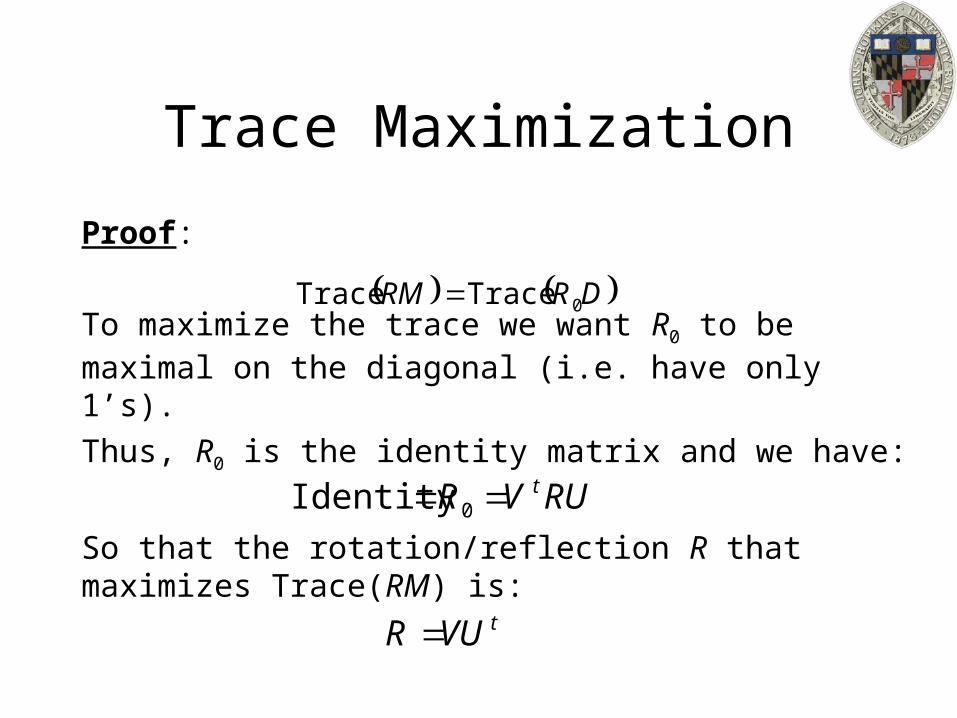
Proof:
To maximize the trace we want R0 to be maximal on the diagonal (i.e. have only 1’s).
Thus, R0 is the identity matrix and we have:
So that the rotation/reflection R that maximizes Trace(RM) is:
DRRM 0TraceTrace
RUVR t 0Identity
tVUR

Ordered Point Sets
Challenge:
Given ordered point sets P={p1,…,pn}, Q={q1,…,qn}, find the rotation/reflection R minimizing the sum of squared differences:
n
iii qRpQPD
1
2)(),(

Ordered Point Sets
Solution:
Use the fact that we can express the difference:
to rewrite the equation as:
wvwvwv ,2222
n
iiiii
n
iii
qRpqRp
qRpQPD
1
22
1
2
)(,2)(
)(),(
n
iii qRpQPD
1
2)(),(
Ordered Point Sets
Solution:
Use the fact that rotations preserves lengths:
to rewrite the equation as:
22)( vvR
n
iiiii
n
iiiii
qRpqp
qRpqRpQPD
1
22
1
22
)(,2
)(,2)(),(
n
iiiii qRpqRpQPD
1
22)(,2)(),(

Ordered Point Sets
Solution:
Since the value:
Does not depend on the choice of rotation R, minimizing the sum of squared distances is equivalent to maximizing the sum of dot-products:
n
iii qp
1
22
n
iii qRp
1
)(,
n
iiiii qRpqpQPD
1
22)(,2),(

Ordered Point Sets
Solution:
If we let MP (respectively MQ) be the 3xn matrix whose columns are the points pi (respectively qi) then we can rewrite the sum of the vector dot-products as the matrix dot product:
and we can find the maximizing rotation/reflection R by trace maximization.
tPQ
Qt
P
QP
n
iii
MRM
RMM
RMMqRp
Trace
Trace
,)(,1
n
iii
RqRp
1
)(,maxRotations