algorithms behind global positioning
DESCRIPTION
Algorithms behind Global Positioning. Murray Grace Josh Collins . Agenda. Global Positioning systems Overview How GPS works Determining position Errors & Error correction Algorithms Routing Other methods of positioning Cell Phone Towers & Wi Fi Features of GPS Location Elevation - PowerPoint PPT PresentationTRANSCRIPT
Algorithms behind Global Positioning
Murray GraceJosh Collins

Agenda
Global Positioning systems Overview How GPS works Determining position Errors & Error correction Algorithms Routing
Other methods of positioning Cell Phone Towers & Wi Fi
Features of GPS Location Elevation Velocity

What is GPS ? GPS is a space based satellite navigation system that provides
location and time information anywhere, anytime and in all weather conditions
1960’s 1970’s & 1980’s 1990’s & 2000’s
First satellite navigation system Transit using 5 satellites tested by U.S. Navy
Timation satellite developed to place accurate clocks in space
Navigation System Using Timing and Ranging or Navstar – GPS program launched
GPS was realized by the U.S. Department of Defense and run with 24 satellites
Icons behind GPS invention
Roger L. EastonIvan A. Getting Bradford Parkinson

GPS Segments
Space segment
A constellation of 24 Satellites that transmits signals that gives the current GPS position & time
Control segment
User segment
Worldwide control stations to maintain satellite in orbit & adjust satellite clocks
GPS receivers which receive signals from satellite to calculate users position & time
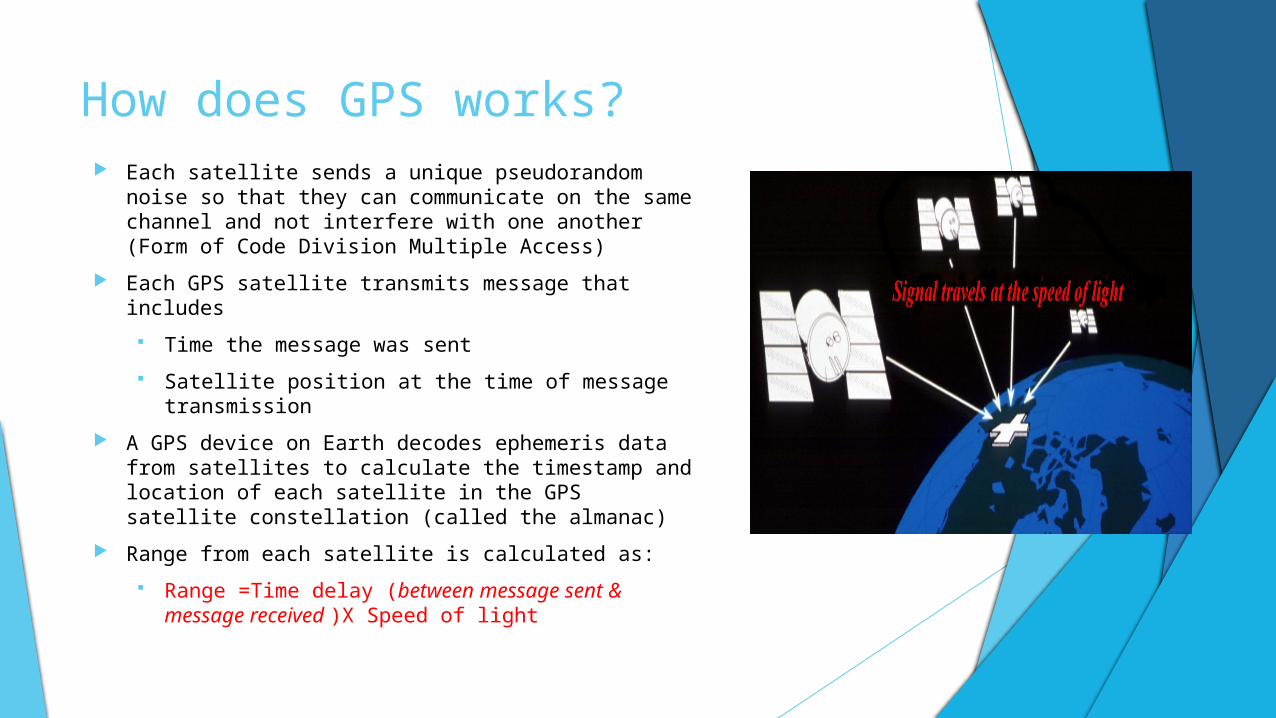
How does GPS works? Each satellite sends a unique pseudorandom noise
so that they can communicate on the same channel and not interfere with one another (Form of Code Division Multiple Access)
Each GPS satellite transmits message that includes Time the message was sent Satellite position at the time of message
transmission A GPS device on Earth decodes ephemeris data
from satellites to calculate the timestamp and location of each satellite in the GPS satellite constellation (called the almanac)
Range from each satellite is calculated as: Range =Time delay (between message sent &
message received )X Speed of light

Pseudorandom noise & Satellites
Pseudorandom noise is a signal similar to noise ,it lacks any definite pattern but consists of a sequence of pulse which repeats itself after a specific period
Modulated with data sent from Satellite Each GPS satellite has a unique Pseudorandom Noise it generates to
distinguish itself from other GPS satellites Data received by GPS receiver is sent to the nearest base station to
be decoded
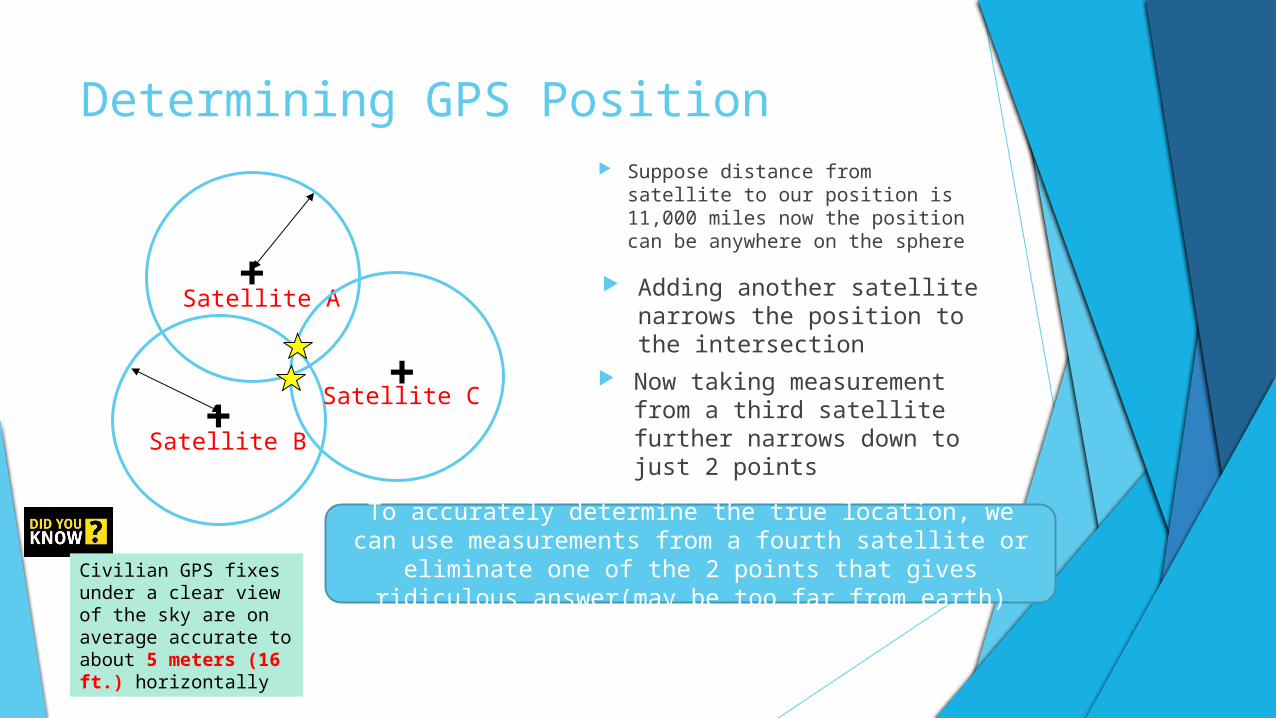
Determining GPS Position Suppose distance from satellite
to our position is 11,000 miles now the position can be anywhere on the sphere
Satellite A+
Satellite B+ Satellite C+
Adding another satellite narrows the position to the intersection
Now taking measurement from a third satellite further narrows down to just 2 points
To accurately determine the true location, we can use measurements from a fourth satellite or eliminate one of the 2 points that gives ridiculous answer(may be too far
from earth)Civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft.) horizontally

Calculating Location The GPS device uses the distance between itself and at least 3 other
satellites along with the distance between each satellite to form a triangle in space

It’s a Game of Error Correction
Accurate timing is the key to measuring distance to satellites Many factors, such as ionosphere effects, clock errors
(unsynchronized with user device clock), multipath distortion, etc. can cause an error in the timing of the signal
Clock errors are handle with very accurate atomic clocks Everything else is taken care of with Differential Positioning
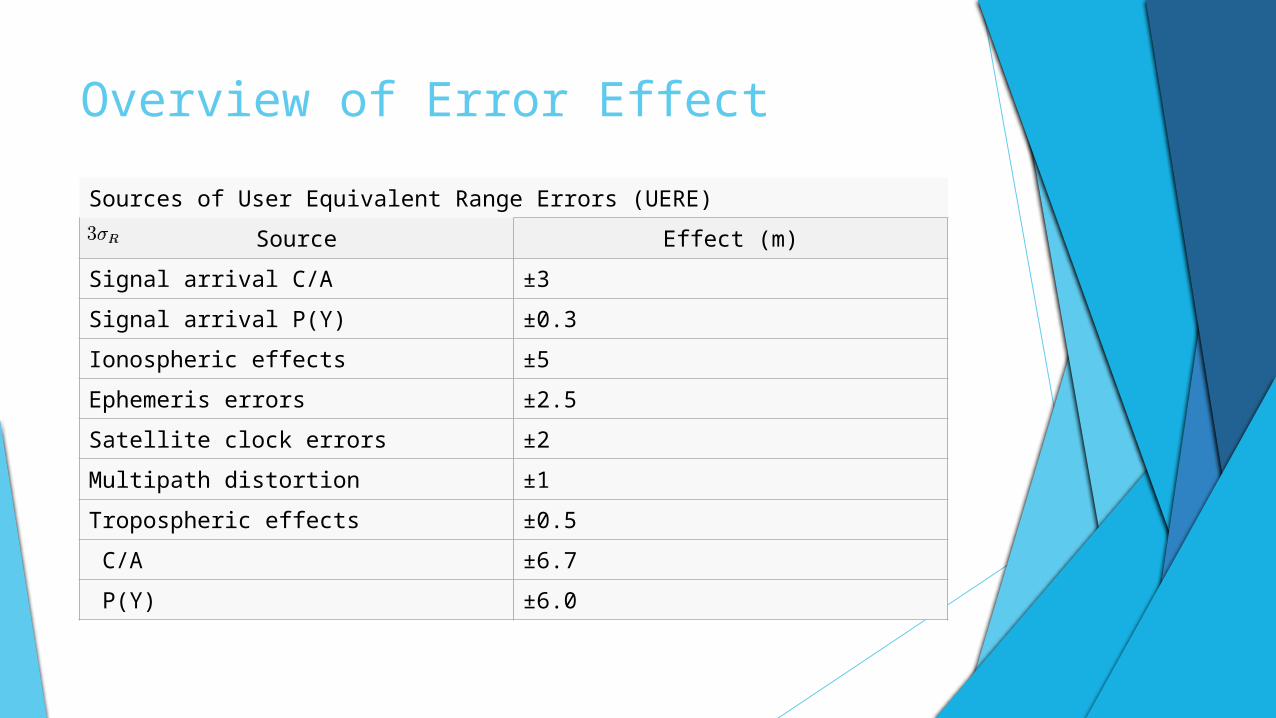
Overview of Error EffectSources of User Equivalent Range Errors (UERE)
Source Effect (m)Signal arrival C/A ±3Signal arrival P(Y) ±0.3Ionospheric effects ±5Ephemeris errors ±2.5Satellite clock errors ±2Multipath distortion ±1Tropospheric effects ±0.5 C/A ±6.7 P(Y) ±6.0

Error correction–Differential Positioning Uses a Reference receiver
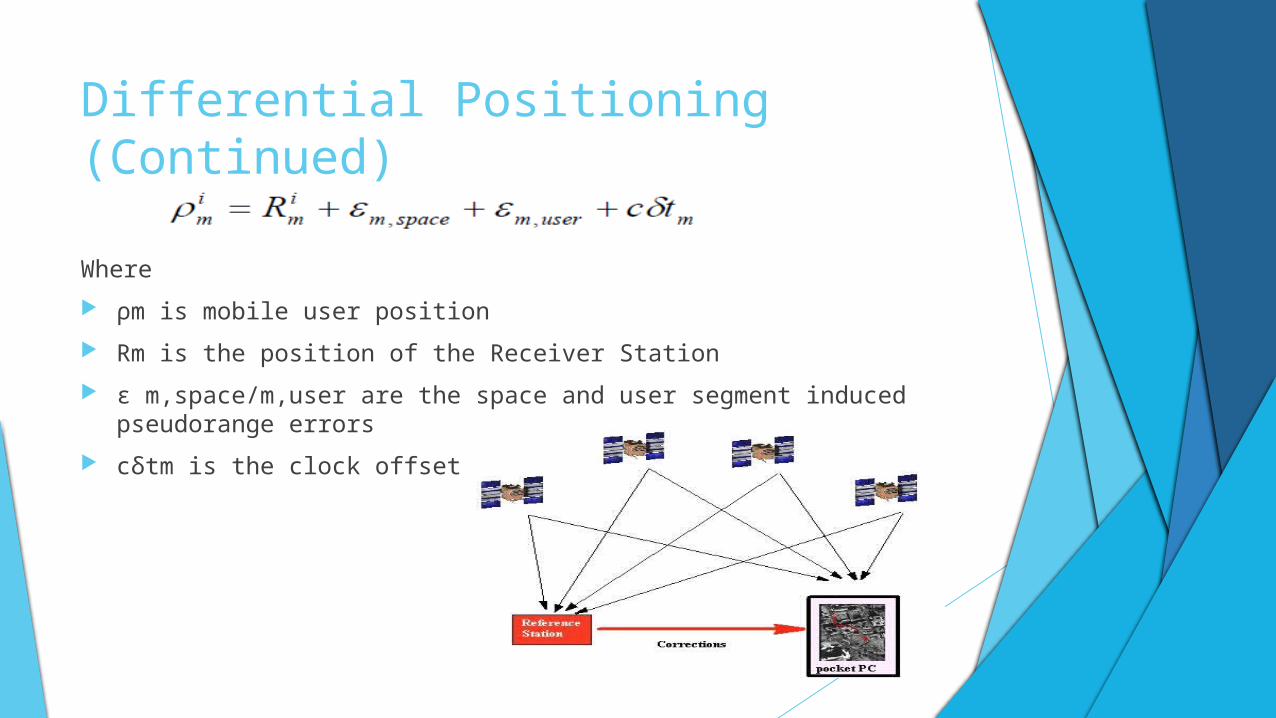
Differential Positioning (Continued)
Where ρm is mobile user position Rm is the position of the Receiver Station ε m,space/m,user are the space and user segment induced
pseudorange errors cδtm is the clock offset

Carrier Phase based Algorithm
Carrier phase measurements in GPS are well known to enable precision performance at centimeter level
Carrier frequency sent from satellite can vary due to Doppler shift The change in this frequency can be used to determine how far away
the Satellite is from the receiver
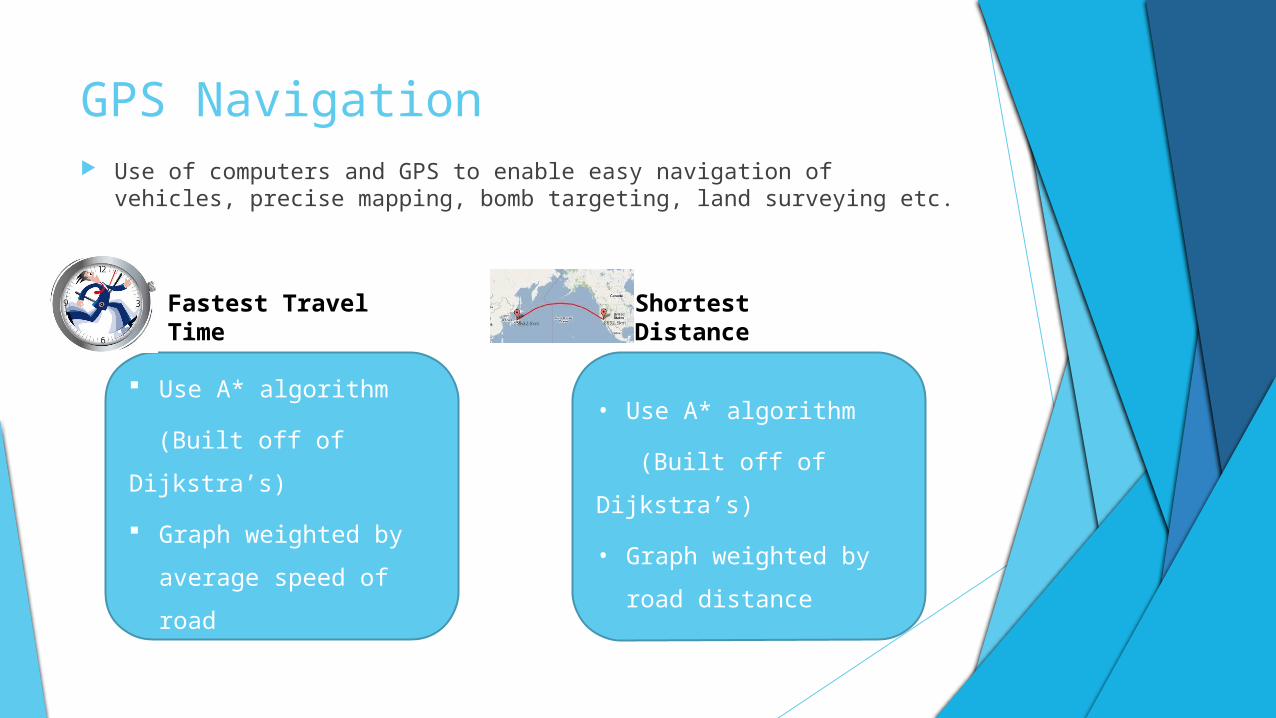
GPS Navigation Use of computers and GPS to enable easy navigation of vehicles,
precise mapping, bomb targeting, land surveying etc.
Use A* algorithm
(Built off of Dijkstra’s) Graph weighted by
average speed of road
Fastest Travel Time
• Use A* algorithm
(Built off of Dijkstra’s)• Graph weighted by
road distance
Shortest Distance

A* Algorithm Graph search algorithm that solves the single-source shortest path
problem for a graph by using an admissible heuristic and by taking the distance it has already traveled into account.
Approach Greedy (best first search)
Input Weighted graph G={E,V}, source vertex v∈V, and goal vertex.
Output Length of shortest path from a given source vertex v∈V to a goal vertex.
Time/Space
Complexity
Constant heuristic: O(n^2) Optimal heuristic: O(n)
If the heuristic h satisfies h(x) ≤ d(x, y) + h(y) for every edge (x, y) of the graph (where d denotes the length of that edge), it
is optimal.
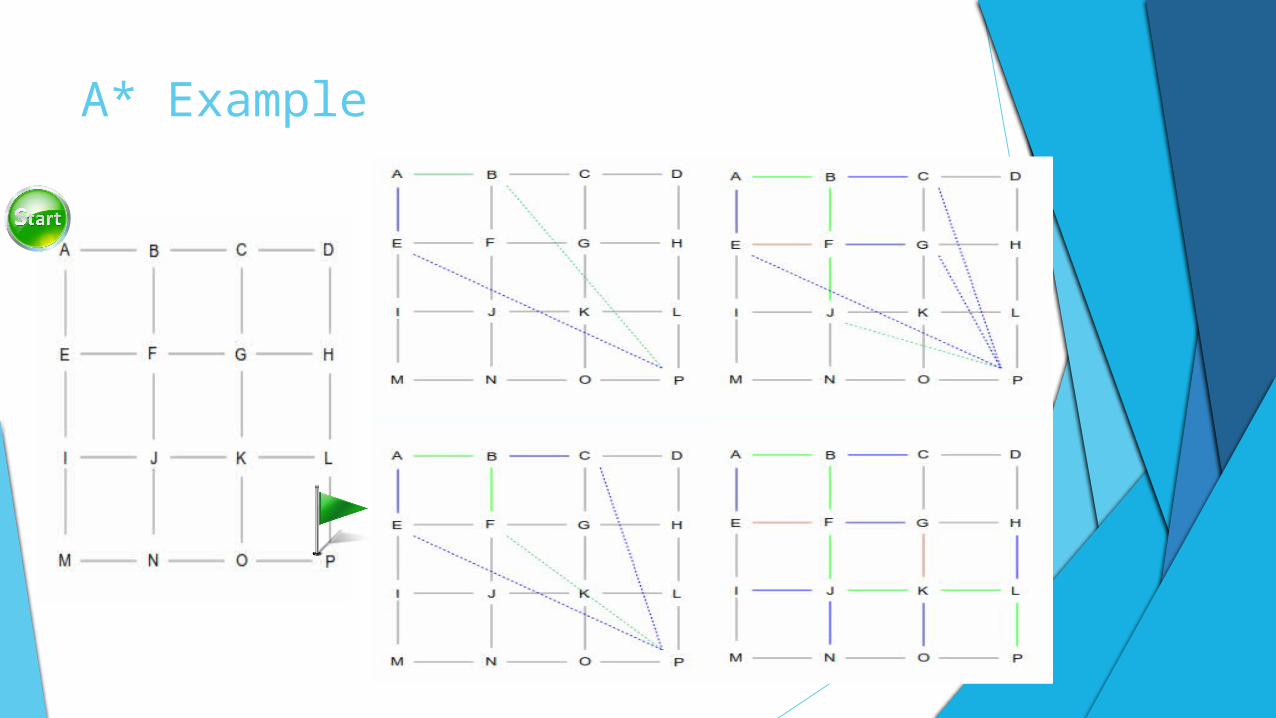
A* Example

A* Example

Cell Phone Towers & Wi-Fi
Cell phone towers can be used to calculate a relative accurate location of a mobile device such as a cell phone using the ping from at least 3 towers
Accuracy is lesser than satellites
Similar to cell phone towers Wi-Fi uses ping from at least 3 routers
Accuracy is lesser than satellites
Features of GPS• GPS devices and Mobile Devices such as cell phones combine data from all sources (Satellites, Cell Phone Towers, Routers) to give the user an accurate position to where they are located on Earth
Location
• GPS device will determine its vertical distance from satellite
• Satellite will communicate with device how far it thinks it is from the center of the earth
• Device takes the difference to determine altitudeElevation
• GPS device monitors its position over a length of time
• Computes estimate of velocity by Change in distance/Change in time
Velocity

Conclusion
• GPS is mainly used for determining location and for routing and requires at least three satellites to do so
• GPS is reliant on accurate timing calculations and thus error correcting
• GPS can also calculate velocity and elevation, and use Wi-Fi or cell phone towers for locating