airborne measurement system during...
TRANSCRIPT

Reports o
AO
C
1. Int The puflight vadown toprogramMIELEC Areaaircraftnavigata comb
on Geodesy an
AIRBORNOF EGNO
Civil Aviatio
Abstract The air traand adeqmeasuringprecisely poverbalanHowever requires aAs part ofparameterEGNOS, GEGNOS Aenabled totransport. Keywords
roduction
urpose of thalidation ao LPV minmme “SupC” [4]. a Navigatiot operationtion signabination of
nd Geoinforma
NE MEASOS/GNSS
An
on PersonnS
t
ansport reqquate procg technologput standar
ncing staticoperational
applying gef conductedrs (accuraGNSS signaAPV Opero draw righ Details wil
s: Flight Va
n
his article activities ofnima, at Kapport to t
on (RNAVn on: any dals, withinthese [10]
atics vol. 96 /
SUREMES ESSEN
ndrzej Fel
nel EducatSilesian Un
quires certifiedures. Hogies depenrd ground sc geodetic l activity, dodetic tech
d air tests thacy, credibals, made arational Impt procedurell be presen
alidation, RN
is to showf one RNAVatowice airthe EGNO
) can be ddesired co the limi.
/2014; pages 2
27
NT SYSTNTIAL PA
lner, Hen
tion Centreniversity of
ficate of groowever app
nd on takensystems and
techniquesdepending ohniques andhey made thbility, availas part of Euplementatio
es up and tonted in the fo
NAV, EGNO
w evidenceAV approacrport [3]. ItOS APV
defined asourse withits of a
27-37
TEM DURARAMET
nryk Jafern
e of CentraTechnolog
ound and dplied geodn undertakd the navigas and meaon the phasd measuringhe validatiolability, couropean proon – APV o apply satefollowing art
OS/GNSS, L
of the woch Instrumet is a deliveOperation
s a methodin the covself-contai
DOI: 1
RING VATERS IN L
nik
al and Eastgy
eck devicesdetic technikings. If oational assiasuring tecse of the flg „technologn of four funtinuity) oojects: “Sup
MIELEC”,ellite signalsticle.
LPV
rk carried ent Flight Perable of tal Implem
d of navigaerage of sined syste
10.2478/rgg-2
ALIDATIOLANDING
tern Europ
s, systems iques and
one should istance are chnologies. light a real
ogies time”. undamental of satellite pport to the air tests
ls in the air
out as parProcedurethe TEN-T
mentation
ation that station-refeem capab
2014-0004
ON G
pe
rt of the es (IFP),
funded – APV
permits erenced bility or
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM
Reports o
RNAuse of to or fro
- A
- Ad
- w
Focusindepend
- - A- A
The impleminstrumapproa APVWAAS guidancagainstEGNOSspecificno infrstanda 2. Pro Before RNAV List of (FAS) D
on Geodesy an
AV was deavailable aom any spA route stpoint to redAircraft cadeparture Instrumentwithout locng on theding on theRNAV NPAAPV Baro APV SBADA/H). 36th ICA
ment approment runwaaches by 20V SBAS is
[7] in thece is equt a geometS, presencally desigrastructurelone avion
ocedure p
the accesGNSS appwaypoints
Data Block
nd Geoinforma
eveloped toairspace. Tecific radioructure caduce flight n be flownpaths to ext approachcal instrum last poin
e kind of RA - approa- approach
AS - appro
AO Assemoach proceay ends, eit016 [11]. s supportee USA [6]ivalent to trical path
nts a feasgned for ape on the ics possib
presentatio
sion to theproach [12s (Table 1k (Table 3)
atics vol. 96 /
o provide This methoo navigatioan be orga
distance an into termixpedite trahes can bent landingt, RNAV aNAV appro
ach withouth with barooach with
bly in 200edures withther as the ed by sat and EGNan ILS loin space r
sible solutpproach op
aerodromle thereby
on and gro
e ground a] was nece), Path Te.
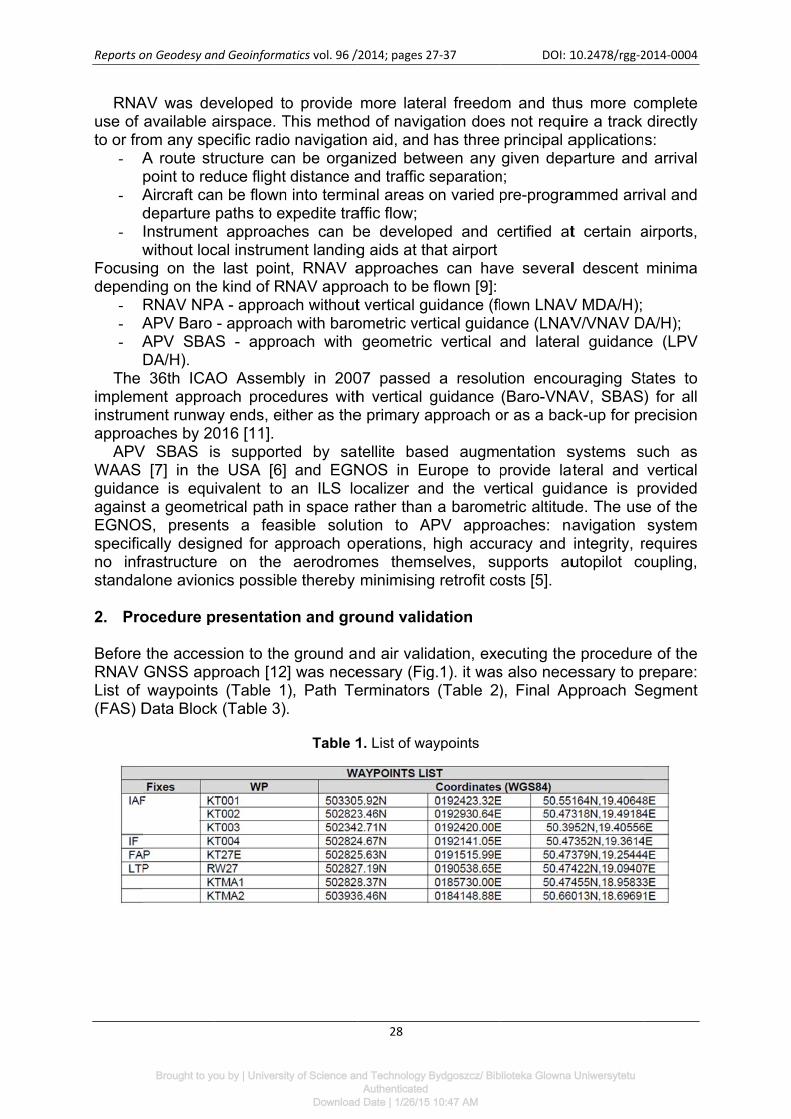
Table 1
/2014; pages 2
28
more lateod of navigon aid, andanized betwand traffic nal areas
affic flow; be developg aids at thapproacheoach to bet vertical gometric vergeometric
07 passedh vertical e primary a
tellite basNOS in Eocalizer anrather thantion to Aperations,
mes themsminimising
ound valid
nd air validessary (Figerminators
1. List of wa
27-37
ral freedomgation does
has three ween any separationon varied p
ped and chat airportes can hav
flown [9]:uidance (flrtical guidac vertical
d a resolutguidance
approach o
sed augmeurope to pnd the ven a baromeAPV appro
high accuselves, sug retrofit co
dation
dation, exeg.1). it wass (Table 2)
aypoints
DOI: 1
m and thus not requiprincipal agiven dep
n; pre-progra
certified at
ve several
own LNAVance (LNAVand latera
tion encou(Baro-VNA
or as a bac
entation sprovide latrtical guidetric altitudoaches: nauracy and upports auosts [5].
ecuting thes also nece), Final Ap
10.2478/rgg-2
us more coire a track applicationparture and
ammed arr
t certain a
l descent
V MDA/H); V/VNAV Dal guidanc
uraging StAV, SBASck-up for p
systems steral and
dance is pde. The usavigation integrity, rutopilot co
e proceduressary to ppproach S
2014-0004
omplete directly s:
d arrival
ival and
airports,
minima
DA/H); ce (LPV
tates to ) for all recision
such as vertical
provided e of the system
requires oupling,
re of the prepare:
Segment
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM
Fellner, A
A., Jafernik, H.: Airborne meeasurement sy
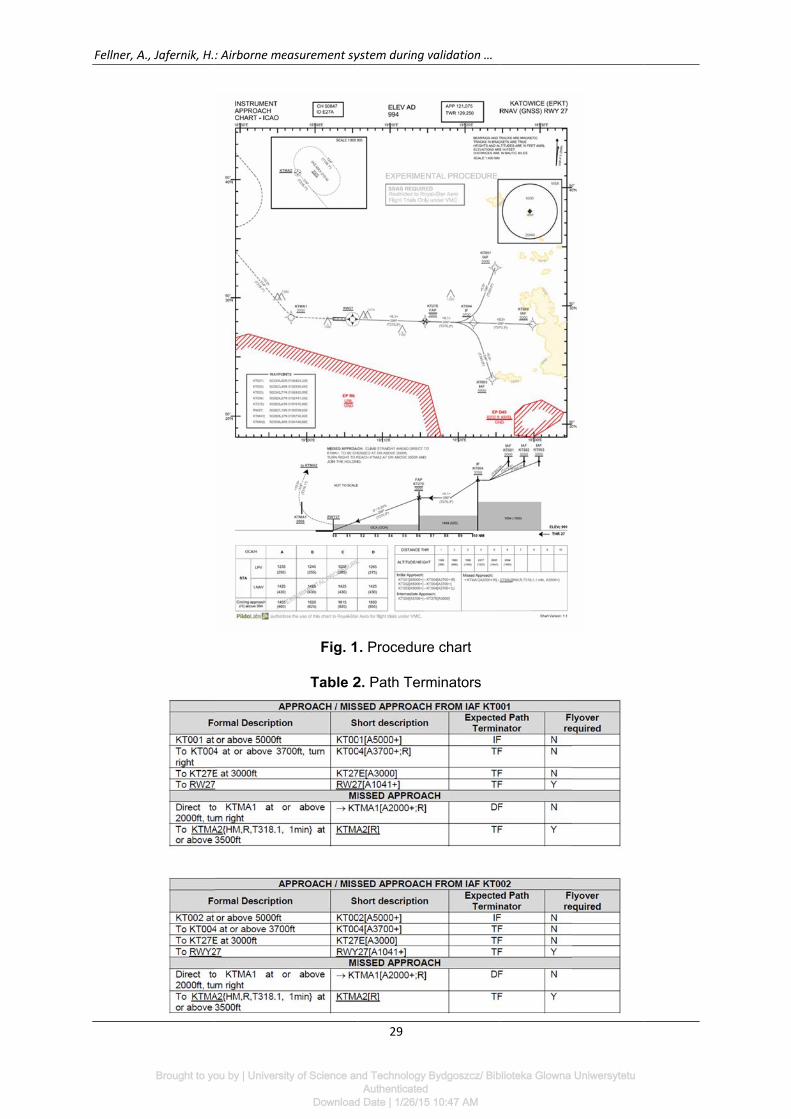
Fig. 1
Table 2
ystem during v
29
. Procedure
2. Path Term
validation …
e chart
minators
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Reports o
A grbeen p
-
- - T- T
The referenwere ccriteria ILS locof the FconsideTHR09importaobtainsexisting
on Geodesy an
round validerformed tIt has bee[4]; It has beenThe TerraiThe controreviewers
nced. This orrected aconcernin
calizer (LOFPAP shoered that th
9 (runway ant issue s are not eg ILS proce
Fig. 2. FP
nd Geoinforma
T
dation wastogether wen confirme
n confirmein maps usolled obstas involved entailed a
accordinglyng the posC) is locatuld be thehe localizeend) posoperation
exactly theedure. Figu
PAP locatio
atics vol. 96 /
Table 3. FA
s next actioith PANSAed the app
d the datased (DTM fcles arounrealised tsubstantia
y prior to thsition wherted more te one specer was location, beingally speake same thure 3. show
n, ILS local
/2014; pages 2
30
AS Databloc
on. The re
A and Pildoplication o
accuracy from SRTM
nd the airpohat one o
al reductionhe flight trre the FPAhan 305 m
cified in theated at 305g the lengking. The hat the onws this sm
izier more t
27-37
ck input dat
eview of tho. The mainof the crite
and integrM with 90 mort were prf the obstn of the LPrials. ThereAP has beemeters frome figure 2. 5 m. Therefgth offset
horizontaes that woall differen
than 305 m
DOI: 1
a
he IFP desn outcomeria specifie
rity; m accuracyrovided by acles (ID#
PV minima e is a slighen locatedm THR09.
The codiffore the FPnil. Howe
al deviationould be ob
nce.
from the ru
10.2478/rgg-2
sign packaes are: ed in PAN
y); the airpor
#79) was nvalue. The
ht deviationd. In KatowThus the
fication pePAP was cever, it is ns that thbtained fly
unway end
2014-0004
age has
NS-OPS
rt. not well e charts n of the wice the position rformed
coded in not an
he pilot ying the
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Fellner, A
Fig.
Pre-order tprovideSegme
- O- A
3. Flig The fovalidati
- T- T- T- A
t- A- T
v- T
c The with the430W callows LPV minside aFV planavigatincludin
A., Jafernik, H.
3 Differenc
flight valido validate
ed two screent Data bloOne usingAnother usDO-229D.
ght valida
ollowing guon activitieThe validaThe MisseThe Final AAll segmenthe LNAV A test dataThere wasvalidation The aircracapabilitiesFV was c
e appropriaconnectedflying duri
minima. Thea test datan inside thtion mode ng aircraft
: Airborne me
ce between
ation was the codin
eenshots wock: the onlinesing the in
ation
uidelines wes: ation was ced ApproacApproach nts of the approache
abase conts one pilot process ob
aft used dus for whichconducted ate RNAV with otheng all phase IFP to babase prodhe FMS-lik
using thepositioning
easurement sy
the Full Sc
next actiong of the d
with the res
e application-house to
were take
carried out ch segmenSegment happroach
es were alrtaining the acting as
bserving thuring the flih the IFP w
with a Pipequipmenr required ses of flighbe validateduced by
ke Garmin e GPS/SBAg, was prov
ystem during v
31
cale Deflect
n. A Jeppdatabase usults of the
on developol develop
en into co
in daylightnt was flowhas to be fwere flownready flownRNAV IFPFVP, and
he ‘out of cight valida
was designper Senec
nt for conduavionics (
ht, from ened, designJeppesen device an
AS guidanvided by th
validation …
ion of the IL
esen codinused in thee CRC gen
ped by EURped by Pild
onsideration
t hours undn; flown ½ scn at least on during thP was usedone obser
cockpit’ envtion had thed.
ca II aircraucting LPV(antenna, Cn-route to ped by Pildand Garm
nd conductce. Guida
he CDI/VD
LS with resp
ng screense aircraft. neration an
ROCONTRdo Labs in
n for cond
der VMC c
ale down, once (segmhe LNAV vad; ver assistivironment; he appropr
aft. The airV operationCDI/VDI). precision a
do and PAmin. The pted the triance duringI fed by the
pect to the
shot is provFurthermo
nd Final Ap
ROL n accordan
ducting th
conditions;
at least onments comalidation fli
ng the FV riate perfo
rcraft is eqns: a GarmThe compapproach d
ANSA, waspilots inserals in the rg the entire GNS 430
APV
vided in ore, it is pproach
nce with
he flight
nce; mmon to ights);
P in the
ormance
quipped min GNS plete set down to s coded rted the relevant re flight, 0W.
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Reports o
Befoa predithe AR
-
- TC
- Tw
The The essimulatKatowic The show tdrawn j The with thesuccesmissedaltitude
- 5a
- - 9
on Geodesy an
ore the flighctive RAIMP, consideNo digital (useful in mountainoThe GPS Center weThe simulawith sampobtained
stimated htions ensuce during tdata analy
the trajectjointly withfollowing f
e waypoinssfully accod approaches have be5000 ft, wapproache1235 ft, wh991 ft, whi
nd Geoinforma
ht trials, thM algorithmering also tterrain mosome env
ous environalmanac wbsite; ation was les every 5result is o
horizontal aured that tthe whole dysis focuseories flow
h the testedfigures prets and runomplished
h or a landien plotted
which is thes; hich is the ch is the e
atics vol. 96 /
he local APm developethe followinodel was uironments
nment); was down
carried ou5 minutes.f a 100% and verticthe EGNOday. es on the dn during td paths (yeesent the fnway thres
the operang was co: he minimu
CAT a LPVelevation of
Fig. 4. DO
/2014; pages 2
32
PV-1 availaed by Pildong conditioused to sim
to take in
nloaded fro
t for a 12
APV-1 avacal errors wOS would e
data recordthe approaellow lines)flight trajecshold (Fig. ations up onducted. I
um altitude
V minima f RWY 27
OP for Kato
27-37
ability in tho Labs. Theons: mulate the nto accoun
om the U.S
hours data
ailability atwere alsoenable an
ded during aches (Fig). ctories of t6, 7). It cato the OCn the profi
e to fly th
(OCA) of tTHR
owice ARP
DOI: 1
e area wae analysis
local condnt the mas
S. Coast G
aset (from
t the thresestimated
APV-1 le
the flightsg. 5). The
he demonan be seen
CA/H valuele views, t
he initial s
he procedu
10.2478/rgg-2
as simulatewas perfo
ditions of tking cause
Guard Nav
9:00h to 2
shold coordd (Fig. 4).evel of se
s. The nexte approach
nstrations tn how the es, when ethe next re
segments
ures;
2014-0004
ed using rmed at
he area ed by a
vigation
21:00h),
dinates. . These rvice at
t figures hes are
together aircraft
either a eference
of both
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Fellner, A
.
A., Jafernik, H.
Fig. 6. App
Fig.7. Appr
: Airborne me
Fig. 5
proach 1: pla
roach 2: pla
easurement sy
5. Plan view
an view of A
an view of A
ystem during v
33
w of the fligh
A/C flight pa
A/C flight pa
validation …
ht demonstr
ath (left), A/
ath (left), A/C
rations
C altitude p
C altitude p
profile (right
profile (right)
t)
)
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM
Reports o
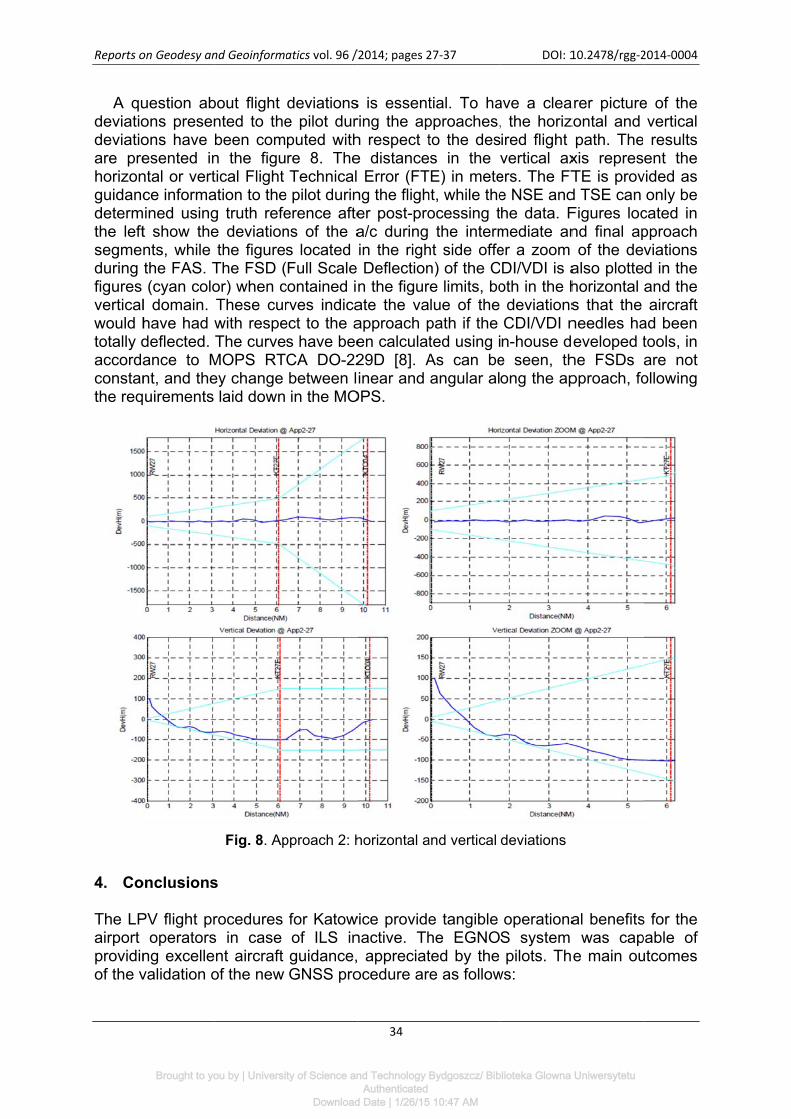
A qudeviatiodeviatioare prehorizonguidancdetermthe leftsegmeduring figures verticalwould htotally daccordaconstanthe req
4. Co The LPairport providinof the v
on Geodesy an
uestion abons presenons have esented inntal or vertce informa
mined usingt show thents, while the FAS. T(cyan colo
l domain. have had wdeflected. ance to Mnt, and theuirements
onclusions
PV flight properators
ng excellevalidation o
nd Geoinforma
bout flight nted to thebeen comn the figutical Flight ation to theg truth refee deviationthe figure
The FSD (or) when cThese curwith respeThe curve
MOPS RTey change
laid down
Fig. 8. Ap
s
rocedures s in case nt aircraft of the new
atics vol. 96 /
deviationse pilot durputed withre 8. TheTechnical
e pilot durinerence aftens of the as located Full Scale
contained irves indica
ect to the as have beeCA DO-22between lin the MO
pproach 2: h
for Katowof ILS inguidance,GNSS pro
/2014; pages 2
34
s is essentring the aph respect te distance Error (FT
ng the fligher post-proa/c during in the righ Deflectionn the figurate the vaapproach pen calculat29D [8]. Ainear and
OPS.
horizontal a
wice providenactive. Th appreciat
ocedure ar
27-37
tial. To happroaches,to the dess in the
TE) in meteht, while theocessing t
the intermht side offen) of the Cre limits, bolue of the path if the ted using iAs can beangular al
and vertical
e tangible he EGNOted by the re as follow
DOI: 1
ave a clea, the horizired flight vertical ax
ers. The FTe NSE andhe data. Fmediate aner a zoom DI/VDI is aoth in the h
deviationsCDI/VDI nn-house d
e seen, thong the ap
deviations
operationaS system pilots. Th
ws:
10.2478/rgg-2
arer picturezontal and
path. Thexis represTE is provd TSE can Figures locnd final apof the de
also plottehorizontal s that the needles haeveloped t
he FSDs pproach, fo
al benefitswas cap
e main ou
2014-0004
e of the vertical results ent the
vided as only be
cated in pproach viations d in the and the aircraft
ad been tools, in are not ollowing
s for the pable of utcomes
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Fellner, A., Jafernik, H.: Airborne measurement system during validation …
35
- The EGNOS availability performance APV-I was fully achieved during all the approaches;
- The coding of the procedure for SBAS is satisfactory; - The horizontal and vertical sensibility of the CDI was successfully tested; - The procedure is safe from the obstacle clearance point of view (it has been
flown ½ scale down the nominal glide path without identifying potential obstacles);
- No significant obstacles were found when overflying the surroundings of the airport either;
- The flyability of the procedure was correct. The ground and flight validation performed are successful. As a result of conducted research, in April 2013 was placed twenty one of procedures for airports in AIP POLAND. References [1] EASA - AMC 20-26 : Airworthiness Approval and Operational Criteria for RNP AR
Operations; [2] EASA - AMC 20-27: Airworthiness Approval and Operational Criteria for RNP
APPROACH (RNP APCH) Operations Including APV BARO VNAV Operations; [3] EASA - Helicopters Deploy GNSS in Europe (HEDGE) project documentation, [4] EGNOS Introduction in European Eastern Region MIELEC project documentation, [5] FAA - AC 20-129: Airworthiness Approval for Vertical Navigation (VNAV) Systems
for Use in the U.S. National Airspace System (NAS) and Alaska; [6] FAA - AC 20-105: Approval Guidance for RNP Operations and Barometric Vertical
Navigation in the U.S. National Airspace System; [7] FAA: TSO C145A: Airborne Navigation Sensors Using the Global Positioning
System (GPS) Augmented by the Wide Area Augmentation System (WAAS); [8] FAA - TSO C146A: Stand-Alone Airborne Navigation Equipment Using the Global
Positioning System Augmented by the Wide Area Augmentation System (WAAS); [9] ICAO Annex 10, [10] ICAO Doc 8168 – PANS-OPS, [11] ICAO Doc 9613 – PBN Manual, [12] ICAO Doc 9905 – RNP AR Procedure Design Manual
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM

Reports on Geodesy and Geoinformatics vol. 96 /2014; pages 27-37 DOI: 10.2478/rgg-2014-0004
36
Acronyms and Abbreviations A/C - Aircraft AD - Aerodrome or Airport AGL- Above Ground Level AIP - Aeronautical Information Publication APV - Approach with Vertical guidance ARP - Aerodrome Reference Point CDI - Course Display Indicator CRC - Cyclic Redundancy Check DA/DH - Decision Altitud/ decision Height DF - Direct to Fix DOP - Dilution of Precision DTM - Digital Terrain Model EGNOS - European Geostationary Navigation Overlay System EPKT - ICAO code for Katowice International airport ESSP - European Satellite Service Provider FAP - Final Approach Fix FAS - Final Approach Segment FPAP - Flight Path Alignment Point FSD - Full Scale Deflection FTE - Flight Technical Error FVP - Flight Validation Pilot GNSS - Global Navigation Satellite System GPS - Global Positioning System IAF - Initial Approach Fix ICAO - International Civil Aviation Organisation ID - Identifier IF - Intermediate Fix (Initial Fix for Path terminators) IFP - Instrument Flight Procedure IFR - Instrumental Flight Rules ILS - Instrumental Landing System LNAV/VNAV - Lateral/Vertical Navigation LPV - Localizer Performance with Vertical guidance LTP - Landing Threshold Point MA - Missed Approach MOPS - Minimum Operational Performance Specifications NM - Nautical Miles NPA - Non Precision Approach OCA/H - Obstacle Clearance Altitude/ Height PANSA - Polish Air Navigation Services Agency RAIM Receiver Autonomous Integrity Monitoring RNAV - Area Navigation RWY - Runway SBAS - Satellite Based Augmentation System SIS - Signal in space TCH - Threshold Crossing Height TF - Track to Fix THR - Threshold VDI - Vertical Display Indicator
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM
Fellner, A., Jafernik, H.: Airborne measurement system during validation …
37
VFR - Visual Flight Rules VMC - Visual Meteorological Conditions WAAS - Wide Area Augmentation System WGS - World Geodesic System WP – Waypoint LOC - Localiser (azimuth guidance portion of ILS) MDA - Minimum Decision Altitude MDH - Minimum Decision Height LNAV - Lateral Navigation VNAV - Vertical Navigation NSE - Navigation System Error RTCA - Requirements and Technical Concepts for Aviation TEN-T - Trans-European Networks - Transport TSE - Total System Error Authors:
Prof. D. Sc Eng. navig Andrzej Fellner 1), [email protected] D. Sc, Eng. Henryk Jafernik 1), [email protected] 1) Civil Aviation Personnel Education Centre of Central and Eastern Europe, Silesian University of Technology, 8 Krasinskiego str., 40-019 Katowice, Poland
Brought to you by | University of Science and Technology Bydgoszcz/ Biblioteka Glowna UniwersytetuAuthenticated
Download Date | 1/26/15 10:47 AM