ahmad basyir najwan jln. mr. cokrokusumo no.54 …. selanjutnya kita akan menggunakan hukum dua...
TRANSCRIPT

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 1
OSN Fisika 2016 Number 1
PERSAMAAN GERAK SEDERHANA BOLA SALJU (SIMPLE SNOW BALL EQUATION)
Tinjau sebuah bola salju yang sedang menggelinding. Seperti kita tahu, fenomena menggelindingnya bola salju diikuti oleh pertambahan massa bola tersebut. Biarpun massa bertambah, kita asumsikan bahwa bola salju selalu berbentuk bola sempurna, memiliki rapat massa persatuan volum 𝜌 yang konstan, dan selalu menggelinding tanpa slip. Sekarang, kita akan meninjau bola salju yang berjari-jari sesaat 𝑟, dan kecepatan sudut sesaat 𝜔, serta gaya gesek sesaat 𝑓, menggelinding pada sebuah bidang dengan kemiringan 𝜃 (lihat gambar).
Tentukan :
a. Besar gaya total (dengan arah sejajar bidang) b. Besar torsi total (di pusat massa bola) c. Persamaan gerak bola salju! Ini disebut sebagai SSBE (simple snow ball equation).
Nyatakan SSBE dalam 𝜃, 𝑟, 𝜔, dan 𝑡!
Untuk memudahkan perhitungan, selanjutnya kalian tinjau bola salju tersebut menggelinding pada sebuah bidang datar.
d. Jika kecepatan sudut awal adalah 𝜔0(dan sudah tidak slip tentunya) dan jari-jari bola awal adalah 𝑅0 tentukan jari-jari bola salju sebagai fungsi kecepatan sudut!
Untuk mudahnya, diasumsikan bahwa setiap bergesekan dengan tanah, massa bola akan bertambah dengan konstan sehingga 𝑑𝑚 𝑑𝑥⁄ = 𝐾 = konstan.
e. Tentukan kecepatan sudut sebagai fungsi waktu (nyatakan dalam 𝐾, 𝜌, 𝑅0, dan 𝜔0)!
Pembahasan :
a. Berdasarkan gambar di bawah kita bisa dapatkan resultan gaya yang bekerja pada bola salju searah dengan gerakannya.
Σ𝐹 = 𝑚𝑔 sin 𝜃 − 𝑓
𝑟
𝜌
𝜃
𝑔
𝑓
𝑚𝑔 sin 𝜃
𝑟
𝜌
𝜃
Arah gerak
𝑚𝑔

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 2
b. Torsi yang bekerja pada bola salju hanyalah torsi akibat gaya gesek. Torsi akibat gaya yang lainnya(gaya gravitasi dan gaya normal) bernilai nol karena melewati pusat bola salju.
Σ𝜏 = 𝑓𝑟
c. Selanjutnya kita akan menggunakan hukum dua newton. Pada kasus ini kita akan menggunakan hukum dua newton yang berhubungan dengan perubahan momentum linier dan momentum sudut bola.
Momentum bola salju adalah
𝑃 = 𝑚𝑣
dan perubahannya adalah
𝑑𝑃
𝑑𝑡= 𝑚
𝑑𝑣
𝑑𝑡+ 𝑣
𝑑𝑚
𝑑𝑡
Momentum sudut bola salju adalah
𝐿 = 𝐼𝜔
dan perubahannya adalah
𝑑𝐿
𝑑𝑡= 𝐼
𝑑𝜔
𝑑𝑡+ 𝜔
𝑑𝐼
𝑑𝑡
Dengan hukum dua newton kita dapatkan
Σ𝐹 = 𝑚𝑔 sin 𝜃 − 𝑓 =𝑑𝑃
𝑑𝑡= 𝑚
𝑑𝑣
𝑑𝑡+ 𝑣
𝑑𝑚
𝑑𝑡
𝑚𝑔 sin 𝜃 − 𝑓 = 𝑚𝑑𝑣
𝑑𝑡+ 𝑣
𝑑𝑚
𝑑𝑡… (1)
Σ𝜏 = 𝑓𝑟 =𝑑𝐿
𝑑𝑡= 𝐼
𝑑𝜔
𝑑𝑡+ 𝜔
𝑑𝐼
𝑑𝑡
𝑓 =𝐼
𝑟
𝑑𝜔
𝑑𝑡+𝜔
𝑟 𝑑𝐼
𝑑𝑡… (2)
Subtitusi persamaan (2) ke (1)
𝑚𝑔 sin 𝜃 −𝐼
𝑟
𝑑𝜔
𝑑𝑡−𝜔
𝑟 𝑑𝐼
𝑑𝑡= 𝑚
𝑑𝑣
𝑑𝑡+ 𝑣
𝑑𝑚
𝑑𝑡
𝑑𝑣
𝑑𝑡+𝑣
𝑚 𝑑𝑚
𝑑𝑡+𝐼
𝑚𝑟
𝑑𝜔
𝑑𝑡+𝜔
𝑚𝑟 𝑑𝐼
𝑑𝑡= 𝑔 sin 𝜃… (3
Selanjutnya kita akan mencari hubungan antara variabel v, I, m, r, dan ω.
Hubungan kecepatan linier dan kecepatan sudut bola adalah
𝑣 = 𝜔𝑟…(4)
𝑑𝑣
𝑑𝑡=𝑑(𝜔𝑟)
𝑑𝑡= 𝜔
𝑑𝑟
𝑑𝑡+ 𝑟
𝑑𝜔
𝑑𝑡⟹𝑑𝑣
𝑑𝑡= 𝜔
𝑑𝑟
𝑑𝑡+ 𝑟
𝑑𝜔
𝑑𝑡… (5)
Hubungan massa bola dan jari-jarinya adalah

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 3
𝑚 =4
3𝜌𝜋𝑟3…(6
𝑑𝑚
𝑑𝑡= 4𝜌𝜋𝑟2
𝑑𝑟
𝑑𝑡= (
4
3𝜌𝜋𝑟3⏟ 𝑚
)3
𝑟
𝑑𝑟
𝑑𝑡⟹𝑑𝑚
𝑑𝑡=3𝑚
𝑟
𝑑𝑟
𝑑𝑡… (7)
Selanjutnya dari momen inersia bola salju akan kita dapatkan
𝐼 =2
5𝑚𝑟2…(8
𝑑𝐼
𝑑𝑡=4
5𝑚𝑟
𝑑𝑟
𝑑𝑡+2
5𝑟2𝑑𝑚
𝑑𝑡… (9)
Subtitusi persamaan (7) ke (9)
𝑑𝐼
𝑑𝑡=4
5𝑚𝑟
𝑑𝑟
𝑑𝑡+6
5𝑚𝑟
𝑑𝑟
𝑑𝑡=10
5⏟2
𝑚𝑟𝑑𝑟
𝑑𝑡⟹𝑑𝐼
𝑑𝑡= 2𝑚𝑟
𝑑𝑟
𝑑𝑡… (10
Selanjutnya subtitusi persamaan (4), (5), (7), (8), dan (10) ke persamaan (3)
𝑑𝑣
𝑑𝑡+𝑣
𝑚 𝑑𝑚
𝑑𝑡+𝐼
𝑚𝑟
𝑑𝜔
𝑑𝑡+𝜔
𝑚𝑟 𝑑𝐼
𝑑𝑡= 𝑔 sin 𝜃
𝜔𝑑𝑟
𝑑𝑡+ 𝑟
𝑑𝜔
𝑑𝑡+𝜔𝑟
𝑚 3𝑚
𝑟
𝑑𝑟
𝑑𝑡+1
𝑚𝑟
2
5𝑚𝑟2
𝑑𝜔
𝑑𝑡+𝜔
𝑚𝑟2𝑚𝑟
𝑑𝑟
𝑑𝑡= 𝑔 sin 𝜃
𝜔𝑑𝑟
𝑑𝑡+ 𝑟
𝑑𝜔
𝑑𝑡+ 3𝜔
𝑑𝑟
𝑑𝑡+2
5𝑟𝑑𝜔
𝑑𝑡+ 2𝜔
𝑑𝑟
𝑑𝑡= 𝑔 sin 𝜃
6𝜔𝑑𝑟
𝑑𝑡+7
5𝑟𝑑𝜔
𝑑𝑡= 𝑔 sin 𝜃 … (11)
Sehingga persamaan gerak sederhana bola salju (SSBE/Simple Snow Ball Equation) adalah
6𝜔𝑑𝑟
𝑑𝑡+7
5𝑟𝑑𝜔
𝑑𝑡= 𝑔 sin 𝜃
d. Selanjutnya bola menggelinding pada bidang datar sehingga sudut 𝜃 sama dengan nol.
𝜃 = 0 ⟹ sin 𝜃 = 0
6𝜔𝑑𝑟
𝑑𝑡+7
5𝑟𝑑𝜔
𝑑𝑡= 0… (12)
𝑑𝑟
𝑟= −
7
30
𝑑𝜔
𝜔
∫𝑑𝑟
𝑟
𝑟
𝑅𝑜
= −7
30∫
𝑑𝜔
𝜔
𝜔
𝜔𝑜
ln |𝑟
𝑅𝑜| = −
7
30ln |
𝜔
𝜔𝑜|

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 4
ln |𝑟
𝑅𝑜| = ln |
𝜔
𝜔𝑜|−730
𝑟
𝑅𝑜= (
𝜔
𝜔𝑜)−730⟹ 𝑟 = 𝑅𝑜 (
𝜔
𝜔𝑜)−730…(13)
Maka persamaan jari-jari bola sebagai fungsi kecepatan sudut adalah
𝑟 = 𝑅𝑜 (𝜔
𝜔𝑜)−730
e. Sekarang massa pertambahan massa bola terhadap perpindahannya bernilai konstan yaitu 𝐾.
𝑑𝑚
𝑑𝑥= 𝐾
Selanjutnya dengan memodifikasi persamaan (7) akan kita dapatkan
𝑑𝑚
𝑑𝑡=3𝑚
𝑟
𝑑𝑟
𝑑𝑡| dikali dengan
𝑑𝑡
𝑑𝑥
𝑑𝑚
𝑑𝑥=3
𝑟𝑚𝑑𝑟
𝑑𝑥⟹ 𝑚 =
4
3𝜌𝜋𝑟3
𝐾 = 4𝜌𝜋𝑟2𝑑𝑟
𝑑𝑥
𝑑𝑟 =𝐾
4𝜌𝜋𝑟2 𝑑𝑥| dikali dengan
1
𝑑𝑡
𝑑𝑟
𝑑𝑡=
𝐾
4𝜌𝜋𝑟2 𝑑𝑥
𝑑𝑡⏟𝑣=𝜔𝑟
𝑑𝑟
𝑑𝑡=𝐾𝜔
4𝜌𝜋𝑟
𝑑𝑟
𝑟=
𝐾𝜔
4𝜌𝜋𝑟2𝑑𝑡 … (14)
Persamaan (12) kita bisa modifikasi menjadi bentuk
𝑑𝑟
𝑟= −
7
30
𝑑𝜔
𝜔
Selanjutnya kita subtitusi persamaan (14) dan (13) ke persamaan (12) hasil modifikasi di atas
𝐾𝜔
4𝜌𝜋 [𝑅𝑜 (𝜔𝜔𝑜)−730]
2 𝑑𝑡 = −7
30
𝑑𝜔
𝜔

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 5
𝐾
4𝜌𝜋𝑅𝑜2𝜔𝑜
715𝜔−
1430
𝑑𝑡 = −7
30
𝑑𝜔
𝜔2
𝑑𝜔
𝜔3715
= −15𝐾
14𝜌𝜋𝑅𝑜2𝜔𝑜
715
𝑑𝑡
∫𝑑𝜔
𝜔3715
𝜔
𝜔𝑜
= −∫15𝐾
14𝜌𝜋𝑅𝑜2𝜔𝑜
715
𝑑𝑡𝑡
0
∫ 𝜔−3715𝑑𝜔
𝜔
𝜔𝑜
= −∫15𝐾
14𝜌𝜋𝑅𝑜2𝜔𝑜
715
𝑑𝑡𝑡
0
−15
22[𝜔−
2215]
𝜔𝑜
𝜔
= −15𝐾𝑡
14𝜌𝜋𝑅𝑜2𝜔𝑜
715
1
𝜔2215
−1
𝜔𝑜2215
=11𝐾𝑡
7𝜌𝜋𝑅𝑜2𝜔𝑜
715
1
𝜔2215
=1
𝜔𝑜2215
+11𝐾𝑡
7𝜌𝜋𝑅𝑜2𝜔𝑜
715
1
𝜔2215
=1
𝜔𝑜2215
(1 +11𝐾𝜔𝑜𝑡
7𝜌𝜋𝑅𝑜2)
𝜔2215 =
𝜔𝑜2215
1 +11𝐾𝜔𝑜𝑡
7𝜌𝜋𝑅𝑜2
𝜔 = 𝜔𝑜 [1 +11𝐾𝜔𝑜𝑡
7𝜌𝜋𝑅𝑜2]
−2215

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 6
OSN Fisika 2015 Number 2
GERAKAN MASSA YANG TERHUBUNG DENGAN CINCIN DAN BATANG LICIN
Sebuah cincin bermassa 𝑚1 dapat bergerak bebas sepanjang batang licin horisontal. Sebuah partikel bermassa 𝑚2 dihubungkan dengan cincin melalui tali tegar tak bermassa yang memiliki panjang 𝐿. Mula-mula partikel 𝑚2 bersentuhan dengan batang, kemudian dilepas karena pengaruh gravitasi 𝑔. Setelah dilepas, ketika cincin tersebut telah bergeser sejauh 𝑥, sudut yang dibentuk antara tali dengan batang horisontal adalah 𝜃.
Tentukan:
a. Posisi 𝑥 dinyatakan dalam sudut 𝜃! b. Persamaan gerak untuk 𝜃 (tidak mengandung variabel 𝑥 beserta turunannya)! c. Tentukan besar tegangan batang dan gaya normal pada cincin untuk 𝜃 = 30𝑜!
Pembahasan :
a. Untuk mengetahui nilai 𝑥 dalam 𝜃 kita bisa menentukannya dengan meninjau titik pusat massa system. Karena tidak ada gaya eksternal atau gaya luar pada arah horizontal, maka posisi horizontal pusat massanya tetap. Sedangkan posisi pusat massa vertical system akan turun karena ada gaya eksternal yang bekerja pada arah vertical. System yang kita maksud adalah cincin dan massa kecil. Batang tidak kita masukkan karena batang tidak ikut bergerak.
𝑥𝑝𝑚,𝑎𝑤𝑎𝑙 = 𝑥𝑝𝑚,𝑎𝑘ℎ𝑖𝑟
𝑚2𝐿
𝑚1 +𝑚2=𝑚1𝑥 + 𝑚2(𝑥 + 𝐿 cos 𝜃)
𝑚1 +𝑚2
(𝑚1 +𝑚2)𝑥 = 𝑚2𝐿(1 − cos 𝜃)
𝑥 =𝑚2𝐿(1 − cos 𝜃)
𝑚1 +𝑚2
Sehingga posisi 𝑥 dinyatakan dalam 𝜃 adalah
𝑥 =𝑚2𝐿(1 − cos 𝜃)
𝑚1 +𝑚2
𝑥 = 0 𝑥 = 0
𝑚2
𝑚1
𝐿 𝜃
𝑥 𝑚1
𝑚2

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 7
b. Selanjutnya kita akan menentukan persamaan gerak system menggunakan metode Mekanika Lagrangian. Sebelum ke sana kita harus terlebih dahulu menentukan posisi benda-benda dalam system saat sudah bergerak. Dalam menentukan posisi benda, kita harus menentukan terlebih dahulu titik acuan atau titik asal koordinatnya. System koordinatnya bisa system koordinat Kartesius 2 dimensi atau 3 dimensi ataupun system koordinat lain. Untuk kasus ini kita akan menggunakan system koordinat kartesius 2 dimensi. Hal pertama yang harus kita lakukan adalah menentukan titik asalnya. Cara menentukannya adalah pilihlah titik asal sedemikian hingga persamaan gerak yang kita buat tidak terlalu banyak mengandung variabel. Dalam hal ini saya mengambil posisi awal cincin sebagai titik asal atau titik O(0,0). Posisi masing masing benda Cincin :
𝑥1 = 𝑥 =𝑚2𝐿(1 − cos 𝜃)
𝑚1 +𝑚2⟹ 𝑥1 =
𝑚2𝐿(1 − cos 𝜃)
𝑚1 +𝑚2
𝑦1 = 0
Partikel :
𝑥2 = 𝑥 + 𝐿 cos 𝜃 =𝑚2𝐿(1 − cos 𝜃)
𝑚1 +𝑚2+ 𝐿 cos 𝜃 ⟹ 𝑥2 =
𝑚1𝐿 cos 𝜃
𝑚1 +𝑚2
𝑦2 = −𝐿 sin 𝜃
Selanjutnya kita cari kecepatan partikel. Kita cukup mendiferensialkan posisinya terhadap waktu.
Cincin :
�̇�1 =𝑚2𝐿 �̇�sin 𝜃
𝑚1 +𝑚2
�̇�1 = 0
Partikel :
�̇�2 = −𝑚1𝐿 �̇�sin 𝜃
𝑚1 +𝑚2
�̇�2 = −𝐿 �̇�cos 𝜃
Berikutnya kita tentukan nilai total energy mekanik system.
Energi potensial (𝑉)
𝑉 = 𝑚1𝑔𝑦1 +𝑚2𝑔𝑦2
𝑉 = 𝑚1𝑔(0) + 𝑚2𝑔(−𝐿 sin 𝜃) ⟹ 𝑉 = −𝑚2𝑔𝐿 sin 𝜃
Energi kinetik (𝑇)
𝑇 =1
2𝑚1(�̇�1
2 + �̇�12) +
1
2𝑚2(�̇�2
2 + �̇�22)
𝑇 =1
2𝑚1 [(
𝑚2𝐿 �̇�sin 𝜃
𝑚1 +𝑚2)
2
+ (0)2] +1
2𝑚2 [(−
𝑚1𝐿 �̇�sin 𝜃
𝑚1 +𝑚2)
2
+ (−𝐿 �̇�cos 𝜃)2]

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 8
𝑇 =1
2
𝑚1𝑚2𝐿2 �̇�2sin2 𝜃
(𝑚1 +𝑚2)2(𝑚1 +𝑚2) +
1
2𝑚2𝐿
2 �̇�2cos2 𝜃
𝑇 =1
2
𝑚1𝑚2𝐿2 �̇�2sin2 𝜃
𝑚1 +𝑚2+1
2𝑚2𝐿
2 �̇�2cos2 𝜃
𝑇 =1
2
𝑚1𝑚2𝐿2 �̇�2sin2 𝜃
𝑚1 +𝑚2+1
2
𝑚2(𝑚1 +𝑚2)𝐿2 �̇�2cos2 𝜃
𝑚1 +𝑚2
𝑇 =1
2
𝑚22 cos2 𝜃 + 𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2
Lagrangian (𝐿) adalah selisih energy kinetik (𝐾) dan energy potensial (𝑉) system.
𝐿 = 𝑇 − 𝑉
𝐿 =1
2
𝑚22 cos2 𝜃 + 𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2 − (−𝑚2𝑔𝐿 sin 𝜃)
𝐿 =1
2
𝑚22 cos2 𝜃 + 𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2 +𝑚2𝑔𝐿 sin 𝜃
Persamaan gerak benda kita dapatkan dengan mensubtitusi L ke persamaan Lagrange di bawah.
𝑑
𝑑𝑡(𝜕𝐿
𝜕�̇�) −
𝜕𝐿
𝜕𝜃= 0
Bentuk 𝜕𝐿 𝜕�̇�⁄ dan 𝜕𝐿 𝜕𝜃⁄ adalah turunan parsial. Maksud turunan parsial adalah jika sebuah fungsi diturunkan terhadap peubah x, maka peubah yang lain dianggap sebagai konstanta.
𝜕𝐿
𝜕�̇�=𝜕
𝜕�̇�(1
2
𝑚22 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2 +𝑚2𝑔𝐿 sin 𝜃)
𝜕𝐿
𝜕�̇�=𝑚2
2 cos2 𝜃 + 𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�
𝑑
𝑑𝑡(𝜕𝐿
𝜕�̇�) =
𝑑
𝑑𝑡(𝑚2
2 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�) =
𝑚22 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̈�
𝑑
𝑑𝑡(𝜕𝐿
𝜕�̇�) =
𝑚22 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̈�
𝜕𝐿
𝜕𝜃=𝜕
𝜕𝜃(1
2
𝑚22 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2 +𝑚2𝑔𝐿 sin 𝜃)
𝜕𝐿
𝜕𝜃=𝑚2
2 𝐿2�̇�2cos 𝜃 sin 𝜃
𝑚1 +𝑚2+𝑚2𝑔𝐿 cos 𝜃
Maka persamaan gerak system adalah
𝑑
𝑑𝑡(𝜕𝐿
𝜕�̇�) −
𝜕𝐿
𝜕𝜃= 0

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 9
𝑚22 cos2 𝜃 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̈� − (
𝑚22 𝐿2�̇�2cos 𝜃 sin 𝜃
𝑚1 +𝑚2+𝑚2𝑔𝐿 cos 𝜃) = 0
(𝑚2 cos2 𝜃 +𝑚1)𝐿
2�̈� − 𝑚2 𝐿2�̇�2cos 𝜃 sin 𝜃 − (𝑚1 +𝑚2) 𝑔𝐿 cos 𝜃 = 0
Maka persamaan gerak system adalah
(𝑚2 cos2 𝜃 +𝑚1)𝐿�̈� − 𝑚2 𝐿�̇�
2cos 𝜃 sin 𝜃 − (𝑚1 +𝑚2) 𝑔 cos 𝜃 = 0
c. Kita diminta untuk menentukan nilai tegangan tali T dan gaya normal N batang pada cincin. Perhatikan diagram gaya di bawah!
Percepatan kedua benda adalah
Cincin :
�̈�1 =𝑚2𝐿
𝑚1 +𝑚2(𝜃 ̈ sin 𝜃 + �̇�2 cos 𝜃)
�̈�1 = 0
Partikel :
�̈�2 = −𝑚1𝐿
𝑚1 +𝑚2(𝜃 ̈ sin 𝜃 + �̇�2 cos 𝜃)
�̈�2 = 𝐿(�̇�2 sin 𝜃 − �̈�cos 𝜃)
Menggunakan hukum dua newton untuk kedua benda kita dapatkan
Untuk cincin :
𝑠𝑢𝑚𝑏𝑢 𝑥 ⟹ 𝑇 cos 𝜃 =𝑚1𝑚2𝐿
𝑚1 +𝑚2(𝜃 ̈ sin 𝜃 + �̇�2 cos 𝜃)… (1)
𝑠𝑢𝑚𝑏𝑢 𝑦 ⟹ 𝑁 − 𝑇 sin 𝜃 −𝑚1𝑔 = 0 ⟹ 𝑁 = 𝑇 sin 𝜃 + 𝑚1𝑔…(2)
Untuk partikel :
�̈�1
�̈�2
�̈�2 𝜃
𝑇 sin 𝜃
𝑇 sin𝜃
𝑇 cos 𝜃
𝑇 cos𝜃
𝑇 𝑇
𝑥 = 0
𝜃
𝑁
𝑚1𝑔
𝑚2𝑔

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 10
𝑠𝑢𝑚𝑏𝑢 𝑥 ⟹ −𝑇 cos 𝜃 = −𝑚1𝑚2𝐿
𝑚1 +𝑚2(𝜃 ̈ sin 𝜃 + �̇�2 cos 𝜃)… (3)
𝑠𝑢𝑚𝑏𝑢 𝑦 ⟹ 𝑇 sin 𝜃 − 𝑚2𝑔 = 𝑚2 𝐿(�̇�2 sin 𝜃 − �̈�cos 𝜃) ⟹ 𝑇
=𝑚2 𝐿(�̇�
2 sin 𝜃 − �̈�cos 𝜃) + 𝑚2𝑔
sin 𝜃… (4)
subtitusi persamaan (4) ke (2)
𝑁 =𝑚2 𝐿(�̇�
2 sin 𝜃 − �̈�cos 𝜃) + 𝑚2𝑔
sin 𝜃sin 𝜃 + 𝑚1𝑔
𝑁 = 𝑚2 𝐿(�̇�2 sin 𝜃 − �̈�cos 𝜃) + (𝑚1 +𝑚2)𝑔… (5)
Selanjutnya kita harus mencari tahu nilai �̇� dan �̈�. Kita akan menghitungnya dengan hukum kekekalan energy mekanik. Saat awal adalah saat tali masih berada dalam keadaan horizontal dan kedua benda masih diam serta saat akhir adalah saat tali membentuk sudut 𝜃 = 30𝑜 dengan horizontal.
𝐸𝑎𝑤𝑎𝑙 = 𝐸𝑎𝑘ℎ𝑖𝑟
0 = −𝑚2𝑔𝐿 sin 30𝑜 +
1
2
𝑚22 cos2 30𝑜 +𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2
0 = −𝑚2𝑔𝐿 (1
2) +
1
2
𝑚22 (12√3)
3
+𝑚1𝑚2
𝑚1 +𝑚2𝐿2�̇�2
(3𝑚2 + 4𝑚1)𝐿�̇�2 = 4(𝑚1 +𝑚2)𝑔
�̇�2 =4(𝑚1 +𝑚2)𝑔
(3𝑚2 + 4𝑚1)𝐿… (6)
�̇� = √4(𝑚1 +𝑚2)𝑔
(3𝑚2 + 4𝑚1)𝐿
Dengan mensubtitusi persamaan (6) ke persamaan gerak system akan kita dapatkan
(𝑚2 (1
2√3)
2
+𝑚1) 𝐿�̈� − 𝑚2𝐿 (4(𝑚1 +𝑚2)𝑔
(3𝑚2 + 4𝑚1)𝐿) (1
2√3) (
1
2) − (𝑚1 +𝑚2) 𝑔 (
1
2√3) = 0
(3
4𝑚2 +𝑚1) 𝐿�̈� = 𝑚2𝐿 (
4(𝑚1 +𝑚2)𝑔
(3𝑚2 + 4𝑚1)𝐿) (1
4√3) + (𝑚1 +𝑚2) 𝑔 (
1
2√3)|
(3𝑚2 + 4𝑚1)(3𝑚2 + 4𝑚1)𝐿�̈� = 4√3𝑚2(𝑚1 +𝑚2)𝑔 + 2√3(𝑚1 +𝑚2)(3𝑚2 + 4𝑚1)𝑔
(3𝑚2 + 4𝑚1)(3𝑚2 + 4𝑚1)𝐿�̈� = 2(𝑚1 +𝑚2)𝑔[2√3𝑚2 + 3√3𝑚2 + 4√3𝑚1]
�̈� =2√3(𝑚1 +𝑚2)[5𝑚2 + 4𝑚1]𝑔
(3𝑚2 + 4𝑚1)2𝐿… (7)
Dengan mensubtitusi persamaan (6) dan (7) ke persamaan (4) akan kita dapatkan nilai tegangan tali.
𝑇 =𝑚2 𝐿(�̇�
2 sin 𝜃 − �̈�cos 𝜃) + 𝑚2𝑔
sin 𝜃

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 11
𝑇 =
𝑚2 𝐿 ((4(𝑚1 +𝑚2)𝑔(3𝑚2 + 4𝑚1)𝐿
) (12) − (
2√3(𝑚1 +𝑚2)[5𝑚2 + 4𝑚1]𝑔(3𝑚2 + 4𝑚1)2𝐿
) (12√3)) +𝑚2𝑔
12
𝑇 =2𝑚1𝑚2(12𝑚1 + 11𝑚2)
(3𝑚2 + 4𝑚1)2
Kemudian dengan mensubtitusi persamaan (6) dan (7) ke persamaan (5) akan kita dapatkan besar gaya normal N.
𝑁 = 𝑚2 𝐿(�̇�2 sin 𝜃 − �̈�cos 𝜃) + (𝑚1 +𝑚2)𝑔
𝑁 = 𝑚2 𝐿 ((4(𝑚1 +𝑚2)𝑔
(3𝑚2 + 4𝑚1)𝐿) (1
2) − (
2√3(𝑚1 +𝑚2)[5𝑚2 + 4𝑚1]𝑔
(3𝑚2 + 4𝑚1)2𝐿) (1
2√3))
+ (𝑚1 +𝑚2)𝑔
𝑁 = 𝑚1𝑔 (1 +𝑚2(12𝑚1 + 11𝑚2)
(3𝑚2 + 4𝑚1)2)
OSN Fisika 2016 Number 3
DUA BUAH SILINDER YANG SALING BERGESEKAN Gambar di bawah menampilkan dua benda silinder tegak dengan kedua sumbunya parallel satu sama lain dan mula-mula secara terpisah masing-masing silinder tersebut sedang berotasi (spinning) ke arah yang sama dengan kecepatan sudut 𝜔0. Kedua silinder tersebut kemudian secara perlahan di sentuhkan satu sama lain sehingga pada awalnya keduanya saling mengalami sliding dengan gaya normal konstan 𝑁. Koefisien gesek antara permukaan-permukaan kedua silinder adalah 𝜇. Diketahui silinder dengan jari-jari 𝑅1 memiliki momen inersia 𝐼1 dan silinder dengan jari-jari 𝑅2 memiliki momen inersia 𝐼2.
a. Gambarkan gaya-gaya yang bekerja pada kedua silinder . Tuliskan persamaan gerak (hukum kedua Newton tentang rotasi) untuk masing-masing silinder!
𝜔0
𝜔0 𝜇
𝑅1
𝐼1
𝑅2
𝐼2 𝑁 𝑁
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 12
b. Tentukan syarat/kondisi agar kedua permukaan silinder berhenti untuk tidak mengalami sliding pada saat/waktu 𝑡 = 𝑡𝑎 . Tentukan nilai 𝑡𝑎 tersebut. Tentukan kecepatan sudut akhir kedua silinder , yaitu 𝜔1𝑎 dan 𝜔2𝑎!
Sekarang anggap kedua silinder bermassa sama, yaitu M. Silinder pertama merupakan silinder pejal dengan jari-jari 𝑅1 = 2𝑅 dan silinder kedua merupakan silinder kosong berdinding tipis dengan jari-jari 𝑅2 = 𝑅.
c. Tuliskan momen inersia masing-masing silinder! d. Tentukan kecepatan sudut masing-masing silinder sebagai fungsi waktu t, yaitu 𝜔1(𝑡)
dan 𝜔2(𝑡)! Gambarkan sketsa grafik 𝜔1(𝑡) dan 𝜔2(𝑡)! e. Tentukan energi yang hilang akibat kedua silinder bergesekan!
Pembahasan :
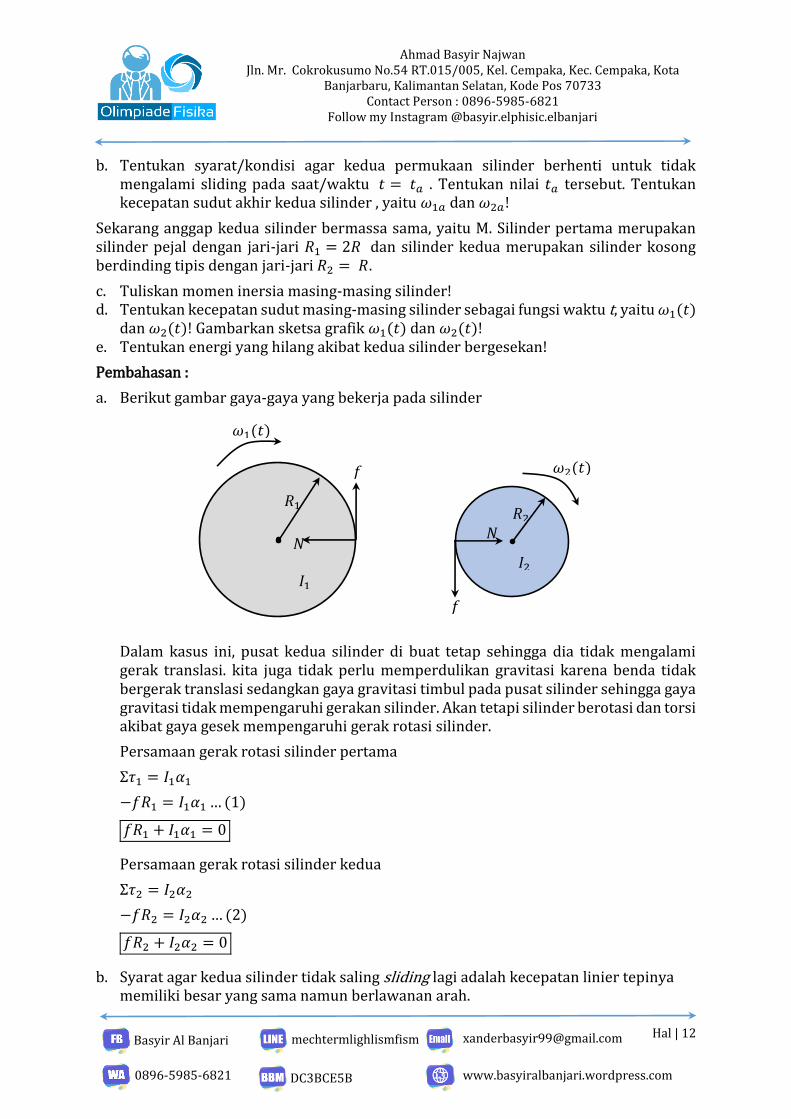
a. Berikut gambar gaya-gaya yang bekerja pada silinder
Dalam kasus ini, pusat kedua silinder di buat tetap sehingga dia tidak mengalami gerak translasi. kita juga tidak perlu memperdulikan gravitasi karena benda tidak bergerak translasi sedangkan gaya gravitasi timbul pada pusat silinder sehingga gaya gravitasi tidak mempengaruhi gerakan silinder. Akan tetapi silinder berotasi dan torsi akibat gaya gesek mempengaruhi gerak rotasi silinder.
Persamaan gerak rotasi silinder pertama
Σ𝜏1 = 𝐼1𝛼1
−𝑓𝑅1 = 𝐼1𝛼1…(1)
𝑓𝑅1 + 𝐼1𝛼1 = 0
Persamaan gerak rotasi silinder kedua
Σ𝜏2 = 𝐼2𝛼2
−𝑓𝑅2 = 𝐼2𝛼2…(2)
𝑓𝑅2 + 𝐼2𝛼2 = 0
b. Syarat agar kedua silinder tidak saling sliding lagi adalah kecepatan linier tepinya memiliki besar yang sama namun berlawanan arah.
𝑓
𝑓
𝑅2
𝐼2
𝑁
𝜔2(𝑡)
𝜔1(𝑡)
𝑅1
𝑁
𝐼1

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 13
𝑣1 = −𝑣2
𝜔1𝑎𝑅1 = −𝜔2𝑎𝑅2⟹𝜔2𝑎 = −𝑅1𝑅2𝜔1𝑎…(3)
Silinder berhenti sliding setelah selang waktu 𝑡𝑎, maka perlambatan sudut kedua silinder adalah
Silinder pertama
𝛼1 =𝜔1𝑎 − 𝜔0
𝑡𝑎…(4)
Silinder kedua
𝛼2 =𝜔2𝑎 − 𝜔0
𝑡𝑎…(5)
Subtitusi persamaan (4) ke (1) dan persamaan (5) ke (2) kemudian eliminasi variable f.
−𝑓𝑅1 = 𝐼1𝜔1𝑎 − 𝜔0
𝑡𝑎⟹ 𝑓 = −𝐼1
𝜔1𝑎 − 𝜔0𝑅1𝑡𝑎
−𝑓𝑅2 = 𝐼2𝜔2𝑎 − 𝜔0
𝑡𝑎⟹ 𝑓 = −𝐼2
𝜔2𝑎 − 𝜔0𝑅2𝑡𝑎
−𝐼1𝜔1𝑎 − 𝜔0𝑅1𝑡𝑎
= −𝐼2𝜔2𝑎 − 𝜔0𝑅2𝑡𝑎
𝐼1𝜔1𝑎 − 𝜔0𝑅1𝑡𝑎
= 𝐼2𝜔2𝑎 − 𝜔0𝑅2𝑡𝑎
…(6)
Kemudian subtitusi persamaan (3) ke (6)
𝐼1𝜔1𝑎 − 𝜔0𝑅1
= 𝐼2
(−𝑅1𝑅2𝜔1𝑎) − 𝜔0
𝑅2
𝜔1𝑎 − 𝜔0 = −𝐼2𝐼1(𝑅1𝑅2)2
𝜔1𝑎 −𝐼2𝐼1
𝑅1𝑅2𝜔0
𝜔1𝑎 +𝐼2𝐼1(𝑅1𝑅2)2
𝜔1𝑎 = 𝜔0 −𝐼2𝐼1
𝑅1𝑅2𝜔0
𝜔1𝑎 [1 +𝐼2𝐼1(𝑅1𝑅2)2
] = 𝜔0 (1 −𝐼2𝐼1
𝑅1𝑅2)
𝜔1𝑎 =1 −
𝐼2𝐼1
𝑅1𝑅2
1 +𝐼2𝐼1(𝑅1𝑅2)2𝜔0| 𝑑𝑖 𝑘𝑎𝑙𝑖 𝑑𝑒𝑛𝑔𝑎𝑛
𝐼1𝑅22
𝐼1𝑅22
𝜔1𝑎 =𝐼1𝑅2
2 − 𝐼2𝑅1𝑅2
𝐼1𝑅22 + 𝐼2𝑅1
2 𝜔0…(7)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 14
Kemudian subtitusi (7) ke (3)
𝜔2𝑎 = −𝑅1𝑅2(𝐼1𝑅2
2 − 𝐼2𝑅1𝑅2
𝐼1𝑅22 + 𝐼2𝑅1
2 𝜔0)
𝜔2𝑎 = −𝐼1𝑅1𝑅2 − 𝐼2𝑅1
2
𝐼1𝑅22 + 𝐼2𝑅1
2 𝜔0…(8)
Selanjutnya untuk menghitung waktu 𝑡𝑎 kita akan menggunakan persamaan impuls sudut sama dengan perubahan momentum sudut. Kita hanya perlu meninjau salah satu silinder, di sini saya akan meninjau silinder pertama. Karena silinder slip, gaya gesek yang bekerja adalah gaya gesek kinetik dan besarnya adalah 𝑓 = 𝜇𝑁.
𝐼𝑠 = Δ𝐿
−𝑓𝑅1𝑡𝑎 = 𝐼1(𝜔1𝑎 − 𝜔0)
𝑡𝑎 =𝐼1(𝜔0 − 𝜔1𝑎)
𝜇𝑁𝑅1
𝑡𝑎 =
𝐼1(𝜔0 −𝐼1𝑅2
2 − 𝐼2𝑅1𝑅2𝐼1𝑅2
2 + 𝐼2𝑅12 𝜔0)
𝜇𝑁𝑅1
𝑡𝑎 =
𝐼1𝜔0(𝐼1𝑅22 − 𝐼1𝑅2
2⏟
0
+ 𝐼2𝑅12 − 𝐼2𝑅1𝑅2)
𝜇𝑁𝑅1(𝐼1𝑅22 + 𝐼2𝑅1
2)
𝑡𝑎 =𝐼1𝐼2(𝑅1 − 𝑅2)
𝜇𝑁(𝐼1𝑅22 + 𝐼2𝑅1
2)𝜔0
Sehingga kita dapatkanlah syarat dan nilai waktu 𝑡𝑎 yaitu
Syarat atau kondisi saat silinder berhenti sliding adalah saat kecepatan liner tepinya sama
besar namun berlawanan arah
𝑣1 = −𝑣2
Dan besar waktu 𝑡𝑎 adalah
𝑡𝑎 =𝐼1𝐼2(𝑅1 − 𝑅2)
𝜇𝑁(𝐼1𝑅22 + 𝐼2𝑅1
2)𝜔0
c. Berikutnya kita akan menghitung momen inersia masing-masing silinder
Silinder pertama
Silinder yang pertama adalah silinder pejal sehingga momen inersianya adalah
𝐼1 =1
2𝑀𝑅1
2 =1
2𝑀(2𝑅)2 = 2𝑀𝑅2 ⟹ 𝐼1 = 2𝑀𝑅
2
Silinder kedua

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 15
Silinder yang kedua adalah silinder kosong yang berdinding tipis. Dalam hal ini saya menafsirkan silinder tersebut adalah silinder tanpa tutup dan dindingnya tipis sehingga momen inersianya adalah
𝐼2 = 𝑀𝑅12 = 𝑀(𝑅)2 = 𝑀𝑅2 ⟹ 𝐼2 = 𝑀𝑅
2
d. Perlambatan sudut kedua silinder hanya dipengaruhi oleh torsi penghambatnya, torsi penghambat hanya di pengaruhi oleh gaya gesek, dan gaya gesek hanya dipengaruhi oleh gaya normal. Karena gaya normalnya konstan maka perlambatan sudutnya konstan. Oleh karena perlambatannya konstan maka silinder akan mengalami Gerak Melingkar Berubah Beraturan Diperlambat.
Persamaan gerak untuk silinder pertama
𝜔1(𝑡) = 𝜔0 − 𝛼1𝑡
Dengan mensubtitusi nilai 𝑓 = 𝜇𝑁 ke persmaan (1) akan kita dapatkan 𝛼1 = 𝜇𝑁𝑅1 𝐼1⁄ . Kemudian kita subtitusikan ke persamaan kecepatan sudut di atas sehingga kita dapatkan.
𝜔1(𝑡) = 𝜔0 −𝜇𝑁𝑅1𝐼1
𝑡
Persamaan gerak untuk silinder kedua
𝜔2(𝑡) = 𝜔0 − 𝛼2𝑡
Dengan mensubtitusi nilai 𝑓 = 𝜇𝑁 ke persmaan (1) akan kita dapatkan 𝛼2 =𝜇𝑁𝑅2 𝐼2⁄ . Kemudian kita subtitusikan ke persamaan kecepatan sudut di atas sehingga kita dapatkan.
𝜔2(𝑡) = 𝜔0 −𝜇𝑁𝑅2𝐼2
𝑡
Dengan mensubtitusikan nilai momen inersia silinder ke kecepatan sudut akhirnya akan kita dapatkan bahwa kecepatan sudut akhir kedua silinder atau kecepatan sudut setelah selang waktu 𝑡𝑎 adalah nol(𝜔1𝑎 = 𝜔2𝑎 = 0). Silahkan anda buktikan sendiri!
Berikut grafik kecepatan sudut kedua silinder terhadap waktu.
𝑡𝑎
𝜔0
𝑡
𝜔2(𝑡)
𝑡𝑎
𝜔0
𝑡
𝜔1(𝑡)
Silinder pertama Silinder kedua

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 16
e. Besar energi yang hilang bisa kita hitung dengan mengurangi energy awal dengan energy akhir.
Δ𝐸 = 𝐸𝑎𝑤𝑎𝑙 − 𝐸𝑎𝑘ℎ𝑖𝑟
Δ𝐸 =1
2𝐼1𝜔0
2 +1
2𝐼2𝜔0
2 − 0, energi akhir bernilai nol karena silinder diam.
Δ𝐸 =1
22𝑀𝑅2𝜔0
2 +1
2𝑀𝑅2𝜔0
2
Δ𝐸 =3
2𝑀𝑅2𝜔0
2
OSN Fisika 2016 Number 4
OSILASI SISTEM PELAT DAN GAS IDEAL Terdapat tiga buah plat dengan luas penampang 𝐴 tersusun seperti gambar di bawah (tampak atas). Plat tengah memiliki muatan listrik yang terdistribusi merata sebesar 𝑄 dan ia bisa bergerak bebas tanpa gesekan ke kanan dan ke kiri, sedangkan plat disebelah kiri dan kanan dihubungkan ke ground dan fix (diam). Pada kondisi awal, plat tengah tepat berada pada jarak 𝐿 dari plat kanan maupun kiri. Pada kedua ruangan yang dibentuk di sisi kanan dan kiri terdapat udara (anggap permitivitasnya sama dengan ruang hampa = 𝜀0) yang memiliki tekanan masing-masing sebesar 𝑃0. Kondisi ini merupakan kondisi dimana plat tengah berada pada kondisi kesetimbangan labil. Anggap tidak ada celah yang mengakibatkan udara di sebelah kanan dan kiri saling mengalir atau pun keluar dari system.
Tentukanlah :
a. Dimana plat mengalami kondisi kesetimbangan stabil (𝑥𝑠) dihitung dari posisi plat pada kondisi kesetimbangan labil.
b. Jika pada posisi kesetimbangan stabil tersebut, plat tengah diganggu dengan simpangan ∆𝑥 ( dimana ∆𝑥 << 𝑥𝑠 dan ∆𝑥 << 𝐿), maka tentukan frekuensi osilasi plat tengah! (Hint : konsep termodinamika tidak dibutuhkan untuk menyelesaikan soal ini)
Plat Tengah
L L
Q

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 17
Pembahasan :
a. Sekarang kita tinjau saat plat tengah berada pada kondisi kestimbangan stabil, yaitu kondisi saat dia bergeser sejauh 𝑥𝑠 ke kanan ataupun ke kiri dari kondisi kesetimbangan labil. Sekarang untuk mempermudah analisis kita ambil simpangan ke kanan. Tidak ada alasan khusus mengenai pengambilan keputusan ini. Jika kita memilih tersimpang ke kanan pun hasilnya akan tetap sama. Perhatikan gambar di bawah ini!
Ketiga keping membentuk 2 kapasitor plat sejajar dengan kapasitas masing-masing 𝐶𝑅 dan 𝐶𝐿 . Maksud dari indeks 𝑅 dan 𝐿 pada tekanan dan kapasitansi adalah kanan(right) dan Kiri(left). Kapasitas suatu kapasitor keping sejajar adalah 𝐶 =𝜀𝑜𝐴 𝑑⁄ . Maka kapasitas total kapasitor adalah
𝐶 = 𝐶𝐿 + 𝐶𝑅
𝐶 =𝜀𝑜𝐴
𝐿 + 𝑥𝑠+
𝜀𝑜𝐴
𝐿 − 𝑥𝑠=𝜀𝑜𝐴(𝐿 − 𝑥𝑠 + 𝐿 + 𝑥𝑠)
(𝐿 + 𝑥𝑠)(𝐿 − 𝑥𝑠)⟹ 𝐶 =
2𝜀𝑜𝐴𝐿
𝐿2 − 𝑥𝑠2
Energi potensial listrik pada kapasitor adalah
𝑈 =𝑄2
2𝐶=𝑄2(𝐿2 − 𝑥𝑠
2)
4𝜀𝑜𝐴𝐿
Maka gaya elektrostatis yang bekerja pada pelat adalah
𝐹𝑒 = −𝑑𝑈
𝑑𝑥𝑠= −
𝑑
𝑑𝑥𝑠(𝑄2(𝐿2 − 𝑥𝑠
2)
4𝜀𝑜𝐴𝐿) =
𝑄2𝑥𝑠2𝜀𝑜𝐴𝐿
⟹ 𝐹𝑒 =𝑄2𝑥𝑠2𝜀𝑜𝐴𝐿
Gaya elektrostatis inilah yang membuat plat tengah mencapai kesetimbangan stabil. Arah gaya ini adalah searah dengan arah geseran plat tengah. Karena plat tengah bergeser ke kanan, maka gaya ini juga berarah ke kanan dan besarnya bergantung pada besar pergeseran plat. Selanjutnya untuk mencapai keadaan seimbang harus
𝑥𝑠
Plat Tengah
v 𝐿 − 𝑥𝑠 𝐿 + 𝑥𝑠
Q 𝑃𝐿 𝑃𝑅

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 18
ada gaya yang arahnya berlawanan dengan gaya elektrostatis ini. Gaya ini akan diakibatkan oleh perbedaan tekanan antara ruang di sebelah kanan dan kiri plat tengah. Kita sebut sebagai gaya tekanan dan saya beri indeks P.
Sebelum menghitung gaya ini kita harus mengetahui tekanan masing-masing ruang. Karena plat tengah adalah konduktor yang baik, maka kalor dapat mengalir dengan baik antar ruangan. Ini berarti tidak aka nada perbedaan temperature antara kedua ruang sehingga proses yang terjadi adalah isothermal. Selanjutnya menggunakan hukum Boyle kita bisa mendapatkan tekanan kedua ruangan dengan mempertimbangkan keadaan awal system.
Tekanan ruangan kiri
𝑃0𝑉0 = 𝑃𝐿𝑉𝐿
𝑃0𝐴𝐿 = 𝑃𝐿𝐴(𝐿 + 𝑥𝑠) ⟹ 𝑃𝐿 = 𝑃0𝐿
𝐿 + 𝑥𝑠
Tekanan ruangan kanan
𝑃0𝑉0 = 𝑃𝑅𝑉𝑅
𝑃0𝐴𝐿 = 𝑃𝑅𝐴(𝐿 − 𝑥𝑠) ⟹ 𝑃𝑅 = 𝑃0𝐿
𝐿 − 𝑥𝑠
Gaya tekanan akibat perbedaan tekanan kedua ruang adalah
𝐹𝑃 = (𝑃𝑅 − 𝑃𝐿)𝐴
𝐹𝑃 = (𝑃0𝐿
𝐿 − 𝑥𝑠− 𝑃0
𝐿
𝐿 + 𝑥𝑠)𝐴 = 𝑃𝑜𝐴𝐿 (
𝐿 + 𝑥𝑠 − 𝐿 + 𝑥𝑠(𝐿 + 𝑥𝑠)(𝐿 − 𝑥𝑠)
)
𝐹𝑃 =2𝑃𝑜𝐴𝐿𝑥𝑠𝐿2 − 𝑥𝑠2
Pada kondisi ini arah gaya tekanan ini adalah ke kiri. Saat plat tengah berada dalam keadaan kesetimbangan stabil gaya tekanan ini sama dengan gaya elektrostatis.
𝐹𝑃 = 𝐹𝑒
2𝑃0𝐴𝐿𝑥𝑠𝐿2 − 𝑥𝑠2
=𝑄2𝑥𝑠2𝜀𝑜𝐴𝐿
2𝑃0𝐴𝐿
𝐿2 − 𝑥𝑠2=
𝑄2
2𝜀𝑜𝐴𝐿… ini akan berguna nantinya…kita sebut sebagai (∗)
(2𝜀0𝐴𝐿)(2𝑃0𝐴𝐿) = 𝑄2(𝐿2 − 𝑥𝑠
2)
4𝜀0𝑃0𝐴2𝐿2 = 𝑄2𝐿2 − 𝑄2𝑥𝑠
2
𝑄2𝑥𝑠2 = 𝐿2(𝑄2 − 4𝜀0𝑃0𝐴
2)
𝑥𝑠2
𝐿2= 1 −
4𝜀0𝑃0𝐴2
𝑄2…(∗∗)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 19
𝑥𝑠 = ±𝐿√1 −4𝜀0𝑃0𝐴2
𝑄2
Tanda plus minus menadakan titik kesetimbangan berada di sebelah kanan atau kiri kesetimbangan labil. Jika kita ambil posisi kesetimbangan labil sebagai titik pusat, maka posisi kesetimbangan stabil berada pada posisi 𝑥𝑠, dimana nilainya adalah
𝑥𝑠 = 𝐿√1 −4𝜀0𝑃0𝐴
2
𝑄2
b. Sekarang plat tengah disimpangkan sejauh ∆𝑥 dari posisi kesetimbangan stabilnya. Kita asumsikan simpangan berarah ke kanan, karena kalaupun pada arah sebaliknya hasilnya akan tetap sama. Ini hanya untuk memudahkan analisis kita, maka kita pilih kondisi yang paling ideal untuk di tinjau.
Perhatikan gambar di bawah!
Karena plat tengah di simpangkan ke kanan, dia akan mengalami percepatan yang berarah ke kiri. Dengan hukum dua newton akan kita dapatkan
Σ𝐹 = 𝑚𝑎
𝐹𝑃′ − 𝐹𝑒
′ = 𝑚𝑎
Sekarang gaya yang bekerja pada plat sedikit berubah karena pergesarannya berubah dari 𝑥𝑠 menjadi 𝑥𝑠 + Δ𝑥. Sehingga gayanya sekarang menjadi bertambah besar. Berikutnya percepatan plat berarah ke kiri sedangkan simpangan ke kanan, maka turunan kedua simpangan terhadap waktu atau percepatan osilasi juga berarah ke kanan. Besarnya sama dengan percepatan plat namanun berlainan arah maka akan berlaku
𝑎
𝑥𝑠 ∆𝑥
Plat Tengah
v 𝐿 − 𝑥𝑠 − ∆𝑥 𝑄
𝐿 + 𝑥𝑠 + ∆𝑥
𝑃𝐿 𝑃𝑅

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 20
𝑎 = −𝑑2Δ𝑥
𝑑𝑡2
Kembali ke hukum dua newton. Dengan memasukkan nilai gaya tekanan dan gaya elektrostatis serta hubungan percepatan plat dengan turunan kedua simpangan terhadap waktu akan kita dapatkan
𝐹𝑃′ − 𝐹𝑒
′ = 𝑚𝑎
2𝑃0𝐴𝐿(𝑥𝑠 + Δ𝑥)
𝐿2 − (𝑥𝑠 + Δ𝑥)2−𝑄2(𝑥𝑠 + Δ𝑥)
2𝜀0𝐴𝐿= −𝑚
𝑑2Δ𝑥
𝑑𝑡2
Kita ingat kembali dari (*) bahwa
2𝑃0𝐴𝐿
𝐿2 − 𝑥𝑠2=
𝑄2
2𝜀0𝐴𝐿⟹ 2𝑃0𝐴𝐿 =
𝑄2
2𝜀0𝐴𝐿(𝐿2 − 𝑥𝑠
2)
Maka akan kita dapatkan
𝑄2
2𝜀𝑜𝐴𝐿(𝐿2 − 𝑥𝑠
2)(𝑥𝑠 + Δ𝑥)
𝐿2 − (𝑥𝑠 + Δ𝑥)2−𝑄2(𝑥𝑠 + Δ𝑥)
2𝜀0𝐴𝐿= −𝑚
𝑑2Δ𝑥
𝑑𝑡2
𝑑2Δ𝑥
𝑑𝑡2+𝑄2(𝑥𝑠 + Δ𝑥)
2𝑚𝜀0𝐴𝐿(
(𝐿2 − 𝑥𝑠2)
𝐿2 − (𝑥𝑠 + Δ𝑥)2− 1) = 0
Karena Δ𝑥 ≪ 𝑥𝑠 , maka (𝑥𝑠 + Δ𝑥)2 = 𝑥𝑠
2 + 2𝑥𝑠Δ𝑥 + Δ𝑥2 ≈ 𝑥𝑠
2 + 2𝑥𝑠Δ𝑥
𝑑2Δ𝑥
𝑑𝑡2+𝑄2(𝑥𝑠 + Δ𝑥)
2𝑚𝜀0𝐴𝐿(
𝐿2 − 𝑥𝑠2
𝐿2 − 𝑥𝑠2 − 2𝑥𝑠Δ𝑥− 1) ≈ 0
𝑑2Δ𝑥
𝑑𝑡2+𝑄2(𝑥𝑠 + Δ𝑥)
2𝑚𝜀0𝐴𝐿(
𝐿2 − 𝑥𝑠2
𝐿2 − 𝑥𝑠2 (1 −2𝑥𝑠Δ𝑥𝐿2 − 𝑥𝑠2
)− 1) ≈ 0
𝑑2Δ𝑥
𝑑𝑡2+𝑄2(𝑥𝑠 + Δ𝑥)
2𝑚𝜀0𝐴𝐿(
𝐿2 − 𝑥𝑠2
(𝐿2 − 𝑥𝑠2) (1 −2𝑥𝑠Δ𝑥𝐿2 − 𝑥𝑠2
)− 1) ≈ 0
𝑑2Δ𝑥
𝑑𝑡2+𝑄2(𝑥𝑠 + Δ𝑥)
2𝑚𝜀0𝐴𝐿((1 −
2𝑥𝑠Δ𝑥
𝐿2 − 𝑥𝑠2)−1
− 1) ≈ 0
Berikutnya gunakan pendekatan 𝑥𝑠 + Δ𝑥 ≈ 𝑥𝑠 kemudian menggunakan pendekatan binomial newton akan kita dapatkan yaitu untuk suku
(1 −2𝑥𝑠Δ𝑥
𝐿2 − 𝑥𝑠2)−1
≈ 1 +2𝑥𝑠Δ𝑥
𝐿2 − 𝑥𝑠2
Pendekatan binomial newton adalah untuk bentuk (1 + 𝑥)𝑛 ≈ 1 + 𝑛𝑥, ini berlaku jika 𝑥 ≪ 1. Sedangkan kita ketahui dari soal bahwa Δ𝑥 ≪ 𝑥𝑠 dan Δ𝑥 ≪ 𝐿, maka 2𝑥𝑠Δ𝑥 (𝐿2 − 𝑥𝑠
2)⁄ ≪ 1, sehingga pendekatan ini bisa berlaku. Persamaan gerak plat tengah menjadi

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 21
𝑑2Δ𝑥
𝑑𝑡2+
𝑄2𝑥𝑠2𝑚𝜀0𝐴𝐿
(1 +2𝑥𝑠Δ𝑥
𝐿2 − 𝑥𝑠2− 1) ≈ 0
𝑑2Δ𝑥
𝑑𝑡2+
𝑄2𝑥𝑠2
𝑚𝜀0𝐴𝐿(𝐿2 − 𝑥𝑠2)⏟ 𝜔2
Δ𝑥 ≈ 0
Sehingga frekuensi sudutnya adalah
𝜔 = √𝑄2𝑥𝑠2
𝑚𝜀0𝐴𝐿(𝐿2 − 𝑥𝑠2)= 𝑄√
1
𝑚𝜀0𝐴𝐿(𝐿2 𝑥𝑠2⁄ − 1 )
Dengan mengingat kembali persamaan (**) yaitu
𝑥𝑠2
𝐿2= 1 −
4𝜀0𝑃0𝐴2
𝑄2⟹
𝐿2
𝑥𝑠2=
𝑄2
𝑄2 − 4𝜀0𝑃0𝐴2
Kemudian kita subtitusikan ke frekuensi sudut osilasi plat tengah akan didapatkan
𝜔 = 𝑄√
1
𝑚𝜀0𝐴𝐿 (𝑄2
𝑄2 − 4𝜀𝑜𝑃𝑜𝐴2− 1 )
= 𝑄√
1
𝑚𝜀0𝐴𝐿 (𝑄2 − 𝑄2 + 4𝜀0𝑃0𝐴2
𝑄2 − 4𝜀0𝑃0𝐴2 )
𝜔 = 𝑄√𝑄2 − 4𝜀0𝑃0𝐴2
4𝑃0𝑚𝜀02𝐴3𝐿
Akhirnya kita dapatkan frekuensi osilasi plat tengah yaitu
𝑓 =𝜔
2𝜋⟹ 𝑓 =
𝑄
2𝜋√𝑄2 − 4𝜀0𝑃0𝐴2
4𝑃0𝑚𝜀02𝐴3𝐿

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 22
OSN Fisika 2016 Number 5
BOLA BASKET MEMANTUL Sebuah bola basket berjari-jari 𝑟 (anggap saja bola berongga), dilempar oleh seseorang dengan kecepatan horizontal 𝑣0 dan kecepatan sudut 𝜔0 (dimana 𝜔0𝑟 < 𝑣0) dari ketinggian ℎ (lihat gambar). Bola basket tersebut memantul secara vertikal pada lantai dengan koefisien pantul 𝑒. Namun sebelum memantul, bola tersebut bergerak slip dengan waktu yang singkat. Koefisien gesek antara bola dan lantai adalah 𝜇. Tepat ketika bola mulai menggelinding sempurna, ia memantul dan membuat gerak parabola.
Tentukan :
a. Sudut pantul (𝜃) yang terbentuk tepat sesaat bola menggelinding sempurna. b. Jumlah putaran (𝑛) yang dialami bola tersebut selama bersentuhan dengan lantai. c. Jarak total (𝑥) yang ditempuh bola hingga menyelesaikan gerak parabolanya.
PEMBAHASAN :
a. Perhatikan gambar di bawah.
Pertama kita lihat dulu gerakan bola dari awal sampai mencapai titik A. kita tahu dari GLBB bahwa kecepatan vertical bola basket saat sampai di bawah adalah 𝑣𝑦 =
−√2𝑔ℎ (tanda negative menandakan arahnya ke bawah). Kemudian dia memantul
𝜃
𝑣0
𝑥
…
ℎ
𝜔0
𝑣𝐶𝑥
𝜇𝑚𝑔
𝑂
𝑣
𝐷 𝐶 𝐵 𝐴
𝑣𝐴𝑥
𝑣𝐴𝑦
𝑣𝑦
𝜃
𝑣0
𝜔0
ℎ
…
𝑥
𝜔
𝑟
𝑣𝐵𝑦
𝑣𝐵𝑥
𝑣𝐶𝑦

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 23
dan kita ketahui bahwa koefisien restitusinya adalah e maka kecepatan vertical
pantulannya adalah 𝑣𝐴𝑦 = 𝑒√2𝑔ℎ. Kenapa seperti ini akan kita buktikan. Dalam hal
ini tumbukan terjadi antara lantai dan bola basket dan tumbukan hanya terjadi pada arah vertical. Missal bola basket adalah benda pertama dan lantai adalah bola kedua. Kita menetapkan bahwa arah ke atas adalah positif. kecepatan benda pertama
sebelum dan sesudah tumbukan adalah 𝑣1 = 𝑣𝑦 = −√2𝑔ℎ dan 𝑣1′ = 𝑣𝐴𝑦. Sedangkan
kecepatan benda kedua sebelum dan sesudah tumbukan adalah nol, 𝑣2 = 𝑣2′ = 0,
karena lantai senantiasa diam. Maka berdasarkan rumus koefisien restitusi akan kita dapatkan
𝑒 = −𝑣2′ − 𝑣1
′
𝑣2 − 𝑣1
𝑒 = −0 − 𝑣𝐴𝑦
0 − (−√2𝑔ℎ)⟹ 𝑣𝐴𝑦 = 𝑒√2𝑔ℎ
𝑣𝐴𝑦 ini adalah juga kecepatan vertikal di titik B, 𝑣𝐵𝑦 = 𝑣𝐴𝑦 karena interaksi dengan
gaya gesek tidak mempengaruhi gerakan arah vertikalnya. Kecepatan horizontal saat sampai di titik adalah 𝑣𝐴𝑥 = 𝑣0. Bola akan melompat kembali ketika mulai menggelinding tanpa slip. Selama slip, karena 𝜔0𝑟 < 𝑣0, akan ada gerak relatif antara permukaan lantai dan bola basket maka akan timbul gaya gesek yang berarah ke kiri. Gaya gesek ini akan memperlambat kecepatan linier dan mempercepat kecepatan sudut bola basket. Dengan menerapkan hukum dua newton pada arah horizontal akan kita dapatkan −𝜇𝑚𝑔 = 𝑚𝑎 sehingga kita dapatkan perlambatan liniernya adalah 𝑎 =−𝜇𝑔. Kemudian dengan meninjau grak rotasinya akan kita dapatkan pula 𝑓𝑟 = 𝐼𝛼. Bola basket adalah bola berongga sehingga momen inersianya adalah 𝐼 = 2 3⁄ 𝑚𝑟2.
𝜇𝑚𝑔𝑟 =2
3𝑚𝑟2𝛼 ⟹ 𝛼 =
3𝜇𝑔
2𝑟
Persamaan gerak bola basket untuk gerak lurus dan melingkar akan menjadi
𝑣 = 𝑣0 − 𝜇𝑔𝑡
𝜔 = 𝜔0 + 3𝜇𝑔
2𝑟𝑡
Saat sudah bergerak tanpa slip, yaitu setelah selang waktu T, kecepatan liner bola basket menjadi 𝑣 = 𝑣𝐵𝑥 dan kecepatan sudutnya adalah 𝜔 = 𝜔𝐵 Syarat yang harus dipenuhi saat bola basket mulai menggelinding tanpa slip adalah 𝑣 = 𝜔𝑟 atau 𝑣𝐵𝑥 =𝜔𝐵𝑟.
𝑣0 − 𝜇𝑔𝑇 = 𝜔0𝑟 +3𝜇𝑔
2𝑇
𝑣0 − 𝜔0𝑟 =5𝜇𝑔
2𝑇 ⟹ 𝑇 =
2(𝑣0 − 𝜔0𝑟)
5𝜇𝑔
Dengan mensubtitusi nilai T ke dalam persamaan gerak akan kita dapatkan

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 24
𝑣𝐵𝑥 = 𝑣0 − 𝜇𝑔 (2(𝑣0 − 𝜔0𝑟)
5𝜇𝑔) ⟹ 𝑣𝐵𝑥 =
3𝑣0 + 2𝜔0𝑟
5
𝜔𝐵 =𝑣𝐵𝑥𝑟⟹ 𝜔𝐵 =
3𝑣0 + 2𝜔0𝑟
5𝑟
Di titik B ini bola melompat kembali dan memiliki kecepatan arah horizontal 𝑣𝐵𝑥 dan kecepatan vertical 𝑣𝐵𝑦 sehingga dia mengalami gerak parabola. Sudut elevasinya
adalah
tan 𝜃 =𝑣𝐵𝑦
𝑣𝐵𝑥=
𝑒√2𝑔ℎ
3𝑣0 + 2𝜔0𝑟5
=5𝑒√2𝑔ℎ
3𝑣0 + 2𝜔0𝑟
𝜃 = arctan (5𝑒√2𝑔ℎ
3𝑣0 + 2𝜔0𝑟)
b. Untuk mengetahui jumlah putaran bola 𝑛 kita harus terlebih dahulu menentukan jarak yang ditempuh bola dari titik A ke titik B kemudian membaginya dengan keliling bola. Karena perlambatan bola konstan, dia mengalami Gerak Lurus Berubah Beraturan Diperlambat. Sehingga jarak tempuhnya adalah
𝑠 = 𝑣0𝑡 −1
2𝜇𝑔𝑡2
𝑥𝐴𝐵 = 𝑣0𝑇 −1
2𝜇𝑔𝑇2
𝑥𝐴𝐵 = 𝑣02(𝑣0 −𝜔0𝑟)
5𝜇𝑔−1
2𝜇𝑔 (
2(𝑣0 − 𝜔0𝑟)
5𝜇𝑔)
2
𝑥𝐴𝐵 =2𝑣0
2 − 2𝑣0𝜔0𝑟
5𝜇𝑔−1
2
4(𝑣02 + 𝜔0
2𝑟2 − 2𝑣0𝜔0𝑟)
25𝜇𝑔
𝑥𝐴𝐵 =20𝑣0
2 − 20𝑣0𝜔0𝑟 − 4𝑣02 − 4𝜔0
2𝑟2 + 8𝑣0𝜔0𝑟
50𝜇𝑔
𝑥𝐴𝐵 =16𝑣0
2 − 12𝜔0𝑟 − 4𝜔02𝑟2
50𝜇𝑔
𝑥𝐴𝐵 =8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
25𝜇𝑔
Maka jumlah putarannya adalah
𝑛 =𝑥𝐴𝐵2𝜋𝑟
=8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
50𝜋𝜇𝑔𝑟
𝑛 =8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
50𝜋𝜇𝑔𝑟

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 25
c. Jarak x bisa kita dapatkan dengan menjumlahkan jarak OA, AB, dan BD.
𝑥𝑂𝐴 = 𝑣0√2ℎ
𝑔
Dari mana ini didapatkan? Ini didapatkan dari gerak parabola bola basket dari posisi
awalnya sampai mencapai titik A. Waktu untuk mencapai titik A adalah 𝑡𝑂𝐴 = √2ℎ 𝑔⁄ , dan kecepatan horizontalnya konstan yaitu 𝑣0. Sehingga jarak OA adalah seperti di atas.
Kita sudah mengetahui bahwa jarak AB adalah
𝑥𝐴𝐵 =8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
25𝜇𝑔
Selanjutnya bola akan terus memantul sambil melakukan gerak parabola. Karena bola sudah menggelinding tanpa slip, gaya gesek tidak bekerja lagi pada bola dan kecepatan arah horizontalnya akan tetap yaitu 𝑣𝑥 = 𝑣𝐵𝑥 = 3𝑣0 + 2𝜔0𝑟 5⁄ . Jadi kita tinggal mencari waktu total sampai bola berhenti.
Kita sebut pantulan di B sebagai pantulan pertama, C sebagai pantulan kedua dan seterusnya sampai titik terjauh yaitu D. waktu pantulan pertama dan kedua adalah
𝑡12 =2𝑣𝐵𝑦
𝑔⟹ 𝑡12 = 2𝑒√
2ℎ
𝑔
Dengan cara yang sama seperti pada kasus A, kecepatan vertical sebelum pantulan di
titik C adalah 𝑣𝐶𝑦0 = −𝑒√2𝑔ℎ dan setelah memantul kecepatannya menjadi 𝑣𝐶𝑦 =
−𝑒𝑣𝐶𝑦0 = 𝑒2√2𝑔ℎ. Sehingga waktu antara pantulan kedua dan ketiga adalah
𝑡23 =2𝑣𝐶𝑦
𝑔⟹ 𝑡23 = 2𝑒
2√2ℎ
𝑔
Begitupun untuk waktu antara pantulan ketiga dan keempat dan seterusnya
𝑡34 = 2𝑒3√2ℎ
𝑔, 𝑡45 = 2𝑒
4√2ℎ
𝑔,…
Maka waktu total dari titik B sampai titik terakhir bola berhenti bergerak adalah
𝑡𝐵𝐷 = 𝑡12 + 𝑡23 + 𝑡34 + 𝑡45 +⋯
𝑡𝐵𝐷 = 2𝑒√2ℎ
𝑔+ 2𝑒2√
2ℎ
𝑔+ 2𝑒3√
2ℎ
𝑔+ 2𝑒4√
2ℎ
𝑔+⋯

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 26
𝑡𝐵𝐷 = 2𝑒√2ℎ
𝑔(1 + 𝑒 + 𝑒2 + 𝑒3 +⋯)
(1 + 𝑒 + 𝑒2 + 𝑒3 +⋯) adalah deret geometri tak hingga konvergen Karena rasionya, 𝑟 = 𝑒 < 1. Dengan menggunakan rumus jumlah geometri tak hingga yang konvergen akan kita dapatkan
(1 + 𝑒 + 𝑒2 + 𝑒3 +⋯) =1
1 − 𝑒
𝑡𝐵𝐷 = 2𝑒√2ℎ
𝑔(1
1 − 𝑒) ⟹ 𝑡𝐵𝐷 =
2𝑒
1 − 𝑒√2ℎ
𝑔
Maka jarak dari B ke D adalah
𝑥𝐵𝐷 = 𝑣𝑥𝑡𝐵𝐷 =3𝑣0 + 2𝜔0𝑟
5(2𝑒
1 − 𝑒√2ℎ
𝑔)
Sehingga jarak total yang ditempuh bola basket adalah
𝑥 = 𝑥𝑂𝐴 + 𝑥𝐴𝐵 + 𝑥𝐵𝐷
𝑥 = 𝑣0√2ℎ
𝑔+8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
25𝜇𝑔+3𝑣0 + 2𝜔0𝑟
5(2𝑒
1 − 𝑒√2ℎ
𝑔)
𝑥 = (𝑣0 +2𝑒(3𝑣0 + 2𝜔0𝑟)
5(1 − 𝑒))√
2ℎ
𝑔+8𝑣0
2 − 6𝑣0𝜔0𝑟 − 2𝜔02𝑟2
25𝜇𝑔