agonists and antagonists apc t cell agonist peptide apc t cell antagonist peptide agonist peptide...
TRANSCRIPT
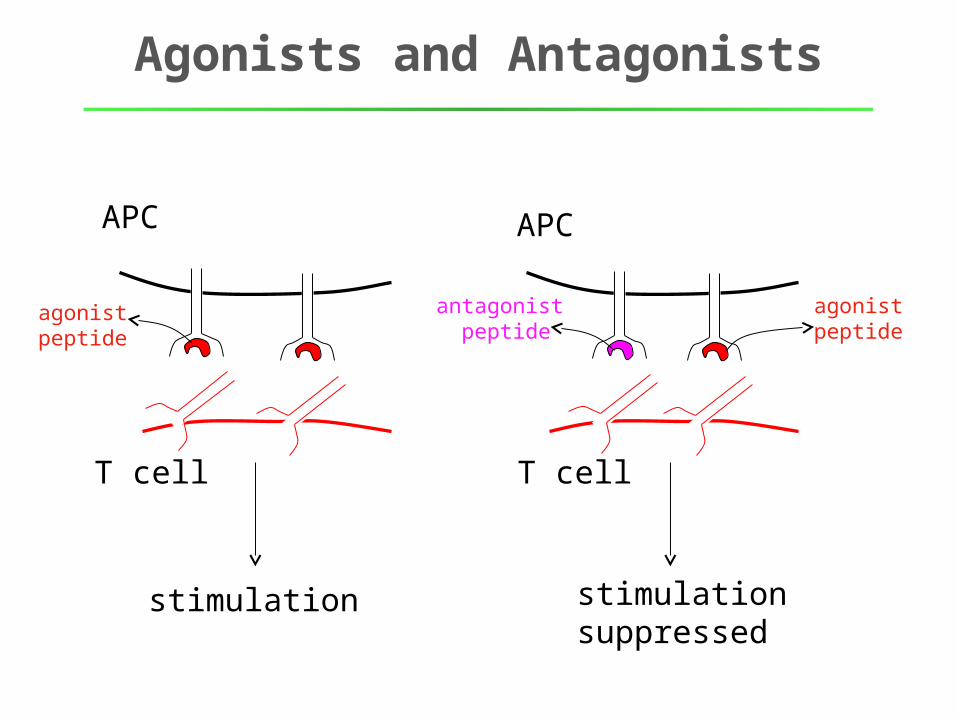
Agonists and Antagonists
APC
T cell
agonistpeptide
APC
T cell
antagonist peptide
agonistpeptide
stimulation stimulationsuppressed
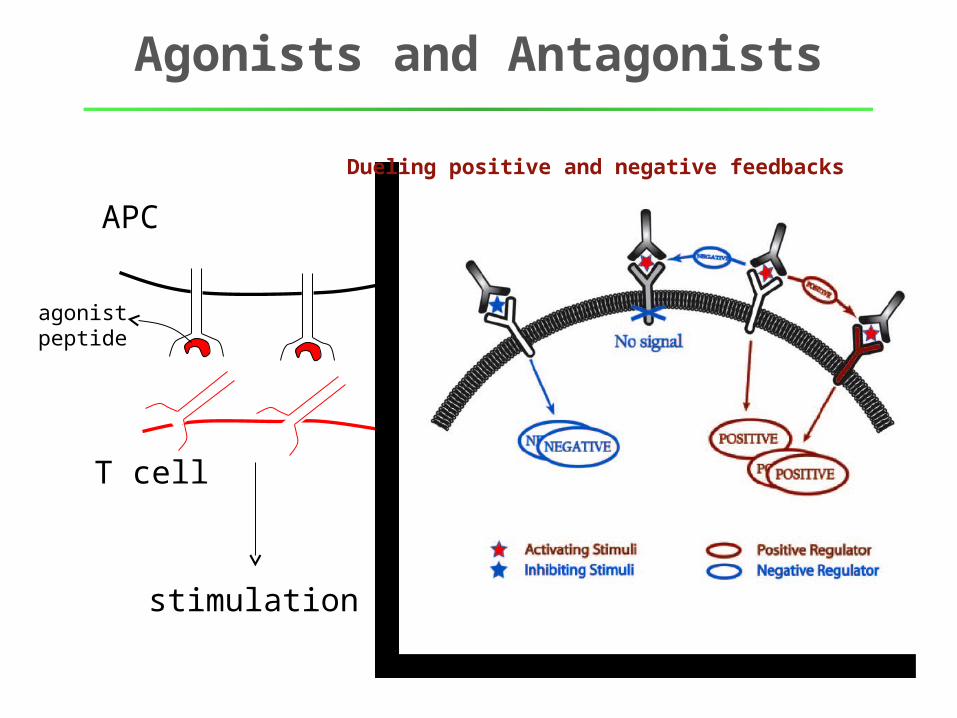
Agonists and Antagonists
APC
T cell
agonistpeptide
agonistpeptide
stimulation stimulationsuppressed
Dueling positive and negative feedbacks
Agonists and Antagonists
APC
T cell
APC
agonistpeptide
stimulation stimulationsuppressed
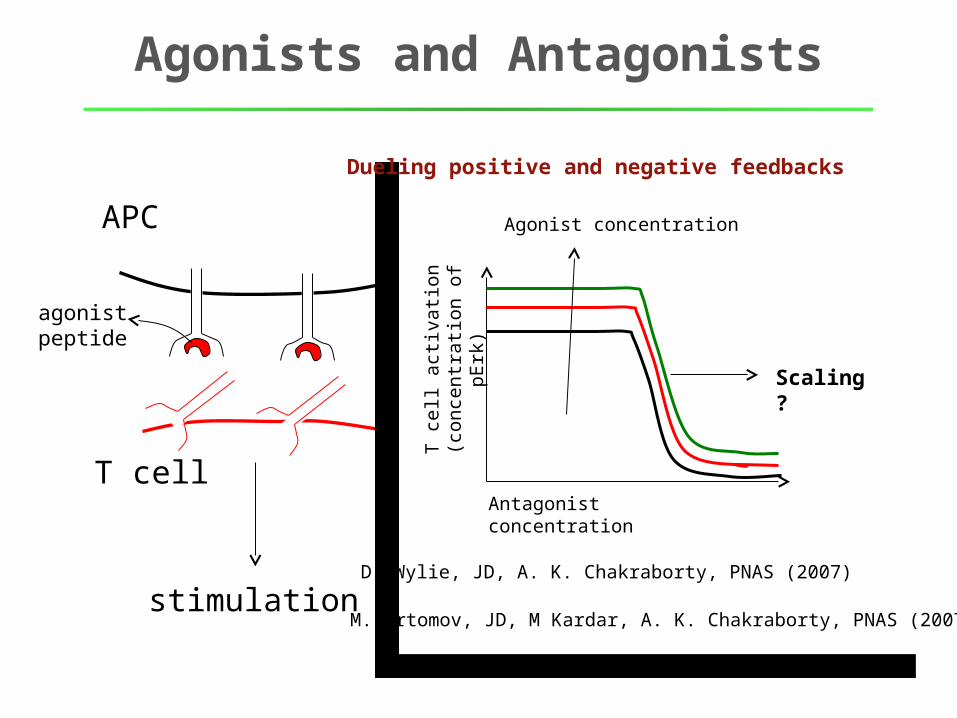
Dueling positive and negative feedbacks
T c
ell a
ctiv
atio
n(c
once
ntra
tion
of p
Erk
)
Antagonist concentration
Scaling ?
Agonist concentration
D. Wylie, JD, A. K. Chakraborty, PNAS (2007)
M. Artomov, JD, M Kardar, A. K. Chakraborty, PNAS (2007)
+ve
-ve
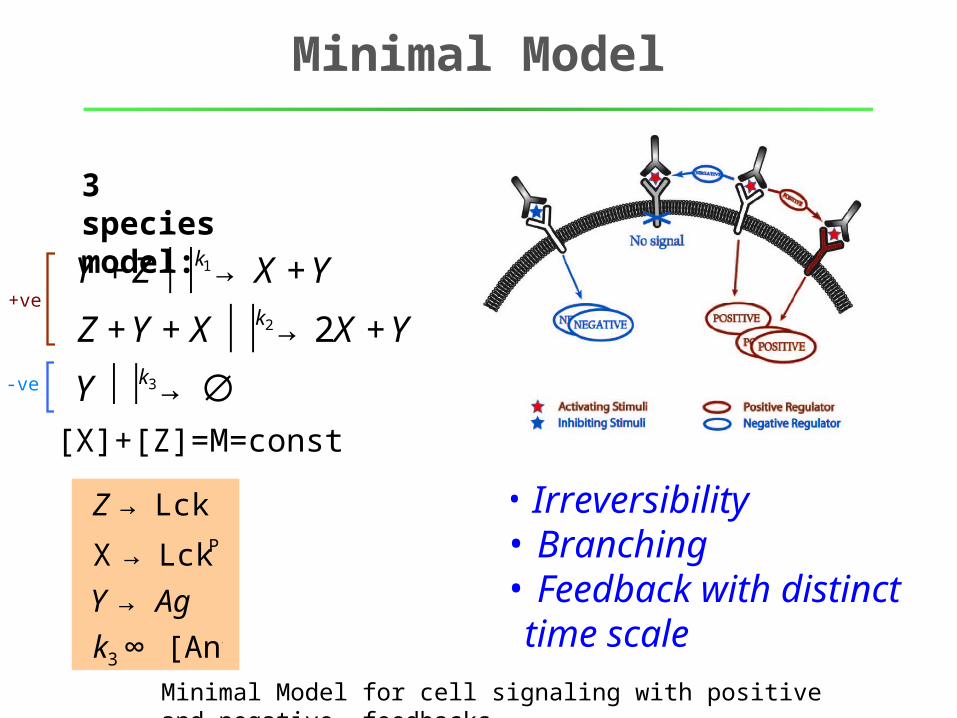
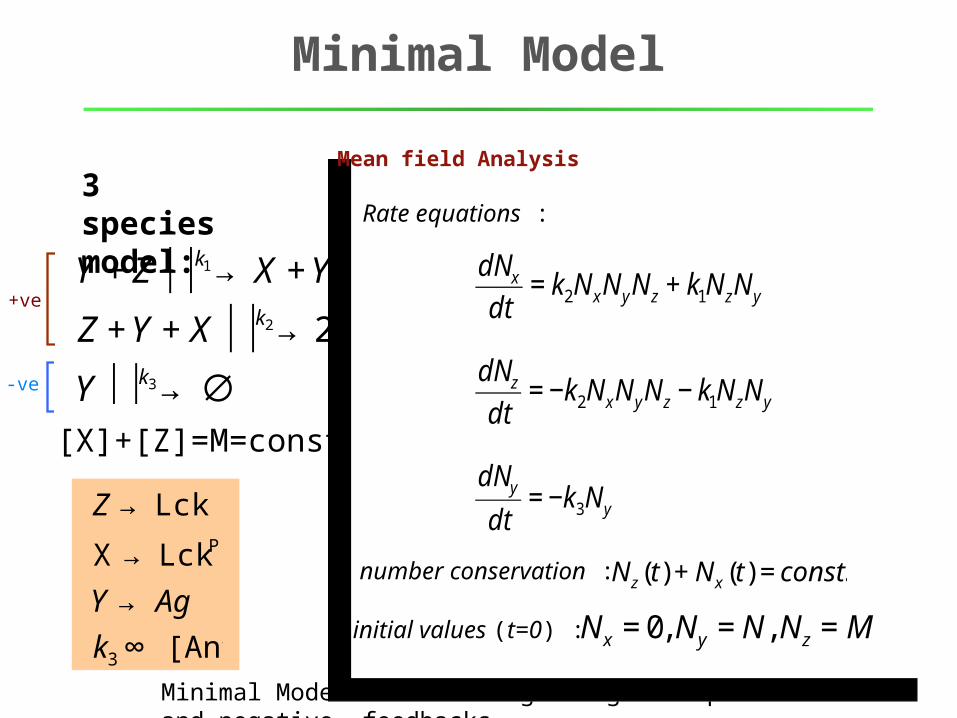
Minimal Model
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
• Irreversibility• Branching• Feedback with distinct time scale
3 species model:
€
Z → Lck
X → LckP
Y → Ag
k3 ∞ [Ant]
Minimal Model for cell signaling with positive and negative feedbacks
[X]+[Z]=M=const
+ve
-ve
Minimal Model
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
• Irreversibility• Branching• Feedback with distinct time scale
3 species model:
€
Z → Lck
X → LckP
Y → Ag
k3 ∞ [Ant]
Minimal Model for cell signaling with positive and negative feedbacks
[X]+[Z]=M=const €
dNx
dt= k2NxNyNz + k1NzNy
€
dNz
dt= −k2NxNyNz − k1NzNy
€
dNy
dt= −k3Ny
Mean field Analysis
€
Nx = 0, Ny = N, Nz = Minitial values (t=0) :
Rate equations :
€
Nz(t) + Nx (t) = const.number conservation :
+ve
-ve
Minimal Model
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
• Irreversibility• Branching• Feedback with distinct time scale
3 species model:
€
Z → Lck
X → LckP
Y → Ag
k3 ∞ [Ant]
Minimal Model for cell signaling with positive and negative feedbacks
[X]+[Z]=M=const
€
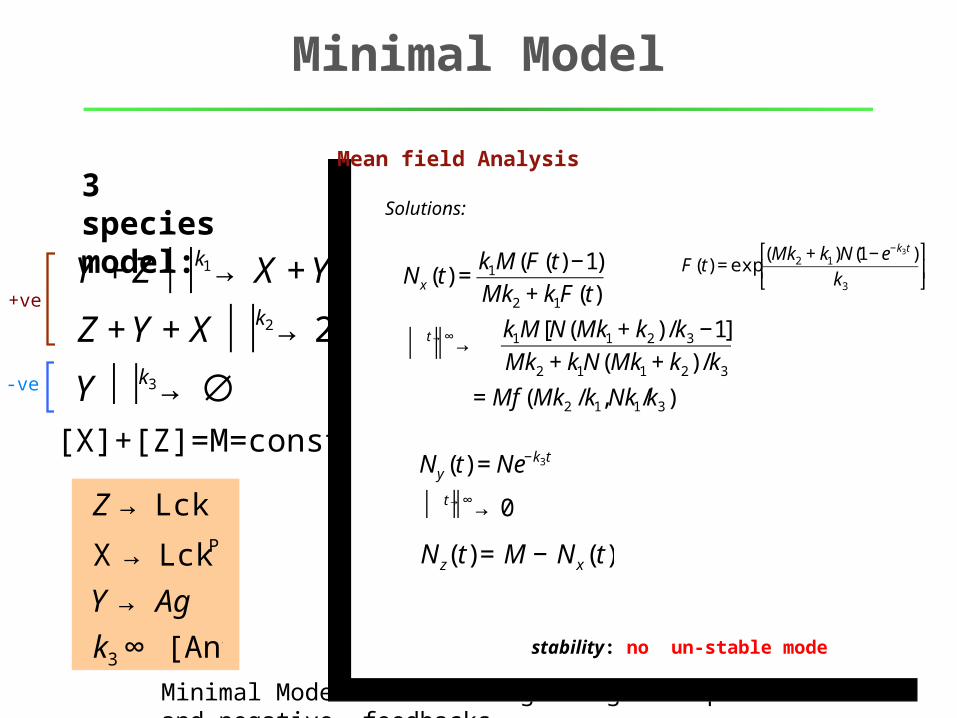
Nx (t) =k1M(F(t) −1)
Mk2 + k1F(t)
t →∞ ⏐ → ⏐ ⏐ k1M[N(Mk1 + k2) /k3 −1]
Mk2 + k1N(Mk1 + k2) /k3
= Mf (Mk2 /k1,Nk1/k3)
€
Ny (t) = Ne−k3t
t →∞ ⏐ → ⏐ ⏐ 0
€
N z( t) = M − N x(t)
€
F(t) = exp(Mk2 + k1)N(1− e−k3t )
k3
⎡
⎣ ⎢
⎤
⎦ ⎥
stability: no un-stable mode
Mean field Analysis
Solutions:
+ve
-ve
Minimal Model
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
• Irreversibility• Branching• Feedback with distinct time scale
3 species model:
€
Z → Lck
X → LckP
Y → Ag
k3 ∞ [Ant]
Minimal Model for cell signaling with positive and negative feedbacks
[X]+[Z]=M=const
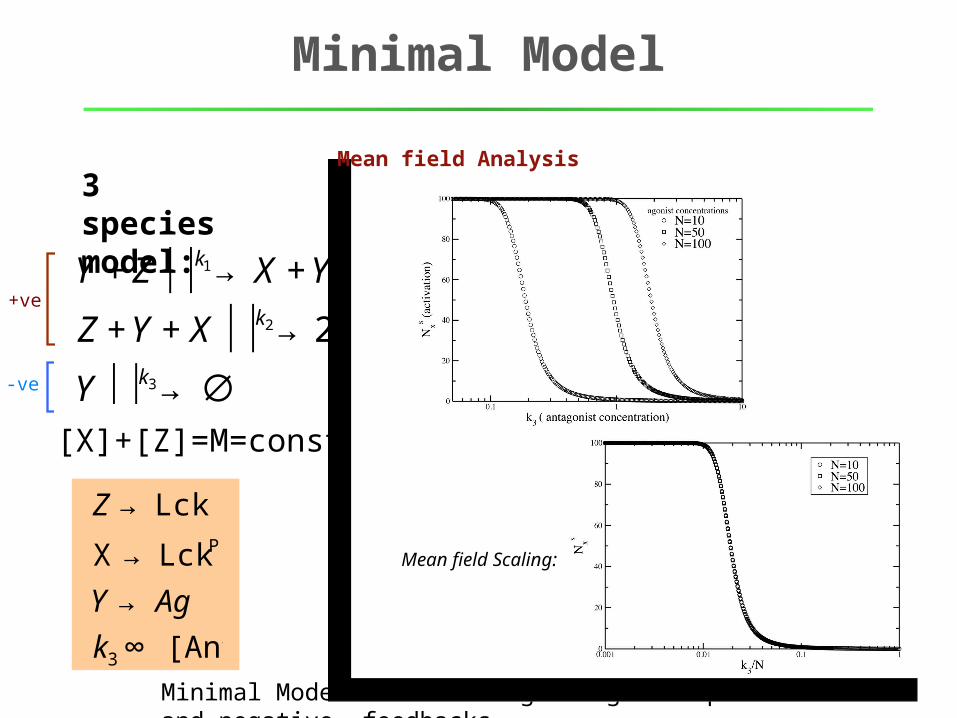
Mean field Analysis
Mean field Scaling:
+ve
-ve
Minimal Model
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
• Irreversibility• Branching• Feedback with distinct time scale
3 species model:
€
Z → Lck
X → LckP
Y → Ag
k3 ∞ [Ant]
Minimal Model for cell signaling with positive and negative feedbacks
[X]+[Z]=M=const
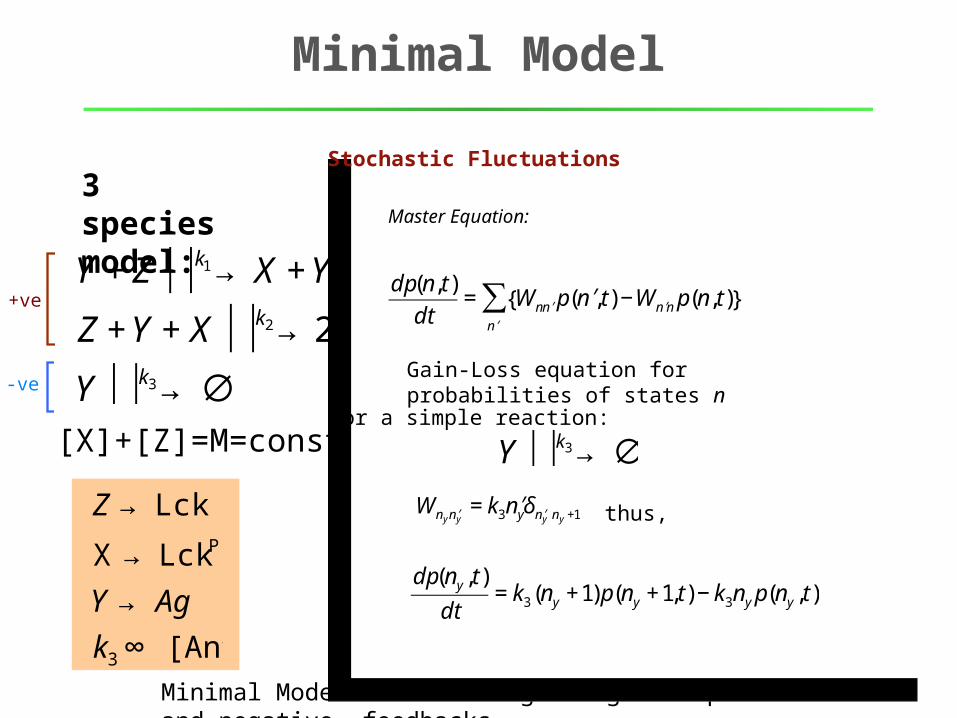
Stochastic Fluctuations
€
dp(n, t)
dt= Wn ′ n p( ′ n , t) −W ′ n n p(n, t){ }
′ n
∑
Master Equation:
Gain-Loss equation for probabilities of states n
€
Y k3 ⏐ → ⏐ ∅For a simple reaction:
€
dp(ny, t)
dt= k3(ny +1)p(ny +1, t) − k3ny p(ny, t)€
Wny ′ n y= k3 ′ n yδ ′ n y ny +1 thus,
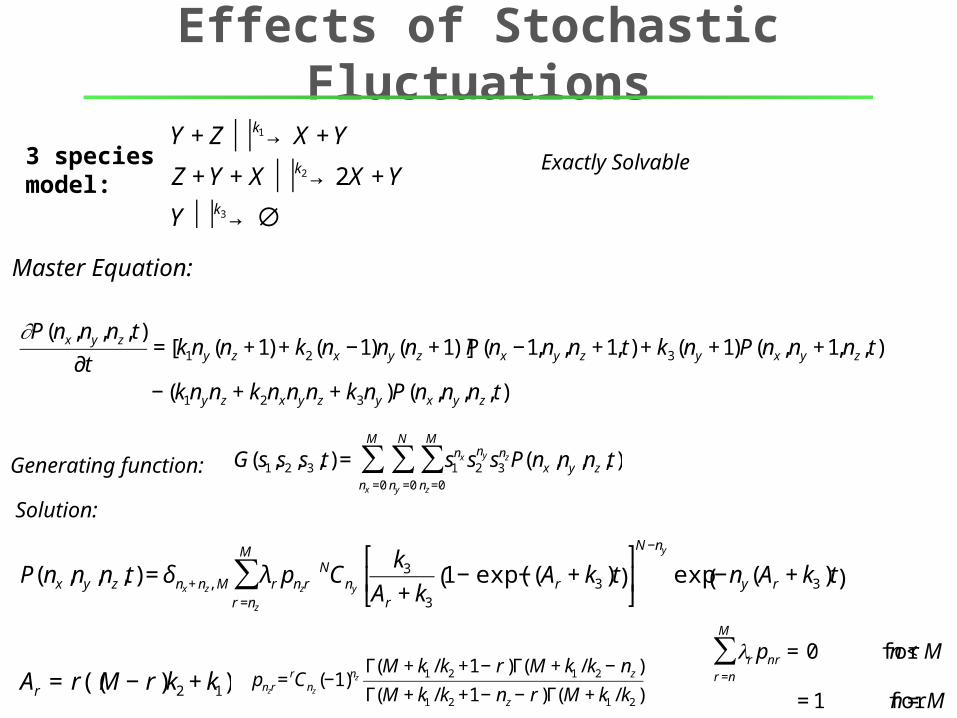
Effects of Stochastic Fluctuations
€
∂P(nx,ny,nz, t)
∂t= [k1ny (nz +1) + k2(nx −1)ny (nz +1)]P(nx −1,ny,nz +1, t) + k3(ny +1)P(nx,ny +1,nz, t)
− (k1nynz + k2nxnynz + k3ny )P(nx,ny,nz, t)
Master Equation:
Exactly Solvable
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
3 species model:
€
G(s1,s2 ,s3 ,t) = s1nx s2
ny s3nz
nz =0
M
∑ny =0
N
∑nx =0
M
∑ P(nx ,ny ,nz ,t)Generating function:
€
P(nx ,ny ,nz ,t) = δnx + nz, M λrr =nz
M
∑ pnzrNCny
k3
Ar + k3
1− exp(−(Ar + k3 )t( ) ⎡
⎣ ⎢
⎤
⎦ ⎥
N −ny
exp −ny(Ar + k3 )t( )
€
Ar = r((M − r )k2 + k1)
€
pnzr= rCnz
(−1)nzΓ(M + k1 / k2 +1− r )Γ(M + k1 / k2 − nz )
Γ(M + k1 / k2 +1− nz − r )Γ(M + k1 / k2 )
€
λr pnrr =n
M
∑ = 0 for n < M
= 1 for n = M
Solution:
Effects of Stochastic Fluctuations
€
∂P(nx,ny,nz, t)
∂t= [k1ny (nz +1) + k2(nx −1)ny (nz +1)]P(nx −1,ny,nz +1, t) + k3(ny +1)P(nx,ny +1,nz, t)
− (k1nynz + k2nxnynz + k3ny )P(nx,ny,nz, t)
Master Equation:
Exactly Solvable
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
3 species model:
€
G(s1,s2 ,s3 ,t) = s1nx s2
ny s3nz
nz =0
M
∑ny =0
N
∑nx =0
M
∑ P(nx ,ny ,nz ,t)
€
P(nx ,ny ,nz ,t) = δnx + nz, M λrr =nz
M
∑ pnzrNCny
k3
Ar + k3
1− exp(−(Ar + k3 )t( ) ⎡
⎣ ⎢
⎤
⎦ ⎥
N −ny
exp −ny(Ar + k3 )t( )
€
Ar = r((M − r )k2 + k1)
€
pnzr= rCnz
(−1)nzΓ(M + k1 / k2 +1− r )Γ(M + k1 / k2 − nz )
Γ(M + k1 / k2 +1− nz − r )Γ(M + k1 / k2 )
€
λr pnrr =n
M
∑ = 0 for n < M
= 1 for n = M
Generating function:
Solution:
[X]+[Z]=M=const
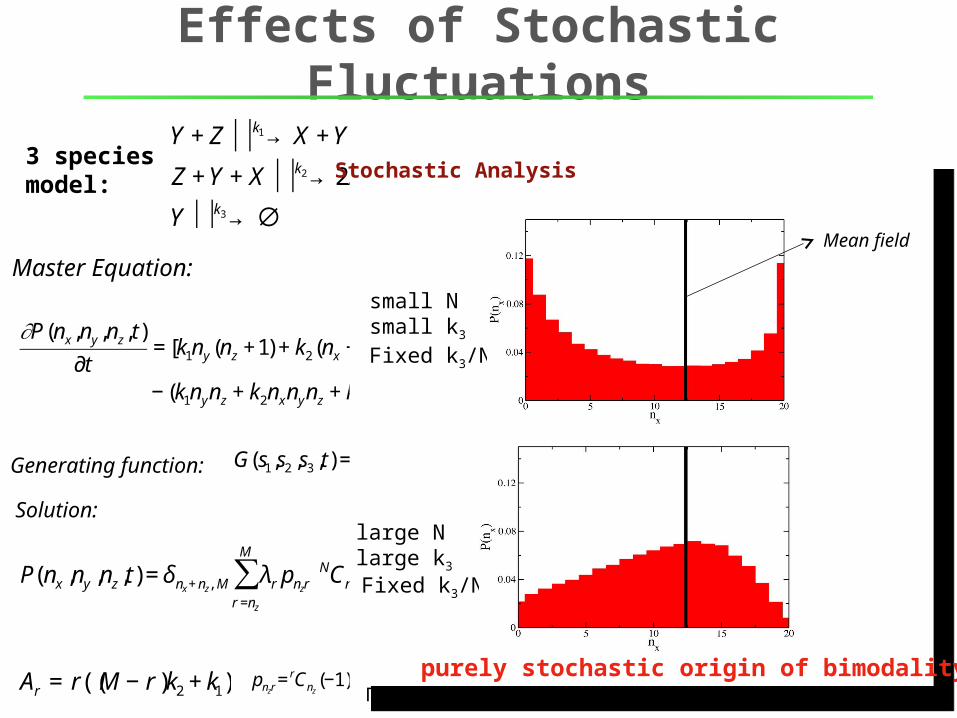
small Nsmall k3
Fixed k3/N
Stochastic Analysis
Mean field
large Nlarge k3
Fixed k3/N
purely stochastic origin of bimodality
Effects of Stochastic Fluctuations
€
∂P(nx,ny,nz, t)
∂t= [k1ny (nz +1) + k2(nx −1)ny (nz +1)]P(nx −1,ny,nz +1, t) + k3(ny +1)P(nx,ny +1,nz, t)
− (k1nynz + k2nxnynz + k3ny )P(nx,ny,nz, t)
Master Equation:
Exactly Solvable
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
3 species model:
€
G(s1,s2 ,s3 ,t) = s1nx s2
ny s3nz
nz =0
M
∑ny =0
N
∑nx =0
M
∑ P(nx ,ny ,nz ,t)
€
P(nx ,ny ,nz ,t) = δnx + nz, M λrr =nz
M
∑ pnzrNCny
k3
Ar + k3
1− exp(−(Ar + k3 )t( ) ⎡
⎣ ⎢
⎤
⎦ ⎥
N −ny
exp −ny(Ar + k3 )t( )
€
Ar = r((M − r )k2 + k1)
€
pnzr= rCnz
(−1)nzΓ(M + k1 / k2 +1− r )Γ(M + k1 / k2 − nz )
Γ(M + k1 / k2 +1− nz − r )Γ(M + k1 / k2 )
€
λr pnrr =n
M
∑ = 0 for n < M
= 1 for n = M
Generating function:
Solution:
[X]+[Z]=M=const
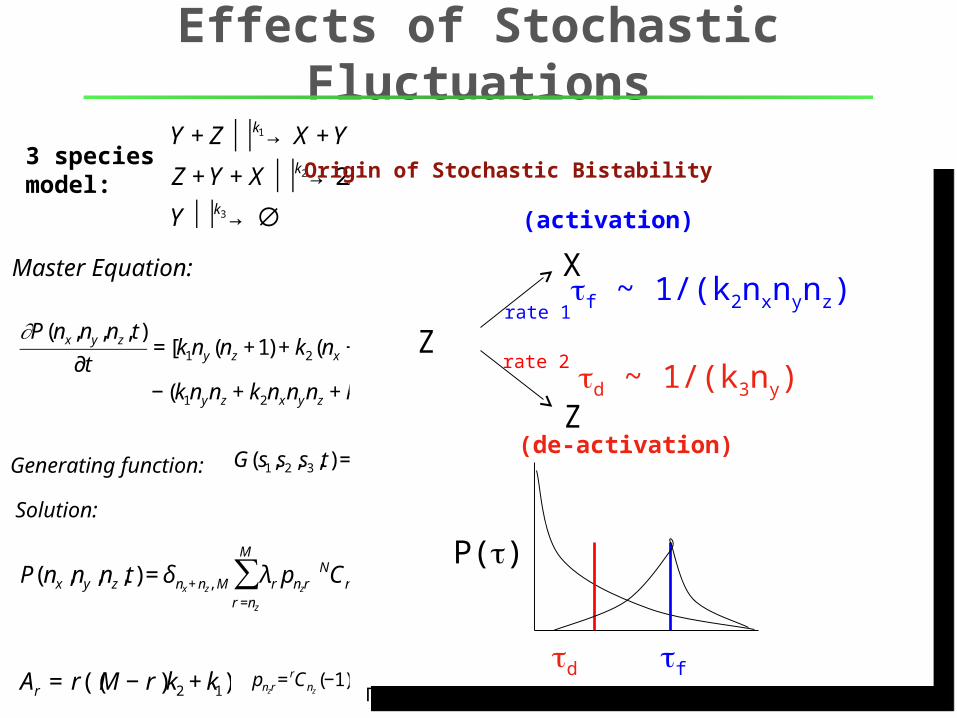
Origin of Stochastic Bistability
Z
X
rate 2
rate 1
Zd ~ 1/(k3ny)
f ~ 1/(k2nxnynz)
fd
P()
(activation)
(de-activation)
Effects of Stochastic Fluctuations
€
∂P(nx,ny,nz, t)
∂t= [k1ny (nz +1) + k2(nx −1)ny (nz +1)]P(nx −1,ny,nz +1, t) + k3(ny +1)P(nx,ny +1,nz, t)
− (k1nynz + k2nxnynz + k3ny )P(nx,ny,nz, t)
Master Equation:
€
Y + Z k1 ⏐ → ⏐ X + Y
Z + Y + X k2 ⏐ → ⏐ 2X + Y
Y k3 ⏐ → ⏐ ∅
3 species model:
€
P(nx ,ny ,nz ,t) = δnx + nz, M λrr =nz
M
∑ pnzrNCny
k3
Ar + k3
1− exp(−(Ar + k3 )t( ) ⎡
⎣ ⎢
⎤
⎦ ⎥
N −ny
exp −ny(Ar + k3 )t( )
€
Ar = r((M − r )k2 + k1)
€
pnzr= rCnz
(−1)nzΓ(M + k1 / k2 +1− r )Γ(M + k1 / k2 − nz )
Γ(M + k1 / k2 +1− nz − r )Γ(M + k1 / k2 )
€
λr pnrr =n
M
∑ = 0 for n < M
= 1 for n = M
Generating function:
Solution:
fd
P()
fd
P()
reduction of
ny and k3
fd
P()
fd
P()
reduction of
ny and k3
time, arbitrary units
reac
tion
rate
s
2 4 6 8 10
0.25
0.5
0.75
1
1.25
1.5
1.75
2
discrete partic
le numberstochasticfluctuations
[X]+[Z]=M=const
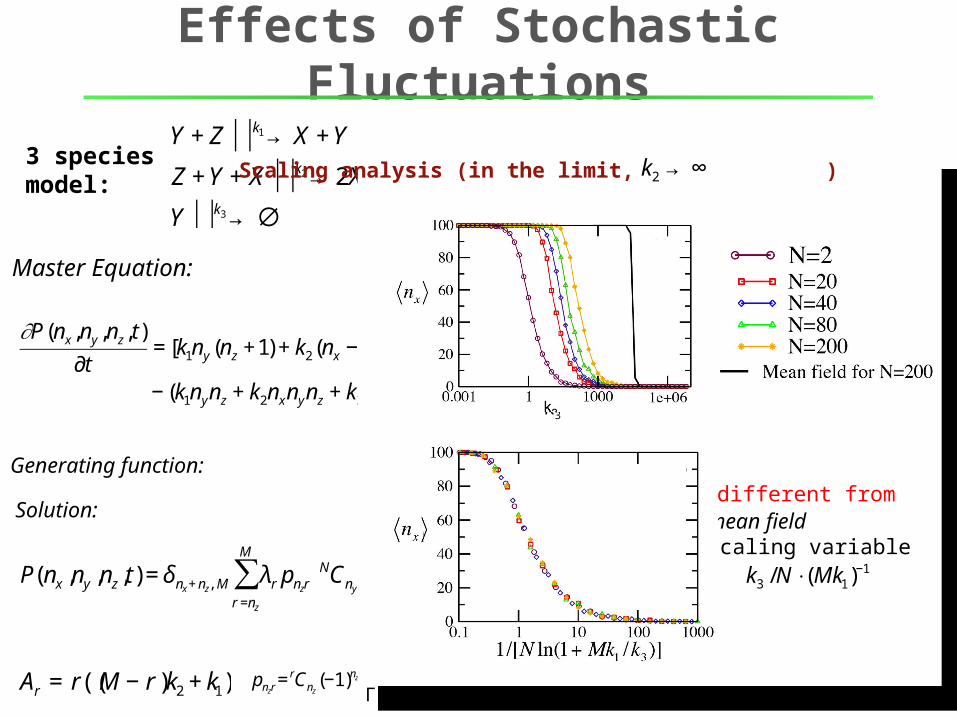
Scaling analysis (in the limit, )
k3
mean field scaling variable
€
k3 /N ⋅(Mk1)−1
different from
€
k2 → ∞
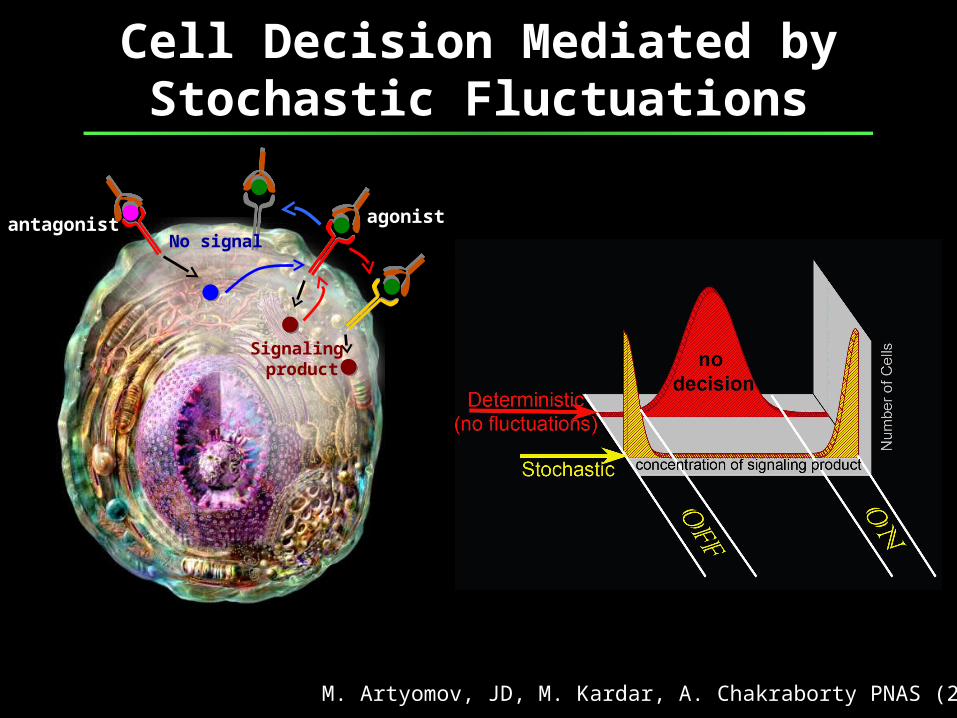
Cell Decision Mediated by Stochastic Fluctuations
agonistantagonist
Signaling product
No signal
M. Artyomov, JD, M. Kardar, A. Chakraborty PNAS (2007)