adas and fusa - nmi | connected communities · adas and fusa r green nmi s rowell avl june 2016 ....
TRANSCRIPT

Advanced Driver Assistance Systems
and Functional Safety
ADAS and FuSa
R Green NMI
S Rowell AVL June 2016
zz
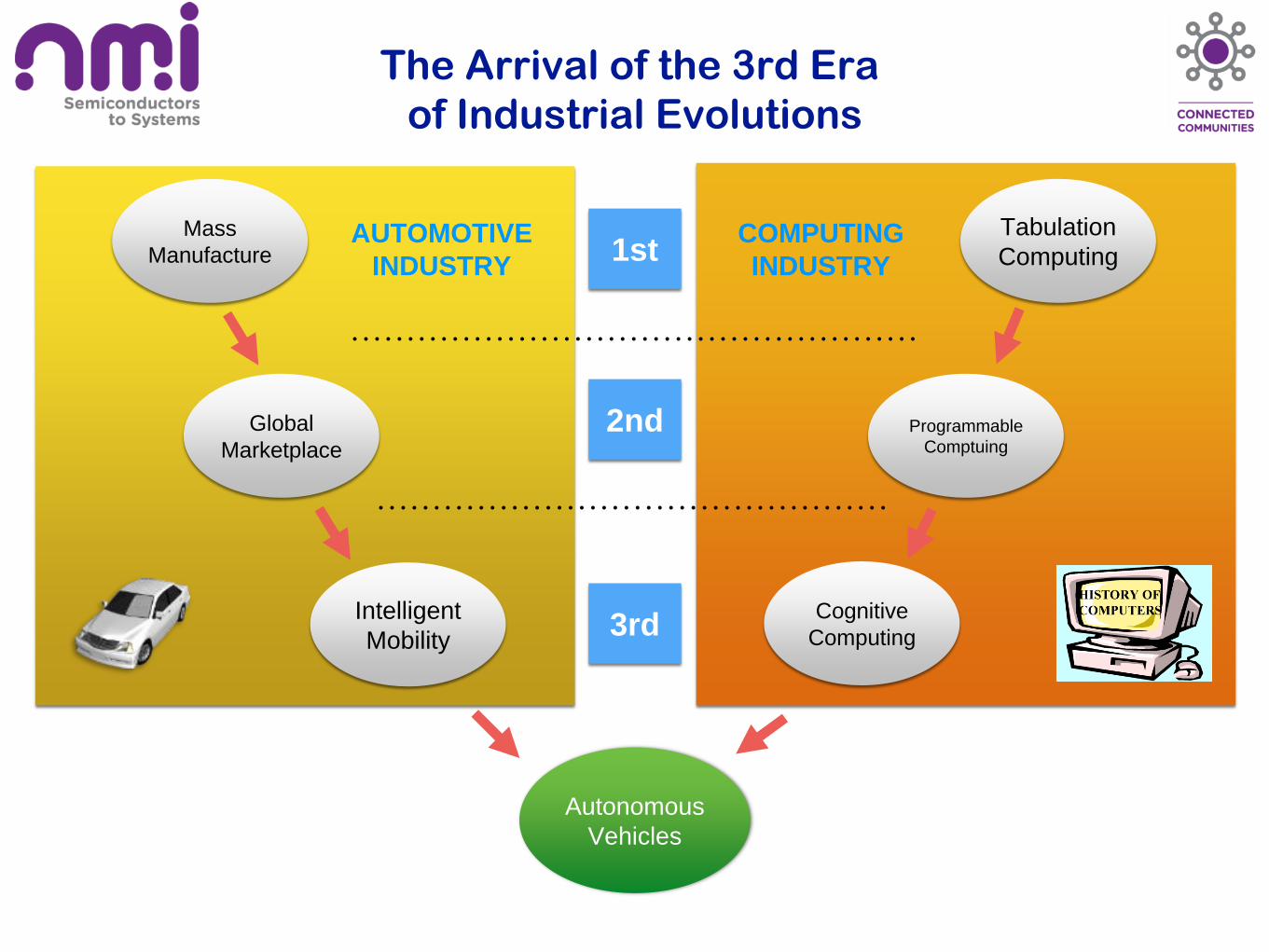
Mass
Manufacture
Programmable
Comptuing
Global
Marketplace
Autonomous
Vehicles
Tabulation
Computing
Cognitive
Computing
The Arrival of the 3rd Era
of Industrial Evolutions
Intelligent
Mobility
1st
2nd
3rd
AUTOMOTIVE
INDUSTRY
COMPUTING
INDUSTRY

3
ADAS/AD Stakeholders
Government
Transport
Body
IP and
SW
Insurance
University
Tier1
Standards
Agency
Legal
Semi
Sensor
OEM
Test
Drivers
Pedestrians
Emergency
Services
Energy
provider
Legal
Infrastructure
provider
Vehicle
Leasing
Car
Parks

4
Towards Autonomy
Capability
ADAS
Level
1 2 3 4 5
ACC
LDW
Blind
spot
PARK
ASSIST
AEB
LKA
Auton
Park

5
Towards Autonomy
Capability
ADAS
Level
1 2 3 4 5
ACC
LDW
Blind
spot
PARK
ASSIST
AEB
LKA
Auton
Park
A D
Urban
envir
Hiway
envir

6
Towards Autonomy
Capability
ADAS
Level
1 2 3 4 5
ACC
LDW
Blind
spot
PARK
ASSIST
DETECTION
PREDICTION
AEB
LKA
Auton
Park
A D
Urban
envir
Hiway
envir

7
Towards Autonomy
Capability
ADAS
Level
1 2 3 4 5
ACC
LDW
Blind
spot
PARK
ASSIST
DETECTION
PREDICTION
AEB
LKA
Auton
Park
A D
Urban
envir
Hiway
envir

8
Towards Autonomy
Capability
ADAS
Level
1 2 3 4 5
DETECTION PREDICTION
Technology
Data
Legal
Insurance
Government
Public
Ultimate Driver Control Ultimate System Control

Capabilities: Building Blocks
9
Sensor Com-Vis
Engine
Sensor
Fusion IP FuSa Security Other HMI
Virtual
Prototype
Test
Environment
Sc SW
Platform Some V2X Driver sensor
Multi
ADAS
Functions
Radar
Camera
H-free Input Image Rec HW/SW
Lidar
1G Ethernet
Function
HUD System

Enabling Autonomy from ADAS
1/ Existing capabilities will need to be
improved or enhanced
2/ New capabilities will be required
10

Capabilities: Building Blocks
11
Sensor Com-Vis
Engine
Sensor
Fusion IP FuSa Security Other HMI
Virtual
Prototype
Test
Environment
Scalable SW
Platform Some V2X Driver sensor
Autonomous
Driving
Radar
Camera
H-free input Image Rec HW/SW
Lidar
1G Ethernet
Function
HUD System
Environment
modelling
Machine
Learning
V2X
Redundancy
&
Protocols
handling
Predictive
Path
modelling
Safety
Regulation Security+
Data
Analytics

12
ADAS/AD key technical challenges
Sensor
Fusion IP
Virtual
Validation
Security
Environ
modelling
Platform
Integrator
Machine
Learning
FuSa
HW/SW
EuroNCAP

Functional Safety in Autonomous Driving
13
Design/Test Environment
• “Black Box” approach to supplier/customer unlikely to satisfy market/safety
requirements
• Continuous leading-edge development scenario
• Continuous upgrades likely
• Ongoing simulation testing
• Open structures required
• Active fail-safe mechanisms
• Built-in redundancy
• Risk assessment

Functional Safety in Autonomous Driving
14
Design/Test Environment
• “Black Box” approach to supplier/customer unlikely to satisfy market/safety
requirements
• Continuous leading-edge development scenario
• Continuous upgrades likely
• Ongoing simulation testing
• Open structures required
• Active fail-safe mechanisms
• Built-in redundancy
• Risk assessment
Collaboration on open platforms needed
Future ADAS / AD
features
Increasing complexity of
ADAS & AD
-> Increasing complexity of FuSa
Functional Safety in the Development Process

Full
Automation
Without
driver control
Full
Automation
With Driver
Control
Conditional
Automation
Partial
Automation
Functional Safety in the Development Process

Use Cases
System Level REQ
Functional Level REQ
Key Performance
Indicators FS - HARA
FS – Sys REQ
Component 1 Component 2 Component 3 Component N
Communication
(SAD, CAN signals)
Functional Safety in the Development Process
More emphasis is required on the “mis-use” case
Analysis must be of the “Safety Of The Intended Function”
Increasing
emphasis on
capturing all Use
Cases

18
Functional Safety and Autonomous Driving
The move towards more autonomous driving brings new challenges
The technical task of making a self-driving car has largely been
achieved…
Who is responsible in the
case of accidents:
Driver?
OEM?
Sensors supplier?
Road Infrastructure?
Communications?
But if things go wrong, who will be responsible?

Steering Group Considerations
1 / ADAS Application Orientation
19
ADAS/AD Steering Group
Workstream: FuSa
Workstream: Virtual prototyping
Workstream: Sensor Fusion IP
Workstream: Machine Learning

20
• Provide a focal point to drive a national strategy on ADAS/AD systems
• Support C-CAV, Auto Council and DFT in meeting its strategic vision
• Provide a value-add specialist group with deep tech knowledge
• Help build partnership
• Facilitate collaborative pilot work
• Share knowledge via an industry-led cohesive approach
The Role of AESIN Steering Group for ADAS and Autonomous Driving