accuracy of human limb moment of inertia estimations and ...€¦ · technical note journal of...
TRANSCRIPT
TECHNICAL NOTE
JOURNAL OF APPLIED BIOMECHANICS, 1996,12, 51 7-530 Q 1996 by Human Kinetics Publishers, Inc.
Accuracy of Human Limb Moment of Inertia Estimations and Their Influence
on Resultant Joint Moments
John H. Challis
Segmental moment of inertia values, which are often required to perform mechanical analyses of human movement, are commonly computed using statistical models based on cadaver data. Two sets of equations for estimating human limb moments of inertia were evaluated: linear multivariable equations and nonlinear equations. Equation co- efficients for both sets of equations were determined using the cadaver data of Chan- dler et al. (1975). Across-validation procedure was used to circumvent the problem of model evaluation when there is limited data with which to develop and evaluate the model. Moment of inertia values for the longitudinal axes were predicted with similar degrees of accuracy with either set of equations, while for the transverse axes the nonlinear equations were superior. An evaluation of the influence of the accuracy of moment of inertia estimates on resultant joint moments for three activities showed that the influence of these errors was generally small.
To mechanically analyze human movement, segmental angular momenta and re- sultant joint moments are often computed; determining these state variables requires the moments of inertia of the segments about defined axes. The moments of inertia of body segments are commonly derived using a statistical technique (e.g., Hinrichs, 1985) or by modeling the segments as geometric solids of known density (e.g., Jensen, 1978). The statistical techniques range from those where mean inertia data obtained from cadavers are scaled in a simple way to the experimental subject (e.g., Forwood, Neal, & Wilson, 1985) to those which use this same cadaver data to formulate multivariable regression equations (e.g., Hinrichs, 1985). The geometric modeling techniques represent the shapes of the body segments as geometric solids; the dimensions of these shapes are obtained by taking measurements on the experimental subjects. Density values are obtained from ca- daver data and are generally assumed to be uniform throughout the segment. The geomet- ric models vary from those which assume the body segments can be adequately modeled using a small sample of geometric solids (e.g., Hanavan, 1964) to those which use a larger set and model some body segments as a composite of more than one shape (e.g., Hatze, 1980). Imaging techniques (e.g., Mungiole & Martin, 1990) may become a source of normative data on which regression equations could be based or from which density data for geometric modeling could be obtained. Currently, the application of these techniques is restricted due to the limited availability of equipment and the time-consuming nature of
John H. Challis is with the Biomechanics Laboratory, The Pennsylvania State University, University Park, PA 16802.
518 Challis
processing procedures. These factors also preclude their use for the routine determination of body segment inertial parameters, for example, for use in clinical gait analyses.
The cadaver data of Chandler, Clauser, McConvilIe, Reynolds, and Young (1975) have been used to produce equations for determining body segment moments of inertia. Hinrichs (1985) produced linear multivariable regression equations from these data to determine moment of inertia values, while Yeadon and Morlock ( 1 989) used the same data to produce nonlinear equations. Given the paucity of accurate criterion data with which to assess anthropometric techniques, no genuine evaluation of either set of equa- tions has been performed. Hinrichs (1985) and Vaughan, Davis, and O'Connor (1992) presented R2 values, which indicate the correlation between the dependent and indepen- dent variables but do not indicate their predictive capabilities. Yeadon and Morlock (1989) attempted to evaluate their equations by determining equation coefficients for the right limb and then examining their predictive capacity on the left limb. While theirs was a novel approach, it cannot be viewed as an independent assessment procedure, due to the similarity of human limbs.
Given the problems of obtaining sufficient, accurate criterion data with which to formulate statistical models for determining body segment inertial parameters, it is diffi- cult to find additional data with which to evaluate the models. Therefore, the major pur- poses of this study are as follows:
To present a cross-validation procedure for model evaluation, which allows the data from which a statistical model is formulated to be used also for model evaluation To illustrate the use of this evaluation procedure by examining the accuracy of moment of inertia values determined for human limb segments using both linear and nonlinear statistical models
* To examine extrapolation errors due to using statistical models to estimate segmen- tal inertia values for subjects whose inertia values lie outside the range of the sample population's values To examine the influence of errors in moment of inertia values when computing resultant joint moments
Method
To assess the anthropometric techniques under investigation, it was necessary to have a suitable criterion with which to compare the computed values. Anthropometric data de- rived from cadavers are accurate but scarce. Chandler et al. (1975) determined the cen- ter of mass, segment mass, and moment of inertia about three axes, for 14 segments on 6 male subjects (body mass 50.6-89.2 kg, height 1.625-1.849 m). The moment of iner- tia data of Chandler et al. (1975) for the upper and lower limb segments were used as the criterion data in the present study. The moments of inertia were defined about three orthogonal axes through the center of mass of each segment. In addition to reporting body segment inertial parameters, Chandler et al. (1975) provided other anthropometric measurements that facilitated the formulation of equations for predicting moment of in- ertia values.
Two different sets of equations for predicting segment moment of inertia values were examined. One set was the linear equations of Hinrichs (1985) derived from the cadaver data of Chandler et al. (1975). For each body segment, Hinrichs presented two to four equations for determining moments of inertia about transverse and longitudinal axes. The general format of these equations was as follows:
Inertia Estimations
where I, = longitudinal moment of inertia, kt = linear equation coefficient, A, = some anthropometric measure (e.g., segment length or width), and IT is the transverse moment of inertia.
Chandler et al. (1975) took up to six anthropometric measures for each body seg- ment. Hinrichs computed regression equations using different combinations of these mea- sures, producing sets of equations using either one or two predictors. In this study, the equations selected for each body segment were those of Hinrichs (1985) which he re- ported to have the highest R2 value; therefore, in some cases there is one predictor in the equation and in others there are two. The regression equations of Hinrichs (1985) do not reflect how segment moment of inertia values are affected by the dimensions of the limbs (e.g., length and perimeter), although length and perimeter values were used in some of his equations. Therefore, in this study, a second set of equations was also examined that attempted to relate these pertinent physical dimensions to a segment's moments of inertia.
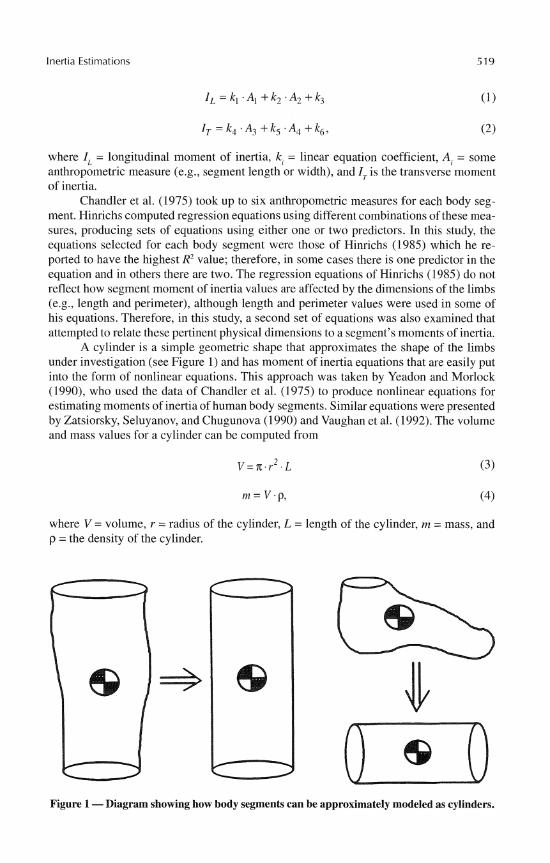
A cylinder is a simple geometric shape that approximates the shape of the limbs under investigation (see Figure 1) and has moment of inertia equations that are easily put into the form of nonlinear equations. This approach was taken by Yeadon and Morlock (1990), who used the data of Chandler et al. (1975) to produce nonlinear equations for estimating moments of inertia of human body segments. Similar equations were presented by Zatsiorsky, Seluyanov, and Chugunova (1990) and Vaughan et al. (1992). The volume and mass values for a cylinder can be computed from
where V = volume, r = radius of the cylinder, L = length of the cylinder, m = mass, and p = the density of the cylinder.
Figure 1 -Diagram showing how body segments can be approximately modeled as cylinders.

The moments of inertia for the cylinder are calculated using
Using the relationship between the circumference of a circle and its radius, it is possible to represent these equations in the form of the following nonlinear equations:
where C = circumference of the cylinder and K, and K, are constants. The constants for these nonlinear equations were determined using a least-squares
linear regression technique. Data for the right and left limbs were averaged, following the procedure of Hinrichs (1985). The moment of inertia data for two mutually perpendicular axes orthogonal to the longitudinal axis of each limb were also averaged to give one transverse moment of inertia. Human body segments are generally not circular in cross section, but the distance around the perimeter of the segment is measured; the modeling assumption is then made that this perimeter value can be used as a circumference for input to Equations 7 and 8. For the human limb segments, the circumferences were defined as follows:
Hand: mean of the perimeter around the metacarpal-phalangeal joints and the wrist perimeter
Forearm: mean of wrist, maximum forearm, and elbow perimeters
Upper a m : mean of the elbow, maximum upper arm, and axillary perimeters
Foot: mean of the perimeter of the foot around the arch, and the perimeter around the ball of the foot
Calf: mean of the knee, the maximum calf, and the ankle perimeters
Thigh: mean of the upper thigh, the midthigh, and the knee perimeters
A procedure was required with which to obtain an unbiased estimate of the error in predicting moment of inertia values using each set of equations. The mean difference between the data on which the equations were based and the value predicted using these equations will underestimate the error that will occur when these equations are used to predict moment of inertia values for a different population. This estimate of the error was performed and for all subsequent discussion is called the non-cross-validated (NCV) cri- terion. Generally, if such an assessment criterion is used, high accuracy can be obtained simply by using more coefficients in the equations. To circumvent the problem of model evaluation when there are no additional data with which to evaluate the model, Allen (1974) presented a cross-validation procedure for evaluating the predictive capacity of a statistical model using only the data with which the model was formulated. Therefore, an
Inertia Estimations 52 1
unbiased estimate of error was obtained by calculating equation coefficients for subsets of the original data set. The subset was obtained by removing one of the cadaver samples from the original data set; these removed values then served as an independent sample on which to evaluate error. By doing this sequentially for each of the six cadavers, it was possible to get six estimates of error from which a mean value was then computed; this approach was called the cross-validation criterion (CV).
The differences between calculated and true values were computed and used to determine the mean absolute percentage error:
where ME = mean absolute percentage error, n = number of values, I, = true moment of inertia value, and I, = predicted moment of inertia value.
The error introduced into moment of inertia predictions was investigated for a limb with a moment of inertia value outside of the range of the sample from which the equa- tions had been formulated. This analysis was achieved by computing both the linear and nonlinear equation coefficients using the original sample with either the largest or small- est moment of inertia value ignored; these equations were then used to estimate the largest or smallest moment of inertia value. The absolute percentage differences between the true moment of inertia value and that predicted using both linear and nonlinear equations were computed for each of the segments investigated for both the transverse and longitudinal axes.
The resultant joint moments were determined for three activities: the ground contact phase of a maximum vertical jump, a full gait cycle of walking at a velocity of 1.4 m . s-I, and a rapid elbow extension at maximum volitional speed. A subject was selected who was in the range of physical dimensions of the subjects in Chandler et al. (1975). For the first two activities, a video and force plate system was used for data collec- tion; for the third a goniometer was used. The subject was videotaped during the activities with a Panasonic F15 camera, with the image recorded onto an S-VHS tape using a Panasonic AG-7350 video recorder. Digitized points on the video images were transformed to inertial coordinates using a two-dimensional version of the direct linear transformation (DLT; Abdel-Aziz & Karara, 1971). The system used a sample rate of 50 Hz, and the accuracy of the measurements was equivalent to 0.1% of the field of view. To remove noise, the data were low-pass filtered using a Butterworth filter, the degree of cutoff being selected by an analysis of residuals. Derivative values were computed using first-order finite difference equations. Ground reaction forces were collected for the first two activi- ties at a sample rate of 1000 Hz using a Kistler force plate (Model 9281B12), mounted according to manufacturer's specifications.
The force and video data were synchronized by a block of light-emitting diodes that flashed on at the moment that data collection was triggered. For the rapid elbow exten- sion, a goniometer was used to measure the angle at the elbow's flexion-extension axis. Data were sampled at 1000 Hz, low-pass filtered, and differentiated using procedures similar to those described for the video-based data. Standard kinematic and kinetic analy- ses were used to compute the resultant joint moments (Winter, 1990). The inertial param- eters for the subjects' segments were determined using the nonlinear equations. The re- sultant joint moments were computed using the original moment of inertia values and perturbated moment of inertia values, and the two sets of resultant joint moments were

522 Challis
then compared. The magnitudes of the moment of inertia perturbations for each body segment were based on analysis of the accuracy of the moments of inertia estimated using the procedures described previously.
For all of the statistical analysis procedures described, the statistical analysis pack- age Minitab (Release 7.1, Minitab, Inc.) was used.
Results and Discussion
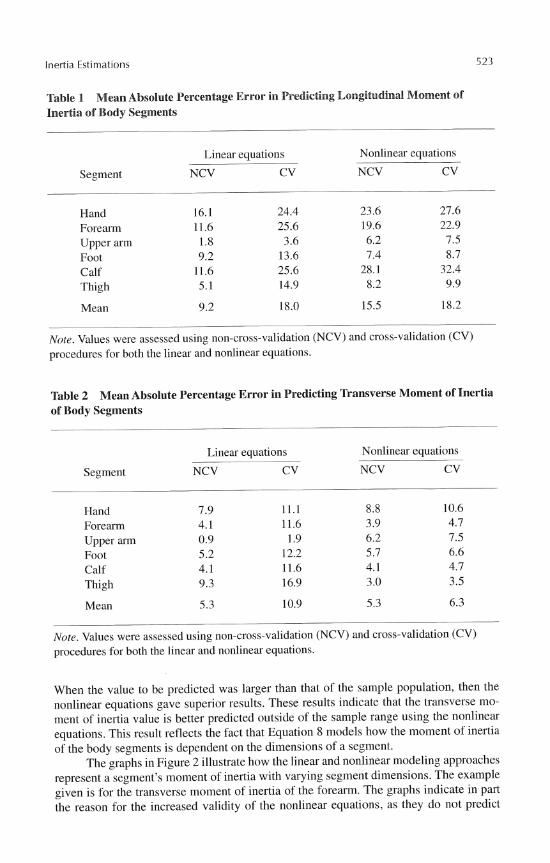
Tables 1 and 2 show that for all body segments examined, the CV procedure gave a higher estimate of error than the NCV procedure, when evaluating either set of equations. For some segments the NCV procedure indicated that the linear equation produced the more accurate moment of inertia predictions, while using the CV procedure indicated that the nonlinear equation (e.g., I , for hand) was more accurate. The error assessment from the CV procedure should be favored, as this assessment criterion represents a more rigorous test of performance. The NCV and CV error estimates are most similar for the nonlinear equations, possibly indicating greater validity of the theoretical basis used in formulating these equations.
The results do not clearly identify the superiority of one set of equations over the other for predicting the moment of inertia for the longitudinal axis. For the moments of inertia about the transverse axis, the nonlinear equations give the best estimate of these values when using the CV evaluation criterion. Irrespective of which set of equations is used, the moment of inertia values for the longitudinal axis are predicted with lower accu- racy than the moment of inertia values for the transverse axis. For examining movement requiring transverse moments of inertia only (i.e., sagittal plane analysis), such a result is reassuring, but if a movement is three-dimensional and involves rotation about the longi- tudinal axes of the segments, errors may be large. Euler's equations used for analyzing moments in three dimensions require the moments of inertia about three principal axes (in their simplest form). The error propagation from the use of these equations would mean that any error in the moment of inertia predicted for one axis would influence the moment determined for the other axes, as well as for the axis with which the moment of inertia value is associated.
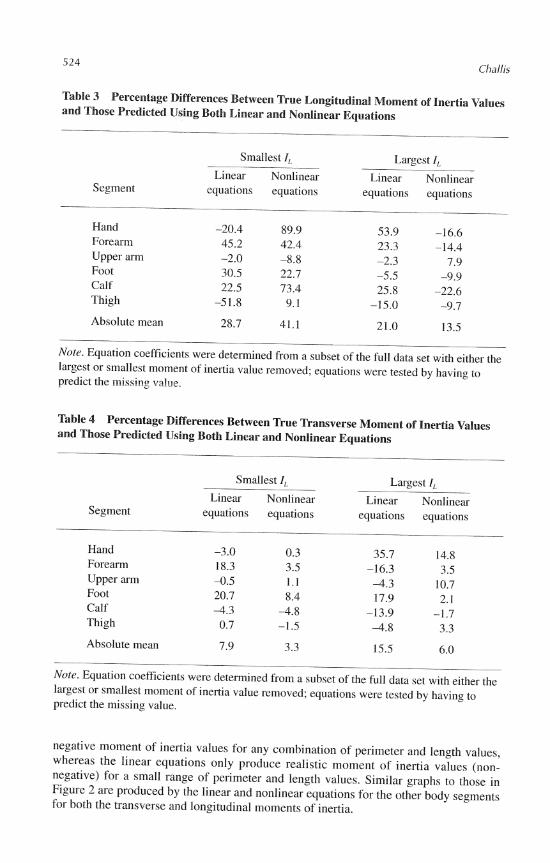
The study of human movement often involves widely different populations (e.g., from elite athletes to postoperative patients), yet either set of equations could be used to determine moment of inertia values for experimental subjects in a given sample. Predict- ing moment of inertia values for subjects who are not similar anthropometrically to the cadavers upon which the equations were based is a potentially erroneous procedure. The error in predicting moment of inertia values using such a procedure was examined. Table 3 shows the errors that may arise from determining longitudinal moment of inertia values for subjects whose true moment of inertia is either smaller or larger than any in the sample population on which the equations have been formulated. For the smaller values, neither set of equations consistently produced superior results, although the absolute mean error was less for the linear equations. For the larger moment of inertia values, the nonlinear equations produced the best results. It is not clear why this difference exists for the small- est and largest samples.
Table 4 shows the corresponding errors that may arise from determining transverse moment of inertia values for subjects whose true moment of inertia value lies outside that of the sample population on which the equations have been formulated. Again it was found that if a moment of inertia value had to be predicted which was smaller than that of the sample population, neither set of equations was clearly superior for all cases, although the nonlinearequations gave the lower mean error for all body segments investigated.
Inertia Estimations 523
Table 1 Mean Absolute Percentage Error in Predicting Longitudinal Moment of Inertia of Body Segments
Segment
Hand Forearm Upper arm Foot Calf Thigh
Mean
Linear equations
NCV CV
16.1 24.4 11.6 25.6 1.8 3.6 9.2 13.6
11.6 25.6 5.1 14.9
9.2 18.0
Nonlinear equations
NCV CV
23.6 27.6 19.6 22.9 6.2 7.5 7.4 8.7
28.1 32.4 8.2 9.9
15.5 18.2
Note. Values were assessed using non-cross-validation (NCV) and cross-validation (CV) procedures for both the linear and nonlinear equations.
Table 2 Mean Absolute Percentage Error in Predicting Transverse Moment of Inertia of Body Segments
Linear equations Nonlinear equations
Segment NCV CV NCV CV
Hand 7.9 11.1 8.8 10.6 Forearm 4.1 11.6 3.9 4.7 Upper arm 0.9 1.9 6.2 7.5 Foot 5.2 12.2 5.7 6.6 Calf 4.1 11.6 4.1 4.7 Thigh 9.3 16.9 3.0 3.5
Mean 5.3 10.9 5.3 6.3
Note. Values were assessed using non-cross-validation (NCV) and cross-validation (CV) procedures for both the linear and nonlinear equations.
When the value to be predicted was larger than that of the sample population, then the nonlinear equations gave superior results. These results indicate that the transverse mo- ment of inertia value is better predicted outside of the sample range using the nonlinear equations. This result reflects the fact that Equation 8 models how the moment of inertia of the body segments is dependent on the dimensions of a segment.
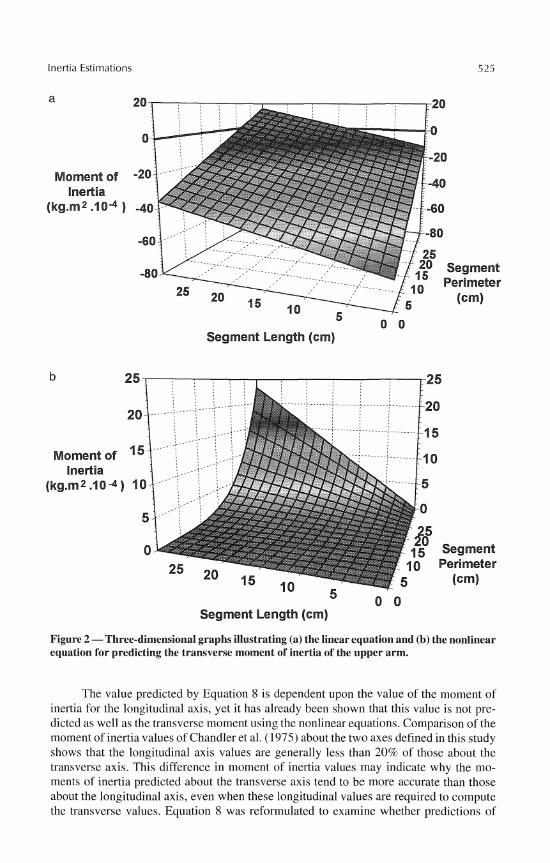
The graphs in Figure 2 illustrate how the linear and nonlinear modeling approaches represent a segment's moment of inertia with varying segment dimensions. The example given is for the transverse moment of inertia of the forearm. The graphs indicate in part the reason for the increased validity of the nonlinear equations, as they do not predict
524 Challis
Table 3 Percentage Differences Between True Longitudinal Moment of Inertia Values and Those Predicted Using Both Linear and Nonlinear Equations
Smallest I, Largest I,
Linear Nonlinear Linear Nonlinear Segment equations equations equations equations
Hand -20.4 89.9 53.9 -16.6 Forearm 45.2 42.4 23.3 -14.4 Upper arm -2.0 -8.8 -2.3 7.9 Foot 30.5 22.7 -5.5 -9.9 Calf 22.5 73.4 25.8 -22.6 Thigh -51.8 9.1 -15.0 -9.7
Absolute mean 28.7 41.1 21.0 13.5
Note. Equation coefficients were determined from a subset of the full data set with either the largest or smallest moment of inertia value removed; equations were tested by having to predict the missing value.
Table 4 Percentage Differences Between True Transverse Moment of Inertia Values and Those Predicted Using Both Linear and Nonlinear Equations
Smallest I, Largest I,
Linear Nonlinear Linear Nonlinear Segment equations equations equations equations
Hand -3 .O 0.3 35.7 14.8 Forearm 18.3 3.5 -I 6.3 3.5 Upper arm -0.5 1.1 -4.3 10.7 Foot 20.7 8.4 17.9 2.1 Calf 4 . 3 4 . 8 -13.9 -1.7 Thigh 0.7 -1.5 -4.8 3.3
Absolute mean 7.9 3.3 15.5 6.0
Note. Equation coefficients were determined from a subset of the full data set with either the largest or smallest moment of inertia value removed; equations were tested by having to predict the missing value.
negative moment of inertia values for any combination of perimeter and length values, whereas the linear equations only produce realistic moment of inertia values (non- negative) for a small range of perimeter and length values. Similar graphs to those in Figure 2 are produced by the linear and nonlinear equations for the other body segments for both the transverse and longitudinal moments of inertia.
Inertia Estimations
Moment of Inertia
(kg.m2 .lo-4
10 ~ - - -
5 (cr..,
3 0 0
Segment Length (cm)
Segment Length (cm)
Figure 2 -Three-dimensional graphs illustrating (a) the linear equation and (b) the nonlinear equation for predicting the transverse moment of inertia of the upper arm.
The value predicted by Equation 8 is dependent upon the value of the moment of inertia for the longitudinal axis, yet it has already been shown that this value is not pre- dicted as well as the transverse moment using the nonlinear equations. Comparison of the moment of inertia values of Chandler et al. (1975) about the two axes defined in this study shows that the longitudinal axis values are generally less than 20% of those about the transverse axis. This difference in moment of inertia values may indicate why the mo- ments of inertia predicted about the transverse axis tend to be more accurate than those about the longitudinal axis, even when these longitudinal values are required to compute the transverse values. Equation 8 was reformulated to examine whether predictions of
526 Challis
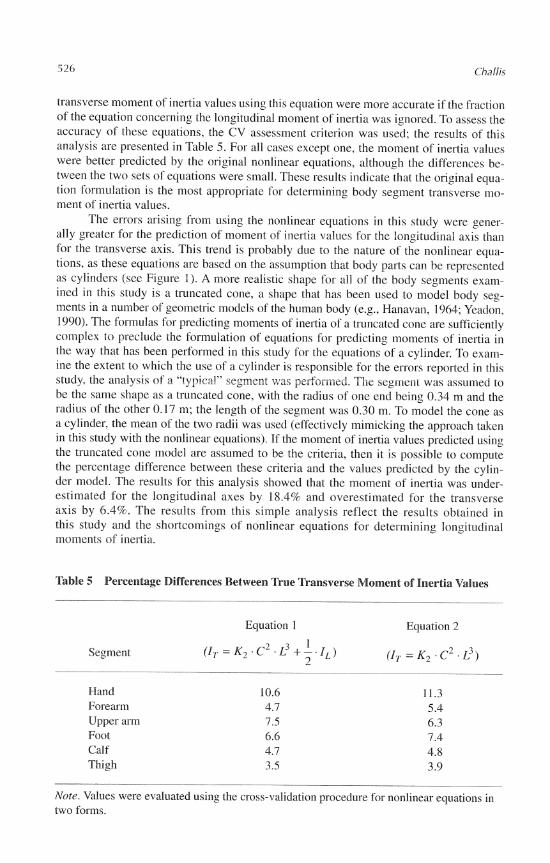
transverse moment of inertia values using this equation were more accurate if the fraction of the equation concerning the longitudinal moment of inertia was ignored. To assess the accuracy of these equations, the CV assessment criterion was used; the results of this analysis are presented in Table 5. For all cases except one, the moment of inertia values were better predicted by the original nonlinear equations, although the differences be- tween the two sets of equations were small. These results indicate that the original equa- tion formulation is the most appropriate for determining body segment transverse mo- ment of inertia values.
The errors arising from using the nonlinear equations in this study were gener- ally greater for the prediction of moment of inertia values for the longitudinal axis than for the transverse axis. This trend is probably due to the nature of the nonlinear equa- tions, as these equations are based on the assumption that body parts can be represented as cylinders (see Figure I). A more realistic shape for all of the body segments exam- ined in this study is a truncated cone, a shape that has been used to model body seg- ments in a number of geometric models of the human body (e.g., Hanavan, 1964; Yeadon, 1990). The formulas for predicting moments of inertia of a truncated cone are sufficiently complex to preclude the formulation of equations for predicting moments of inertia in the way that has been performed in this study for the equations of a cylinder. To exam- ine the extent to which the use of a cylinder is responsible for the errors reported in this study, the analysis of a "typical" segment was performed. The segment was assumed to be the same shape as a truncated cone, with the radius of one end being 0.34 m and the radius of the other 0.17 m; the length of the segment was 0.30 m. To model the cone as a cylinder, the mean of the two radii was used (effectively mimicking the approach taken in this study with the nonlinear equations). If the moment of inertia values predicted using the truncated cone model are assumed to be the criteria, then it is possible to compute the percentage difference between these criteria and the values predicted by the cylin- der model. The results for this analysis showed that the moment of inertia was under- estimated for the longitudinal axes by 18.4% and overestimated for the transverse axis by 6.4%. The results from this simple analysis reflect the results obtained in this study and the shortcomings of nonlinear equations for determining longitudinal moments of inertia.
Table 5 Percentage Differences Between True Transverse Moment of Inertia Values
Segment
Equation 1 Equation 2
Hand Forearm Upper arm Foot Calf Thigh
Note. Values were evaluated using the cross-validation procedure for nonlinear equations in two forms.
Inertia Estimations 527
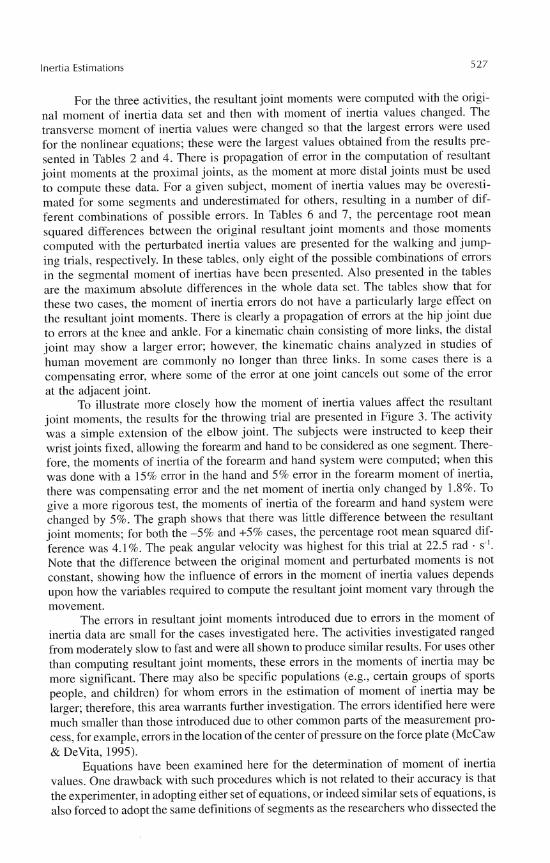
For the three activities, the resultant joint moments were computed with the origi- nal moment of inertia data set and then with moment of inertia values changed. The - transverse moment of inertia values were changed so that the largest errors were used for the nonlinear equations; these were the largest values obtained from the results pre- sented in Tables 2 and 4. There is propagation of error in the computation of resultant joint moments at the proximal joints, as the moment at more distal joints must be used to compute these data. For a given subject, moment of inertia values may be overesti- mated for some segments and underestimated for others, resulting in a number of dif- ferent combinations of possible errors. In Tables 6 and 7, the percentage root mean squared differences between the original resultant joint moments and those moments computed with the perturbated inertia values are presented for the walking and jump- ing trials, respectively. In these tables, only eight of the possible combinations of errors in the segmental moment of inertias have been presented. Also presented in the tables are the maximum absolute differences in the whole data set. The tables show that for these two cases, the moment of inertia errors do not have a particularly large effect on the resultant joint moments. There is clearly a propagation of errors at the hip joint due to errors at the knee and ankle. For a kinematic chain consisting of more links, the distal joint may show a larger error; however, the kinematic chains analyzed in studies of human movement are commonly no longer than three links. In some cases there is a compensating error, where some of the error at one joint cancels out some of the en-or at the adjacent joint.
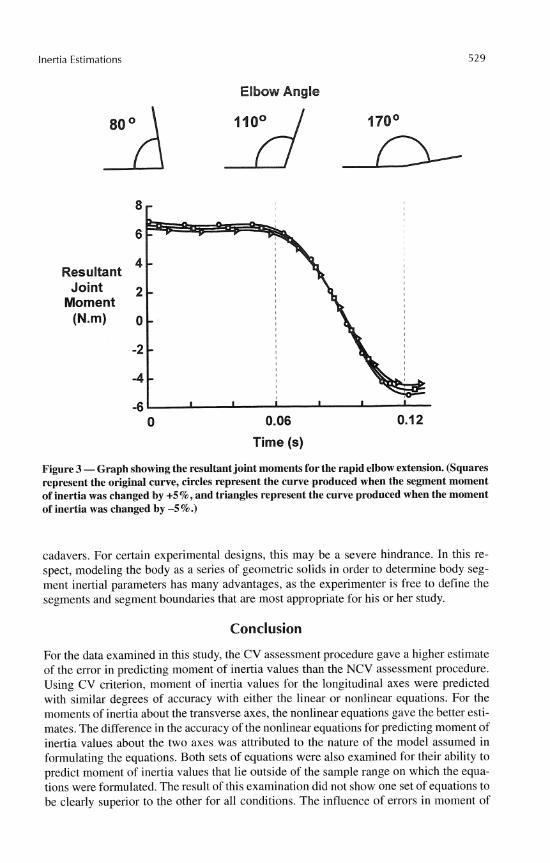
To illustrate more closely how the moment of inertia values affect the resultant joint moments, the results for the throwing trial are presented in Figure 3. The activity was a simple extension of the elbow joint. The subjects were instructed to keep their wrist joints fixed, allowing the forearm and hand to be considered as one segment. There- fore, the moments of inertia of the forearm and hand system were computed; when this was done with a 15% error in the hand and 5% error in the forearm moment of inertia, there was compensating error and the net moment of inertia only changed by 1.8%. To give a more rigorous test, the moments of inertia of the forearm and hand system were changed by 5%. The graph shows that there was little difference between the resultant joint moments; for both the -5% and +5% cases, the percentage root mean squared dif- ference was 4.1%. The peak angular velocity was highest for this trial at 22.5 rad . s-I. Note that the difference between the original moment and perturbated moments is not constant, showing how the influence of errors in the moment of inertia values depends upon how the variables required to compute the resultant joint moment vary through the movement.
The errors in resultant joint moments introduced due to errors in the moment of inertia data are small for the cases investigated here. The activities investigated ranged from moderately slow to fast and were all shown to produce similar results. For uses other than computing resultant joint moments, these errors in the moments of inertia may be more significant. There may also be specific populations (e.g., certain groups of sports people, and children) for whom errors in the estimation of moment of inertia may be larger; therefore, this area warrants further investigation. The errors identified here were much smaller than those introduced due to other common parts of the measurement pro- cess, for example, errors in the location of the center of pressure on the force plate (McCaw & DeVita, 1995).
Equations have been examined here for the determination of moment of inertia values. One drawback with such procedures which is not related to their accuracy is that the experimenter, in adopting either set of equations, or indeed similar sets of equations, is also forced to adopt the same definitions of segments as the researchers who dissected the
528 Challis
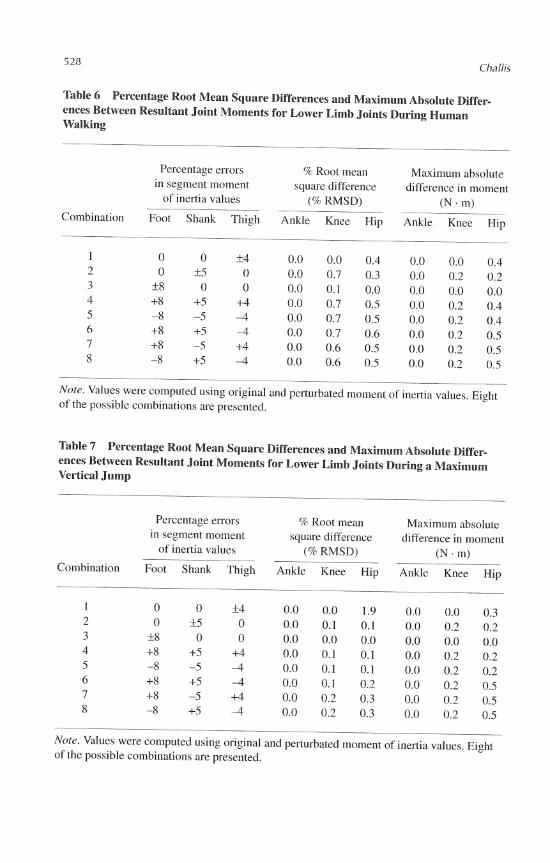
Table 6 Percentage Root Mean Square Differences and Maximum Absolute Differ- ences Between Resultant Joint Moments for Lower Limb Joints During Human Walking
Percentage errors % Root mean Maximum absolute in segment moment square difference difference in moment
of inertia values (% RMSD) (N . m)
Combination Foot Shank Thigh Ankle Knee Hip Ankle Knee Hip
Note. Values were computed using original and perturbated moment of inertia values. Eight of the possible combinations are presented.
Table 7 Percentage Root Mean Square Differences and Maximum Absolute Differ- ences Between Resultant Joint Moments for Lower Limb Joints During a Maximum Vertical Jump
Percentage errors % Root mean Maximum absolute in segment moment square difference difference in moment
of inertia values (% RMSD) (N. m)
Combination Foot Shank Thigh Ankle Knee Hip Ankle Knee Hip
Note. Values were computed using original and perturbated moment of inertia values. Eight of the possible combinations are presented.
inertia Estimations
Elbow Angle
8
6
4 Resultant
Joint 2 Moment
(N.m) 0
-2
-4
-6 0.06 0.12
Time (s)
Figure 3 -Graph showing the resultant joint moments for the rapid elbow extension. (Squares represent the original curve, circles represent the curve produced when the segment moment of inertia was changed by +5%, and triangles represent the curve produced when the moment of inertia was changed by -5%.)
cadavers. For certain experimental designs, this may be a severe hindrance. In this re- spect, modeling the body as a series of geometric solids in order to determine body seg- ment inertial parameters has many advantages, as the experimenter is free to define the segments and segment boundaries that are most appropriate for his or her study.
Conclusion
For the data examined in this study, the CV assessment procedure gave a higher estimate of the error in predicting moment of inertia values than the NCV assessment procedure. Using CV criterion, moment of inertia values for the longitudinal axes were predicted with similar degrees of accuracy with either the linear or nonlinear equations. For the moments of inertia about the transverse axes, the nonlinear equations gave the better esti- mates. The difference in the accuracy of the nonlinear equations for predicting moment of inertia values about the two axes was attributed to the nature of the model assumed in formulating the equations. Both sets of equations were also examined for their ability to predict moment of inertia values that lie outside of the sample range on which the equa- tions were formulated. The result of this examination did not show one set of equations to be clearly superior to the other for all conditions. The influence of errors in moment of

530 Challis
inertia values when computing resultant joint moments for walking, jumping, and a rapid elbow extension was shown to be small.
The limitations of using either set of equations have been identified. The problem of having to use segments and segment boundaries defined for the cadaver study on which the equations were based is also aproblem inherent in this approach. The continued devel- opment of imaging techniques may soon provide a source of accurate data from which equations such as those examined here can be developed or which may provide a means of more thoroughly evaluating existing models, an approach already examined in part by Mungiole and Martin (1990).
References
Abdel-Aziz, Y.L, & Karara, H.M. (197 1). Direct linear transformation from comparator coordinates into object space coordinates in close range photogrammetry. In ASP Symposium on Close Range Photogrammetry (pp. 1-1 8). Falls Church, VA: American Society of Photogrammetry.
Allen, D.M. (1974). The relationship between variable selection and data augmentation and a method for prediction. Technometrics, 16, 125- 127.
Chandler, R.F., Clauser, C.E., McConville, J.T., Reynolds, H.M., &Young, J.W. (1975). Investiga- tion of the inertial properties of the human body (AMRL Technical Report 74-1 37). Wright- Patterson Air Force Base, Ohio.
Forwood, M.R., Neal, R.J., &Wilson, B.D. (1985). Scaling segmental moments of inertia for indi- vidual subjects. Journal of Biomechanics, 18,755-761.
Hanavan, E.P. (1 964). A mathematical model of the human body (AMRL Technical Report 64-102). Wright-Patterson Air Force Base, Ohio.
Hatze, H. (1980). A mathematical model for the computational determination of parameter values of anthropomorphic segments. Journal of Biomechanics, 13, 833-843.
Hinrichs, R.N. (1 985). Regression equations to predict segmental moments of inertia from anthropo- metric measurements. Journal of Biomechanics, 18,621-624.
Jensen, R.K. (1978). Estimation of the biomechanical properties of three body types using a photo- grammetric method. Journal of Biomechanics, 11,349-358.
McCaw, S.T., & DeVita, P. (1995). Errors in alignment of center of pressure and foot coordinates affect predicted lower extremity torques. Journal of Biomechanics, 28,985-988.
Mungiole, M., & Martin, P.E. (1990). Estimating segment inertial properties: Comparison of mag- netic resonance imaging with existing methods. Journal of Biomechanics, 23, 1039-1 046.
Vaughan, C.L., Davis, B.L., & O'Connor, J.C. (1992). Dynamics of human gait. Champaign, k Human Kinetics.
Winter, D.A. (1990). Biomechanics and motor control of human movement. Chichester, UK: Wiley. Yeadon, M.R. (1990). The simulation of aerial movement. Part 11: A mathematical inertia model of
the human body. Journal of Biomechanics, 23,67-74. Yeadon, M.R., & Morlock, M. (1989). The appropriate use of regression equations for the estimation
of segmental inertia parameters. Journal of Biomechanics, 27,683-689. Zatsiorsky, V., Seluyanov, V., & Chugunova, L. (1990). Methods of determining mass inertial char-
acteristics of human body segments. In G.G. Chernyi & S.A. Regirer (Eds.), Contemporary problems of biomechanics (pp. 272-291). Moscow: Mir.
Acknowledgments
The author acknowledges the support of the Nufield Foundation for some of the work con- tained in this paper.